Изобретение относится к области оптико-электронного приборостроения и предназначено для применения в системах управления движением (СУД) космического аппарата (КА) для уточнения параметров орбиты и ориентации космического аппарата.
Актуальность выполнения автономных навигационных астроизмерений при дальних космических полетах для уточнения параметров орбиты КА хорошо известна и подтверждена при полетах КА «Apollon» к Луне. Описание способа и средства автономных навигационных астроизмерений приведено в книгах, например, Воробьев Л.М. Астрономическая навигация летательных аппаратов. Изд. Машиностроение, 1968; «Навигация, наведение и стабилизация в космосе», изд. «Машиностроение», Москва, 1970.
Наиболее известным навигационным параметром, который измеряется оптическими средствами для уточнения параметров орбиты, это измерение углового расстояния между известной (опознанной) звездой и видимым горизонтом планеты.
В настоящее время практически все системы управления движением КА содержат астродатчики (звездные датчики), программное обеспечение которых позволяет определять угловое расстояние между звездами, попадающими в поле зрения астродатчика, и опознавать звезды для определения ориентации КА в пространстве (см.: Сборник трудов ИКИ РАН, Четвертая Всероссийская научно-техническая конференция, Москва, ИКИ РАН, 2015 г., Г.А. Аванесов, Р.В. Бессонов, А.А. Форш, М.И. Куделин, «Анализ современного состояния и перспектив развития приборов звездной ориентации семейства БОКЗ», с. 1).
Описание астродатчиков (или звездных датчиков) приведено в различной технической литературе: например, сборник трудов ИКИ РАН, Всероссийская научно-техническая конференция, Таруса, 2008 г., С.А. Дятлов, Р.В. Бессонов, «Обзор звездных датчиков ориентации космических аппаратов».
За аналог предлагаемого устройства могут быть приняты астродатчики семейства БОКЗ разработки ИКИ РАН.
Однако недостатком известных астродатчиков является то, что для выполнения навигационных измерений (таких как - измерение углового расстояния между звездой и видимым горизонтом Земли, Луны) известные астродатчики не пригодны, т.к. динамический диапазон фотоприемника современных астродатчиков не позволяет одновременно регистрировать объекты, освещенность от которых отличается более чем на 3÷5 порядков. Например, динамический диапазон современного, широко применяемого в космической отрасли астродатчика SED 26 фирмы SODERN (Франция) составляет ~103, а соотношение освещенностей от звезды (+1 зв. величина) и от освещенного Солнцем горизонта Земли составляет ~107÷109.
В качестве прототипа предлагаемого устройства может быть описанный в статье «Звездный датчик для целей автономной навигации в дальнем космосе» из сборника «Всероссийская научно-техническая конференция Современные проблемы определения ориентации и навигации космических аппаратов» Таруса 22-25 сентября 2008 г.
Компоновка звездного датчика включает два зеркальных объектива, выполненных по трехзеркальной схеме, бленды, два ПЗС фотоприемника, изображения с которых обрабатываются в бортовом компьютере.
К недостаткам прототипа можно отнести: необходимость наличия двух прецизионных телескопов, наличие сложных асферических, в том числе и внеосевых зеркал, необходимость проведения на орбите сеансов взаимных котировочных наблюдений обоими телескопами, невозможности одновременного наблюдения обоих объектов (навигационных звезд и планеты), о чем пишут авторы.
Указанные проблемы решены в предлагаемом устройстве.
Задачей настоящего изобретения является повышение эргономических характеристик и расширение функциональных возможностей устройства.
