Изобретение относится к области навигации подвижных технических систем и может быть использовано в автономных системах навигации летательных аппаратов (ЛА), в которых требуется определение абсолютных координат с высокой точностью местоположения в условиях полной автономности.
Пилотажно-навигационная система ЛА имеет в своем составе инерциальную навигационную систему (ИНС), работающую непрерывно при измерении текущего ускорения (акселерометры), горизонтального и вертикального углов (гироскопы).
Инерциальная навигационная система имеет существенный недостаток - за время полета увеличивается величина погрешности в определении навигационных параметров.
В связи с этим, для коррекции информации о текущем местоположении летательного аппарата пилотажно-навигационная система может иметь в своем составе, помимо ИНС, спутниковую навигационную систему, радиолокационную систему, корреляционно-экстремальную навигационную систему и отдельные технические приборы в виде высотомера.
Анализ навигационных систем показал, что свойство автономности имеют только инерциальная и корреляционно-экстремальная навигационные системы. Одним из известных способов корреляционно-экстремальной навигации является астрономическая навигация, которая позволяет производить коррекцию навигационных параметров.
Известна астроинерциальная навигационная система (RU №141801, от 2013 г.) содержащая бесплатформенную навигационную систему, облаченную в корпус, положение строительных осей которой согласовано со строительными осями объекта навигации, и астровизирующее устройство, включающее два оптико-электронных канала, на входе которых установлены объективы со встроенными затворами и блендами, один из каналов предназначен для визирования звезд, а другой - для визирования Солнца, объективы жестко закреплены по оси с чувствительными элементами каждого канала и заключены в защитный корпус, при этом выходы чувствительных элементов соединены с вычислителем астровизирующего устройства, соединенным с навигационным вычислителем бесплатформенной навигационной системы, в астроинерциальную систему введена система настройки и сопряжения осей каналов астровизирующего устройства и строительных осей бесплатформенной навигационной системы, выполненная в виде источника излучения и фотоприемного устройства, установленных на корпусе бесплатформенной навигационной системы и призмы, установленной на защитном корпусе объектива астровизирующего устройства, выход фотоприемного устройства подключен к вычислителю БИНС, при этом на боковой поверхности защитного корпуса выполнены оптические окна, расположенные по оси источника излучения и фотоприемного устройства, объектив астровизирующего устройства выполнен широкопольным, а астровизирующее устройство жестко закреплено с корпусом бесплатформенной инерциальной системы на едином основании для установки непосредственно на объект навигации.
Недостатками указанного устройства являются ограниченная точность выходных параметров, обусловленная использованием в модуле процессора БИНС расчетных картографических данных, а не фактических значений гравитационной составляющей ускорения силы тяжести.
Известен способ повышение точности выходных параметров астроинерциальной навигационной системы (US №5396326 от 1995 г.) основанный на формировании электрических сигналов от трех гироскопов и трех акселерометров, установленных на общем базовом основании и ориентированных соответственно по осям X, Y, Z трехмерной системы координат и электрического сигнала изображения отклика фотоприемника астровизора, который ориентирован на оптическое излучение от рабочей звезды, а также на формировании соответствующих этой ориентации электрических сигналов от датчиков угла крена и тангажа и формировании сигнала навигационных ошибок параметров, а также тем, что дополнительно сформирован параллельный световой поток от вновь установленного искусственного источника светового излучения, который парциально разделен на три направления, причем первое направление обеспечивает оптическую связь непосредственно между искусственным источником светового излучения и объективом астровизора, второе направление обеспечивает оптическую связь между искусственным источником светового излучения, базовым основанием инерциальной навигационной системы и объективом астровизора, а третье направление обеспечивает оптическую связь между искусственным источником светового излучения, базовым основанием инерциальной навигационной системы, стенкой корпуса астронавигационной системы, на которой установлен искусственный источник светового излучения, и объективом астровизора, при этом последовательно изображения откликов для каждого светового луча устанавливают на минимальном расстоянии от центра координатной матрицы с собственной декартовой системой координат, совмещают центр координатной матрицы с изображением отклика от первого луча, а для второго и третьего луча экспериментально определяют и запоминают постоянные коэффициенты преобразования угловых перемещений К2 и К3, которые имеют размерность [угловая сек/мм], дополнительно вводят координатную матрицу и фиксируют координаты отклонения изображения откликов второго (Р2, θ2) и третьего (Р3) лучей от центра координатной матрицы, преобразовывают их в цифровой электрический сигнал и запоминают, переводят систему в режим эксплуатации, для чего выключают искусственный источник светового