Изобретение относится к медицине и может быть использовано в травматологии, ортопедии и неврологии при реабилитации больных при гемипарезе.
Известен способ реабилитации функциональных нарушений опорно-двигательного аппарата [Руководство по протезированию. Под редакцией Н.И. Кондрашина. М.: Медицина, 1988, с. 277-308], заключающийся в том, что при наличии способности у пациента к самостоятельному двигательному акту проводится электростимуляция мышц одновременно с совершением пациентом двигательного акта. Для проведения электростимуляции мышц применяют электроды, а именно пару электродов; самостоятельным двигательным актом, совершаемым пациентом при электростимуляции мышц, является ходьба; амплитуда стимулирующего импульса составляет до 60 В, длительность стимулирующих импульсов варьируется от 20 мкс до 200 мкс, а частота следования стимулирующих импульсов 40-80 Гц.
К недостаткам относится отсутствие системности локомоторного цикла, что не способствует выработке правильных двигательных стереотипов, к этому же приводит и ограничение в количестве движений. В результате удлиняются сроки реабилитации, снижается ее эффективность, не всегда достигается положительный результат. До появления способности у пациента самостоятельно совершать двигательный акт, т.е. ходить, могут развиться контрактуры различного характера (мышечные, суставные), ограничивающие дальнейшую реабилитацию или делающие ее практически невозможной.
Известен также способ лечения заболеваний и последствий повреждений опорно-двигательного аппарата [RU 2098149 C1, A61N 1/32, 6 А61В 17/56, 10.12.1997], заключающийся в многоканальной электрической стимуляции мышц при ходьбе путем наложения пары электродов (активного и индифферентного) на группы мышц и задания параметров электростимуляции с фазами шага с помощью датчиков углов, расположенных в области коленного или тазобедренного сустава. При этом электроды накладывают на основную и вспомогательную группы мышц, длительность электростимуляции на первом сеансе составляет 20 мин, а с 5-6 сеанса его продолжительность доводят до 60 мин, затем увеличивают амплитуду напряжения с 30 до 60 В длительность импульсов с 20 до 200 мкс и частоту следования от 30 до 60 Гц. Электростимуляцию осуществляют путем подачи электрического импульса в фазах естественного возбуждения и ретракции мышц, при этом размер электрода выбирают равным поперечнику стимулируемой мышцы или группы мышц, а сам электрод располагают перпендикулярно ходу мышечных волокон.
Данный способ обладает следующими недостатками: необходимо наличие способности пациента стоять и ходить, что сразу ограничивает круг реабилитируемых, так как часто эта способность появляется достаточно поздно от начала заболевания или совсем не появляется, в связи с чем, реальное эффективное время для физиологического восстановления будет упущено. Более того, за этот промежуток времени, до появления способности у пациента самостоятельно совершать двигательный акт, могут развиться контрактуры различного характера, исключающие возможность реабилитации практически для всех категорий больных с патологиями опорно-двигательного аппарата.
К недостаткам также относится отсутствие системности локомоторного цикла, ограничение в количестве движений, что мешает качественной и интенсивной наработке правильных двигательных стереотипов.
Кроме того, известен способ реабилитации функциональных нарушений опорно-двигательного аппарата [RU 2126276 C1, A61N 1/18, 20.02.1999], заключающийся в электростимуляции мышц при ходьбе за счет установки пары электродов, причем в нем электростимуляцию мышц проводят в фазах естественного возбуждения и сокращения мышц, осуществляя синхронизацию электростимуляции мышц с фазами шага. Дополнительно осуществляют корригирующее, разгружающее, фиксирующее, повышающее опороспособность воздействие на пораженный отдел опорно-двигательного аппарата путем установки на пациента жесткого ортеза.
Этому способу присущи те же недостатки. Необходимо наличие способности пациента стоять и ходить, что сразу ограничивает круг реабилитируемых, так как в большинстве случаев эта способность может появиться очень поздно или совсем не появиться, в связи с чем реальное эффективное время для физиологического восстановления будет упущено. Более того, за этот промежуток времени, до появления способности у пациента самостоятельно совершать двигательный акт, могут развиться контрактуры различного характера, ограничивающие дальнейшую реабилитацию или делающие ее практически невозможной. К недостаткам также относится отсутствие системности локомоторного цикла, ограничение в количестве движений, что мешает качественной и интенсивной наработке правильных двигательных стереотипов.