Технический результат достигается тем, что в устройство для автономного определения навигационных параметров и параметров ориентации пилотируемого космического корабля, содержащем объектив, бленды, матричный фотоприемник, связанный с блоком определения навигационных параметров и параметров ориентации, в отличие от известного, введен оптический блок сопряжения непересекающихся участков звездного неба, выполненный в виде призменного блока, у которого выходная и одна из входных граней параллельны плоскости стекла иллюминатора и перпендикулярны оптической оси объектива, расположенного за выходной гранью призменного блока, а другая входная грань перпендикулярна направлению на участок звездного неба с навигационными звездами, при этом светоделительная поверхность внутри призменного блока расположена под углом к оптической оси объектива, а на часть выходной грани призменного блока нанесено зеркальное покрытие площадью, соответствующей сечению углового поля с участком звездного неба с навигационными звездами, лежащего в плоскости выходной грани призменного блока, при этом линия пересечения плоскости, в которой лежит светоделительная поверхность, с плоскостью, в которой лежит выходная грань призменного блока, перпендикулярна оптической оси объектива, перед входным окном призменного блока, перпендикулярным оптической оси объектива расположен светофильтр, а на выходной грани призменного блока установлен коллиматор со светоделительным кубиком, светоделительная грань которого расположена под заданным углом к оптической оси объектива.
Технический результат достигается за счет обеспечения возможности выполнения устройством режима навигационных измерений, таких как: измерение угловых расстояний между опознанными звездами и горизонтом планеты, освещенность от которой значительно превышает освещенность от звезд, а также режима по определению ориентации (положения системы координат) пилотируемого КА (ПКА) в пространстве.
Суть изобретения поясняется графическими материалами:
фиг. 1 - схема предлагаемого устройства;
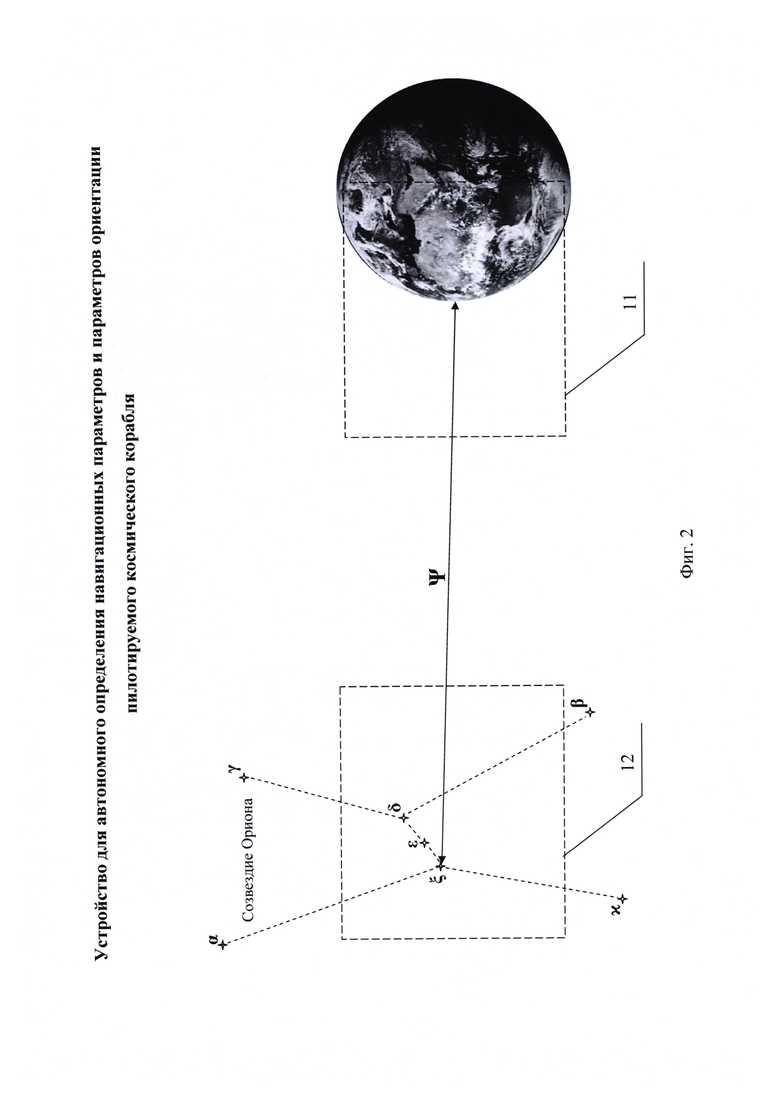
фиг. 2 - изображения двух непересекающихся участков звездного неба;
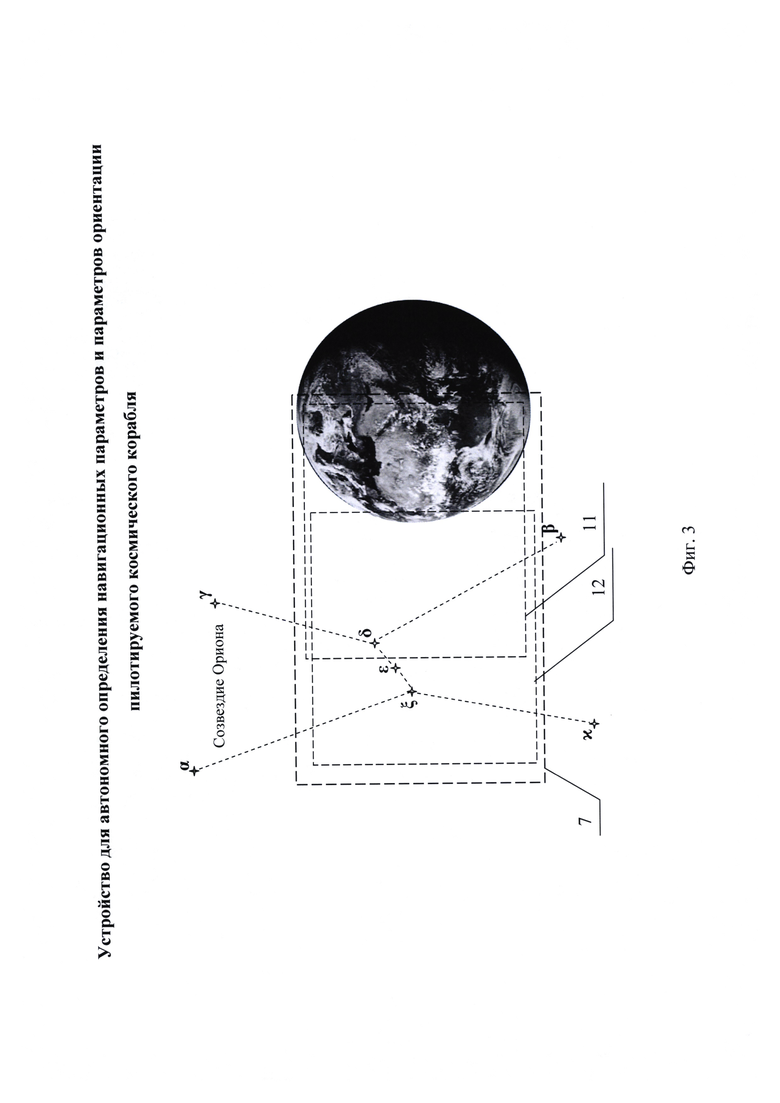
фиг. 3 - изображение горизонта планеты и звезд на фотоприемнике;
фиг. 4 - фотография экспериментальной установки;
фиг. 5 - снимок, полученный на экспериментальной установке;
фиг. 6 - изображение приборной системы координат и автоколлимационного блика на фотоприемнике;
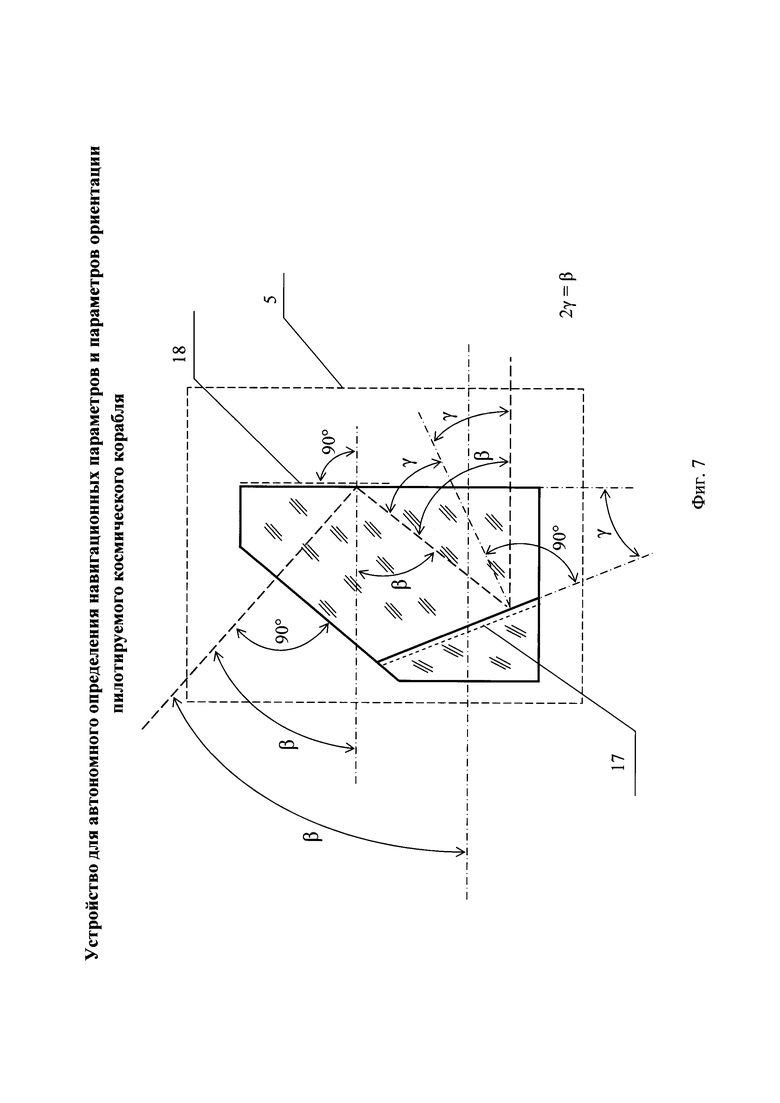
