Предлагаемое изобретение относится к автоматизированному электроприводу и предназначено для использования в составе промышленных технологических комплексов прокатного производства.
Известны электроприводы, содержащие электродвигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена к выходу усилителя мощности, вход которого соединен с выходом регулятора тока, подключенного суммирующим входом к выходу регулятора скорости, а вычитающим входом к выходу датчика тока, задатчик и датчик угловой скорости двигателя, выходы которых подключены соответственно к суммирующему и вычитающему входам элемента сравнения, выход которого соединен с входом регулятора скорости, и датчик напряжения, подключенный к якорной обмотке двигателя (Патент РФ №2065660. Опубл. 20.08.96, Бюл. №23, МПК H02P 5/06; Тиристорные электроприводы постоянного тока / А.Г. Иванов и др. - Электротехника, 2001, №2, с.10-15, рис.3; Пiвняк Г.Г., Бешта О.С., Фiлькиiн М.П. Автоматизировании електропривод у прокатному виробництвi. - Днiпропетровськ, Нацiональний гiрничий унiверситет. - 2008, с.121, рис.4.11).
В известных электроприводах осуществляется регулирование скорости и подчиненное регулирование тока двигателя. При работе электропривода при захвате слитка в результате приложения нагрузки происходит раскрытие люфта в механической передаче, вызывающее удар и приводящее к увеличению динамических нагрузок.
Следовательно, недостатком известных технических решений являются высокие динамические нагрузки при прокатке металлов.
Из известных технических решений наиболее близким к предлагаемому по достигаемому результату является электропривод прокатного стана, содержащий двигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена к выходу усилителя мощности, вход которого соединен с выходом регулятора тока, подключенного первым суммирующим входом к выходу регулятора скорости, а вычитающим входом к выходу датчика тока, выходы задатчика и датчика угловой скорости двигателя подключены соответственно к суммирующему и вычитающему входам первого элемента сравнения, выход которого через блок ограничения подключен к первому суммирующему входу регулятора скорости и непосредственно соединен с первым входом нелинейного функционального преобразователя, реализующего функцию

где ε, u2 - первый и второй входные сигналы; Ue - напряжение, соответствующее уровню логической единицы,
второй вход которого через масштабирующий усилитель подключен к выходу задатчика скорости, а выход соединен с управляющим входом управляемого ключа, присоединенного между суммирующим входом регулятора скорости и выходом второго элемента сравнения, суммирующий вход которого подключен к выходу задатчика скорости, а вычитающий вход соединен с выходом датчика напряжения, подключенного к якорной обмотке двигателя (Патент РФ №2254665, МПК H02P 5/06. - Опубл. 20.06.2005, Бюл. №17).
В известном электроприводе осуществляется регулирование скорости и напряжения на якорной обмотке и подчиненное регулирование тока двигателя. При работе электропривода в результате приложения нагрузки происходит раскрытие люфта в механической передаче, вызывающее удар и приводящее к увеличению динамических нагрузок.
Следовательно, недостатком известных технических решений являются высокие динамические нагрузки при прокатке металлов.
Цель предлагаемого изобретения - снижение динамических нагрузок при прокатке металлов.
Поставленная цель достигается тем, что в известный электропривод, содержащий двигатель постоянного тока независимого возбуждения, якорная обмотка которого через датчик тока подключена к выходу усилителя мощности, вход которого соединен с выходом регулятора тока, подключенного суммирующим входом к выходу регулятора скорости, а вычитающим входом к выходу датчика тока, выходы задатчика и датчика угловой скорости двигателя подключены соответственно к суммирующему и вычитающему входам первого элемента сравнения, выход которого соединен с объединенными входом блока ограничения и первым входом нелинейного функционального преобразователя, второй вход которого подключен через масштабирующий усилитель к выходу задатчика, суммирующий и вычитающий входы второго элемента сравнения подключены к выходам соответственно задатчика скорости и датчика напряжения, а выход через первый управляемый ключ соединен с одним из входов сумматора, другой вход которого подключен к выходу блока ограничения, а выход соединен с входом регулятора скорости, управляющий вход управляемого ключа соединен с выходом нелинейного функционального преобразователя; вход датчика напряжения подключен к якорной обмотке двигателя дополнительно введены датчик скорости прокатки, датчик перемещений слитка, управляемый таймер, формирующий задержку длительностью

