Изобретение относится к рыбной промышленности, а более конкретно к области технологического оборудования для загрузки рыбы в рыбообрабатывающие машины, и может найти применение на береговых рыбообрабатывающих предприятиях и судах промыслового флота.
Процесс загрузки рыбы оказывает существенное влияние на работу всего комплекса машин, обрабатывающих рыбу. Во-первых, низкая надежность загрузочных устройств сдерживает автоматизацию процессов обработки рыбы, во-вторых, ручная загрузка ограничивает производительность рыбообрабатывающих машин. Существующие отечественные и зарубежные загрузочные устройства, которыми оснащены рыбокомбинаты, зачастую работают ненадежно, а их производительность значительно меньше расчетной. Опыт эксплуатации существующих конструкций показывает, что надежность работы загрузочных устройств прежде всего определяется принципом действия рабочих органов.
Вместе с тем, форма тела рыбы, ее размеры, коэффициенты трения и упругопластические свойства колеблются в широких пределах. Ориентирование рыбы представляет собой сложную задачу, поскольку на вероятность исхода ориентирования влияют колебания ее формы и физических свойств, осложняющие процесс загрузки. Вследствие этого резко ограничено количество надежных и производительных способов загрузки, пригодных для рыбы. Сложная форма рыбы оказывается серьезным препятствием в разработке надежных накопителей. Кроме того, разработка загрузочных устройств осложняется низким пределом прочности рыбы, составляющим 3-8 Н/см2. Тушки легко повреждаются рабочими органами оборудования, поэтому многие средства, повышающие вероятность ориентирования и заполнение накопителя, не могут быть использованы при загрузке рыбы.
Основными проблемами реализации процесса загрузки рыбы являются следующие:
- предотвращение повреждений рыбы и изменения ее физических свойств. Механические напряжения, создаваемые рабочими органами в рыбе, не должны превышать 0,1 от предельных значений. Грани рабочих органов должны быть скруглены и выполнены из неметаллических материалов. Поверхности рабочих органов должны быть тщательно зачищены и отполированы;
- предотвращение застревания рыбы в рабочих органах загрузочного устройства. Хвост, плавники, жаберные крышки, обладая острыми и эластичными кромками, легко проникают в щели и застревают в них. Здесь же застревают и другие рыбы, препятствуя движению потока;
- рабочие органы должны быть доступными и безопасными для рабочего, устраняющего в процессе сбои машины. Рабочие органы и весь поток рыбы должны быть хорошо обозреваемы с места оператора, обслуживающего машину;
- детали загрузочных устройств не должны сильно загрязняться, но должны быть доступны санитарной обработке и устойчивы к воздействию воды.
Известно устройство для загрузки рыбы в рыбообрабатывающие машины (RU №1637736, МПК А22С 25/08, опубл. 30.03.1991), включающее загрузочный бункер, приспособления для ориентирования рыбы по голове и спинке, приспособление для поштучной подачи рыбы и синхронизатор. Приспособление для поштучной подачи рыбы содержит смонтированные на общем основании лотки и расположенные на выходе из лотков заслонки. Также устройство включает транспортирующие элементы, которые выполнены в виде роликов или центрирующих пластин и установлены на общем валу, расположенном над лотками.
К недостаткам данного устройства следует отнести низкую производительность, невысокую надежность загрузки рыбы, возможность повреждения тушек рабочими органами. При движении рыбы по вибрирующим желобам некоторые экземпляры не успевают ориентироваться головой вперед, что приводит к застреванию рыбы в сужающихся желобах. Устройство имеет сложную кинематическую схему, управление рабочими органами осуществляется копировально-кулачковым механизмом, что обусловливает низкую производительность и высокий уровень шума при работе.
Известно устройство для поштучной подачи рыбы (RU №1184505, МПК А22С 25/08, опубл. 15.10.1985), включающее ориентатор, механизм поштучной подачи рыбы, накопитель с конвейером, вакуумный трубопровод и вакуум-захваты для рыбы. Устройство снабжено вакуумными фиксаторами для рыб, установленными в накопителе под конвейером и последовательно соединенными с вакуумным трубопроводом с помощью клапанов переключения, причем ввод вакуумного трубопровода подсоединен к фиксатору, расположенному под вакуум-захватом. Днище накопителя имеет продольные щели для размещения в них ветвей конвейера и отверстия для вакуумных фиксаторов.
К недостаткам данного устройства следует отнести низкую производительность и недостаточно надежную работу механизма поштучной подачи рыбы. Поскольку рыба имеет различную толщину, между поверхностью тела некоторых тушек и вакуумными присосками образуются воздушные зазоры. Это приводит к ненадежной фиксации рыбы вакуумными присосками и снижению производительности. Сложность кинематической схемы механизма поштучной подачи рыбы также обусловливает низкую производительность устройства и повышенный уровень шума.
