Изобретение относится к способу управления стабилизацией летательного аппарата вертолетного типа на канате и может быть использовано, в частности, для управления стабилизацией устройства для диагностики состояния воздушных линий электропередач (ВЛ) на силовом проводе или грозозащитном тросе.
Известен способ диагностики воздушных линий электропередач, предусматривающий использование летательного аппарата вертолетного типа для размещения на силовом проводе или грозозащитном тросе устройства для диагностики ВЛ и перемещения его через опоры ВЛ (патент № RU 2558002, опубликовано 27.07.2015).
В процессе своей работы устройство для диагностики ВЛ, снабженное летательным аппаратом вертолетного типа, сталкивается с проблемой стабилизации на проводе ВЛ, которая вызывается нарушением баланса сил, действующих на устройство, например, вследствие действия силы ветра. Настоящее изобретение призвано решить эту проблему.
Задачей заявляемого изобретения является обеспечение балансировки и устойчивого движения летательного аппарата вертолетного типа по канату (проводу, тросу).
Для решения поставленной задачи положение летательного аппарата вертолетного типа на канате регулируют путем задания разницы между скоростями вращения, по меньшей мере, двух пар пропеллеров, расположенных на летательном аппарате по обе стороны от каната, при этом изменение угла наклона летательного аппарата относительно плоскости, перпендикулярной плоскости движения летательного аппарата, производят путем изменения скорости вращения соответствующей пары пропеллеров, так что увеличение скорости вращения пары пропеллеров, расположенной со стороны наклона, а также уменьшение скорости вращения пары пропеллеров, расположенной с противоположной от наклона стороны, вызывает пропорциональное уменьшение угла наклона летательного аппарата, и наоборот, при этом пары пропеллеров выполняют связанными с каркасом либо жестко, либо при помощи шарниров - для обеспечения возможности их складывания.
