ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к измерительной техники и может быть использовано для поиска места прохождения и глубины трубопроводов водоснабжения и теплосети, газо- и нефтепроводов, находящихся под землей.
УРОВЕНЬ ТЕХНИКИ
Известен способ и устройство определения положения подземного трубопровода, раскрытый в WO 99/64886 A1, опубл. 16.12.1999. Известный способ включает следующие стадии: (а) передачу периодического акустического сигнала вдоль трубы; (б) прием акустического сигнала по крайней мере в трех местах, по крайней мере, два из этих мест расположены на противоположных сторонах трубы, с последующим определение относительной фазы акустического сигнала, принимаемого в каждом из принимающих мест; (с) вычисление положения подземного трубопровода на основе фазовых измерений. Устройство определения положения подземного трубопровода включает источник создания периодического акустического сигнала в трубе, акустические датчики и средство обработки акустических сигналов.
Недостатком известного способа является высокая погрешность при определении места положения трубопровода на основе уровня акустического сигнала, т.к. точность измерения зависит от способа установки акустического датчика на грунт, величины заглубления штырей датчика в грунт, наличия посторонних помех, а также сложно выделить слабые акустические сигналы из помех. Кроме того, поиск трубопровода по изменению фазы акустического сигнала за счет быстрого затухания сигнала в узкой полосе частот ограничивает данный метод по расстоянию и глубине залегания трубопровода. Также, акустический сигнал, при передаче по трубопроводу претерпевает сильные искажения, т.к. передается по многофазной среде, в результате происходят переотражения сигнала. Вследствие чего значения фазы сильно искажено. При малых сигналах данный способ будет иметь большие погрешности.
Кроме того, из уровня техники известен способ и устройство определения расположения трубопровода (прототип), раскрытый в RU 120785 U1, опубл. 27.09.2012. Способ определения расположения трубопровода включает возбуждение акустических колебаний в трубопроводе, расположение двух пьезоэлектрических датчиков на грунте в предполагаемом месте прохождения трубопровода, прием акустических сигналов датчиками, перенос датчиков на новое место наиболее вероятного прохождения трубопровода, повторный прием акустических сигналов, повторение операций перемещения датчиков и приема акустических сигналов необходимое количество раз, с последующим определением места расположения трубопровода на основе минимальной разности акустических сигналов с двух датчиков. Устройство определения расположения трубопровода содержит вычислитель разности вибросигналов и два чувствительных элемента, расположенных вдоль горизонтальной плоскости на расстоянии друг от друга. Устройство содержит две телескопические штанги, тележку, имеющую люльку, при этом чувствительные элементы выполнены в виде пьезоэлектрических датчиков, закрепленных на штырях, имеющих рукоять, и установлены на концах телескопических штанг с возможностью регулирования расстояния между ними, а сами телескопические штанги закреплены на тележке, причем на люльке размещен вычислитель разности вибросигналов, соединенный с пьезоэлектрическими датчиками, а на концах телескопических штанг закреплены фиксирующие кольца, в которых коаксиально установлены штыри с пьезоэлектрическими датчиками.
Недостатком раскрытого выше технического решения является высокая погрешность при определении места положения трубопровода на основе уровня акустического сигнала, т.к. точность измерения зависит от способа установки акустического датчика на грунт, величины заглубления штырей датчика в грунт, наличия посторонних помех. Кроме того, сложно выделить слабые акустические сигналы из помех.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленной группы изобретений является разработка способа и устройства определения места прохождения трубопровода.
Техническим результатом заявленной группы изобретения является повышение точности и снижение трудоемкости измерений.
Указанный технический результат достигается за счет того, что способ определения места прохождения трубопровода включает следующие этапы:
a) Установка по крайней мере одного акустического датчика на грунт в предполагаемом месте прохождения трубопровода;
b) Принудительное возбуждение акустических колебаний в трубопроводе на произвольном расстоянии по крайней мере от одного акустического датчика;
c) Прием акустического сигнала от источника акустического сигнала акустическим датчиком;
d) Обработка акустического сигнала с определением последовательности акустических сигналов;
e) Обработка последовательности акустических сигналов методами автокорреляции и определение амплитуды пиков автокорреляционной функции;
f) Определение максимального значения амплитуды пиков автокорреляционной функции из определенных значений амплитуды пиков автокорреляционной функции на этапе «е»;
g) Перестановка по крайней мере одного датчика на новое место наиболее вероятного прохождения трубопровода;
h) Повторение этапов «с»-«f» необходимое количество раз;
i) Определение места прохождения трубопровода по месту установки датчика, с которого получено максимальное значение амплитуды пика автокорреляционной функции.
При использовании более одного акустического датчика, установленных на известном расстоянии друг от друга, место прохождения трубопровода определяют по месту установки акустического датчика, с которого получено максимальное значение амплитуды пика автокорреляционной функции.
При использовании более одного акустических датчиков, установленных на известном расстоянии друг от друга, в случае снижения наибольшего максимального значения амплитуды пика автокорреляционной функции на одном из акустических датчиков, при перестановке акустических датчиков на новое место наиболее вероятного прохождения трубопровода, осуществляют корреляционную обработку принятых акустических сигналов с акустических датчиков, с последующим определением места нахождения пиков корреляционной функции, при этом место прохождения трубопровода определяют по рассчитанному отклонению от акустических датчиков на основе расчета корреляционной функции и места нахождения пика корреляционной функции.
