Изобретение относится к автоматическому регулированию и предназначено для использования в различных системах автоматики.
Известны способы формирования ПИ-закона регулирования, при которых входной сигнал, пропорциональный ошибке регулирования, интегрируют, результат суммируют с входным сигналом, а суммарный сигнал масштабируют (Ялышев А. У. и Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с. 76-77; авт. св. N 475602 (СССР) Электронный аналоговый пропорционально-интегрально-дифференциальный регулятор. А.У. Ялышев и др. Опублик. в БИ, 1975, N 24, МКИ G 05 B 11/36).
Известные способы обеспечивают формирование регулирующего воздействия для объекта, пропорциональное сумме входного сигнала рассогласования системы и интеграла от него:
где kп - коэффициент пропорциональности;
Tи - постоянная времени.
При таком способе обеспечивается быстрая реакция системы на изменения рассогласования за счет постоянной составляющей и высокая точность регулирования в установившихся режимах, обеспечиваемая интегральной составляющей. Однако при управлении инерционными объектами известные способы не обеспечивают высокое качество регулирования в переходных режимах, что проявляется в повышенной длительности колебательных процессов отработки рассогласования. Это обеспечивается инерционным действием интегратора. Особенно сильное проявление колебательности наблюдается в системах управления при ограниченной мощности исполнительного устройства, т. е. при наличии нелинейности типа "ограничение". В этом случае замедление отработки рассогласования приводит к увеличению выходного сигнала интегратора и его насыщению. В момент достижения ошибкой системы 0 на выходе интегратора оказывается большое напряжение, снижение которого возможно только при изменении знака рассогласования. В результате в системе возникают длительные колебания.
Таким образом, недостаток известных способов формирования ПИ-закона регулирования - низкое качество регулирования в переходных режимах.
Из известных, наиболее близким по достигаемому результату к предлагаемому является способ формирования ПИ-закона регулирования, при котором входной сигнал, пропорциональный ошибке регулирования, интегрируют, получаемый при этом сигнал суммируют с входным сигналом, а сумму масштабируют, измеряют выходной сигнал и при достижении им порогового значения прекращают интегрирование входного сигнала (Гельднер К. и Кубик С. Нелинейные системы управления. М.: Мир, 1987, с. 265-266, рис. 164).
В соответствии с известным способом производится отключение интегрирующей части регулирующего устройства при достижении выходным сигналом порогового значения, благодаря чему снижается нежелательное перерегулирование.
Однако, при известном способе формирования ПИ-закона регулирования качество переходных процессов остается низким. Это объясняется тем, что, во-первых, при отключении интегратора на его выходе хранится напряжение, величина которого может быть большой и вызвать колебания в системе при его включении, и, во-вторых, возможным снижением точности регулирования при действии возмущений, т.к. при отключенном интеграторе возможно появление статической ошибки регулирования.
Таким образом, недостаток известного способа - низкое качество регулирования.
Цель предлагаемого изобретения - повышение качества регулирования путем уменьшения перерегулирования и колебательности переходных процессов при высокой статической точности.
Поставленная цель достигается тем, что в известном способе формирования ПИ-закона регулирования, при котором входной сигнал, пропорциональный ошибке регулирования, интегрируют, получаемый при этом сигнал суммируют с входными сигналом, а сумму масштабируют, дополнительно определяют абсолютное значение входного сигнала, сравнивают его с пороговым значением и при превышении абсолютным значением входного сигнала порогового уровня интегрируют разность входного сигнала и сигнала, пропорционального результату интегрирования.
По сравнению с наиболее близким аналогичным техническим решением предлагаемый способ имеет следующие отличительные признаки (новые операции):
- определяют абсолютное значение входного сигнала;
- сравнивают абсолютное значение входного сигнала с пороговым уровнем;
- интегрируют разность входного сигнала и сигнала, пропорционального результату интегрирования, при превышении абсолютным значением входного сигнала порогового уровня.
