Изобретение относится к рыбной промышленности, а более конкретно к области автоматизированного оборудования для ориентирования рыбы головой в одном направлении, и может найти применение на береговых рыбообрабатывающих предприятиях и судах промыслового флота.
Работа современной рыборазделочной машины предполагает предварительное ориентирование рыбы по определенному признаку, а также правильную укладку тушек на операционный конвейер машины. В общем случае, загрузочная машина выполняет следующие технологические операции: поштучное разделение тушек, ориентирование рыбы головой в одном направлении, своевременная поштучная подача ориентированных тушек на операционный конвейер рыборазделочной машины. Перечисленные технологические операции выполняются соответствующими устройствами, чаще всего входящими в состав загрузочной машины.
В настоящее время повышение производительности рыбообрабатывающих производств сдерживается отсутствием надежных устройств для автоматической загрузки сырья в рыборазделочные машины. В связи с этим не удается осуществить полную автоматизацию обработки рыбы и, как следствие, невозможно отказаться от утомительного ручного труда на рыборазделочных производствах.
Основным фактором, определяющим надежность и стабильность работы рыборазделочной машины, является операция предварительного ориентирования рыбы головой в одном направлении. От правильности выполнения операции ориентирования рыбы зависит общая производительность рыбообрабатывающего производства и качество продуктов разделывания.
Наиболее эффективная загрузка рыборазделочной машины достигается в том случае, если рыба предварительно отделяется поштучно от наваленных тушек, а затем ориентируется головой в одном направлении. Для ориентирования рыбы применяются следующие основные способы:
- ориентирование рыбы на горизонтальной колеблющейся плоскости;
- ориентирование рыбы на наклонной плоскости;
- ориентирование рыбы на планках, движущихся в противофазе;
- ориентирование рыбы за счет разделения потока тушек при помощи определения положения головы каждого экземпляра.
Существующие устройства для ориентирования рыбы головой в одном направлении, реализующие вышеперечисленные способы, включают механические приспособления для контактного измерения параметров сырья. Вместе с тем, экземпляры даже одного вида рыбы отличаются по размерам, форме и другим физическим свойствам. Зачастую отсутствует геометрическое подобие между особями одного вида рыбы. Это приводит к тому, что существующие устройства для ориентирования рыбы допускают неправильное ориентирование тушек.
Цена ошибки при ориентировании рыбы достаточно высокая, поскольку возрастает вероятность заклинивания рабочих органов рыборазделочной машины из-за ошибочно ориентированной рыбы, а также возможен аварийный останов всей рыбообрабатывающей линии. Таким образом, надежность операции ориентирования рыбы головой в одном направлении оказывает существенное влияние на стабильность работы рыборазделочных машин и, в то же время, остается невысокой в существующих устройствах для ориентирования.
С учетом вышеизложенного требуется устройство, обеспечивающее надежное выполнение операции ориентирования рыбы с высокой производительностью.
Известно устройство для ориентирования рыбы головой в одном направлении (акцепт, заявка №26471-75 Япония, МКИ А22С 25/12, опубл. 01.09.75), включающее конвейер, состоящий из бесконечных цепей и натянутой между этими цепями сетки. Конвейер имеет волнообразную поверхность, сформированную крутыми спусками и пологими подъемами. Также устройство включает звездочку для поддерживания цепей, разделяющие перегородки, прикрепленные к боковым пластинам цепей, наклонный лоток для приема ориентированной рыбы, а также трубки для разбрызгивания воды навстречу движущейся рыбе.
Устройство осуществляет ориентирование рыбы за счет разницы между массами головной и хвостовой частей тушки. Рыба при движении по волнообразной поверхности конвейера орошается встречными струями воды, разбрызгиваемой из трубок под давлением, и разворачивается головой вперед, так как масса хвостового плавника меньше массы головы.