излучения, ориентируют астровизор на излучение от рабочей звезды и вычисляют навигационные ошибки: крена Δγ = θ2 ⋅ К2; тангажа Δυ = Р2 ⋅ К2; курса Δψ = Р3 ⋅ К3, где Δγ, Δυ, Δψ измеряют в [углов, мин], θ2, P1, Р2 - замеренные отклонения второго и третьего лучей на координатной матрице с размерностью [мм] К2 и К3 - коэффициенты преобразования угловых перемещений с размерностью [углов, мин/мм], а затем определяют истинные значения пилотажных параметров: курса ψи с т=ψ-Δψ; тангажа υи с т=υ-Δυ; крена γи с т=γ-Δγ, где - ψ, υ, γ - вычисленные пилотажные параметры объекта в инерциальной системе координат с размерностью [углов, мин], при этом периодически корректируют значения ранее определенных отклонений θ2, Р2, Р3, для чего в вычислителе формируют управляющий сигнал, который подают на блок управления поворотными механизмами и вновь устанавливают астровизор в положение настройки, включают искусственный источник светового излучения и повторяют процедуру вычисления значений координат отклонения для трех опорных лучей, причем отсчет отклонений ведут от истинного положения отклика изображения первого луча на координатной матрице для текущего момента времени, модифицируют соответствующий раздел блока памяти и используют их в следующем периоде эксплуатации. Наиболее близким техническим решением заявленного устройства, т.е. прототипом, является устройство для реализации способа, содержащее первый корпус, в котором установлены сориентированные по каждой из осей трехмерной координатной системы три гироскопа и три акселерометра, установленные на общем базовом основании, каждый из которых соответственно через первый и второй аналогово-цифровые преобразователи сигналов соединены с первым и вторым входом блока памяти, последовательно соединенного с вычислителем и блоком исполнительных механизмов, а также содержащее блок управления поворотными механизмами, первый выход которого соединен с первым блоком поворотных механизмов, первый выход которого подключен к внешней рамке первого поворотного механизма, соединенного с датчиком крена, выход которого через третий аналогово-цифровой преобразователь сигнала подключен к третьему входу блока памяти, а второй выход первого блока поворотных механизмов последовательно соединен с внутренней рамкой второго поворотного механизма, датчиком тангажа, четвертым аналогово-цифровым преобразователем сигнала и четвертым входом блока памяти, при этом третий выход блока поворотных механизмов подключен к астровизору, который содержит последовательно соединенные объектив астровизора, фотоприемник и пятый аналогово-цифровой преобразователь сигнала, выход которого подключен к пятому входу блока памяти.
Основными недостатками этого способа являются: повышенное энергопотребление, большая стоимость, ограниченная точность выходных параметров астроинерциальной навигационной системы и невозможность пространственной ориентации от одной рабочей звезды, отсутствие учета поправок, связанных со скоростной аберрацией и атмосферной рефракции.
Наиболее близким по технической сущности к заявленному изобретению является астронавигационная система (RU 2592715 от 2015 г), установленная на летательном аппарате и содержащая бесплатформенную инерциальную навигационную систему, включающую акселерометры, гироскопы, приемник спутниковой радионавигационной системы, навигационный вычислитель, соединенный с источником питания, астровизирующее устройство с вычислителем, определяющим угловые параметры визирования звезд и подключенным к навигационному вычислителю бесплатформенной инерциальной навигационной системы, при этом выходы приемника спутниковой радионавигационной системы и гироскопов соединены с входами навигационного вычислителя бесплатформенной инерциальной навигационной системы, в систему вводят блок градиентометров, жестко связанный с бесплатформенной инерциальной навигационной системой, для возможности синхронного перемещения с летательным аппаратом, причем выход блока градиентометров подключен к входу навигационного вычислителя бесплатформенной инерциальной навигационной системы, выполненной в виде последовательно соединенных программного модуля вычисления матрицы градиентов, программного модуля счисления скорости, программного модуля счисления координат и программного модуля коррекции.
Однако данной системе присущи существенные недостатки: высокие массо-габаритные требования ввиду наличия двух дополнительных навигационных систем; учет аберрации и рефракции атмосферы происходит только для вычисления параметров ориентации оптической оси астровизирующего устройства, но не наблюдаемых звезд.
Целью изобретения является создание способа коррекции ИНС автономного ЛА, с использованием астрономической системы, позволяющей проводить автономную коррекцию ИНС при наличии одного визирующего устройства и звездного каталога с базой данных эталонных изображений созвездий и экваториальных координат звезд.
