Изобретение относится к медицине и может быть использовано в травматологии, ортопедии и неврологии при реабилитации больных после травм и поражений опорно-двигательного аппарата различного генезиса.
Известен способ реабилитации функциональных нарушений опорно-двигательного аппарата [Руководство по протезированию. Под редакцией Н.И. Кондрашина. М.: Медицина, 1988, с. 277-308], заключающийся в том, что при наличии способности у пациента к самостоятельному двигательному акту проводится электростимуляция мышц одновременно с совершением пациентом двигательного акта. Для проведения электростимуляции мышц применяют электроды, а именно пару электродов; самостоятельным двигательным актом, совершаемым пациентом при электростимуляции мышц, является ходьба; амплитуда стимулирующего импульса составляет до 60 В, длительность стимулирующих импульсов варьируется от 20 мкс до 200 мкс, а частота следования стимулирующих импульсов 40-80 Гц.
К недостаткам относится отсутствие системности локомоторного цикла, что не способствует выработке правильных двигательных стереотипов, к этому же приводит и ограничение в количестве движений. В результате удлиняются сроки реабилитации, снижается ее эффективность, не всегда достигается положительный результат. До появления способности у пациента самостоятельно совершать двигательный акт, т.е. ходить, могут развиться контрактуры различного характера (мышечные, суставные), ограничивающие дальнейшую реабилитацию или делающие ее практически невозможной.
Известен также способ лечения заболеваний и последствий повреждений опорно-двигательного аппарата [RU 2098149 C1, A61N 1/32, 6 А61В 17/56, 10.12.1997], заключающийся в многоканальной электрической стимуляции мышц при ходьбе путем наложения пары электродов (активного и индифферентного) на группы мышц и задания параметров электростимуляции с фазами шага с помощью датчиков углов, расположенных в области коленного или тазобедренного сустава. При этом электроды накладывают на основную и вспомогательную группы мышц, длительность электростимуляции на первом сеансе составляет 20 мин, а с 5-6 сеанса его продолжительность доводят до 60 мин, затем увеличивают амплитуду напряжения с 30 до 60 В длительность импульсов с 20 до 200 мкс и частоту следования от 30 до 60 Гц. Электростимуляцию осуществляют путем подачи электрического импульса в фазах естественного возбуждения и ретракции мышц, при этом размер электрода выбирают равным поперечнику стимулируемой мышцы или группы мышц, а сам электрод располагают перпендикулярно ходу мышечных волокон.
Данный способ обладает следующими недостатками: необходимо наличие способности пациента стоять и ходить, что сразу ограничивает круг реабилитируемых, так как часто эта способность появляется достаточно поздно от начала заболевания или совсем не появляется, в связи с чем, реальное эффективное время для физиологического восстановления будет упущено. Более того, за этот промежуток времени, до появления способности у пациента самостоятельно совершать двигательный акт, могут развиться контрактуры различного характера, исключающие возможность реабилитации практически для всех категорий больных с патологиями опорно-двигательного аппарата.
К недостаткам также относится отсутствие системности локомоторного цикла, ограничение в количестве движений, что мешает качественной и интенсивной наработке правильных двигательных стереотипов.
Кроме того, известен способ реабилитации функциональных нарушений опорно-двигательного аппарата [RU 2126276 С1, A61N 1/18, 20.02.1999], заключающийся в электростимуляции мышц при ходьбе за счет установки пары электродов, причем в нем электростимуляцию мышц проводят в фазах естественного возбуждения и сокращения мышц, осуществляя синхронизацию электростимуляции мышц с фазами шага. Дополнительно осуществляют корригирующее, разгружающее, фиксирующее, повышающее опороспособность воздействие на пораженный отдел опорно-двигательного аппарата путем установки на пациента жесткого ортеза.
Этому способу присущи те же недостатки. Необходимо наличие способности пациента стоять и ходить, что сразу ограничивает круг реабилитируемых, так как в большинстве случаев эта способность может появиться очень поздно или совсем не появиться, в связи с чем реальное эффективное время для физиологического восстановления будет упущено. Более того, за этот промежуток времени, до появления способности у пациента самостоятельно совершать двигательный акт, могут развиться контрактуры различного характера, ограничивающие дальнейшую реабилитацию или делающие ее практически невозможной. К недостаткам также относится отсутствие системности локомоторного цикла, ограничение в количестве движений, что мешает качественной и интенсивной наработке правильных двигательных стереотипов.