Известно устройство для загрузки рыбы в рыбообрабатывающую машину (US №2002022446, МПК А22С 25/08, опубл. 21.02.2002), включающее двухдорожечный конвейер, пару параллельных пластин, расположенных на обеих дорожках конвейера, а также седло для перемещения рыбы. Обезглавленная рыба приголовным срезом назад помещается на параллельные пластины. При прохождении седла между параллельными пластинами, створки седла заходят в брюшную полость, тушка захватывается седлом и перемещается в рыбообрабатывающую машину.
К недостаткам данного устройства следует отнести невозможность загрузки в рыбообрабатывающую машину целой рыбы и низкую производительность. Для захвата тушки седлом требуется точная ориентация и центрирование рыбы между параллельными пластинами приголовным срезом в сторону седла, поскольку в случае смещения тушки становится невозможным ее захват седлом. Это обусловливает необходимость ручной ориентации рыбы в случае неточной подачи тушки на параллельные пластины. Увеличение скорости движения конвейера снижает точность захвата тушки седлом, вследствие чего существенно ограничена производительность устройства.
Наиболее близким техническим решением является устройство позиционирования рыбы (RU №2104647, МПК А22С 25/08, опубл. 20.02.1998), включающее подводящий конвейер, загрузочный конвейер, улавливающее приспособление с улавливающим элементом, измерительное приспособление и вычислитель. Загрузочный конвейер снабжен опорным конвейером, имеющим опорные элементы, на которые укладывается обезглавленная рыба брюшной полостью для позиционирования. С этой целью между подводящим и загрузочным конвейерами установлено улавливающее приспособление, которое управляется циклически в смысле размыкания для освобождения рыбы, временно находящейся в улавливающем элементе. Рабочий цикл соответственно варьируется с учетом результата измерения, представляющего собой размер рыбы, так что каждая рыба независимо от ее размера подается с учетом относительного положения ее брюшной полости к опорным элементам на опорный транспортер.
Решающим недостатком, ограничивающим применение данного устройства, является его низкая производительность, обусловленная сложностью конструкции двухкоординатного последовательного режущего механизма и низким быстродействием улавливающего приспособления. Конструкция улавливающего элемента рассчитана на захват только обезглавленной тушки, что не позволяет загружать целую рыбу. Это существенно ухудшает универсальность устройства. Длина рыбы измеряется механическим датчиком, что приводит к возникновению большой погрешности измерения и снижению точности загрузки.
Изобретение решает задачи повышения производительности устройства для загрузки рыбы в рыбообрабатывающие машины с одновременным отбором из поступающего сырья полноценных неповрежденных тушек рыбы, за счет использования более точного и быстродействующего улавливающего приспособления для переноса тушек рыбы, а также использования в качестве измерительного приспособления прибора для получения видеоизображения рыбы.
Для достижения необходимых технических результатов в устройстве для загрузки рыбы в рыбообрабатывающие машины, включающем подводящий конвейер, загрузочный конвейер, улавливающее приспособление с улавливающим элементом, измерительное приспособление, вычислитель, предлагается в качестве измерительного приспособления использовать прибор для получения видеоизображения, устройство снабдить плитой, расположенной над подводящим и загрузочным конвейерами, на которой закрепить вычислитель с соединенными с ним источниками света, прибор для получения видеоизображения, улавливающее приспособление и исполнительный привод, который включает три шаговых двигателя, закрепленных по углам равностороннего треугольника. Улавливающее приспособление предлагается выполнить в виде трех рычагов, установленных на валах шаговых двигателей с возможностью синхронного поворота на заданный угол, и связанной с рычагами посредством трех пар штанг платформы. Пары штанг предлагается закрепить на одинаковом расстоянии от центра платформы по углам равностороннего треугольника и каждую пару штанг объединить при помощи верхней и нижней вставок, связанных с концами штанг сферическими шарнирными соединениями, причем верхние вставки закрепить на рычаге, а нижние - на платформе, в центре которой закрепить с возможностью поворота вокруг своей оси улавливающий элемент, снабженный приводом, связанным с вычислителем, и выполненный в виде вакуумной присоски. Устройство предлагается дополнительно снабдить вакуумным клапаном, закрепленным на плите и связанным с вычислителем, вакуумным трубопроводом, соединенным гибким шлангом с вакуумной присоской. Кроме того, подводящий конвейер предлагается выполнить составным, включающим подающий, операционный и инспекционный конвейеры, связанные с вычислителем, установленные с возможностью изменения скорости движения на отдельном конвейере.
В улавливающем приспособлении для регулировки улавливающего элемента предлагается использовать механизм параллельной структуры, основными достоинствами которого являются: лучшая грузоподъемность, высокая точность позиционирования рабочего органа, более высокая жесткость системы, высокие скорости и ускорения рабочего органа, высокая степень унификации мехатронных узлов.
Устройства, основанные на механизме параллельной структуры, обладают следующими преимуществами:
- значительно меньшая масса подвижных частей и постоянство их массы;
- упрощение конструкции, значительное уменьшение количества узлов и общего количества деталей;
- штанги работают только на растяжение-сжатие при отсутствии изгибающих нагрузок;
- высокая жесткость несущей системы устройства;
- упрощение сборки устройства.
