Стрелочный привод служит для изменения маршрута рельсового транспортного средства по железнодорожному пути. Обычно он состоит из электрогенератора усилий, вращательное движение которого преобразуется в линейное движение с помощью шпинделя или зубчатой рейки. Частью механической системы большей частью является также механизм сцепления, который препятствует приложению слишком большой силы к рельсовому пути.
В процессе производства или реновации стрелочных приводов должны быть окончательно отрегулированы и проверены создаваемые стрелочным приводом усилия. Цель при этом, среди прочего, заключается в том, чтобы эти создаваемые стрелочным приводом усилия не превышали и, соответственно, не были ниже определенных верхних и нижних пределов. Для этого на испытательном стенде к стрелочному приводу как испытуемому образцу прикладывается сила противодействия, соответствующая усилиям остряка стрелочного перевода в последующем рабочем режиме, в то время, когда стрелочный привод осуществляет на испытательном стенде процессы регулирования. Далее, испытательный стенд может также активно прикладывать тяговые усилия к этому испытуемому образцу в то время, когда он не осуществляет никаких процессов регулирования. Для этого стрелочный привод устанавливается на испытательный стенд, закрепляется, подключается к контрольно-испытательной системе, тестируется, демонтируется и в заключение снова снимается.
Предельные механические отклонения стрелочных приводов от заданного размера очень сильно различаются в зависимости от области применения, изготовителя и от истории разработки. Снаружи общим для всех стрелочных приводов элементом является так называемая рабочая линейка, которая передает линейное движение и усилие привода на остряк стрелочного перевода, а также (при необходимости) так называемые контрольные линейки, которые тоже соединены с остряком стрелочного перевода и обеспечивают механическое обратное извещение о положении остряка на привод. В идеальном случае стрелочный привод для такого испытания закрепляется таким же образом, как и позднее на рельсовом пути (большей частью с помощью нескольких болтовых соединений). Вследствие различных габаритов приводов оба этих подвижных компонента находятся в разных положениях относительно точек крепления стрелочного привода.
Из документа "PT 10K Multi: Variabler Prüftisch für Weichenstellantriebe", доступного в интернете с 31.03.2014 на сайте http://www.probitron.de/ fileadmin/pdf/datenblatt_multi.pdf, известен варьируемый испытательный стенд для стрелочных приводов, состоящий из базового модуля и сменных испытательных модулей. Базовый модуль содержит гидравлическую систему в качестве генератора усилий, систему управления, а также измерительное и защитное оборудование. Для различных моделей стрелочных приводов имеются индивидуальные испытательные модули, которые согласно изображению в этой публикации состоят из стенда с роликами и установленных индивидуально под конкретный стрелочный привод фиксаторов положения. Привязка соединительной точки между испытуемым образцом и генератором усилий испытательного стенда осуществляется, таким образом, за счет монтажа испытуемого образца на испытательном модуле, выполненном индивидуально для этого испытуемого образца.
Перед данным изобретением поставлена задача создания альтернативных для уровня техники способа и установки для испытания стрелочных приводов.
Эта задача согласно изобретению решается посредством установки, содержащей по меньшей мере одно приемное устройство. Такое приемное устройство содержит по меньшей мере два несущих элемента, которые выполнены с возможностью размещения стрелочного привода в качестве испытуемого образца или для размещения монтажного вагона, на котором смонтирован стрелочный привод в качестве испытуемого образца, и механизм, выполненный с возможностью перемещения несущего элемента как в горизонтальном, так и в вертикальном направлении. Эта установка содержит также испытательный стенд, выполненный с возможностью приложения силы противодействия к испытуемому образцу посредством генератора усилий во время выполнения испытуемым образцом процессов регулирования на испытательном стенде, благодаря чему такой испытательный стенд пригоден для регулировки и/или проверки усилий, которые развивает испытуемый образец. Генератор усилий и указанный механизм независимы друг от друга механически и электрически, так что перемещение этих несущих элементов возможно без воздействия на испытательный стенд или генератор усилий, благодаря чему возможна установка заданного положения соединения между испытуемым образцом и генератором усилий.
В процессе осуществления способа испытания стрелочного привода механизм перемещает по меньшей мере два несущих элемента как в горизонтальном, так и в вертикальном направлении. Стрелочный привод в качестве испытуемого образца монтируется на указанных несущих элементах. В порядке альтернативы монтажный вагон (20) захватывается и/или приподнимается механизмом с указанными несущими элементами, на котором закреплен стрелочный привод в качестве испытуемого образца. Испытательный стенд с помощью генератора усилий прикладывает силу противодействия к этому испытуемому образцу в то время, когда испытуемый образец на испытательном стенде выполняет процессы регулирования, причем усилия, которые создает этот испытуемый образец, регулируются и/или проверяются. Несущие элементы перед установкой испытуемого образца перемещаются, не оказывая влияния на испытательный стенд или на генератор усилий, за счет чего устанавливается заданное положение соединения между испытуемым образцом и генератором усилий.
Указываемые в дальнейшем преимущества необязательно должны достигаться исключительно предметом независимых пунктов формулы изобретения. Более того, при этом может идти речь и о преимуществах, которые достигаются лишь посредством отдельных форм осуществления изобретения, вариантов или модификаций.
Приемное устройство делает возможным размещение множества испытуемых образцов независимо от их геометрических габаритов. Для этого в нем дополнительно предусмотрен гибкий адаптационный механизм, который - при необходимости автоматически - может быть перемещен в требуемые положения. Таким образом, создано очень гибкое техническое решение. Указанные установка и способ делают возможным автоматизированное техническое решение для фиксации и подключения передачи сил для стрелочного привода. Положительным является то, что положение генератора усилий и чувствительных измерительных датчиков для повторного измерения приложенных сил не должно изменяться. Далее, всегда гарантируется, что приложение силы во время измерения происходит в направлении движения.
Согласно одному варианту выполнения указанный механизм выполнен с возможностью регулирования горизонтального расстояния между несущими элементами. Преимуществом здесь является то, что могут быть с подгонкой размещены и позиционированы испытуемые образцы различной ширины.
В одной модификации указанный механизм выполнен с возможностью перемещения несущих элементов независимо друг от друга как в горизонтальном, так и в вертикальном направлении.
Преимуществом здесь является то, что могут быть с подгонкой размещены и позиционированы также испытуемые образцы с асимметричными отклонениями от заданного размера.
Согласно одному варианту выполнения указанный механизм для перемещения несущих элементов в горизонтальном и вертикальном направлении имеет горизонтальные и вертикальные линейные направляющие, в частности линейный подшипник скольжения, направляющие в форме ласточкина хвоста, профилированные направляющие шины или систему из двух направляющих шин и сепаратора с телами качения между ними (Käfigschienenführungen).
Перемещение несущих элементов, в частности в горизонтальном направлении, может осуществляться при этом путем сдвигания вручную. В заданном конечном положении несущий элемент затем фиксируется посредством зажимного крепления. В порядке альтернативы или дополнительно могут применяться линейные приводы.
В одной модификации указанный механизм для каждого из несущих элементов снабжен собственным горизонтальным линейным приводом и собственным вертикальным линейным приводом, которые выполнены с возможностью автоматизированного перемещения соответствующего несущего элемента в требуемую позицию. Эти линейные приводы обеспечивают возможность высокоточного позиционирования несущих элементов, в частности и в том случае, если они имеют большой собственный вес или уже нагружены испытуемыми образцами. Кроме того, позиционирование несущих элементов может быть автоматизировано посредством этих линейных приводов.