Основным недостатком данного устройства является невысокая надежность ориентирования рыбы. Разница между массами головы и хвостовой части может быть незначительной, вследствие чего часто происходит неправильное ориентирование рыбы, приобретающее случайный характер. Кроме того, производительность устройства является небольшой, поскольку увеличение скорости движения конвейера в данном случае снижает надежность операции ориентирования. Компенсировать такое снижение надежности ориентирования за счет повышения давления воды, разбрызгиваемой из трубок, не удается, так как слишком высокое водяное давление почти с одинаковой вероятностью разворачивает тушку головой или хвостом назад. Наряду с этим, разница между коэффициентами трения головы рыбы и хвостовой части относительно поверхности конвейера вносит дополнительные случайные возмущения, нарушающие правильное ориентирование. При обработке рыбы с формой тела, близкой к окружности, надежность ориентирования также снижается.
Известно устройство для ориентированной управляемой подачи рыбы (акцепт, заявка № 24871-75 Япония, МКИ А22С 25/12, опубл. 19.08.75), включающее бак для рыбы, источник поперечных колебаний, ориентирующий конвейер, выходной конвейер, поверхность которого совершает наклонные колебания, а также вспомогательный конвейер. Устройство позволяет ориентировать рыбу головой в одном направлении, разделять обрабатываемые тушки на два потока с противоположной ориентацией голов, причем оба потока могут подаваться в рыборазделочные машины.
В устройстве выполняется предварительное поштучное разделение рыбы, автоматически выбираемой из бака с наваленными тушками. В ориентирующем конвейере устройства происходит выравнивание рыбы вдоль направления движения, после чего под действием силы тяжести тушки падают на выходной конвейер. За счет наклонных колебательных движений поверхности выходного конвейера тушки ориентируются головой вперед. Вследствие наличия на поверхности выходного конвейера элементов с волнообразной поверхностью осуществляется механическое разделение рыбы, ориентированной головой в разные стороны. Первый поток рыбы с правильной ориентацией голов подается в рыборазделочную машину, а второй поток тушек, ориентированных головой в противоположную сторону, при движении по вспомогательному конвейеру разворачивается и также подается в рыборазделочную машину.
Основными недостатками данного устройства являются низкая надежность ориентирования и невысокая производительность. В связи с тем, что ориентирование рыбы происходит за счет разницы между массами головы и хвостовой части, тушка может случайно разворачиваться неправильно, особенно, если разница между массами частей тела рыбы незначительная. Возмущающее воздействие на правильность ориентирования оказывают коэффициенты трения головы и хвоста тушки относительно поверхности выходного конвейера. Кроме того, в устройстве возможен поперечный разворот тушек относительно направления движения и подача такой рыбы с неправильной ориентацией в рыборазделочную машину. Увеличение производительности устройства за счет повышения скорости движения конвейеров приводит к снижению надежности ориентирования рыбы. Вследствие наличия на выходном конвейере листовых элементов с волнообразной поверхностью, которые зацепляют рыбу за чешую и жабры, возможно появление дополнительных ошибок в ориентировании и повреждений кожи тушек. Устройство имеет невысокую универсальность относительно формы тела рыбы, которая ограничивается диапазоном рыб с вытянутым веретенообразным телом.
Наиболее близким техническим решением является устройство для ориентирования рыбы головой в одном направлении (акцепт, заявка № 15973-80 Япония, МКИ А22С 25/12, опубл. 28.04.80), включающее бак для рыбы, подающий конвейер, приспособление для разделения рыбы на два потока с противоположной ориентацией голов, отводящие конвейеры.
Устройство позволяет ориентировать рыбу головой в одном направлении, разделять рыбу на два потока с противоположной ориентацией голов. В устройстве осуществляется предварительное поштучное разделение рыбы, поднимаемой из бака подающим конвейером, который имеет соответствующие вертикальные планки. Во время перемещения рыбы на подающем конвейере выровненные тушки ориентированы головой случайным образом в противоположные стороны. Рыба подается под приспособление для разделения на два потока, выполненное в виде двух круглых щеток с ворсом, которые вращаются в противоположных направлениях. За счет того, что толщина головной части рыбы чаще всего больше толщины хвостовой части, происходит касание тела рыбы той щеткой, которая находится соответственно над головой. В результате тушка перемещается на тот выходной конвейер, к которому ориентирована голова рыбы.
