Изобретение относится к области автоматизации и электроэнергетики, в частности к способу снятия объекта с линии электропередачи (ВЛ).
Известен способ диагностики воздушных линий электропередач, предусматривающий использование летательного аппарата вертолетного типа для размещения на силовом проводе или грозозащитном тросе устройства для диагностики ВЛ и перемещения его через опоры ВЛ (патент № RU 2558002, опубликовано 27.07.2015).
В процессе своей работы устройство для диагностики ВЛ, снабженное летательным аппаратом вертолетного типа, может столкнуться с аварийной ситуацией, когда необходимо срочно снять летательную платформу с каната или троса.
Задачей заявляемого изобретения является обеспечение снятия объекта с каната.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является обеспечение безопасного снятия объекта с каната, в частности диагностического или иного оборудования с ВЛ.
В части способа заявляемый технический результат достигается тем, что способ снятия объекта с каната заключается в снабжении объекта, расположенного на канате, устройством для снятия объекта с каната, содержащим, по меньшей мере, два механизма снятия объекта с каната, прикрепленных к объекту при помощи гибких элементов, отделении механизмов от объекта с разных сторон относительно каната, сбросе механизмов, креплении механизмов к фиксирующей поверхности на земле и регулировке подачи и натяжения гибких элементов для выведения объекта из равновесия.
В качестве гибкого элемента используют, например, леску, веревку, гибкий трос, шнур и т. п.
Регулировку подачи и натяжения гибкого элемента производят с использованием электродвигателя или двигателя внутреннего сгорания.
В части устройства заявляемый технический результат достигается тем, что устройство для снятия объекта с каната содержит, по меньшей мере, два механизма снятия объекта с каната, каждый из которых содержит корпус, внутри которого при помощи подшипников установлен вал, катушку, посаженную на вал, и гибкий элемент, намотанный на катушку, при этом один из концов каждого гибкого элемента связан с объектом, а корпус с внешней стороны снабжен крепежными элементами, предназначенными для крепления к объекту.
Крепление корпуса механизма производят с использованием механического и электрического замка.
Сущность изобретения поясняется чертежами, где:
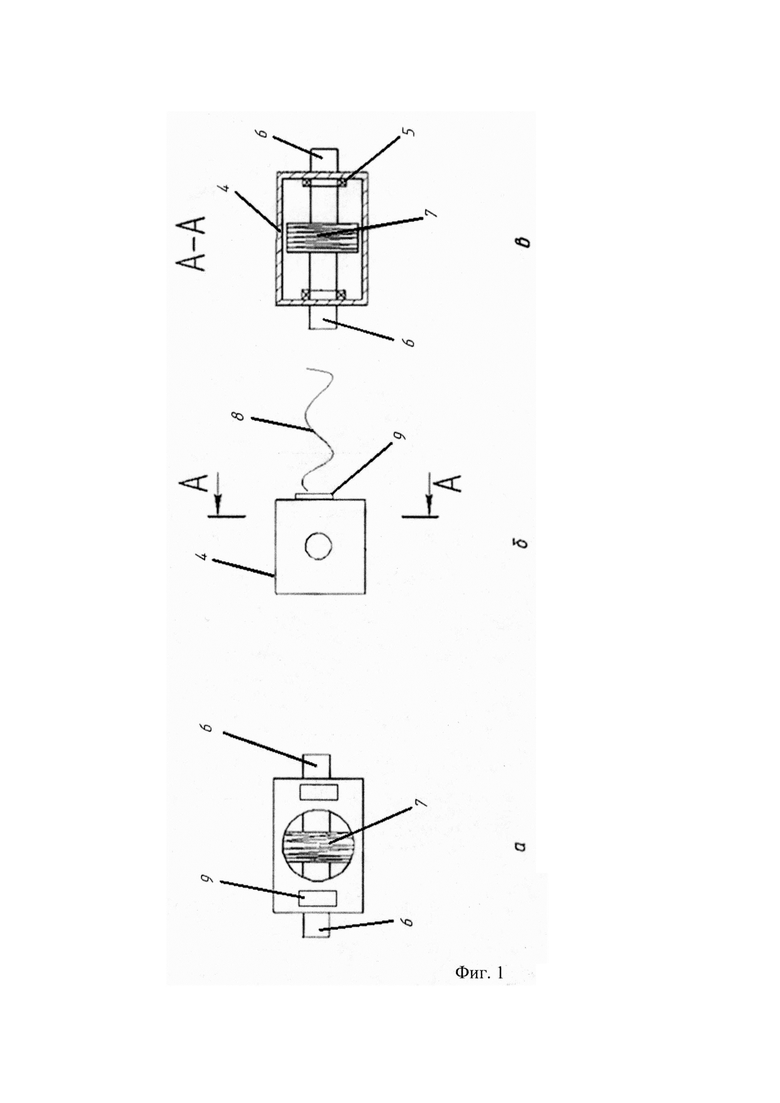
Фиг. 1 - механизм снятия объекта с каната (а - вид спереди, б – вид сбоку, с – вид в разрезе А-А).