Наиболее эффективным механизмом параллельной структуры является гексапод, обеспечивающий шесть степеней свободы. В отличие от традиционных многокоординатных последовательных систем, в которых погрешности по каждой из осей суммируются, погрешности в механизмах параллельной структуры могут взаимно компенсироваться, что обеспечивает высокую точность позиционирования. Кроме того, центр вращения гексапода может оставаться постоянным во время его перемещения. Жесткое соединение концов штанг обеспечивает отсутствие "мертвого хода", а также повышенную жесткость и грузоподъемность подвижной платформы, что позволяет закреплять на ней режущий инструмент. Поскольку в гексаподе используются парные штанги, нагрузка воспринимаемая каждой штангой, снижается.
Для точного улавливания рыбы на операционном конвейере требуется информация о местоположении тушки и ее ориентации. Сканирование рыбы позволяет получить ее видеоизображение в цифровом виде для последующей обработки. Информация о координатах и ориентации тушки позволяет вычислителю рассчитать рациональную траекторию движения улавливающего элемента.
Получение видеоизображения заключается в формализации зависимости интенсивности светового излучения с поверхности филе от координат отсканированных точек изображения. В цифровой форме видеоизображение филе представляется путем дискретизации аналоговой функции интенсивности светового излучения (яркости изображения) в точках изображения. Количество точек изображения, в которых выполняется дискретизация, определяет частоту дискретизации и выбирается по критерию качества, достаточному для уверенного распознавания контрастных участков.