Наиболее близким по технической сущности к предложенному является способ реабилитации функциональных нарушений опорно-двигательного аппарата [RU 2235566 С2, A61N 1/16, 10.09.2004]. Он заключается в том, что при наличии способности у пациента к самостоятельному двигательному акту, проводится электростимуляция мышц одновременно с совершением пациентом двигательного акта. Электростимуляцию мышц проводят в фазах естественного возбуждения и сокращения мышц, при этом осуществляют синхронизацию электростимуляции мышц с фазами двигательного акта, совершаемого пациентом. Синхронизацию осуществляют с помощью угловых датчиков, для проведения электростимуляции мышц применяют электроды, а двигательным актом, совершаемым пациентом при электростимуляции мышц, служит многократно повторяемое системное движение по заданной траектории.
Особенностью наиболее близкого технического решения является то, что в качестве источника многократно повторяемого системного движения по заданной траектории используют тренажер. По мере формирования двигательных стереотипов и восстановления нервно-мышечного аппарата осуществляют повышение объема физической нагрузки увеличением количества повторяемых системных движений по траектории, заданной тренажером. При более продолжительном сеансе электростимуляции, в качестве тренажера используют или велотренажер, или имитатор ходьбы с эллипсоидной характеристикой движения опорных педалей, или имитатор ходьбы по лестнице. Кроме того, угловые датчики устанавливают на осях вращения элементов тренажера. Применяют от одной до нескольких пар электродов, соответствующих поперечному размеру стимулируемой мышцы и располагаемых перпендикулярно ходу мышечных волокон, которые накладывают на определенные группы мышц в зависимости от характера поражения. В начале цикла реабилитации продолжительность сеанса электростимуляции мышц составляет 30-40 мин, а затем продолжительность сеанса электростимуляции мышц доводят до 60-90 мин. При состояниях пациента, не сопровождающихся нарушением нервно-мышечной проводимости, амплитуда стимулирующего импульса составляет 30-80 В, длительность стимулирующих импульсов 20-200 мкс, частота следования стимулирующих импульсов 25-150 Гц, а при состояниях пациента, сопровождающихся нарушением нервно-мышечной проводимости, амплитуда стимулирующего импульса составляет 30-80 В, длительность стимулирующих импульсов варьируется от 20-200 мкс, частота следования стимулирующих импульсов составляет 25-150 Гц.
Недостатком наиболее близкого технического решения является относительно низкая эффективность реабилитации, вызванная тем, что в большом числе случаев у пациента одна из конечностей (например, нога) является здоровой, но для реабилитации второй конечности используется не информация о движении здоровой ноги, а многократно повторяемое системное движение по заданной траектории, источником которого является тренажер. Это снижает эффективность реабилитации и увеличивает ее сроки.
Задачей, которая решается в предложенном изобретении, является создание способа, позволяющего более эффективно проводить реабилитацию и сокращать ее сроки.
Требуемый технический результат заключается в повышении эффективности и сокращение сроков реабилитации.
Поставленная задача решается, а требуемый технический результат достигается тем, что в способе, основанном на том, что проводят синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной ноге, а синхронизацию электростимуляции мышц больной ноги с фазами двигательного акта осуществляют в соответствии с системным движением по заданной траектории, согласно изобретению в качестве системного движения по заданной траектории принимают траекторию движения здоровой ноги, фиксируемую размещенными на ней угловыми датчиками движения, при этом движение по заданной траектории корректируют на каждом шаге пациента с учетом фиксируемого пространственного положения больной ноги с помощью установленных на ней датчиков пространственного положения больной ноги.
