Группа изобретений относится к области электротехники и может быть использована при создании двигателей (генераторов) с постоянными магнитами.
В работе (см. Лифанов В.А. Расчет электрических машин малой мощности с возбуждением от постоянных магнитов. Учебное пособие. Челябинск. Издательский центр ЮУрГУ, 2010 г.) на рис. 1.3, 1.4 рассмотрены типовые конструкции электрических машин с постоянными магнитами. В вентильных двигателях постоянного тока и синхронных микродвигателях преимущественное применение получили магнитопроводы с внешним расположением якоря и вращающимся индуктором, но возможны варианты с внешним вращающимся индуктором и неподвижным внутренним якорем (см. рис. 1.3в). Магниты могут иметь кольцевую, цилиндрическую или призматическую форму. Индуктор может быть монолитным (см. рис. 1.4в) или составным (см. рис. 1.4г), может иметь явно выраженные полюсы или иметь кольцевую форму без явных полюсов. Такое многообразие вариантов конструкции объясняется различием технических требований, а также отсутствием единого критерия оптимизации электрических машин.
В работе (см. Бут Д.А. Бесконтактные электрические машины. Москва Высшая школа 1990 г.) на рис. 2. 22 изображены варианты конструкции роторов синхронных машин с постоянными магнитами призматического вида. Рассмотрены две модификации роторов, с радиальным и тангенциальным намагничиванием магнитов. В первом случае ротор содержит расположенные радиально постоянные магниты призматической формы, которые намагничены по радиусу и примыкают своими внутренними торцами к магнитной втулке (внутреннему магнитопроводу). Во втором случае магниты намагничены тангенциально и примыкают к немагнитной втулке. Роль полюсов в этом случае выполняют секторы из магнитомягкой стали, которые расположены между магнитами.
Примером применения постоянных магнитов является электрическая машина в режиме вентильного двигателя.
Типовая структура вентильного двигателя с внутренним ротором (см. Овчинников И.Е. Вентильные двигатели и привод на их основе. Курс лекций. Санкт-Петербург, Корона-Век. 2012 рис. 1.5б) содержит статор с обмоткой, состоящей из двенадцати секций, образующих замкнутую систему. Точки соединения секций подключены к бесконтактным (транзисторным) переключателям. Каждый из переключателей управляется своим чувствительным элементом (датчиком), закрепленным на статоре. Датчики срабатывают от намагниченных секторов ротора. На роторе расположены также постоянные магниты системы возбуждения.
В данном устройстве совмещены преимущества коллекторного двигателя постоянного тока и синхронного двигателя с возбуждением от постоянных магнитов, таких как:
- отсутствие скользящих электрических контактов, высокая надежность и долговечность;
- благоприятные механические и регулировочные характеристики, простота управления моментом вращения и скоростью;
- высокая кратность пускового момента, малая механическая постоянная времени, хорошая динамика;
- улучшенные энергетические показатели, благодаря применению современных магнитов;
- высокие удельные показатели по развиваемому длительному моменту на единицу массы двигателя.
В другой работе (см. Захаренко А.Б. Создание высокомоментных электрических машин с постоянными магнитами. Автореферат диссертации на соискание ученой степени доктора технических наук. На правах рукописи. М. 2008 г. www.vniiem.ru/ru/uploads/files/zakharenko.pdf) на рис. 1 изображена активная часть электрической машины с двумя рабочими зазорами. На рис. 2 изображена активная часть электрической машины с постоянными магнитами с одним зазором между статором и ротором. Главной отличительной особенностью рассматриваемых исполнений электрических машин является то, что обмотка их статора - катушечная (зубцовая), и каждая катушка обмотки статора расположена отдельном зубце (рис. 2). Благодаря радиальному расположению постоянных магнитов эти конструктивные исполнения обладают преимуществами над другими исполнениями высокомоментных машин:
- упрощается технология изготовления обмотки;
- повышается коэффициент заполнения паза;
- улучшается теплопроводность обмотки;
- уменьшается удельный вес высших гармонических составляющих в составе ЭДС;
- снижаются пульсации момента, увеличивается плавность движения;
- увеличивается КПД.
В режиме вентильного двигателя датчики положения ротора размещены на стороне статора, обращенной к постоянным магнитам ротора, непосредственно во внешнем воздушном зазоре.
Это дает возможность:
- упростить конструкцию за счет отказа от дополнительных магнитных систем;
- более точно обеспечить моменты переключения фаз;
- получить более высокую стабильность работы датчиков;
- упростить контрольные операции при производстве и диагностике.
В данной работе также установлено, что общепризнанного критерия оптимизации электрических машин с постоянными магнитами не существует, поэтому задачу оптимизации необходимо рассматривать как многокритериальную.
Известна синхронная машина (см. патент РФ 2069441 Н02К 21/22 1996), содержащая якорь, имеющий N полюсов и индуктор из множества постоянных магнитов. Указанные постоянные магниты, имеющие N-1 полюсов, обеспечивают магнитное поле при вращении относительно якоря. Такие машины могут производить электрическую энергию в режиме генератора или создавать крутящий момент в режиме двигателя. Поле возбуждения в них образовано постоянными магнитами, вращающимися относительно якоря с явными полюсами.
На фиг. 2 и фиг. 3 изображен конкретный пример якоря (статора) с катушечной (зубцовой) обмоткой, где каждая катушка обмотки расположена на отдельном зубце. На фиг. 6 изображена схема устройства преобразования переменного (генерируемого) напряжения в постоянное в режиме генератора, содержащая группу выпрямительных диодов и нагрузку. Данное устройство позволяет повысить КПД путем сглаживания кривой момента вращения.
Перспективным направлением в разработке электрических машин является применение магнитных сборок Халбаха (см. https://ru.wikipedia.org/wiki/Магнитная_сборка_Халбаха).