Принудительное возбуждение акустических колебаний в трубопроводе осуществляется с помощью генератора, соединенного со средством создания акустических сигналов путем механического удара по поверхности трубопровода.
Принудительное возбуждение акустических колебаний в трубопроводе осуществляется с помощью генератора, соединенного со средством создания акустических сигналов путем создания акустического сигнала пьезоизлучателем и передачи сигнала через волновод на поверхность трубопровода.
Принудительное возбуждение акустических колебаний в трубопроводе осуществляется с помощью генератора, соединенного со средством создания акустических сигналов путем создания гидромеханических импульсов в жидкости, протекающей в трубопроводе.
Указанный технический результат достигается за счет того, что способ определения места прохождения трубопровода, включающий следующие этапы:
a) Установка по крайней мере двух акустических датчиков на грунт на известном расстоянии друг от друга, по разные стороны от оси предполагаемого места прохождения трубопровода;
b) Принудительное возбуждение акустических колебаний в трубопроводе на произвольном расстоянии по крайней мере от одного акустического датчика;
c) Прием акустического импульсного сигнала от источника акустического сигнала акустическими датчиками;
d) Корреляционная обработка акустического сигнала, с последующим определением места нахождения пиков корреляционной функции;
e) Определение места прохождения трубопровода по рассчитанному отклонению от акустических датчиков на основе расчета места нахождения пиков корреляционной функции.
Указанный технический результат достигается за счет того, что устройство определения места положения трубопровода для осуществления вышеуказанных способов содержит генератор, по крайней мере один приемный тракт, который содержит последовательно соединенные акустический датчик, усилитель, фильтр и аналого-цифровой преобразователь (АЦП), соединенные с блоком обработки, к которому подключен индикатор и блок памяти, при этом генератор соединен со средством создания акустических сигналов, установленном на трубопроводе, а по крайней мере один акустический датчик расположен на грунте над трубопроводом в предполагаемом месте его прохождения, и акустически связан при помощи трубопровода со средством создания акустических сигналов.
В качестве средства создания акустических сигналов применено механическое ударное устройство, приводимое в действие с помощью соленоида.
В качестве средства создания акустических сигналов применен пьезоэлектрический излучатель, акустически связанный с трубопроводом.
В качестве средства создания акустических сигналов применен излучатель гидромеханических импульсов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
Фиг. 1 – Блок-схема устройства.
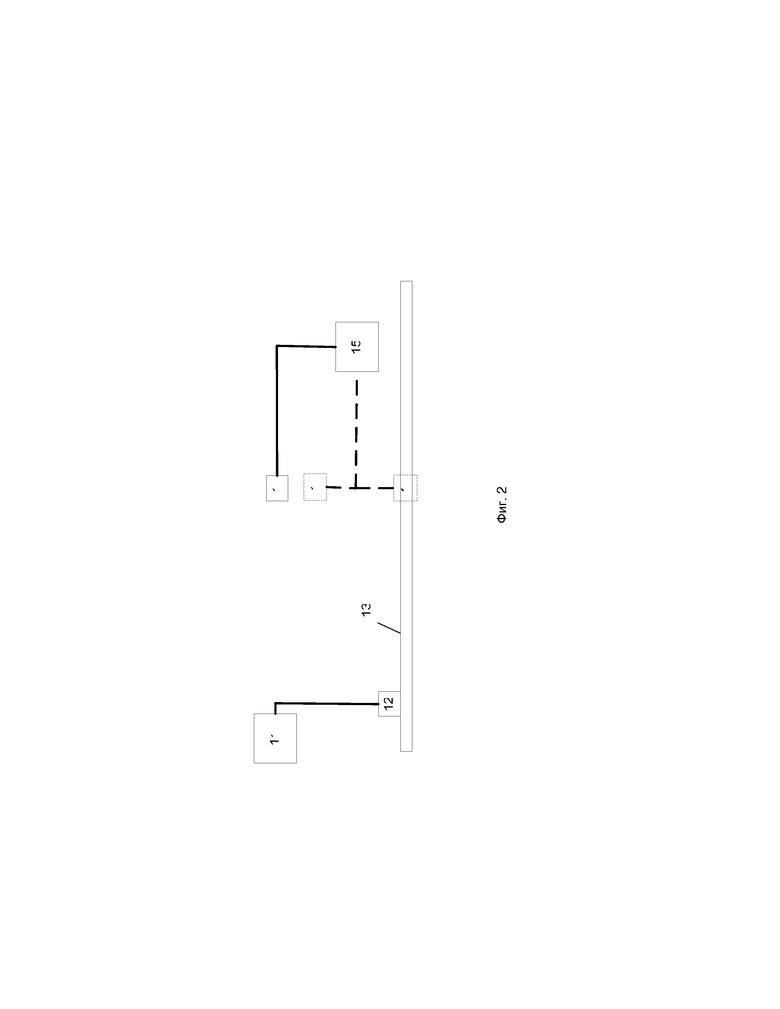
Фиг. 2 – Расположение на трубопроводе элементов устройства при наличии одного датчика и определения места прохождения трубопровода автокорреляционным способом.
Фиг. 3 – Расположение на трубопроводе элементов устройства при наличии двух датчиков и определения места прохождения трубопровода корреляционным способом.
