Изобретение относится к области приборостроения, а именно к высокоточным комплексным навигационным системам с использованием астроизмерений, и применяется в составе бортового оборудования авиационно-космических объектов.
Навигационные приборы, основанные на измерении углового положения звезд относительно некоторых выделенных пространственных направлений давно известны, и широко используются в задачах управления и навигации наземных, морских, воздушных и космических подвижных объектов. Общее развитие электроники и вычислительной техники позволило создать и внедрить в широкое практическое использование бесплатформенные инерциальные навигационные системы, в которых определение навигационных параметров выполняется только за счет вычислительной обработки показаний первичных инерциальных датчиков угловой скорости и кажущегося ускорения в специализированных вычислительных устройствах (СВУ). Возможности СВУ позволяют не только обрабатывать показания инерциальных датчиков, но и вычислять интегрированную оценку навигационных параметров путем совместной обработки показаний навигационных датчиков различной физической природы. Состав датчиков в интегрированной навигационной системе выбирается так, чтобы недостатки одних датчиков компенсировались достоинствами других датчиков.
Известно что, большинство известных астрономических датчиков (астродатчиков) ориентации космического аппарата (КА), работающих на принципе распознавания наблюдаемого звездного образа, выполняют измерения ориентации с относительно небольшой частотой 1-10 Гц. При попадании в их поле зрения Солнца, Земли или Луны эти датчики кратковременно теряют возможность выполнять навигационные измерения, поскольку яркость указанных небесных тел многократно превосходит яркость любой из звезд, используемых для определения ориентации. Это делает невозможным обнаружение изображения такой звезды на фоне изображения яркого объекта. При достаточно быстрых поворотах КА хорошо локализованные изображения неподвижных навигационных звезд перестают быть локализованными и превращаются в протяженные изображения, по которым распределяется световая энергия звезды, попавшая на фотоприемник за время экспонирования. Обнаружение и определение растровых координат протяженных изображений (смазов) затруднено, что приводит ухудшению точности или даже к потере измерений астродатчика в течение всего времени поворота КА. Объединение астродатчика с бесплатформенным инерциальным измерительным модулем (ИИМ) позволяет преодолеть указанные недостатки астродатчика за счет высокой частоты выполнения измерений ИИМ и их полной независимости от внешних условий. Недостаток инерциальной системы, проявляющийся в неограниченном росте со временем ошибок определения ориентации, компенсируется высокой точностью (единицы угловых секунд) периодических астрономических измерений, используемых для коррекции интегрированной оценки ориентации.
Известно интегрированное астроинерциальное устройство навигации атмосферного летательного аппарата, объединяющее в единую конструкцию высокоточную бесплатформенную инерциальную навигационную систему (БИНС) с возможностью коррекции от приемника сигналов спутниковых навигационных систем, астродатчика и датчика направления на Солнце. В описываемой системе астрономический и инерциальный каналы независимо получают свои собственные навигационные измерения. Затем априорное навигационное решение астрономического канала передается в БИНС для коррекции накопленных ошибок инерциального канала, определения позиции и ориентации летательного аппарата [1].
Использование инерциальных измерений для обработки астрономических измерений в данном варианте не предполагается.
Известны варианты построения интегрированных астроинерциальных устройств ориентации, в которых астрономический канал объединен в единую конструкцию с векторным датчиком угловой скорости (ДУС), имеющим три некомпланарные оси чувствительности. В указанных интегрированных устройствах измерения ДУС используются для обнаружения условия вращения подвижного объекта, при которых астрономический канал сможет получить качественные изображения наблюдаемых звезд. Измерения ДУС используются для расчета приращения ориентации подвижного объекта за период получения кадров астрономического канала, что позволяет увеличить частоту выдачи измерений ориентации и выполнять накопление кадров астрономического канала, за счет которого улучшается его отношение сигнал/шум при небольших угловых скоростях вращения носителя. Измерения ДУС позволяют сократить время восстановления измерений ориентации астрономического канала после их потери вследствие засветки оптической системы Солнцем или Луной. Недостатком указанных вариантов астроинерциальных устройств является неполное использование измерений ДУС для обработки изображений астрономического канала, ограничивающее увеличение допустимой угловой скорости вращения носителя по сравнению с обычным астродатчиком [2, 3,4]. Известно интегрированное астроинерциальное устройство ориентации КА рассматриваемое в качестве прототипа. Этот вариант представляет собой единую конструкцию, объединяющую в себе астрономический измерительный канал на базе телевизионной камеры (ТВК) с полупроводниковым матричным фотоприемником (МФП), инерциальный измерительный канал из трех микромеханических ДУС и вспомогательных датчиков температуры, а также вычислительное устройство, на котором выполняется оптимальное комплексирование первичных измерительных каналов. В описываемом прототипе решалась задача построения малогабаритного малопотребляющего интегрированного датчика ориентации за счет общего снижения точности (σ=0,1°) интегрированной оценки ориентации и исключения возможности резервирования измерительных каналов. Снижение точности интегрированной оценки в прототипе возникает вследствие выбранного типа ДУС и увеличенных интервалов коррекции инерциальной оценки ориентации от астрономического канала. В прототипе предусмотрен режим самодиагностики, в котором астрономический канал включается на максимальную частоту выдачи измерений ориентации при сохранении длительности интервалов коррекции интегрированной оценки. Оценка работоспособности астро-инерциального датчика выполняется путем сравнения результатов дополнительных измерений от астрономического канала со значением интегрированной оценки, рассчитанной для момента времени измерения [5].