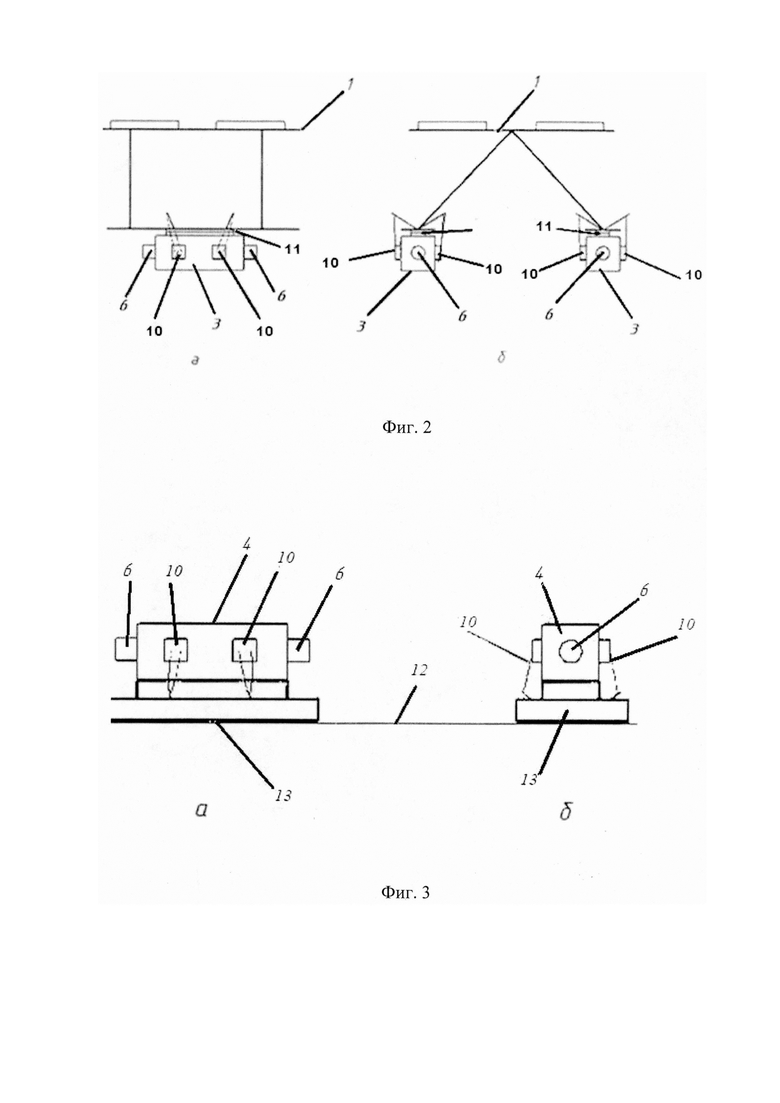
Фиг. 2 - вариант крепления устройства к объекту для снятия объекта с каната, с применением устройства для снятия объекта с каната, частный случай с использованием летательного аппарата вертолетного типа (а - вид спереди, б – вид сбоку).