где τ0 - константа; V - линейная скорость слитка на входе в клеть, L - расстояние от датчика линейных перемещений до рабочей клети, формирователь импульсов, а регулятор тока оснащен вторым суммирующим входом, соединенным через формирователь импульсов с выходом управляемого таймера, управляющий и установочный входы которого соединены с выходами соответственно датчика скорости прокатки и датчика перемещений слитка.
По сравнению с наиболее близким аналогичным техническим решением предлагаемый электропривод прокатного стана имеет следующие новые признаки:
- датчик скорости прокатки;
- датчик перемещений слитка;
- управляемый таймер;
- формирователь импульсов;
- регулятор тока оснащен вторым суммирующим входом.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения обеспечивается снижение динамических нагрузок и повышение качества регулирования скорости за счет снижения динамической нагрузки, вызванной раскрытием люфта, путем упреждающего увеличения электромагнитного момента приводного двигателя постоянного тока. Увеличение электромагнитного момента осуществляется путем подключения к второму суммирующему входу регулятора тока сигнала амплитудой U0 и длительностью Δτ с выхода формирователя импульсов по сигналу управляемого таймера за интервал времени τ0 до приложения нагрузки. В результате этого инициализируются переходные процессы в якорной обмотке электропривода, которые приводят к кратковременному росту тока якоря и, соответственно, электромагнитного момента. Захват слитка происходит при повышенном моменте, развиваемом двигателем. Раскрытия люфта в этом случае не происходит, а колебания скорости не развиваются. Таким образом, динамическая нагрузка снижается, качество процессов регулирования повышается.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Известны регуляторы тока, оснащенные несколькими входами (суммирующими и вычитающими) в электроприводах (Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева и А.В. Шинянского. - М.: Энергоатомиздат, 1983, с.246-247, рис.7.34; Тиристорные электроприводы постоянного тока / А.Г. Иванов и др. - Электротехника, 2001, №2, с.10-15, рис.3).
В известных технических решениях и предлагаемом устройстве регуляторы с несколькими входами выполняют аналогичные функции.
Известны формирователи импульсов в электрических приводах (Перельмуттер В.М., Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. - М.: Энергоатомиздат, 1988, с.40-45). В известных устройствах формирователи импульсов используются для управления тиристорами. В предлагаемом техническом решении формирователь импульсов используется по новому назначению - для формирования корректирующего сигнала для контура тока регулируемого электропривода.
Управляемые таймеры, датчики скорости прокатки и датчики перемещений слитка в известных устройствах аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
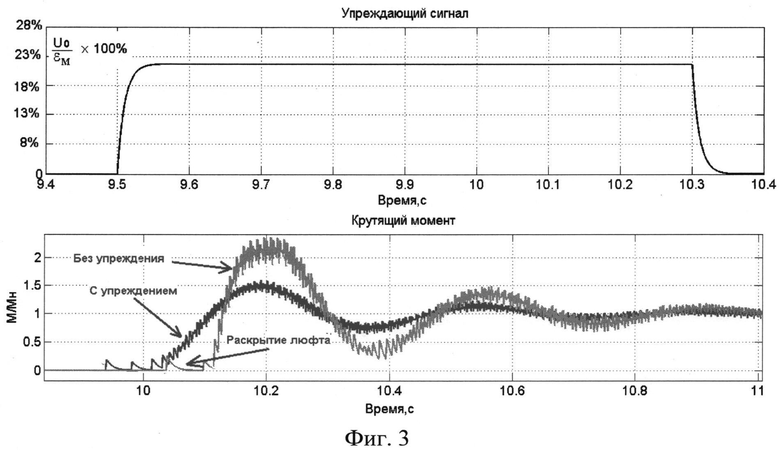
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 показана функциональная схема электропривода, на фиг.2 представлена зависимость максимального момента нагрузки при прокатке от величины корректирующего сигнала, подаваемого на второй суммирующий вход регулятора тока 10; на фиг.3 приведены результаты моделирования электрического привода прокатного стана.
Электрический привод прокатного стана (фиг.1) содержит задатчик 1 угловой скорости двигателя, масштабирующий усилитель 2, первый 3 и второй 4 элементы сравнения, нелинейный функциональный преобразователь 5, реализующий функцию