В схеме построения устройства интегрированного астро-инерциальной ориентации предлагаемой в выбранном прототипе, устраняется недостаток астрономического датчика ориентации, состоящий в низкой частоте следования астрономических измерений (1-10 Гц). Устранение этого недостатка выполняется за счет создания другого недостатка - общей потери точности интегрированных оценок на выходе прототипа. Точность низкочастотных измерений отдельного астродатчика имеет порядок десятков угловых секунд при измерении угла поворота (крена) датчика вокруг своей оптической оси и единиц угловых секунд при измерении бокового поворота вокруг перпендикулярного к ней направления. Точность интегрированной оценки на выходе прототипа, обновляющейся на частоте опроса ДУС, составляет 0,1°.
Другой недостаток астрономического измерительного канала -значительные габариты бленды, защищающей оптический тракт датчика от боковой солнечной засветки, в прототипе не устраняется. Габариты бленды определяются угловым полем зрения датчика (15°-25°), которое выбирается из обязательного требования одновременного нахождения в этом поле не менее трех звезд не слабее 5-й звездной величины. Третьим недостатков прототипа является отсутствие резервирования первичных измерительных каналов.
Известна астроинерциальная навигационная система, в которой реализуется способ вычисления текущих координат, скоростей и ориентации летательного аппарата. Коррекция «дрейфа нуля» и «ухода осей» осуществляется по показаниям астровизирующего устройства, входящего в состав астроинерциальной навигационной системы. Одними из основных методов решения задачи ориентации и автономной навигации космического аппарата в околоземном космическом пространстве являются методы инерциальной навигации, основанные на измерении составляющих кажущегося линейного ускорения движения космического аппарата акселерометрами и нахождения по этим измерениям линейной скорости его движения. Также инерциальные приборы обеспечивают измерение угловой скорости с применением гироскопических измерителей. В общем виде решение навигационной задачи с применением методов инерциальной навигации можно записать в виде:

где r - радиус вектор летательного аппарата в инерциальном пространстве;
g - вектор гравитационного ускорения в месте положения точки;
р - первичная информация, измеряемая датчиками кажущегося линейного ускорения;
Навигационное решение получается двукратным интегрированием выражения 1.
где  и r0 - это начальные значения вектора - априорная информация.
и r0 - это начальные значения вектора - априорная информация.
Накопление ошибок измерений, которое присуще любой, даже самой точной инерциальной системе, что обусловлено принципом ее работы, связанной с необходимостью постоянного интегрирования линейных ускорений и скоростей движения летательного аппарата (см. выражение 2), является основными недостатками методов инерциальной навигации. Другим существенным недостатком инерциальных систем является то, что для решения навигационной задачи требуется наличие априорной информации - константы  и r0 в выражении 2 [6].
и r0 в выражении 2 [6].
Известен способ и устройство астроинерциальной навигации, включающее стабилизированную платформу с тремя карданными подвесами, на которую установлено астровизирующее устройство с двумя степенями свободы, разработанное для слежения за звездами днем или ночью. Платформа несет два поплавковых гироскопа и три акселерометра. Астроинерциальный прибор соединен интерфейсом с цифровым вычислителем. Вычислитель хранит данные позиционирования для 61 звезды, реализует алгоритмы платформенной инерциальной системы и осуществляет коррекцию определенных инерциальной системой навигационных параметров по результатам астрономических измерений. Высокая точность астроинерциальных измерений обуславливается качеством привязки оси визирования звезд к местной вертикали, которая реализуется инерциальной навигационной системой посредством установки платформы в горизонтальное положение. Астрокоррекция уменьшает погрешность определения истинного курса летательного аппарата и ошибку ее позиционирования независимо от времени полета. Однако данным системам присущи существенные недостатки. Точность и надежность систем ограничивается большим количеством вращающихся рамок (не менее пяти), необходимостью ультравысокой точности от преобразователей, а также требованием регулярных наземных калибровок.
Дополнительно бортовые стабилизированные платформы включают контактные кольца рамок, которые увеличивают стоимость и сложность системы и уменьшают ее надежность [7]. Наиболее близким техническим решением, т.е. прототипом заявленного способа, является способ астроинерциальной навигации, основанный на формировании электрических сигналов от трех гироскопов и трех акселерометров, установленных на общем базовом основании и ориентированных соответственно по осям X, Y, Z трехмерной системы координат и электрического сигнала изображения отклика фотоприемника астровизора, который ориентирован на оптическое излучение от рабочей звезды, а также на формировании соответствующих этой ориентации электрических сигналов от датчиков угла крена и тангажа и формировании сигнала навигационных ошибок параметров.
Основными недостатками способа являются: повышенное энергопотребление, большая стоимость и ограниченная точность выходных параметров астроинерциальной навигационной системы [8]. Задачей настоящего изобретения является повышение точности выходных параметров астроинерциальной навигационной системы и повышении отказоустойчивости.
1. Поставленная цель достигается за счет того, что в способе астроинерциальной ориентации, основанном на формировании электрических сигналов от инерциальных датчиков, и электрического сигнала изображения от фотоприемника астровизора, согласно изобретению, перед началом процедуры обнаружения и распознавания звездного образа видеопотоки от оптических головок сначала формируются за счет указания координат областей считывания фотоприемных матриц, вычисленных на основе априорных координат звезд, накрываемых полями зрения оптических головок, и измерений датчиков угловых скоростей, а затем подвергается цифровой обработке с использованием измерений инерциальных датчиков угловой скорости.
2. Способ астроинерциальной ориентации по п. 1, согласно изобретению, видеопотоки от оптических головок формируются за счет явного указания координат областей считывания фотоприемных матриц, вычисленных на основе априорных координат звезд, накрываемых полями зрения оптических головок, и измерений датчиков угловой скорости, в результате чего из оптических головок вычитываются не полные кадры, а несколько областей интереса меньшего размера.
3. Способ астроинерциальной ориентации по п. 1, согласно изобретению, что цифровая обработка видеопотоков от оптических головок, предваряющая процедуру обнаружения и распознавания звездного образа, выполняется с использованием двумерного цифрового фильтра с конечной импульсной характеристикой, согласованной со смазанными изображениями неподвижных звезд, получаемыми за счет поворотов оптических головок во время экспонирования и синтезированной с учетом измерений инерциальных датчиков угловой скорости за время экспонирования.