Следовательно, заявляемый способ формирования ПИ-закона регулирования соответствует требованию "новизна".
По каждому отличительному существенному признаку проведен поиск известных технических решений в области автоматического управления.
Операции, состоящие в том, что определяют абсолютное значение входного сигнала, сравнивают абсолютное значение входного сигнала с пороговым уровнем и интегрируют разность входного сигнала и сигнала, пропорционального результату интегрирования, в известных технических решениях не обнаружены.
Следовательно, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию "существенные отличия".
Сущность предлагаемого способа формирования ПИ-закона регулирования заключается в следующем. В установившемся режиме при малой ошибке системы регулирующее воздействие формируют как промасштабированную сумму входного сигнала и интеграла от него, т.е. как при обычном ПИ-законе регулирования. При большом рассогласовании в системе, например, при изменении сигнала задания или возмущения регулирующее воздействие формируют как сумму входного сигнала и выходного сигнала интегратора, охваченного отрицательной обратной связью, т. е. как при интегро-дифференцирующем корректирующем устройстве. В результате обеспечивается высокая точность автоматической системы в установившихся режимах и высокое качество регулирования при переходных процессах.
Следовательно, предлагаемое изобретение соответствует требованию "положительный эффект".
Предлагаемый способ формирования ПИ-закона регулирования может быть реализован как программно, так и аппаратно. На фиг. 1 приведена функциональная схема аналогового регулирующего устройства, реализующего предлагаемый способ, поясняющая сущность изобретения, обозначено: 1 - блок выделения модуля, формирующий сигнал u1=  , где x - входной сигнал, пропорциональный ошибке регулирования; 2 - пороговый элемент с характеристикой:
, где x - входной сигнал, пропорциональный ошибке регулирования; 2 - пороговый элемент с характеристикой:
где Ue - напряжение, соответствующее уровню логической единицы; x0 - пороговый уровень; 3 - интегратор; 4 - управляемый ключ; S - сумматор; 6 - масштабирующий усилитель с коэффициентом передачи k.
Входной сигнал x(t), пропорциональный ошибке регулирования, поступает одновременно на входы блока выделения модуля 1, интегратора 3 и сумматора 5. Выходной сигнал интегратора 3 поступает на один из входов сумматора 5 и через нормально-разомкнутый ключ 4 - на вычитающий вход интегратора 3. Выходной сигнал сумматора 5 поступает на вход масштабирующего усилителя, выход которого служит выходом устройства. Управление ключом 4 осуществляется выходным сигналом порогового элемента 2.
При малой ошибке регулирования  <x0 выходной сигнал порогового элемента 2 имеет значение U2=0, при этом ключ 4 - разомкнут. Устройство в этом случае представляет собой обычный ПИ-регулятор с передаточной функцией:
<x0 выходной сигнал порогового элемента 2 имеет значение U2=0, при этом ключ 4 - разомкнут. Устройство в этом случае представляет собой обычный ПИ-регулятор с передаточной функцией:
H(s)=k(1+1/Ts),
где k - коэффициент передачи масштабирующего усилителя 6, Т - постоянная времени интегратора 3.
Так как ПИ-регулятор - астатический, то в установившемся режиме ошибка регулирования стремится к 0. Регулирующее воздействие при этом формируется на выходе интегратора (напряжение U3 уст). В случае превышения абсолютным значением ошибки регулирования порогового уровня x0, например, при изменении сигнала задания или возмущения выходной сигнал порогового элемента 2 принимает значение U2= Ue . В результате этого замыкается ключ 4. При этом регулирующее воздействие формируется как сумма двух слагаемых: пропорционального ошибке регулирования kx и выходного сигнала интегратора, охваченного обратной связью. Передаточная функция устройства при этом имеет вид:
где α - коэффициент обратной связи; т.е. соответствует интегро-дифференциальному звену.