Требуемый технический результат достигается тем, что производится коррекция инерциальной навигационной системы летательного аппарата с использованием астрономической системы, заключающаяся в автоматическом прогнозе и определении области коррекции, получении текущего изображения навигационных звезд, и формировании коррекционных координатных поправок, на этапе предпусковой подготовки определяется актуальный фрагмент массива базы данных навигационных звезд доступной видимости в зависимости от полушария и месяца проведения запуска летательного аппарата по всей траектории полета, в процессе полета летательного аппарата прогнозируется направление объектива астровизирующего устройства относительно навигационных звезд, в момент попадания в объектив прогнозируемой области космического пространства производится фотографирование, обработка изображения и наложение эталонного изображения созвездия из базы данных, определяются координаты звезд на снимке в пикселях и углы ориентации снимка, угол наклона снимка, азимут направления съемки и угол поворота снимка, а также экваториальные координаты летательного аппарата, все они являются входными данными для расчета местоположения звезд, устранения погрешностей связанных со скоростной аберрацией из-за движения Земли по орбите и атмосферной рефракцией производится расчет невязок для определении текущего местоположения летательного аппарата относительно реальных экваториальных координат базы данных.
Сущность изобретения поясняется функциональной схемой, где на Фиг. 1 изображены:
1 - инерциальная навигационная система;
2 - блок перехода к сферической системе координат;
3 - блок прогноза областей космического пространства;
4 - блок определения наличия навигационных звезд;
5 - звездный каталог с базой данных эталонных изображений;
6 - визирующее устройство;
7 - БЦВМ с программой определения навигационных параметров;
8 - блок перехода к связной системе координат;
9 - блок перехода к связной системе координат;
10 - блок выработки команд управления.
Изобретение работает следующим образом: инерциальная навигационная система 1 определяет текущие навигационные параметры летательного аппарата x, y, z. Вычисленные координаты подаются на вход блока перехода к сферической системе координат 2, сущность которого составляет матрица перехода  . Данные, о местоположении летательного аппарата в сферических координатах δ, α, r поступают на вход блока прогноза областей космического пространства 3, в котором определяется местоположение ЛА относительно звезд. По результатам работы блока прогноза областей космического пространства 3, блок определения наличия навигационных звезд 4 определяется наличие области космического пространства со звездами, пригодной для коррекции Si,j, где i - полушарие, j - месяц. Данное разделение областей космического пространства позволяет уже во время предстартовой подготовки не использовать весь массив данных, а ограничится необходимой его частью. При наличии навигационных звезд в текущей области космического пространства, информация поступает на вход в звездный каталог с базой данных эталонных изображений 5. При отсутствии навигационных звезд в текущей области космического пространства, коррекцию навигационных параметров произвести невозможно, и информация поступает на вход блока перехода к связной системе координат 9 матрицы перехода
. Данные, о местоположении летательного аппарата в сферических координатах δ, α, r поступают на вход блока прогноза областей космического пространства 3, в котором определяется местоположение ЛА относительно звезд. По результатам работы блока прогноза областей космического пространства 3, блок определения наличия навигационных звезд 4 определяется наличие области космического пространства со звездами, пригодной для коррекции Si,j, где i - полушарие, j - месяц. Данное разделение областей космического пространства позволяет уже во время предстартовой подготовки не использовать весь массив данных, а ограничится необходимой его частью. При наличии навигационных звезд в текущей области космического пространства, информация поступает на вход в звездный каталог с базой данных эталонных изображений 5. При отсутствии навигационных звезд в текущей области космического пространства, коррекцию навигационных параметров произвести невозможно, и информация поступает на вход блока перехода к связной системе координат 9 матрицы перехода  и впоследствии в блок выработки команд управления 10. При поступлении информации на выходе из звездного каталога с базой данных эталонных изображений 5, визирующее устройство 6 производит фотографирование области космического пространства с навигационными звездами, цифровая обработка полученного изображения и определение координат звезд в пикселях. Полученные координаты звезд в пикселях поступают в БЦВМ с программой определения навигационных параметров 7, где происходит их обработка.
и впоследствии в блок выработки команд управления 10. При поступлении информации на выходе из звездного каталога с базой данных эталонных изображений 5, визирующее устройство 6 производит фотографирование области космического пространства с навигационными звездами, цифровая обработка полученного изображения и определение координат звезд в пикселях. Полученные координаты звезд в пикселях поступают в БЦВМ с программой определения навигационных параметров 7, где происходит их обработка.
При фотографировании звезд с точки S, оптическая ось астровизира направлена вдоль оси мира Z. В этом случае плоскость снимка параллельна плоскости XY - с кругом склонения равноденственных точек.
Обозначив через f фокусное расстояние камеры, а через х0 и у0 - координаты изображения σ0 звезды на снимке, получим соотношение между экваториальными координатами звезды и координатами ее изображения на Фиг. 2, для чего применим следующие математические выражения:

