Предлагаемое изобретение относится к способам контроля движения транспортных средств и, в частности, их обнаружения.
Существуют различные способы обнаружения объектов транспортной техники. Основные задачи, которые обычно решают при обнаружении транспортного средства, это: локализация транспортного средства в пространстве, его идентификация, определение его скорости и направления движения. Для решения этих задач в совокупности или по отдельности очень часто привлекают одновременно измерительные средства, работающие с разными видами физических полей: акустические (звуковой диапазон), сейсмические, оптические, инфракрасные и др., поскольку таким сочетанием легче достигается большая информативность и большая независимость от условий наблюдения.
Измерительные средства могут осуществлять свою работу как активным, так и пассивным образом, причем последний имеет значительное преимущество, поскольку не позволяет обнаружить присутствие измерительных средств в контролируемой зоне пространства. Тут можно упомянуть такие широко используемые при контроле дорожного движения микроволновые устройства активной локации, как милицейские ГИБДД-радары, которым, как известно, успешно противодействуют антирадары.
Чисто акустических пассивных способов обнаружения транспортных средств известно крайне мало, и это, скорее всего, потому, что известные способы до сих пор не позволяли решать все задачи обнаружения в совокупности.
Так, например, способ, по которому осуществляет свою работу устройство, известное из патента РФ №2509372 «Устройство обнаружения движущихся наземных транспортных средств по акустическим сигналам» (МПК G08G 1/01, G08G 1/04; дата приоритета 22.06.2012; Авторы: Дудкин В.А., Панков А.А., Акимова Ю.С., Патентообладатель: Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Пензенский государственный университет" (ФГБОУ ВПО "Пензенский государственный университет")), и в котором осуществляют прием акустического сигнала одним-единственным пассивным датчиком (микрофоном), усиливают и оцифровывают сигнал, а затем производят с ним различные манипуляции из области обработки, чтобы на принципах так называемой «нечеткой логики» принять либо не принять решение о наличии транспортного средства. Упомянутый способ, по утверждению авторов патента, может быть использован для помехоустойчивого обнаружения наземных транспортных средств по их акустическим сигналам при охране территорий и подступов к различным объектам, но из описания следует, что с его помощью можно только выделить транспортный шум из естественного акустического фона и зафиксировать факт нарушения границ охраняемой территории неопределенным транспортным средством.
Из патента US 7071841 «Truck acoustic data analyzer system» (МПК: G08G 1/04; G08G 1/052; G08G 1/054; G08G 1/056; дата приоритета: 19.08.2004; авторы: Haynes; Howard D. (Knoxville, TN), Akerman; Alfred (Knoxville, TN), Ayers; Curtis W. (Kingston, TN); патентообладатель: UT-Battelle, LLC (Oak Ridge, TN)) известен пассивный акустический способ определения скорости движения крупного грузового транспорта, в котором осуществляют прием и анализ сигнала с одного либо двух микрофонов и определяют скорость движения транспортного средства по доплеровскому смещению дискрет в частном спектре излучаемого им акустического шума. Способ предназначен для работы только с одним из видов существующих транспортных средств и для решения только одной из задач обнаружения транспортного средства.
В качестве прототипа выбран патент US 5444443 «Sound source determining system» (МПК G08G 1/01; Авторы: Umeda Misao, Ishikawa Keiichi; Патентообладатель: Ishikawa Manufacturing Co LTD [JP]; приоритетная заявка JP 19930223671 от 08.09.1993), в котором описывается работа системы, осуществляющей определение местоположения самолета на взлетной полосе в аэропорту. Прием сигнала осуществляют на не менее чем одну многоэлементную антенну - решетку микрофонов, с выходов которых сигнал подают на индивидуальные для каждого выбранного канала линии задержки, с перестраиваемым временем задержки, причем в каналах, соответствующих все более удаленным от середины приемной антенны микрофонам, осуществляют задержки сигнала на времена, кратные периоду, выделяемому селективными фильтрами, применяемыми при фильтрации принимаемого шума (…, -3τ, -2τ, -τ, 0, τ, 2τ, 3τ, …), где τ - период отфильтрованной спектральной компоненты. Затем производят суммирование всех сигналов с выходов линий задержки.
Суммарный сигнал подают на вход перестраиваемого (адаптивного) фильтра, центр полосы фильтра соответствует некоторой частоте (ƒ0=1/τ) в спектре сигнала (шума турбины самолета). Перестройку задержек в каждом приемном элементе антенны выполняют совместно с частотной перестройкой фильтра. Добиваются максимизации полного суммарного сигнала на выходе приемной антенны (выбранной спектральной компоненты), что отвечает некоторому угловому направлению, с которого приходит плоский фронт волны на выбранной частоте. Азимутальное направление на транспортное средство автоматически вычисляется по задержке в устройстве определения угла путем построения линии-радиуса, идущего от центра приемной антенны в сторону источника. Указанная линия дает направление на шумящее транспортное средство. При применении одновременно двух и более решеток микрофонов получают возможность вычислить положение шумящего транспортного средства.
Прототип направлен на решение очень узкой и специфической задачи - выявление локализации неподвижного транспортного средства - самолета с включенными турбинными двигателями, приземлившегося или готовящегося к взлету, на открытом пространстве поля аэропорта. Следует отметить, что турбины самолета являются источниками очень мощного воздушно-акустического некогерентного широкополосного шума. В прототипе приходится использовать громоздкую хорошо развитую приемную антенну (в прототипе порядка 15 м в длину, т.е. с широкой апертурой (много длин волн) и с очень плотным заполнением датчиками (шаг - меньше половины длины волны)).
Каждый из датчиков должен обладать достаточно широкой рабочей частотной полосой в силу того, что шум предполагаемого источника не имеет спектральных компонент, излучение которых обладало бы взаимной пространственной когерентностью, способных интерферировать между собой и обеспечить в его угловом волновом спектре характерные для данного транспортного средства всплески, которые позволяли бы решать задачу обнаружения только за счет углового разрешения приемной антенны, описанную в прототипе, даже в условиях отсутствия на открытом поле аэродрома реверберации, даже при минимально возможном уровне помех (т.е. в отсутствие рядом других неподвижных самолетов с включенными турбинами либо взлетающих или идущих на посадку самолетов).
Использование одной многоэлементной линейной решетки акустических датчиков позволяет определить азимутальное направление на транспортное средство, использование нескольких - определить координаты транспортного средства (выявить его локализацию). Если же помехи существенные, например реверберационные, то предлагаемый способ перестает быть эффективным, поскольку не позволяет ни разрешить два плотно стоящих рядом транспортных средства с работающими турбинами, ни выделить транспортное средство на фоне шума от другого близко движущегося аналогичного транспортного средства. Можно констатировать, что основная масса задач обнаружения отпадает в случае прототипа сама собой, поскольку является не решаемой в принципе в силу особенностей выбранного для обнаружения транспортного средства и условий наблюдения.
Таким образом, недостатками прототипа являются: сложность и громоздкость регистрирующей аппаратуры, низкая помехоустойчивость, возможность работать только с неподвижными транспортными средствами и решать только одну из задач обнаружения - локализации транспортного средства в пространстве.
Задачей, на решение которой направлено предлагаемое изобретение, является создание пассивного способа обнаружения транспортного средства по его собственному акустическому шуму, который позволял бы одновременно выявлять локализацию транспортного средства в пространстве, осуществлять его идентификацию, определять его скорость и направление движения.
Технический эффект достигается тем, что осуществляют регистрацию полезного сигнала, излучаемого в окружающую атмосферу транспортным средством, с помощью не менее чем одной приемной антенны, состоящей из размещенных в линию с постоянным шагом акустических датчиков, и определяют азимутальное направление на транспортное средство относительно центра приемной антенны.