управляемый ключ 7, блок ограничения 8, регулятор скорости 9, регулятор тока 10, усилитель мощности 11, датчик тока 12, двигатель постоянного тока независимого возбуждения 13, датчик напряжения 14, датчик угловой скорости двигателя 15, датчик скорости прокатки 16, датчик 17 перемещений слитка 6, управляемый таймер 18, формирующий задержку длительностью
где τ0 - константа; V - линейная скорость слитка на входе в клеть, L - расстояние от датчика линейных перемещений до рабочей клети, формирователь 19 импульсов амплитудой U0 и длительностью Δτ; рольганги 21.
В предлагаемом электрическом приводе прокатного стана якорная обмотка двигателя постоянного тока 13 через датчик тока 12 подключена к выходу усилителя мощности 11, вход которого соединен с выходом регулятора тока 10, подключенного первым суммирующим входом к выходу регулятора угловой скорости 9 двигателя, а вычитающим входом к выходу датчика тока 12, выходы задатчика 1 и датчика 15 угловой скорости двигателя 13 подключены соответственно к суммирующему и вычитающему входам первого элемента сравнения 3, выход которого через блок ограничения 8 подключен к первому суммирующему входу регулятора скорости 9 и непосредственно соединен с первым входом нелинейного функционального преобразователя 5, реализующего функцию

где ε, u2 - первый и второй входные сигналы; Ue - напряжение, соответствующее уровню логической единицы,
второй вход которого через масштабирующий усилитель 2 подключен к выходу задатчика скорости 1, а выход соединен с управляющим входом первого управляемого ключа 7, присоединенного между суммирующим входом регулятора скорости 9 и выходом второго элемента сравнения 4, суммирующий вход которого подключен к выходу задатчика скорости 1, а вычитающий вход соединен с выходом датчика напряжения 14, подключенного к якорной обмотке двигателя 13, второй суммирующий вход регулятора тока подключен через формирователь импульсов 19 к выходу управляемого таймера 18, формирующего задержку длительностью

где τ0 - заданная постоянная длительность интервала времени от начала формирования корректирующего сигнала до момента вхождения слитка 6 в клеть 20; V - линейная скорость слитка на входе в клеть, L - расстояние от датчика 17 перемещений слитка 6 до рабочей клети 20, управляющий и установочный входы управляемого таймера соединены с выходами соответственно датчика скорости прокатки 16 и датчика 17 перемещений слитка 6.
Электрический привод прокатного стана работает следующим образом. Якорная обмотка двигателя постоянного тока независимого возбуждения 13 подключена к выходу усилителя мощности 11. Регулирование скорости Ω двигателя осуществляется изменением напряжения на якорной обмотке. Угловая скорость двигателя 13 измеряется датчиком 15 угловой скорости двигателя, например тахогенератором. Ток двигателя 13 измеряется с помощью датчика тока 12, например шунта. Измерение напряжения на якорной обмотке двигателя 13 производится датчиком напряжения 14.
На суммирующий вход первого элемента сравнения 3 с выхода задатчика 1 угловой скорости двигателя поступает сигнал u1, пропорциональный требуемому значению скорости двигателя 13. На вычитающий вход первого элемента сравнения 3 поступает выходной сигнал u15 датчика 15 угловой скорости двигателя, пропорциональный скорости Ω вращения ротора двигателя 13. В элементе сравнения производится вычисление ошибки регулирования ε=u1-u15. Сигнал ε с выхода элемента сравнения 3 поступает на объединенные первый вход нелинейного функционального преобразователя 5 и вход блока ограничения 8. На втором входе нелинейного функционального преобразователя 5 действует сигнал u2 с выхода масштабирующего усилителя 2, пропорциональный сигналу задания u1. На выходе нелинейного функционального преобразователя 5 формируется сигнал

