Изобретение относится к области радиотехники и может быть использовано в устройствах приема цифровых информационных сигналов для цифровой некогерентной демодуляции четырехпозиционных сигналов с относительной фазовой манипуляцией (ОФМ4 или QPSK).
Известно устройство некогерентной демодуляции многопозиционных сигналов (см. Скляр Б. Цифровая связь. Теоретические основы и практическое применение. - М.: Издательский дом «Вильяме», 2003, 1104 с.), состоящее из корреляторов и решающего блока.
Близким к предлагаемому устройству является демодулятор четырехпозиционных сигналов с относительной фазовой модуляцией (см. Окунев Ю.Б. Цифровая передача информации фазомодулированными сигналами. - М.: Радио и связь, 1991, 296 с.). Он состоит из двух корреляторов, двух блоков задержки, решающего блока, генератора опорного колебания, фазовращателя и генератора тактовых импульсов. Эти устройства осуществляют квадратурную корреляционную обработку входного сигнала с последующим сравнением фаз соседних информационных элементов. К недостаткам известных устройств следует отнести: сложность реализации высокоскоростных корреляторов, особенно в цифровой форме; необходимость выполнения большого числа арифметических операций на каждый поступивший отсчет сигнала, что требует использования высокоскоростных вычислителей.
Наиболее близким по технической сущности и внутренней структуре к предлагаемому устройству является цифровой демодулятор сигналов с относительной фазовой манипуляцией (Патент РФ №2505922 от 27.01.2014.
Цифровой демодулятор сигналов с относительной фазовой манипуляцией. Авторы Глушков А.Н., Литвиненко В.П.).
Его недостатком является отсутствие возможности демодуляции четырехпозиционных сигналов с относительной фазовой манипуляцией.
Технической задачей предлагаемого технического решения является обеспечение высокоскоростной цифровой демодуляции сигналов с четырехпозиционной относительной фазовой манипуляцией.
Технический результат, используемый при решении поставленной задачи, заключается в минимизации выполняемых арифметических операций при обеспечении помехоустойчивости, близкой к потенциальной, и достигается тем, что цифровой некогерентный демодулятор четырехпозиционных сигналов с относительной фазовой манипуляцией, содержащий аналого-цифровой преобразователь (АЦП), регистр сдвига многоразрядных кодов на четыре отсчета, первый и второй n-каскадные каналы квадратурной обработки (ККО) сигналов и генератор тактовых импульсов (ГТИ), дополнительно содержит первое и второе регистровые запоминающие устройства (РЗУ), первый, второй, третий и четвертый цифровые умножители (ЦУ), первое и второе суммирующее устройство (СУ), первое и второе вычитающее устройство (ВУ), первое и второе решающее устройство (РУ) и декодер ДК, выход первого ККО соединен с входом первого РЗУ и с первыми входами первого и третьего ЦУ, второй вход первого ЦУ соединен с выходом первого РЗУ, а второй вход третьего ЦУ - с выходом второго РЗУ, выход второго ККО соединен с входом первого РЗУ и с первыми входами второго и четвертого ЦУ, второй вход второго ЦУ соединен с выходом первого РЗУ, а второй вход четвертого ЦУ - с выходом второго РЗУ, выход первого ЦУ соединен с первым входом первого СУ, второй вход которого соединен с выходом четвертого ЦУ, выход второго ЦУ соединен с первым входом первого ВУ, второй вход которого соединен с выходом третьего ЦУ, выход первого СУ подключен к первым входам второго ВУ и второго СУ, а выход первого ВУ подключен к вторым входам второго ВУ и второго СУ, выход второго ВУ соединен с входом первого РУ, а выход второго СУ - с входом второго РУ, на стробирующие входы первого и второго РУ подается сигнал символьной синхронизации, выходы первого и второго РУ соединены с первым и вторым входами декодера ДК, на выходе которого формируются два двоичных разряда выходного сигнала демодулятора.