К известным относится способ реабилитации функциональных нарушений опорно-двигательного аппарата [RU 2235566 С2, A61N 1/16, 10.09.2004], который заключается в том, что при наличии способности у пациента к самостоятельному двигательному акту, проводится электростимуляция мышц одновременно с совершением пациентом двигательного акта, причем, электростимуляцию мышц проводят в фазах естественного возбуждения и сокращения мышц и осуществляют синхронизацию электростимуляции мышц с фазами двигательного акта, совершаемого пациентом, которую осуществляют с помощью угловых датчиков, причем, для проведения электростимуляции мышц применяют электроды, а двигательным актом, совершаемым пациентом при электростимуляции мышц, служит многократно повторяемое системное движение по заданной траектории.
Особенностью этого технического решения является то, что в качестве источника многократно повторяемого системного движения по заданной траектории используют тренажер. По мере формирования двигательных стереотипов и восстановления нервно-мышечного аппарата осуществляют повышение объема физической нагрузки увеличением количества повторяемых системных движений по траектории, заданной тренажером. При более продолжительном сеансе электростимуляции, в качестве тренажера используют или велотренажер, или имитатор ходьбы с эллипсоидной характеристикой движения опорных педалей, или имитатор ходьбы по лестнице. Кроме того, угловые датчики устанавливают на осях вращения элементов тренажера. Применяют от одной до нескольких пар электродов, соответствующих поперечному размеру стимулируемой мышцы и располагаемых перпендикулярно ходу мышечных волокон, которые накладывают на определенные группы мышц в зависимости от характера поражения. В начале цикла реабилитации продолжительность сеанса электростимуляции мышц составляет 30-40 мин, а затем продолжительность сеанса электростимуляции мышц доводят до 60-90 мин. При состояниях пациента, не сопровождающихся нарушением нервно-мышечной проводимости, амплитуда стимулирующего импульса составляет 30-80 В, длительность стимулирующих импульсов 20-200 мкс, частота следования стимулирующих импульсов 25-150 Гц, а при состояниях пациента, сопровождающихся нарушением нервно-мышечной проводимости, амплитуда стимулирующего импульса составляет 30-80 В, длительность стимулирующих импульсов варьируется от 20-200 мкс, частота следования стимулирующих импульсов составляет 25-150 Гц.
Недостатком наиболее близкого технического решения является относительно низкая эффективность реабилитации, вызванная тем, что в большом числе случаев у пациента одна из конечностей (например, нога) является здоровой, но для реабилитации второй конечности используется не информация о движении здоровой ноги, а многократно повторяемое системное движение по заданной траектории, источником которого является тренажер. Это снижает эффективность реабилитации и увеличивает ее сроки, причем, траектории движения здоровой ноги и здоровой руки пациента фиксируют размещенными на них угловыми датчиками движения.
Наиболее близким по технической сущности к предложенному является способ реабилитации функциональных нарушений опорно-двигательного аппарата [RU 2645928, C1, A61N 1/36, 28.02.2018], основанный на том, что проводят синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной ноге, а синхронизацию электростимуляции мышц больной ноги с фазами двигательного акта осуществляют в соответствии с системным движением по заданной траектории, причем, в качестве системного движения по заданной траектории принимают траекторию движения здоровой ноги, фиксируемую размещенными на ней угловыми датчиками движения, при этом, движение больной ноги по заданной траектории корректируют на каждом шаге пациента с учетом фиксируемого пространственного положения больной ноги с помощью установленных на ней датчиков движения.
Недостатком наиболее близкого технического решения является относительно низкая эффективность реабилитации, вызванная тем, что не осуществляются дополнительные воздействия на организм человека, которые в большом числе случаев повышают эффективность реабилитации и снижают ее сроки.
В частности, известно, что, в зависимости от объема поражения мозговой ткани, может произойти полная (паралич), либо частичная (парез) утрата управляемости мышцами. Как правило, в наиболее массовом случае -это парез, который захватывает и руку и ногу с одной стороны тела (гемипарез).