где ε, u2 - первый и второй входные сигналы;
Ue - напряжение, соответствующее уровню логической единицы. Выходной сигнал блока ограничения 8 имеет вид

где εм - максимальное значение выходного сигнала блока ограничения.
Второй элемент сравнения 4, на суммирующий и вычитающий входы которого поступают сигналы с выходов соответственно задатчика 1 угловой скорости двигателя и датчика напряжения 14, вычисляет рассогласование u4=γ=u1-u14. В электроприводе постоянного тока скорость двигателя прямо пропорциональна напряжению и на якорной обмотке и моменту сопротивления нагрузки Mc:

где c - конструктивная постоянная двигателя;
r - сопротивление якорной обмотки.
Поэтому

следовательно, рассогласование по напряжению в системе электропривода отличается от рассогласования по скорости на величину, пропорциональную моменту нагрузки Mc.
Сигнал u4 с выхода второго элемента сравнения 4 через первый управляемый ключ 7 поступает на один из входов сумматора, на втором входе которого действует выходной сигнал блока ограничения 8. Первый управляемый ключ 7 в соответствии с алгоритмом (1) работы нелинейного функционального преобразователя 5 замкнут при |ε|≥|u2| и разомкнут при |ε|<|u2|. Это означает, что при большой ошибке системы электропривода по скорости ε величина этой ошибки на первом суммирующем входе регулятора скорости 9 ограничивается значением εм, а на другом суммирующем входе регулятора скорости 9 действует сигнал, пропорциональный рассогласованию по напряжению. Регулятор скорости 9 преобразует входной сигнал в соответствии с законом регулирования, например пропорционально-интегральным, и формирует сигнал задания для подчиненного контура регулирования тока 10, который в свою очередь формирует сигнал управления для усилителя мощности 11. Работа системы управления происходит таким образом, что величина суммарной ошибки u4+u8, уменьшается, следовательно, уменьшаются ε и γ. При достижении рассогласованием системы по скорости 8 значения u2 происходит изменение выходного сигнала нелинейного функционального преобразователя 5 и размыкание управляемого ключа 7. Далее электропривод функционирует как двухконтурная система регулирования скорости с подчиненным контуром регулирования тока. Рассогласование 8 электропривода при этом достигает значения, величина которого определяется структурой электропривода и погрешностью датчика скорости.
При наличии люфта в механической передаче при захвате слитка в результате приложения ударной нагрузки происходит раскрытие зазора, «ведущая» масса (ротор электродвигателя) разгоняется, а «ведомая» масса затормаживается; в результате величина зазора в механической передаче начинает уменьшаться и происходит «сцепление» этих масс, к электроприводу повторно прикладывается ударная нагрузка. Процесс раскрытия люфта повторяется. Из-за колебаний скорости обеих масс в электромеханической системе возникают дополнительные динамические нагрузки. Снижение частоты вращения двигателя, приводящее к раскрытию зазора, происходит из-за невозможности мгновенного увеличения соответствующего электромагнитного момента, который пропорционален току в якорной обмотке. Таким образом, раскрытие зазора связано с замедленным увеличением тока якорной обмотки двигателя. Для решения этой проблемы предлагается упреждающее увеличение тока в якорной обмотке электрического двигателя 13 путем изменения напряжения на якорной обмотке. Этот эффект в предлагаемом техническом решении достигается путем предварительной подачи на второй суммирующий вход регулятора тока 10 импульса с амплитудой U0 и продолжительностью Δτ, за интервал времени τ0 до захвата слитка 6 валками рабочей клети прокатного стана 20.
Управляемый таймер 18 по результатам опроса датчика скорости прокатки 16 вычисляет время 