Предлагаемое техническое решение поясняется чертежами.
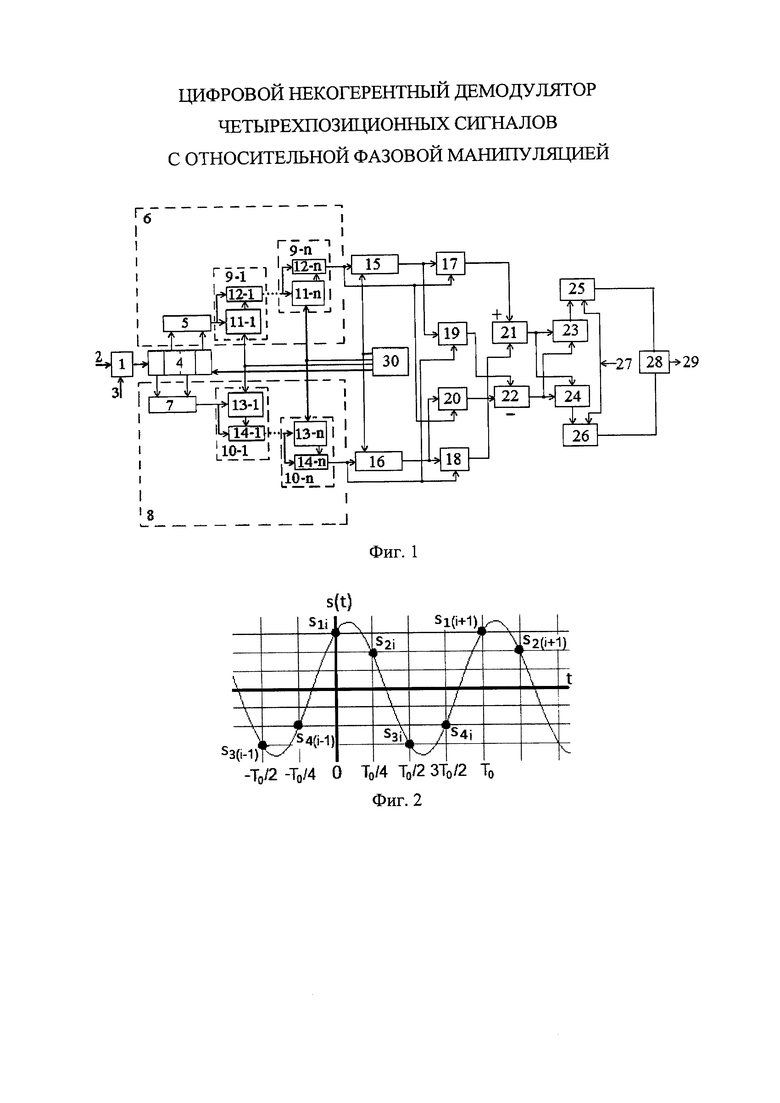
На фиг. 1 представлена структурная схема предлагаемого устройства, на фиг. 2 - процесс квантования входного сигнала (по 4 отсчета на период), на фиг. 3 и фиг. 4 - результаты моделирования работы демодулятора при отсутствии и наличии шума, соответственно, а на фиг. 5 сплошной линией показана зависимость вероятности ошибки демодуляции сигнала с четырехпозиционной ОФМ от отношения сигнал/шум, точками отмечены результаты статистического имитационного моделирования, пунктиром показана аналогичная зависимость для двоичной ОФМ.
