Предлагаемое изобретение относится к автоматическому регулированию и предназначено для использования в различных системах автоматики.
Известны регулирующие устройства, содержащие интегратор и усилитель, подключенные к входам сумматора, выход которого соединен с вторым усилителем, и нормально разомкнутый управляемый ключ (Денисенко В.В. ПИД-регуляторы: вопросы реализации / Современные технологии автоматизации, 2007, №4. - С. 86-97, рис. 6; Гельднер К., Кубик С. Нелинейные системы управления. М.: Мир, 1987, с. 265-266, рис. 164).
В известных устройствах обеспечивается формирование регулирующего воздействия для объекта, пропорциональное сумме входного сигнала рассогласования системы и интеграла от него:
 ,
,
где kп - коэффициент пропорциональности; Tи - постоянная времени,
при ограничении выходного сигнала интегратора для обеспечения устойчивости и снижения колебаний в системе.
При использовании таких устройств обеспечивается быстрая реакция системы на изменения рассогласования за счет постоянной составляющей, высокая точность регулирования в установившихся режимах, обеспечиваемая интегральной составляющей, и ограничение выходного сигнала интегратора. Однако при управлении инерционными объектами при больших нагрузках известные устройства не обеспечивают высокое качество регулирования, что проявляется в появлении статической ошибки в системе. При ограничении выходного сигнала интегратора, предусмотренного для снижения колебаний и обеспечения устойчивости, изменение сигнала ошибки не приводит к изменению выходного сигнала интегратора и, следовательно, не происходит астатическое регулирование. В результате этого в системе имеет место статическая ошибка. Таким образом, недостаток известных регулирующих устройств - низкое качество регулирования при больших нагрузках.
Таким образом, недостаток известных пропорционально-интегральных регуляторов - низкое качество регулирования в автоматических системах.
Из известных устройств наиболее близким по достигаемому результату к предлагаемому техническому решению является пропорционально-интегральный регулятор, содержащий нелинейный элемент с характеристикой
 ,
,
где x - входной сигнал устройства; α - коэффициент пропорциональности; х0 - пороговое значение,
вход которого является входом устройства, а выход через интегратор соединен с первым входом сумматора, выход которого подключен к входу усилителя, выход которого служит выходом устройства, при этом второй вход сумматора соединен с входом устройства (Патент РФ №2573731, МПК G05B 11/36. - Опубл. 27.06.2016).
В известном устройстве производится уменьшение выходного сигнала интегратора при переходных процессах. Вследствие малого коэффициента передачи нелинейного элемента в течение переходного процесса, т.е. при больших рассогласованиях, его выходной сигнал изменяется медленно, благодаря чему насыщение интегратора не происходит.
Однако при известном способе работы пропорционально-интегрального регулятора качество переходных процессов остается низким. Это объясняется тем, что при переходных процессах снижается коэффициент передачи интегрирующей части регулирующего устройства, следовательно, снижается его общий коэффициент передачи.
Таким образом, недостаток известного способа - низкое качество работы, проявляющееся в снижении качества регулирования при переходных процессах.
Цель предлагаемого изобретения - повышение качества работы пропорционально-интегрального регулятора путем коррекции коэффициента передачи при переходных процессах.
Поставленная цель достигается тем, что в известный пропорционально-интегральный регулятор, содержащий нелинейный элемент с характеристикой
 ,
,
где x - входной сигнал устройства; α - коэффициент пропорциональности; х0 - пороговое значение,
вход которого является входом устройства, а выход через интегратор соединен с первым входом сумматора, выход которого подключен к входу усилителя, выход которого служит выходом устройства, дополнительно введены последовательно соединенные второй нелинейный элемент с характеристикой
 ,
,
где β - коэффициент пропорциональности, β>1,
и фильтр нижних частот, при этом вход второго нелинейного элемента соединен с входом устройства, а выход фильтра нижних частот подключен к второму входу сумматора.