Для распознавания образа рыбы проводится предварительная обработка цифрового изображения. Она заключается в пороговой фильтрации аппаратных шумов для удаления помех, вносимых в информацию об изображении филе со стороны прибора для получения видеоизображения (видеокамеры), каналов передачи данных, а также нежелательных засветок и бликов.
Разомкнутый шаговый электропривод обеспечивает устойчивое движение и сохранение полученной информации. Статическая и динамическая ошибки такого привода ограничены максимальными значениями, обусловленными ценою шага и числом тактов коммутации двигателя, и не превышают их во всем диапазоне нормальной работы.
Разомкнутый шаговый электропривод непосредственно реагирует на импульсные команды, причем информационная характеристика сигнала определяется только частотой и числом импульсных посылок. Изменения в определенных пределах амплитуды и формы импульса не нарушают нормальной работы. Скорость вращения и суммарный угол поворота вала двигателя пропорциональны соответственно частоте и числу поданных импульсов. При отсутствии сигнала коммутация фаз прекращается, поле в рабочем зазоре двигателя останавливается, а шаговый двигатель развивает значительный статический момент (синхронизирующий момент). Это позволяет приводу фиксировать конечные координаты любых перемещений. Таким образом, дискретный разомкнутый привод с шаговым двигателем является синхронно-импульсным следящим приводом, сочетающим в себе возможности глубокого частотного регулирования скорости с возможностями числового задания пути и надежной фиксации конечных координат.
Описание изобретения иллюстрируется прилагаемыми схемами, где на:
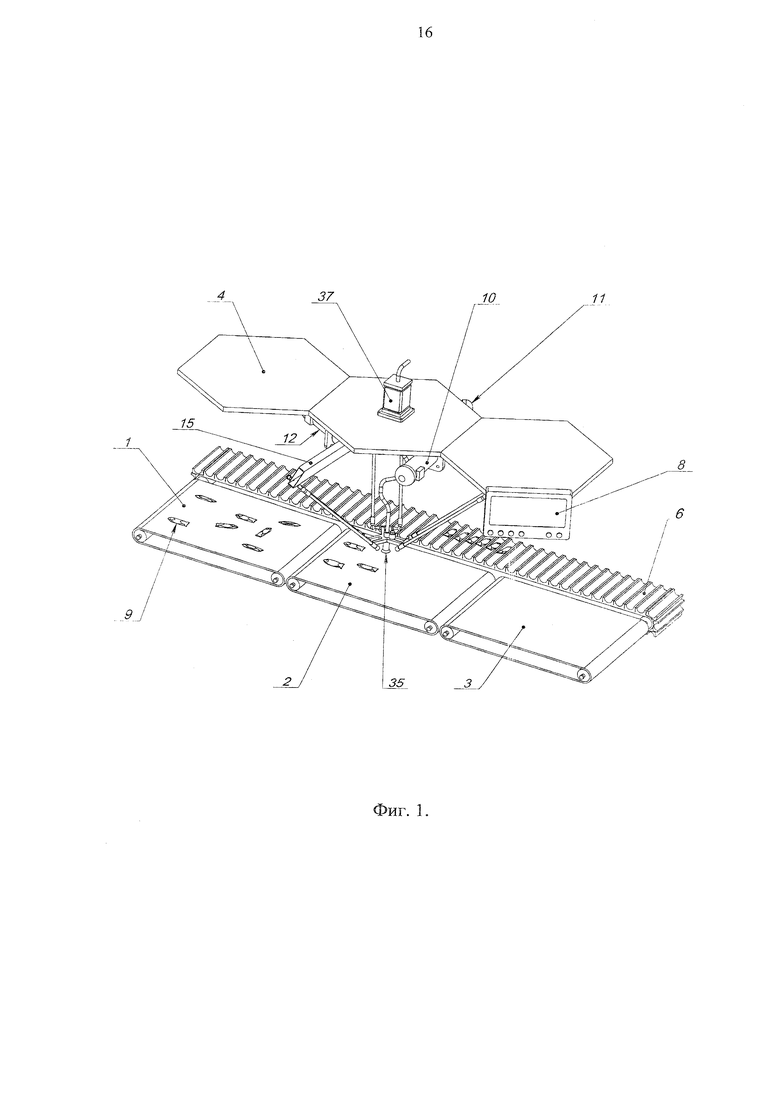
фиг. 1 - предлагаемое устройство для загрузки рыбы в рыбообрабатывающие машины, общий вид;
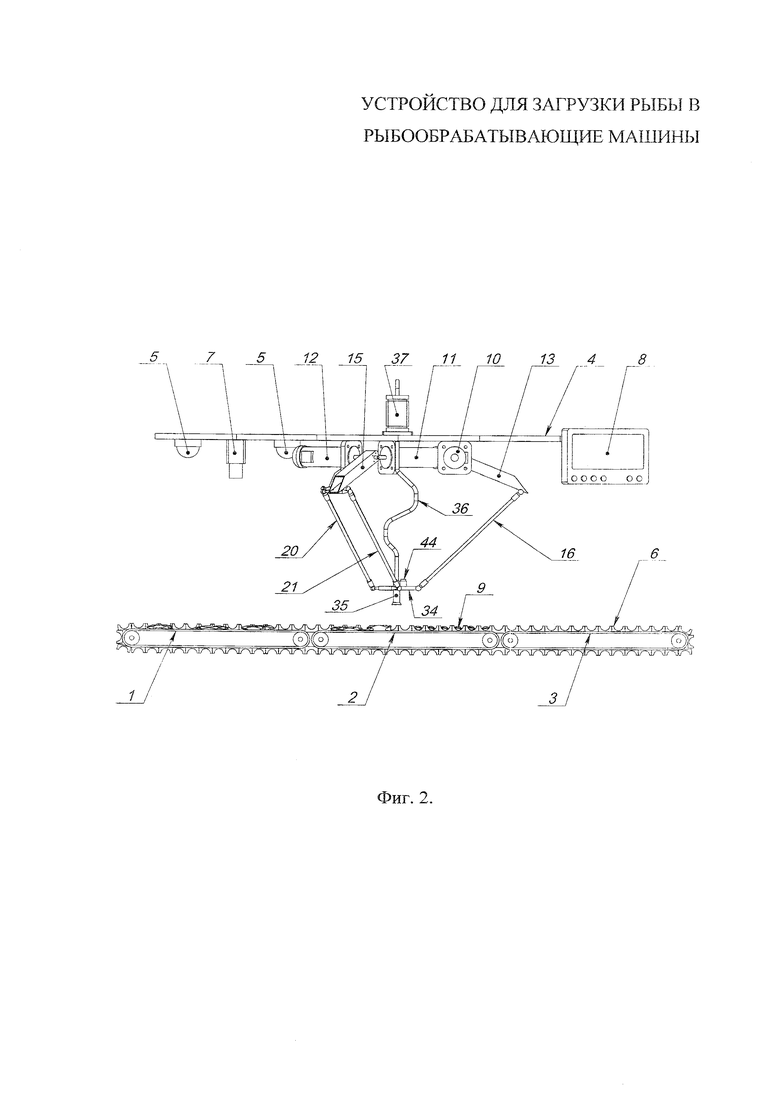
фиг. 2 - предлагаемое устройство для загрузки рыбы в рыбообрабатывающие машины, вид слева;
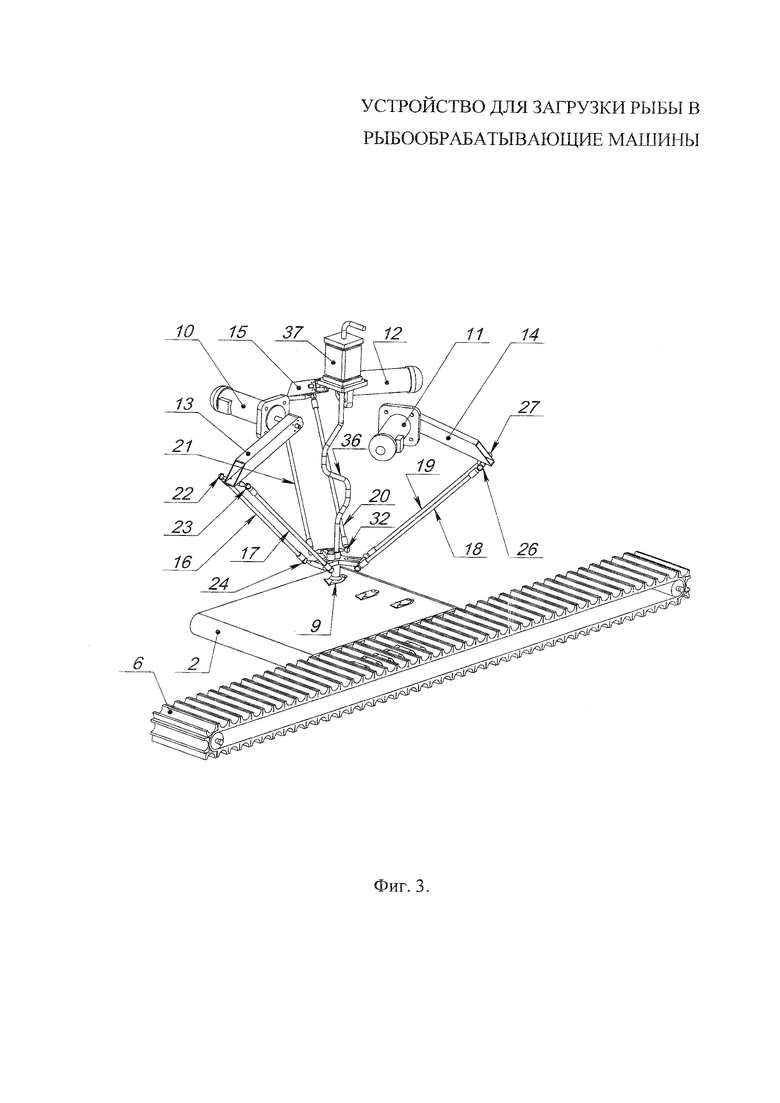
фиг. 3 - схема расположения улавливающего приспособления и исполнительного привода относительно операционного и загрузочного конвейеров;
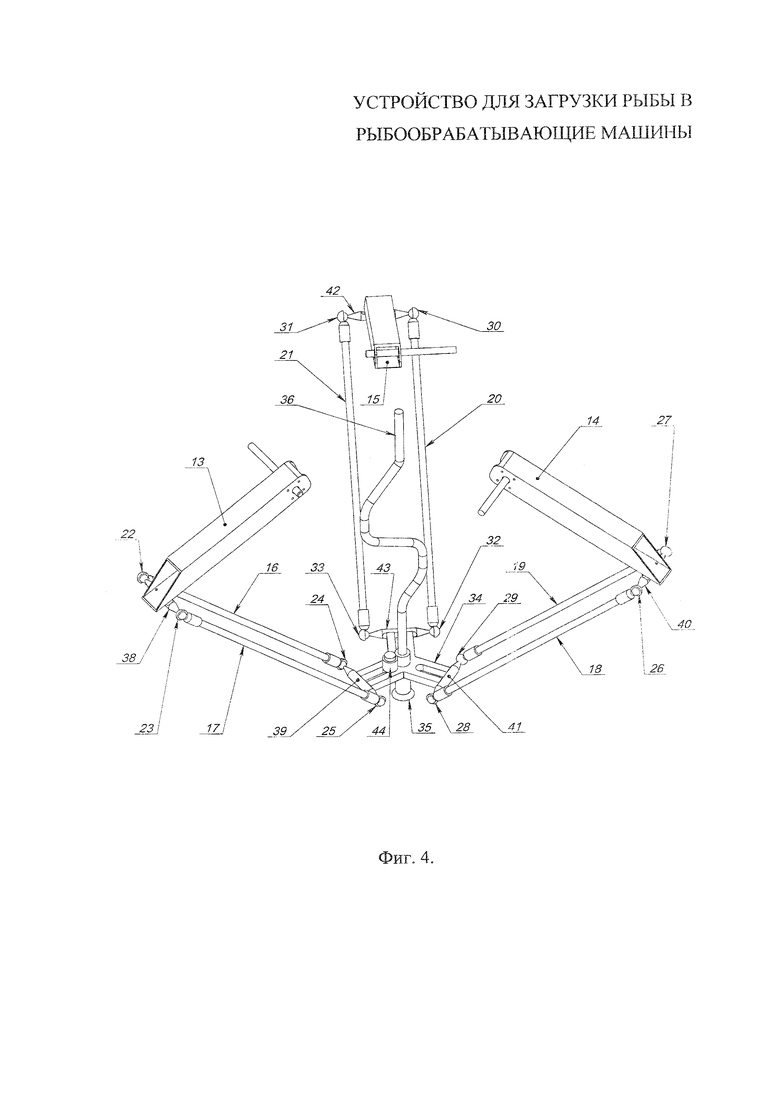
фиг. 4 - схема улавливающего приспособления.
На схемах приняты следующие обозначения:
1 - подающий конвейер;
2 - операционный конвейер;
3 - инспекционный конвейер;
4 - плита;
5 - источники света;
6 - загрузочный конвейер;
7 - прибор для получения видеоизображения;
8 - вычислитель;
9 - тушка;
10, 11, 12 - шаговый двигатель;
13, 14, 15 - рычаг;
16, 17, 18, 19, 20, 21 - штанга;
22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33 - сферический шарнир;
34 - платформа;
35 - улавливающий элемент;
36 - гибкий шланг;
37 - вакуумный клапан;
38, 39, 40, 41, 42, 43 - вставка;
44 - привод улавливающего элемента.