Различают три вида магнитных сборок Халбаха (массивов Халбаха):
- линейная магнитная сборка Халбаха; - цилиндр Халбаха; - сфера Халбаха.
В линейной сборке Халбаха магнитное поле усиливается с одной стороны примерно в два раза (зона максимальной индукции) и ослабляется с противоположной стороны (зона минимальной индукции) практически до нуля, благодаря особому расположению элементов сборки. Зоной максимальной (минимальной) индукции будем называть часть пространства (физический объем с магнитным полем), расположенный по сторонам сборки. Форма этого объема вблизи сборки (в рабочем зазоре) похожа на параллелепипед, толщина которого не менее ширины рабочего зазора, а длина и ширина примерно соответствуют размерам магнитной сборки.
Конфигурация магнитного поля вокруг сборки имеет явно несимметричный характер (см. фиг. 2). Направление расположения зоны (объема) максимальной (минимальной) индукции будем определять не прямой линией, а некоторым конусом (сектором), внутри которого практически сохраняется физическое воздействие на ротор электрической машины, т.е. практически сохраняется момент вращения. Центральный угол этого сектора не превышает нескольких градусов.
В дальнейшем, для простоты, будем условно совмещать направление расположения зоны максимальной (минимальной) индукции с направлением одной из осей сборки, которые можно провести для ориентации линейной магнитной сборки в пространстве. Можно провести три взаимно перпендикулярные оси, проходящие через центр сборки. Большая ось будет проходить вдоль длинной стороны магнитной сборки и будет условно параллельна зоне максимальной (минимальной) индукции, первая малая ось также будет условно параллельна зоне максимальной (минимальной) индукции, а вторая малая ось будет условно перпендикулярна зоне максимальной (минимальной) индукции (с точностью до нескольких градусов).
В цилиндре Халбаха внутреннее магнитное поле имеет однородную структуру, и постоянно по величине, что можно использовать при проектировании электрических машин. Однако, линейная магнитная сборка Халбаха проще по своей конструкции. Она состоит из магнитов в форме параллелепипедов, в т.ч. и из магнитов кубической формы. Количество магнитов в сборке не менее трех. Магнитные элементы цилиндра Халбаха имеют достаточно сложную форму и индивидуальные (разные) направления намагниченности, что существенно удорожает их производство.
Сфера Халбаха имеет замкнутую поверхность (объем), поэтому ее применение в электрических машинах нецелесообразно.
В следующей статье (Исмагилов Ф.Р. и др. Исследование новых конструкций индукторов магнитоэлектрических машин. Научный журнал "Успехи современного естествознания" РАЕ №12 2007 часть 3 стр. 119-120 www.rae.ru) рассмотрены результаты моделирования программными средствами магнитной системы на основе цилиндра Халбаха. Была проанализирована конструкция магнитной системы, состоящей из восьми сегментов, объединенных в окружность, с постоянным изменением направления их намагниченности. В результате расчетов был сделан вывод, что рассмотренная магнитная система может быть использована как двухполюсный индуктор в синхронных машинах и машинах постоянного тока. Поле внутри данной магнитной системы можно приближенно определить по формуле:

где
Br - остаточная индукция;
r1 - внутренний радиус;
r2 - внешний радиус.
Оценим величину В0. При изменении значения отношения  от 1,5 до 3 значение ln≤1,1. Отсюда следует, что значение В0≤Br.
от 1,5 до 3 значение ln≤1,1. Отсюда следует, что значение В0≤Br.
Фактически не происходит усиления магнитного поля вблизи магнитов, но с другой стороны это поле очень однородное и постоянное по величине внутри всего цилиндра Халбаха.
Основные преимущества подобных конструкций - малая масса и инерция, отсутствие потерь в стали. При этом конструкция машины упрощается, появляется возможность извлечения большой пиковой мощности за короткое время.
Недостатком такой системы является сложная форма магнитных сегментов, образующих цилиндр Халбаха и трудность их намагничивания в заданных направлениях.
В дополнение к предыдущему в статье (Halbach Array Motor/Generators - A Novel Generalizet Electric Machine 1994 www.hkcm.de/download/Haibach_Array_Motor.pdf) рассмотрена обобщенная электрическая машина на основе массива Халбаха. На фиг. 1а изображен исследуемый цилиндр Халбаха (вид сверху), состоящий из восьми магнитных сегментов. Показано направление намагниченности каждого сегмента. На фигуре 1в изображены магнитные силовые линии части цилиндра. На фигуре 2 изображены магнитные силовые линии внутри цилиндра и измеренные значения магнитной индукции в разных точках цилиндра. Магнитное поле вне цилиндра значительно ослаблено, а поле внутри цилиндра постоянно по величине и по направлению. Такие массивы Халбаха перспективны для создания двигателей - генераторов, хотя имеют недостатки, связанные со сложностью изготовления самого массива.
Известен двигатель на основе цилиндра Халбаха (High Efficiency Permanent Magnet Motor www.ata.org.au/wp-content/uploads/marand_high_efficiency_motor.pdf), содержащий распределенную обмотку статора, датчики положения и два кольцеобразных ротора с постоянными магнитами. Данный двигатель имеет повышенный КПД, повышенную мощность и уменьшенную массу.
Известно использование линейных магнитных сборок Халбаха для транспортных средств на магнитной подушке (Toward More Efficient Transport: The Inductrack Maglev System 10 oktober 2005 http:/gcep.Stanford.edu/pdfs/ChEHeXOTnf3dHH5gjYRXMA/09_Post_10_11_trans.pdf).
Ha GCEP_16 изображена схема магнитной подвески для скоростного поезда на магнитной подушке. Элемент магнитной подвески состоит из двух линейных магнитных сборок Халбаха, каждая из которых содержит по пять постоянных прямоугольных магнитов, намагниченных под углом 90° друг к другу. Первая (верхняя) сборка находится выше полотна (трассы), а вторая (нижняя) сборка находится ниже трассы (стального полотна). Зоны максимальной индукции каждой сборки находятся в рабочих зазорах между полотном и плоскостью магнитной сборки. Благодаря увеличенной магнитной индукции в рабочем зазоре возникает большая подъемная сила. Транспортное средство не касается полотна, а парит над ним. Такой процесс называется левитацией.