По сравнению с наиболее близким аналогичным техническим решением предлагаемый пропорционально-интегральный регулятор имеет следующие отличительные признаки:
- второй нелинейный элемент с характеристикой
где β - коэффициент пропорциональности, β>1;
и фильтр нижних частот.
Следовательно, заявляемый способ работы пропорционально-интегрального регулятора соответствует требованию «новизна».
По каждому отличительному существенному признаку проведен поиск известных технических решений в области автоматического управления.
Нелинейные элементы с характеристикой
где β - коэффициент пропорциональности, β>1; х0 - пороговое значение, в известных технических решениях не обнаружены.
Фильтры нижних частот используются в известных технических решениях аналогичного назначения, например, для сглаживания сигналов в дифференцирующих устройствах (Денисенко В.В. ПИД-регуляторы: вопросы реализации / Современные технологии автоматизации, 2007, №4. - С. 86-97). При этом использование фильтров нижних частот на выходах нелинейных элементов в канале пропорциональной составляющей не обнаружено.
Следовательно, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого технического решения заключается в следующем. Регулирующее воздействие на выходе устройства формируется пропорционально сумме двух сигналов: интеграла от выходного сигнала первого нелинейного элемента и преобразованного фильтром нижних частот 3 выходного сигнала второго нелинейного элемента.
При этом вследствие малого значения сигнала на входе интегратора в течение переходного процесса, т.е. при больших рассогласованиях, его выходной сигнал изменяется медленно, благодаря чему насыщение интегратора не происходит. При длительном действии больших нагрузок статическая ошибка всегда интегрируется интегратором, т.е. происходит астатическое регулирование. При переходных процессах, т.е. при больших ошибках, происходит увеличение коэффициента передачи пропорциональной части регулирующего устройства, благодаря чему компенсируется снижение общего коэффициента передачи регулирующего устройства.
В результате обеспечивается высокая точность автоматической системы в установившихся режимах и высокое качество регулирования при переходных процессах.
Следовательно, предлагаемое изобретение соответствует требованию «положительный эффект».
Сущность предлагаемого технического решения поясняется чертежами.
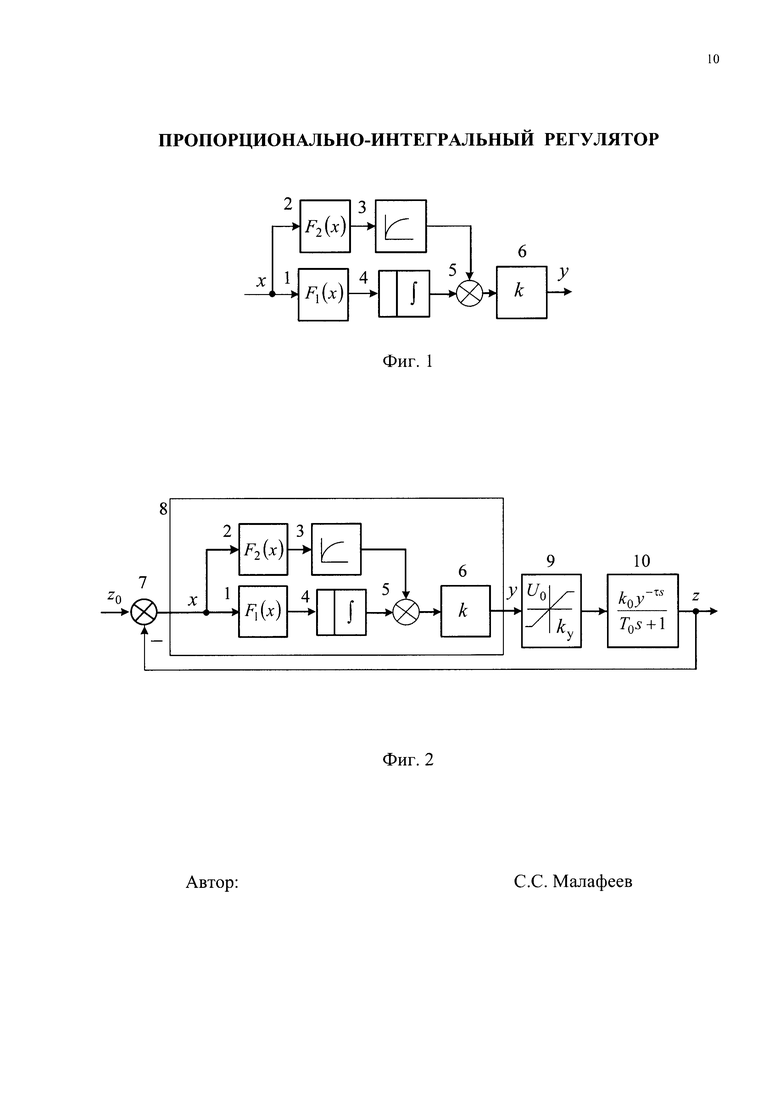