В результате подачи импульса на второй суммирующий вход регулятора тока 10 за время τ0 до захвата слитка 6 валками первой рабочей клети возникает переходный процесс, сопровождающийся ростом тока якорной обмотки, а соответственно, и электромагнитного момента. Таким образом, в момент приложения нагрузки в якорной цепи приводного двигателя 13 протекает повышенный ток, а соответственно, двигатель развивает увеличенный электромагнитный момент. В результате этого уменьшается сила удара вращающихся масс, резкого снижения скорости после приложении нагрузки и раскрытия люфта не происходит. Таким образом, динамическая нагрузка снижается, качество процессов регулирования повышается.
При моделировании прокатного стана 300 установлено, что наибольший эффект достигается, если время между моментом приложения нагрузки и подачей импульса не более 0,5 с.
С целью подтверждения положительного эффекта, достигаемого при использовании предлагаемого технического решения, было выполнено компьютерное моделирование электропривода, реализованного по схеме, изображенной на фиг.1.
Параметры системы имели следующие значения.
Двигатель постоянного тока: активное сопротивление якоря r=0,0244 Ом; индуктивность якорной цепи L=0,0046 Гн; конструктивная постоянная с=18 В·с/рад; приведенный момент инерции J=130 кг·м2; усилитель мощности: коэффициент передачи kу=78; ПИ-регулятор тока: коэффициент передачи регулятора тока kрт=0,0244; постоянная времени Tрт=5,3043 с; ПИ-регулятор скорости: коэффициент передачи регулятора скорости kpc=80; постоянная времени Tрс=0,7 с; масштабирующий усилитель с коэффициентом передачи k=2.
Результаты имитационного моделирования приведены на фиг.3. Из диаграммы следует, что при использовании предлагаемого технического решения момент нагрузки при захвате слитка уменьшается в 1,4 раза, а колебания скорости не развиваются.
Таким образом, использование в известном электроприводе, содержащем двигатель постоянного тока, якорная обмотка которого через датчик тока подключена к выходу усилителя мощности, вход которого соединен с выходом регулятора тока, подключенного первым суммирующим входом к выходу регулятора скорости, а вычитающим входом к выходу датчика тока, выходы задатчика и датчика угловой скорости двигателя подключены соответственно к суммирующему и вычитающему входам первого элемента сравнения, выход которого через блок ограничения подключен к первому суммирующему входу регулятора скорости и непосредственно соединен с первым входом нелинейного функционального преобразователя, реализующего функцию 
где ε, u2 - первый и второй входные сигналы; Ue - напряжение, соответствующее уровню логической единицы, второй вход которого через масштабирующий усилитель подключен к выходу задатчика угловой скорости двигателя, а выход соединен с управляющим входом управляемого ключа, присоединенного между суммирующим входом регулятора скорости и выходом второго элемента сравнения, суммирующий вход которого подключен к выходу задатчика угловой скорости двигателя, а вычитающий вход соединен с выходом датчика напряжения, подключенного к якорной обмотке двигателя, дополнительно датчика скорости прокатки, датчика перемещений слитка, управляемого таймера, формирователя импульсов и оснащение регулятора тока вторым суммирующим входом, подключенным через формирователь импульсов к выходу управляемого таймера, управляющий и установочный входы которого соединены с выходами соответственно датчика скорости прокатки и датчика перемещения слитка, позволяет уменьшить динамические нагрузки при прокатке металлов.
Использование предлагаемого устройства в промышленных системах прокатного производства позволит повысить технический уровень оборудования и качество технологического процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТРЕНИЯ ПРИ ПРОКАТКЕ МЕТАЛЛОВ | 2013 |
|
RU2527324C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| ЭЛЕКТРОПРИВОД ОТКРЫВАНИЯ ДНИЩА КОВША ЭКСКАВАТОРА | 2020 |
|
RU2742674C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| ЭКСКАВАТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2068615C1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2065660C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ОТКРЫВАНИЯ ДНИЩА КОВША ЭКСКАВАТОРА | 2020 |
|
RU2734182C1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКРЫВАНИЕМ ДНИЩА КОВША ЭКСКАВАТОРА | 2023 |
|
RU2816132C1 |