На GCEP - 05, 06, 17 изображены поезда на магнитной подушке, реализованной на линейных магнитных сборках Халбаха. Такие поезда достигают скорости  имеют плавный ход, низкий уровень шума и высокую энергоэффективность.
имеют плавный ход, низкий уровень шума и высокую энергоэффективность.
Известна электрическая машина (патент РФ 2141716 Н02К 29/00 1999). содержащая статор с системой проводников и ротор с системой возбуждения из постоянных магнитов. В режиме двигателя электрическая машина имеет также сенсорное устройство, укрепленное на наружном периметре статора и управляющее устройство, которое осуществляет переполюсовку (переключение) постоянного питания проводниковой системы. В режиме генератора электрическая машина содержит устройство выпрямления (преобразования) получаемого в генераторе тока.
Постоянные магниты имеют треугольную форму и расположены по кольцу. Кроме того постоянные магниты с обеих сторон имеют выступы, с помощью которых они входят в зацепление в соответствующие пазы зон материала, который заполняет пространство между магнитами (прототип).
Данная электрическая машина имеет повышенный вращающий момент и мощность относительно своего веса или занимаемого объема.
Недостатками данного устройства являются сложная форма постоянных магнитов, что повышает трудоемкость изготовления, а также недостаточная величина момента вращения, ввиду применения одиночных постоянных магнитов.
Сущность группы изобретений заключается в следующем.
Единая задача, на решение которой направлена заявляемая группа изобретений заключается в использовании линейных магнитных сборок Халбаха в электрических машинах.
Единый технический результат, который может быть получен при осуществлении данной группы изобретений заключается в повышении вращающего момента (мощности) в режиме двигателя и отдаваемой мощности в режиме генератора.
Технический результат заключается также в упрощении конструкции по сравнению с машинами, использующими цилиндр Халбаха.
Указанный технический результат при осуществлении группы изобретений достигается тем, что в известной электрической машине, содержащей статор, ротор, устройство переключения в режиме двигателя и устройство преобразования напряжения в режиме генератора, ротор содержит группу линейных магнитных сборок Халбаха, зоны максимальной индукции которых расположены перпендикулярно к плоскости движения ротора.
Группа линейных магнитных сборок Халбаха с магнитопроводом расположены во внутреннем роторе, а внешний статор содержит магнитопровод с обмоткой.
Группа линейных магнитных сборок Халбаха с магнитопроводом расположены во внешнем роторе, а внутренний статор содержит магнитопровод с обмоткой.
В частном случае, при стремлении значения радиуса вращения ротора к бесконечности, данное устройство преобразуется в линейную электрическую машину, в которой функции ротора или статора может выполнять как группа линейных магнитных сборок Халбаха с магнитопроводом, так и, соответственно, магнитопровод с обмоткой.
Использование линейных магнитных сборок Халбаха в роторе электрической машины приводит к усилению магнитной индукции в рабочем зазоре, увеличению силы взаимодействия и увеличению вращающего момента и мощности электрической машины.
Указанный технический результат при осуществлении группы изобретений достигается тем, что в известной электрической машине, содержащей статор, ротор, устройство переключения в режиме двигателя и устройство преобразования напряжения в режиме генератора, ротор содержит группу линейных магнитных сборок Халбаха, зоны максимальной индукции которых расположены параллельно к плоскости движения ротора.
Вторая группа линейных магнитных сборок Халбаха расположена во втором роторе, который совместно со вторым статором является зеркальным отображением относительно плоскости основания магнитопровода ротора.
В частном случае, при стремлении значения радиуса вращения ротора к бесконечности, данное устройство преобразуется в линейную электрическую машину, в которой функции ротора или статора может выполнять как группа линейных магнитных сборок Халбаха с магнитопроводом, так и, соответственно, магнитопровод с обмоткой.
Использование линейных магнитных сборок Халбаха в электрических машинах позволит улучшить их энергетические показатели, в частности, увеличить момент вращения и отдаваемую мощность.
Заявленная группа изобретений соответствует требованию единства изобретения, поскольку группа однообъектных изобретений образует единый изобретательский замысел.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации позволил установить, что заявитель не обнаружил аналоги, характеризующиеся признаками тождественными всем существенным признакам для каждого из заявленных объектов группы, изложенных в формуле изобретения.
Следовательно, каждый из объектов группы изобретений соответствует условию "новизна". Каждый объект заявляемой группы изобретений не вытекает для специалиста явным образом из известного уровня техники, поскольку в каждом объекте не происходит простая замена постоянных магнитов на линейные магнитные сборки Халбаха.
Линейные магнитные сборки Халбаха характеризуются совершенно другой конфигурацией магнитного поля по сравнению с одиночными магнитами. Она имеет явно несимметричную форму распределения магнитных силовых линий. Коэффициент несимметрии, т.е. отношение величин магнитных индукций с разных сторон сборки, может достигать десятков единиц. Сборка имеет также другую геометрическую форму и размеры по сравнению с одиночными магнитами. Все это приводит к совершенно другой конфигурации результирующего поля ротора и статора, что в свою очередь, влияет на конструкцию элементов устройства и их взаимное расположение. Решение такой задачи требует больших творческих усилий и интеллектуального труда.
Следовательно, каждый из объектов заявленной группы изобретений соответствует условию "изобретательский уровень ".
На чертежах и рисунках представлены варианты выполнения электрической машины, а также варианты выполнения ее отдельных блоков и узлов.