фиг. 7 - оптический блок сопряжения.
Перечень позиций:
1 - направление на участок звездного неба с горизонтом планеты;
2 - направление на участок звездного неба с навигационными звездами;
3 - бленда;
4 - светофильтр;
5 - оптический блок сопряжения (ОБС);
6 - объектив;
7 - матричный фотоприемник (МФ);
8 - вычислительное устройство (блок определения навигационных параметров и параметров ориентации);
9 - интерфейс сопряжения с системой управления движением (СУД) ПКА;
10 - корпус устройства;
11 - поле зрения устройства для участка звездного неба с горизонтом планеты;
12 - поле зрения устройства для участка звездного неба с навигационными звездами;
13 - пример крепления устройства на ПКА;
14 - прецизионный иллюминатор;
15 - коллиматор;
16 - светящаяся марка (сетка) коллиматора;
17 - светоделительная грань оптического блока сопряжения;
18 - зеркальное покрытие на выходной грани оптического блока сопряжения;
19 - отражающее покрытие на поверхности внутреннего стекла иллюминатора;
20 - герметизирующие прокладки иллюминатора;
21 - входные грани оптического блока сопряжения;
22 - выходная грань оптического блока сопряжения;
23 - система управления движением ПКА;
24 - средство отображения;
25 - имитатор горизонта планеты.