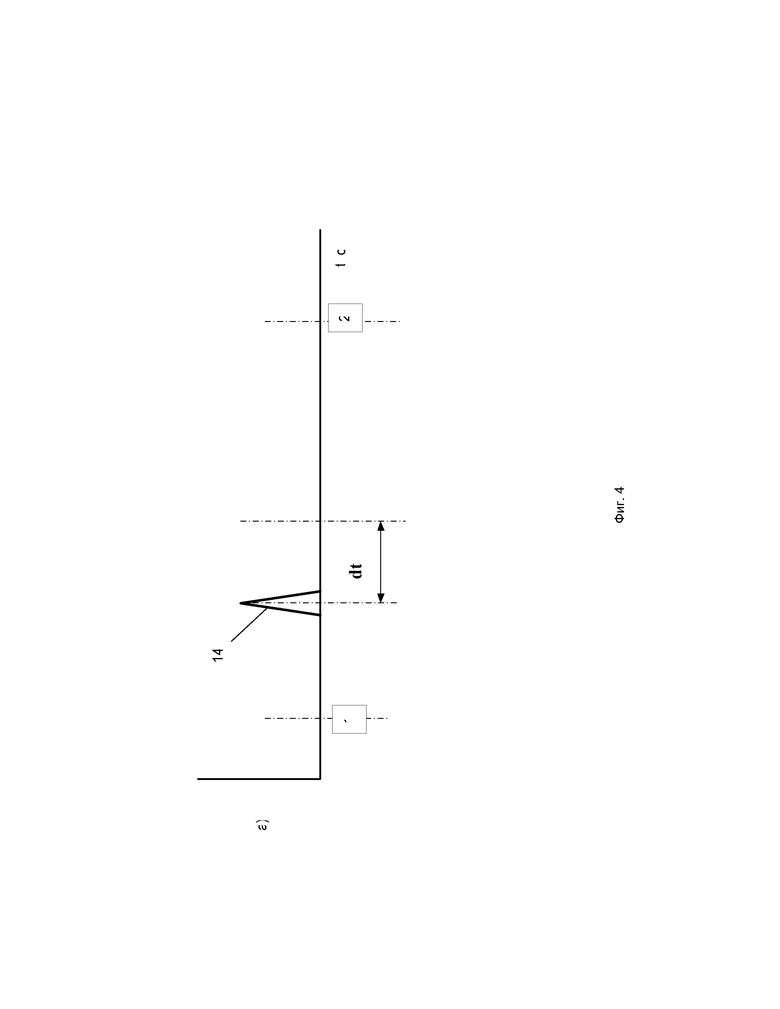
Фиг. 4 – Корреляционная функция.
1 – первый акустический датчик; 2 – второй акустический датчик; 3 – третий акустический датчик; 4 – четвертый акустический датчик; 5 – усилитель; 6 – фильтр; 7 – АЦП; 8 – блок обработки; 9 – индикатор; 10 – блок памяти; 11 – генератор; 12 – средство создания акустического сигнала; 13 – трубопровод; 14 – пик корреляционной функции, соответствующий месту прохождения трубопровода; 15 – коррелятор.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Устройство определения места положения трубопровода (13) для осуществления вышеуказанных способов содержит генератор (11), по крайней мере один приемный тракт, который содержит последовательно соединенные акустический датчик (1-4), усилитель (5), фильтр (6) и АЦП (7), соединенные с блоком обработки (8), к которому подключен индикатор (9) и блок памяти (10), блоки 5-10 объединены в коррелятор (15), при этом генератор соединен со средством (12) создания акустических сигналов, установленном на трубопроводе (13), а по крайней мере один акустический датчик (1-4) расположен на грунте над трубопроводом (13) в предполагаемом месте его прохождения, и акустически связан при помощи трубопровода (13) со средством (12) создания акустических сигналов.
Для осуществления заявленных способов в устройстве предусмотрено наличие от одного до четырех акустических датчиков.
В качестве средства создания акустических сигналов применено механическое ударное устройство, приводимое в действие с помощью соленоида.
В качестве средства создания акустических сигналов применен пьезоэлектрический излучатель, акустически связанный с трубопроводом.
В качестве средства создания акустических сигналов применен излучатель гидромеханических импульсов.
Устройство для осуществления одного варианта способа на основе автокорреляционной функции с одним акустическим датчиком осуществляют следующим образом.
В соответствии с фиг. 1-2 устанавливают на грунт акустический датчик (1) в предполагаемом месте прохождения трубопровода и осуществляют принудительное возбуждение акустических колебаний в трубопроводе на произвольном расстоянии от акустического датчика (1), для этого генератор (11) акустических сигналов подключают к средству (12) создания акустического сигнала. После чего генератор (11) акустических сигналов вырабатывает периодический или импульсный сигнал напряжения или тока, который приводит в действие средство (12) создания акустического сигнала, акустически связанное с трубопроводом. Средство (12) создания акустического сигнала акустически создает в трубопроводе акустический сигнал, который, распространяясь по трубопроводу фиксируется акустическим датчиком (1), усиливается в усилителе (5), фильтруется фильтром (6), оцифровывается АЦП (7), и поступает на блок обработки (8), в котором принятые акустические сигналы обрабатывают и определяют последовательности (зависимость амплитуды акустических сигналов от времени) акустических сигналов, которые сохраняются в блоке памяти (10). Затем сохраненные последовательности акустических сигналов обрабатывают в блоке обработки (8) методами автокорреляции и определяют амплитуды пиков (амплитуды акустических сигналов от времени) автокорреляционной функции и из определенных амплитуд пиков автокорреляционной функции определяют максимального значение амплитуд пика автокорреляционной функции и записывают в блоке памяти (10). При использовании одночастотных гармонических сигналов, восстанавливают значение амплитуды сигнала, по величине, и сравнивают величины восстановленных амплитуд сигналов. Определяют максимальное значение восстановленных амплитуд сигналов и записывают в блоке памяти (10).
Для определения максимальной амплитуды пиков автокорреляционной функции выполняют следующие действия. Производится спектральный анализ исходных данных, для этого выполняется преобразование Фурье, рассчитываются амплитуды, и строятся гистограммы зависимости амплитуды сигнала от частоты. Определяется наличие узкополосных помех и несовпадений спектров. Корректируются фильтры.
На основе скорректированных данных производится расчет автокорреляционной функции и определяется максимальная амплитуда.
Производится расчет автокорреляционной функции для цифровых последовательностей сигналов с акустического датчика.
Расчет производится по формулам приведенным ниже.
 ;
;
где  ,
,  – отсчеты цифровых последовательностей сигналов с акустического датчика;
– отсчеты цифровых последовательностей сигналов с акустического датчика;
 – среднеарифметическое значение отсчетов цифровых последовательностей сигналов с акустического датчика;
– среднеарифметическое значение отсчетов цифровых последовательностей сигналов с акустического датчика;
 – количество отсчетов цифровых последовательностей сигналов, показывающее разницу в отсчетах распространения сигнала от места расположения трубопровода до места установки акустического датчика;
– количество отсчетов цифровых последовательностей сигналов, показывающее разницу в отсчетах распространения сигнала от места расположения трубопровода до места установки акустического датчика;
Nmax – количество отсчетов цифровых последовательностей сигналов, диапазон для расчета автокорреляционной функции 0 ≤ ≤ (Nmax-1);
 – автокорреляционная функция;
– автокорреляционная функция;
После чего акустический датчик (1) устанавливают на грунт в новом месте наиболее вероятного прохождения трубопровода (13) и повторяют последовательность операций от фиксации акустическим датчиком (1) акустических сигналов до определения максимального значение амплитуд пика автокорреляционной функции и максимального значения восстановленных амплитуд сигналов. При этом на новое место наиболее вероятного прохождения трубопровода (13) акустический датчик (1) перемещают в направлении увеличения амплитуды пика автокорреляционной функции. Причем если в последующем месте расположения акустического датчика (1) амплитуда автокорреляционной функции увеличилась по сравнению с предыдущим, это означает приближение к месту истинного расположения трубопровода (13), если амплитуды автокорреляционной функции снизилась – необходимо акустический датчик (1) перемещать в противоположном направлении, на расстояние, меньше расстояния между местом установки датчика с этой стороны в предыдущий раз, если амплитуды автокорреляционной функции не изменилась – необходимо акустический датчик (1) перемещать на расстояние, меньше расстояния между местом установки датчика и предыдущем местом установки датчика, если амплитуды автокорреляционной функции и в этом случае не изменилась, необходимо акустический датчик (1) перемещать в направлении, перпендикулярном линии между предыдущим и последним местами расположения датчика (1).
Операции по перемещению датчика (1) и последовательность операций от фиксации акустическим датчиком (1) акустических сигналов до определения максимального значение амплитуды пика автокорреляционной функции повторяют необходимое количество раз, после чего определяют место прохождения трубопровода по месту установки датчика, с которого получен максимальное значение амплитуды пика автокорреляционной функции.
При использовании более одного акустического датчика (1-4) способ определения места расположения трубопровода (13) аналогичен описанному выше. При этом, например, при использовании двух акустических датчиков (1, 2) для определения места расположения трубопровода (13), акустические датчики (1, 2) установлены на грунте и перемещаются в новое место наиболее вероятного прохождения трубопровода при известном расстоянии расположения друг от друга, максимальное значение амплитуды пика автокорреляционной функции определяют на основе принятого акустического сигнала на каждом акустическом датчике (1, 2), а место прохождения трубопровода определяют по месту установки акустического датчика (1, 2), с которого получен максимальное значение амплитуды пика автокорреляционной функции. Для четырех акустических датчиков (1-4) максимальное значение амплитуды пика автокорреляционной функции определяют на основе принятого акустического сигнала на каждом акустическом датчике (1-4).
Кроме того, в соответствии с фиг. 3 в случае снижения амплитуды автокорреляционной функции на одном из акустических датчиков (1, 2) при их перемещении в новое место наиболее вероятного прохождения трубопровода (13), для того, чтобы не перемещать акустические датчики (1, 2) в новое место наиболее вероятного прохождения трубопровода (13) в сторону увеличения амплитуда автокорреляционной функции, осуществляют расчет корреляционной функции. Снижение амплитуда автокорреляционной функции говорит о том, что один из акустических датчиков (1, 2) с которого получено снижение амплитуды автокорреляционной функции, пересек ось трубопровода (13).
Для расчета корреляционной функции при наличии двух акустических датчиков применяют следующую последовательность. После перемещения двух акустических датчиков (1, 2), при котором происходит снижение амплитуды автокорреляционной функции на одном из акустических датчиков (1, 2), принятые акустические сигналы с акустических датчиков (1, 2) усиливаются в усилителе (5), фильтруется фильтром (6), оцифровываются АЦП (7) и поступают на блок обработки (8). Предварительно, в блок обработки (8) вносятся данные о скорости звука в грунте. Дополнительно, вносится информация о расстоянии между датчиками (h1). Параметр «расстояние между датчиками (h1)» непосредственно используется в расчетах и при визуализации результатов.
В блоке обработки (8) производится измерение принятых и оцифрованных сигналов с датчиков. Причем количество измерений выбирается автоматически, в зависимости от расстояния между датчиками. Производится спектральный анализ исходных данных, для этого выполняется преобразование Фурье, рассчитываются амплитуды, и строятся гистограммы зависимости амплитуды сигнала от частоты. Определяется наличие узкополосных помех и несовпадений спектров парных датчиков. Корректируются фильтры.
На основе скорректированных данных производится расчет корреляционной функции и привязка ее к обследуемому участку трубопровода. Привязка производится следующим образом:
• Рассчитывается максимально возможное время запаздывания сигнала на одном датчике относительно сигнала на другом. Оно равно времени прохождения звуковой волной расстояния, равного расстоянию между датчиками (расстояние между датчиками, деленное на скорость звука).
• Рассчитывается количество измерений «2*Nmax», которое делается за это время (рассчитанное время прохождения, умноженное на частоту дискретизации (q)).
• Сигнал шума генератора, пришедший к двум акустическим датчикам одновременно соответствует нахождению трубопровода в центре участка.
• Таким образом, весь участок разбивается на два отрезка. Отрезок от центра участка до первого (1) акустического датчика соответствует точкам корреляционной функции, рассчитанным при запаздывании сигнала на первом (1) акустическом датчике, изменяющемся от 0 до Nmax. Отрезок от центра участка до второго (2) акустического датчика соответствует корреляционной функции с запаздыванием сигнала на втором (2) акустическом датчике, изменяющемся от 0 до Nmax.
• Полученное разрешение (А) (расстояние на местности, между соседними точками корреляционной функции) вычисляется по формуле А=v/2*q (корреляционная функция на всей длине участка имеет в 2 раза больше точек чем Nmax).
Производится расчет корреляционной функции для цифровых последовательностей сигналов с первого (1) и второго (2) акустических датчиков.
Расчет производится по формулам приведенным ниже.
 ;
;
 ,
,
где , – отсчеты цифровых последовательностей сигналов с первого акустического датчика, соответственно;
 ,
,  – отсчеты цифровых последовательностей сигналов со второго акустического датчика, соответственно;
– отсчеты цифровых последовательностей сигналов со второго акустического датчика, соответственно;
,  – среднеарифметическое значение отсчетов цифровых последовательностей сигналов с первого акустического датчика или со второго акустического датчика, соответственно;
– среднеарифметическое значение отсчетов цифровых последовательностей сигналов с первого акустического датчика или со второго акустического датчика, соответственно;
– количество отсчетов цифровых последовательностей сигналов, показывающее разницу в отсчетах распространения сигнала от места расположения трубопровода до места установки акустических датчиков;
Nmax – количество отсчетов цифровых последовательностей сигналов, диапазон для расчета корреляционной функции 0 ≤ ≤ (Nmax-1);
 – нормализованная (диапазон принимаемых значений от -1 до +1) корреляционная функция на отрезке между двумя акустическими датчиками от центра обследуемого участка до первого (1) акустического датчика;
– нормализованная (диапазон принимаемых значений от -1 до +1) корреляционная функция на отрезке между двумя акустическими датчиками от центра обследуемого участка до первого (1) акустического датчика;
 – нормализованная корреляционная функция на отрезке между двумя акустическими датчиками от центра обследуемого участка до второго (2) акустического датчика.
– нормализованная корреляционная функция на отрезке между двумя акустическими датчиками от центра обследуемого участка до второго (2) акустического датчика.
Корреляционная функция отображается в виде графика на фиг. 4. Левый край графика соответствует положению первого (1) датчика, правый край – положению второго (2), центр графика соответствует центру обследуемого участка.
В результате обработки определяется место положение пика (14) корреляционной функции, соответствующий месту прохождения трубопровода (13), в блоке обработки (8) рассчитывается расстояние до трубопровода (13) и выводится на индикатор (9) устройства. Расстояние до места нахождения трубопровода рассчитывается на основе определенного времени задержки сигнала до пика корреляционной функции (dt=τ15/q, где τ15 – количество отсчетов цифровых последовательностей сигналов соответствующие пику корреляционной функции), наиболее вероятно соответствующего месту нахождения трубопровода, и рассчитанной скорости звука в грунте (скорость, умноженная на время задержки дает расстояние от центра между акустическими датчиками до места нахождения трубопровода). Вычитая из половины расстояния между первым (1) и вторым (2) акустическими датчиками определенное расстояние от центра между акустическими датчиками до места нахождения трубопровода, получаем расстояние от датчика до места нахождения трубопровода.
При использовании более двух акустических датчиков (1-4) способ определения места расположения трубопровода (13) при использовании корреляционной функции аналогичен описанному выше, при попарном использовании датчиков и известных расстояниях между ними. Например, при использовании четырех акустических датчиков (1-4) вначале переставляют датчики и для каждого рассчитывается автокорреляционная функция, определяются максимумы амплитуды пиков, сравниваются между собой, и при снижении сигнала на одном из датчиков, между ним, и датчиком с максимальным уровнем сигнала выполняется расчет корреляционной функции. В случае отсутствия корреляционного пика, выполняется расчет между датчиком с максимальным уровнем сигнала и предшествующим ему датчиком с меньшим уровнем сигнала. Расстояние до трубопровода находится так же как описано выше.
Устройство для осуществления еще одного варианта способа на основе только корреляционной функции, по крайней мере, с двумя акустическим датчиками осуществляют следующим образом.
Для расчета корреляционной функции при наличии двух акустических датчиков применяют следующую последовательность. В соответствии с фиг. 3, устанавливают в грунте по обе стороны от оси трубопровода (13) два акустических датчика (1, 2), при известном расстоянии друг от друга (h1) и осуществляют принудительное возбуждение акустических колебаний в трубопроводе на произвольном расстоянии, по крайней мере, от одного акустического датчика (1, 2), для этого генератор (11) акустических сигналов подключают к средству (12) создания акустического сигнала. После чего генератор (11) акустических сигналов вырабатывает периодический или импульсный сигнал напряжения или тока, который приводит в действие средство (12) создания акустического сигнала, акустически связанное с трубопроводом. Акустические датчики (1, 2) принимают акустические сигналы, возникающие в результате работы генератора, принятые акустические сигналы с акустических датчиков (1, 2) усиливаются в усилителе (5), фильтруется фильтром (6), оцифровываются АЦП (7) и поступают на блок обработки (8). Предварительно, в блок обработки (8) вносятся данные о скорости звука в грунте. Дополнительно, вносится информация о расстоянии между датчиками (h1). Параметр «расстояние между датчиками (h1)» непосредственно используется в расчетах и при визуализации результатов.
В блоке обработки (8) производится измерение принятых и оцифрованных сигналов с датчиков. Причем количество измерений выбирается автоматически, в зависимости от расстояния между датчиками. Производится спектральный анализ исходных данных, для этого выполняется преобразование Фурье, рассчитываются амплитуды, и строятся гистограммы зависимости амплитуды сигнала от частоты. Определяется наличие узкополосных помех и несовпадений спектров парных датчиков. Корректируются фильтры. На основе скорректированных данных производится расчет корреляционной функции и привязка ее к обследуемому участку трубопровода. Привязка производится следующим образом:
• Рассчитывается максимально возможное время запаздывания сигнала на одном датчике относительно сигнала на другом. Оно равно времени прохождения звуковой волной расстояния, равного расстоянию между датчиками (расстояние между датчиками, деленное на скорость звука).
• Рассчитывается количество измерений «2*Nmax», которое делается за это время (рассчитанное время прохождения, умноженное на частоту дискретизации (q)).
• Сигнал шума генератора, пришедший к двум акустическим датчикам одновременно соответствует нахождению трубопровода в центре участка.
• Таким образом, весь участок разбивается на два отрезка. Отрезок от центра участка до первого (1) акустического датчика соответствует точкам корреляционной функции, рассчитанным при запаздывании сигнала на первом (1) акустическом датчике, изменяющемся от 0 до Nmax. Отрезок от центра участка до второго (2) акустического датчика соответствует корреляционной функции с запаздыванием сигнала на втором (2) акустическом датчике, изменяющемся от 0 до Nmax.
• Полученное разрешение (А) (расстояние на местности, между соседними точками корреляционной функции) вычисляется по формуле А=v/2*q (корреляционная функция на всей длине участка имеет в 2 раза больше точек чем Nmax).
Производится расчет корреляционной функции для цифровых последовательностей сигналов с первого (1) и второго (2) акустических датчиков.
Расчет производится по формулам приведенным ниже.
;
,
где , – отсчеты цифровых последовательностей сигналов с первого акустического датчика, соответственно;
, – отсчеты цифровых последовательностей сигналов со второго акустического датчика, соответственно;
, – среднеарифметическое значение отсчетов цифровых последовательностей сигналов с первого акустического датчика или со второго акустического датчика, соответственно;
– количество отсчетов цифровых последовательностей сигналов, показывающее разницу в отсчетах распространения сигнала от места расположения трубопровода до места установки акустических датчиков
Nmax – количество отсчетов цифровых последовательностей сигналов, диапазон для расчета корреляционной функции 0 ≤ ≤ (Nmax-1);
– нормализованная (диапазон принимаемых значений от -1 до +1) корреляционная функция на отрезке между двумя акустическими датчиками от центра обследуемого участка до первого (1) акустического датчика.
– нормализованная корреляционная функция на отрезке между двумя акустическими датчиками от центра обследуемого участка до второго (2) акустического датчика.
Корреляционная функция отображается в виде графика на фиг. 4. Левый край графика соответствует положению первого (1) датчика, правый край – положению второго (2), центр графика соответствует центру обследуемого участка.
В результате обработки определяется место положение пика (14) корреляционной функции, соответствующий месту прохождения трубопровода (13), в блоке обработки (8) рассчитывается расстояние до трубопровода (13) и выводится на индикатор (9) устройства. Расстояние до места нахождения трубопровода рассчитывается на основе определенного времени задержки сигнала до пика корреляционной функции (dt=τ15/q, где τ15 – количество отсчетов цифровых последовательностей сигналов соответствующие пику корреляционной функции), наиболее вероятно соответствующего месту нахождения трубопровода, и рассчитанной скорости звука в грунте (скорость, умноженная на время задержки дает расстояние от центра между акустическими датчиками до места нахождения трубопровода). Вычитая из половины расстояния между первым (1) и вторым (2) акустическими датчиками определенное расстояние от центра между акустическими датчиками до места нахождения трубопровода, получаем расстояние от датчика до места нахождения трубопровода.
При использовании более двух акустических датчиков (1-4) способ определения места расположения трубопровода (13) при использовании корреляционной функции аналогичен описанному выше, при попарном использовании датчиков и известных расстояниях между ними. Например, при использовании четырех акустических датчиков (1-4) вначале устанавливают датчики и для каждого рассчитывается автокорреляционная функция, определяются максимумы амплитуды пиков, сравниваются между собой, и при снижении сигнала на одном из датчиков, между ним, и датчиком с максимальным уровнем сигнала выполняется расчет корреляционной функции. В случае отсутствия корреляционного пика, выполняется расчет между датчиком с максимальным уровнем сигнала и предшествующим ему датчиком с меньшим уровнем сигнала. Расстояние до трубопровода находится так же, как описано выше.
Определения места прохождения трубопровода при использовании методов автокорреляции позволяет повысить точность и снизить трудоемкости измерений, за счет возможности измерения акустического сигнала условиях сильного зашумления (уровень шума сравним или даже превышает уровень полезного сигнала), в таких условиях прямые акустические измерения уровня сигнала невозможно осуществить простыми акустическими датчиками.
Определения места прохождения трубопровода при использовании методов корреляции позволяет повысить точность и снизить трудоемкости измерений, за счет того измерения не зависит от заглубления акустических датчиков в грунт и уровня сигнала (позволяет выделить слабые акустические сигналы из помех).
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ И ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТА ТЕЧИ В ПРОДУКТОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2628672C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ТЕЧИ В ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2620023C1 |
| Пассивный способ обнаружения транспортного средства по его собственному акустическому шуму | 2016 |
|
RU2626284C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕКУЧЕЙ СРЕДЫ В ТРУБОПРОВОДЕ | 2021 |
|
RU2768295C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ УЛЬТРАЗВУКА В УГЛЕРОДНЫХ ЖГУТАХ И НИТЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2281464C2 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ МЕТОДОМ АКУСТИЧЕСКОЙ ТОМОГРАФИИ | 2017 |
|
RU2681424C1 |
| АКУСТИЧЕСКИЙ СКВАЖИННЫЙ ИЗЛУЧАТЕЛЬ | 2020 |
|
RU2744717C1 |
| СПОСОБ АНАЛИЗА БАЛЛИСТОКАРДИОГРАФИЧЕСКОГО СИГНАЛА ДЛЯ ДЕТЕКТИРОВАНИЯ ЕДИНИЧНЫХ СЕРДЕЧНЫХ УДАРОВ В РЕАЛЬНОМ ВРЕМЕНИ | 2020 |
|
RU2756157C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПЕРФОРИРОВАНИЯ ПРИ ВТОРИЧНОМ ВСКРЫТИИ НЕФТЕГАЗОВЫХ БУРОВЫХ СКВАЖИН | 2016 |
|
RU2613704C1 |


Изобретение относится к измерительной техники и может быть использовано для поиска места прохождения и глубины трубопроводов водоснабжения и теплосети, газо- и нефтепроводов, находящихся под землей. Предложен способ определения места прохождения трубопровода, включающий установку по крайней мере одного акустического датчика на грунт в предполагаемом месте прохождения трубопровода, принудительное возбуждение акустических колебаний в трубопроводе на произвольном расстоянии по крайней мере от одного акустического датчика, прием акустического импульсного сигнала от источника акустического сигнала акустическим датчиком, обработку акустического сигнала с определением последовательности акустических сигналов. Обработка последовательности акустических сигналов осуществляется методами автокорреляции с определением пиков автокорреляционной функции, определением максимального значения пика автокорреляционной функции из определенных значений пиков автокорреляционной функции. Далее осуществляют перестановку по крайней мере одного датчика на новое место наиболее вероятного прохождения трубопровода и повторяют этапы от приема акустических сигналов до переустановки акустических датчиков на новое место наиболее вероятного прохождения трубопровода необходимое количество раз. Определяют место прохождения трубопровода по месту установки датчика, с которого получено максимальное значение пика автокорреляционной функции. Технический результат - повышение точности и снижение трудоемкости измерений. 3 н. и 8 з.п. ф-лы, 4 ил.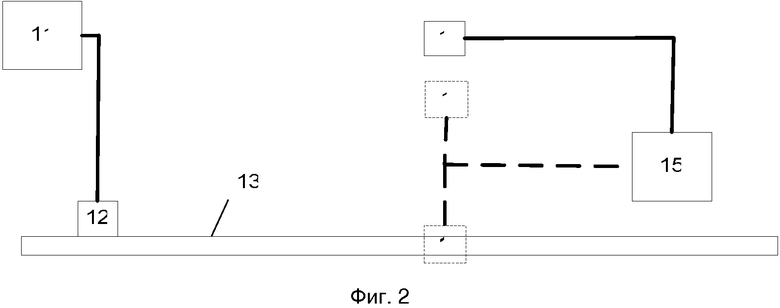
1. Способ определения места прохождения трубопровода, включающий следующие этапы:
a) Установка по крайней мере одного акустического датчика на грунт в предполагаемом месте прохождения трубопровода;
b) Принудительное возбуждение акустических колебаний в трубопроводе на произвольном расстоянии по крайней мере от одного акустического датчика;
c) Прием акустического сигнала от источника акустического сигнала акустическим датчиком;
d) Обработка акустического сигнала с определением последовательности акустических сигналов;
e) Обработка последовательности акустических сигналов методами автокорреляции и определение амплитуды пиков автокорреляционной функции;
f) Определение максимального значения амплитуды пиков автокорреляционной функции из определенных значений амплитуд пиков автокорреляционной функции на этапе «е»;
g) Перестановка по крайней мере одного датчика на новое место наиболее вероятного прохождения трубопровода;
h) Повторение этапов «с»-«f» необходимое количество раз;
i) Определение места прохождения трубопровода по месту установки датчика, с которого получено максимальное значение амплитуды пика автокорреляционной функции.
2. Способ по п. 1, отличающийся тем, что при использовании более одного акустического датчика, установленных на известном расстоянии друг от друга, место прохождения трубопровода определяют по месту установки акустического датчика, с которого получено максимальное значение амплитуды пика автокорреляционной функции.
3. Способ по п. 1, отличающийся тем, что при использовании более одного акустических датчиков, установленных на известном расстоянии друг от друга, в случае снижения наибольшего максимального значения амплитуды пика автокорреляционной функции на одном из акустических датчиков при перестановке акустических датчиков на новое место наиболее вероятного прохождения трубопровода, осуществляют корреляционную обработку принятых акустических сигналов с акустических датчиков, с последующим определением места нахождения пиков корреляционной функции, при этом место прохождения трубопровода определяют по рассчитанному отклонению трубопровода от акустических датчиков на основе расчета корреляционной функции и места нахождения пика корреляционной функции.
4. Способ по п. 1, отличающийся тем, что принудительное возбуждение акустических колебаний в трубопроводе осуществляется с помощью генератора, соединенного со средством создания акустических сигналов путем механического удара по поверхности трубопровода.
5. Способ по п. 1, отличающийся тем, что принудительное возбуждение акустических колебаний в трубопроводе осуществляется с помощью генератора, соединенного со средством создания акустических сигналов путем создания акустического сигнала пьезоизлучателем и передачи сигнала через волновод на поверхность трубопровода.
6. Способ по п. 1, отличающийся тем, что принудительное возбуждение акустических колебаний в трубопроводе осуществляется с помощью генератора, соединенного со средством создания акустических сигналов путем создания гидромеханических импульсов в жидкости, протекающей в трубопроводе.
7. Способ определения места прохождения трубопровода, включающий следующие этапы:
a) Установка по крайней мере двух акустических датчиков на грунт на известном расстоянии друг от друга, по разные стороны от оси предполагаемого места прохождения трубопровода;
b) Принудительное возбуждение акустических колебаний в трубопроводе на произвольном расстоянии по крайней мере от одного акустического датчика;
c) Прием акустического импульсного сигнала от источника акустического сигнала акустическими датчиками;
d) Корреляционная обработка акустического сигнала, с последующим определением пиков корреляционной функции;
e) Определение места прохождения трубопровода по рассчитанному отклонению трубопровода от акустических датчиков на основе расчета места нахождения пиков корреляционной функции.
8. Устройство определения места положения трубопровода для осуществления способа по любому из пп. 1, 7, содержащее генератор, по крайней мере один приемный тракт, который содержит последовательно соединенные акустический датчик, усилитель, фильтр и АЦП, соединенные с блоком обработки, к которому подключен индикатор и блок памяти, при этом генератор соединен со средством создания акустических сигналов, установленном на трубопроводе, а по крайней мере один акустический датчик расположен на грунте над трубопроводом в предполагаемом месте его прохождения, и акустически связан при помощи трубопровода со средством создания акустических сигналов.
9. Устройство по п. 8, отличающееся тем, что в качестве средства создания акустических сигналов применено механическое ударное устройство, приводимое в действие с помощью соленоида.
10. Устройство по п. 8, отличающееся тем, что в качестве средства создания акустических сигналов применен пьезоэлектрический излучатель, акустически связанный с трубопроводом.
11. Устройство по п. 8, отличающееся тем, что в качестве средства создания акустических сигналов применен излучатель гидромеханических импульсов.
| RU 120785 U1, 27.09.2012 | |||
| КОМПЛЕКСНЫЙ СПОСОБ ОБНАРУЖЕНИЯ НЕМЕТАЛЛИЧЕСКИХ ТРУБОПРОВОДОВ И ПОВРЕЖДЕНИЙ НА НИХ | 2005 |
|
RU2328020C2 |
| WO 9964886 A1, 16.12 | |||
| Металлический водоудерживающий щит висячей системы | 1922 |
|
SU1999A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСПОЛОЖЕНИЯ ТРУБОПРОВОДА | 2011 |
|
RU2482515C1 |
| US 20100018312 A1, 28.01 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ДИАГНОСТИКИ ДЕФЕКТОВ ГАЗОВЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2422814C1 |
| US 5417112 A, 23.05.1995. | |||