Новым, в случае реализации изобретения по п. 1 формулы, является то, что начинают осуществлять регистрацию полезного сигнала при условии превышения им порогового уровня акустического фона окружающего пространства в спокойную погоду Р=60 дБ, а при условии превышения уровнем полезного сигнала порогового уровня акустического фона на 6 дБ в течение длительности полной реализации сигнала 10-20 с синхронно принимают полезный сигнал на две приемные антенны, каждая из которых состоит из K≥16 акустических датчиков, размещенных в линию вдоль трассы движения на известном расстоянии Н от нее с шагом d не более 1/4 длины звуковой волны λ используемого приемными антеннами участка в среднечастотном звуковом диапазоне 50-1000 Гц, причем Kd>>λ, а расстояние L между центрами приемных антенн составляет 50-200 м, оцифровывают принятый сигнал от каждой приемной антенны с частотой дискретизации ƒi и размещают в памяти вычислительного устройства сигналы, принятые каждым k-м датчиком каждой приемной антенны, в виде k-го цифрового массива, для каждого датчика разбивают длительность полной реализации сигнала на N равных временных интервалов длительности τ, осуществляют идентификацию транспортного средства по наблюдаемому в его амплитудном спектре поведению максимумов в характерной для данного транспортного средства частотной полосе ΔF, создают два квадратурных канала по каждому k-му датчику каждой приемной антенны путем построения cos(2πƒjt) и sin(2πƒjt) БПФ-спектров сигнала на каждом n-м временном интервале и формируют добавки к фазе спектральных компонент сигнала для последующего сканирования по углу максимума главного лепестка характеристики направленности приемной антенны  , где
, где  ,
,  , ƒj(j→j+1) - шаг перестройки частоты, осуществляют перестройку в характерной для данного транспортного средства частотной полосе ΔF и в ней же производят обратное БПФ-преобразование для получения суммарного сигнала с выхода каждой из двух приемных антенн на n-м временном интервале. Для каждого n-го временного интервала по суммарному сигналу с выхода каждой из двух приемных антенн в полярных координатах строят веерные диаграммы, характеризующие азимутальное распределение максимумов модуля амплитудного отклика приемной антенны на собственный акустический шум транспортного средства, и убеждаются в наличии транспортного средства на трассе по присутствию в веерных диаграммах пиков с перепадом от максимума до ближайшего минимума не менее 15 дБ. Затем определяют азимутальное направление на транспортное средство относительно центра каждой приемной антенны в текущем n-м временном интервале как средневзвешенное значение углов максимальных пиков в веерной диаграмме. По знаку разности средневзвешенных значений углов максимальных пиков в веерной диаграмме для двух следующих друг за другом n-го и n+1-го временных интервалов любой из приемных антенн принимают решение о направлении движения транспортного средства по трассе, текущую координату xn транспортного средства на трассе определяют как точку пересечения линий
, ƒj(j→j+1) - шаг перестройки частоты, осуществляют перестройку в характерной для данного транспортного средства частотной полосе ΔF и в ней же производят обратное БПФ-преобразование для получения суммарного сигнала с выхода каждой из двух приемных антенн на n-м временном интервале. Для каждого n-го временного интервала по суммарному сигналу с выхода каждой из двух приемных антенн в полярных координатах строят веерные диаграммы, характеризующие азимутальное распределение максимумов модуля амплитудного отклика приемной антенны на собственный акустический шум транспортного средства, и убеждаются в наличии транспортного средства на трассе по присутствию в веерных диаграммах пиков с перепадом от максимума до ближайшего минимума не менее 15 дБ. Затем определяют азимутальное направление на транспортное средство относительно центра каждой приемной антенны в текущем n-м временном интервале как средневзвешенное значение углов максимальных пиков в веерной диаграмме. По знаку разности средневзвешенных значений углов максимальных пиков в веерной диаграмме для двух следующих друг за другом n-го и n+1-го временных интервалов любой из приемных антенн принимают решение о направлении движения транспортного средства по трассе, текущую координату xn транспортного средства на трассе определяют как точку пересечения линий  и
и  , идущих из центров приемных антенн по направлениям средневзвешенных значений углов максимальных пиков в веерных диаграммах обеих приемных антенн для n-го временного интервала, используя координаты транспортного средства в соседние n-й и n+1-й временные интервалы xn и xn+1 определяют скорость движения V=(xn+1 - xn)/τ.
, идущих из центров приемных антенн по направлениям средневзвешенных значений углов максимальных пиков в веерных диаграммах обеих приемных антенн для n-го временного интервала, используя координаты транспортного средства в соседние n-й и n+1-й временные интервалы xn и xn+1 определяют скорость движения V=(xn+1 - xn)/τ.
Новым, в случае реализации изобретения по п. 2 формулы является то, что начинают осуществлять регистрацию полезного сигнала при условии превышения им порогового уровня акустического фона окружающего пространства в спокойную погоду Р=60 дБ, а при условии превышения уровнем полезного сигнала порогового уровня акустического фона на 6 дБ в течение длительности полной реализации сигнала 10-20 с синхронно принимают полезный сигнал на две приемные антенны, каждая из которых состоит из K≥16 акустических датчиков, размещенных в линию вдоль трассы движения на известном расстоянии Н от нее с шагом d не более 1/4 длины звуковой волны λ используемого приемными антеннами участка в среднечастотном звуковом диапазоне 50-1000 Гц, причем расстояние L между центрами приемных антенн составляет 10-50 м, оцифровывают принятый сигнал от каждой приемной антенны с частотой дискретизации ƒi и размещают в памяти вычислительного устройства сигналы, зарегистрированные каждым k-м датчиком каждой приемной антенны, в виде k-го цифрового массива. Для каждого датчика разбивают длительность полной реализации сигнала на N равных временных интервалов длительности τ, осуществляют идентификацию транспортного средства по наблюдаемому в его амплитудном спектре поведению максимумов в характерной для данного транспортного средства частотной полосе ΔF, определяют направление движения транспортного средства и его местоположение относительно приемной антенны по знаку наклона зависимости времени задержки корреляционного максимума свертки массивов, соответствующих отдельным участкам полной реализации сигнала gkn=gkn(t), со все более разносимых пар датчиков в одной приемной антенне, и по динамике ее наклона при переходе от текущего n-го к последующему n+1-му временному интервалу, определяют азимутальное направление на транспортное средство относительно центра одной из приемных антенн как равное 90° и фиксируют местонахождение транспортного средства на траверзе данной приемной антенны в момент обращения в нуль угла наклона зависимости времени задержки корреляционного максимума свертки, берут автокорреляционную функцию суммарного массива данных с обеих приемных антенн с последующим суммированием по всем элементам каждой из приемных антенн и определяют скорость транспортного средства как отношение расстояния между центрами приемных антенн к интервалу времени между характерными максимумами в автокорреляционной функции.
Изобретение поясняется следующими чертежами.
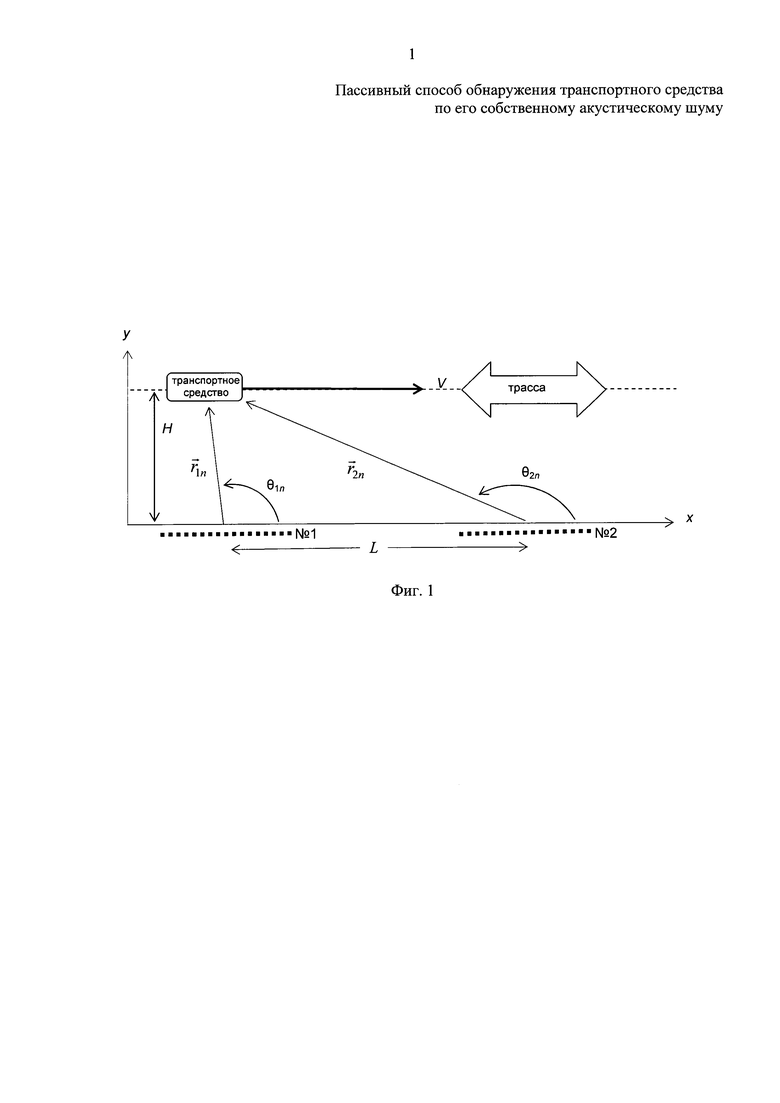
На фиг. 1 приведена схема проведения измерений: L - расстояние между центрами приемных антенн, Н - расстояние до трассы, и - линии, идущие из центров соответственно первой и второй приемных антенн по направлению к транспортному средству под азимутальными углами соответственно θ1n и θ2n в n-й интервал времени.