Устройство содержит АЦП 1(фиг. 1), на вход которого поступает принимаемый сигнал 2 с выхода усилителя промежуточной частоты приемника, а на управляющий вход - тактовые импульсы 3. Выход АЦП 1 соединен с входом регистра 4 сдвига многоразрядных кодов на четыре отсчета, четные выходы которого соединены с соответствующими входами вычитателя 5 первого ККО 6, а нечетные выходы - с соответствующими входами вычитателя 7 второго ККО 8. Каждый ККО помимо вычитателя содержит n каскадно соединенных блоков накопления отсчетов (БНО). Количество БНО n зависит от числа N периодов сигнала в информационном символе и определяется двоичным логарифмом N (n=log2N). Такое построение устройства обеспечивает минимальное количество БНО, при этом число обрабатываемых периодов сигнала равно N=2n, а длительность информационного символа NT0, где Т0 - период несущей частоты f0 сигнала.
Первый ККО 6 содержит последовательно соединенные БНО 9-1, …, 9-n, а второй ККО 8 - последовательно соединенные БНО 10-1, …, 10-n. Каждый из БНО состоит из регистра сдвига многоразрядных кодов и сумматора.
Блоки 9-1, …, 9-n накопления отсчетов содержат регистры 11-1, …, 11-n сдвига многоразрядных кодов и сумматоры 12-1, …, 12-n соответственно, а БНО 10-1, …, 10-n - соответственно регистры 13-1, …, 13-n сдвига многоразрядных кодов и сумматоры 14-1, …, 14-n. В каждом блоке 9 (10) накопления отсчетов первый вход регистра 11 (13) сдвига является входом блока 9 (10) накопления отсчетов. Второй вход сумматора 12 (14) соединен с выходом регистра 11 (13) сдвига. Выход сумматора 12 (14) является выходом блока 9 (10) накопления отсчетов, а тактовый вход регистра 11 (13) сдвига является управляющим входом блока 9(10) накопления отсчетов.
Выход вычитателя 5 соединен с входом блока 9-1 накопления отсчетов ККО 6, а выход блока 9-п накопления отсчетов ККО 6 - с входом первого РЗУ 15 и с первыми входами первого ЦУ 17 и третьего ЦУ 20, второй вход первого ЦУ 17 соединен с выходом первого РЗУ 15, а второй вход третьего ЦУ 20 - с выходом второго РЗУ 16.
Выход вычитателя 7 соединен с входом блока 10-1 накопления отсчетов ККО 8, а выход блока 10-n накопления отсчетов ККО 8 - с входом второго РЗУ 16 и с первыми входами второго ЦУ 19 и четвертого ЦУ 18, второй вход четвертого ЦУ 18 соединен с выходом второго РЗУ 16, а второй вход второго ЦУ 19 - с выходом первого РЗУ 15.
Выход первого ЦУ 17 соединен с первым входом первого СУ 21, а выход четвертого ЦУ 18 подключен к второму входу первого СУ 21. Выход второго ЦУ 19 соединен с первым входом первого ВУ 22, а выход третьего ЦУ 20 подключен к второму входу первого ВУ 22. Выход первого СУ 21 соединен с первым входом второго ВУ 23 и с первым входом второго СУ 24. Выход первого ВУ 22 соединен с вторым входом второго ВУ 23 и с вторым входом второго СУ 24. Выход второго ВУ 23 соединен с входом первого РУ 25, а выход второго СУ 24 - с входом второго РУ 26, на стробирующие входы первого РУ 25 и второго РУ 26 подается сигнал символьной синхронизации 27. Выходы первого РУ 25 и второго РУ 26 соединены с первым и вторым входами декодера ДК 28, формирующего выходной двухразрядный двоичный код выходного сигнала демодулятора 29. Тактовые импульсы от генератора 30 подаются на управляющие входы регистра 4 сдвига многоразрядных кодов, БНО 9-1, …, 9-n, БНО 10-1, …, 10-n, РЗУ 15 и РЗУ 16.
Устройство работает следующим образом.
