Предлагаемое изобретение относится к области электромашиностроения и может быть использовано в системах ориентации космических аппаратов в качестве исполнительного органа.
Известны кольцевые электродвигатели-маховики, предназначенные для той же цели, и состоящие из кольцевого маховика и трех электромагнитных опор.
Недостатками этого устройства является большое потребление мощности, определяемое использованием только электромагнитов, и недостаточная жесткость, так как осевая стабилизация осуществляется пассивным способом, например, за счет тангенциальных составляющих сил магнитного тяжения, возникающих при зубчатой форме полюсных наконечников.
Наиболее близким к предлагаемому является устройство, описанное в. В этом устройстве кольцевой маховик имеет выточки, благодаря которым образуются силы осевой стабилизации за счет неравномерности в осевом направлении рабочего зазора. Радиальная стабилизация осуществляется с помощью электромагнитов. Возбуждение магнитного потока через зубцы, образованные выточками, осуществляется с помощью обмотки, через которую пропускается постоянный ток. Данное устройство обладает теми же недостатками, что и предыдущее.
Целью предлагаемого изобретения является повышение жесткости радиально-осевой стабилизации и уменьшение потребляемой мощности.
Поставленная цель достигнута тем, что каждая из трех электромагнитных опор маховика выполнена в виде конструкции с двумя электромагнитами радиальной стабилизации, одного электромагнита осевой стабилизации и одного постоянного магнита. Магнитопроводы электромагнитов радиальной стабилизации охватывают с зазорами со стороны торцов края кольцевого маховика. Магнитопровод электромагнита осевой стабилизации с зазорами охватывает с наружной стороны кольцевой выступ, расположенный на наружной поверхности маховика. Магнитопроводы электромагнитов радиальной стабилизации соединены ярмом, между внутренней поверхностью которого и наружной поверхностью электромагнита осевой стабилизации расположен постоянный магнит.
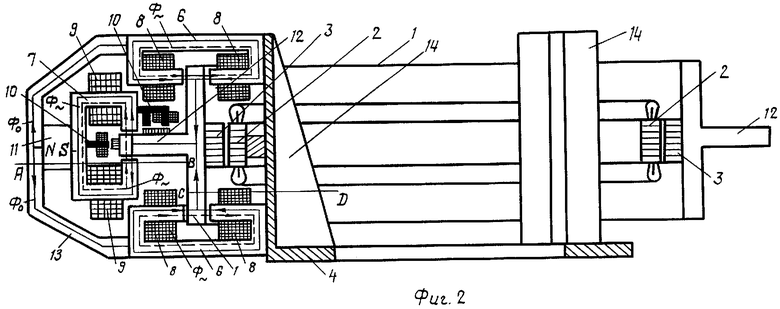
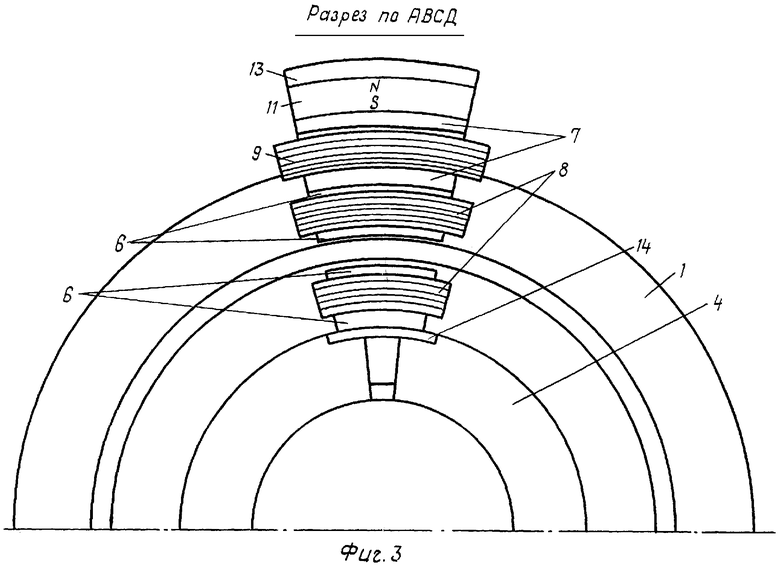
Общий вид кольцевого электродвигателя-маховика (КЭДМ) дан на фиг.1, где вид сверху показан на фиг.1а, а вид сбоку - на фиг.1б; на фиг.2 приведен диаметральный разрез по электромагнитной опоре. На фиг.3 дан ступенчатый разрез по линии АВСД, показанной на фиг.2. Масштаб изображения на фиг.1 в 2 раза меньше, чем на фиг.2 и 3.