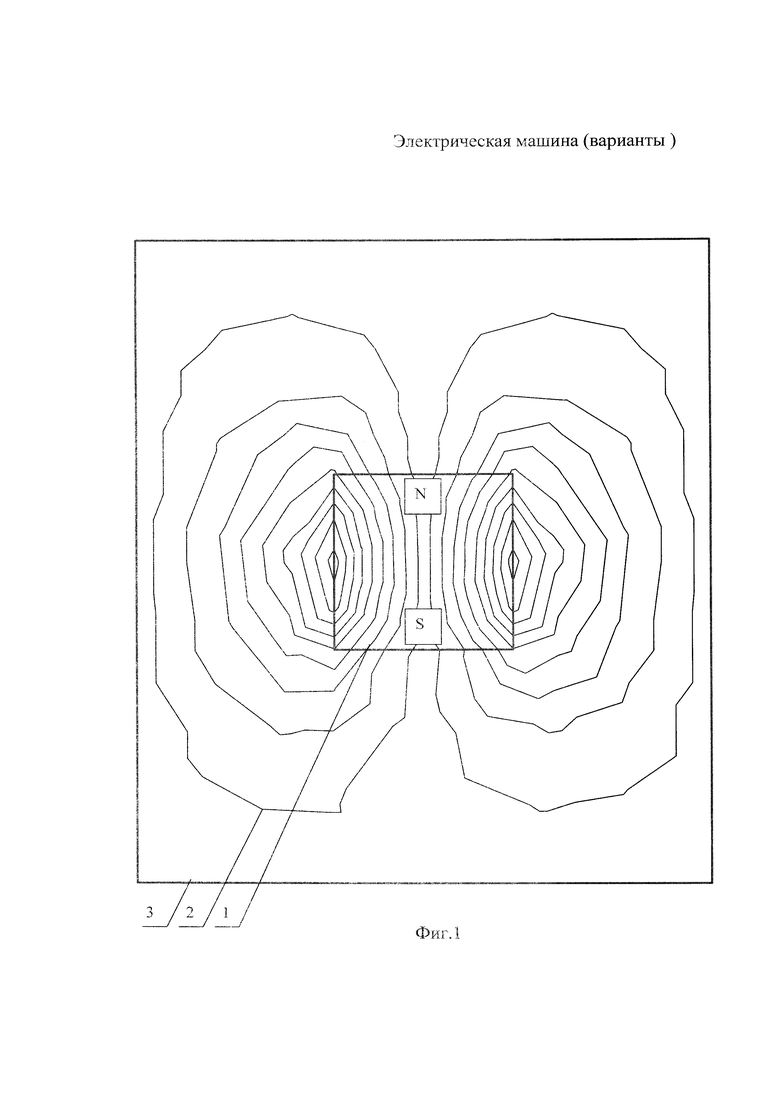
На фиг. 1 изображены магнитные силовые линии постоянного магнита;
На фиг. 2 изображены магнитные силовые линии линейной магнитной сборки Халбаха, состоящей из трех постоянных магнитов;
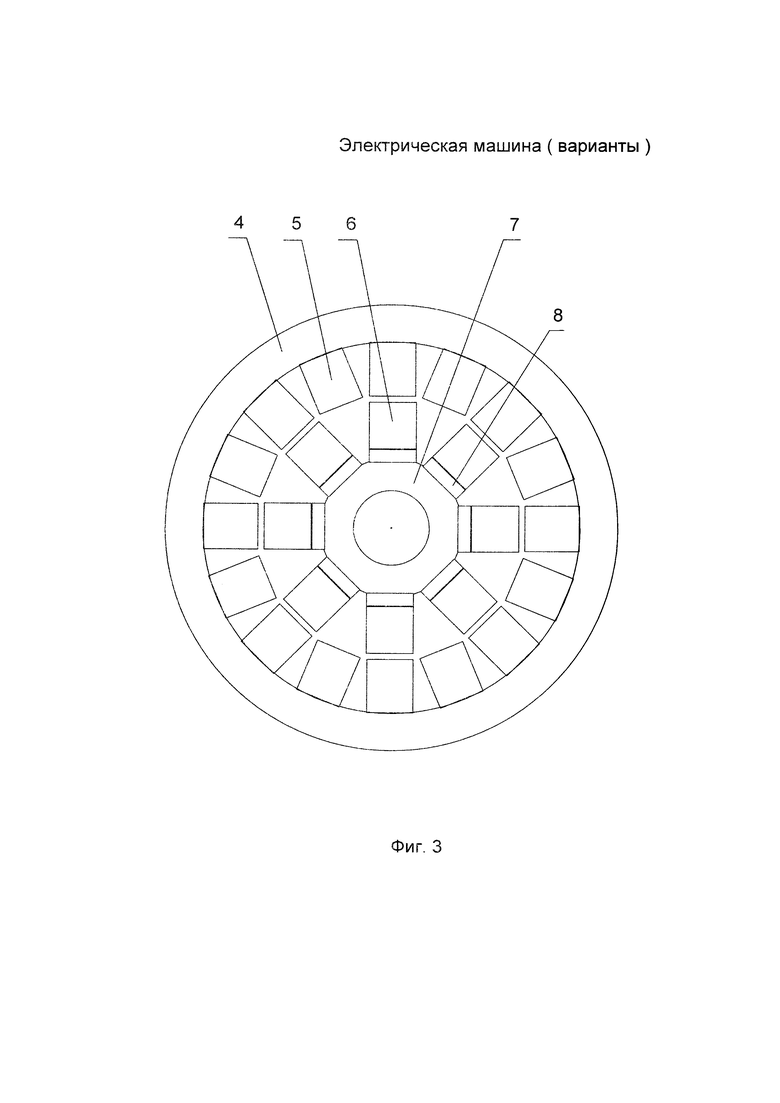
На фиг. 3 изображен вариант выполнения электрической машины с внутренним ротором, вид сверху. Большие оси сборок перпендикулярны к плоскости движения ротора.