Если паретичными (т.е. подверженными парезу) конечностями двигать, в особенности принудительно, то постепенно в мозгу устанавливаются некие обходные пути проводимости нервных импульсов и управление мышцами восстанавливается. В наиболее близком техническом решении предложен способ такого принудительного движения, когда мышцы ног заставляют сокращаться скоординированные электрические импульсы, управляемые за счет измерения траекторий скелетных звеньев здоровой ноги.
Установлено, что восстановление способности к ходьбе после инсульта происходит значительно быстрее, если наряду с ногой одновременно приводить в движение паретичную руку.
В самом общем виде это объясняется тем, что область мозга, управляющая движением конечностей, весьма обширна, причем, большая ее часть приходится на управление передними конечностями (руками).
Считается, что так произошло исторически, т.к. первоначально предки человека передвигались на 4-х конечностях, при этом верхние развивались в гораздо большей степени и имеют, соответственно, значительно больший объем связей с другими нейронами, в частности, с теми, что управляют задними конечностями.
Поэтому для повышения эффективности реабилитации опорно-двигательного аппарата целесообразно наряду с ногой приводить в движение паретичную руку, при этом, восстановление естественной, физиологичной походки пойдет значительно быстрее.
Задачей, которая решается в предложенном изобретении, является создание способа, позволяющего более эффективно проводить реабилитацию и сокращать ее сроки.
Требуемый технический результат заключается в повышении эффективности и сокращении сроков реабилитации больной ноги при гемипарезе.