КЭДМ состоит из кольцевого маховика 1, статора 2 и ротора 3 двигателя, основания 4 и трех электромагнитных опор 5. В состав каждой из этих опор входят электромагниты радиальной и осевой стабилизации, которые содержат магнитопроводы 6 и 7, а также обмотки 8 и 9 соответственно; позиционные датчики 10 и постоянный магнит 11. Позиционные датчики показаны на фиг.2; на фиг. 1б они также должны быть видны, но для упрощения рисунка они не показаны. Это мотивируется тем, что расположение позиционных датчиков в отличительные признаки устройства не входит.
Магнитопроводы 6 электромагнитов радиальной стабилизации охватывают с зазорами края кольцевого маховика 1 (фиг.2), причем каждый из магнитопроводов 6 образует с кольцом маховика два рабочих зазора: с внутренней и наружной поверхностями кольца. В зоне рабочего зазора находится не вся поверхность маховика, а лишь его края, площадь которых перекрывается поверхностями разреза магнитопроводов 6.
Края маховика охвачены магнитопроводами со стороны торцевых поверхностей кольца 1.
Магнитопровод 7 электромагнита осевой стабилизации с зазорами охватывает с наружной стороны кольцевой выступ 12, расположенный на внешней поверхности кольца 1 (фиг.1, 2). Магнитопроводы 6 электромагнитов радиальной стабилизации (на фиг.2 верхний и нижний) соединены ярмом 13. Между внутренней поверхностью этого ярма (обращенной внутрь магнитной опоры) и наружной поверхностью магнитопровода 7 установлен постоянный магнит 11, соприкасающийся с указанными поверхностями разноименными полюсами. На фиг.2 полюс S касается наружной поверхности магнитопровода 7, а полюс N - внутренней поверхности ярма 13. Электромагнитные опоры крепятся к основанию 4 с помощью стоек 14.
На фиг.1-3 не показаны элементы крепления и конструкции для упрощении понимания сущности предложения. Разрез по АВСД (фиг.2), показанный на фиг.3 выбран так, чтобы показать вид сверху элементов 6, 8 и 7, 9 электромагнитов. На фиг.3 магнитопроводы 6, 7 имеют форму сегментов, однако, они могут иметь и иную форму.
Устройство работает следующим образом. Стабилизирующие силы возникают в результате прохождения магнитных потоков через упоминавшиеся рабочие зазоры. Постоянный магнит 11 создает поток 2 Ф0 (фиг.2), который в ярме 13 разделяется на два потока Ф0, имеющих разные направления. Оба потока Ф0 поступают в магнитопроводы 6, а затем через рабочие зазоры попадают в кольцевой маховик 1, как показано на фиг.2 сплошными линиями со стрелками. В кольце 1 потоки Ф0 соединяются и проходят в выступ 12, а далее снова разветвляются и проходят в противоположных направлениях через рабочие зазоры, образованные боковыми поверхностями выступа 12 и поверхностями разреза магнитопровода 7, а далее замыкаются на полюс S магнита. Обмотки 8 и 9 электромагнитов создают магнитные потоки Ф˜, которые замыкаются по магнитопроводам 6 и 7 соответственно, проходя через рабочие зазоры в одном направлении, как показано на фиг.2 пунктирными линиями. В рабочих зазорах потоки Ф0 и Ф˜ алгебраически суммируются. Например, в верхнем и нижнем зазорах магнитопровода 7 образуются соответственно потоки:
Фв=Ф0+Ф˜
Фн=Ф0-Ф˜,
так как в верхнем зазоре потоки Ф0 и Ф˜ натравлены согласно, а в нижнем зазоре - встречно. Силы магнитного притяжения от потоков Фв и Фн так же, как эти потоки, направлены встречно и алгебраически суммируются, в результате чего к выступу 12 приложена сила
F=k(Ф0+Ф˜)2-k(Ф0-Ф˜)2=4kФ0ф˜,
направление которой совпадает с направлением потока Ф˜. В свою очередь, величина и направление потока Ф˜ определяется величиной и направлением тока в обмотках 9, который задается системой регулирования, работающей по сигналу датчика 10. Принцип действия и схемы таких систем широко описаны в литературе, и поэтому система регулирования не включена в состав предлагаемого устройства. Три электромагнитные опоры 5 создают три силы, приложенные к кольцу в трех точках и направленные против силы тяжести, что обеспечивает "всплытие" кольца в осевом направлении и устойчивую стабилизацию в некотором нейтральном положении.