4. Способ астроинерциальной ориентации по п. 1, согласно изобретению, что цифровая обработка видеопотоков от оптических головок, предваряющая процедуру обнаружения и распознавания звездного образа, выполняется с использованием геометрических преобразований отдельных изображений зон интереса, причем параметры преобразований рассчитываются с учетом измерений инерциальных датчиков угловой скорости, приведенных к моментам начала экспонирования преобразуемых кадров.
5. Способ астроинерциальной ориентации по п. 1, согласно изобретению, что выходные параметры ориентации приборной системы координат датчика относительно навигационной системы координат рассчитываются из априорной оценки вектора состояния комплексирующего фильтра с использованием дополнительной входной информации, получаемой от внешних источников.
6. Способ астроинерциальной ориентации по п. 1, согласно изобретению, что выходные параметры ориентации приборной системы координат датчика относительно навигационной системы координат рассчитываются из апостериорной оценки вектора состояния комплексирующего фильтра с использованием дополнительной входной информации, получаемой от внешних источников.
7. Устройство для реализации способа, содержащее единую механическую конструкцию три или более инерциальных датчиков, одну или более оптическую головку и вычислительное устройство, согласно изобретению, в качестве инерциальных датчиков угловой скорости используются волоконно-оптические гироскопы, в качестве оптических головок используются цифровые камеры узкого поля зрения, оснащенные сотовыми блендами, в качестве вычислительного устройства используется высокоскоростное вычислительное устройство.
Отличительными признаками предлагаемого устройства являются то, что в качестве инерциальных датчиков угловой скорости используются высокоточные волоконно-оптические гироскопы. Волоконно-оптические гироскопы являются высокоточными инерциальными датчиками с минимальными габаритами и при этом измеряющими пространственное положение объекта с высокой точностью и к настоящему времени по значениям шума, смещения нуля и временной стабильности превосходят своих традиционных конкурентов - кольцевые лазерные гироскопы [6]. В качестве оптических головок используются цифровые камеры узкого поля зрения, оснащенные сотовыми блендами. Такие ТВК позволяют осуществить защиту от боковой засветки. В качестве вычислительного устройства используется высокоскоростное вычислительное устройство (ВВУ). В таких ВВУ формирует видеопотоки от оптических головок и выполняет их цифровую обработку с целью увеличения частоты съема видеоинформации и повышения отношения сигнал/шум в обработанных кадрах с учетом измерений инерциальных датчиков угловой скорости. Также ВВУ обнаруживает отказы в оптических головках и в датчиках угловой скорости и изолирует отказавшие элементы, и выполняет задачу комплексирования результатов инерциальных и астрономических измерений.
Таким образом, что перед началом процедуры обнаружения и распознавания звездного образа видеопотоки от оптических головок сначала формируются, а затем подвергается цифровой обработке с использованием измерений инерциальных датчиков угловой скорости, за счет чего повышается частота кадров в видеопотоках и улучшается отношение сигнал/шум в обработанных изображениях. Видеопотоки от оптических головок могут формироваться за счет явного указания координат областей считывания фотоприемных матриц, вычисленных на основе априорных координат звезд, накрываемых полями зрения оптических головок, и измерений датчиков угловой скорости, в результате чего из оптических головок вычитываются не полные кадры, а несколько областей интереса меньшего размера. Цифровая обработка видеопотоков от оптических головок, предваряющая процедуру обнаружения и распознавания звездного образа таким образом может, выполняется с использованием двумерного цифрового фильтра с конечной импульсной характеристикой, согласованной со смазанными изображениями неподвижных звезд, получаемых за счет поворотов оптических головок во время экспонирования и синтезированной с учетом измерений инерциальных датчиков угловой скорости за время экспонирования. Предлагаемое устройство позволяет проводить цифровую обработку видеопотоков от оптических головок, тем самым предваряющая процедуру обнаружения и распознавания звездного образа, выполняется с использованием геометрических преобразований отдельных изображений зон интереса, причем параметры преобразований рассчитываются с учетом измерений инерциальных датчиков угловой скорости, полученных синхронно с моментами начала экспонирования преобразуемых кадров. В итоге выходные параметры ориентации приборной системы координат датчика относительно навигационной системы координат рассчитываются из априорной оценки вектора состояния комплексирующего фильтра с использованием дополнительной, получаемой от внешних источников. Устройство позволяет, таким образом, выходные параметры ориентации приборной системы координат датчика относительно навигационной системы координат рассчитываются из апостериорной оценки вектора состояния комплексирующего фильтра с использованием дополнительной, получаемой от внешних источников.