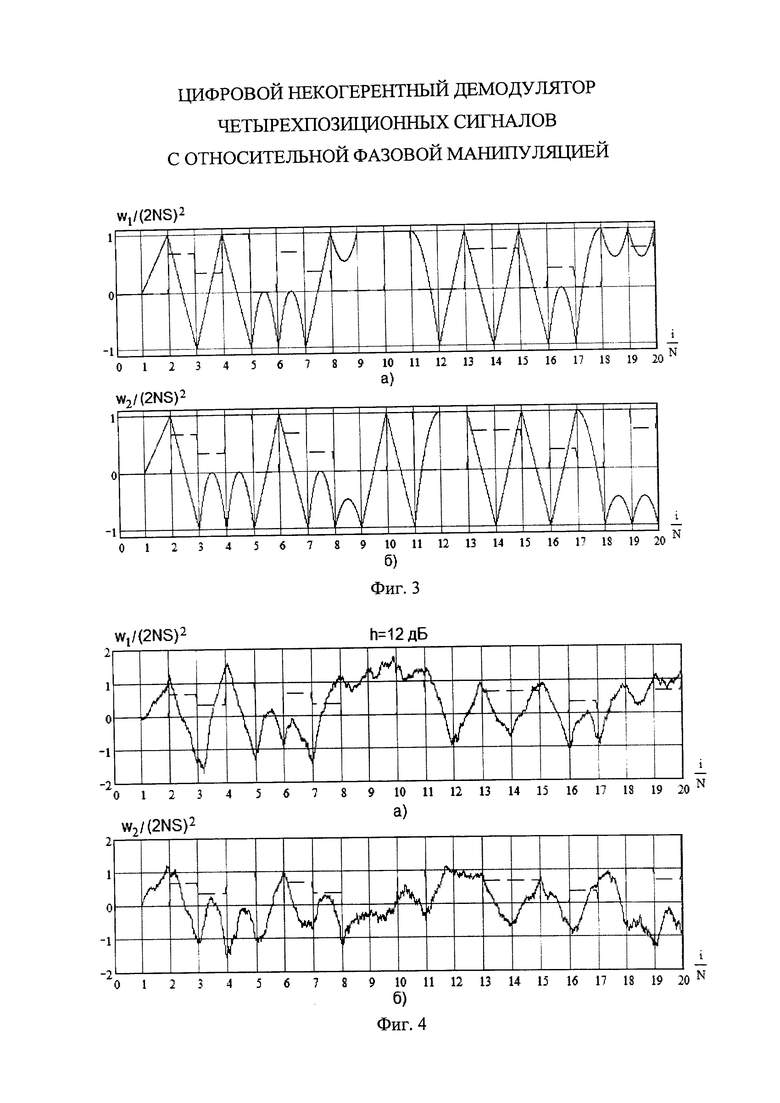
Входной сигнал с четырехпозиционной ОФМ на входе 2 демодулятора вида s(t)=Ssin[2πf0t+a(t)⋅π/2+ϕ], где S - амплитуда, f0 - несущая частота, ϕ - начальная фаза, a(t) - модулирующий фазу сигнал со значениями 0, 1, 2 или 3 (двоичные коды 00, 01, 10, 11) и длительностью информационного элемента ТЭ=NT0, Т0=1/f0, N=2n, n - целое число, поступает на вход аналого-цифрового преобразователя (АЦП) 1, который формирует по четыре отсчета входного сигнала на период повторения Т0 в соответствии с тактовыми импульсами 3 с частотой 4f0 от генератора 30. Процесс квантования для i-ro периода показан на фиг. 2. Результаты работы устройства не зависят от величины начальной фазы ϕ0 сигнала.