Основным недостатком данного устройства является невысокая надежность работы приспособления для разделения рыбы на два потока с различной ориентацией. В случае захватывания ворсом щетки хвостового плавника рыбы может произойти неправильное ориентирование. Если тушка имеет незначительную разницу между толщиной головной части и хвостом, то обе щетки могут потянуть рыбу в противоположные стороны, что приводит к повреждению тела рыбы и заклиниванию устройства. Так как перемещение тушки осуществляется усилием со стороны ворсистой щеткой, а для уверенного перемещения требуется существенное усилие с учетом скользкой поверхности рыбы, то возможно повреждение кожи тушки и ухудшение товарного вида продукта. Кроме того, возможно проскальзывание ворса щетки по мокрой поверхности рыбы, что также влечет заедание устройства. Наряду с этим, устройство не может ориентировать рыбу хвостом в сторону движения тушек, что требуется для некоторых рыборазделочных машин.
Изобретение решает задачу повышения производительности процесса ориентирования и надежности ориентирования рыбы головой в одном направлении, а также увеличения универсальности устройства относительно формы тела рыбы, за счет использования информации, полученной в результате цифровой обработки видеоизображения тушки рыбы.
Для достижения необходимого технического результата известное устройство, включающее бак для рыбы, подающий конвейер, ориентированный наклонно и погруженный нижней частью в бак для рыбы, приспособление для разделения рыбы на два потока с противоположной ориентацией голов, расположенное между двумя отводящими конвейерами, дополнительно снабжено вспомогательным конвейером, ориентированным горизонтально и установленным за подающим конвейером по ходу движения рыбы, оптическими датчиками наличия рыбы, установленными над вспомогательным и отводящими конвейерами, приспособлением для получения видеоизображения рыбы, установленным над вспомогательным конвейером, управляющим блоком. Приспособление для разделения рыбы на два потока выполнено в виде реверсивного конвейера. Управляющий блок связан с конвейерами, оптическими датчиками, приспособлением для получения видеоизображения рыбы.
Для автоматического принятия решения о перемещении тушки на один из отводящих конвейеров в зависимости от ориентации головы требуется информация о фактическом расположении головы рыбы. Данные о координатах головы могут быть получены в результате обработки информации о геометрической форме рыбы, а также о положении жаберной щели. Видеосканирование тушки позволяет получить ее графическое изображение в цифровом виде для последующей обработки в управляющем блоке. Распознавание контуров рыбы по ее изображению позволяет выявить геометрическую форму и размеры каждого экземпляра.
Рыба основных промысловых видов характеризуется тем, что жаберная щель выделяется значительно меньшей интенсивностью излучения отраженного света на фоне приголовной части. Этот признак позволяет определить очертания жаберной крышки и выявить истинное положение головы для автоматического принятия точного решения об ориентировании рыбы.
Получение видеоизображения тушки заключается в формализации зависимости интенсивности светового излучения с поверхности рыбы от координат отсканированных точек изображения. В цифровой форме видеоизображение рыбы представляется путем дискретизации аналоговой функции интенсивности светового излучения (яркости изображения) в точках изображения. Количество точек изображения, в которых выполняется дискретизация, определяет частоту дискретизации и выбирается по критерию качества, достаточному для уверенного распознавания контрастных участков.
Для распознавания контуров тушки и контрастной жаберной щели проводится предварительная обработка цифрового изображения. Она заключается в пороговой фильтрации аппаратных шумов для удаления помех, вносимых в информацию об изображении рыбы со стороны приспособления для получения видеоизображения (видеокамеры), каналов передачи данных, а также нежелательных засветок и бликов.
Распознавание контуров тушки, а также контура жаберной щели осуществляется при помощи дифференциального алгоритма обработки графической информации, основанного на методе поиска максимума функции яркости изображения при помощи математического оператора Робертса.
В результате распознавания контуров рыбы и жаберной щели формируется двумерная матрица координат, включающая координаты контурной линии всей тушки и координаты контурной линии жаберной щели. На основании этой информации рассчитываются координаты головы, и принимается решение о направлении тушки на соответствующий отводящий конвейер, то есть обеспечивается безошибочное выполнение операции ориентирования рыбы. После чего рассчитывается управляющее воздействие на привод реверсивного конвейера. Поверхность реверсивного конвейера перемещается вправо или влево, вследствие чего рыба перемещается на отводящий конвейер, соответствующий ориентации ее головы.