На фиг. 1 приведена функциональная схема предлагаемого пропорционально-интегрального регулирующего устройства, поясняющая сущность изобретения. На чертеже обозначено: 1 - нелинейный элемент с характеристикой
2 - второй нелинейный элемент с характеристикой
3 - фильтр нижних частот; 4 - интегратор; 5 - сумматор; 6 - усилитель.
В пропорционально-интегральном регуляторе входы первого нелинейного элемента 1 и второго нелинейного элемента 2 объединены и являются входом устройства, выход нелинейного элемента 1 через интегратор 4 соединен с первым входом сумматора 5, второй вход которого через фильтр нижних частот 3 соединен с выходом второго нелинейного элемента 2, а выход подключен к входу усилителя 6, выход которого служит выходом устройства.
Пропорционально-интегральный регулятор работает следующим образом. Входной сигнал x(t), пропорциональный ошибке регулирования, поступает на входы первого и второго нелинейных элементов 1 и 2.
Первый нелинейный элемент 1 выполняет функцию регулятора коэффициента передачи интегратора входного сигнала. При малых входных сигналах  его коэффициент передачи равен k1=1, при больших входных сигналах
его коэффициент передачи равен k1=1, при больших входных сигналах  его коэффициент уменьшается пропорционально
его коэффициент уменьшается пропорционально  . Второй нелинейный элемент 2 предназначен для переключения коэффициента передачи пропорциональной части регулятора. При малых входных сигналах коэффициент передачи второго нелинейного элемента равен k2=1, при больших значениях входного сигнала коэффициент передачи второго нелинейного элемента 2 равен k2=β; β>1. Фильтр нижних частот 3 обеспечивает безударное переключение коэффициента передачи регулирующего устройства.
. Второй нелинейный элемент 2 предназначен для переключения коэффициента передачи пропорциональной части регулятора. При малых входных сигналах коэффициент передачи второго нелинейного элемента равен k2=1, при больших значениях входного сигнала коэффициент передачи второго нелинейного элемента 2 равен k2=β; β>1. Фильтр нижних частот 3 обеспечивает безударное переключение коэффициента передачи регулирующего устройства.
Выходной сигнал интегратора 4 суммируется с выходным сигналом фильтра нижних частот 3 с помощью сумматора 5 и масштабируется усилителем 6.
Следовательно, передаточная функция пропорционально-интегрального регулятора может быть представлена в виде
 ,
,
где k2(х) - коэффициент передачи пропорциональной составляющей;
k1(х) - коэффициент передачи интегральной составляющей,
Т - постоянная времени интегратора 4;
k - коэффициент передачи усилителя 5.