Поставленная задача решается, а требуемый технический результат достигается тем, что в способе, основанном на том, что в способе реабилитации функциональных нарушений опорно-двигательного аппарата при гемипарезе, основанном на том, что проводят синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной ноге, одновременно с этим проводят синхронную с фазами двигательного акта электростимуляцию мышц больной руки пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной руке, при этом, синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента и синхронную с фазами двигательного акта электростимуляцию мышц больной руки пациента осуществляют в соответствии с траекториями движения, соответственно, здоровой ноги и здоровой руки пациента, причем, траектории движения здоровой ноги и здоровой руки пациента фиксируют размещенными на них угловыми датчиками движения. На чертеже представлены:
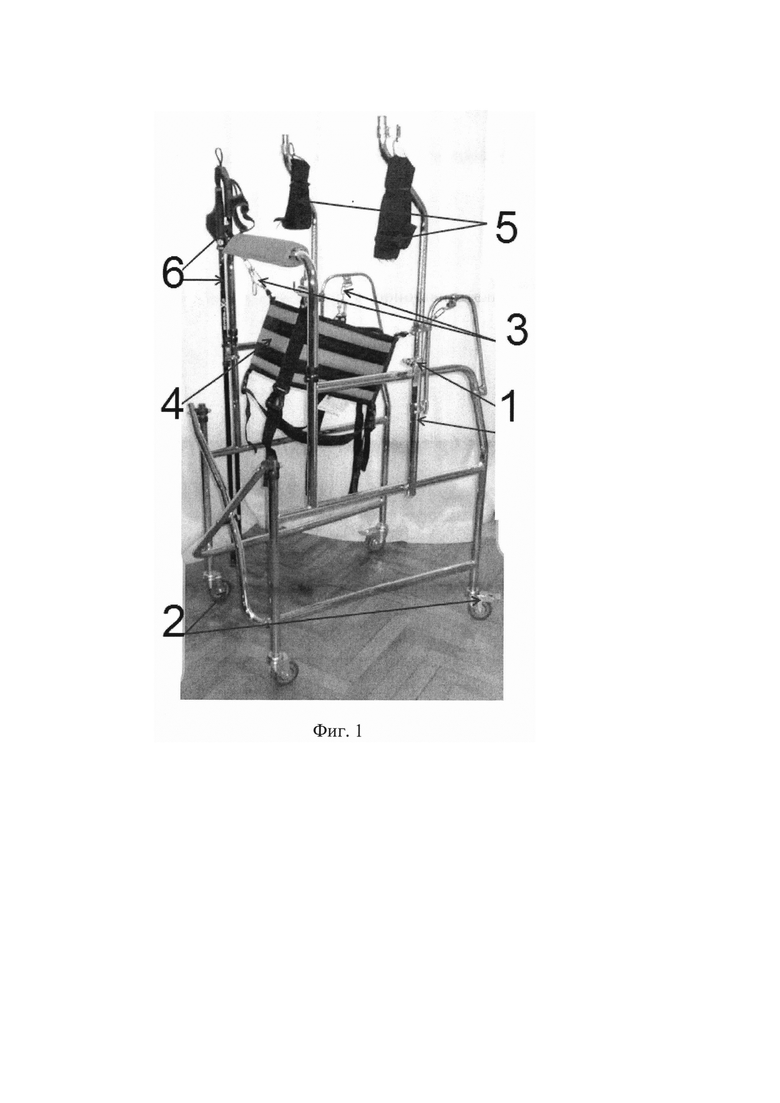
на фиг. 1 - конструкция устройства для реабилитации пациентов при гемипарезе;
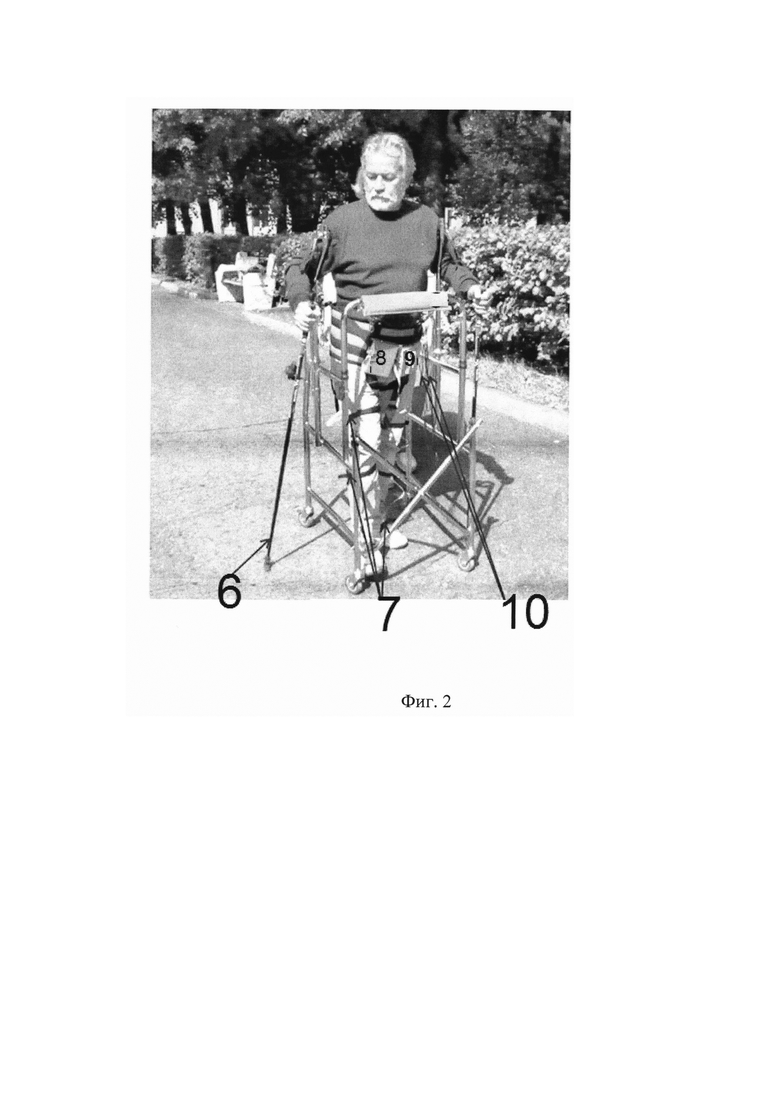
на фиг. 2 - пример использования устройства для реабилитации пациентов при гемипарезе при размещении электродов и датчиков движения на ногах и руках пациента, а модуля управления и модуля моистимуляции на поясе пациента.
Устройство для реабилитации пациентов при гемипарезе содержит раму 1 с приспособлениями для регулировки конструкции под размеры пациента, поворотные колеса 2 (в том числе и с тормозами), регулируемые подвески 3 для пояса 4 пациента, поддержки 5 для рук, палки 6 для скандинавской ходьбы, электроды и датчики 7 движения на ногах и руках пациента, модуль 8 управления и модуль 9 миостимуляции на поясе пациента, кабели 10.