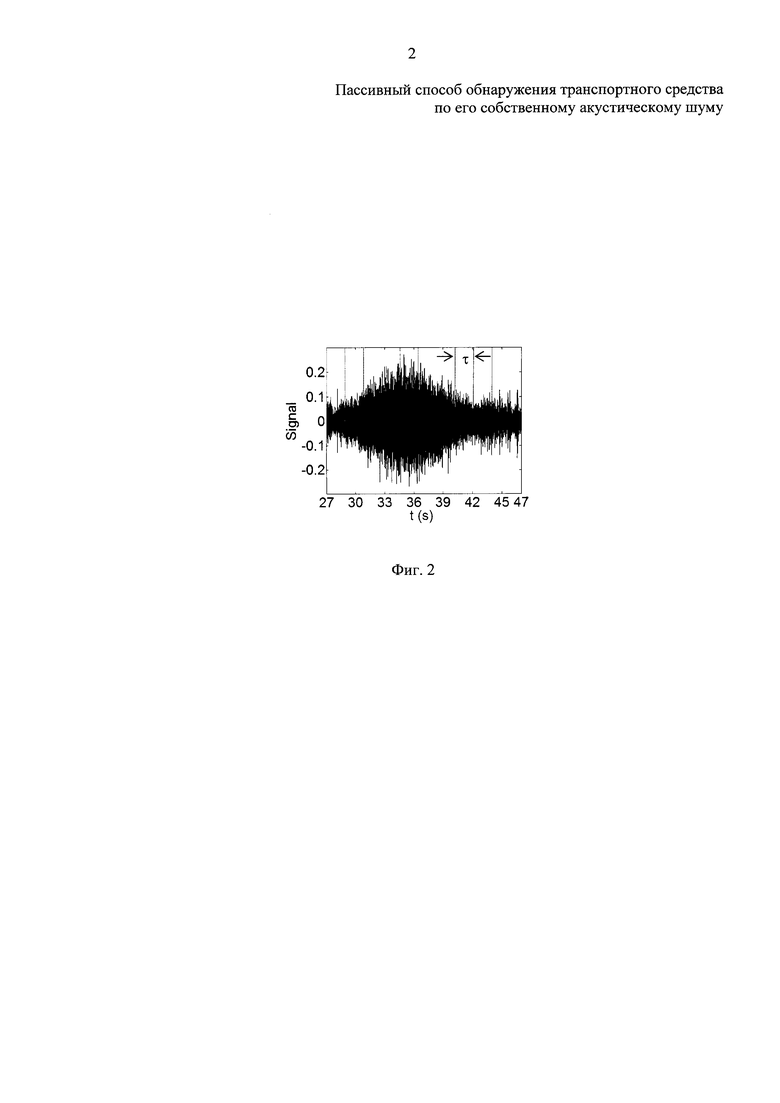
Фиг. 2 иллюстрирует принятый в течение длительности полной реализации сигнала собственный акустический шум трамвайного вагона, превышающий уровень акустического фона более чем на 6 дБ. По оси абсцисс - время в секундах, по оси ординат - безразмерные единицы.
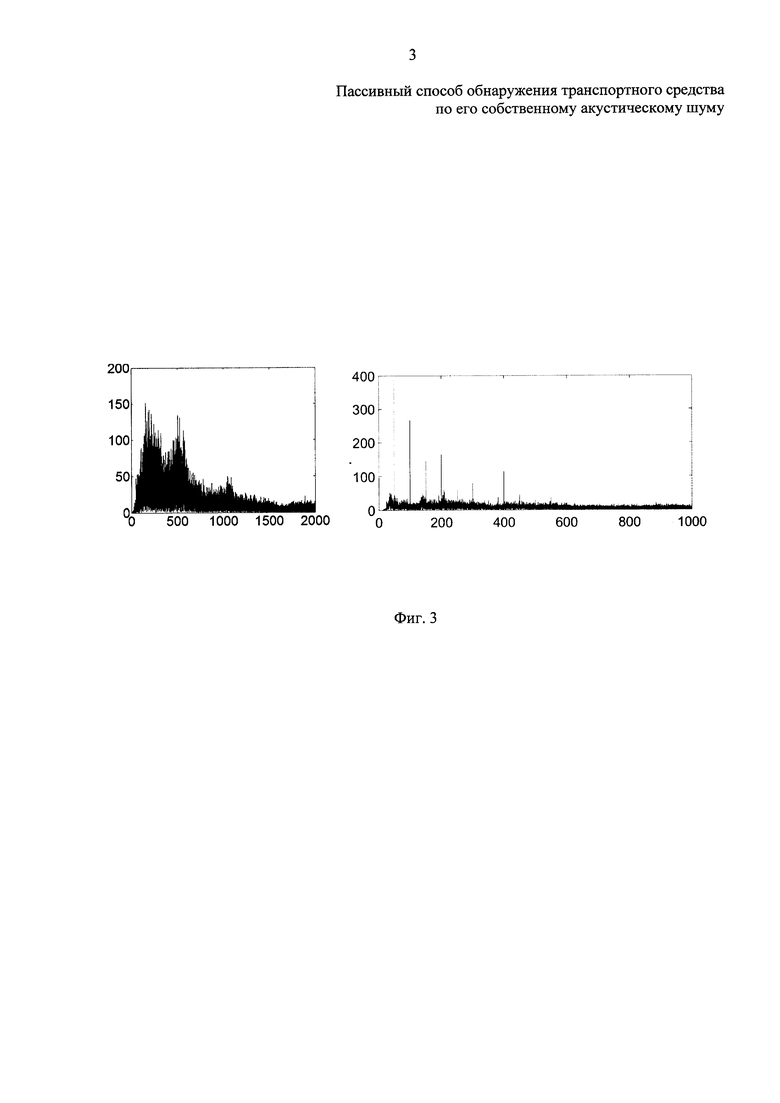
На фиг. 3 приведены экспериментальные амплитудные спектры принятых в течение длительности полной реализации сигналов для трамвайного вагона (слева) и легкового автомобиля (справа). По оси абсцисс - частота в герцах, по оси ординат - безразмерные единицы.
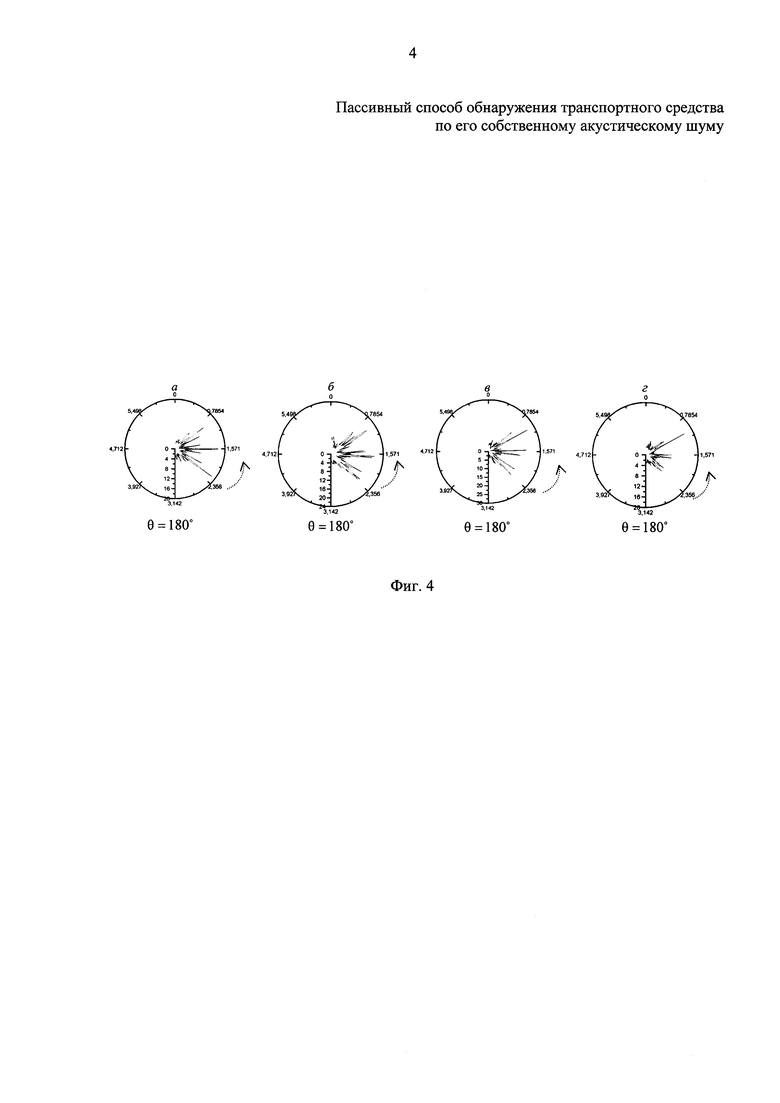
На фиг. 4 приведены полученные экспериментально веерные диаграммы, иллюстрирующие азимутальное распределение максимумов модуля амплитудного отклика приемной антенны на собственный акустический шум трамвайного вагона, для разных временных промежутков: n=1, транспортное средство приближается к траверзу приемной антенны (случай а); n=4, момент прохождения транспортным средством траверза приемной антенны (случай б); n=6 (случай в), n=8 (случай г), транспортное средство удаляется от траверза приемной антенны. Стрелка указывает направление движения транспортного средства: движение вагона начинается при θ=180° и далее происходит по стрелке до θ=0°.