Устройство расположено внутри гермоотсека (ГО) ПКА перед иллюминатором 14, на минимально возможном расстоянии, чтобы не было экранирования полей зрения 11 и 12 устройства. Перед входными гранями 21 призменного блока 5 расположены бленды 3 для уменьшения фоновых засветок. В поле зрения 11 между блендой 3 и входной гранью 21 призменного блока 5, параллельной плоскости стекла иллюминатора, расположен светофильтр 4. Светоделительная поверхность 17 расположена внутри призменного блока 5. На верхней части выходной грани 22 призменного блока 5 имеется зеркальное покрытие 18, обеспечивающее полное отражение лучей углового поля 12 в направлении светоделительной поверхности 17, которая отражает их в объектив 6, расположенный за выходной гранью 22. Оптическая ось объектива 6 перпендикулярна выходной грани 22 призменного блока 5. Зеркальное покрытие 18 нанесено на верхнюю часть выходной грани 22 так, что не экранирует лучи углового поля 11. В фокальной плоскости объектива 6 расположен матричный фотоприемник 7. На нижней части выходной грани 22 призменного блока 5 расположен коллиматор 15. Светоделительный кубик коллиматора 15 имеет светоделительную грань, расположенную под углом 45° к оптической оси объектива 6 и к поверхности выходной грани 22 призменного блока 5. Для исключения отражений от второй поверхности внутреннего стекла иллюминатора и от поверхностей внешнего стекла иллюминатора, в ходе лучей коллиматора на части внутренней поверхности стекла иллюминатора нанесено отражающее покрытие 19. Изображение сетки 16 коллиматора 15 на матричном фотоприемнике 7, построенное объективом 6 после отражения лучей коллиматора 15 от светоделительного кубика и отражающего покрытия 19 на поверхности стекла иллюминатора, предназначено для привязки системы координат устройства к системе координат ПКА.
Угол между светоделительной поверхностью 17 и выходной гранью призменного блока 5 с нанесенным зеркальным покрытием 18 равен γ, как показано на фиг. 7. В соответствии с законами геометрической оптики (угол падения равен углу отражения луча от плоской зеркальной поверхности) и взаимному расположению светоделительной 17 и зеркальной 18 поверхностям в призменном блоке 5 имеем 2γ=β.
Применение дополнительной призмы, плоскость входного окна которой параллельна плоскости выходного окна на грани 22 призменного блока, необходимо, чтобы исключить оптический клин в ходе лучей, приводящий к хроматическим аберрациям (угол преломления лучей зависит от длины волны) в изображении на матричном фотоприемнике 7.
Применение призменного блока 5 обеспечивает точность и стабильность взаимного расположения отражательной 18 и светоделительной 17 поверхностей в оптическом блоке сопряжения 5.
Изображение, зарегистрированное матричным фотоприемником 7, подвергается обработке в блоке определения навигационных параметров и параметров ориентации 8, где производится опознавание звезд, вычисление навигационных параметров и параметров ориентации. Полученные данные через интерфейс связи 9 передаются в СУД ПКА 23.
Для проверки возможности реализации предлагаемого изобретения в части одновременной регистрации на фотоприемнике яркой планеты и звезд создана лабораторная экспериментальная установка с использованием прецизионного иллюминатора станции «Мир». Вид установки представлен на фиг. 4. В качестве планеты использовалась светящаяся сфера с яркостью около 15000 кд/м2, что ориентировочно соответствует яркости освещенного горизонта Земли; звезда имитировалась точечным источником света, создающим освещенность в плоскости иллюминатора, соответствующую +1 зв. величине. В первом канале устройства применялся светофильтр 1000 крат. В качестве объектива и приемника использовалась компактная цифровая фотокамера.
На фотографии, представленной на фиг. 5, полученной на указанной установке, хорошо видно изображение имитатора горизонта планеты и звезды, что подтверждает возможность достижения технического результата по одновременной регистрации на фотоприемнике звезды и освещенного горизонта планеты при работе в режиме навигационных измерений.