На вход вычитателя 5 сначала поступают отсчеты s2i и s4i, а на его выходе формируется разность s2i-s4i=Ssin(ϕ)-(-Ssin(ϕ))=2Ssin(ϕ), которая запоминается в многоразрядном регистре сдвига 11-1. В следующем периоде сигнала на выходе вычитателя 5 получим величину s2(i+1)-s4(i+1)=2Ssin(ϕ) (фиг. 2), а на выходе сумматора 12-1 - (s2i-s4i+s2(i+1)-s4(i+1))=4Ssin(ϕ). После поступления N периодов входного сигнала при отсутствии помех на выходе сумматора 12-n ККО 6 получим результат
y1=s2i-s4i+s2(i+1)-s4(i+1)+…+s2(i+N-1)-s4(i+N-1)=2NSsin(ϕ) обработки 2N отсчетов принятого информационного элемента длительностью ТЭ. Полученные значения y1 запоминаются в РЗУ 15 емкостью N ячеек памяти. Аналогично на вход вычитателя 7 сначала поступают отсчеты s1i, и s3i, на выходе формируется разность s1i-s3i=Scos(ϕ)-(-Scos(ϕ))=2Scos(ϕ), которая запоминается в регистре 13-1. В результате после поступления N периодов входного сигнала на выходе сумматора 14-n ККО 8 получим результат y2=s1i-s3i+s1(i+1)-s3(i+1)+…+s1(i+N-1)-s3(i+N-1)=2NScos(ϕ). Значения y2 запоминаются в РЗУ 16 емкостью N ячеек.
При обработке следующего информационного символа после получения N периодов Т0 на выходах первого ККО 6 и второго ККО 8 соответственно получим y3=2NSsin((ϕ+а⋅π/2) и y4=2NScos(ϕ+а⋅π/2).
В первом ЦУ 17, втором ЦУ 19, третьем ЦУ 20 и четвертом ЦУ 18 соответственно вычисляются произведения
Сигнал на выходе первого суммирующего устройства СУ 21 равен

а на выходе первого вычитающего устройства ВУ 22 соответственно

Тогда на выходе второго СУ 24 в момент окончания принятого символа будет получено значение

а на выходе второго ВУ 23 - соответственно

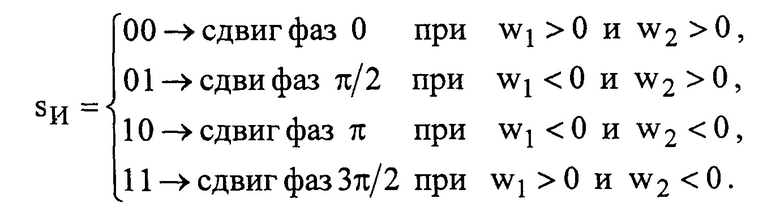
Как видно, полученные величины w1, w2 не зависят от начальной фазы принимаемого сигнала, а определяются разностью фаз соседних информационных элементов и принимают значения ±(2NS)2 при всех значениях информационных символов а, равных 0, 1, 2 или 3. Сигналы w1 и w2 поступают соответственно в первое РУ 25 и второе РУ 26, в которых сравниваются с нулевым уровнем и результирующие двоичные сигналы подаются в декодер ДК 28, формирующий принятый информационный сигнал sИ 29, равный 00, 01, 10 или 11, в соответствии с правилом
В предлагаемом демодуляторе обеспечивается минимум арифметических операций на период сигнала и, следовательно, высокая скорость цифровой обработки сигнала. Технически устройство наиболее целесообразно реализовать на базе программируемых логических интегральных схем (ПЛИС).