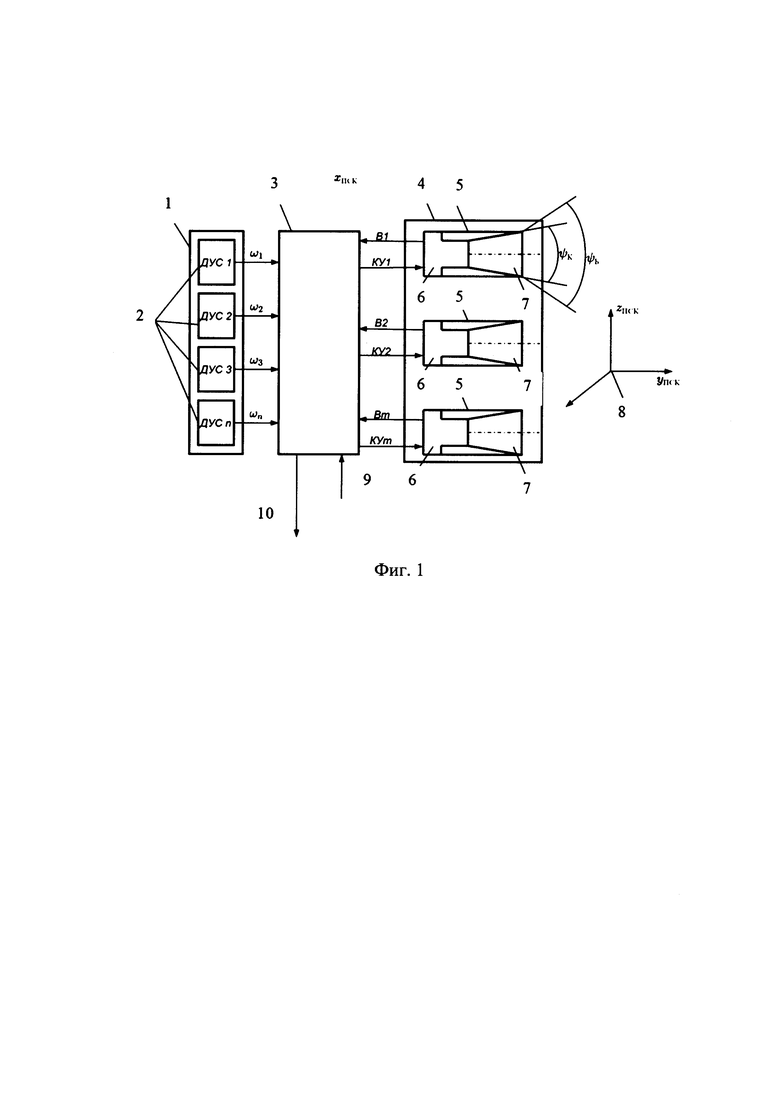
Таким образом, заявляемое устройство способствует повышение частоты измерений ориентации, уменьшении различия в точностях измерения углов крена и бокового поворота датчика, увеличении диапазона угловых скоростей вращения носителя и повышении отказоустойчивости датчика путем структурного резервирования отдельных компонент.Реализация заявленного астроинерциального навигационного устройства осуществляется на аппаратно-программном комплексе с использованием элементной базы компьютерной техники, современной микроэлектроники, а также путем использования элементов построения оптических систем и высокоточной механики. Структурная схема интегрированного астроинерциального устройства показана на фиг. 1.
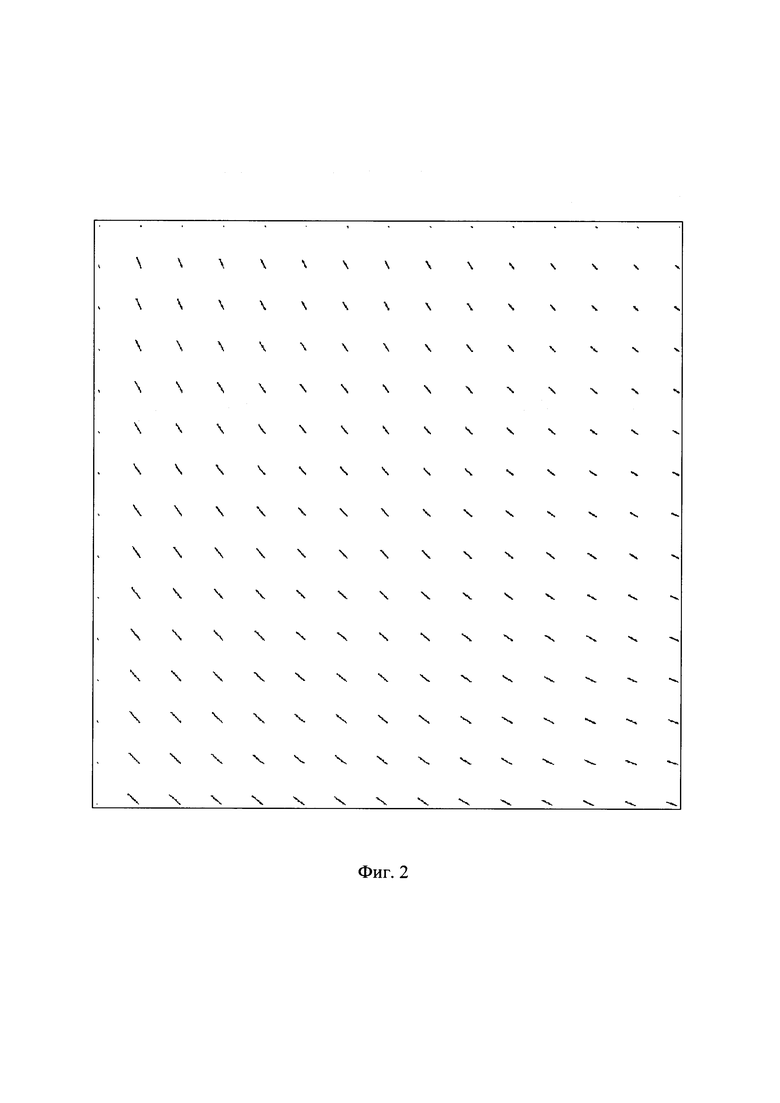
Формы смазанных изображений в различных точках плоскости МФП показаны на фиг. 2.