Предложенный способ реабилитации функциональных нарушений опорно-двигательного аппарата реализуется следующим образом.
Примером его реализации является использование представленного устройства для реабилитации пациентов при гемипарезе при размещении электродов и датчиков движения на ногах и руках пациента, а модуля управления и модуля миостимуляции на поясе пациента.
Устройство представляет из себя складное П-образное трубчатое устройство, выполненное с использованием сварных, болтовых, цанговых и штифтовых соединений на поворотных колесах (при этом передняя пара колес снабжена тормозами, управляемыми нажатием стопы). Внутри устройства на регулируемых по высоте цепных растяжках и карабинах подвешен широкий прочный тканевый пояс с запахом, снабженным текстильными застежками типа «репейник» и дополнительными ремнями с пряжками. Пояс крепится на талии пациента, фиксируя его по центру устройства. К поясу на пряжках крепятся ножные петли из прочной ткани, которые пропускаются со спины между бедер и предотвращающие сползание пациента вниз.
Пациент размещается в устройстве с открытой стороны, затем с помощью ассистента фиксируется в нем поясом и начинает тренировку.
В случае, если подкосилась или подвернулась больная нога, то пациент не упадет - его удержит пояс с ножными петлями. Кроме того, в случае сильной усталости пациент может отдохнуть, слегка согнув ноги и опершись спиной на пояс, а ногами - на ремни. Если пациент полностью повиснет в воздухе, его центр тяжести продвинется несколько вперед, колени упрутся в скрещенные трубки конструкции, таким образом тело будет вывешено внутри устройства и падения не произойдет.
Во время движения пациент со всех сторон чувствует контакты с деталями устройства, что быстро превращается в неосознаваемое, но привычное ощущение защищенности. Использование устройства дает пациенту уверенность в том, что в случае внезапной проблемы с больной ногой падения не случится. Он постепенно приучается не бояться передвигаться в естественной позе прямохождения и проводимая миостимуляция становится более эффективной.
Для более полного контроля над равновесием пациенту предлагается воспользоваться палками для скандинавской ходьбы. Эти две палки в руках больного, хоть и не слишком твердо держащегося на ногах, все же вместо односторонней опоры дают симметричную двустороннюю опору. При отклонениях туловища от вертикали во время выполнения шагательных движений они позволяют больному лучше удерживать равновесие. Кроме того, участие рук в процессе ходьбы способствует более быстрому восстановлению координации движений.
Поскольку одна из рук пациента с гемипарезом обычно безвольно висит вдоль тела и не способна удерживать себя в согнутом состоянии, то устройство снабжено специальными поддержками для рук. Пациент вставляет предплечья в регулируемые кольцевые манжеты из эластичной ткани, которые подвешены на специальных кронштейнах, установленных на нужной высоте на раме. После этого он вдевает кисти рук в темляки (перчатки) палок, надежно фиксируя их. Теперь, даже в случае случайного разжатия кистей или потери координации пациентом палки не выпадут из его рук и за ними не придется наклоняться, тем более, что, находясь внутри устройства это невозможно.
Нагрузка от веса паретичной руки в такой конструкции устраняется, что облегчает пациенту движения больной конечностью и дает возможность вовлечь ее в процесс реабилитации.
Такое устройство позволяет одновременно использовать при тренировке больной ноги и активную электромиостимуляцию паретичной руки с использованием электродов модуля миостимуляции. Это существенно ускоряет восстановление навыков физиологичной ходьбы по сравнению с тренировкой только ноги.
Устройство и предложенный способ реабилитации было испытано в условиях клиники. С медицинским персоналом были подробно обсуждены все детали крепления пациента, подгонки различных звеньев устройства к размерам пациента, особенности поз, которые может занять тело при тех или иных обстоятельствах. В качестве преимуществ были отмечены большая степень безопасности пациента при ходьбе, более физиологичная поза и пр.
Пациент Б.А.П., 59 лет, в июле 2019 г. был оперирован по поводу заболевания позвоночника. Режим - полулежачий, был установлен диагноз - гемипарез. Рекомендованы тренировки с применением способа-прототипа RU 2645928.