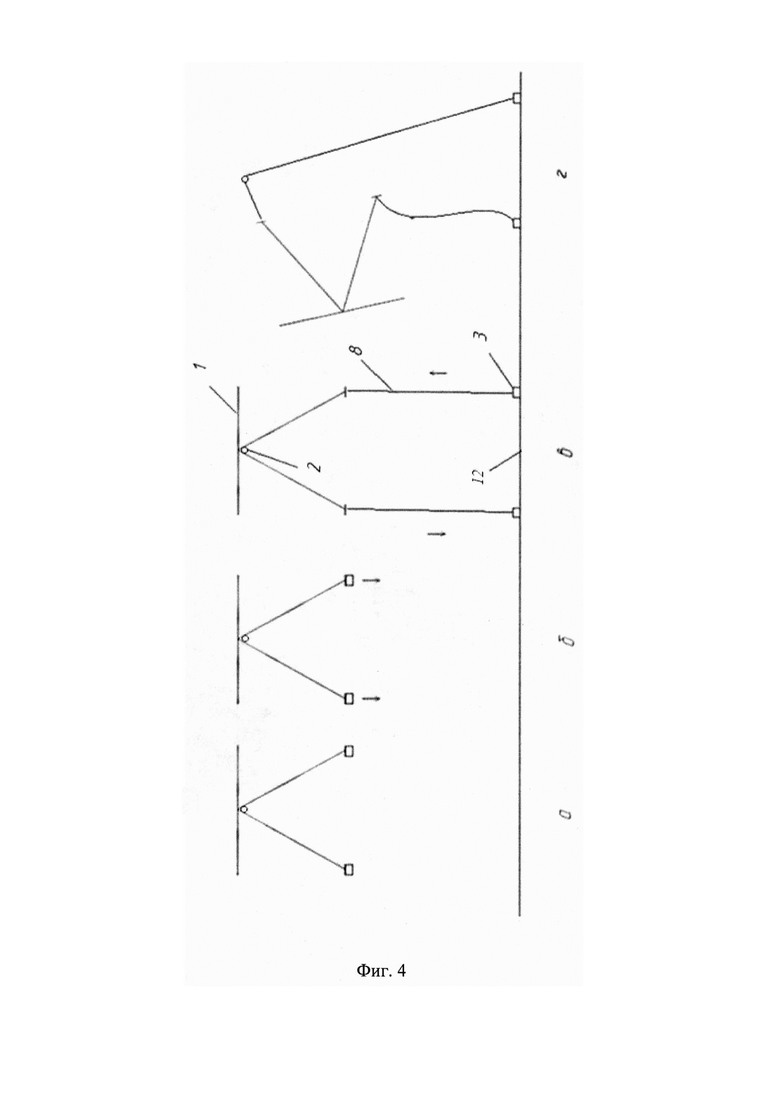
Фиг. 3 - вариант крепления устройства для снятия объекта с каната к земле (а - вид спереди, б – вид сбоку).
Фиг. 4 - иллюстрация снятия объекта с каната, частный случай с использованием летательного аппарата вертолетного типа.
Устройство для снятия объекта 1 с каната 2 содержит, по меньшей мере, два механизма 3 снятия объекта 1 с каната 2 (Фиг. 1), каждый из которых содержит корпус 4, внутри которого при помощи подшипников 5 установлен вал 6, катушку 7, посаженную на вал 6, и гибкий элемент 8, намотанный на катушку 7. Корпус 4 с внешней стороны снабжен крепежными элементами 9, предназначенными для крепления к объекту 1. Один из концов гибкого элемента 8 связан с объектом 1.