На фиг. 4 изображен предыдущий вариант в аксонометрической проекции.
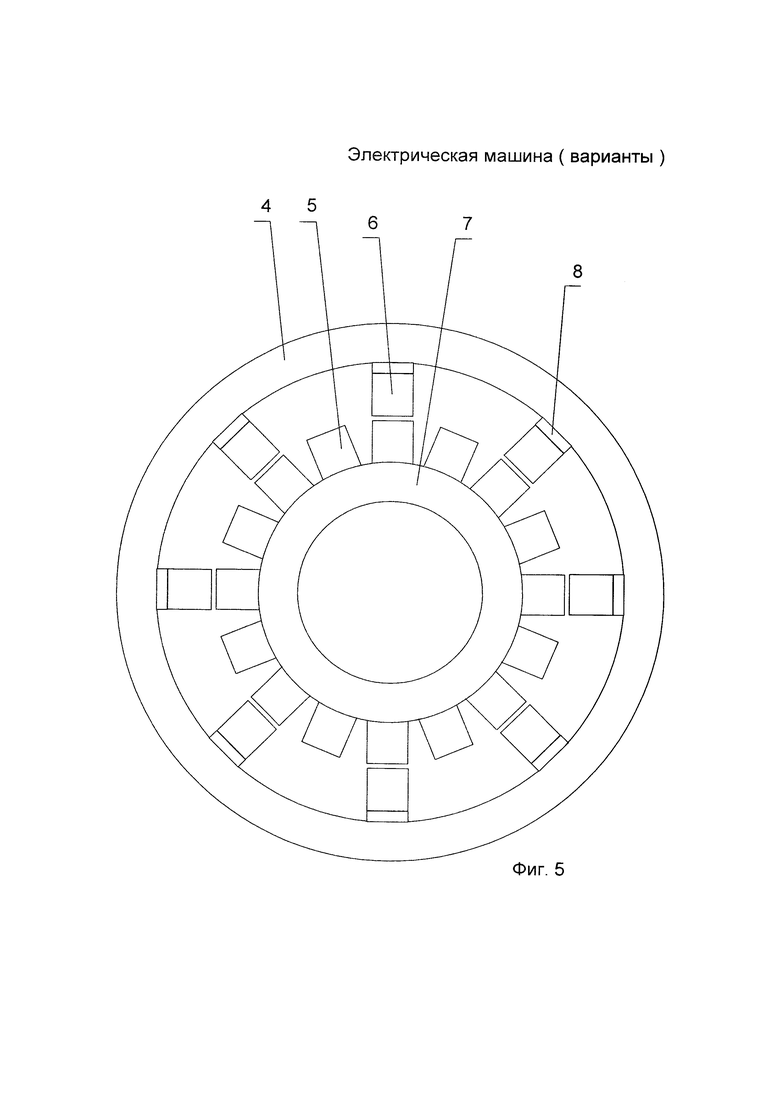
На фиг. 5 изображен вариант выполнения электрической машины с внешним ротором, вид сверху. Большие оси сборок перпендикулярны к плоскости движения ротора.
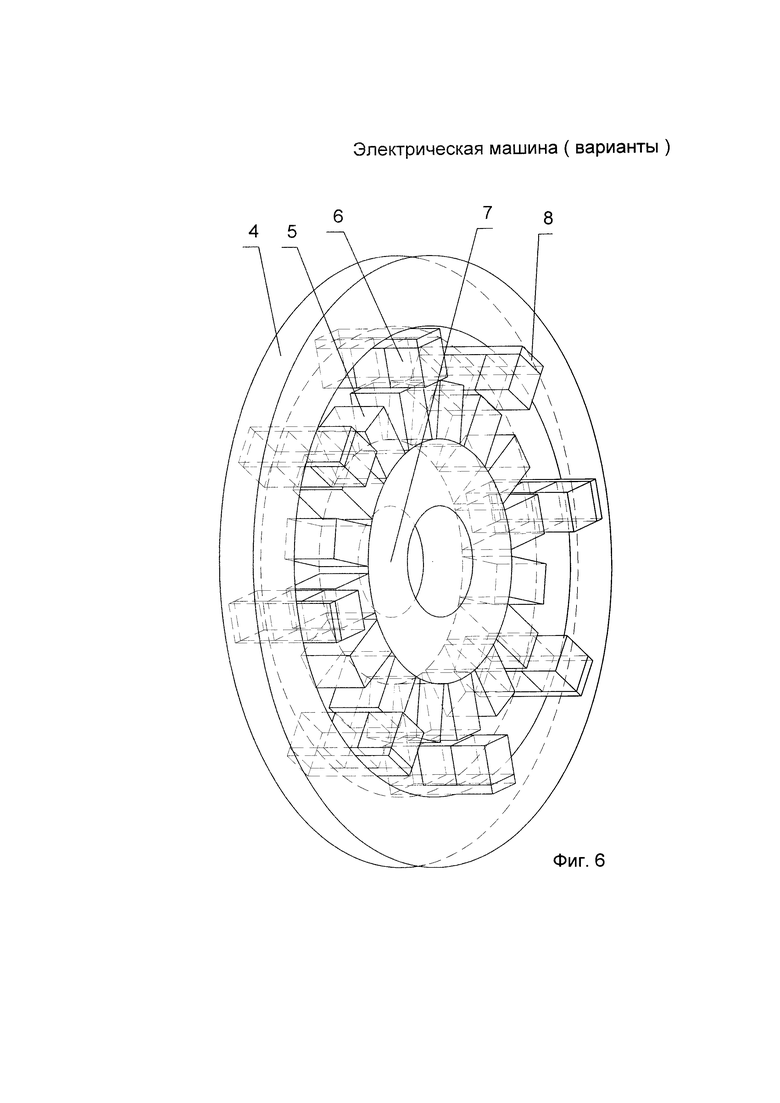
На фиг. 6 изображен предыдущий вариант в аксонометрической проекции.