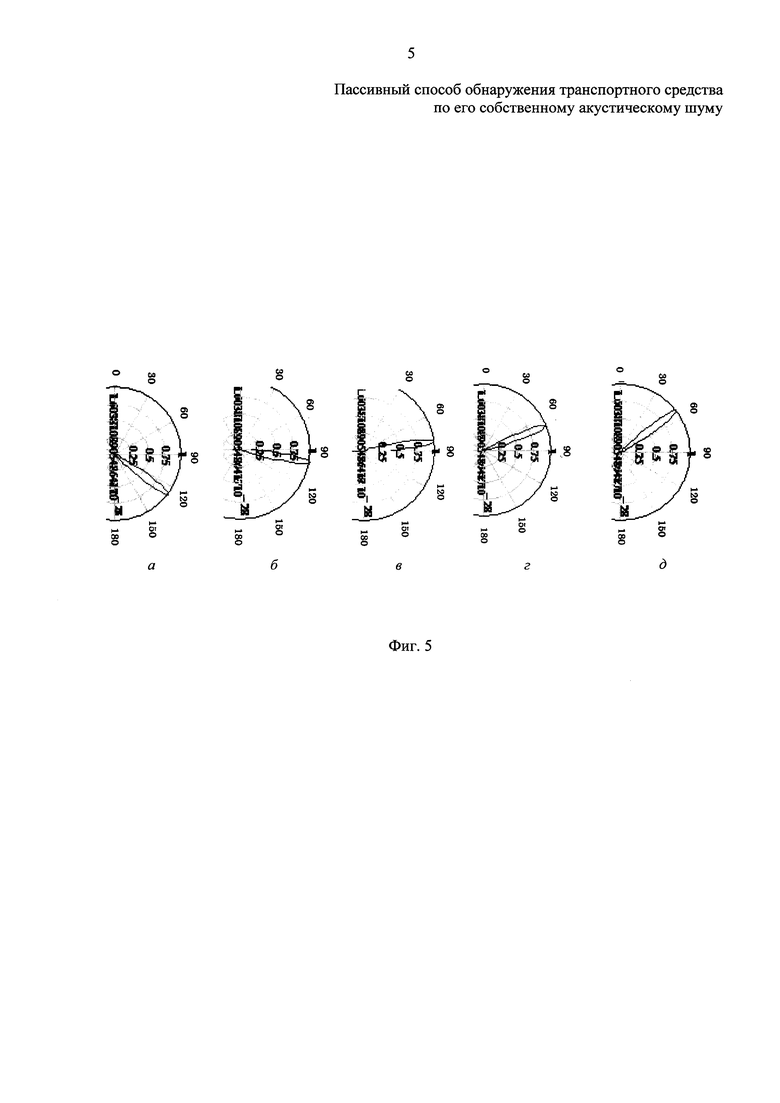
На фиг. 5 приведены полученные по экспериментальным данным диаграммы в тех же полярных координатах, что и веерные диаграммы, в которых лепесток своим максимумом указывает азимутальное направление на транспортное средство для данного временного интервала, вычисленное по формуле для средневзвешенных значений углов: а - транспортное средство приближается к траверзу приемной антенны; б, в - момент прохождения транспортным средством траверза приемной антенны; г, д - транспортное средство удаляется от траверза приемной антенны.
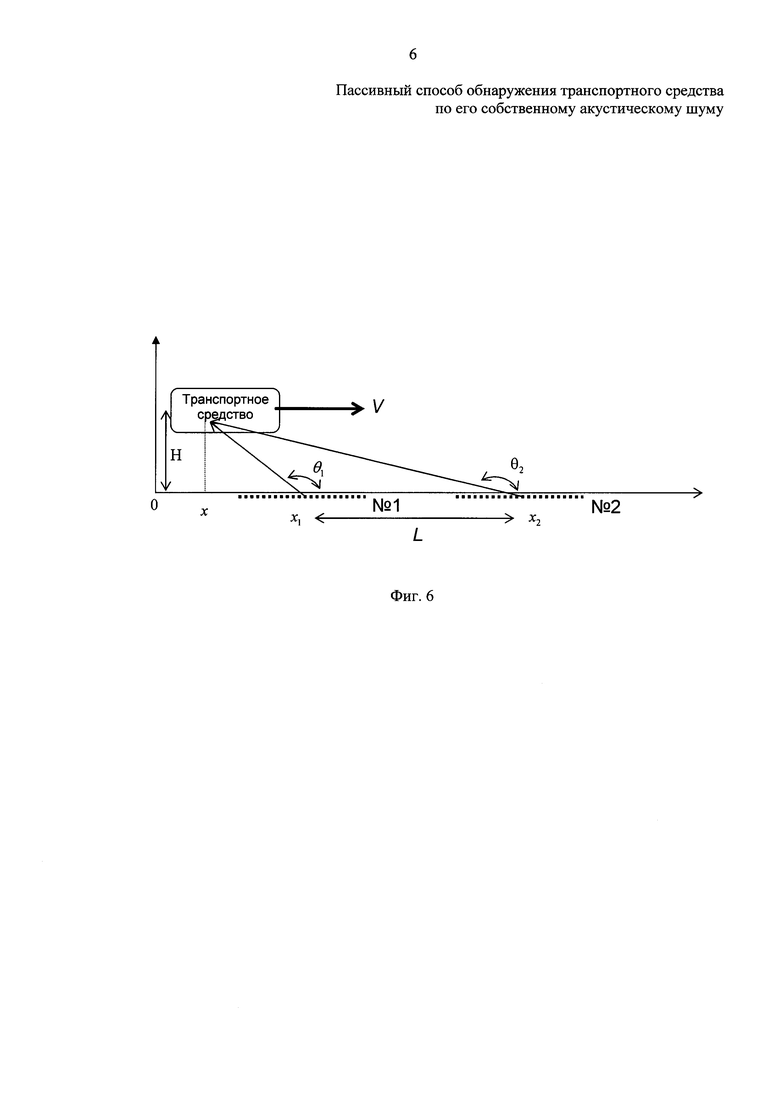
Фиг. 6 иллюстрирует текущее расположение транспортного средства относительно приемных антенн.
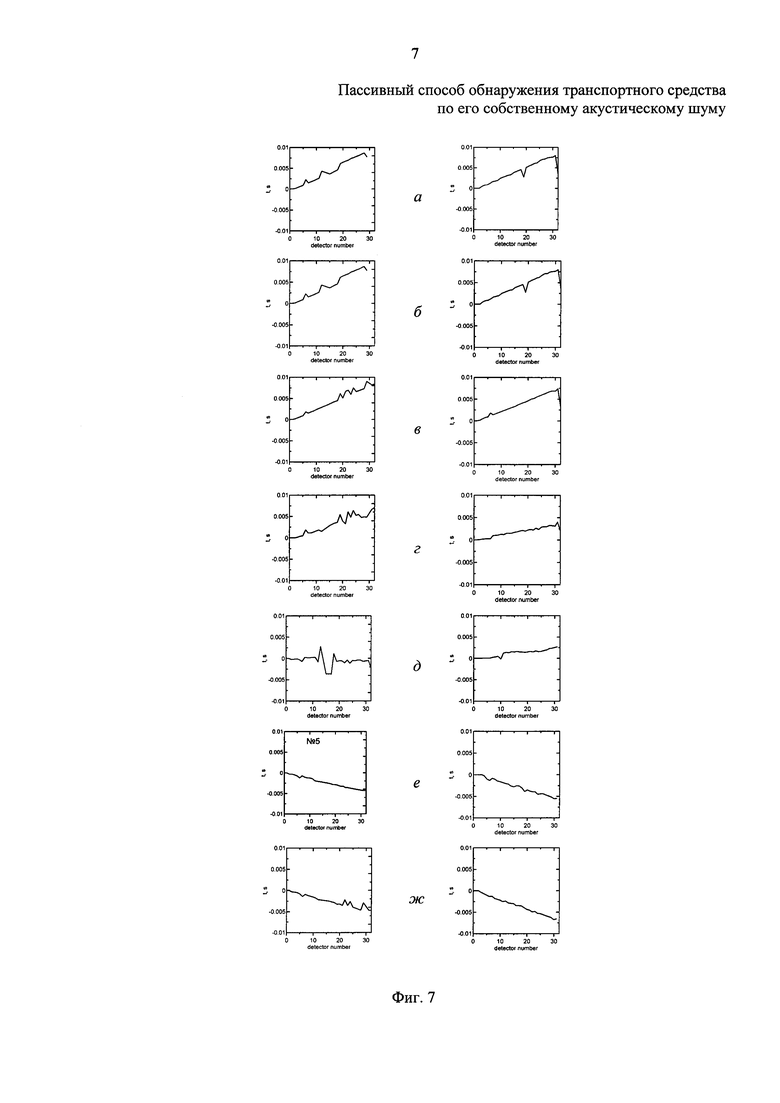
На фиг. 7 приведены некоторые из полученных по экспериментальным данным характерных зависимостей времени задержки корреляционных максимумов от номера пары датчиков для разных временных интервалов, n увеличивается сверху вниз, в случае рельсового транспорта (слева) и легкового автотранспорта (справа): транспортное средство приближается к траверзу приемной антенны слева направо (случаи а, б, в, г); n=4, момент прохождения транспортным средством траверза приемной антенны (случай д); транспортное средство удаляется от траверза приемной антенны (случаи е, ж).