Таким образом, при предлагаемом способе осуществляется быстрая отработка большой ошибки регулирования, а при достижении ошибкой уровня x0 происходит безударное включение астатической составляющей (пропорциональной интегралу от ошибки регулирования), благодаря чему обеспечивается высокая точность регулирования.
Значение x0 выбирается из условия обязательного переключения закона регулирования на астатический при малых ошибках, т.е. оно должно быть не менее максимально возможной ошибки системы при статическом регулировании, т.е.
где gмакс - максимальное входное управляющее воздействие;
fв.м. - максимальное возмущающее воздействие;
k0 - коэффициент передачи разомкнутой системы при статическом регулировании;
kв - коэффициент передачи системы по возмущению.
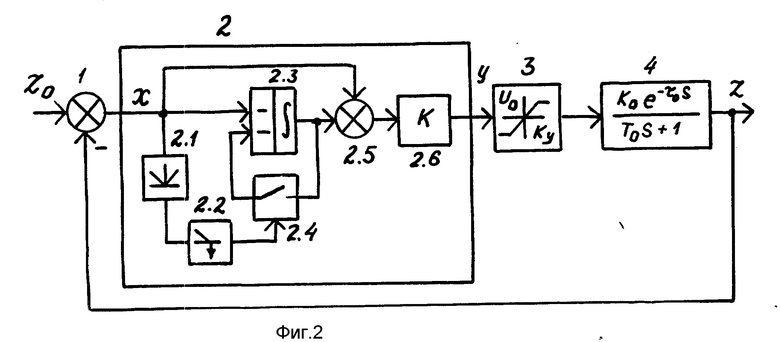
С целью подтверждения положительного эффекта, достигаемого с помощью предлагаемого технического решения, было проведено математическое моделирование процессов в автоматической системе с регулятором, реализующим рассмотренный способ формирования ПИ-закона регулирования. Функциональная схема системы показана на фиг. 2, где обозначено: 1 - элемент сравнения, 2 - ПИ-регулятор, 3 - исполнительное устройство с коэффициентом передачи ky и ограничением выходного воздействия на уровне U0, 4 - объект управления с передаточной функцией:
При моделировании были приняты следующие параметры объекта: k0=1; T0=0,2 с; τ0 = 0,05 c. .
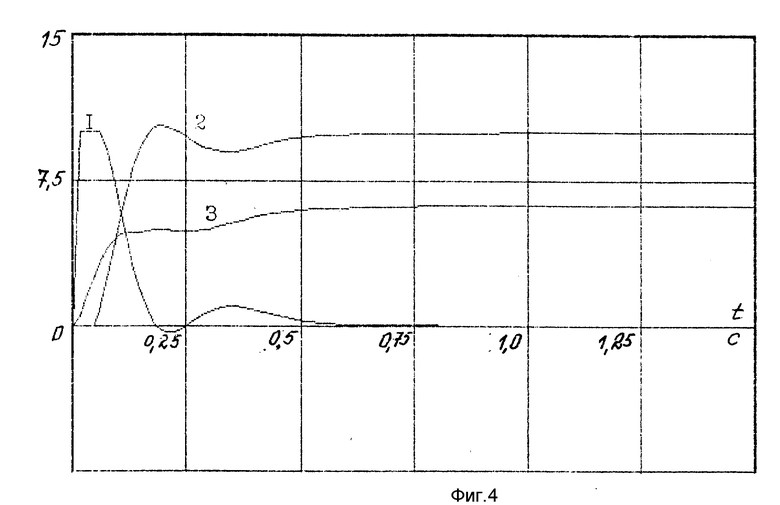
На фиг. 3 приведены диаграммы процессов в системе для ошибки x, выходного сигнала y и выходного сигнала интегратора Uинт для случая классической настройки ПИ-регулятора (Кулаков Г. Т. Инженерные экспресс-методы расчета промышленных систем регулирования. Минск: Вышэйшая школа, 1984, с. 73-86). При этом параметры регулятора были установлены следующими: kp=2; Tp=0,2 с, ограничение воздействия на объект не учитывалось. На фиг. 4 показаны аналогичные графики процессов в системе при предлагаемом способе формирования ПИ-закона регулирования, x0=2,5; α = 0,9. .