На чертежах схематично изображен летательный аппарат вертолетного типа, в котором реализован предлагаемый способ управления стабилизацией:
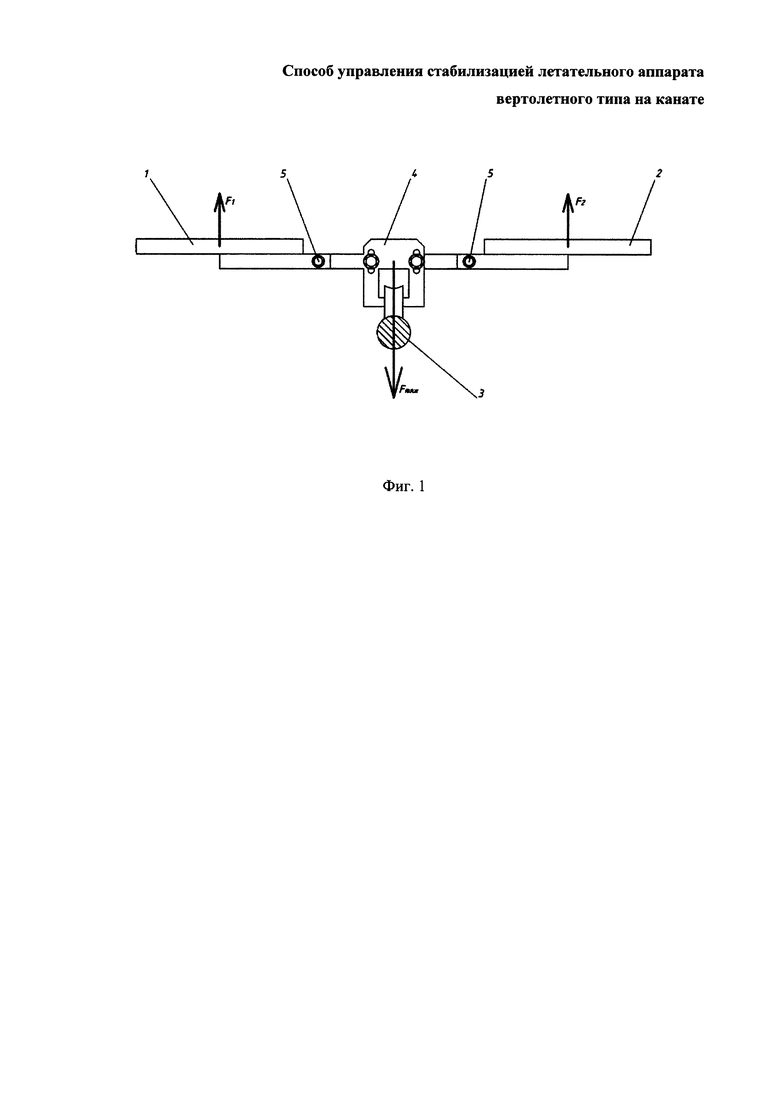
на фиг. 1 представлены силы, действующие на летательный аппарат вертолетного типа с включенными пропеллерами на канате без воздействия на него внешних сил (вид спереди);
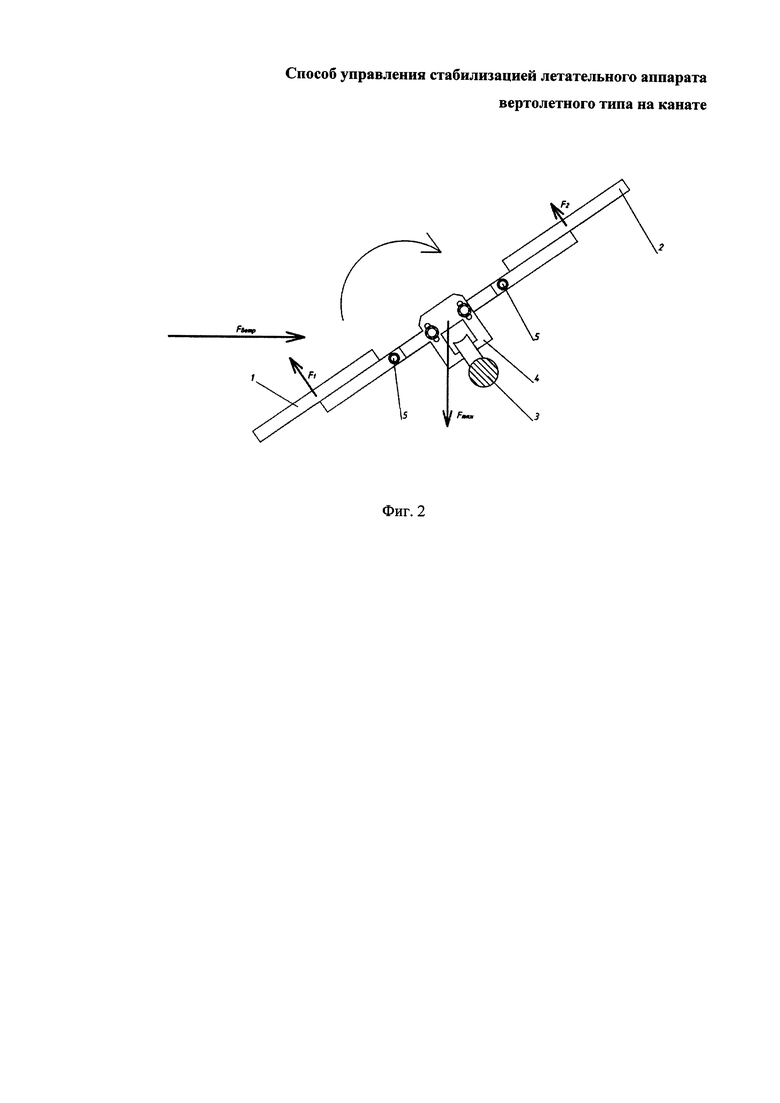
на фиг. 2 представлены силы, действующие на летательный аппарат вертолетного типа с включенными пропеллерами на канате при воздействии на него силы ветра (вид спереди);
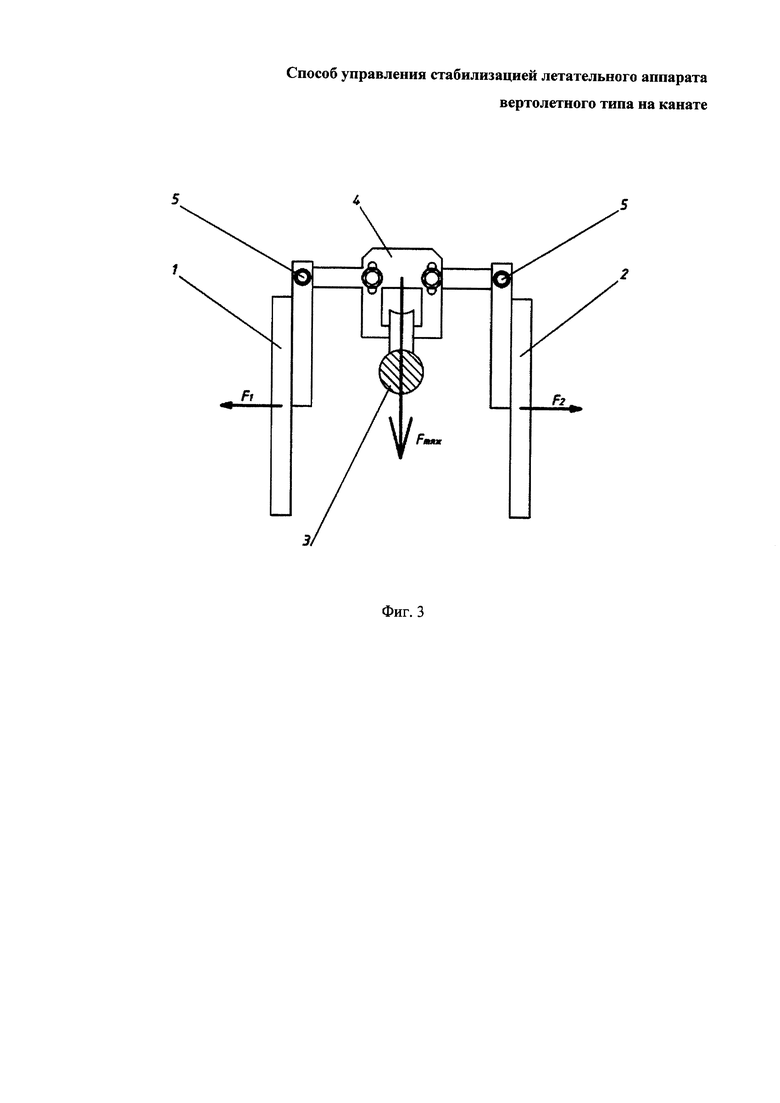
на фиг. 3 представлен летательный аппарат вертолетного типа с включенными пропеллерами, находящимися в сложенном состоянии, на канате без воздействия на него внешних сил (вид спереди);
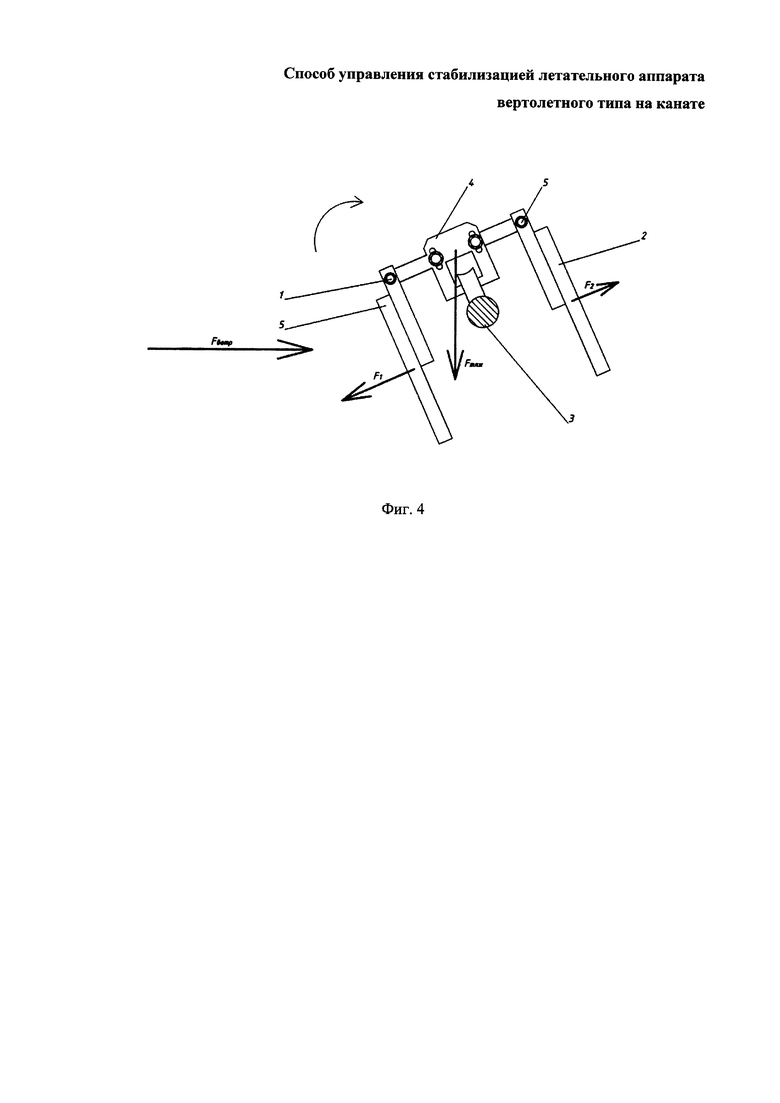
на фиг. 4 представлен летательный аппарат вертолетного типа с включенными пропеллерами, находящимися в сложенном состоянии, на канате при воздействии на него силы ветра (вид спереди).