На чертеже представлены:
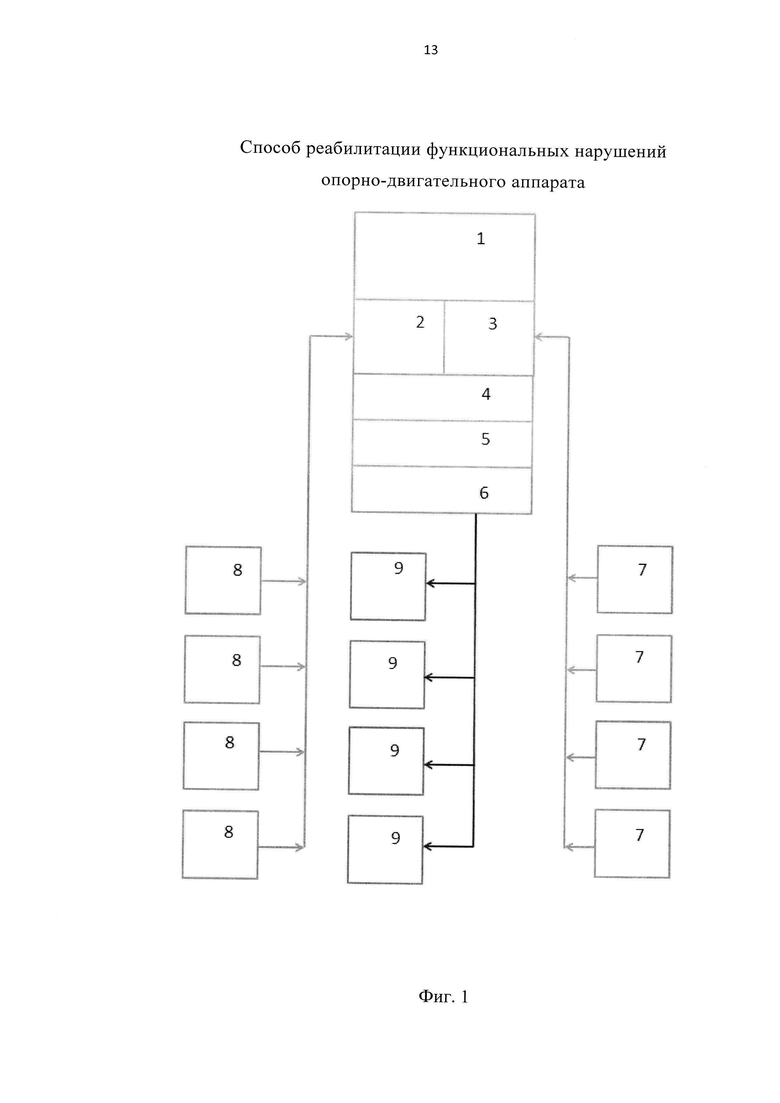
на фиг. 1 - структурная схема системы, которая может быть использована для реализации предложенного способа реабилитации функциональных нарушений опорно-двигательного аппарата;
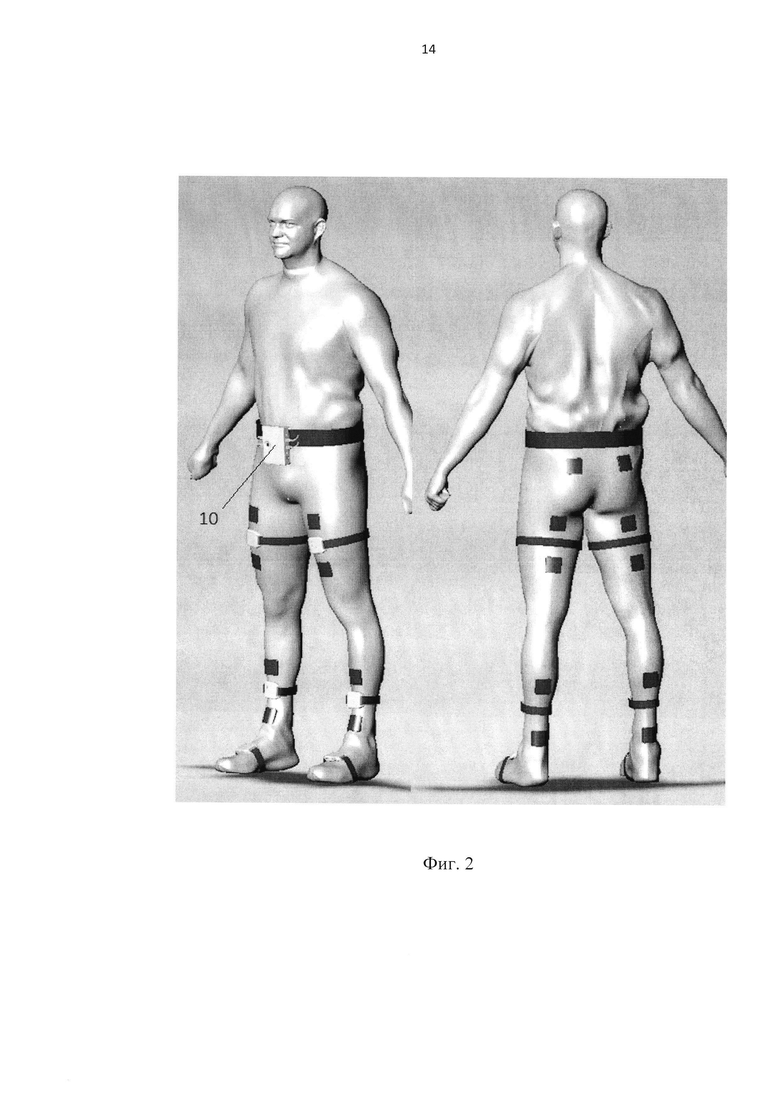
на фиг. 2 - пример размещения автономного устройства на поясе пациента, на теле которого установлены датчики и электроды.
Система содержит блок 1 управления движением и миостимуляцией, модуль 2 контроля положения больной ноги, модуль 3 контроля положения здоровой ноги, модуль 4 вычисления рассогласований, модуль 5 формирования сигналов коррекции параметров миостимуляции, модуль 6 выработки импульсов миостимуляции, набор 7 датчиков движения, устанавливаемых на здоровую ногу, набор 8 датчиков движения, устанавливаемых на больную ногу, также набор 9 электродов для миостимуляции, устанавливаемых на больную ногу.
В системе блок 1 управления движением и миостимуляцией, модуль 2 контроля положения больной ноги, модуль 3 контроля положения здоровой ноги, модуль 4 вычисления рассогласований, модуль 5 формирования сигналов коррекции параметров миостимуляции и модуль 6 выработки импульсов миостимуляции могут быть выполнены в виде автономного устройства 10, размещаемого, например, на поясе пациента и использоваться пациентом для тренировок вне лечебного учреждения. Т.е. пациент может ходить по улице, проходить отмеренные дистанции и т.п. с использованием реального рельефа местности. Связь с датчиками и электродами может производится по проводам или радиоканалам.