В предлагаемом техническом решении задача повышения производительности решается за счет использования в качестве улавливающего приспособления механизма параллельной структуры, который включает три рычага, шесть штанг, попарно объединенных при помощи верхней и нижней вставок, связанных с концами штанг сферическими шарнирными соединениями, и подвижную платформу. Требуемая траектория перемещения улавливающего элемента, выполненного в виде вакуумной присоски, относительно тушки рыбы обеспечивается синхронным изменением угловых и линейных положений штанг и рычагов. Благодаря высокому быстродействию механизма параллельной структуры, перемещение, ориентирование и укладка рыбы в загрузочный конвейер осуществляются без остановки конвейеров. Улучшение качества загрузки осуществляется за счет повышения быстродействия и точности регулировки улавливающего элемента, закрепленного на подвижной платформе, а также увеличения жесткости кинематических цепей, связывающих подвижную платформу с исполнительным приводом.
В предлагаемом устройстве для загрузки рыбы в рыбообрабатывающие машины над подающим конвейером 1, операционным конвейером 2, инспекционным конвейером 3 и загрузочным конвейером 6 расположена плита 4. Над подающим конвейером 1 на плите 4 закреплены источники света 5, соединенные с вычислителем 8, а также прибор для получения видеоизображения 7, соединенный с вычислителем 8. Вычислитель 8 закреплен на плите 4. На плите 4 закреплены шаговые двигатели 10, 11, 12, расположенные по сторонам равностороннего треугольника. Шаговый двигатель 10 соединен с рычагом 13, шаговый двигатель 11 соединен с рычагом 14, шаговый двигатель 12 соединен с рычагом 15. Рычаг 13 соединен со вставкой 38, которая соединена со сферическими шарнирами 22 и 23. Рычаг 14 соединен со вставкой 40, которая соединена со сферическими шарнирами 26 и 27. Рычаг 15 соединен со вставкой 42, которая соединена со сферическими шарнирами 30 и 31. Сферические шарниры 22 и 24 соединены со штангой 16, сферические шарниры 23 и 25 соединены со штангой 17, сферические шарниры 26 и 28 соединены со штангой 18, сферические шарниры 27 и 29 соединены со штангой 19, сферические шарниры 30 и 32 соединены со штангой 20, сферические шарниры 31 и 33 соединены со штангой 21. Штанги 16 и 17, 18 и 19, 20 и 21 соответственно образуют пары. Сферические, шарниры 24 и 25 соединены со вставкой 39. Сферические шарниры 28 и 29 соединены со вставкой 41. Сферические шарниры 32 и 33 соединены со вставкой 43. Вставки 39, 41, 43 соединены с платформой 34, в центре которой закреплен улавливающий элемент 35, выполненный в виде вакуумной присоски и имеющий возможность вращения вокруг своей оси. Платформа 34 имеет возможность трехкоординатного перемещения в пространстве с шестью степенями свободы. На платформе 34 закреплен привод улавливающего элемента 44, соединенный с улавливающим элементом 35 и вычислителем 8. На плите 4 закреплен вакуумный клапан 37, соединенный гибким шлангом 36 с полостью улавливающего элемента 35. Кроме того, вакуумный клапан 37 соединен с вычислителем 8 и вакуумным трубопроводом. При отсутствии команды включения вакуумный клапан 37 закрыт.
Описание работы устройства для загрузки рыбы в рыбообрабатывающие машины.
Тушка 9 помещается на ленту подающего конвейера 1. Вычислитель 8 подает команду включения на источники 5 света, которые освещают тушку 9. Яркость источников 5 света автоматически регулируется вычислителем 8 с целью получения более качественного изображения. Тушка 9 попадает в поле зрения прибора 7 для получения видеоизображения. Вычислитель 8 подает команду на прибор 7 для получения видеоизображения, который формирует видеоизображение общего вида тушки 9. Информация о видеоизображении общего вида тушки 9 передается прибором 7 для получения видеоизображения в вычислитель 8, где производится выделение контуров тушки 9, определяется положение и ориентация рыбы. Кроме того, по информации о видеоизображении вычислитель 8 определяет наличие на подающем конвейере 1 посторонних объектов и бракованных рыб, загрузка которых в рыбообрабатывающую машину не допускается. После этого вычислитель 8 вырабатывает информацию о координатах контура тушки 9 и ее ориентации. На основе этой информации вычислитель 8 рассчитывает координаты траектории, по которой должен перемещаться