Вычисление углового расстояния между опознанной звездой и горизонтом планеты выполняется программным обеспечением устройства, например, следующим образом:
За систему координат устройства принимается правая прямоугольная система координат OXYZ, у которой ось OZ перпендикулярна плоскости приемника, совпадает с оптической осью объектива и направлена от центра приемника в сторону звезд. Ось ОХ параллельна горизонтальной стороне, а ось OY параллельна вертикальной стороне приемника. В этой системе координат вычисляется массив координат точек на линии видимого горизонта планеты (Земля) по изображению на приемнике. Затем вычисляются координаты выбранной (известной) звезды по изображению на приемнике с учетом того, что направление 2 отклонено от оси OZ на угол β (см. Фиг. 1) в плоскости ZOY путем решения системы линейных уравнений:

где Х1, Y1, Z1 - координаты звезды в системе координат устройства;
Х2, Y2, Z2 - координаты звезды в системе координат устройства, развернутой вокруг оси ОХ на угол β;
коэффициенты:

Следующим действием в вычислениях является определение массива значений угловых расстояний между выбранной звездой и точками на линии горизонта, вычисленные ранее.
Из полученного массива значений углов между выбранной звездой и точками горизонта планеты выбирается наименьший угол.
По определению: минимальный угол, образованный линией ПКА-звезда и ПКА-точка на горизонте планеты, лежит в плоскости звезда-ПКА-центр планеты (этот угол и является навигационным параметром).
Для других звезд, попавших в поле зрения направления 2 и опознанных (известных), проводятся вычисления по приведенному выше алгоритму.
При работе системы в режиме определения ориентации ПКА по звездам, она должна быть жестко установлена в ГО ПКА перед иллюминатором, например с помощью кронштейна 13 (см. фиг. 1).
Положение поверхности иллюминатора 19 относительно системы координат ПКА определено при наземной подготовке ПКА.
При работе в режиме определения ориентации эффективность наблюдения звезд снизится на величину коэффициента пропускания светоделительной поверхности 17 оптического блока сопряжения 5. Значение снижения эффективности в звездной величине Δm вычисляется по формуле

где m1 - видимая зв. величина звезды без светоделительного зеркала;
m2 - видимая зв. величина звезды со светоделительным зеркалом;
E1 - освещенность, создаваемая звездой в плоскости наблюдения при отсутствии ослабляющих элементов;
Е2 - освещенность, создаваемая звездой в плоскости наблюдения при наличии светоделительного зеркала.
При использовании полупрозрачного светоделительного зеркала E2=0,5 E1. Подставив эти значения в формулу (3), получим:

Т.е. снижение эффективности наблюдений Δm≈0,75 зв. величины.
В случае, если коэффициент отражения светоделительной поверхности равен Котр=0,8, то Е2=0,8 Е1, a Δm≈0,24 зв. величины.
При использовании устройства только для навигационных измерений (измерение углового расстояния между звездой и горизонтом планеты) жесткой установки ее на ПКА не требуется и, например, при пилотируемых полетах измерения может выполнять космонавт через прецизионный иллюминатор ПКА, как это показано на фиг. 4.
Устройство может быть использовано и как два астродатчика, если вместо светофильтра 4 установить электронный затвор как в фотокамерах, перед каждой из входных граней 21 оптического блока сопряжения 5. Для регистрации звезд по одному из направлений должен открываться соответствующий затвор (другой затвор должен быть закрыт). Необходимое условие для работы модернизированного устройства в данной схеме - отсутствие планеты в поле зрения.
Навигационные измерения через иллюминатор космонавтами предусматривались при подготовке программы Л-1 (пилотируемый облет Луны) в советское время (1965-1975 гг.) с помощью секстанта. Описание навигационных измерений через прецизионный иллюминатор КА приведено в книге «Основы проектирования космических секстантов» Николаев А.Г., Забелина И.А., Романтеев Н.Ф., Рудаков В.П., с. 141, 169. Изд. «Машиностроение», 1978 г.