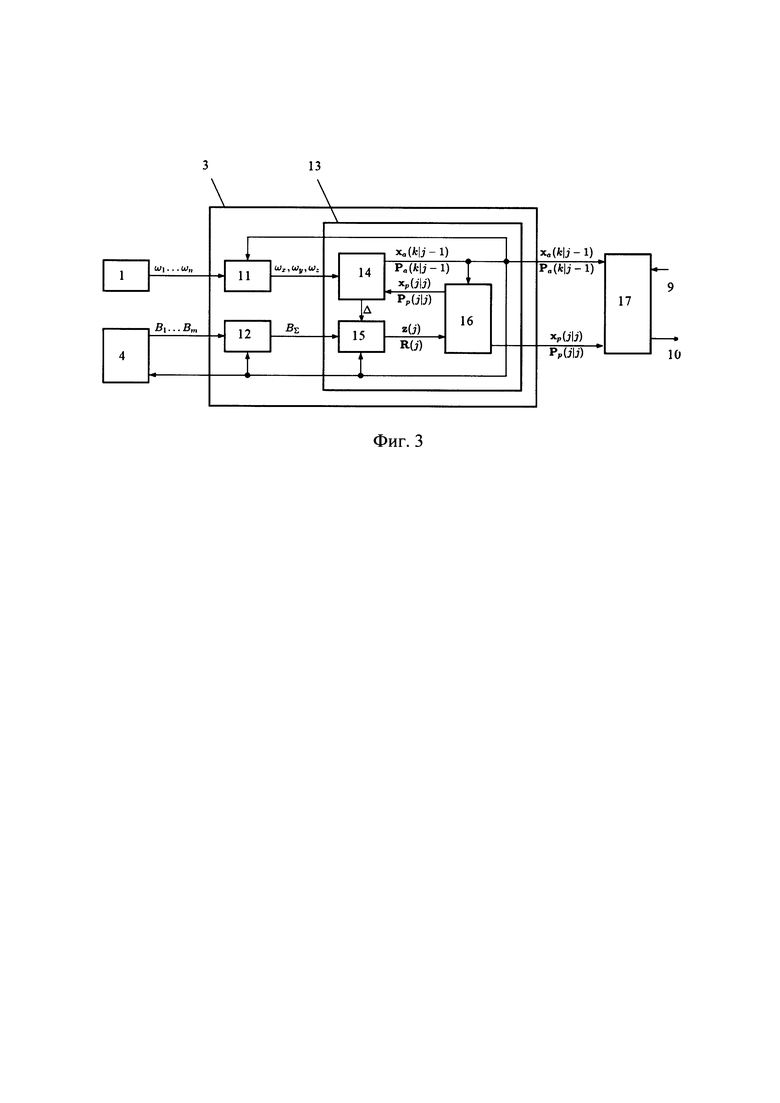
Структурная схема комплексирующего фильтра показана на фиг. 3.
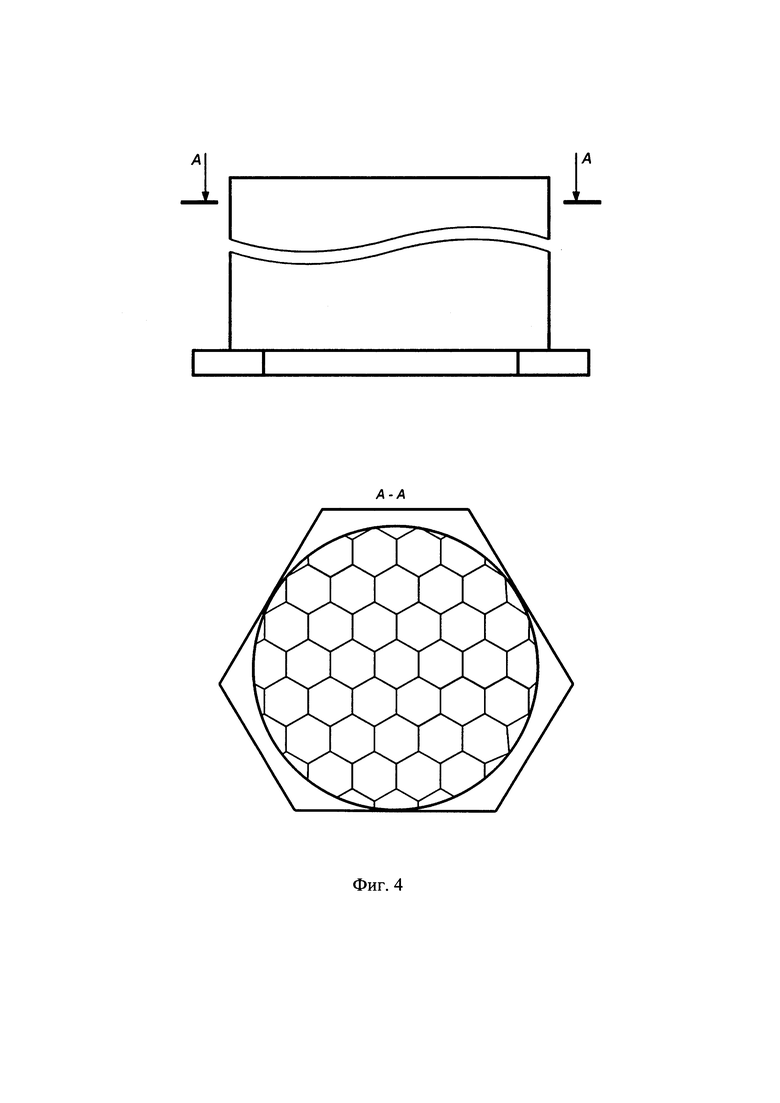
Пример узкопольной бленды - «сотовая бленда», показан на фиг. 4, где:
1 - блок датчиков угловых скоростей,
2 - датчик угловой скорости (ДУС),
3 - высокоскоростное специальное вычислительное устройство,
4 - блок оптических головок,
5 - оптическая головка,
6 - телевизионная камера (ТВК),
7 - защитная бленда,
8 - приборная система координат,
9 - дополнительная входная информация,
10 - выходная информация,
11 - блок датчика отказов ДУС,
12 - блок датчика отказов ТВК,
13 - комплексирующий фильтр,
14 - блок экстраполяции вектора состояния,
15 - блок обработки изображения,
16 - блок коррекции вектора состояния,
17 - блок подготовки выходных данных.