Система может транслировать сигналы лечащему врачу удаленно, что обеспечивает наблюдение за ходом тренировок и, при необходимости, корректировку тренировочного задания.
Предложенный способ реабилитации функциональных нарушений опорно-двигательного аппарата реализуется следующим образом.
Разберем его реализацию на примере работы описанной системы реабилитации ноги, утратившей функцию нормального движения.
Нулевое положение системы отсчитывается от момента, когда пациент стоит и обе его ноги расположены рядом в вертикальном положении.
Работа системы начинается в момент первого шага здоровой ноги. При этом датчики движения 7 фиксируют изменение положения скелетных звеньев ноги (стопа, голень, бедро, таз). Измеренные положения по проводам (на схеме не показаны), либо путем беспроводной передачи поступают в модуль 3 контроля положения здоровой ноги, преобразуются в удобный для дальнейшей обработки вид и сохраняются.
После фиксации системой удара стопы здоровой ноги о землю заканчивается «передний шаг» здоровой ноги, модуль 6 выработки импульсов миостимуляции направляет серию электрических импульсов по проводам (на схеме не показаны) на электроды 9. Для первого шага используется последовательность импульсов, заранее записанных в системе. В результате действия электрических импульсов на мышцы происходит несколько актов их сокращения и расслабления, что выражается в сгибании и разгибании скелетных звеньев больной ноги, которая совершает первый «одиночный шаг».