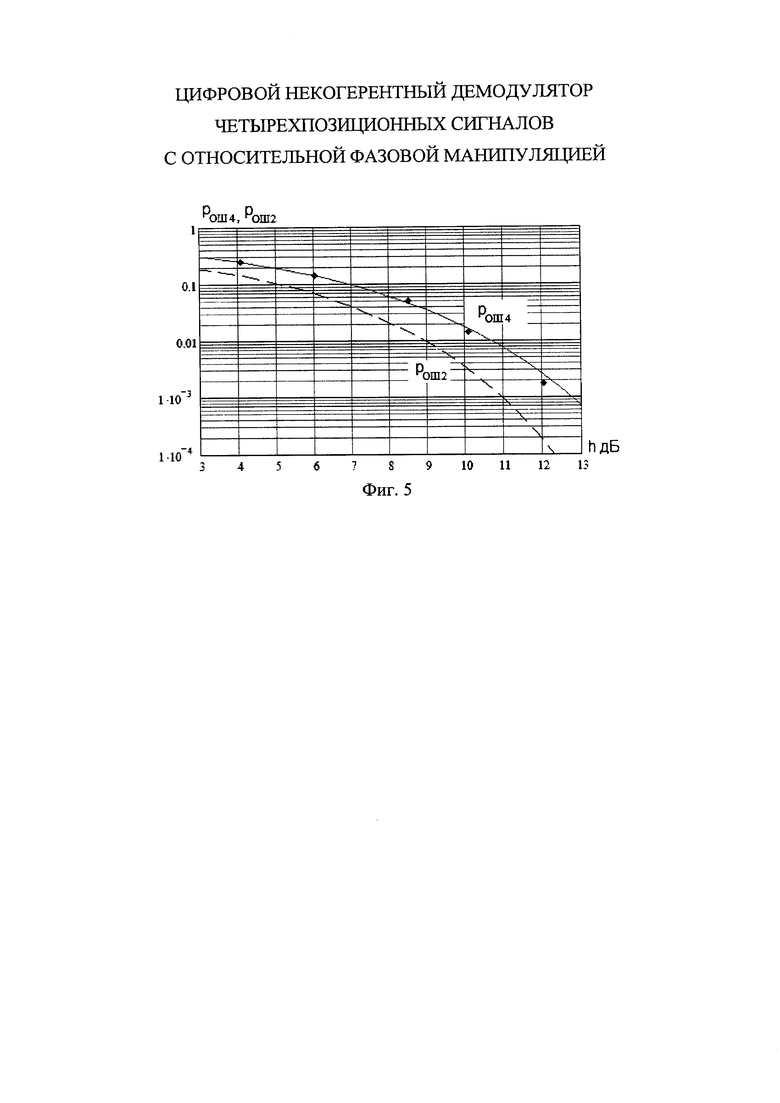
На фиг. 3 показаны нормированные результаты w1/(2NS)2, w2/(2NS)2 статистического имитационного моделирования работы демодулятора при обработке сигнала с четырехпозиционной ОФМ для N=256 в зависимости от нормированного времени t/TЭ=i/N при показанном пунктиром модулирующем сигнале a(t)/3. Целочисленные значения t/TЭ определяют границы информационных элементов (моменты тактовой синхронизации). Интервал t/TЭ от 0 до 2 соответствует переходному процессу заполнения регистров сдвига многоразрядных кодов. На фиг. 4 приведены аналогичные зависимости при наличии шумовой помехи с отношением сигнал/шум h=12 дБ.
Расчеты показывают, что в канале с независимыми отсчетами нормального шума с нулевым средним значением и дисперсией σ2 вероятность ошибки для одного двоичного разряда sИ1 или sИ0 определяется выражением
где wχ(x1) и wχ(x2) - плотности вероятностей нецентрального χ2 - распределения с двумя степенями свободы и одинаковыми дисперсиями σ2, равные


Δ1 и Δ2 - параметры нецентральности, равные [3]

I0(x) - модифицированная функция Бесселя первого рода нулевого порядка.
В результате получим

Этот интеграл вычислен в [3], где показано, что

где 
 Q(α,β) - функция Маркума [3]:
Q(α,β) - функция Маркума [3]:
а отношение сигнал/шум равно  .
.
С учетом независимости ошибок в двоичных разрядах вероятность ошибочной демодуляции четырехпозиционного сигнала с ОФМ равна
Зависимость рОШ4 от n показана на фиг. 5 сплошной линией. Там же пунктиром показана зависимость от отношения сигнал/шум вероятности ошибки демодуляции сигнала с двоичной ОФМ [3]

соответствующая потенциальной помехоустойчивости некогерентной обработки сигналов с активной паузой [4].