Реализация заявленного способа астроинерцильной навигации поясняется работой устройства изображенного на фиг. 1, 3. Параметры изменения ориентации носителя измеряются блоком 1 датчиков угловой скорости (ДУС). Блок 1 состоит из трех или более ДУС 2 с некомпланарными осями чувствительности (ДУС1-ДУСn, n≥3), причем только три датчика являются обязательными, а четвертый и далее -резервирующие. Блок 1 подключается к ВСВУ 3. Также к блоку 3 подключаются блок оптических головок 4, состоящий из одной или более оптических головок (ОГ) 5 с некомпланарными оптическими осями (ОГ1-ОГm, m≥1), причем только одна оптическая головка является обязательной, все остальные - резервирующие. Каждая оптическая головка состоит из телевизионной камеры 6 и защитной бленды 7. Каждая телевизионная камера включает в себя МФП и объектив. Взаимная ориентация осей чувствительности отдельных ДУС 2 и оптических осей отдельных ОГ 5 задается относительно приборной системы координат (ПСК) 8, жестко связанной с элементами конструкции астро-инерциального датчика ориентации.
Угловой размер ψБ углового поля зрения бленды 7 превосходит угловой размер ψК поля зрения камеры 6, ψБ>ψК. Компоненты ω1…ωn угловой скорости подвижного объекта, измеряемые блоком ДУС 1 и видеопотоки В1, …, Bm, формируемые блоком оптических головок 4 направляются в СВУ 3, которое выполняет обработку измерений и реализует комплексирующий фильтр объединяющий измерения инерциального и астрономического каналов для получения параметров ориентации носителя и СКО погрешностей этих параметров.
ВСВУ 3 передает в каждую оптическую головку 5 команды управления КУ1, …, КУm, камерами 6. Команда управления может содержать априорные растровые координаты звезд, находящихся в поле зрения соответствующей оптической головки и размеры зон интереса вокруг этих координат, в которых может находиться реальное изображение звезды. Априорные координаты и размеры зон интереса рассчитываются в ВСВУ 3 на основе измерений блока ДУС 1 и спецификации отдельных ДУС 2. Указанный способ управления телевизионными камерами 6 позволяет увеличить частоту кадров за счет сокращения объема информации, считываемой с МФП: из МФП считываются не полные кадры, а только несколько зон интереса - небольших прямоугольных участков растра вокруг предполагаемого изображения звезды.
Измерение ориентации в астрономическом канале выполняется по результатам цифровой обработки видеоинформации, получаемой от блока оптических головок 4. Сначала выполняется цифровая обработка изображений, получаемых от отдельных телевизионных камер 6 которая разделяется на внутрикадровую и межкадровую обработку. Внутрикадровая обработка выполняется внутри отдельных кадров или зон интереса с использованием двумерного цифрового фильтра с конечной импульсной характеристикой (КИХ-фильтра). Импульсная характеристика КИХ-фильтра согласована в каждом пикселе со смазанным изображением, которое получается в этом пикселе при наблюдении неподвижных звезд с борта вращающегося носителя. Форма импульсной характеристики согласованного фильтра зависит от растровых координат исходного пикселя, для которого она вычисляется. Импульсная характеристика H(p,q,r,s) согласованного фильтра неоднородная и описывается четырьмя индексами, где p,q - растровые координаты пикселя, в котором импульсная характеристика согласована со смазом, r, s - индексы отсчетов импульсной характеристики. Расчет коэффициентов импульсной характеристики выполняется для каждого нового кадра в соответствии с методиками, аналогичными [7, 8], с использованием измерений блока ДУС 2, накопленных за время экспонирования обрабатываемого кадра. При межкадровой обработке учитываются геометрические преобразования отдельных кадров, привязанных к последовательности моментов начала экспонирования, относительно некоторого выделенного момента времени внутри этой последовательности. Учет геометрических преобразований выполняется с использованием приращений ориентации носителя, вычисляемых по измерениям блока ДУС 2, которые сохраняются в оперативной памяти ВСВУ 3 синхронно с моментами начала экспонирования.
В результатах цифровой обработки последовательности изображений выполняются обнаружение изображений звезд и измерение их растровых координат. По измеренным растровым координатам вычисляются угловые координаты всех звезд, обнаруженных в изображениях, относительно ПСК 8. По полученному набору угловых координат звезд выполняется распознавание звездного образа и формируется вектор наблюдения, по которому в комплексирующем фильтре выполняется коррекция априорной оценки вектора состояния и получается апостериорная оценка вектора состояния.
Вектор состояния комплексирующего фильтра обязательно включает в себя параметры ориентации ПСК 8. Дополнительно, в вектор состояния может включаться набор параметров модели ошибок первичных измерительных каналов. Компоненты вектора состояния, в которых оцениваются ошибки первичных измерителей, используются при предварительной обработке их измерений. Параметры ориентации ПСК 8, получаемые в векторе состояния, преобразуются к ориентации ПСК 8 относительно заданной навигационной системы координат за счет использования дополнительной входной информации 9, получаемой от внешних источников. Выходная информация 10 астро-инерциального датчика содержит ориентацию ПСК 8 относительно навигационной системы координат. Дополнительно в выходной информационный пакет астро-инерциального датчика могут включаться среднеквадратичные отклонения (СКО) погрешностей этой ориентации.
Компоненты угловой скорости подвижного объекта ω1…ωn, измеряются блоком ДУС 1. Астрономические наблюдения выполняются блоком оптических головок 4. Компоненты ω1…ωn угловой скорости, измеренные блоком 1, передаются в ВСВУ 3, где попадают блок 11 датчика отказов ДУС. В блоке 11 выполняется обнаружение отказавших ДУС 2, исключение их из обработки и формирование признаков неисправности. Если отказов не обнаружено, или конфигурация отказов покрывается схемой резервирования, блок 11 вычисляет компоненты ωх, ωу, ωz вектора угловой скорости ПСК 8 и передает их на выход. Если обнаруженные отказы не покрываются схемой резервирования, блок 11 формирует признак отказа и передает на выход те компоненты ωх, ωу, ωz, которые могут быть вычислены при сложившейся конфигурации работоспособных ДУС 2.