В качестве гибкого элемента 8 может быть использована леска, веревка, гибкий трос, шнур и т. п.
Механизмы 3 снятия объекта 1 с каната 2 устанавливаются на каркасе объекта 1 таким образом, чтобы при расположении объекта 1 на канате 2 механизмы 3 оказывались с разных сторон от каната 2.
Рассмотрим частный случай крепления устройства для снятия объекта 1 с каната 2 к объекту 1 (Фиг. 2). В качестве объекта выбран летательный аппарат вертолетного типа 1, размещенный на канате 2. Два механизма 3 снятия объекта 1 с каната 2 крепятся к каркасу летательного аппарата вертолетного типа 1 с двух сторон с помощью механического замка 10 и электрического замка 11, расположенных на внешней стороны корпуса 4. Один конец гибкого элемента 8 каждого механизма 3 крепится к летательному аппарату 1. Механический замок 10 предназначен для крепления механизма при открытом электрическом замке 11, для того чтобы избежать ложного сброса механизма при отсутствии питания при нахождении объекта 1 на земле 12. Допускается использование разных типов электрических замков. В данном случае электрический замок 11 закрывается при подаче питания и открывается при его отсутствии.
При креплении механизма 3 снятия объекта с каната 2 к земле 12 в качестве фиксирующей поверхности 13 может быть использована плита крепления (Фиг. 3), на которую ставится корпус 4, далее закрывают механические замки 10, далее плита ставится на поверхность земли 12. Также в качестве фиксирующей поверхности может выступать любая поверхность, например, стена, пол, грунт и др.
Заявляемый способ и устройство работают следующим образом.
Далее рассмотрен частный случай применения способа снятия объекта 1 с каната 2, а именно снятия летательного аппарата вертолетного типа 1 с провода ВЛ 2. Летательный аппарат вертолетного типа 1, находящийся на ВЛ 2, попадает в аварийную ситуацию (Фиг. 4а), например, теряет питание. В результате потери питания открывается электрический замок 11 и происходит отделение от летательного аппарата 1 и сброс механизмов 3 снятия объекта с каната 2 по обе стороны относительно ВЛ 2, на котором установлен летательный аппарат 1 (Фиг. 4б). Отделение механизмов 3 может осуществляться самопроизвольно, автоматически или вручную. При падении механизмов 3 разматываются гибкие элементы 8, прикрепленные к летательному аппарату 1. Механизмы 3 достигают поверхности земли 12. Обслуживающий персонал, закрепив оба механизма 3 к фиксирующей поверхности 13 и удерживая оба гибких элемента 8 (Фиг. 4в), тянет за один из них и выводит летательный аппарат 1 из состояния равновесия относительно ВЛ 2, контролируя подачу другого гибкого элемента 8, и тем самым производит опускание летательного аппарата 1 на землю 12 (Фиг. 4г). Регулировка подачи и натяжения гибкого элемента 8 может производиться с использованием электродвигателя или двигателя внутреннего сгорания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подъема груза на канат и устройство для его осуществления | 2020 |
|
RU2730813C1 |
| ДИРИЖАБЛЬ И ЯКОРЬ ДИРИЖАБЛЯ (ВАРИАНТЫ) | 2000 |
|
RU2174481C1 |
| УСТРОЙСТВО ОТДЕЛЕНИЯ, УДЕРЖАНИЯ И СБРОСА БУКСИРУЕМОЙ МИШЕНИ | 2009 |
|
RU2401974C1 |
| ПОДВОДНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2003 |
|
RU2302972C2 |
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