Точками на фиг. 5 показаны результаты статистического имитационного моделирования предлагаемого демодулятора сигналов с четырехпозиционной ОФМ. Как видно, расчет помехоустойчивости хорошо согласуется с результатами моделирования.
Литература
1. Скляр Б. Цифровая связь. Теоретические основы и практическое применение. - М.: Издательский дом «Вильямс», 2003, 1104 с.
2. Окунев Ю.Б. Цифровая передача информации фазомодулированными сигналами. - М.: Радио и связь, 1991. - 296 с.
3. Патент РФ №2505922 от 27.01.2014. Цифровой демодулятор сигналов с относительной фазовой манипуляцией. Авторы Глушков А.Н., Литвиненко В.П.
4. Финк Л.М. Теория передачи дискретных сообщений. - М.: «Сов. Радио», 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой некогерентный демодулятор сигналов с амплитудно-четырехпозиционной фазовой манипуляцией | 2021 |
|
RU2761521C1 |
| ЦИФРОВОЙ КОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР ЧЕТЫРЕХПОЗИЦИОННОГО СИГНАЛА С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2017 |
|
RU2656577C1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2011 |
|
RU2505922C2 |
| Цифровой некогерентный демодулятор сигналов с амплитудно-фазовой манипуляцией | 2021 |
|
RU2766429C1 |
| НЕКОГЕРЕНТНЫЙ ЦИФРОВОЙ ДЕМОДУЛЯТОР "В ЦЕЛОМ" КОДИРОВАННЫХ СИГНАЛОВ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2014 |
|
RU2556429C1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР ДВОИЧНЫХ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ ВТОРОГО ПОРЯДКА | 2018 |
|
RU2690959C1 |
| ЦИФРОВОЕ КВАДРАТУРНОЕ УСТРОЙСТВО ФАЗОВОЙ СИНХРОНИЗАЦИИ И ДЕМОДУЛЯЦИИ | 2015 |
|
RU2591032C1 |
| Цифровой демодулятор сигналов с квадратурной амплитудной манипуляцией | 2015 |
|
RU2628427C2 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С МНОГОПОЗИЦИОННОЙ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2021 |
|
RU2776968C1 |
| Цифровой демодулятор сигналов с двухуровневой амплитудно-фазовой манипуляцией и относительной оценкой амплитуды символа | 2022 |
|
RU2790140C1 |
Изобретение относится к области радиотехники и может быть использовано в устройствах приема цифровых информационных сигналов для цифровой некогерентной демодуляции четырехпозиционных сигналов с относительной фазовой манипуляцией (ОФМ4 или QPSK). Технический результат - обеспечение высокоскоростной цифровой демодуляции сигналов с четырехпозиционной относительной фазовой манипуляцией. Цифровой некогерентный демодулятор четырехпозиционных сигналов с относительной фазовой манипуляцией содержит аналого-цифровой преобразователь, регистр сдвига многоразрядных кодов на четыре отсчета, первый и второй n-каскадные каналы квадратурной обработки сигналов, генератор тактовых импульсов, первое и второе регистровые запоминающие устройства, первый, второй, третий и четвертый цифровые умножители, первое и второе суммирующее устройство, первое и второе вычитающее устройство, первое и второе решающее устройство и декодер. 5 ил.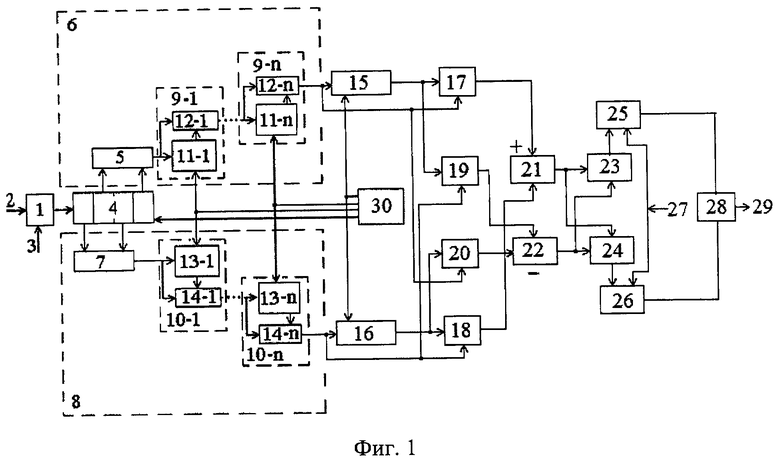