Данные В1…Bm от блока оптических головок 4 передаются в ВСВУ 3, где попадают в блок 12 датчика отказов ТВК. Блок 12 выполняет обнаружение отказов каждой ТВК 5 в отдельности. Под отказом ТВК 5 понимается невозможность выполнить астрономические измерения по данным из этого канала. Такое определение отказа включает в себя не только физические кратковременные и постоянные аппаратные и программные отказы ТВК 5, но и засветку МФП мощным источником оптического излучения.
С выходов блоков 11 и 12 снимаются доступные компоненты угловой скорости ωх, ωу, ωz и данные B∑ работоспособных ТВК, соответственно. Эти данные передаются в комплексирующий фильтр 13, реализованный в программном обеспечении ВСВУ 3. Компоненты ωх, ωу, ωz поступают в блок 14 экстраполяции вектора состояния, в котором вычисляется априорная оценка вектора состояния ха(k|j-1), экстраполированная на момент дискретного времени k текущего измерения ДУС от момента дискретного времени j-1 предыдущей коррекции вектора состояния, выполненной по данным от блока 4. Также в 14 вычисляется ковариационная матрица экстраполированной оценки Pa(k|j-1) (априорная ковариационная матрица). Априорные значения xa(k|j-1) и Ра(k|j-1) передаются блок 16 коррекции вектора состояния и блок 17 подготовки выходных данных.
Видеопоток B∑ направляется в блок 15 обработки изображения. В этом блоке выполняется внутрикадровая и межкадровая обработка изображений. Параметры смаза и геометрических преобразований изображений рассчитываются с использований приращений ориентации А ПСК 8, получаемых от блока 14. В обработанном изображении выполняется обнаружение звезд, распознавание звездного образа и формирование вектора наблюдения z(j) и его ковариационной матрицы R(j).
Блок 16 коррекции вектора состояния, кроме априорной оценки вектора состояния xa(k|j-1) и его ковариационной матрицы Pa(k|j-1), получает вектор наблюдения z(j) и его ковариационную матрицу R(j). Измерения блока оптических головок 4 выполняются в дискретные моменты времени j, причем период следования этих измерений многократно превосходит период следования дискретных моментов времени k измерений ДУС 2. В момент получения очередного значения z(j) вектора наблюдения блок 16 корректирует текущее значение априорной оценки xa(j|j-1) вектора состояния и вычисляет апостериорную (скорректированную) оценку вектора состояния xp(j|j) и ковариационную матрицу Pp(j|j) этой оценки.
В блоке 17 из входных наборов данных извлекается наилучшая из доступных оценок ориентации ПСК 8 и элементы ковариационной матрицы, характеризующие точность параметров ориентации. Извлеченные параметры преобразуются к ориентации ПСК 8 относительно навигационной системы координат с использованием дополнительной информации 9, получаемой от внешних источников. Результаты преобразования передаются на выход астро-инерциального датчика в виде информационного пакета 10.
Цифровая обработка видеопотоков от блока оптических головок 4 с использованием измерений блока ДУС 1 улучшает отношение сигнал/шум в обработанных кадрах и позволяет обнаруживать относительно слабые звезды при вращении астро-инерциального датчика и при относительно слабой диффузной засветке астрономического канала. Поверхностная плотность распределения таких звезд на небесной сфере позволяет сузить угловое поле зрения астрономического канала до 8° и менее. Сужение поля зрения оптической головки до столь малых величин позволяет заменить защитную бленду классической конструкции на узкопольную бленду, имеющая меньшие размеры и массу.
Макетные испытания предлагаемого устройства показали что, указанный технический результат достигается за счет включения в единую конструкцию набора ДУС с тремя или более некомпланарными осями чувствительности, одной или более ТВК с некомпланарными оптическим осями, и СВУ, решающего вычислительную задачу обнаружения отказов в первичных датчиках и комплексирования результатов инерциальных и астрономических измерений.
Источники информации:
1. Патент RU №141801.
2. Бессонов Р.В., Дятлов С.А., Куркина А.Н. и др. Особенности построения и функционирования приборов астроориентации БОКЗ со встроенными датчиками угловой скорости // Современные проблемы определения ориентации и навигации космических аппаратов, Таруса, 22-25 сентября 2008 г. - С. 32-40.
3. Аванесов Г.А., Бессонов Р.В., Брысин Н.Н. и др. Астроинерциальная навигационная система // Механика, управление и информатика. - 2015 - Т. 7, №2(55), С. 21-37.
4. Бессонов Р.В., Белинская Е.В., Брысин Н.Н. и др. Звездные датчики ориентации в астроинерциальных летательных аппаратах // Современные проблемы дистанционного зондирования Земли из космоса. - 2018 - Т. 15, №6, С. 9-20.
5. Патент US №7216036.
6. Патент RU №141 801.
7. "Northrop star tracer aboard В-1B. Julian Moxom. Air Force Association Show. October 1983", а также из работы "NAS-21 astro/inertial navigation system (United States). Jane's Avionics, July, 1997".
8. Патент US №5396326 - прототип.
Дополнительная литература:
9. A.A. УНТИЛОВ, Д.А. ЕГОРОВ, А.В. РУПАСОВ, Р.Л. НОВИКОВ, С.Т. НЕФОРОСНЫЙ, М.П. АЗБЕЛЕВА, Е.В. ДРАНИЦЫНА РЕЗУЛЬТАТЫ ИСПЫТАНИЙ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА. Гироскопия и навигация. Том 25, №3 (98), 2017.