Изобретение относится к области электротехники и может быть использовано в автоматизированном электроприводе. Техническим результатом является уменьшение динамических нагрузок и повышение качества регулирования при прокатке металлов. Электрический привод прокатного стана содержит задатчик (1) угловой скорости двигателя, масштабирующий усилитель (2), два элемента (3, 4) сравнения, нелинейный функциональный преобразователь (5), управляемый ключ (7), блок ограничения (8), регулятор скорости (9), регулятор тока (10), усилитель мощности (11), датчик тока (12), двигатель постоянного тока независимого возбуждения (13), датчик напряжения (14), датчик угловой скорости двигателя (15), датчик скорости прокатки (16), датчик перемещений слитка (17), управляемый таймер (18), формирующий задержку, и формирователь импульсов (19) амплитудой U0 и длительностью Δτ. Повышение качества регулирования в электроприводе и снижение динамических нагрузок, вызванных раскрытием люфта, достигается упреждающим увеличением электромагнитного момента электродвигателя перед захватом слитка валками. 3 ил.
Электрический привод прокатного стана, содержащий двигатель постоянного тока, якорная обмотка которого через датчик тока подключена к выходу усилителя мощности, вход которого соединен с выходом регулятора тока, подключенного первым суммирующим входом к выходу регулятора угловой скорости двигателя, а вычитающим входом к выходу датчика тока, выходы задатчика и датчика угловой скорости двигателя подключены соответственно к суммирующему и вычитающему входам первого элемента сравнения, выход которого через блок ограничения подключен к первому суммирующему входу регулятора скорости и непосредственно соединен с первым входом нелинейного функционального преобразователя, реализующего функцию
где ε, u2 - первый и второй входные сигналы; Ue - напряжение, соответствующее уровню логической единицы, второй вход которого через масштабирующий усилитель подключен к выходу задатчика скорости, а выход соединен с управляющим входом первого управляемого ключа, присоединенного между суммирующим входом регулятора скорости и выходом второго элемента сравнения, суммирующий вход которого подключен к выходу задатчика скорости, а вычитающий вход соединен с выходом датчика напряжения, подключенного к якорной обмотке двигателя, отличающийся тем, что дополнительно введены датчик скорости прокатки, датчик перемещений слитка, управляемый таймер, формирующий задержку длительностью
,
где τ0 - заданная постоянная длительность интервала времени от начала формирования корректирующего сигнала до момента вхождения слитка в клеть; V - линейная скорость слитка на входе в клеть, L - расстояние от датчика перемещений слитка до рабочей клети, и формирователь импульсов, а регулятор тока оснащен вторым суммирующим входом, подключенным через формирователь импульсов к выходу управляемого таймера, управляющий и установочный входы которого соединены с выходами соответственно датчика скорости прокатки и датчика перемещений слитка.
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| RU 2055660 С1, 20.08.1996 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2079962C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ОРТО-, ИЛИ МЕТА-, ИЛИ ПАРА-ИЗОМЕРОВ ЭВГЕНОЛА ИЗ ИХ СМЕСЕЙ | 0 |
|
SU237910A1 |
| DE 10215530 A1, 06.03.2003 | |||
| JP 2000242048 A, 22.10.2009 | |||
| US 8419154 B2, 01.10.2009 | |||