Согласно одному варианту выполнения указанный механизм образован по меньшей мере двумя вертикально установленными крестовыми столами и/или вертикально установленными двухкоординатными линейными приводами, на каждом из которых установлено по одному из несущих элементов.
В порядке альтернативы оба несущих элемента могут быть смонтированы и на одном единственном вертикально установленном крестовом столе или, соответственно, двухкоординатном линейном приводе, вследствие чего, однако, возможности регулирования ограничиваются.
В одной модификации каждый несущий элемент смонтирован на салазках несущего элемента, которые могут перемещаться соответствующим вертикальным линейным приводом. Каждый вертикальный линейный привод смонтирован на поперечных салазках, которые могут перемещаться соответствующим горизонтальным линейным приводом.
Согласно одному варианту выполнения линейные приводы взаимодействуют с соответствующими параллельными направляющими, которые сконструированы для направления соответствующих салазок. Линейные приводы содержат по одному гидравлическому или электрическому линейному двигателю или линейному актуатору. В одной модификации установка содержит систему управления, в которой позиции несущих элементов запрограммированы в зависимости от типов испытуемых образцов, причем эта система управления выполнена с возможностью управления линейными приводами и автоматизированного перемещения несущих элементов в заданные позиции для несущих элементов.
Согласно одному варианту выполнения указанный механизм рассчитан таким образом, чтобы несущими элементами захватывать и/или приподнимать монтажный вагон, на котором испытуемый образец закреплен болтовыми соединениями. Несущие элементы содержат для этого крепежные элементы, в частности расположенные с внутренней стороны болты, штифты, захваты, углубления или горизонтальные сверленые отверстия, которые обеспечивают захватывание монтажного вагона, в частности посредством зажимного закрепления монтажного вагона между несущими элементами.
Преимуществом здесь является то, что испытуемый образец может быть смонтирован и испытан непосредственно на монтажном вагоне, и нет необходимости в специальном перемещении и привинчивании испытуемого образца.
В одной модификации несущие элементы снабжены вертикальными резьбовыми сверлеными отверстиями, которые позволяют закреплять испытуемый образец путем привинчивания. Преимуществом здесь является то, что испытуемый образец может быть закреплен точно так же, как и на рельсовом пути.
Согласно одному варианту выполнения несущие элементы с внешней стороны имеют крепежные средства, в частности, ввинченные в горизонтальные резьбовые сверленые отверстия профили в форме ласточкина хвоста, которые выполнены с возможностью крепления дополнительных крепежных элементов для испытуемого образца, в частности зажимов.
Преимуществом здесь является то, что на таких несущих элементах могут быть надежно зафиксированы и испытуемые образцы с неизвестными до сих пор или неблагоприятными габаритами.
В одной модификации приемное устройство смонтировано на самом испытательном стенде или рядом с испытательным стендом на основании.
Согласно одному варианту выполнения испытательный стенд имеет интерфейс испытательного стенда, содержащий по меньшей мере одну горизонтальную направляющую. Установка содержит также салазки, которые могут перемещаться вдоль упомянутой горизонтальной направляющей. Установка содержит также по меньшей мере два из приемных устройств, которые смонтированы на этих салазках рядом друг с другом.
Такая форма осуществления обладает тем преимуществом, что с помощью салазок предоставляется второе приемное устройство и, тем самым, вторая монтажная позиция. Это означает, что во время испытательного процесса первого стрелочного привода, который на испытательной позиции смонтирован на салазках, уже с боковым смещением может быть смонтирован на другом приемном устройстве еще один стрелочный привод, который позднее посредством бокового перемещения горизонтальных салазок приводится на эту испытательную позицию.
В одной модификации установка содержит ходовую тележку, которая состоит, в частности, из роликов, колес или направляющей и посредством которой салазки опираются на основание.
Согласно одному варианту выполнения установка содержит по меньшей мере одну защитную стенку, смонтированную на салазках между приемными устройствами. В порядке альтернативы установка содержит защитный колпак, который смонтирован на испытательном стенде.
В одной модификации установка содержит адаптационный вагон, имеющий тележку, на которой смонтировано приемное устройство. Тележка имеет место пристыковки вагона, через которое адаптационный вагон может механически соединяться с интерфейсом испытательного стенда.
Адаптационный вагон может быть быстро и несложно соединен с испытательным стендом. Тем самым можно также пространственно полностью отделить друг от друга адаптивное управление и испытание. Однажды адаптированный на таком адаптационном вагоне стрелочный привод может проходить через различные дополнительные контрольные устройства (например, электрические испытания или обкатки) без необходимости новой подгонки вручную.
Гибкое адаптивное управление с помощью подвижного адаптационного вагона обеспечивает возможность укомплектования указанным испытуемым образцом вне испытательного стенда. Это предпочтительно, например, если испытательный стенд находится не в одной и той же области, что и обшивка крана. Адаптационный вагон может быть при необходимости пристыкован не только к нескольким станциям адаптивного управления, но и к другим испытательным позициям, например, для электрических испытаний или процессов приема для механизма сцепления стрелочного привода.
Адаптационный вагон, таким образом, позволяет быстро и прежде всего в любой последовательности отправлять стрелочные приводы через один или несколько испытательных стендов без дополнительных затрат на оснастку. Простая смена станций дает то дополнительное преимущество, что весь ход испытаний может быть разбит таким образом, что дорогое оборудование потребуется только для отдельных оптимально используемых испытательных позиций, и не останется неиспользуемым во время других испытаний. Простые, но требующие много времени проверочные задачи могут быть вынесены на отдельные, простые испытательные позиции.
Согласно одному варианту выполнения установка содержит станцию адаптивного управления, которая выполнена с возможностью механического соединения интерфейса адаптационного вагона с этой станцией адаптивного управления и с возможностью перемещения несущих элементов как в горизонтальном, так и в вертикальном направлении посредством указанного механизма.
В одной модификации указанный механизм для каждого из несущих элементов имеет приводной вал для каждой самотормозящей исполнительной передачи для перемещения соответствующего несущего элемента в направлении х. Кроме того, механизм для каждого из несущих элементов имеет приводной вал для самотормозящей исполнительной передачи для перемещения соответствующего несущего элемента в направлении y, перпендикулярном направлению х.
Согласно одному варианту выполнения приводные валы имеют по одной механической муфте для передачи вращающего момента, через которые эти приводные валы при механическом соединении адаптационного вагона к станции адаптивного управления могут быть автоматически пристыкованы к исполнительным приводам в станции адаптивного управления.
В одной модификации интерфейс вагона содержит электрический штекерный соединитель, который при механическом присоединении адаптационного вагона к испытательному стенду или к станции адаптивного управления автоматически вставляется в электрический штекерный соединитель интерфейса испытательного стенда или станции адаптивного управления.
Согласно одному варианту выполнения адаптационный вагон содержит исполнительный привод для каждого приводного вала. Станция адаптивного управления через электрические штекерные соединители доставляет электрическую энергию и управляющие сигналы на исполнительные приводы для перемещения несущих элементов.