10. Василюк Н.Н. Электронная коррекция смаза изображения в сканирующей оптико-электронной системе // Электромагнитные волны и электронные системы. - 2009 - Т. 14, №12, С. 41-48.
11. Василюк Н.Н. Дифференциальное уравнение траектории смаза для сканирующей оптико-электронной системы // Электромагнитные волны и электронные системы. - 2009 - Т. 14, №12, С. 49-51.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686453C1 |
| Устройство определения ориентации объекта по звездам с расщепленным полем зрения | 2022 |
|
RU2796578C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ЗВЕЗДАМ И ДЛИТЕЛЬНОГО ПОДДЕРЖАНИЯ ПОВЫШЕННОЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ИХ РЕАЛИЗАЦИИ | 2014 |
|
RU2585179C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
Изобретение относится к области приборостроения, а именно к высокоточным комплексным навигационным системам с использованием астроизмерений, и применяется в составе бортового оборудования авиационно-космических объектов. Способ астроинерциальной ориентации основан на формировании электрических сигналов от инерциальных датчиков и электрического сигнала изображения от фотоприемника астровизора. Перед началом процедуры обнаружения и распознавания звездного образа видеопотоки от оптических головок сначала формируются за счет указания координат областей считывания фотоприемных матриц, вычисленных на основе априорных координат звезд, накрываемых полями зрения оптических головок, и измерений датчиков угловых скоростей. Затем подвергается цифровой обработке с использованием измерений инерциальных датчиков угловой скорости, в результате чего из оптических головок вычитываются не полные кадры, а несколько областей интереса меньшего размера. Технический результат – повышение точности выходных параметров астроинерциальной навигационной системы и повышение отказоустойчивости. 4 з.п. ф-лы, 4 ил.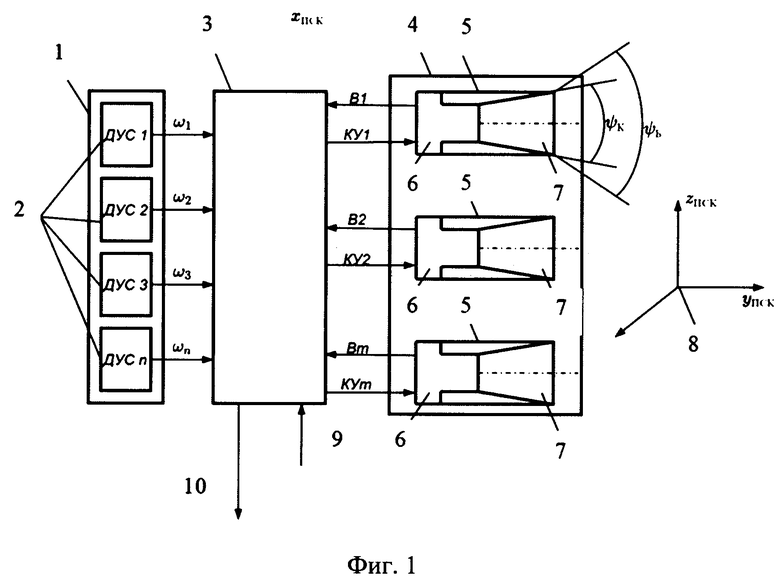
1. Способ астроинерциальной ориентации, основанный на формировании электрических сигналов от инерциальных датчиков и электрического сигнала изображения от фотоприемника астровизора, отличающийся тем, что перед началом процедуры обнаружения и распознавания звездного образа видеопотоки от оптических головок сначала формируются за счет указания координат областей считывания фотоприемных матриц, вычисленных на основе априорных координат звезд, накрываемых полями зрения оптических головок, и измерений датчиков угловых скоростей, а затем подвергаются цифровой обработке с использованием измерений инерциальных датчиков угловой скорости, в результате чего из оптических головок вычитываются не полные кадры, а несколько областей интереса меньшего размера.
2. Способ астроинерциальной ориентации по п. 1, отличающийся тем, что цифровая обработка видеопотоков от оптических головок, предваряющая процедуру обнаружения и распознавания звездного образа, выполняется с использованием двумерного цифрового фильтра с конечной импульсной характеристикой, согласованной со смазанными изображениями неподвижных звезд, получаемых за счет поворотов оптических головок во время экспонирования и синтезированной с учетом измерений инерциальных датчиков угловой скорости за время экспонирования.
3. Способ астроинерциальной ориентации по п. 1, отличающийся тем, что цифровая обработка видеопотоков от оптических головок, предваряющая процедуру обнаружения и распознавания звездного образа, выполняется с использованием геометрических преобразований отдельных изображений зон интереса, причем параметры преобразований рассчитываются с учетом измерений инерциальных датчиков угловой скорости, полученных синхронно с моментами начала экспонирования преобразуемых кадров.
4. Способ астроинерциальной ориентации по п. 1, отличающийся тем, что выходные параметры ориентации приборной системы координат датчика относительно навигационной системы координат рассчитываются из априорной оценки вектора состояния комплексирующего фильтра с использованием дополнительной входной информации, получаемой от внешних источников.
5. Способ астроинерциальной ориентации по п. 1, отличающийся тем, что выходные параметры ориентации приборной системы координат датчика относительно навигационной системы координат рассчитываются из апостериорной оценки вектора состояния комплексирующего фильтра с использованием дополнительной входной информации, получаемой от внешних источников.
| US 20150268051 A1, 24.09.2015 | |||
| US 20210033400 A1, 04.02.2021 | |||
| US 20190064364 A1, 28.02.2019 | |||
| US 20140340522 A1, 20.11.2014 | |||
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686453C1 |
| Приспособление для передвижения железнодорожных повозок | 1933 |
|
SU39190A1 |
| CN 101893440 B, 14.12.2011. | |||