При малой ошибке регулирования  выходной сигнал первого нелинейного элемента 1 имеет значение u1=1, при этом k1(х)=1. Выходной сигнал второго нелинейного элемента 2 имеет значение u2=1, при этом k2(х)=1. Устройство в этом случае представляет собой обычный классический пропорционально-интегральный регулятор с передаточной функцией:
выходной сигнал первого нелинейного элемента 1 имеет значение u1=1, при этом k1(х)=1. Выходной сигнал второго нелинейного элемента 2 имеет значение u2=1, при этом k2(х)=1. Устройство в этом случае представляет собой обычный классический пропорционально-интегральный регулятор с передаточной функцией:
Так как работа системы при малой ошибке регулирования  соответствует установившимся процессам (низкие частоты), то в этом случае регулирующее устройство представляет собой обычный пропорционально-интегральный регулятор, обеспечивающий астатическое регулирование в системе. В установившемся режиме ошибка регулирования стремится к 0.
соответствует установившимся процессам (низкие частоты), то в этом случае регулирующее устройство представляет собой обычный пропорционально-интегральный регулятор, обеспечивающий астатическое регулирование в системе. В установившемся режиме ошибка регулирования стремится к 0.
Следовательно, при установившихся режимах нелинейные характеристики элементов 1 и 2 не оказывают влияния на работу системы.
В случае превышения абсолютным значением ошибки регулирования порогового уровня х0, например при изменении сигнала задания или возмущения, выходной сигнал первого нелинейного элемента 1 уменьшается пропорционально величине  . В результате этого происходит уменьшение сигнала на входе интегратора 4. Коэффициент передачи интегральной составляющей уменьшается. Следствием этого является предотвращение насыщения интегратора и улучшение качества переходных процессов. Выходной сигнал второго нелинейного элемента 2 увеличивается на величину, определяемую β. В результате этого происходит увеличение пропорциональной составляющей регулирующего воздействия и, следовательно, повышение быстродействия системы. При снижении входного сигнала (рассогласования) происходит уменьшение коэффициента передачи пропорциональной составляющей до значения k2(x)=1.
. В результате этого происходит уменьшение сигнала на входе интегратора 4. Коэффициент передачи интегральной составляющей уменьшается. Следствием этого является предотвращение насыщения интегратора и улучшение качества переходных процессов. Выходной сигнал второго нелинейного элемента 2 увеличивается на величину, определяемую β. В результате этого происходит увеличение пропорциональной составляющей регулирующего воздействия и, следовательно, повышение быстродействия системы. При снижении входного сигнала (рассогласования) происходит уменьшение коэффициента передачи пропорциональной составляющей до значения k2(x)=1.
Таким образом, при предлагаемом способе работы пропорционально-интегрального регулятора осуществляется быстрая отработка большой ошибки регулирования без насыщения интегратора и астатическое регулирование при любых значениях рассогласования. Благодаря этому обеспечивается высокое качество регулирования, а именно, точность и быстродействие.
С целью подтверждения положительного эффекта, достигаемого с помощью предлагаемого технического решения, было проведено компьютерное моделирование процессов в автоматической системе с предложенным способом работы пропорционально-интегрального регулятора.
Структурная схема системы показана на фиг. 2, где обозначено: 7 - элемент сравнения; 8 - регулирующее устройство; 9 - исполнительное устройство с коэффициентом передачи kу и ограничением выходного воздействия на уровне U0, 10 - объект управления с передаточной функцией:
На фиг. 2 обозначено: z0 - сигнал задания; z - выходной сигнал системы.
При моделировании были приняты следующие параметры объекта и системы управления: k0=2; T0=0,6 с; kу=1; U0=12 В; α=1; β=2. Моделирование системы проводилось при различных значениях времени запаздывания τ0:τ0=1,2 с и τ0=1,8 с. Постоянная времени интегратора 5 равна T=0,5 с; пороговое значение функционального элемента 1 выбрано равным х0=0,05 В, коэффициент передачи и постоянная времени фильтра нижних частот 3 равны соответственно: k3=2; T3=1,5 с.