Летательный аппарат вертолетного типа представляет собой, по меньшей мере, четырехпропеллерный вертолет с электронным устройством стабилизации, системой управления и электронным устройством определения координат (на чертеже не показаны). Четыре пропеллера располагаются парами 1 и 2 по обе стороны от каната 3 (провода ВЛ ил силового троса). Каждая пара 1 и 2 пропеллеров работает синхронно. На фиг. 1-4 видно по одному пропеллеру из каждой пары 1 и 2. Летальный аппарат вертолетного типа может быть выполнен в виде беспилотного автоматического летательного аппарата или аппарата на дистанционном управлении. К каркасу 4 летательного аппарата вертолетного типа крепится устройство для диагностики воздушных линий электропередач (на чертеже не показано). В качестве устройства для диагностики воздушных линий электропередач могут быть использованы видеокамера высокого разрешения с возможностью изменения фокуса в широких пределах, тепловизор для диагностики состояния силовых проводов, лазерный сканер для построения карты трассы и просеки, ультразвуковой сканер для грозозащитного троса и др. Каркас 4 снабжен шарнирами 5, позволяющими обеим парам 1 и 2 пропеллеров складываться.
Предлагаемый способ работает следующим образом.
Согласно настоящему изобретению положение летательного аппарата вертолетного типа на канате регулируют путем задания разницы между скоростями вращения, по меньшей мере, двух пар 1 и 2 пропеллеров, расположенных на летательном аппарате по обе стороны от каната 3 (провода ВЛ).
При нахождении летательного аппарата вертолетного типа на канате 3 с включенными пропеллерами при отсутствии ветра на него действует сила тяжести Fтяж и подъемные силы F1 и F2 двух пар 1 и 2 вращающихся пропеллеров (фиг. 1). В этом случае скорости вращения обеих пар 1 и 2 пропеллеров, а, соответственно, и их подъемные силы F1 и F2 одинаковы, что на фигуре 1 отражено одинаковой длиной стрелок. При воздействии на летательный аппарат силы ветра Fветр, аппарат начинает испытывать крен - наклон аппарата относительно плоскости, перпендикулярной плоскости движения летательного аппарата, так как стабилизирующая положение летательного аппарата сила тяжести Fтяж оказывается меньше силы ветра Fветр (фиг. 2). При достижении летательным аппаратом некоторого порогового значения угла наклона, используя заложенный в систему управления летательного аппарата алгоритм или при помощи дистанционного управления, начинают увеличивать скорость вращения той пары пропеллеров, которая расположена со стороны наклона (на рисунках это пара 1 пропеллеров), увеличивая тем самым подъемную силу этой пары пропеллеров и приводя аппарат в горизонтальное положение.
Уменьшение скорости вращения пары пропеллеров, расположенной с противоположной от наклона стороны (пара 2 пропеллеров), при сохранении текущей скорости вращения другой пары (поз.1) пропеллеров (или при отсутствии ее вращения), также вызовет разницу между скоростями вращения двух пар пропеллеров, расположенных на летательном аппарате по обе стороны от каната, что будет способствовать уменьшению угла наклона и выравниванию положения летательного аппарата на канате.
Предпочтительнее, чтобы при выравнивании положения летательного аппарата, обе пары пропеллеров работали одновременно на разных скоростях, чтобы избежать явления самораскачивания.
В процессе работы обе пары 1 и 2 пропеллеров автоматически или дистанционно могут быть сложены при помощи шарниров 5 (фиг. 3, 4). Такое положение пропеллеров позволит снизить центр тяжести летательного аппарата и уменьшить его габариты, улучшив тем самым характеристики устойчивости летательного аппарата на канате. При отсутствии воздействия ветра и при его возникновении работа способа управления стабилизацией летательного аппарата при помощи пар пропеллеров, находящихся в сложенном состоянии, аналогична работе способа, описанной выше.