В одной модификации установка дополнительно содержит монтажный вагон, который выполнен с возможностью размещения стрелочного привода и может фиксироваться между несущими элементами посредством геометрического замыкания. Эта модификация обеспечивает возможность размещать простые стандартные монтажные вагоны для испытаний прямо между несущими элементами. Для этого стрелочный привод сначала монтируют на стандартном монтажном вагоне. Для последующего испытания этот монтажный вагон закрепляется на адаптационном вагоне, который может автоматически пристыковываться к различным испытательным позициям и воспринимать испытательные усилия. Если имеются сборочные линии, которые работают без монтажного вагона, то испытуемый образец может быть также привинчен прямо к консолям адаптационного вагона.
В одной модификации способа несущие элементы перемещаются независимо друг от друга как в горизонтальном, так и в вертикальном направлении.
Согласно одному варианту выполнения способа с помощью системы управления, в которой позиции несущих элементов запрограммированы в зависимости от типов испытуемых образцов, регулируют линейные приводы и автоматически перемещают несущие элементы в одну из позиций для несущих элементов.
В одной модификации способа адаптационный вагон своим интерфейсом пристыковывается к станции адаптивного управления. При этом штекерный соединитель интерфейса вагона автоматически вставляется в штекерный соединитель станции адаптивного управления, за счет чего исполнительные приводы адаптационного вагона снабжаются электричеством. В порядке альтернативы исполнительные приводы станции адаптивного управления пристыковываются к механическим муфтам интерфейса вагона для передачи вращающего момента. Адаптационный вагон приспосабливается под испытуемый образец или монтажный вагон за счет того, что несущие элементы адаптационного вагона посредством исполнительных приводов этого адаптационного вагона или исполнительных приводов станции адаптивного управления перемещаются в позиции, которые являются подходящими для размещения испытуемого образца или монтажного вагона. Испытуемый образец устанавливается на адаптационный вагон. В порядке альтернативы этот монтажный вагон зажимается между несущими элементами с геометрическим замыканием. В заключение адаптационный вагон своим интерфейсом пристыковывается к испытательному стенду.
Согласно одному варианту выполнения указанная установка используется для регулирования заданного соединительного положения между испытуемым образцом и генератором усилий на испытательном стенде.
В одной модификации приемное устройство указанной установки используется для захватывания и/или подъема монтажного вагона, на котором смонтирован испытуемый образец. Согласно одному варианту выполнения указанная установка используется для регулировки и/или проверки усилий, которые создает стрелочный привод в качестве испытуемого образца.
Ниже примеры выполнения данного изобретения подробнее разъясняются с привлечением чертежей. На этих чертежах одинаковые или функционально подобные элементы снабжены одними и теми же ссылочными обозначениями, если нет никаких других указаний. На чертежах показано следующее:
Фиг. 1 - испытательный стенд для проверки стрелочного привода, к которому прочно привинчивается испытуемый образец,
Фиг. 2A - вид сбоку испытательного стенда с устройством для размещения испытуемого образца в первом вертикальном позиционировании,
Фиг. 2B - вид сбоку испытательного стенда по Фиг. 2A, причем устройство для размещения испытуемого образца вертикально опущено, с укрупненным видом продольного несущего элемента указанного устройства,
Фиг. 3A - вид спереди показанного на Фиг. 2A устройства,
Фиг. 3B - вид спереди опущенного устройства по Фиг. 2B, с укрупненным видом продольного несущего элемента,
Фиг. 3C - вид спереди устройств для размещения испытуемого образца, у которого оба продольных несущих элемента были передвинуты в различные вертикальные позиции, чтобы разместить асимметричный испытуемый образец 1,
Фиг. 4A - вид сверху испытательного стенда и устройства по Фиг. 2A и Фиг. 3A,
Фиг. 4B - вид сверху показанного на Фиг. 2B и Фиг. 3B испытательного стенда с опущенным и передвинутым вбок устройством для размещения испытуемого образца, причем левый продольный несущий элемент вновь показан укрупненно,
Фиг. 5 - вид спереди механизма, пригодного для независимого друг от друга перемещения несущих элементов как в горизонтальном, так и в вертикальном направлении,
Фиг. 6 - укрупненный вид сбоку механизма по Фиг. 5, причем дополнительно показан продольный несущий элемент, испытуемый образец, генератор усилий и испытательный стенд,
Фиг. 7A - вид спереди монтажного вагона, к которому привинчен испытуемый образец, причем монтажный вагон зажат между продольными несущими элементами показанного на Фиг. 2A-6 устройства,
Фиг. 7B - укрупненный вид фрагмента с Фиг. 7A, на котором представлено альтернативное выполнение зажимного соединения между продольными несущими элементами и монтажным вагоном,
Фиг. 8A - дополнительные зажимы, которые посредством соединений в виде ласточкина хвоста устанавливаются на продольных несущих элементах и передают дополнительные зажимные усилия на испытуемый образец, вид спереди,
Фиг. 8B - один из двух зажимов по Фиг. 8A, вид сбоку,
Фиг. 9 - вид сверху испытательного стенда, на котором салазки с двумя монтажными участками для стрелочных приводов в качестве испытуемых образцов установлены с возможностью перемещения посредством горизонтальной направляющей в горизонтальном направлении,
Фиг. 10 - испытательный стенд по Фиг. 9, причем салазки с монтажными участками были сдвинуты влево,
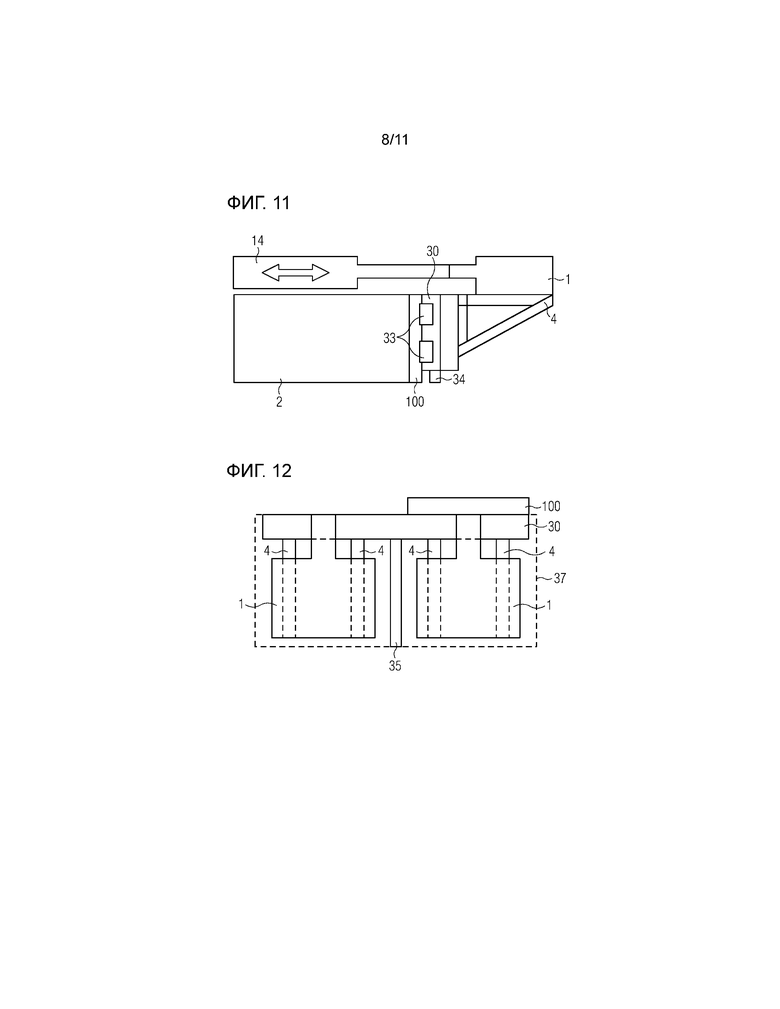
Фиг. 11 - вид сбоку испытательного стенда по Фиг. 9 и Фиг. 10, на котором показаны в разрезе салазки и горизонтальная направляющая,
Фиг. 12 - укрупненный вид испытательного стенда по Фиг. 9-11 с защитной стенкой, смонтированной на салазках и перемещающейся вместе с ними,
Фиг. 13 - укрупненный вид испытательного стенда по Фиг. 9-11 с защитным колпаком, который опущен над испытательной площадкой,
Фиг. 14 - укрупненный вид испытательного стенда по Фиг. 9-11, на котором установлен очень большой испытуемый образец,
Фиг. 15 - вид сверху адаптационного вагона с регулируемыми несущими элементами,
Фиг. 16 - стыковка адаптационного вагона по Фиг. 15 с испытательным стендом, вид сбоку,
Фиг. 17 - укрупненный вид интерфейса вагона, который выполнен с возможностью механического соединения с интерфейсом испытательного стенда, и
Фиг. 18 - адаптационный вагон, который пристыкован к станции адаптивного управления.