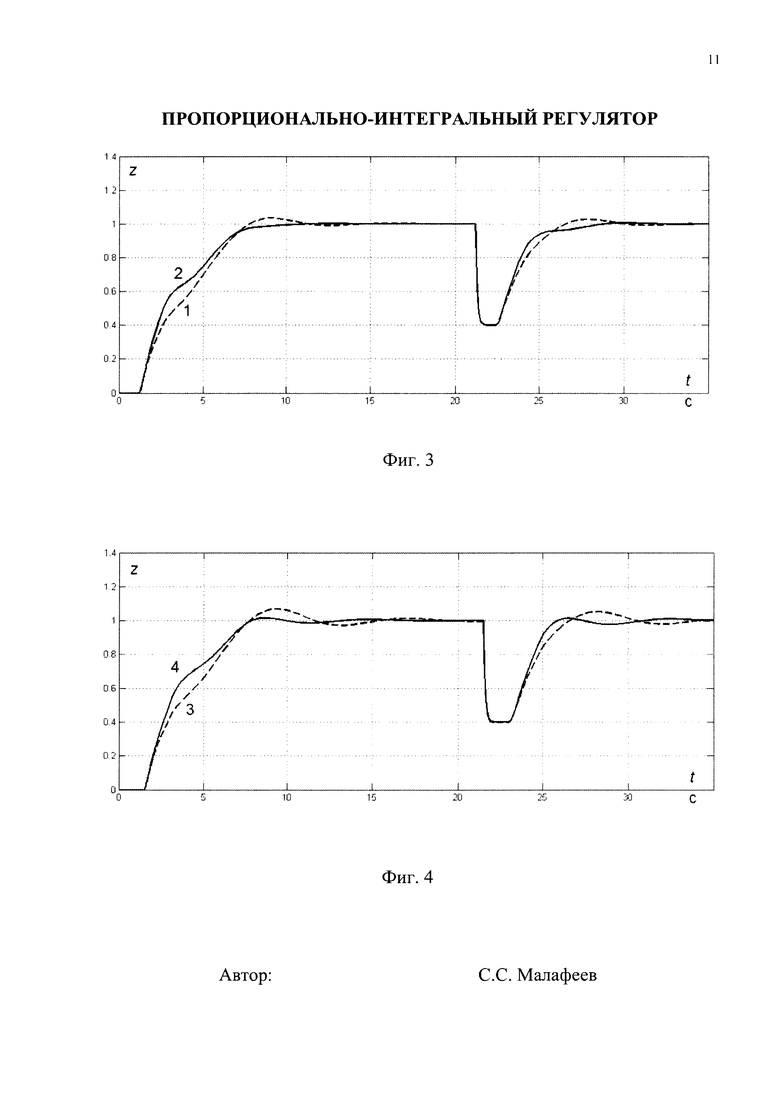
На фиг. 3 приведены диаграммы переходных процессов в системе при τ0=1,2 с для выходного сигнала z при ступенчатом изменении сигнала задания в момент t=0 и ступенчатом изменении нагрузки при t=20 с:
- линия 1 (пунктирная): переходный процесс в системе с регулирующим устройством с уменьшением коэффициента передачи интегральной части регулирующего устройства при больших сигналах рассогласования (прототип);
- линия 2 (сплошная): переходный процесс в системе с предлагаемым регулирующим устройством.
В системе с известным пропорционально-интегральным регулятором (прототипом) перерегулирование составляет 6% (линия 1), в системе с предлагаемым регулирующим устройством перерегулирование отсутствует (линия 2). Время регулирования в случае использования прототипа составляет 10 с, в предлагаемом устройстве оно равно 7 с.
На фиг. 4 приведены аналогичные графики переходных процессов при сохраненных настройках и τ0=1,8 с и включении нагрузки при t=20 с. В системе с известным пропорционально-интегральным регулятором (прототипом) перерегулирование составляет 9%, время регулирования 12 с (пунктирная линия 3), в системе с предлагаемым пропорционально-интегральным регулятором перерегулирование равно 2%, время регулирования 7 с (сплошная линия 4).