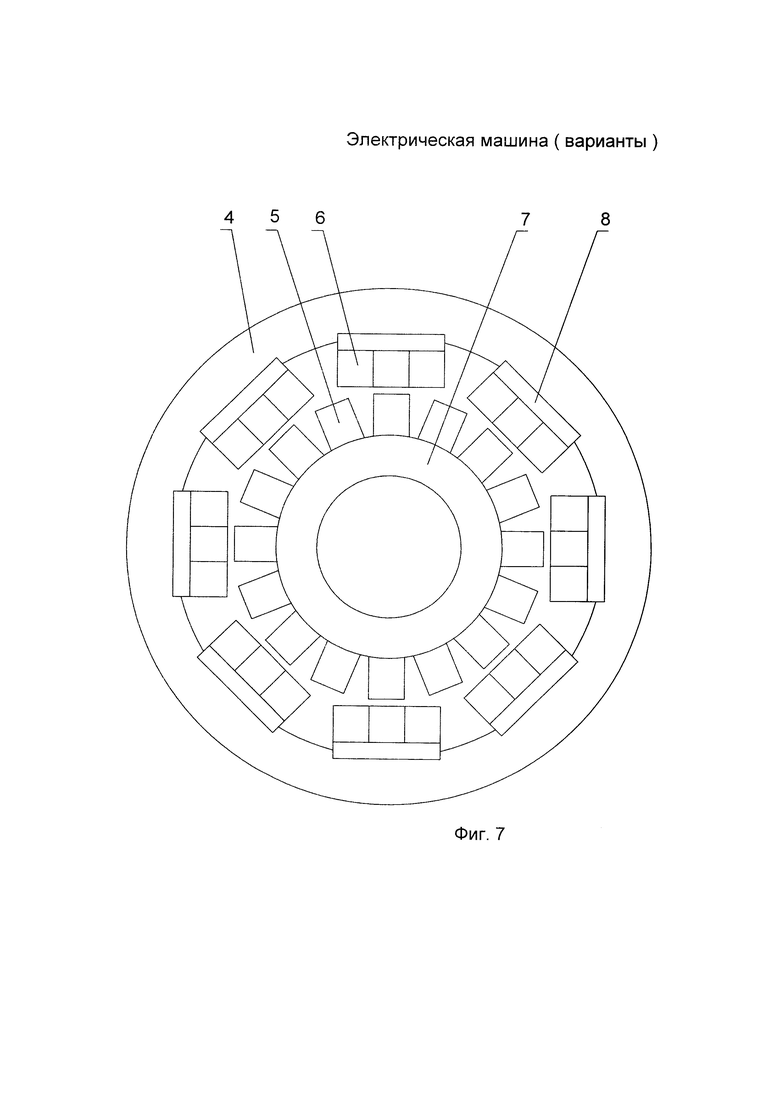
На фиг. 7 изображен вариант выполнения электрической машины с внешним ротором, вид сверху. Первые малые оси сборок перпендикулярны к плоскости движения ротора.
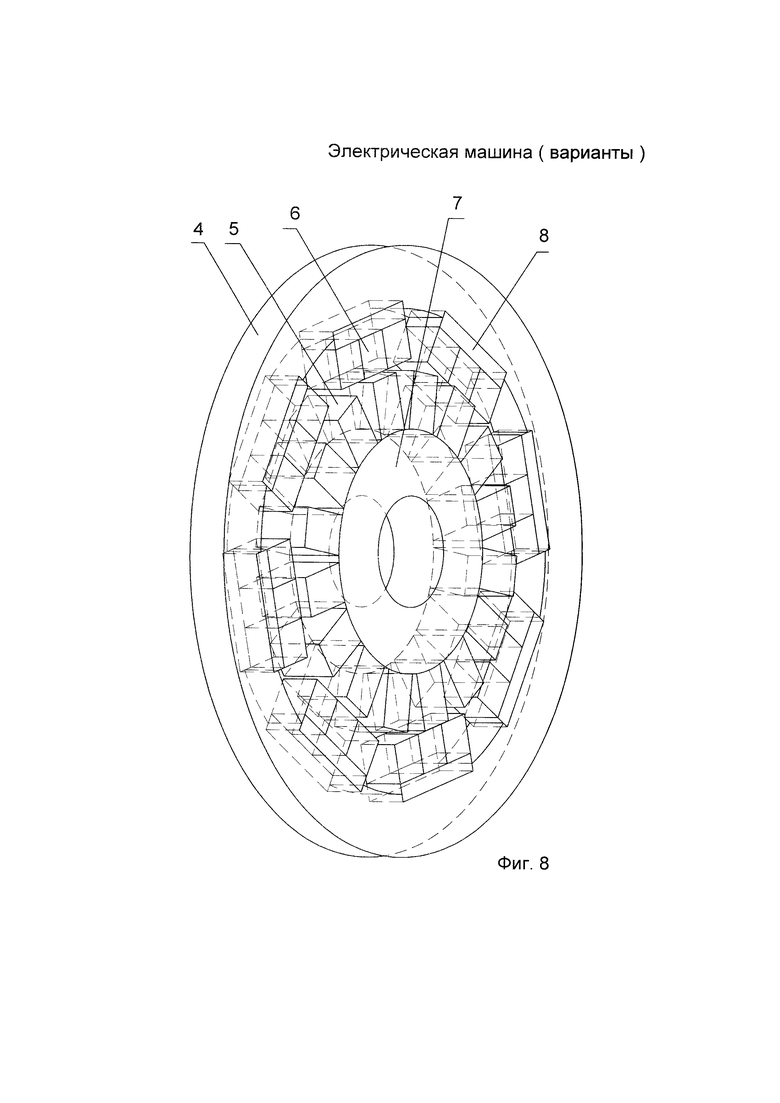
На фиг. 8 изображен предыдущий вариант в аксонометрической проекции.