Система радиальной стабилизации работает аналогично. В магнитопроводах 6 разветвляются потоки Ф0, поэтому в рабочих зазорах суммируются потоки  и
и  в результате чего каждый электромагнит развивает силу F=kФ0Ф˜. Так как силы обоих электромагнитов приложены к краям кольцевого маховика в одинаковом направлении, то они суммируются, в результате чего к кольцевому маховику в радиальном направлении приложена сила F=2kФ0Ф˜. При направлениях Ф0 и Ф˜, указанных на фиг.2, сила F направлена справа налево. С помощью системы регулирования, работающей по сигналам датчиков 10, действующих по радиусу 1, достигается устойчивая стабилизация маховика в радиальном направлении. Так как электромагнитные опоры расположены под углом 120° друг к другу, то кольцевой маховик устойчиво стабилизируется во всех радиальных направлениях.
в результате чего каждый электромагнит развивает силу F=kФ0Ф˜. Так как силы обоих электромагнитов приложены к краям кольцевого маховика в одинаковом направлении, то они суммируются, в результате чего к кольцевому маховику в радиальном направлении приложена сила F=2kФ0Ф˜. При направлениях Ф0 и Ф˜, указанных на фиг.2, сила F направлена справа налево. С помощью системы регулирования, работающей по сигналам датчиков 10, действующих по радиусу 1, достигается устойчивая стабилизация маховика в радиальном направлении. Так как электромагнитные опоры расположены под углом 120° друг к другу, то кольцевой маховик устойчиво стабилизируется во всех радиальных направлениях.
Так как в предлагаемом устройстве электромагниты активной стабилизации установлены как по радиальному, так и по осевому направлениям, то высокая жесткость стабилизации обеспечивается не только в радиальном, но и в осевом направлении, чего нет в прототипе.
Благодаря использованию постоянного магнита, поток которого в предложенной конструкции проходит через все четыре рабочих зазора, достигается экономия мощности за счет уменьшения потока Ф˜, a, следовательно, и тока через обмотку электромагнита по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный подвес двигателя-маховика | 1986 |
|
SU1394334A1 |
| Электромеханический исполнительный орган системы ориентации искусственного спутника Земли | 2016 |
|
RU2649560C2 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ РАЗГРУЗКИ РАДИАЛЬНЫХ ОПОР | 2007 |
|
RU2357121C1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829315C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| ЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2012 |