где δ - угол склонения звезды, α - часовой угол звезды.
В общем случае звездный снимок занимает произвольное положение относительно системы координат XYZ, обозначив координаты изображения σ звезды, на полученном произвольном снимке через х и у, то увидим, что между координатами σ0 и σ прослеживается следующая связь:

где
Здесь х0, у0 - координаты главной точки снимка, которые определяются паспортом астровизирующего устройства. Направляющие косинусы ai, bi, ci, i = 1, 2, 3 определяются углом наклона снимка ε (угол тангажа), азимутом направления съемки t (угол рыскания)и углом поворота снимка χ (угол собственного вращения). Если обозначить экваториальные координаты главного луча через δ0 и α0 (координаты ИНС), то ε = 90° + δ0 и t = α0. Тогда, полагая χ = χ0, получим:

Выразим экваториальные координаты звезды через координаты x и y ее изображения на снимке. Для этого подставив (4) в (3) получим:

Вычисленные по формуле (5) экваториальные координаты звезды, не совпадают с координатами из астрономического ежегодника, то определение поправок к приближенным значениям элементов ориентирования запишем два уравнения:

где δ и α - координаты звезды, взятые из астрономического ежегодника, (tgδ), (tgα) - величины, вычисленные с использованием приближенных значений элементов ориентирования (5).
Частные производные определяются как:
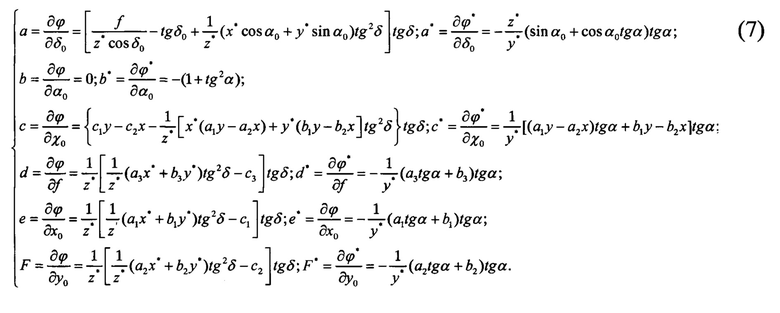
Для удобства отображения преобразуем (7) в следующий вид:

где  разница вычисленных величин угла склонения и взятых из астрономического ежегодника,
разница вычисленных величин угла склонения и взятых из астрономического ежегодника,  разница вычисленных величин угла склонения и взятых из астрономического ежегодника
разница вычисленных величин угла склонения и взятых из астрономического ежегодника
Таким образом, одна звезда дает два уравнения с шестью неизвестными. Так как на небесной сфере насчитывается 61 навигационная звезда на 12 созвездий то, при оптимальном подборе характеристик оптической системы пеленгатора, на одном снимке будем наблюдать 4-5 звезд. В этом случае при наличии четырех звезд на снимки получается система из восьми уравнений с шестью неизвестными.
Для решения системы уравнений (8) применим метод последовательных приближений или метод наименьших квадратов в матричной форме:

Где, А прямоугольная матрица размера m×n, m > n (то есть число строк матрицы А больше количества искомых переменных).
Учитывая, что такая система уравнений в общем случае не имеет решения, то необходим такой вектор х, чтобы минимизировать «расстояние» между векторами Ах и b. Для чего применим критерий минимизации суммы квадратов разностей левой и правой частей системы:

решение этой задачи минимизации приводит к решению системы уравнений:

Для поиска неизвестных элементов ориентации, применим метод последовательных приближений с условием:

что дает более точный результат поправок, чем метод наименьших квадратов.
В результате решения выражения (11), находится матрица-столбец

с искомыми элементами ориентации, в числе которых значения поправок к сферическим координатам летательного аппарата (ЛА) и углы его пространственной ориентации.
После коррекции навигационных параметров, информация подается на вход блока перехода к связной системе координат (8) для перехода к связным координатам x, y, z через  . Из блока перехода к связной системе координат (8) навигационные параметры идут на вход блока инерциальной навигационной системы (1) для замены данных о текущем местоположении в БЦВМ, и блока перехода к связной системе координат (8) с целью реализации программы управления ЛА.
. Из блока перехода к связной системе координат (8) навигационные параметры идут на вход блока инерциальной навигационной системы (1) для замены данных о текущем местоположении в БЦВМ, и блока перехода к связной системе координат (8) с целью реализации программы управления ЛА.
На Фиг. 3 представлен график накопления ошибок определения навигационных параметров в результате инерциальной навигационной системы совместно с предложенным способом астрономической коррекции навигационных параметров.
Таким образом, в предлагаемом способе дополнительно производится коррекция пространственной ориентации и автоматическая обработка изображения. Коррекция производится уже после первого снимка звездного неба с навигационными звездами. Достигается повышение точности позиционирования ЛА в автономном режиме, при использовании астровизирующего устройства, вследствие обнуления нарастающих ошибок ИНС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| СПОСОБ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442108C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| АСТРОВИЗИРУЮЩИЙ ПРИБОР | 2022 |
|
RU2793940C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686453C1 |



Изобретение относится к области навигации подвижных технических систем и может быть использовано в автономных системах навигации летательных аппаратов, в которых требуется определение с высокой точностью абсолютных координат местоположения в условиях полной автономности. Способ коррекции инерциальной навигационной системы летательного аппарата с использованием астрономической системы, заключающийся в автоматическом прогнозе и определении области коррекции, получении текущего изображения навигационных звезд и формировании коррекционных координатных поправок. При этом на этапе предпусковой подготовки определяется актуальный фрагмент массива базы данных навигационных звезд доступной видимости в зависимости от полушария и месяца проведения запуска летательного аппарата по всей траектории полета, в процессе полета летательного аппарата прогнозируется направление объектива астровизирующего устройства относительно навигационных звезд. В момент попадания в объектив прогнозируемой области космического пространства производится фотографирование, обработка изображения и наложение эталонного изображения созвездия из базы данных, определяются координаты звезд на снимке в пикселях и углы ориентации снимка, угол наклона снимка, азимут направления съемки и угол поворота снимка, а также экваториальные координаты летательного аппарата. Технический результат – повышение точности позиционирования летательного аппарата в автономном режиме, при использовании астровизирующего устройства, вследствие обнуления нарастающих ошибок инерциальной навигационной системы. 3 ил.
Способ коррекции инерциальной навигационной системы летательного аппарата с использованием астрономической системы, заключающийся в автоматическом прогнозе и определении области коррекции, получении текущего изображения навигационных звезд и формировании коррекционных координатных поправок, отличающийся тем, что на этапе предпусковой подготовки определяется актуальный фрагмент массива базы данных навигационных звезд доступной видимости в зависимости от полушария и месяца проведения запуска летательного аппарата по всей траектории полета, в процессе полета летательного аппарата прогнозируется направление объектива астровизирующего устройства относительно навигационных звезд, в момент попадания в объектив прогнозируемой области космического пространства производится фотографирование, обработка изображения и наложение эталонного изображения созвездия из базы данных, определяются координаты звезд на снимке в пикселях и углы ориентации снимка, угол наклона снимка, азимут направления съемки и угол поворота снимка, а также экваториальные координаты летательного аппарата.
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| Ленточная сушилка для кож и мехов | 1930 |
|
SU26970A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