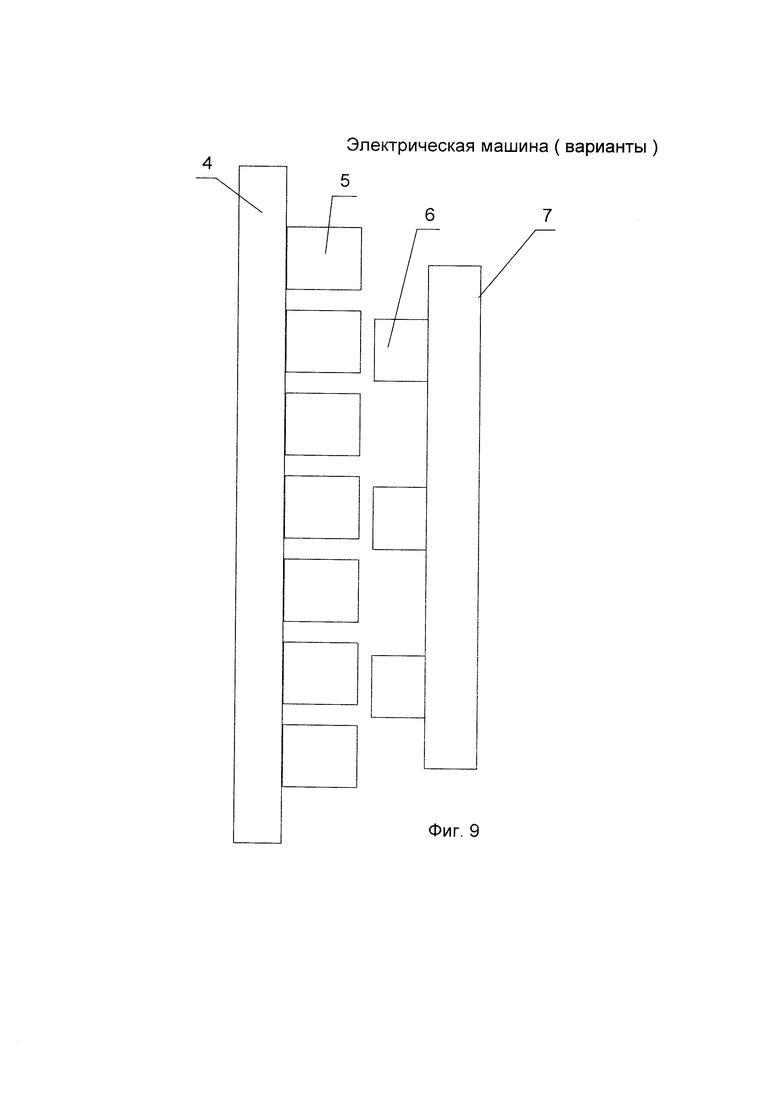
На фиг. 9 изображен вариант выполнения линейной электрической машины, вид сверху.
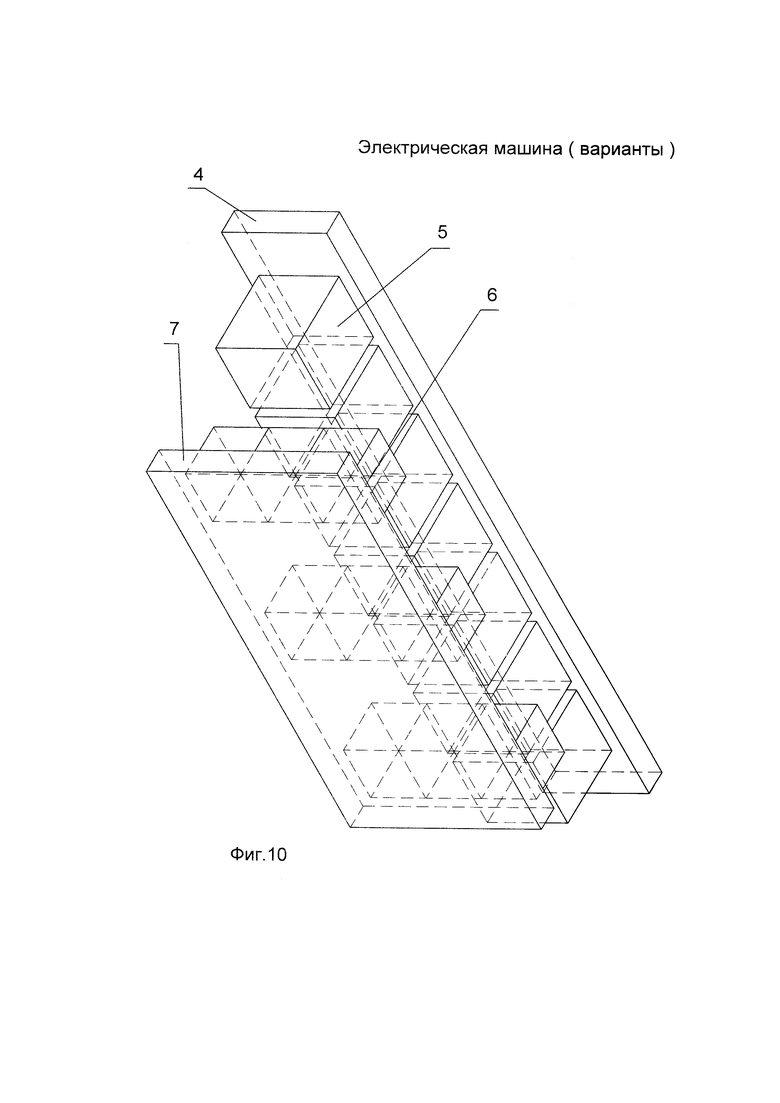
На фиг. 10 изображен предыдущий вариант в аксонометрической проекции.