|
RU2505916C2 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОЙ РАЗГРУЗКИ РАДИАЛЬНЫХ ПОДШИПНИКОВ | 2001 |
|
RU2207455C2 |
| Бесконтактная торцовая синхронная машина | 1989 |
|
SU1720127A1 |
Изобретение относится к области электромашиностроения. Кольцевой электродвигатель - маховик может применяться в качестве исполнительного органа систем ориентации и стабилизации космических препаратов и содержит в своем составе кольцевой маховик, электродвигатель, основание и три электромагнитных опоры. Технический результат - повышение жесткости осевой стабилизации маховика и уменьшение потребляемой мощности. Каждая электромагнитная опора выполнена в виде конструкции с двумя электромагнитами радиальной стабилизации, одного электромагнита осевой стабилизации и одного постоянного магнита. Магнитопроводы электромагнитов с зазорами охватывают края кольцевого маховика и специальный кольцевой выступ на его наружной поверхности. Постоянный магнит установлен между магнитопроводом электромагнита осевой стабилизации и ярмом, соединяющим магнитопроводы электромагнитов радиальной стабилизации. 3 ил.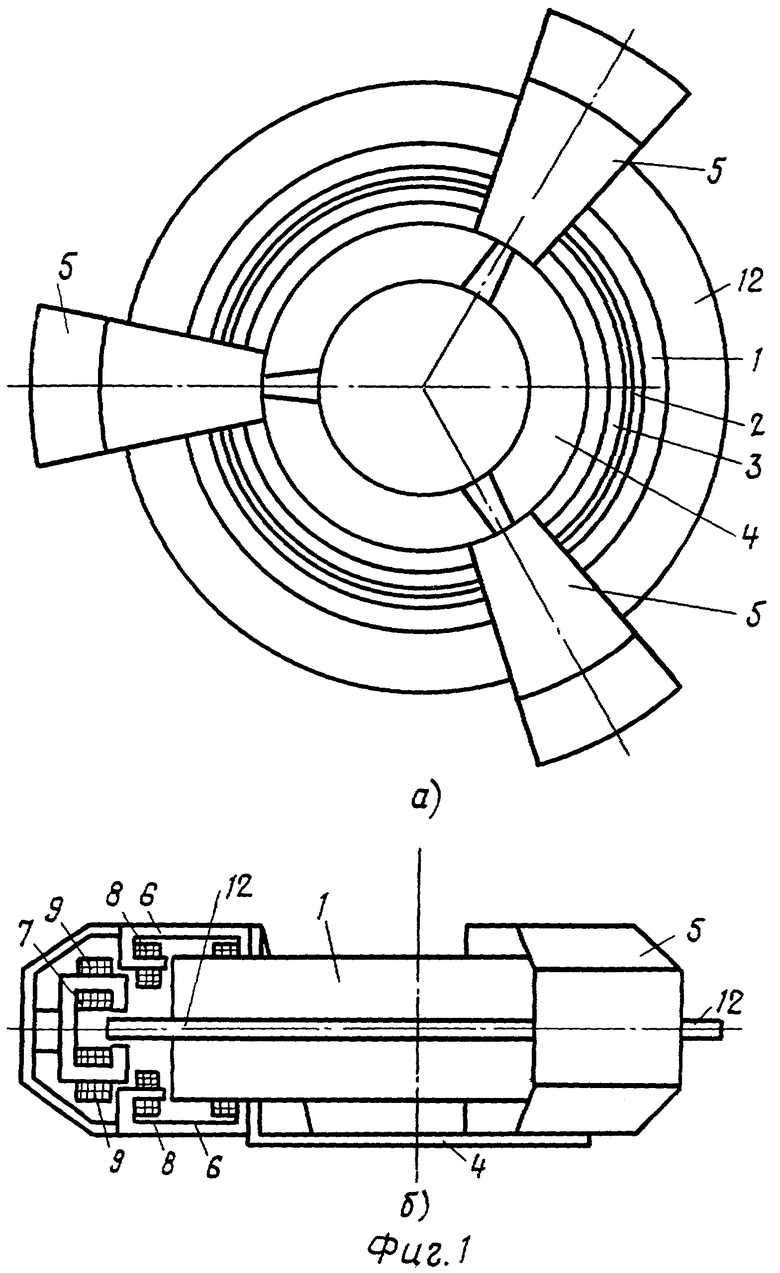
Электродвигатель-маховик, содержащий статор, ротор, кольцевой маховик, сопряженный с ротором, три электромагнитные опоры, состоящие из позиционных датчиков, блоков управления и электромагнитов радиальной и осевой стабилизации, снабженных магнитопроводами с обмотками возбуждения, отличающийся тем, что, с целью повышения энергетических характеристик каждая электромагнитная опора выполнена в виде двух электромагнитов радиальной стабилизации, одного электромагнита осевой стабилизации и постоянного магнита, маховик снабжен кольцевым выступом, расположенным с наружной поверхности по центру маховика, а каждая электромагнитная опора снабжена ярмом, соединяющим между собой магнитопроводы электромагнитов радиальной стабилизации, которые охватывают маховик с торцов и обращены рабочими поверхностями к наружной и внутренней цилиндрической поверхности маховика, а магнитопровод электромагнита осевой стабилизации охватывает кольцевой выступ, а между его наружной поверхностью и внутренней поверхностью ярма расположен постоянный магнит, соприкасающийся с указанными поверхностями разноименными полюсами.
| Ю.А.Осокин и др | |||
| Теория и применение магнитных подвесов | |||
| Л.: Машиностроение, 1980. |