Цифровой некогерентный демодулятор четырехпозиционных сигналов с относительной фазовой манипуляцией, содержащий аналого-цифровой преобразователь (АЦП), регистр сдвига многоразрядных кодов на четыре отсчета, первый и второй n-каскадные каналы квадратурной обработки (ККО) сигналов и генератор тактовых импульсов (ГТИ), отличающийся тем, что он дополнительно содержит первое и второе регистровые запоминающие устройства (РЗУ), первый, второй, третий и четвертый цифровые умножители (ЦУ), первое и второе суммирующее устройство (СУ), первое и второе вычитающее устройство (ВУ), первое и второе решающее устройство (РУ) и декодер (ДК), выход первого ККО соединен с входом первого РЗУ и с первыми входами первого и третьего ЦУ, второй вход первого ЦУ соединен с выходом первого РЗУ, а второй вход третьего ЦУ - с выходом второго РЗУ, выход второго ККО соединен с входом первого РЗУ и с первыми входами второго и четвертого ЦУ, второй вход второго ЦУ соединен с выходом первого РЗУ, а второй вход четвертого ЦУ - с выходом второго РЗУ, выход первого ЦУ соединен с первым входом первого СУ, второй вход которого соединен с выходом четвертого ЦУ, выход второго ЦУ соединен с первым входом первого ВУ, второй вход которого соединен с выходом третьего ЦУ, выход первого СУ подключен к первым входам второго ВУ и второго СУ, а выход первого ВУ подключен к вторым входам второго ВУ и второго СУ, выход второго ВУ соединен с входом первого РУ, а выход второго СУ - с входом второго РУ, выходы первого и второго РУ соединены с первым и вторым входами декодера ДК для формирования двух двоичных разрядов выходного сигнала демодулятора.
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2011 |
|
RU2505922C2 |
| НЕКОГЕРЕНТНЫЙ ЦИФРОВОЙ ДЕМОДУЛЯТОР "В ЦЕЛОМ" КОДИРОВАННЫХ СИГНАЛОВ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2014 |
|
RU2556429C1 |
| УСТРОЙСТВО ДЛЯ НЕКОГЕРЕНТНОЙ ДЕМОДУЛЯЦИИ ЧАСТОТНО-МАНИПУЛИРОВАННЫХ СИГНАЛОВ С НЕПРЕРЫВНОЙ ФАЗОЙ | 2005 |
|
RU2308165C1 |
| УСТРОЙСТВО ПРИЕМА И ПЕРЕДАЧИ ФАЗОМАНИПУЛИРОВАННЫХ КОДОВЫХ СИГНАЛОВ | 2002 |
|
RU2236086C2 |
| RU 159121 U1, 27.01.2016 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСОВЫХ ХАРАКТЕРИСТИК ДОСТОВЕРНОСТИ ДЛЯ ОБРАБОТКИ ПРИНЯТЫХ МНОГОПОЗИЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2339164C1 |
| Устройство для приема дискретной информации | 1972 |
|
SU449452A2 |
| ВЫСОКОСКОРОСТНАЯ КАМЕРА ЖДУЩЕГО ТИПА | 0 |
|
SU167430A1 |
| EP 1976285 A1, 01.10.2008 | |||
| EP 1628421 A2, 22.02.2006. | |||