К описанию прилагается схема устройства для ориентирования рыбы головой в одном направлении.
На схеме приняты следующие обозначения:
1 - подающий конвейер;
2 - тушка рыбы;
3 - бак;
4 - вспомогательный конвейер;
5 - луч лазера;
6, 7, 8, 9, 10, 11 - датчик наличия рыбы;
12 - управляющий блок;
13 - приспособление для получения видеоизображения рыбы;
14 - реверсивный конвейер;
15, 16 - отводящие конвейеры;
17 - направляющая пластина.
В предлагаемом техническом решении повышение надежности ориентирования рыбы головой в одном направлении осуществляется за счет получения видеоизображения общего вида обрабатываемой рыбы и дальнейшего распознавания контуров тушки и жаберной щели в управляющем блоке. Увеличение производительности осуществляется за счет бесконтактного определения расположения головы каждой тушки, высокой скорости срабатывания устройства для получения видеоизображения тушки, быстрого принятия решения о направлении рыбы на соответствующий отводящий конвейер, а также ускоренного движения реверсивного конвейера. Повышение универсальности относительно формы тела рыбы обеспечивается за счет точного распознавания таких уникальных признаков обрабатываемого объекта, как контур тушки и контур жаберной щели, что позволяет уверенно определять расположение головы у подавляющего большинства промысловых рыб, информация о которых предварительно записывается в память управляющего блока. Кроме того, устройство имеет возможность ориентировать рыбу хвостом в сторону движения тушек.
В предлагаемом устройстве для ориентирования рыбы головой в одном направлении подающий конвейер 1, имеющий планки для удержания на его поверхности рыбы, установлен наклонно и нижней частью погружен в бак 3, содержащий воду и охлажденные тушки рыбы 2. Вспомогательный конвейер 4 установлен горизонтально после подающего конвейера 1 таким образом, что имеется возможность свободного перемещения тушки рыбы 2 с поверхности подающего конвейера 1 на поверхность вспомогательного конвейера 4. Над поверхностью вспомогательного конвейера 4 установлены взаимно сопряженные оптические датчики наличия рыбы 6 и 7, формирующие лазерный луч 5, который может перекрываться тушкой рыбы 2 при ее прохождении между датчиками 6 и 7. Над вспомогательным конвейером 4 размещено приспособление для получения видеоизображения рыбы 13, содержащее осветители, и предназначенное для видеосканирования каждой проходящей под ним рыбы. Тушка рыбы 2 может свободно проходить под приспособлением для получения видеоизображения рыбы 13, при этом попадая в его поле зрения. Реверсивный конвейер 14, поверхность которого может двигаться вправо или влево, установлен таким образом, что тушка рыбы 2 свободно попадает на него с вспомогательного конвейера 4, проходя в освещенном поле зрения приспособления для получения видеоизображения рыбы 13. Слева от реверсивного конвейера 14 установлен отводящий конвейер 15 таким образом, чтобы тушка рыбы 2 свободно попадала на него при движении поверхности реверсивного конвейера 14 влево. Справа от реверсивного конвейера 14 установлен отводящий конвейер 16 таким образом, чтобы тушка рыбы 2 свободно попадала на него при движении поверхности реверсивного конвейера 14 вправо. Над поверхностью отводящего конвейера 15 установлены взаимно сопряженные оптические датчики наличия рыбы 8 и 9, а также смонтированы направляющие пластины 17, предназначенные для выравнивания рыбы. Над поверхностью отводящего конвейера 16 установлены взаимно сопряженные оптические датчики наличия рыбы 10 и 11. Управляющий блок 12 соединен с подающим конвейером 1, вспомогательным конвейером 4, приспособлением для получения видеоизображения рыбы 13, реверсивным конвейером 14, отводящим конвейером 15, отводящим конвейером 16, оптическими датчиками наличия рыбы 6, 7, 8, 9, 10, И. Датчики наличия рыбы 6, 8, 10 выполняются в виде лазерного излучателя, а сопряженные с ними датчики наличия рыбы 7, 9, 11 выполняются в виде фотоприемника.