Пациент Щ.Е.М., 64 года. Диагноз - гемипарез. Рекомендованы тренировки по предложенному способу. На фиг. 2 пациент идет по тротуару в устройстве фиг. 1, опираясь на палки для скандинавской ходьбы и снаряженный управляющим модулем и модулем миостимуляции. Датчики движения установлены поверх верхей одежды пациента. Электроды миостимуляции установлены на кожу, затем кабели выведены из-под брюк наружу и соединены с модулем миостимуляции с помощью разъемов.
Во втором примере реабилитации достигнуто примерно 20-30-процентное сокращение сроков реабилитации.
Таким образом, благодаря введению дополнительной операции, согласно которой наряду с электростимуляцией больной ноги синхронно можно проводить электростимуляцию и приводить в движение паретичную руку, восстановление естественной, физиологичной походки идет значительно быстрее, чем и достигается требуемый технический результат, заключающийся в повышении эффективности и сокращении сроков реабилитации больной ноги при гемипарезе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ реабилитации функциональных нарушений опорно-двигательного аппарата | 2017 |
|
RU2645928C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПОСЛЕ ТРАВМ И ПОРАЖЕНИЙ ГРУДНОГО И ПОЯСНИЧНОГО ОТДЕЛОВ ПОЗВОНОЧНИКА | 2017 |
|
RU2650210C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2002 |
|
RU2235566C2 |
| Способ восстановления функции ходьбы и равновесия в остром периоде ишемического инсульта | 2022 |
|
RU2797372C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ В РАННЕМ ВОССТАНОВИТЕЛЬНОМ ПЕРИОДЕ ЦЕРЕБРАЛЬНОГО ИНСУЛЬТА | 2012 |
|
RU2513418C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПОСЛЕ ТРАВМ И ПОРАЖЕНИЙ ПОЯСНИЧНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2016 |
|
RU2614890C1 |
| СПОСОБ ЛЕЧЕНИЯ ПАРЕЗОВ И ПАРАЛИЧЕЙ | 2010 |
|
RU2445990C1 |
| Способ реабилитации больных с постинсультными нарушениями в раннем восстановительном периоде | 2017 |
|
RU2642950C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ И ПОСЛЕДСТВИЙ ПОВРЕЖДЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2098149C1 |
Изобретение относится к медицине, а именно к способам реабилитации функциональных нарушений опорно-двигательного аппарата при гемипарезе. Способ основан на том, что проводят синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной ноге. Одновременно с этим проводят синхронную с фазами двигательного акта электростимуляцию мышц больной руки пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной руке. Синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента и синхронную с фазами двигательного акта электростимуляцию мышц больной руки пациента осуществляют в соответствии с траекториями движения соответственно здоровой ноги и здоровой руки пациента. Траектории движения здоровой ноги и здоровой руки пациента фиксируют размещенными на них угловыми датчиками движения. Достигается повышение эффективности и сокращение сроков реабилитации больной ноги при гемипарезе. 2 ил.
Способ реабилитации функциональных нарушений опорно-двигательного аппарата при гемипарезе, основанный на том, что проводят синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной ноге, одновременно с этим проводят синхронную с фазами двигательного акта электростимуляцию мышц больной руки пациента в фазах их естественного возбуждения и сокращения, для которой используют электроды, установленные на больной руке, при этом синхронную с фазами двигательного акта электростимуляцию мышц больной ноги пациента и синхронную с фазами двигательного акта электростимуляцию мышц больной руки пациента осуществляют в соответствии с траекториями движения соответственно здоровой ноги и здоровой руки пациента, причем траектории движения здоровой ноги и здоровой руки пациента фиксируют размещенными на них угловыми датчиками движения.
| Способ реабилитации функциональных нарушений опорно-двигательного аппарата | 2017 |
|
RU2645928C1 |
| CN 106492345 A, 15.03.2017 | |||
| СПОСОБ РЕАБИЛИТАЦИИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2002 |
|
RU2235566C2 |
| US 8214029 B2, 03.07.2012 | |||
| CN 106334267 A, 18.01.2017. | |||