На фиг. 5 приведены графики переходных процессов в системе с традиционным ПИ-регулятором при ограничении U0=12,5, а на фиг. 6 - процессы в системе при использовании предлагаемого способа регулирования.
Важным достоинством предлагаемого способа формирования ПИ-закона регулирования является то, что он может быть легко реализован как аппаратным, так и программным способом.
Использование предлагаемого способа формирования ПИ-закона регулирования в различных системах автоматики позволит повысить качество процессов управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ И ДИАГНОСТИКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ | 1999 |
|
RU2150727C1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2017 |
|
RU2648516C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМ КОМПЕНСАТОРОМ | 2020 |
|
RU2757154C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| Пневматический регулятор | 1979 |
|
SU849140A1 |
| СПОСОБ СЛЕДЯЩЕГО ДИСКРЕТНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 1991 |
|
RU2025763C1 |



Изобретение относится к автоматическому регулированию. Технический результат заключается в повышении качества процессов управления в различных системах автоматики. Формирование сигнала управления осуществляется в зависимости от абсолютного значения ошибки регулирования: при малой его величине регулирующее воздействие реализуется как промасштабированная сумма входного сигнала и интеграла от него, при больших значениях абсолютной величины ошибки интегрирование заменяется на апериодическую фильтрацию. Порог переключения выбирается из условия обязательного включения астатической составляющей при малых ошибках. Повышение качества регулирования обеспечивается за счет снижения выходной составляющей интегральной части в переходных процессах. 6 ил.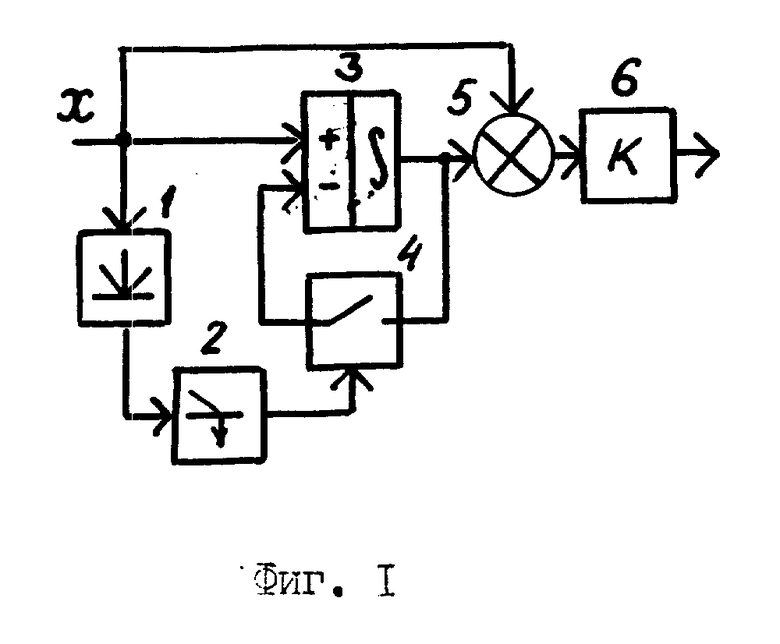
Способ формирования ПИ-закона регулирования, при котором входной сигнал, пропорциональный ошибке регулирования, интегрируют, получаемый при этом сигнал суммируют с входным сигналом, а сумму масштабируют, отличающийся тем, что дополнительно определяют абсолютное значение входного сигнала, сравнивают его с пороговым значением и при превышении абсолютным значением входного сигнала порогового уровня интегрируют разность входного сигнала и сигнала, пропорционального результату интегрирования.
| Гельднер К., Кубик С | |||
| Нелинейные системы управления | |||
| - М.: Мир, 1987, с.265, 266, рис.164. |