Таким образом, заявляемое изобретение позволяет скомпенсировать действие внешних сил и способствовать стабильной работе летательного аппарата на канате.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ снятия объекта с каната и устройство для его осуществления | 2017 |
|
RU2713643C2 |
| Способ подъема груза на канат и устройство для его осуществления | 2020 |
|
RU2730813C1 |
| Устройство для диагностики воздушных линий электропередач | 2016 |
|
RU2646544C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ И ЕГО КОМПОНЕНТ | 2014 |
|
RU2558002C1 |
| Устройство для диагностики воздушных линий электропередач | 2017 |
|
RU2645774C1 |
| Устройство для диагностики воздушных линий электропередач | 2017 |
|
RU2639570C1 |
| Устройство для перемещения по канату (варианты) | 2016 |
|
RU2647106C1 |
| Устройство для диагностики воздушных линий электропередач | 2017 |
|
RU2645772C1 |
| Устройство для диагностики воздушных линий электропередач | 2020 |
|
RU2731846C1 |
| Устройство для диагностики воздушных линий электропередач | 2019 |
|
RU2717136C1 |
Изобретение относится к области электроэнергетики, в частности к способам управления стабилизацией устройств для диагностики состояния воздушных линий электропередач. Способ управления стабилизацией летательного аппарата вертолетного типа заключается в том, что положение летательного аппарата на канате, силовом проводе или грозозащитном тросе регулируют путем задания разницы между скоростями вращения по меньшей мере двух пар пропеллеров, расположенных на летательном аппарате по обе стороны от каната. При этом изменение угла наклона летательного аппарата относительно плоскости, перпендикулярной плоскости движения летательного аппарата, производят путем изменения скорости вращения соответствующей пары пропеллеров, так что увеличение скорости вращения пары пропеллеров, расположенной со стороны наклона, а также уменьшение скорости вращения пары пропеллеров, расположенной с противоположной стороны, вызывает пропорциональное уменьшение угла наклона летательного аппарата, и наоборот. Пары пропеллеров выполняют связанными с каркасом либо жестко, либо при помощи шарниров для обеспечения их складывания. Обеспечивается устойчивое движение летательного аппарата по канату. 4 ил.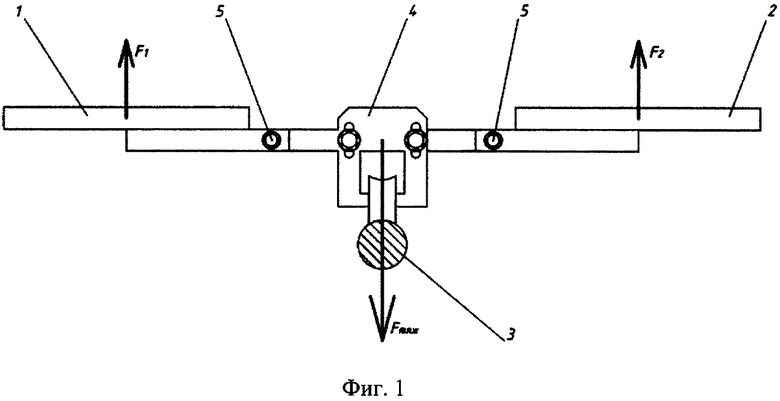
Способ управления стабилизацией летательного аппарата вертолетного типа на канате, заключающийся в том, что положение летательного аппарата вертолетного типа на канате регулируют путем задания разницы между скоростями вращения по меньшей мере двух пар пропеллеров, расположенных на летательном аппарате по обе стороны от каната, при этом изменение угла наклона летательного аппарата относительно плоскости, перпендикулярной плоскости движения летательного аппарата, производят путем изменения скорости вращения соответствующей пары пропеллеров, так что увеличение скорости вращения пары пропеллеров, расположенной со стороны наклона, а также уменьшение скорости вращения пары пропеллеров, расположенной с противоположной от наклона стороны, вызывает пропорциональное уменьшение угла наклона летательного аппарата, и наоборот, при этом пары пропеллеров выполняют связанными с каркасом либо жестко, либо при помощи шарниров - для обеспечения возможности их складывания.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-КОНВЕРТОПЛАН-АМФИБИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312795C2 |
| УСТРОЙСТВО ДИАГНОСТИКИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ И ЕГО КОМПОНЕНТ | 2014 |
|
RU2558002C1 |
| US 20060114122 A1, 01.06.2006. | |||