улавливающий элемент 35 с целью захвата тушки 9, ее точной укладки на загрузочный конвейер 6, а также угол поворота улавливающего элемента, обеспечиваемый приводом 44 с целью заданной ориентации тушки 9 головой в требуемую сторону. Далее тушка 9 перемещается на операционный конвейер 2. Вычислитель 8 рассчитывает координаты траектории движения улавливающего элемента 35 и формирует управляющие команды на шаговые двигатели 10, 11, 12. Информация об углах поворота передается вычислителем 8 на шаговые двигатели 30, 11, 12, которые поворачивают соответственно рычаги 13, 14, 15 на заданные углы. Движение рычагов 13, 14, 15 синхронизировано. В результате поворотов шаговых двигателей 10, 11, 12, рычаги 14, 15, 16 поднимают или опускают парные штанги 16 и 17, 18 и 19, 20 и 21. Синхронное перемещение парных штанг 16 и 17, 18 и 19, 20 и 21 обеспечивает заданное перемещение в пространстве платформы 34 с закрепленным на ней улавливающим элементом 35. При достижении платформой 34 заданной точки над тушкой 9, улавливающий элемент 35 касается поверхности тушки 9. В этот момент вычислитель 8 подает команду включения на вакуумный клапан 37, который подключен к вакуумному трубопроводу. Вакуумный клапан 37 открывается, и в полости улавливающего элемента 35 создается разрежение. В результате улавливающий элемент 35 присасывает тушку 9. Вычислитель 8 с учетом движения операционного конвейера 2 продолжает подавать команды на шаговые двигатели 10, 11, 12, которые поворачивают рычаги 13, 14, 15 на заданные углы. Синхронные перемещения рычагов 13, 14, 15 обеспечивают синхронные поднятия, опускания и повороты штанг 16 и 17, 18 и 19, 20 и 21 на сферических шарнирах 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33. Это, в свою очередь, обеспечивает заданное движение улавливающего элемента 35 с удерживаемой им тушкой рыбы 9 по рассчитанной пространственной криволинейной траектории. Во время перемещения улавливающего элемента 35 вычислитель 8 подает команду на привод 44 который поворачивает улавливающий элемент на заданный угол во время перемещения, обеспечивая тем самым заданную ориентацию тушки 9. При достижении улавливающим элементом 35 с тушкой 9 заданной точки над загрузочным конвейером 6. вычислитель 8 снимает команду включения на вакуумный клапан 37. Вакуумный клапан 37 закрывается, в полости улавливающего элемента 35 устанавливается атмосферное давление, в результате чего улавливающий элемент 35 перестает удерживать тушку 9 и она занимает место на загрузочном конвейере 6 с заданной ориентацией и далее перемещается в рыбообрабатывающую машину. Затем улавливающее приспособление 35 перемещается к следующей тушке 9, захватывает ее улавливающим элементом 35, перемещает, ориентирует и укладывает на загрузочный конвейер 6. Цикла повторяется до тех пор, пока не будут захвачены, перемещены, ориентированы и уложены все тушки рыбы, находящиеся на операционном конвейере 2. В случае попадания на операционный конвейер посторонних объектов и бракованной рыбы, вычислитель 8 пропускает их и не подает команды на исполнительный привод и вакуумный клапан 37. Вследствие этого улавливающее приспособление не перемещается к посторонним объектам и бракованной рыбе, и улавливающий элемент 35 не захватывает их, после чего они выводятся из устройства по инспекционному конвейеру 3 для инспекции. С целью накапливания посторонних объектов и бракованной рыбы на инспекционном конвейере 3 его скорость перемещения устанавливается меньшей по сравнению со скоростью операционного конвейера 2.
Таким образом, при использовании предлагаемого устройства, по сравнению с устройством, описанным в ближайшем аналоге, обеспечивается повышение производительности. Как показали промышленные испытания, производительность при загрузке рыбы с использованием предлагаемого устройства увеличилась в 3 раза. Это позволяет обеспечить ресурсосбережение на производстве. Кроме того, в загруженном сырье нет поврежденных тушек, т.к. производится автоматический отбор полноценных неповрежденных тушек рыбы в процессе загрузки, а поврежденные тушки отводятся инспекционным конвейером. Это обеспечивается при использовании прибора для получения видеоизображения рыбы.
Количество тушек рыбы, требующих ручной ориентации, сокращается на 94%. Существенно снижается сложность и материалоемкость конструкции.