Предлагаемое изобретение может быть использовано при дальних пилотируемых полетах, например, к Луне и другим планетам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Углоизмерительный прибор | 2018 |
|
RU2682842C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ЗВЕЗДНЫЙ ПРИБОР | 2010 |
|
RU2442109C1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2470258C1 |
| Система калибровки и тестирования звездного датчика ориентирования | 2023 |
|
RU2811666C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ЗВЕЗДНЫЙ ПРИБОР | 2009 |
|
RU2399871C1 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЗВЕЗД | 2013 |
|
RU2535247C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЗВЕЗД | 2009 |
|
RU2408849C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |




Устройство для автономного определения навигационных параметров и параметров ориентации пилотируемого космического корабля содержит оптический блок сопряжения, выполненный в виде призменного блока, позволяющий одновременно наблюдать два непересекающихся участка звездного неба, одного с навигационными звездами, а другого с горизонтом планеты. За выходным окном призменного блока расположен объектив для формирования изображения на матричном фотоприемнике, связанным с блоком определения навигационных параметров и параметров ориентации. Для защиты от засветки ярким горизонтом планеты установлен светофильтр. Технический результат заключается в повышении эргономических характеристик устройства для автономного определения навигационных параметров и параметров ориентации пилотируемого космического корабля. 7 ил.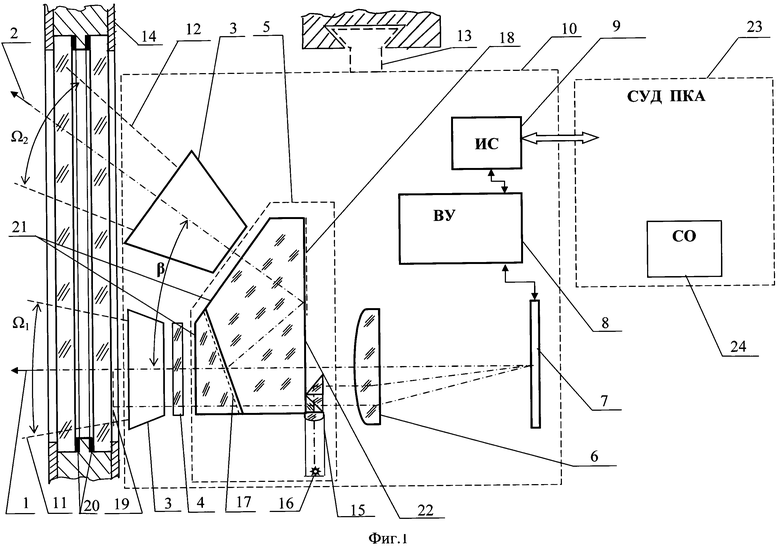
Устройство для автономного определения навигационных параметров и параметров ориентации пилотируемого космического корабля, содержащее объектив, бленды, матричный фотоприемник, связанный с блоком определения навигационных параметров и параметров ориентации, отличающееся тем, что в него введен оптический блок сопряжения непересекающихся участков звездного неба, выполненный в виде призменного блока, у которого выходная и одна из входных граней параллельны плоскости стекла иллюминатора и перпендикулярны оптической оси объектива, расположенного за выходной гранью призменного блока, а другая входная грань перпендикулярна направлению на участок звездного неба с навигационными звездами, при этом светоделительная поверхность внутри призменного блока расположена под углом к оптической оси объектива, а на часть выходной грани призменного блока нанесено зеркальное покрытие площадью, соответствующей сечению углового поля с участком звездного неба с навигационными звездами, лежащего в плоскости выходной грани призменного блока, при этом линия пересечения плоскости, в которой лежит светоделительная поверхность, с плоскостью, в которой лежит выходная грань призменного блока, перпендикулярна оптической оси объектива, перед входным окном призменного блока, перпендикулярным оптической оси объектива расположен светофильтр, а на выходной грани призменного блока установлен коллиматор со светоделительным кубиком, светоделительная грань которого расположена под заданным углом к оптической оси объектива.
| 0 |
|
SU154706A1 | |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЗВЕЗД | 2009 |
|
RU2408849C1 |
| JP 63246614 A 13.10.1988 | |||
| US 5337241 A1 09.08.1994. | |||