На этих чертежах одинаковые или функционально подобные элементы снабжены одними и теми же ссылочными обозначениями, если нет никаких других указаний.
На Фиг. 1 показан испытуемый образец 1; здесь это стрелочный привод, который закреплен на переходной площадке 15, привинченной к испытательному стенду 2. Рабочая линейка 13 приводится в действие испытуемым образцом 1 в направлении 11 силы и движения. Рабочая линейка 13 через соединительную точку 16 связана с генератором 14 усилий, благодаря чему обеспечивается возможность измерения 12 усилия. Генератором 14 усилий на испытательном стенде является, например, гидравлический или электрический линейный привод.
На Фиг. 2A показан вид сбоку устройства для размещения испытуемого образца, которое смонтировано на испытательном стенде 2. На этом испытательном стенде 2 здесь находится также генератор 14 усилий, который взаимодействует с испытуемым образцом 1 для регулирования и проверочного испытания усилий, производимых испытуемым образцом 1. Кроме того, генератор 14 усилий может также активно прикладывать тяговые усилия к испытуемому образцу 1 в то время, когда он не выполняет никаких процессов регулирования. Испытуемый образец 1 привинчен к продольным несущим элементам 4, которые в свою очередь навешены на механизме 3, закрепленном сбоку на испытательном стенде 2. На Фиг. 2A эти продольные несущие элементы 4 показаны в их верхней позиции.
На Фиг. 2B показан еще один вид сбоку примера осуществления по фиг. 2A, причем продольные несущие элементы 4 были вертикально опущены. На Фиг. 2B содержится также (как и на Фиг. 3B и Фиг. 4B) укрупненный вид переднего, соответственно, левого продольного несущего элемента 4. На этом виде сбоку продольного несущего элемента 4 на Фиг. 2B виден профиль 6 в форме ласточкина хвоста, который привинчен через горизонтальные резьбовые сверленые отверстия 51 в продольном несущем элементе 4.
На Фиг. 3A показан вид спереди примера осуществления по фиг. 2A, причем продольные несущие элементы 4, как и на Фиг. 2A, позиционированы у верхнего ограничителя. Стрелками на Фиг. 3A показано, что продольные несущие элементы 4 могут быть передвинуты горизонтально в обоих направлениях. Расстояние между этими продольными несущими элементами 4 тоже может регулироваться.
На Фиг. 3B показан вид спереди примера осуществления с опущенными продольными несущими элементами 4 согласно Фиг. 2B. Благодаря опусканию продольных несущих элементов 4 можно установить испытуемый образец 1, имеющий большую конструктивную высоту, чем испытуемый образец 1 по фиг. 2A, соответственно, Фиг. 3A. За счет опускания продольных несущих элементов 4 обеспечивается возможность стационарной фиксации упомянутой в связи с Фиг. 1 соединительной точки 16. Преимуществом здесь является то, что позицию генератора 14 усилий, а также чувствительных измерительных датчиков не требуется перемещать для показанного на Фиг. 1 измерения 12 усилия. Кроме того, гарантируется, что приложение силы со стороны генератора 14 усилий и испытуемого образца 1 всегда происходит в показанном на Фиг. 1 направлении 11 силы и движения. Поскольку генератор 14 усилий и механизм 3 являются механически и электрически независимыми друг от друга, то продольные несущие элементы 4 могут быть перемещены в соответствующие требуемые позиции без воздействия на чувствительные измерительные датчики и генератор 14 усилий.
На Фиг. 3B показан дополнительно, аналогично Фиг. 2B, левый продольный несущий элемент 4 в укрупненном виде, причем снова виден профиль 6 в форме ласточкина хвоста. Он служит для насаживания других крепежных элементов, в частности показанных на Фиг. 8A и Фиг. 8B зажимов 61, 62, которыми испытуемые образцы 1 с особыми габаритами могут закрепляться дополнительно. На внутренней стороне продольного несущего элемента 4 на Фиг. 3B в увеличенном масштабе показаны болты 7, которые служат для адаптивного регулирования монтажного вагона 20, как показано на Фиг. 7A.
На Фиг. 3C показан вид спереди одного варианта устройства по фиг. 2A-3B, у которого оба продольных несущих элемента были передвинуты в различные вертикальные позиции, чтобы разместить асимметричный испытуемый образец 1.
На Фиг. 4A показан вид сверху устройства, корреспондирующийся с видом спереди по Фиг. 3A и видом сбоку по Фиг. 2A.
На Фиг. 4B показан соответственно вид сверху, корреспондирующийся с видом сбоку по фиг. 2B и видом спереди по фиг. 3B. При этом видно, что продольные несущие элементы 4 были передвинуты влево, чтобы разместить асимметричный в горизонтальном направлении испытуемый образец 1. Левый продольный несущий элемент 4 тоже детально показан на виде сверху на Фиг. 4B в увеличенном масштабе. Помимо уже упомянутого профиля 6 в форме ласточкина хвоста и болтов 7 на этом виде сверху представлены вертикальные резьбовые сверленые отверстия 52, через которые может привинчиваться испытуемый образец 1. Благодаря наличию достаточного количества подходящим образом позиционированных вертикальных резьбовых сверленых отверстий 52 гарантировано, что испытуемые образцы 1 могут быть достаточно гибко позиционированы и по третьей координате, по которой невозможна регулировка посредством механизма 3.
На Фиг. 5 детально показан упомянутый механизм 3 по Фиг. 2A-4B, вид спереди. На верхней направляющей 111 поперечных салазок и на нижней направляющей 112 поперечных салазок установлены с возможностью горизонтального перемещения левые поперечные салазки 8 и правые поперечные салазки 9. Эти левые поперечные салазки 8 передвигаются вдоль горизонтальных направляющих 111, 112 посредством верхней линейной оси 121. Соответственно, правые поперечные салазки 9 передвигаются вдоль направляющих 111, 112 посредством нижней линейной оси 122. Согласно Фиг. 5 указанные левые поперечные салазки 8 и правые поперечные салазки 9 могут независимо друг от друга передвигаться горизонтально.
На левых поперечных салазках 8 смонтированы левые монтажные салазки 81, которые перемещаются по левой направляющей 82 монтажных салазок и приводятся в действие посредством левой линейной оси 83. На левых монтажных салазках 81 смонтирован левый продольный несущий элемент 4, который детально показан на Фиг. 2B, Фиг. 3B и Фиг. 4B.
Соответственно, на правых поперечных салазках 9 смонтированы правые монтажные салазки 91, которые, в свою очередь, перемещаются по правой направляющей 92 монтажных салазок и приводятся в действие посредством правой линейной оси 93. На правых монтажных салазках 91 смонтирован правый продольный несущий элемент 4, показанный на Фиг. 3A, Фиг. 3B, Фиг. 3C, Фиг. 4A и Фиг. 4B.
Под упомянутыми линейными осями понимаются электрические или гидравлические линейные приводы, линейные двигатели или линейные актуаторы. Подходящие прочные линейные приводы и конструкции несущих элементов известны, например, из вилочных автопогрузчиков, стальные зубцы которых могут переставляться с изменением горизонтального расстояния между ними и которые могут перемещаться по вертикали посредством гидравлического привода вертикально.
В одном альтернативном выполнении такие горизонтальные, а при необходимости и вертикальные линейные приводы заменяются ручными регулировочными устройствами. В другом альтернативном выполнении дополнительно предусмотрено лишь по одному линейному приводу для горизонтального и/или вертикального перемещения обоих несущих элементов, так что продольные несущие элементы 4 могут перемещаться в горизонтальном и/или вертикальном направлении только синхронно.
На Фиг. 6 показан вид сбоку устройства соответственно виду спереди по фиг. 5, в сечении на уровне механизма 3. На этом виде сбоку по Фиг. 6 видны левые поперечные салазки 8, которые перемещаются по верхней направляющей 111 поперечных салазок и нижней направляющей 112 поперечных салазок и приводятся в действие посредством верхней линейной оси 121. На левых поперечных салазках 8 смонтированы левые монтажные салазки 81, на которых смонтирован левый продольный несущий элемент 4. Согласно Фиг. 6 испытательные усилия 141 действуют между генератором 14 усилий и испытуемым образцом 1, так что испытуемый образец в виде стрелочного привода во взаимодействии с генератором 14 усилий моделирует процессы регулирования в стрелке. Дополнительно сила веса 144 испытуемого образца воздействует на продольный несущий элемент 4. Указанная верхняя направляющая 111 поперечных салазок в качестве первого усилия 142 должна воспринимать усилие, которое складывается как из реакции на испытательные усилия 141, так и из силы веса 144 испытуемого образца 1. Это справедливо и для нижней направляющей 112 поперечных салазок, на которую, следовательно, воздействует второе усилие 143. Помимо навешивания направляющих 111, 112 поперечных салазок необходимо поэтому выполнять достаточно прочным также и интерфейс 100 между всем механизмом и испытательным стендом 2, чтобы можно было выдержать силу веса 144 испытуемого образца 1 и дополнительно реакцию на испытательные усилия 141.
В порядке альтернативы показанному на Фиг. 6 интерфейс 100 может реализован и через основание, причем механизм для перемещения продольных несущих элементов привинчивается непосредственно к основанию. Испытательный стенд 2 и механизм в этом варианте крепятся отдельно.
На Фиг. 6 продольные несущие элементы 4 показаны в слегка опущенном положении. И в этом случае гарантируется, что соединительная точка, а вследствие этого и генератор 14 усилий могут постоянно удерживаться на испытательном стенде 2 на определенной высоте.
На Фиг. 7A представлен еще один вид спереди указанного устройства. Монтажный вагон 20 зажимается и фиксируется с геометрическим замыканием путем соответствующего горизонтального перемещения - здесь путем стягивания друг с другом - продольных несущих элементов 4 с помощью болтов 7. Дополнительно к показанным на Фиг. 7A стрелкам при этом, как уже указывалось выше, каждый из продольных несущих элементов 4 перемещается как в горизонтальном, так и в вертикальном направлении. Вследствие этого закрепленный монтажный вагон 20 как единое целое может быть приподнят с помощью продольных несущих элементов 4. Можно также сначала приподнять этот монтажный вагон 20, снять тележку, и затем переместить монтажный вагон 20 в более глубокую позицию, чем это было бы допустимо с тележкой.
На монтажном вагоне 20 испытуемый образец 1 жестко закреплен винтами 5. Для его использования на испытательном стенде требуется, чтобы приемная площадка монтажного вагона 20 была достаточно прочной для того, чтобы она могла воспринимать упомянутые выше испытательные усилия и передавать их дальше через продольные несущие элементы 4 на указанный механизм. Основа монтажного вагона 20, соответственно тележка вагона, напротив, не должна воспринимать испытательные усилия, так как монтажный вагон 20 зажимается на высоте своей приемной площадки.
На Фиг. 7B показан фрагмент из фиг. 7A в отличающемся выполнении. Согласно Фиг. 7B болт 7 помещен не на продольном несущем элементе 4, а на монтажном вагоне 20. Продольный несущий элемент 4 в этом случае имеет одно подходящее сверленое отверстие, соответственно выемку для этого болта 7. Согласно Фиг. 7B от установки болта на продольном несущем элементе 4 отказываются, если он создает помеху при непосредственном монтаже испытуемого образца 1 на продольном несущем элементе 4.
На Фиг. 8A показан левый зажим 61, который насажен на профиль 6 в форме ласточкина хвоста левого продольного несущего элемента 4 и прикладывает первое зажимное усилие 145 к испытуемому образцу 1, который здесь привинчен винтами 5 к продольным несущим элементам 4. Соответственно, правый зажим 62 насажен на профиль 6 в форме ласточкина хвоста правого продольного несущего элемента 4 и прикладывает второе зажимное усилие 146 к испытуемому образцу 1.
Аналогично этому на Фиг. 8B показан вид сбоку левого зажима 61 и испытуемого образца 1. С помощью зажимов 61, 62 испытуемые образцы 1 тоже можно прочно затягивать на продольных несущих элементах 4, которые могут недостаточно прочно закрепляться посредством указанных винтов 5 или совсем не закрепляться. Преимуществом здесь является то, что испытуемые образцы 1 с необычными габаритами тоже могут быть адаптированы для испытаний.
На Фиг. 9 показан вид сверху испытательного стенда 2 со сдвоенным приемным устройством, состоящим из салазок 30, которые установлены на интерфейсе 100 испытательного стенда. На этих салазках 30 смонтированы два приемных устройства для стрелочного привода, каждое из которых состоит из двух индивидуально регулируемых продольных несущих элементов 4. На каждом из приемных устройств в качестве испытуемого образца 1 смонтирован стрелочный привод. Подвижная область 37 может двигаться в стороны вдоль интерфейса 100 испытательного стенда, за счет чего и правый испытуемый образец 1 может перемещаться в испытательную позицию перед генератором 14 усилий испытательного стенда 2. В показанной на Фиг. 9 позиции левый испытуемый образец 1 проверяется в то время, когда правый испытуемый образец 1 может быть заменен. При этом посредством регулируемого продольного несущего элемента 4 на правой стороне может осуществляться адаптивное управление следующим стрелочным приводом.
Таким образом, предоставляются два гибких приемных устройства согласно предыдущим примерам выполнения, причем оба приемных устройства смонтированы на общих салазках 30, установленных с возможностью горизонтального перемещения. За счет этого следующий испытуемый образец 1 уже может подвергаться адаптации, пока текущий испытуемый образец 1 еще находится в испытательной позиции на одной линии со стационарным генератором 14 усилий.
За счет размещения второго приемного устройства параллельно первому на общих подвижных в горизонтальном направлении салазках 30 оба приемных устройства могут быть быстро заменены до генерирования 14 усилий нагрузки. На каждом из приемных устройств, которое в данном случае не находится перед генератором 14 усилий, испытуемый образец может быть заменен, не создавая препятствий для испытания другого испытуемого образца. Позиция адаптивного управления находится попеременно то слева, то справа от испытательной позиции. Изменение позиции может осуществляться вручную или автоматически.
На Фиг. 10 показано сдвоенное приемное устройство по фиг. 9, согласно которой испытуемый образец 1, замененный на правой стороне подвижной области, вместе с салазками 30 был перемещен перед генератор 14 усилий на испытательном стенде 2. Более того, испытательная позиция находится, следовательно, на правой стороне, тогда как в позиции адаптивного управления на левой стороне может быть смонтирован новый испытуемый образец 1.
На Фиг. 11 представлен вид сбоку указанного сдвоенного приемного устройства. Салазки 30 посредством одной или нескольких горизонтальных направляющих 33 соединены с интерфейсом 100 испытательного стенда. Эти горизонтальные направляющие 33 должны выдерживать испытательные усилия, которые уже были описаны в связи с Фиг. 6. Салазки 30 посредством ходовой тележки 34 опираются на основание. При этом салазки 30 установлены, например, на роликах, колесах или на шину, которые могут служить дополнительной направляющей для горизонтального движения.
На Фиг. 12 показан пример осуществления сдвоенного приемного устройства по фиг. 9-11, причем оба приемных устройства отделены защитной стенкой 35 для защиты оператора в соответствии с требованиями техники безопасности.
На Фиг. 13 показан альтернативный пример осуществления, при котором над испытательной позицией опускается защитный колпак 36. Оба примера выполнения служат для того, чтобы исключить для оператора риск механического повреждения на позиции адаптивного управления.
На Фиг. 14 показан еще один пример осуществления сдвоенного приемного устройства по фиг. 9-11, на котором очень большой испытуемый образец 1 смонтирован сразу на обоих приемных устройствах, на трех их продольных несущих элементах 4. Это гарантирует, что даже очень большие испытуемые образцы 1 будут удерживаться и адаптироваться к испытательному стенду 2.
На Фиг. 15 показан вид сверху адаптационного вагона 22 с двумя продольными несущими элементами 4, которые могут гибко регулироваться посредством показанного на Фиг. 5 механизма или подобного механизма, чтобы приспособить адаптационный вагон 22 под индивидуальные габариты испытуемого образца 1, который устанавливается на продольных несущих элементах 4. Адаптационный вагон 22 содержит также интерфейс 101 вагона, посредством которого этот адаптационный вагон 22 может быть подключен к испытательному стенду или к станции адаптивного управления.
Фиг. 15 иллюстрирует возможность установки приемного устройства на отдельном адаптационном вагоне 22. При этом целесообразно снабдить интерфейс 101 вагона не только местом механического подключения, но и местом электрического подключения, автоматически контактирующим с указанным механизмом.
Адаптационный вагон 22 во время адаптации испытуемого образца 1 к показанной на Фиг. 18 станции 21 адаптивного управления необходимо лишь снабжать током, чтобы можно было устанавливать указанные позиции продольных несущих элементов 4. Так как эти позиции механически зафиксированы, то они тоже остаются без электроснабжения. Если исполнительные приводы расположены в адаптационном вагоне 22, то станция 21 адаптивного управления содержит остальную силовую электронику. В порядке альтернативы и сами исполнительные приводы могут быть размещены на станции 21 адаптивного управления, так что необходимые движения через подключаемые валы передаются чисто механически на указанные четыре оси механизма адаптационного вагона 22. Адаптационный вагон 22 в этом случае является чисто пассивным и, соответственно, легче и экономичнее в изготовлении.
Адаптационный вагон 22 может продольными несущими элементами 4 захватывать также простой монтажный вагон, на котором смонтирован испытуемый образец 1.
На Фиг. 16 показан адаптационный вагон 22 по фиг. 15, причем он пристыкован к испытательному стенду 2. При этом между интерфейсом 101 вагона и интерфейсом 100 испытательного стенда посредством одного или нескольких соединений 40 обеспечивается быстро создаваемое и быстро разъединяемое механическое сцепление, которое в состоянии воспринимать испытательные усилия на испытательном стенде 2.
Адаптационный вагон 22, аналогично предыдущим примерам выполнения, содержит оси адаптивного управления, показанные, например, как элементы механизма 3 на Фиг. 5. Посредством этих осей адаптивного управления продольные несущие элементы 4 адаптационного вагона 22 устанавливаются подходящим образом, чтобы обеспечить высокоточную ориентацию испытуемого образца 1 относительно генератора 14 усилий на испытательном стенде 2.
На Фиг. 17 показан укрупненный вид сверху интерфейса 101 вагона, который выполнен с возможностью создания механического и электрического соединения с интерфейсом 100 испытательного стенда. Для этого адаптационный вагон сначала перемещают вдоль первого вектора 44 движения. Затем адаптационный вагон движется вдоль второго вектора 45 движения, после чего фиксирующие болты 41 интерфейса 100 испытательного стенда выдвигаются вдоль третьего вектора 45 движения и механически фиксируют адаптационный вагон в интерфейсе 100 испытательного стенда. Такое соединение является очень прочным, так что оно может воспринимать испытательные усилия 141. При создании этого соединения электрический штекер 42 на интерфейсе 101 вагона автоматически вставляется в электрическую втулку 43 интерфейса 100 испытательного стенда. Благодаря этому обеспечивается электрический контакт с адаптационным вагоном, а также - опосредованно - с установленным на адаптационном вагоне испытуемым образцом.
Такое универсальное соединение втулка-штекер создается автоматически при стыковке адаптационного вагона с испытательным стендом или со станцией адаптивного управления. В порядке альтернативы для электрического подключения адаптационного вагона может вручную вставляться отдельный соединительный кабель. Для обеспечения электрического контакта с испытуемым образцом, установленным на адаптационном вагоне, сначала имеющийся на испытуемом образце специальный кабель вставляется в адаптационный вагон, который в свою очередь через унифицированное, показанное на Фиг. 17 соединение втулка-штекер автоматически подключается к испытательному стенду или к станции адаптивного управления.
Такое электрическое соединение между испытательным стендом и адаптационным вагоном может быть использовано для того, чтобы можно было перемещать стрелочный привод в ходе испытаний посредством продольных несущих элементов 4.
Вместо интерфейса 100 испытательного стенда на станции адаптивного управления может быть дополнительно предусмотрен интерфейс подобного рода, к которому подключен адаптационный вагон.
На Фиг. 18 показана такая станция 21 адаптивного управления, к которой адаптационный вагон 22 пристыкован своим интерфейсом 101 вагона, вид сбоку. Адаптационный вагон 22 может на станции 21 адаптивного управления настраиваться на соответствующий испытуемый образец 1 автоматически или вручную. В случае автоматической настройки станция 21 адаптивного управления подает электрическое питание и управляющие сигналы на оси механизма адаптационного вагона 22 для управления обоими продольными несущими элементами 4. При этом адаптационный вагон 22 может продольными несущими элементами 4 захватывать также простой монтажный вагон, на котором смонтирован испытуемый образец 1. Сам адаптационный вагон 22 установлен, например, на поворачивающихся на 360° колесах или на шариках.
Хотя данное изобретение и было подробно пояснено и проиллюстрировано на примерах выполнения, оно этими раскрытыми примерами не ограничивается, и на его основе специалистом могут быть выведены другие варианты, не выходящие, однако, за объем защиты данного изобретения. Описанные примеры выполнения, варианты, формы осуществления и модификации могут свободно комбинироваться друг с другом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания электроприводов стрелочных переводов | 2020 |
|
RU2750306C1 |
| УСТРОЙСТВО, ИСПЫТАТЕЛЬНЫЙ СТЕНД И СПОСОБ ИСПЫТАНИЙ СТРЕЛОЧНОГО ПРИВОДА | 2015 |
|
RU2666047C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛАСТОМЕРНЫХ ПОГЛОЩАЮЩИХ АППАРАТОВ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2018 |
|
RU2684872C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ СОЧЛЕНЕНИЙ РУКАВОВ ВТУЛКИ С КОРПУСОМ ВТУЛКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2022 |
|
RU2795551C1 |
| Способы проведения испытаний вагонов и испытательный комплекс для их осуществления | 2017 |
|
RU2698605C2 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ СЕТОК И СЕТОЧНЫХ ПАНЕЛЕЙ НА РАСТЯЖЕНИЕ ВО ВСЕХ НАПРАВЛЕНИЯХ СЕТОЧНОГО ПЛЕТЕНИЯ | 2020 |
|
RU2742596C1 |
| Стенд для статических и циклических испытаний кольцеобразных образцов труб | 2024 |
|
RU2833488C1 |
| СТЕНД ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ НА КОЛЕЕОБРАЗОВАНИЕ ДОРОЖНЫХ КОМПОЗИЦИОННЫХ СМЕСЕЙ | 2017 |
|
RU2642978C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ КРЕСТОВИНЫ СТРЕЛКИ | 2004 |
|
RU2351498C2 |










Изобретение относится к устройствам испытания стрелочных приводов. Установка включает в себя приемное устройство, содержащее два несущих элемента, которые выполнены с возможностью размещения стрелочного привода в качестве испытуемого образца или размещения монтажного вагона, на котором смонтирован стрелочный привод, и механизм, который выполнен с возможностью перемещения несущих элементов как в горизонтальном, так и в вертикальном направлении, испытательный стенд, содержащий генератор усилий, который выполнен с возможностью приложения силы противодействия к испытуемому образцу во время выполнения испытуемым образцом на испытательном стенде процессов регулирования. Причем испытательный стенд выполнен с возможностью регулировки и/или проверки усилий, вырабатываемых испытуемым образцом, генератор усилий и механизм выполнены механически и электрически независимыми друг от друга, с обеспечением перемещения несущих элементов без воздействия на испытательный стенд или генератор усилий, заданное положение соединения между испытуемым образцом и генератором усилий является регулируемым. Достигается повышение надежности проверки стрелочных приводов. 5 н. и 25 з.п. ф-лы, 18 ил.
1. Установка для испытания стрелочных приводов, включающая в себя
- по меньшей мере одно приемное устройство, содержащее
- по меньшей мере два несущих элемента (4), которые выполнены с возможностью размещения стрелочного привода в качестве испытуемого образца (1) или размещения монтажного вагона (20), на котором смонтирован стрелочный привод в качестве испытуемого образца (1), и
- механизм (3), который выполнен с возможностью перемещения несущих элементов (4) как в горизонтальном, так и в вертикальном направлении,
- испытательный стенд (2), содержащий генератор (14) усилий, который выполнен с возможностью приложения силы противодействия к испытуемому образцу (1) во время выполнения испытуемым образцом (1) на испытательном стенде (2) процессов регулирования, причем испытательный стенд (2) выполнен с возможностью регулировки и/или проверки усилий, вырабатываемых испытуемым образцом (1), причем
- генератор (14) усилий и механизм (3) выполнены механически и электрически независимыми друг от друга, с обеспечением перемещения несущих элементов (4) без воздействия на испытательный стенд (2) или генератор (14) усилий, причем заданное положение соединения между испытуемым образцом (1) и генератором (14) усилий является регулируемым.
2. Установка по п. 1, в которой механизм (3) выполнен с возможностью регулирования горизонтального расстояния между несущими элементами (4).
3. Установка по п. 1 или 2, в которой механизм (3) выполнен с возможностью перемещения несущих элементов (4) как в горизонтальном, так и в вертикальном направлении независимо друг от друга.
4. Установка по любому из предыдущих пунктов, в которой механизм (3) для перемещения несущих элементов (4) в горизонтальном и вертикальном направлении содержит горизонтальные и вертикальные линейные направляющие, в частности линейные подшипники скольжения, направляющие в форме ласточкина хвоста, профилированные направляющие шины или систему из двух направляющих шин и сепаратора с телами качения между ними.
5. Установка по любому из предыдущих пунктов, в которой механизм (3) для каждого из несущих элементов (4) снабжен собственным горизонтальным линейным приводом (121, 122) и собственным вертикальным линейным приводом (83, 93), которые выполнены с возможностью автоматизированного перемещения соответствующего несущего элемента (4) в требуемую позицию.
6. Установка по п. 5, в которой механизм (3) выполнен по меньшей мере из двух установленных вертикально крестовых столов и/или установленных вертикально двухкоординатных линейных приводов, на каждом из которых установлен один из несущих элементов (4).
7. Установка по п. 5 или 6, в которой
- каждый несущий элемент (4) установлен на салазках (81, 89) несущего элемента, которые выполнены с возможностью перемещения соответствующим вертикальным линейным приводом (83, 93), и
- каждый вертикальный линейный привод (83, 93) установлен на поперечных салазках (8, 9), которые выполнены с возможностью перемещения соответствующим горизонтальным линейным приводом (121, 122).
8. Установка по любому из пп. 5-7, в которой
- линейные приводы (83, 93, 121, 122) выполнены с возможностью взаимодействия с соответствующими параллельными направляющими (82, 92, 111, 112), которые сконструированы с возможностью направления соответствующих салазок (81, 91, 8, 9), и
- каждый из линейных приводов (83, 93, 121, 122) содержит по одному гидравлическому или электрическому линейному двигателю или линейному актуатору.
9. Установка по любому из пп. 5-8, в которой дополнительно предусмотрена система управления, в которой заданы и сохранены позиции несущих элементов в зависимости от типов испытуемых образцов, причем эта система управления выполнена с возможностью управления линейными приводами (83, 93, 121, 122) для автоматизированного перемещения несущих элементов (4) в указанные позиции для этих несущих элементов.
10. Установка по любому из предыдущих пунктов, в которой
- механизм (3) рассчитан с возможностью захватывания и/или подъема несущими элементами (4) монтажного вагона (20), на котором дополнительно предусмотрено закрепление испытуемого образца (1) посредством болтовых соединений, и
- несущие элементы (4) содержат крепежные элементы, в частности, расположенные с внутренней стороны болты (7), штифты, захваты, углубления или горизонтальные сверленые отверстия, обеспечивающие захватывание монтажного вагона (20), в частности, путем зажимного закрепления монтажного вагона (20) между несущими элементами (4).