В течение времени первого шага датчики 7 и 8 движения фиксируют положение скелетных звеньев как здоровой, так и больной ноги. Результаты этих измерений записываются блоком 1 управления движением и миостимуляцией. В этих записях программное обеспечение блока вычленяет отрезки, соответствующие полному циклу «одиночного шага» каждой ноги.
Количество измеренных значений внутри каждого «одиночного шага» равно частоте измерений датчиков движения.
В момент появления в системе первых полных данных о положении скелетных звеньев обеих ног в течение «одиночного шага» каждой из ног, эти данные передаются в модуль 4 вычисления рассогласований.
Первоначально оба графика измерения положений скелетных звеньев синхронизируются. Это означает, что начало «одиночного шага» одной и другой ног совмещается, при этом исключается смещение во времени, обусловленное разностью фаз их движения.
Затем вычисляется рассогласование величин перемещения скелетных звеньев больной ноги по отношению к здоровой в одинаковые моменты синхронизированных графиков движения. При этом количество положений, для которых вычисляется рассогласование, не обязательно совпадает с количеством точек измерения датчиками движения, а, как правило, усредняется по нескольким смежным точкам. В результате получаются графики рассогласования перемещений для каждого скелетного звена, на котором установлен датчик перемещений.
По мере получения данных о рассогласовании перемещений, они передаются в модуль 5 формирования сигнала коррекции параметров миостимуляции. В нем производится перерасчет величин и времени выработки электрических импульсов, которые должны быть направлены на электроды системы. Это изменение производятся в направлении получения таких параметров миостимуляции, которые бы обеспечили уменьшение рассогласования в положении скелетных звеньев больной и здоровой ног.
Сформированные в модуле 5 сигналы коррекции передаются в модуль 6 выработки импульсов миостимуляции. где вырабатываются соответствующие импульсы миостимуляции. но уже с измененным режимом, по сравнению с предыдущим шагом.
Электрические импульсы достигают мышц, что приводит к их сокращениям и расслаблениям в новом ритме и с изменившимися усилиями и амплитудами. Эти процессы в мышцах приводят к сгибанию и разгибанию скелетных звеньев, приводящих к следующему шагу больной ногой.
При этом непрерывно ведется регистрация изменений положения скелетных звеньев, соответствующие данные непрерывно передаются в блок 1 управления миостимуляцией.
Таким образом, каждый шаг здоровой ноги является эталоном (паттерном) для совершения следующего шага больной ногой, причем система миостимуляции воздействует на больную ногу таким образом, чтобы ее движения максимально приближались к движениям здоровой.
Может быть задана точность соответствия движений больной и здоровой ног. Когда рассогласование будет укладываться в этот допустимый диапазон, изменение параметров миостимуляции прекратится. В это время система будет воспроизводить достигнутый паттерн ходьбы до тех пор, пока рассогласование снова не выйдет за допустимые пределы.
Особенностью примененного метода является его физиологичность: в случае если предписанный врачом темп ходьбы оказался для больного чрезмерным, либо он устал, либо рельеф местности стал повышаться и пр., больной снижает темп передвижения или, например, уменьшает длину шага здоровой ноги, что немедленно отражается на движениях больной ноги, т.е. на всем режиме ходьбы.
В конце тренировки параметры миостимуляции шага больной ноги сохраняются в системе и служат параметрами первого шага больной ногой на следующей тренировке.
Таким образом, благодаря использованию предложенного способа обеспечивается достижение требуемого технического результата, который заключается в повышении эффективности и сокращении сроков реабилитации, поскольку каждый шаг здоровой ноги является эталоном (паттерном) для совершения следующего шага больной ногой, причем обеспечивается воздействие на больную ногу таким образом, чтобы ее движения максимально приближались к движениям здоровой.