Устройство обеспечивает качественную загрузку рыбы в рыбообрабатывающие машины, что позволяет исключить трудоемкие операции визуальной инспекции и ручной укладки сырья, а также сократить количество персонала на производстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2017 |
|
RU2649340C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ РЫБНОГО ФИЛЕ | 2015 |
|
RU2599622C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОГО РАЗДЕЛЕНИЯ И ОРИЕНТИРОВАНИЯ РЫБЫ | 2016 |
|
RU2645977C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ РЫБЫ ГОЛОВОЙ В ОДНОМ НАПРАВЛЕНИИ | 2008 |
|
RU2363162C1 |
| УСТРОЙСТВО ДЛЯ ФИЛЕТИРОВАНИЯ РЫБЫ | 2006 |
|
RU2320178C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2006 |
|
RU2320177C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ РЫБЫ ГОЛОВОЙ В ОДНУ СТОРОНУ | 2016 |
|
RU2645974C2 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ | 2014 |
|
RU2582351C1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ | 2016 |
|
RU2628797C1 |
| УСТРОЙСТВО ДЛЯ МОЙКИ РЫБЫ | 2015 |
|
RU2601596C1 |
Устройство включает подводящий конвейер, загрузочный конвейер, улавливающее приспособление с улавливающим элементом, измерительное приспособление, вычислитель. В качестве измерительного приспособления использован прибор для получения видеоизображения. Устройство снабжено плитой (4), расположенной над подводящим и загрузочным конвейерами, на которой закреплен вычислитель (8) с соединенными с ним источниками света, прибор для получения видеоизображения, улавливающее приспособление и исполнительный привод, который включает три шаговых двигателя (10, 11, 12), закрепленных по углам равностороннего треугольника. Улавливающее приспособление выполнено в виде трех рычагов (13, 14, 15), установленных на валах шаговых двигателей с возможностью синхронного поворота на заданный угол. С рычагами связана посредством трех пар штанг платформа (34). Пары штанг закреплены на одинаковом расстоянии от центра платформы по углам равностороннего треугольника. Каждая пара штанг объединена при помощи верхней и нижней вставок, связанных с концами штанг сферическими шарнирными соединениями. Верхние вставки закреплены на рычаге, а нижние - на платформе, в центре которой закреплен с возможностью поворота вокруг своей оси улавливающий элемент, снабженный приводом, связанным с вычислителем, и выполненный в виде вакуумной присоски (35). Устройство дополнительно снабжено вакуумным клапаном (37), закрепленным на плите и связанным с вычислителем, вакуумным трубопроводом, соединенным гибким шлангом с вакуумной присоской. Подводящий конвейер выполнен составным, включающим подающий (1), операционный (2) и инспекционный (3) конвейеры, связанные с вычислителем, установленные с возможностью изменения скорости движения на отдельном конвейере. Изобретение повышает производительность загрузки рыбы в рыбообрабатывающие машины с одновременным отбором неповрежденных тушек рыбы. 4 ил.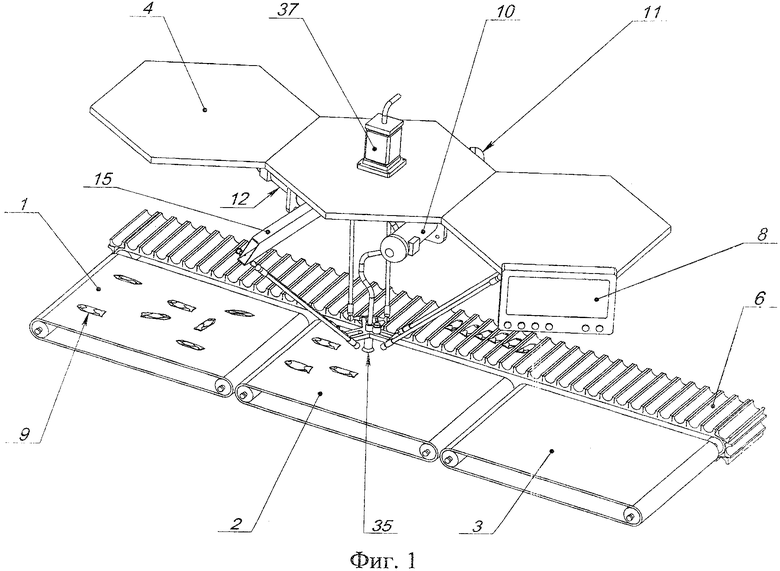
Устройство для загрузки рыбы в рыбообрабатывающие машины, включающее подводящий конвейер, загрузочный конвейер, улавливающее приспособление с улавливающим элементом, измерительное приспособление, вычислитель, отличающееся тем, что в качестве измерительного приспособления использован прибор для получения видеоизображения, устройство снабжено плитой, расположенной над подводящим и загрузочным конвейерами, на которой закреплен вычислитель с соединенными с ним источниками света, прибор для получения видеоизображения, улавливающее приспособление и исполнительный привод, который включает три шаговых двигателя, закрепленных по углам равностороннего треугольника, а улавливающее приспособление выполнено в виде трех рычагов, установленных на валах шаговых двигателей с возможностью синхронного поворота на заданный угол, и связанной с рычагами посредством трех пар штанг платформы, причем пары штанг закреплены на одинаковом расстоянии от центра платформы по углам равностороннего треугольника и каждая пара штанг объединена при помощи верхней и нижней вставок, связанных с концами штанг сферическими шарнирными соединениями, причем верхние вставки закреплены на рычаге, а нижние - на платформе, в центре которой закреплен с возможностью поворота вокруг своей оси улавливающий элемент, снабженный приводом, связанным с вычислителем, и выполненный в виде вакуумной присоски, а устройство дополнительно снабжено вакуумным клапаном, закрепленным на плите и связанным с вычислителем, вакуумным трубопроводом, соединенным гибким шлангом с вакуумной присоской, кроме того, подводящий конвейер выполнен составным, включающим подающий, операционный и инспекционный конвейеры, связанные с вычислителем, установленные с возможностью изменения скорости движения на отдельном конвейере.
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ РЫБЫ | 1996 |
|
RU2104647C1 |
| Устройство для поштучной подачи рыбы | 1983 |
|
SU1184505A1 |
| Устройство для загрузки рыбы в рыбообрабатывающие машины | 1988 |
|
SU1637736A1 |