11. Установка по любому из предыдущих пунктов, в которой несущие элементы (4) снабжены вертикальными резьбовыми сверлеными отверстиями (52), обеспечивающими крепление испытуемого образца (1) посредством болтовых соединений.
12. Установка по любому из предыдущих пунктов, в которой несущие элементы (4) с внешней стороны содержат крепежные средства, в частности привинченные через горизонтальные резьбовые сверленые отверстия (51) профили (6) в форме ласточкина хвоста, которые выполнены с возможностью крепления дополнительных крепежных элементов для испытуемого образца (1), в частности зажимов (61, 62).
13. Установка по любому из предыдущих пунктов, в которой приемное устройство установлено на самом испытательном стенде (2) или рядом с испытательным стендом (2) на основании.
14. Установка по любому из предыдущих пунктов, в которой испытательный стенд (2) содержит
- интерфейс (100) испытательного стенда, имеющий по меньшей мере одну горизонтальную направляющую (33),
- салазки (30), которые установлены с возможностью перемещения вдоль этой горизонтальной направляющей (33), и
- по меньшей мере два из приемных устройств, которые установлены рядом друг с другом на салазках (30).
15. Установка по п. 14, в которой дополнительно предусмотрена ходовая тележка (34), состоящая, в частности, из роликов, колес или направляющей и поддерживающая салазки (30) на основании.
16. Установка по п. 14 или 15, в которой дополнительно предусмотрена по меньшей мере одна защитная стенка (35), установленная между приемными устройствами на салазках (30), или защитный колпак (36), смонтированный на испытательном стенде (2).
17. Установка по любому из пп. 1-12, в которой дополнительно предусмотрен адаптационный вагон (22), который имеет тележку, на которой смонтировано приемное устройство и в котором эта тележка содержит интерфейс (101) вагона для механического соединения адаптационного вагона (22) с интерфейсом (100) испытательного стенда (2).
18. Установка по п. 17, в которой дополнительно предусмотрена станция (21) адаптивного управления, выполненная с возможностью механического соединения с интерфейсом (101) адаптационного вагона (22) и с возможностью перемещения несущих элементов (4) как в горизонтальном, так и в вертикальном направлении посредством механизма (3).
19. Установка по п. 18, в которой
- механизм (3) для каждого из несущих элементов (4) содержит приводной вал для самотормозящей исполнительной передачи для перемещения соответствующего несущего элемента (4) в направлении х, и
- механизм (3) для каждого из несущих элементов (4) содержит приводной вал для самотормозящей исполнительной передачи для перемещения соответствующего несущего элемента (4) в направлении y, перпендикулярном направлению х.
20. Установка по п. 19, в которой приводные валы имеют по одной механической муфте для передачи вращающего момента, которыми эти приводные валы при механическом соединении адаптационного вагона (22) со станцией (21) адаптивного управления автоматически связаны с исполнительными приводами в этой станции (21) адаптивного управления.
21. Установка по любому из пп. 17-20, в которой интерфейс (101) вагона содержит электрический штекерный соединитель, который при механическом соединении адаптационного вагона (22) с испытательным стендом (2) или со станцией (21) адаптивного управления автоматически введен в электрический штекерный соединитель интерфейса (100) испытательного стенда или станции (21) адаптивного управления.
22. Установка по п. 19 или 21, в которой
- адаптационный вагон (22) для каждого приводного вала имеет исполнительный привод, и
- станция (21) адаптивного управления через электрический штекерный соединитель обеспечивает подачу электрического питания и управляющих сигналов на эти исполнительные приводы для перемещения несущих элементов (4).
23. Установка по любому из предыдущих пунктов, в которой дополнительно предусмотрен монтажный вагон (20), который выполнен с возможностью размещения стрелочного привода и с возможностью фиксации между несущими элементами (4) посредством геометрического замыкания.
24. Способ испытания стрелочного привода, при котором
- с помощью механизма (3) по меньшей мере два несущих элемента (4) перемещаются как в горизонтальном, так и в вертикальном направлении, и
- стрелочный привод в качестве испытуемого образца (1) монтируется на этих несущих элементах (4), или
- механизм (3) несущими элементами (4) захватывает и/или поднимает монтажный вагон (20), на котором закреплен стрелочный привод в качестве испытуемого образца (1),
и при котором
- испытательный стенд (2) посредством генератора (14) усилий прикладывает силу противодействия к испытуемому образцу (1) в то время, когда этот испытуемый образец (1) на испытательном стенде (2) осуществляет процессы регулирования, и при этом усилия, развиваемые этим испытуемым образцом (1), регулируются и/или проверяются, и
- несущие элементы (4) перемещаются перед монтажом испытуемого образца (1) без воздействия на испытательный стенд (2) или генератор (14) усилий, и при этом устанавливается заданное положение соединения между испытуемым образцом (1) и генератором (14) усилий.
25. Способ по п. 24, при котором несущие элементы (4) перемещаются независимо друг от друга как в горизонтальном, так и в вертикальном направлении.
26. Способ по п. 24 или 25, при котором система управления, в которой запрограммированы позиции несущих элементов в зависимости от типов испытуемых образцов, управляет линейными приводами (83, 93, 121, 122) и автоматизированно перемещает несущие элементы (4) в одну из позиций несущих элементов.
27. Способ по любому из пп. 24-26, при котором
- адаптационный вагон (22) стыкуется интерфейсом (101) вагона со станцией (21) адаптивного управления, причем штекерный соединитель интерфейса (101) вагона автоматически вводится в штекерный соединитель станции (21) адаптивного управления, и исполнительные приводы адаптационного вагона (22) снабжаются электропитанием, или
- исполнительные приводы станции (21) адаптивного управления стыкуются с механическими присоединительными элементами интерфейса (101) вагона для передачи вращающего момента,
и при котором
- адаптационный вагон (22) подстраивается под испытуемый образец (1) или монтажный вагон (20) за счет того, что несущие элементы (4) адаптационного вагона (22) с помощью исполнительных приводов адаптационного вагона (22) или исполнительных приводов станции (21) адаптивного управления перемещаются в позиции, подходящие для размещения испытуемого образца (1) или монтажного вагона (20), и
- испытуемый образец (1) устанавливается на адаптационный вагон (20), или монтажный вагон (20) зажимается между несущими элементами (4) с геометрическим замыканием,
и при котором
- адаптационный вагон (20) своим интерфейсом (101) вагона пристыковывается к испытательному стенду (2).
28. Применение установки по любому из пп. 1-23 для регулирования заданного положения соединения между испытуемым образцом (1) и генератором (14) усилий на испытательном стенде (2).
29. Применение приемного устройства установки по любому из пп. 1-23 для захватывания и/или подъема монтажного вагона (20), на котором установлен испытуемый образец (1).
30. Применение установки по любому из пп. 1-23 для регулировки и/или проверки усилий, развиваемых стрелочным приводом в качестве испытуемого образца (1).
| DE 202008002439 U1, 28.08.2008 | |||
| DE 102012211377 A1, 02.01.2014 | |||
| DE 102009020182 A1, 11.11.2010 | |||
| Приспособление к крутильным ватерам для останова подачи нити при ее обрыве | 1925 |
|
SU3037A1 |