Работа устройства для ориентирования рыбы головой в одном направлении осуществляется следующим образом.
Подающий конвейер 1, при помощи планок, имеющихся на его поверхности, выбирает тушку рыбы 2 из бака 3, в котором в воде находится охлажденная рыба. С поверхности подающего конвейера 1 тушка рыбы 2 после подъема перемещается на поверхность вспомогательного конвейера 4, двигаясь по которому она пересекает луч лазера 5, направленный из датчика наличия рыбы 6 в датчик наличия рыбы 7. Сигнал о присутствии тушки передается датчиком наличия рыбы 7 в управляющий блок 12. В случае, если сигнал о наличии рыбы при этом поступает дольше допустимого времени, управляющий блок 12 передает сигнал останова на подающий конвейер 1 и формирует сигнал аварийной ситуации для системы управления верхнего уровня. При появлении сигнала с датчика наличия рыбы 7 и пропадании данного сигнала через допустимое время управляющий блок 12 передает в приспособление для получения видеоизображения рыбы 13 сигнал готовности с некоторой задержкой, которая определяется скоростью движения вспомогательного конвейера 4. Тушка рыбы 2 проходит под приспособлением для получения видеоизображения рыбы 13, которое после поступления от управляющего блока 12 сигнала готовности выполняет видеосканирование тушки. Видеоизображение общего вида рыбы из приспособления для получения видеоизображения рыбы 13 передается в управляющий блок 12. Управляющий блок 12 осуществляет перевод полученного графического изображения в цифровой вид, последовательно осуществляет фильтрацию помех на изображении, выделяет контуры рыбы, контур жаберной щели, распознает фактическое положение головы рыбы. После этого управляющий блок 12 передает на реверсивный конвейер 14 сигнал начала движения в сторону отводящего конвейера 15, если голова рыбы на изображении направлена влево, или сигнал начала движения в сторону отводящего конвейера 16, если голова рыбы направлена вправо. В случае необходимости подачи рыбы, ориентированной хвостом в сторону движения, сигналы управления изменяются на противоположные. Тушка рыбы 2, продолжая движение по поверхности вспомогательного конвейера 4, покидает освещенное поле зрения приспособления для получения видеоизображения рыбы 13 и перемещается на поверхность реверсивного конвейера 14. После покидания вспомогательного конвейера 4 тушка рыбы 2 без изменения ориентации начинает двигаться по поверхности реверсивного конвейера 14 в сторону соответствующего отводящего конвейера 15 или 16. Затем рыба покидает реверсивный конвейер 14 и двигается по отводящему конвейеру 15 или 16, кратковременно пересекая луч лазера датчиков наличия рыбы 8 и 9 или 10 и 11. Сигналы с датчиков наличия рыбы 9 или 11 поступают в управляющий блок 12, который после ухода тушки рыбы 2 с линии соответствующего лазерного луча 5 передает сигнал останова на реверсивный конвейер 14. В случае, если сигнал перекрытия рыбой лазерного луча 5 с датчиков наличия рыбы 9 или 11 не пропадает длительное время, большее допустимого, это свидетельствует о переполнении соответствующего отводящего конвейера рыбой. В связи с этим управляющий блок 12 передает сигналы останова на подающий конвейер 1, вспомогательный конвейер 4, реверсивный конвейер 14, отводящие конвейеры 15 и 16. В случае, если сигнал наличия рыбы поступает с датчика 7 в управляющий блок 12 до того момента, как рыба пересекла луч лазера между датчиками 8 и 9 или 10 и 11, управляющий блок 12 регулирует скорость движения подающего конвейера 1 и вспомогательного конвейера 