| Стыковочная система беспилотного летательного аппарата | 2018 |
|
RU2680555C1 |
| САМОРАСКРЫВАЮЩИЙСЯ ПАРАШЮТ С ПНЕВМАТИЧЕСКИМИ СТРОПАМИ | 2023 |
|
RU2813173C1 |
| Устройство для зарядки БПЛА от провода воздушной линии электропередачи | 2023 |
|
RU2811167C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678407C1 |
Изобретение относится к области автоматизации и электроэнергетики, в частности к способу снятия объекта с линии электропередачи (ВЛ). Способ снятия объекта с каната заключается в снабжении объекта, расположенного на канате, устройством для снятия объекта с каната, содержащим, по меньшей мере, два механизма снятия объекта с каната, прикрепленных к объекту при помощи гибких элементов, отделении механизмов от объекта с разных сторон относительно каната, сбросе механизмов, креплении механизмов к фиксирующей поверхности на земле и регулировке подачи и натяжения гибких элементов для выведения объекта из равновесия. Устройство для снятия объекта с каната содержит, по меньшей мере, два механизма снятия объекта с каната, каждый из которых содержит корпус, внутри которого при помощи подшипников установлен вал, катушку, посаженную на вал, и гибкий элемент, намотанный на катушку, при этом один из концов каждого гибкого элемента связан с объектом, а корпус с внешней стороны снабжен крепежными элементами, предназначенными для крепления к объекту. Технический результат – обеспечение безопасного снятия объекта с каната, в частности диагностического или иного оборудования с ВЛ. 2 н. и 3 з.п. ф-лы, 4 ил.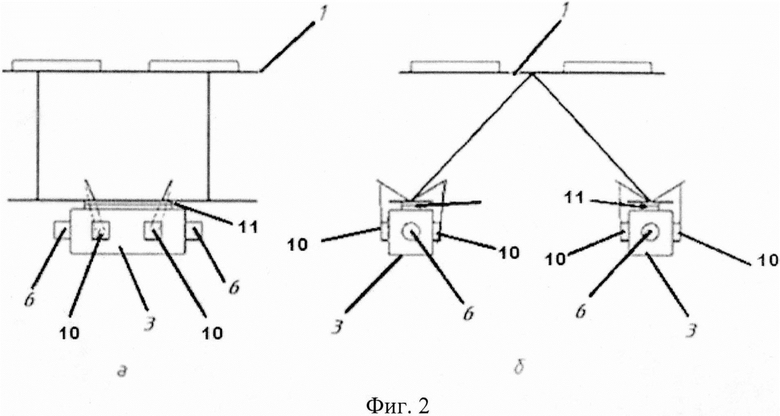
1. Способ снятия объекта с каната, заключающийся в снабжении объекта, расположенного на канате, устройством для снятия объекта с каната, содержащим, по меньшей мере, два механизма снятия объекта с каната, прикрепленных к объекту при помощи гибких элементов, отделении механизмов от объекта с разных сторон относительно каната, сбросе механизмов, креплении механизмов к фиксирующей поверхности на земле и регулировке подачи и натяжения гибких элементов для выведения объекта из равновесия.
2. Способ снятия объекта с каната по п. 1, отличающийся тем, что в качестве гибкого элемента используют, например, леску, веревку, гибкий трос, шнур и т.п.
3. Способ снятия объекта с каната по п.1, отличающийся тем, что регулировку подачи и натяжения гибкого элемента производят с использованием электродвигателя или двигателя внутреннего сгорания.
4. Устройство для снятия объекта с каната, содержащее, по меньшей мере, два механизма снятия объекта с каната, каждый из которых содержит корпус, внутри которого при помощи подшипников установлен вал, катушку, посаженную на вал, и гибкий элемент, намотанный на катушку, при этом один из концов каждого гибкого элемента связан с объектом, а корпус с внешней стороны снабжен крепежными элементами, предназначенными для крепления к объекту.
5. Устройство снятия объекта с каната по п. 4, отличающееся тем, что крепление корпуса механизма производят с использованием механического и электрического замка.
| US 8640895 B2, 04.02.2014 | |||
| RU 96105271 A, 20.06.1998 | |||
| Монтажное устройство для перемещения по проводам воздушной линии электропередачи | 1985 |
|
SU1282249A1 |
| US 5114026 A, 19.05.1992. | |||