При ступенчатом изменении нагрузки в обоих случаях известное и предлагаемое устройства имеют близкие показатели качества регулирования, но при использовании предлагаемого устройства переходный процесс имеет меньшую колебательность.
Таким образом, предлагаемое техническое решение обеспечивает повышение качества регулирования: снижение колебательности переходного процесса и перерегулирования и уменьшение времени регулирования.
Важным достоинством предлагаемого регулирующего устройства является то, что оно может быть легко реализовано как аппаратным, так и программным способами.
Использование предлагаемого технического решения в различных системах автоматики позволит повысить качество процессов управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ И ДИАГНОСТИКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ | 1999 |
|
RU2150727C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| Устройство для возбуждения синхронного двигателя | 1990 |
|
SU1739470A1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2065660C1 |
Изобретение относится к автоматическому регулированию. Входной сигнал регулятора преобразуется двумя нелинейными элементами 1 и 2, которые имеют характеристики соответственно:
 и
и 
где x - входной сигнал устройства; α и β коэффициенты пропорциональности, β>1; х0 - пороговое значение. Регулирующее воздействие на выходе устройства формируется пропорционально сумме двух сигналов: интеграла от выходного сигнала первого нелинейного элемента 1 и преобразованного фильтром нижних частот 3 выходного сигнала второго нелинейного элемента 2. При этом вследствие малого значения сигнала на входе интегратора 4 в течение переходного процесса, то есть при больших рассогласованиях, его выходной сигнал изменяется медленно, благодаря чему насыщение интегратора 4 не происходит. При длительном действии больших нагрузок статическая ошибка всегда интегрируется интегратором 4, то есть происходит астатическое регулирование. При переходных процессах, то есть при больших ошибках, происходит увеличение коэффициента передачи пропорциональной части регулирующего устройства, благодаря чему компенсируется снижение общего коэффициента передачи регулирующего устройства. В результате обеспечивается высокая точность автоматической системы в установившихся режимах и высокое качество регулирования при переходных процессах. 4 ил.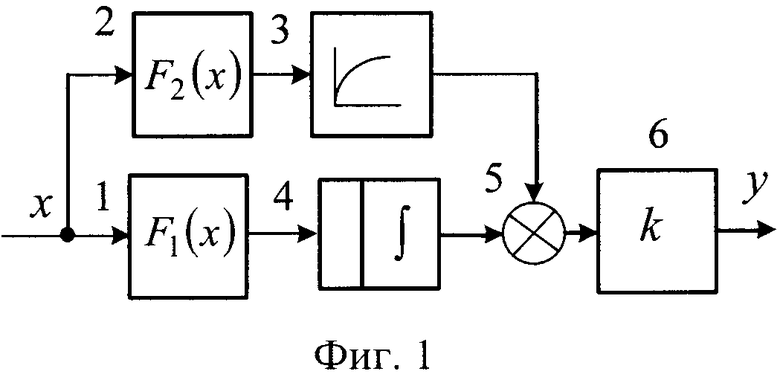
Пропорционально-интегральный регулятор, содержащий нелинейный элемент с характеристикой
 ,
,
где x - входной сигнал устройства; α - коэффициент пропорциональности; х0 - пороговое значение,
вход которого является входом устройства, а выход через интегратор соединен с первым входом сумматора, выход которого подключен к входу усилителя, выход которого служит выходом устройства, отличающийся тем, что дополнительно введены последовательно соединенные второй нелинейный элемент с характеристикой
 ,
,
где β - коэффициент пропорциональности, β>1,
и фильтр нижних частот, при этом вход второго нелинейного элемента соединен с входом устройства, а выход фильтра нижних частот подключен к второму входу сумматора.
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| US 9024566 B2, 05.05.2015 | |||
| US 5625551 A, 29.04.1997. | |||