4. Регулирование осуществляется таким образом, чтобы текущая тушка рыбы 2 поступала на реверсивный конвейер 14 после того, как перестал поступать сигнал наличия рыбы с датчиков 9 или 11, а реверсивный конвейер 14 успел остановиться и начать движение в новом направлении, соответствующем ориентации текущей тушки. Во время движения тушки рыбы 2 по поверхности реверсивного конвейера 14, а также по отводящим конвейерам 15 и 16 происходит подравнивание рыбы при помощи направляющих пластин 17, которые имеют такую форму, чтобы выравнивать рыбу вдоль направления движения. С отводящих конвейеров 15 и 16 рыба головой вперед подается для загрузки в рыборазделочные машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ РЫБЫ ГОЛОВОЙ В ОДНУ СТОРОНУ | 2016 |
|
RU2645974C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2017 |
|
RU2649340C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОГО РАЗДЕЛЕНИЯ И ОРИЕНТИРОВАНИЯ РЫБЫ | 2016 |
|
RU2645977C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2016 |
|
RU2645979C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2014 |
|
RU2573362C1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ | 2016 |
|
RU2628797C1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ | 2014 |
|
RU2582351C1 |
| УСТРОЙСТВО ДЛЯ ФИЛЕТИРОВАНИЯ РЫБЫ | 2006 |
|
RU2320178C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2006 |
|
RU2320177C1 |
| Устройство для открывания жаберных крышек у рыб | 1981 |
|
SU1011095A1 |
Изобретение относится к рыбной промышленности и может быть использовано на рыбообрабатывающих предприятиях. Устройство включает бак для рыбы и подающий конвейер, ориентированный наклонно и погруженный нижней частью в бак для рыбы. Устройство включает приспособление для разделения рыбы на два потока с противоположной ориентацией голов, расположенное между двумя отводящими конвейерами. Приспособление для разделения рыбы на два потока выполнено в виде реверсивного конвейера. Устройство снабжено вспомогательным конвейером, ориентированным горизонтально и установленным за подающим конвейером по ходу движения рыбы и оптическими датчиками наличия рыбы, установленными над вспомогательным и отводящими конвейерами. Устройство снабжено приспособлением для получения видеоизображения рыбы, установленным над вспомогательным конвейером, управляющим блоком, связанным с конвейерами, оптическими датчиками и приспособлением для получения видеоизображения рыбы. Изобретение обеспечивает надежность ориентирования рыбы. 1 ил.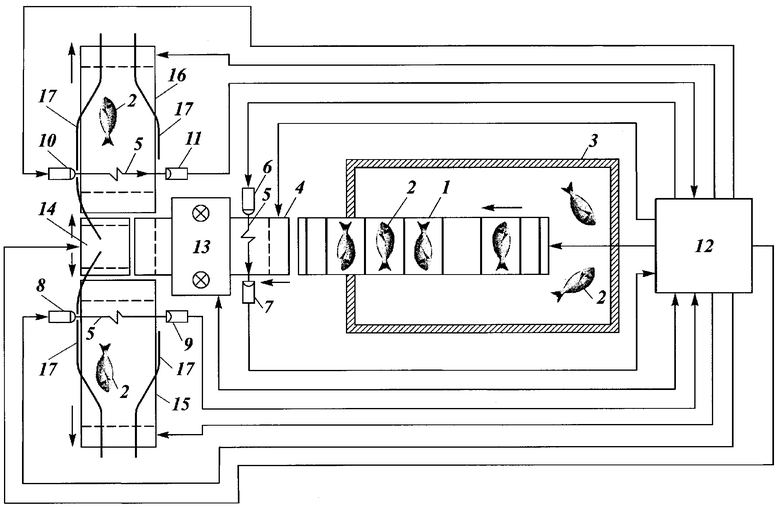
Устройство для ориентирования рыбы головой в одном направлении, включающее бак для рыбы, подающий конвейер, ориентированный наклонно и погруженный нижней частью в бак для рыбы, приспособление для разделения рыбы на два потока с противоположной ориентацией голов, расположенное между двумя отводящими конвейерами, отличающееся тем, что приспособление для разделения рыбы на два потока выполнено в виде реверсивного конвейера, устройство дополнительно снабжено вспомогательным конвейером, ориентированным горизонтально и установленным за подающим конвейером по ходу движения рыбы, оптическими датчиками наличия рыбы, установленными над вспомогательным и отводящими конвейерами, приспособлением для получения видеоизображения рыбы, установленным над вспомогательным конвейером, управляющим блоком, который связан с конвейерами, оптическими датчиками, приспособлением для получения видеоизображения рыбы.
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| 0 |
|
SU152554A1 | |
| 0 |
|
SU193339A1 |