Кроме того, если в силу сложности заболевания восстановление функции самостоятельной ходьбы, управляемой мозгом, не происходит, то предложенный способ система все равно будет позволять пациенту производить ходьбу. В этом случае больная нога будет выполнять функции биопротеза, оставаясь собственной конечностью пациента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реабилитации функциональных нарушений опорно-двигательного аппарата при гемипарезе | 2019 |
|
RU2734406C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2002 |
|
RU2235566C2 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПОСЛЕ ТРАВМ И ПОРАЖЕНИЙ ГРУДНОГО И ПОЯСНИЧНОГО ОТДЕЛОВ ПОЗВОНОЧНИКА | 2017 |
|
RU2650210C1 |
| Способ восстановления функции ходьбы и равновесия в остром периоде ишемического инсульта | 2022 |
|
RU2797372C1 |
| СПОСОБ КОРРЕКЦИИ ДВИЖЕНИЙ ПРИ ХОДЬБЕ В РАЗНОМ ТЕМПЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2082452C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ В РАННЕМ ВОССТАНОВИТЕЛЬНОМ ПЕРИОДЕ ЦЕРЕБРАЛЬНОГО ИНСУЛЬТА | 2012 |
|
RU2513418C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2126276C1 |
| СПОСОБ ЛЕЧЕНИЯ ДИАБЕТИЧЕСКИХ АНГИОПАТИЙ НИЖНИХ КОНЕЧНОСТЕЙ | 2017 |
|
RU2644292C1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТСКОГО ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА В ФОРМЕ СПАСТИЧЕСКОЙ ДИПЛЕГИИ В ПОЗДНЕЙ РЕЗИДУАЛЬНОЙ СТАДИИ | 2013 |
|
RU2547086C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У БОЛЬНЫХ С НАРУШЕНИЕМ ПРОВОДИМОСТИ ПО СПИННОМУ МОЗГУ | 2003 |
|
RU2236264C1 |
Изобретение относится к медицине, а именно к травматологии, ортопедии и неврологии, и может быть использовано при реабилитации функциональных нарушений опорно-двигательного аппарата. Проводят синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента в фазах их естественного возбуждения и сокращения. Для электростимуляции используют электроды, установленные на больной ноге. Синхронизацию электростимуляции мышц больной ноги с фазами двигательного акта осуществляют в соответствии с системным движением по заданной траектории. В качестве системного движения по заданной траектории принимают траекторию движения здоровой ноги, фиксируемую размещенными на ней угловыми датчиками движения. Движение больной ноги по заданной траектории корректируют на каждом шаге пациента с учетом фиксируемого пространственного положения больной ноги с помощью установленных на ней датчиков движения. Способ обеспечивает повышение эффективности реабилитации, сокращение ее сроков за счет использования шага здоровой ноги в качестве эталонного паттерна для шага больной ноги. 2 ил.
Способ реабилитации функциональных нарушений опорно-двигательного аппарата, основанный на том, что проводят синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной ноге, а синхронизацию электростимуляции мышц больной ноги с фазами двигательного акта осуществляют в соответствии с системным движением по заданной траектории, отличающийся тем, что в качестве системного движения по заданной траектории принимают траекторию движения здоровой ноги, фиксируемую размещенными на ней угловыми датчиками движения, при этом движение больной ноги по заданной траектории корректируют на каждом шаге пациента с учетом фиксируемого пространственного положения больной ноги с помощью установленных на ней датчиков движения.
| СПОСОБ РЕАБИЛИТАЦИИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2002 |
|
RU2235566C2 |
| СПОСОБ УКРЕПЛЕНИЯ МЫШЦ ПОРАЖЕННОЙ НИЖНЕЙ КОНЕЧНОСТИ И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2088273C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ И ПОСЛЕДСТВИЙ ПОВРЕЖДЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2098149C1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТСКОГО ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА В ФОРМЕ СПАСТИЧЕСКОЙ ДИПЛЕГИИ В ПОЗДНЕЙ РЕЗИДУАЛЬНОЙ СТАДИИ | 2013 |
|
RU2547086C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2126276C1 |
| WO 2011055282 A1, 12.05.2011 | |||
| БАРБАЕВА С.Н | |||
| и др | |||
| Функциональная программируемая электростимуляция в реабилитации больных детским церебральным параличом | |||
| Перспективы развития санаторно-курортной помощи и реабилитации в Сибирском регионе | |||
| С-Пб., 2012, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |