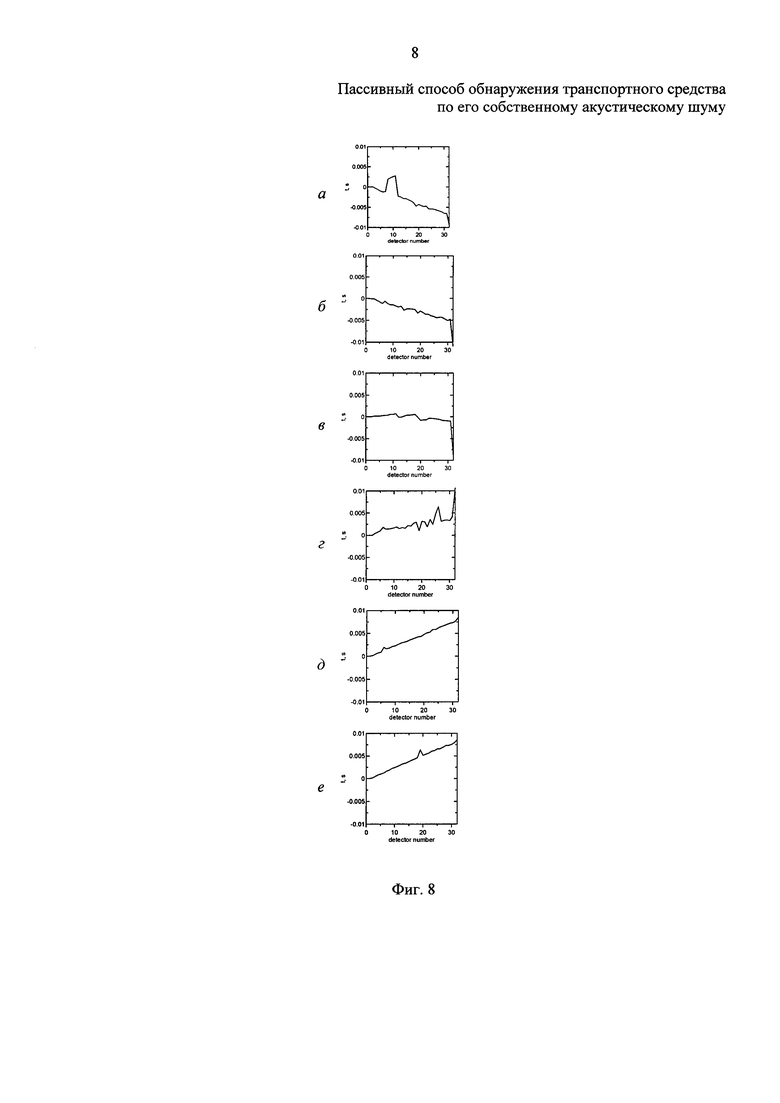
На фиг. 8 приведены некоторые из полученных по экспериментальным данным характерных зависимостей времени задержки корреляционных максимумов от номера пары датчиков для разных временных интервалов, n увеличивается сверху вниз, в случае легкового автотранспорта, движущегося справа налево: транспортное средство приближается к траверзу приемной антенны слева направо (случаи а, б); n=4, момент прохождения транспортным средством траверза приемной антенны (случай в); транспортное средство удаляется от траверза приемной антенны (случаи г, д, е).
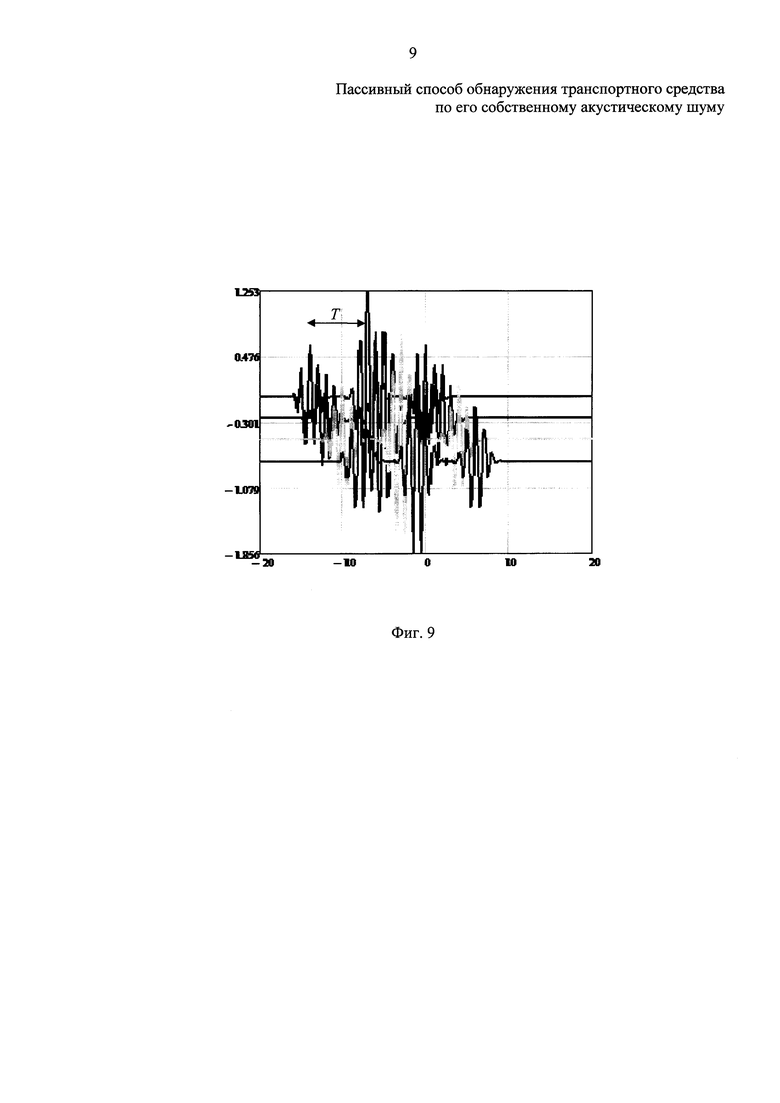
На фиг. 9 приведен пример моделирования автокорреляционных функций для первых четырех датчиков обеих приемных антенн 1-1, 2-2, 3-3, 4-4. По оси абсцисс - время задержки в безразмерных единицах, по оси ординат - безразмерные единицы.
Для обоих случаев реализации предлагаемого пассивного способа обнаружения транспортного средства по его собственному акустическому шуму схема измерений одинакова и осуществляется следующим образом.
Параллельно трассе, по которой происходит движение транспорта, на известном расстоянии от нее Н (см. фиг. 1) размещают две приемные антенны, каждая из которых состоит из K≥16 акустических датчиков, размещенных в линию вдоль трассы движения с шагом d не более 1/4 длины звуковой волны λ используемого приемными антеннами участка в среднечастотном звуковом диапазоне 50-1000 Гц. Поскольку производимый транспортными средствами акустический шум характеризуется широкой частотной полосой, для измерений используют акустические датчики, рабочая полоса частот которых перекрывает среднечастотный звуковой диапазон. Центры обеих приемных антенн разнесены друг относительно друга на расстояние L.
Регистрацию полезного сигнала обеими приемными антеннами начинают при условии превышения им порогового уровня акустического фона окружающего пространства в спокойную погоду Р=60 дБ. Принимать полезный сигнал для его последующей обработки начинают, когда полезный сигнал на обеих приемных антеннах превысит уровень порогового акустического фона не менее чем на 6 дБ. Полезный сигнал принимают обеими приемными антеннами синхронно в течение промежутка времени 10-20 с, называемого длительностью полной реализации сигнала, при условии, что в этот промежуток времени уровень сигнала продолжает превышать пороговый уровень акустического фона не менее чем на 6 дБ (см. фиг. 2). Затем оцифровывают принятые сигналы от каждой приемной антенны с некоторой частотой дискретизации при оцифровке ƒj и размещают в памяти вычислительного устройства сигнал, зарегистрированный каждым k-м акустическим датчиком приемной антенны, в виде цифрового массива (каждому датчику соответствует свой k-й массив). После этого для каждого акустического датчика разбивают длительность полной реализации сигнала на N временных интервалов равной длительности τ=1-2 с, с тем чтобы далее иметь возможность анализировать характер изменения во времени параметров принимаемого полезного сигнала. На каждом k-м акустическом датчике имеются участки полной реализаций сигнала gkn=gkn(t) при n⋅τ≤t≤(n+1)⋅τ, которые являются реализациями сигнала на n-м временном интервале.
На всех приведенных далее в качестве примера фигурах количество временных интервалов N=10, частота дискретизации ƒj=1 Гц, количество акустических датчиков в каждой приемной антенне K=32 и размещены они с шагом d=0,1 м, что не исключает в общем случае реализации способа других значений упомянутых параметров.
Затем осуществляют идентификацию транспортного средства по наблюдаемому в его амплитудном спектре поведению максимумов амплитудного спектра в определенной частотной полосе ΔF.
Известно, что разные виды транспортных средств обладают характерными только для них спектральными «портретами». В некоторых способах идентификации транспортных средств их так и узнают по характерным «картинкам». Для примера на фиг. 3 приведены амплитудные спектры для трамвая (сплошной) и легкового автомобиля (дискретный). Но главной отличительной особенностью каждого вида транспортного средства, как выяснили авторы изобретения в результате исследований, является наличие индивидуальных для данного транспортного средства максимумов в амплитудном спектре принятого сигнала в характерной частотной полосе ΔF, лежащей в среднечастотном диапазоне. Наличие таких максимумов обусловлено тем, что в отличие от источника шума в прототипе, у которого шумовое излучение во всей широкой полосе расфазировано по волновому фронту, у рассматриваемых транспортных средств в обозначенном частотном интервале на масштабе порядка апертуры приемной антенны определенные компоненты акустического шума, имеющие в области локализации транспортного средства значительную амплитуду, сохраняют пространственное распределение фазы по фронту, и при распространении эти акустические волны интерферируют, что и проявляется характерными только данному транспортному средству «всплесками» в амплитудном спектре. Иными словами, собственный акустический шум рассматриваемых транспортных средств является частично когерентным, и для каждого конкретного транспортного средства он является частично когерентным по-своему в зависимости от вида транспортного средства. Разумеется, для осуществления идентификации в памяти вычислительного устройства хранят некоторую наработанную «базу» признаков, характерных для различных транспортных средств.
Далее операции осуществления способа по пп. 1 и 2 формулы начинают различаться.
Для реализации изобретения по п. 1 формулы создают два квадратурных канала по каждому k-му акустическому датчику каждой приемной антенны путем построения cos(2πƒjt) и sin(2πƒjt) БПФ-спектров сигнала на каждом n-м временном интервале, т.е. строят cos и sin Фурье-спектры каждого из n отдельных участков полной реализации сигнала gkn=gkn(t):
 ,
,
 ,
,
при этом для каждого k, n и ƒ имеют место свои фаза  и модуль -
и модуль -  .
.
Затем формируют добавки к фазе спектральных компонент сигнала для последующего сканирования по углу максимума главного лепестка характеристики направленности приемной антенны.
Для этого вводят новую дискретную переменную  и соответствующую ей переменную величину - угол сканирования . Формирование сканированной (веерной) диаграммы направленности осуществляют на основе введения дополнительного набега фазы сигнала. С учетом дополнительно введенной переменной
и соответствующую ей переменную величину - угол сканирования . Формирование сканированной (веерной) диаграммы направленности осуществляют на основе введения дополнительного набега фазы сигнала. С учетом дополнительно введенной переменной  , массив значений которой составляет
, массив значений которой составляет  , теперь имеем четыре переменные , k, n, ƒ, где
, теперь имеем четыре переменные , k, n, ƒ, где  , k=1…K, n=1…N и ƒi - шаг перестройки от минимальной до максимальной частоты в характерной для данного вида транспортного средства частотной полосе ΔF (перестройку частоты осуществляют с тем же шагом, с которым осуществляли дискретизацию принимаемого сигнала). Дополнительный набег фазы определяется выражением:
, k=1…K, n=1…N и ƒi - шаг перестройки от минимальной до максимальной частоты в характерной для данного вида транспортного средства частотной полосе ΔF (перестройку частоты осуществляют с тем же шагом, с которым осуществляли дискретизацию принимаемого сигнала). Дополнительный набег фазы определяется выражением:
 ,
,
где фигурирующая численная константа 2πd/сзвук имеет размерность единицы времени (при шаге приемной антенны d=0,1 м она составляет 0,001848 с).
При каждом дискретном значении ƒj строят новый комплексный спектр:

Далее выполняют суммирование вновь образованных спектральных компонент по всем акустическим датчикам каждой приемной антенны k=1…K с учетом фазовых добавок:


Затем осуществляют воспроизведение сигнала путем обратного Фурье-преобразования спектральных компонент (интервал значений j) в интересующей нас частотной полосе ΔF от ƒmin до ƒmax, характерной для данного вида транспортного средства, и получение на этой основе суммарного амплитудного отклика на выходе приемной антенны на n-м интервале времени:

Для каждого n-го временного интервала по суммарному амплитудному отклику на выходе каждой из двух приемных антенн строят веерные диаграммы в полярных координатах. Для этого осуществляют вычисление максимальных значений модулей амплитудного отклика на выходе приемной антенны на n-м интервале времени при пошаговой перестройке фазы следующим образом. Для каждого n-го временного интервала для каждой из приемных антенн за счет перехода  и добавления
и добавления  в фазу
в фазу  выполняют смену угла сканирования и на основе перебора всех направлений
выполняют смену угла сканирования и на основе перебора всех направлений  , создают набор откликов
, создают набор откликов  , соответствующий всем углам азимута. Для каждого
, соответствующий всем углам азимута. Для каждого  берут максимум модуля
берут максимум модуля  , достигаемый при каком-то t. Строят веерную диаграмму, т.е. зависимость
, достигаемый при каком-то t. Строят веерную диаграмму, т.е. зависимость  от , т.е. от
от , т.е. от  для . В следующий n+1 временной интервал, сдвинутый на τ относительно n-го, получим
для . В следующий n+1 временной интервал, сдвинутый на τ относительно n-го, получим  и, соответственно
и, соответственно  , и т.д. Для каждого временного интервала n и соответственно каждого значения
, и т.д. Для каждого временного интервала n и соответственно каждого значения  на данном временном интервале находят максимум модуля амплитудного отклика, который откладывают на веерной диаграмме вдоль по радиусу. Таким образом, на основе формирования фазовых добавок для каждого временного интервала n строят две веерные диаграммы - визуализируют результат сканирования главного лепестка характеристики направленности каждой из приемных антенн.
на данном временном интервале находят максимум модуля амплитудного отклика, который откладывают на веерной диаграмме вдоль по радиусу. Таким образом, на основе формирования фазовых добавок для каждого временного интервала n строят две веерные диаграммы - визуализируют результат сканирования главного лепестка характеристики направленности каждой из приемных антенн.
Интерферирующие компоненты акустического сигнала, принимаемого антенной, состоящей из множества акустических датчиков, проявляются на веерных диаграммах как периодическая модуляция уровня модуля амплитудного отклика - на веерных диаграммах формируются характерные пики (см. фиг. 4).
Совокупность резких выбросов на веерной диаграмме, если провалы от минимального до максимального их значения достигают 15 дБ и выше, служит подтверждением наличия транспортного средства на трассе. Именно то, что обратное БПФ-преобразование производят в характерной частотной полосе, в которой для данного вида транспортного средства присутствуют области частичной когерентности принимаемого сигнала, обуславливает наличие таких резких перепадов в веерной диаграмме.
При наличии на веерной диаграмме одного или нескольких выделенных по амплитуде пиков указанного вида азимутальное направление на транспортное средство относительно центра каждой приемной антенны для текущего n-го временного интервала вычисляется как средневзвешенное значение углов максимальных пиков в веерной диаграмме по формуле:
 ,
,
где 1≤m≤М, М~3…5, Am - относительный вес каждого из максимальных (от двух до пяти) пиков в угловом распределении,  - азимутальный угол, соответствующий максимуму m-го пика на веерной диаграмме n-го временного интервала.
- азимутальный угол, соответствующий максимуму m-го пика на веерной диаграмме n-го временного интервала.
На фиг. 5 продемонстрированы диаграммы в полярных координатах, на каждой из которых обозначено азимутальное направление на транспортное средство для данного временного интервала, вычисленное по формуле для средневзвешенных значений углов.
По двум веерным диаграммам, построенным для двух следующих друг за другом временных интервалов n-го и n+1-го находят средневзвешенные значения углов максимальных пиков в обеих веерных диаграммах и по знаку их разности определяют направление движения транспортного средства. В зависимости от того  , либо наоборот
, либо наоборот  - принимается решение о направлении движения объекта справа налево или слева направо соответственно.
- принимается решение о направлении движения объекта справа налево или слева направо соответственно.
По веерным диаграммам, построенным для n-го интервала времени, для обеих приемных антенн определяют средневзвешенные значения углов максимальных пиков в обеих веерных диаграммах, дающие текущее азимутальное направление на транспортное средство относительно центра каждой приемной антенны. Точка пересечения линий  и
и  , идущих из центров приемных антенн под указанными азимутальными углами, дает текущую координату xn транспортного средства на трассе для n-го интервала времени. Эту координату в выбранной системе отсчета всегда можно рассчитать. Так, для приведенного на фиг. 6 примера расположения транспортного средства относительно центров первой и второй приемных антенн, лежащих вдоль оси х с произвольно выбранной начальной точкой отсчета, с координатами в данной системе отсчета x1 и х2, рассчитать текущую координату транспортного средства можно с помощью следующих выкладок:
, идущих из центров приемных антенн под указанными азимутальными углами, дает текущую координату xn транспортного средства на трассе для n-го интервала времени. Эту координату в выбранной системе отсчета всегда можно рассчитать. Так, для приведенного на фиг. 6 примера расположения транспортного средства относительно центров первой и второй приемных антенн, лежащих вдоль оси х с произвольно выбранной начальной точкой отсчета, с координатами в данной системе отсчета x1 и х2, рассчитать текущую координату транспортного средства можно с помощью следующих выкладок:
 .
.
х1+х2-2х=-H(ctgθ1+ctgθ2),
 .
.
Используя данные о местоположениях объекта xn и xn+1 в соседние n-й и n+1-й интервалы времени, определяют скорость движения V=(xn+1-xn)/τ, где τ - длительность одного временного интервала, совокупность которых составляет длительность полной реализации сигнала Т=N⋅τ.
Следует отметить, что реализация изобретения по п. 1 формулы имеет определенную специфику. Во-первых, поскольку вычислительная обработка в этом варианте реализации способа занимает значительное количество времени, необходимо разнести приемные антенны на существенное расстояние друг от друга L=50-200 м, чтобы гарантировать возможность осуществления необходимых вычислений за время проезда транспортного средства от одной приемной антенны до другой. Кроме того, должно выполняться соотношение Kd>>λ - каждая приемная антенна должна быть хорошо развитой, это условие накладывается для того, чтобы минимизировать паразитное влияние уровня боковых лепестков в характеристике направленности приемной антенны по сравнению с главным лепестком и снизить отрицательное влияние эффектов «изрезанности» диаграммы направленности. И, наконец, чтобы гарантированно разрешить отдельное транспортное средство при достаточно интенсивном движении транспорта по трассе, необходимо исключить попадание в пределы главного лепестка характеристики направленности приемной антенны более чем одного объекта. Для этого должно быть соблюдено условие  , где D - дистанция между транспортными средствами на трассе. Но, с другой стороны, можно упомянуть, что и никакие другие из существующих способов обнаружения транспортных средств при достаточно плотном потоке движения транспорта по трассе тоже не работают.
, где D - дистанция между транспортными средствами на трассе. Но, с другой стороны, можно упомянуть, что и никакие другие из существующих способов обнаружения транспортных средств при достаточно плотном потоке движения транспорта по трассе тоже не работают.
Для реализации способа по п. 2 после приема, оцифровки полезного сигнала и идентификации транспортного средства осуществляют следующие операции.
Для n-го временного интервала вычисляют взаимно корреляционную функцию отдельных участков полной реализации сигнала gkn=gkn(t), зарегистрированных акустическими датчиками одной приемной антенны на данном временном интервале n⋅τ≤t≤(n+1)⋅τ, путем свертки соответствующих этим участкам полной реализации сигнала массивов с выхода акустических датчиков, все более разносимых по апертуре приемной антенны. Опорным является первый (крайний левый) датчик в приемной антенне, и последовательно осуществляют свертку массивов, соответствующих всем датчикам в приемной антенне, взятым попарно с опорным следующим образом: 1-1, 1-2, … 1-k, … 1-K.
 для k=1…K и для (n-1)τ≤t≤(n+1)τ
для k=1…K и для (n-1)τ≤t≤(n+1)τ
Затем для всех временных интервалов строят графики зависимости τn(k) задержки корреляционного максимума свертки для всех перебираемых пар датчиков в апертуре приемной антенны для каждого временного интервала (см. фиг. 7 и фиг. 8).
Направление движения транспортного средства (слева направо или справа налево) и его местоположение относительно приемной антенны (текущее положение источника шума слева или справа от ее точки траверза) определяют по знаку наклона зависимости времени задержки корреляционного максимума свертки (∂τn/∂k>0 либо ∂τn/∂k<0) и по динамике ее наклона при переходе от текущего n-го к последующему n+1-му временному интервалу (см. Таблицу 1).
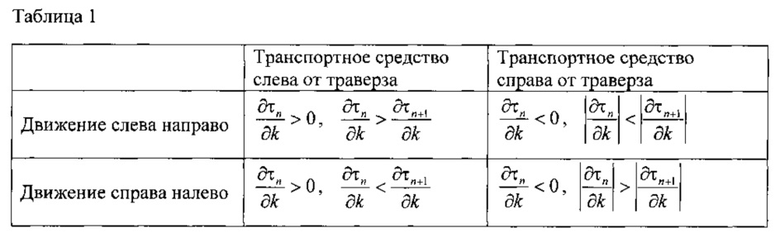
При обращении в нуль угла наклона зависимости времени задержки корреляционного максимума свертки  одной из приемных антенн определяют азимутальное направление на транспортное средство как равное 90 градусам относительно центра данной приемной антенны и местонахождение транспортного средства на траверзе данной приемной антенны (т.е. текущая координата транспортного средства на оси х соответствует координате центра данной приемной антенны в выбранной системе отсчета).
одной из приемных антенн определяют азимутальное направление на транспортное средство как равное 90 градусам относительно центра данной приемной антенны и местонахождение транспортного средства на траверзе данной приемной антенны (т.е. текущая координата транспортного средства на оси х соответствует координате центра данной приемной антенны в выбранной системе отсчета).
Берут автокорреляционную функцию суммарного массива данных с обеих приемных антенн с последующим суммированием по всем элементам каждой из приемных антенн и определяют скорость транспортного средства как отношение расстояния между центрами приемных антенн к интервалу времени между характерными максимумами в автокорреляционной функции.
Для этого создают массив Gk,n(t)=g1,kn(t)+g2,kn(t) суммы отдельных участков полной реализации сигнала gkn=gkn(t) при n⋅τ≤t≤(n+1)⋅τ с обеих приемных антенн. Берут автокорреляционную функцию этого массива

для каждого акустического датчика k=1…K обеих приемных антенн и для временного интервала (n-1)τ≤t≤(n+1)τ.
Далее, чтобы повысить отношение сигнал/фон, функции Kk,n(t) суммируют по всем датчикам к обеих приемных антенн:  .
.
Автокорреляционный отклик  на n-м временном интервале будет содержать три характерных максимума (см. пример на фиг. 9), любые два соседних из которых разделены во времени на Т=L/V, где L - расстояние между центрами приемных антенн, а V - скорость транспортного средства на трассе. Отсюда, соответственно, вычисляется скорость транспортного средства.
на n-м временном интервале будет содержать три характерных максимума (см. пример на фиг. 9), любые два соседних из которых разделены во времени на Т=L/V, где L - расстояние между центрами приемных антенн, а V - скорость транспортного средства на трассе. Отсюда, соответственно, вычисляется скорость транспортного средства.
Этот вариант реализации способа на основе корреляционного подхода имеет преимущество по отношению к варианту реализации по п. 1 формулы тем, что на возможность его реализации накладываются значительно более мягкие ограничения за счет того, что вычислительные операции производят значительно быстрее по времени, поэтому для пространственного разрешения транспортных средств в потоке достаточно разнесения приемных антенн на расстояние, равное 2-3 линейным размерам самого транспортного средства. В нашем варианте способа по п. 2 расстояние L между центрами приемных антенн составляет 10-50 м. К характеристикам самой приемной антенны тоже не предъявляется таких жестких требований, как в случае способа по п. 1 формулы.
В итоге, и в реализации изобретения по п. 1 и в реализации изобретения по п. 2 осуществляется пассивное обнаружение транспортного средства по его собственному акустическому шуму, в том числе вне зависимости от погодных условий и времени суток осуществляется идентификация транспортного средства, определяются направление его движения и скорость, выявляется его локализация.
Реализация изобретения по п. 1 формулы позволяет выявлять локализацию транспортного средства в пространстве, т.е. определять азимутальное направление на транспортное средство и его координаты, практически в любой момент времени с момента начала приема полезного сигнала приемными антеннами, однако ввиду того, что вычислительная обработка принимаемого сигнала занимает значительное количество времени, определять скорость транспортного средства в данном варианте реализации способа удается только в апостериорном режиме (с отсрочкой по времени), кроме того, необходимо разнести приемные антенны на существенное расстояние друг от друга, чтобы гарантировать возможность осуществить необходимые вычисления за время проезда транспортного средства от одной приемной антенны до другой.
Реализация изобретения по п. 2 формулы позволяет фиксировать местоположение транспортного средства только в моменты прохождения им траверзов одной и другой приемных антенн, т.е. выявлять его локализацию с ограничениями, но позволяет очень быстро вычислять его скорость, и для осуществления данного варианта реализации способа достаточно разнести приемные антенны на расстояние, сравнимое с линейными размерами самого транспортного средства. Таким образом, оба варианта реализации изобретения выполняют поставленную задачу, но, в зависимости от условий наблюдения и приоритетности отдельных из задач обнаружения, можно пользоваться либо тем, либо другим.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2558017C1 |
| Способ обработки сигнала в скаттерометре Ku-диапазона космического базирования с вращающейся "веерной" диаграммой направленности | 2023 |
|
RU2832598C1 |
| МЕТОД ПАССИВНОГО АКУСТИЧЕСКОГО МОНИТОРИНГА ПРИДОННЫХ ГАЗОЖИДКОСТНЫХ ПОТОКОВ | 2013 |
|
RU2521717C1 |
| Способ обзора пространства | 2021 |
|
RU2765873C1 |
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| Способ пеленгации широкополосных сигналов с повышенной разрешающей способностью | 2019 |
|
RU2752878C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ИНФОРМАЦИОННЫХ ПРИЗНАКОВ | 2024 |
|
RU2828828C1 |
| СПОСОБ ТОМОГРАФИЧЕСКОЙ РЕГИСТРАЦИИ НАКЛОННОЙ ДАЛЬНОСТИ И АЗИМУТА ПОЛОЖЕНИЯ НАДВОДНЫХ ОБЪЕКТОВ И ОБЪЕКТОВ НАД ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТЬЮ | 2021 |
|
RU2760976C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
Изобретение относится к метрологии. Синхронно принимают сигнал на две антенны, оцифровывают и запоминают массивы информации. Разбивают сигнал на интервалы, осуществляют идентификацию по максимумам в амплитудном спектре. Затем осуществляют сканирование характеристики направленности приемной антенны, для каждого n-го временного интервала по суммарному сигналу с выхода каждой из двух приемных антенн, строят веерные диаграммы, определяют наличие транспорта по присутствию перепадов в веерных диаграммах, затем определяют азимутальное направление относительно центра антенны как средневзвешенное значение углов максимальных пиков в веерной диаграмме, по знаку разности значений углов принимают решение о направлении движения, вычисляют текущую координату, используя координаты для соседних интервалов определяют скорость движения. Во втором варианте реализации определяют направление движения и местоположение по знаку наклона зависимости времени задержки корреляционного максимума свертки массивов и по динамике ее наклона, вычисляют автокорреляционную функцию суммарного массива данных с последующим суммированием и определяют скорость транспортного средства как отношение расстояния между центрами антенн к времени между максимумами в автокорреляционной функции. Технический результат – обеспечение возможности одновременной идентификации, вычисления скорости и направления движения. 2 н.п. ф-лы, 9 ил., 1 табл.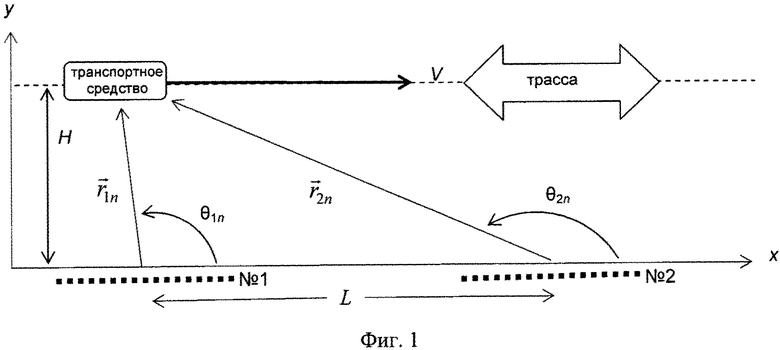
1. Пассивный способ обнаружения транспортного средства по его собственному акустическому шуму, в котором осуществляют регистрацию полезного сигнала, излучаемого в окружающую атмосферу транспортным средством, с помощью не менее чем одной приемной антенны, состоящей из размещенных в линию с постоянным шагом акустических датчиков, и определяют азимутальное направление на транспортное средство относительно центра приемной антенны, отличающийся тем, что начинают осуществлять регистрацию полезного сигнала при условии превышения им порогового уровня акустического фона окружающего пространства в спокойную погоду Р=60 дБ, а при условии превышения уровнем полезного сигнала порогового уровня акустического фона на 6 дБ в течение длительности полной реализации сигнала 10-20 с синхронно принимают полезный сигнал на две приемные антенны, каждая из которых состоит из K≥16 акустических датчиков, размещенных в линию вдоль трассы движения на известном расстоянии Н от нее с шагом d не более 1/4 длины звуковой волны λ используемого приемными антеннами участка в среднечастотном звуковом диапазоне 50-1000 Гц, причем Kd>>λ, а расстояние L между центрами приемных антенн составляет 50-200 м, оцифровывают принятый сигнал от каждой приемной антенны с частотой дискретизации  и размещают в памяти вычислительного устройства сигналы, принятые каждым k-м датчиком каждой приемной антенны, в виде k-го цифрового массива, для каждого датчика разбивают длительность полной реализации сигнала на N равных временных интервалов длительности τ, осуществляют идентификацию транспортного средства по наблюдаемому в его амплитудном спектре поведению максимумов в характерной для данного транспортного средства частотной полосе ΔF, создают два квадратурных канала по каждому k-му датчику каждой приемной антенны путем построения
и размещают в памяти вычислительного устройства сигналы, принятые каждым k-м датчиком каждой приемной антенны, в виде k-го цифрового массива, для каждого датчика разбивают длительность полной реализации сигнала на N равных временных интервалов длительности τ, осуществляют идентификацию транспортного средства по наблюдаемому в его амплитудном спектре поведению максимумов в характерной для данного транспортного средства частотной полосе ΔF, создают два квадратурных канала по каждому k-му датчику каждой приемной антенны путем построения  и
и  БПФ-спектров сигнала на каждом n-м временном интервале и формируют добавки к фазе спектральных компонент сигнала для последующего сканирования по углу максимума главного лепестка характеристики направленности приемной антенны
БПФ-спектров сигнала на каждом n-м временном интервале и формируют добавки к фазе спектральных компонент сигнала для последующего сканирования по углу максимума главного лепестка характеристики направленности приемной антенны  , где
, где  ,
,  ,
,  - шаг перестройки частоты, осуществляют перестройку в характерной для данного транспортного средства частотной полосе ΔF, и в ней же производят обратное БПФ-преобразование для получения суммарного сигнала с выхода каждой из двух приемных антенн на n-м временном интервале, для каждого n-го временного интервала по суммарному сигналу с выхода каждой из двух приемных антенн в полярных координатах строят веерные диаграммы, характеризующие азимутальное распределение максимумов модуля амплитудного отклика приемной антенны на собственный акустический шум транспортного средства, и убеждаются в наличии транспортного средства на трассе по присутствию в веерных диаграммах пиков с перепадом от максимума до ближайшего минимума не менее 15 дБ, затем определяют азимутальное направление на транспортное средство относительно центра каждой приемной антенны в текущем n-м временном интервале как средневзвешенное значение углов максимальных пиков в веерной диаграмме, по знаку разности средневзвешенных значений углов максимальных пиков в веерной диаграмме для двух следующих друг за другом n-го и n+1-го временных интервалов любой из приемных антенн принимают решение о направлении движения транспортного средства по трассе, текущую координату xn транспортного средства на трассе определяют как точку пересечения линий
- шаг перестройки частоты, осуществляют перестройку в характерной для данного транспортного средства частотной полосе ΔF, и в ней же производят обратное БПФ-преобразование для получения суммарного сигнала с выхода каждой из двух приемных антенн на n-м временном интервале, для каждого n-го временного интервала по суммарному сигналу с выхода каждой из двух приемных антенн в полярных координатах строят веерные диаграммы, характеризующие азимутальное распределение максимумов модуля амплитудного отклика приемной антенны на собственный акустический шум транспортного средства, и убеждаются в наличии транспортного средства на трассе по присутствию в веерных диаграммах пиков с перепадом от максимума до ближайшего минимума не менее 15 дБ, затем определяют азимутальное направление на транспортное средство относительно центра каждой приемной антенны в текущем n-м временном интервале как средневзвешенное значение углов максимальных пиков в веерной диаграмме, по знаку разности средневзвешенных значений углов максимальных пиков в веерной диаграмме для двух следующих друг за другом n-го и n+1-го временных интервалов любой из приемных антенн принимают решение о направлении движения транспортного средства по трассе, текущую координату xn транспортного средства на трассе определяют как точку пересечения линий  и
и  , идущих из центров приемных антенн по направлениям средневзвешенных значений углов максимальных пиков в веерных диаграммах обеих приемных антенн для n-го временного интервала, используя координаты транспортного средства в соседние n-й и n+1-й временные интервалы xn и xn+1 определяют скорость его движения V=(xn+1-xn)/τ.
, идущих из центров приемных антенн по направлениям средневзвешенных значений углов максимальных пиков в веерных диаграммах обеих приемных антенн для n-го временного интервала, используя координаты транспортного средства в соседние n-й и n+1-й временные интервалы xn и xn+1 определяют скорость его движения V=(xn+1-xn)/τ.
2. Пассивный способ обнаружения транспортного средства по его собственному акустическому шуму, в котором осуществляют регистрацию полезного сигнала, излучаемого в окружающую атмосферу транспортным средством, с помощью не менее чем одной приемной антенны, состоящей из размещенных в линию с постоянным шагом акустических датчиков, и определяют азимутальное направление на транспортное средство относительно центра приемной антенны, отличающийся тем, начинают осуществлять регистрацию полезного сигнала при условии превышения им порогового уровня акустического фона окружающего пространства в спокойную погоду Р=60 дБ, а при условии превышения уровнем полезного сигнала порогового уровня акустического фона на 6 дБ в течение длительности полной реализации сигнала 10-20 с синхронно принимают полезный сигнал на две приемные антенны, каждая из которых состоит из K≥16 акустических датчиков, размещенных в линию вдоль трассы движения на известном расстоянии Н от нее с шагом d не более 1/4 длины звуковой волны λ используемого приемными антеннами участка в среднечастотном звуковом диапазоне 50-1000 Гц, причем расстояние L между центрами приемных антенн составляет 10-50 м, оцифровывают принятый сигнал от каждой приемной антенны с частотой дискретизации и размещают в памяти вычислительного устройства сигналы, зарегистрированные каждым k-м датчиком каждой приемной антенны, в виде k-го цифрового массива, для каждого датчика разбивают длительность полной реализации сигнала на N равных временных интервалов длительности τ, осуществляют идентификацию транспортного средства по наблюдаемому в его амплитудном спектре поведению максимумов в характерной для данного транспортного средства частотной полосе ΔF, определяют направление движения транспортного средства и его местоположение относительно приемной антенны по знаку наклона зависимости времени задержки корреляционного максимума свертки массивов, соответствующих отдельным участкам полной реализации сигнала gkn=gkn(t), со все более разносимых пар датчиков в одной приемной антенне, и по динамике ее наклона при переходе от текущего n-го к последующему n+1-му временному интервалу, определяют азимутальное направление на транспортное средство относительно центра одной из приемных антенн как равное 90° и фиксируют местонахождение транспортного средства на траверзе данной приемной антенны в момент обращения в нуль угла наклона зависимости времени задержки корреляционного максимума свертки, берут автокорреляционную функцию суммарного массива данных с обеих приемных антенн с последующим суммированием по всем элементам каждой из приемных антенн и определяют скорость транспортного средства как отношение расстояния между центрами приемных антенн к интервалу времени между характерными максимумами в автокорреляционной функции.
| Ю.М | |||
| Заславский, В.Ю | |||
| Заславский, А.М | |||
| Соков | |||
| О ПРИМЕНЕНИИ СКАНИРУЕМОЙ ВОЗДУШНО-АКУСТИЧЕСКОЙ АНТЕННЫ ДЛЯ ПЕЛЕНГА ГОРОДСКОГО ТРАНСПОРТА // Доклады XV школы-семинара им | |||
| акад | |||
| Л.М | |||
| Бреховских "Акустика океана", совмещенной с XXIX сессией Российского Акустического Общества | |||
| М.: ГЕОС, 26.04.2016 (стр | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
| Ю.М | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
| 0 |
|
SU157396A1 | |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2316788C9 |
| US 20090115635 A1, 07.05.2009 | |||
| US 6195608 B1, 27.02.2001 | |||
| ПЛАСТИНА-СКРЕБОК ДЛЯ ИНСТРУМЕНТА, ТАКОГО, КАК ВАЛИК | 1994 |
|
RU2114744C1 |
| СИСТЕМА МОНТАЖА БАНКОВСКОГО УСТРОЙСТВА САМООБСЛУЖИВАНИЯ В ПАВИЛЬОНЕ ДЛЯ ОКАЗАНИЯ БАНКОВСКИХ УСЛУГ | 2012 |
|
RU2516314C2 |