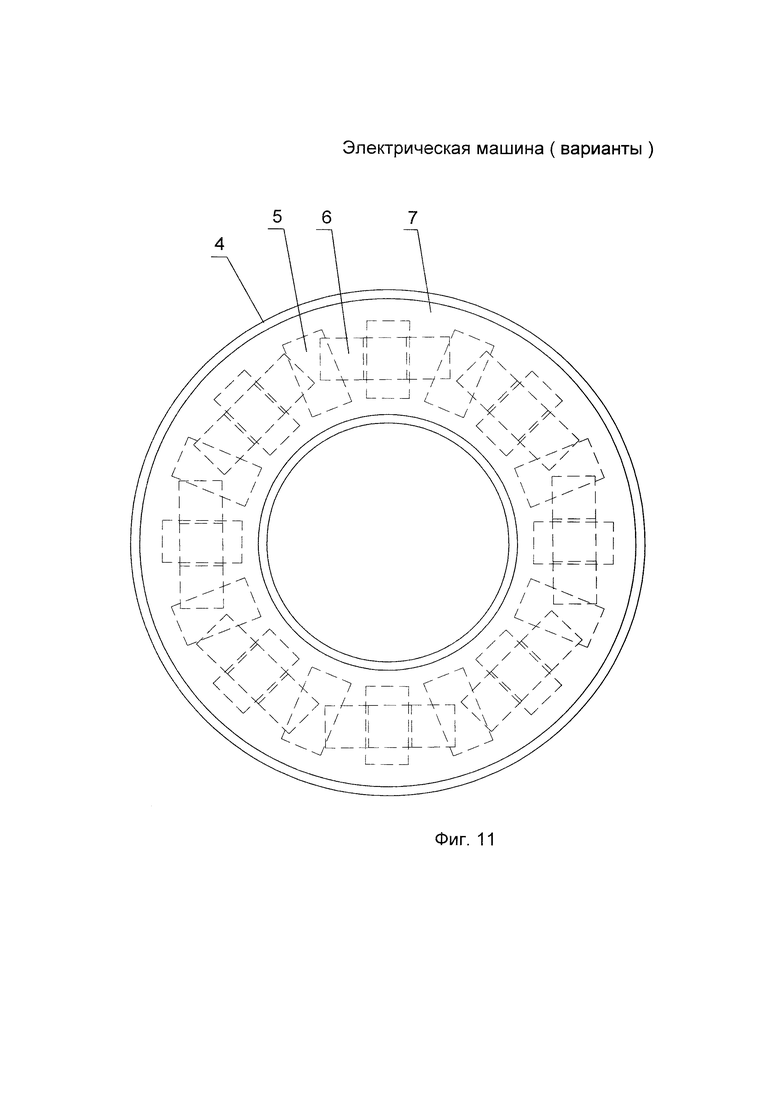
На фиг. 11 изображен вариант выполнения электрической машины с параллельным расположением зон максимальной индукции сборок к плоскости движения ротора, вид сверху. Большие оси сборок направлены перпендикулярно к радиусам вращения ротора.
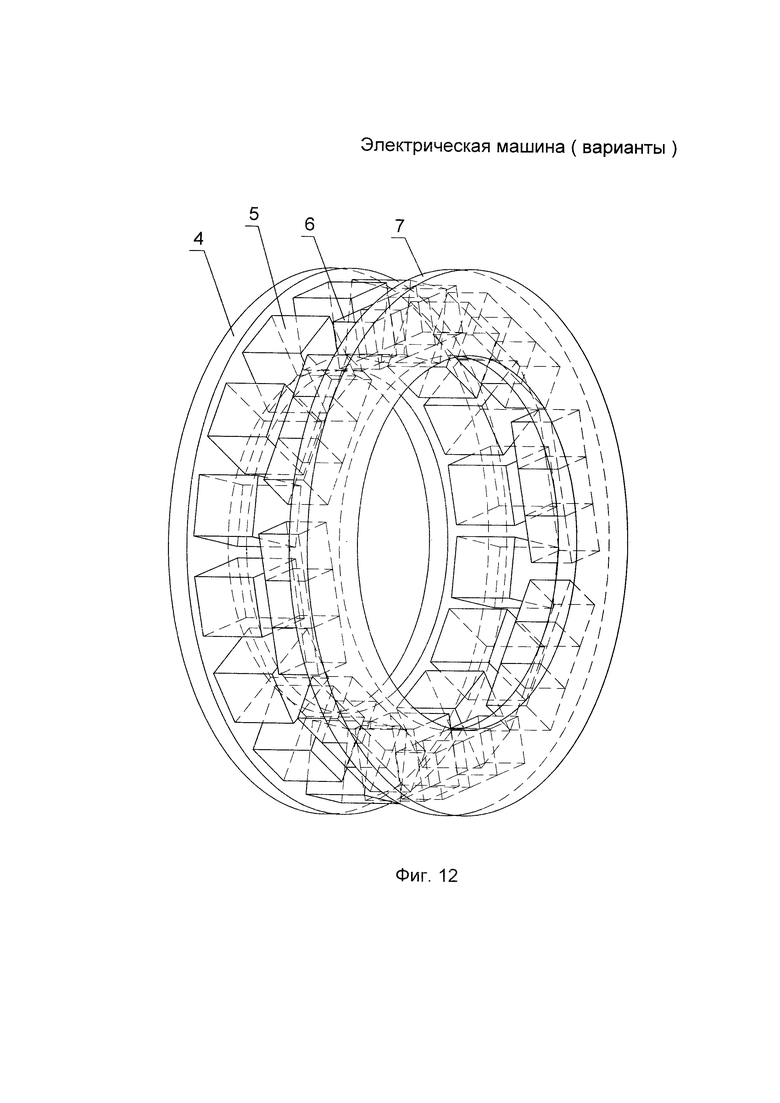
На фиг. 12 изображен предыдущий вариант в аксонометрической проекции.
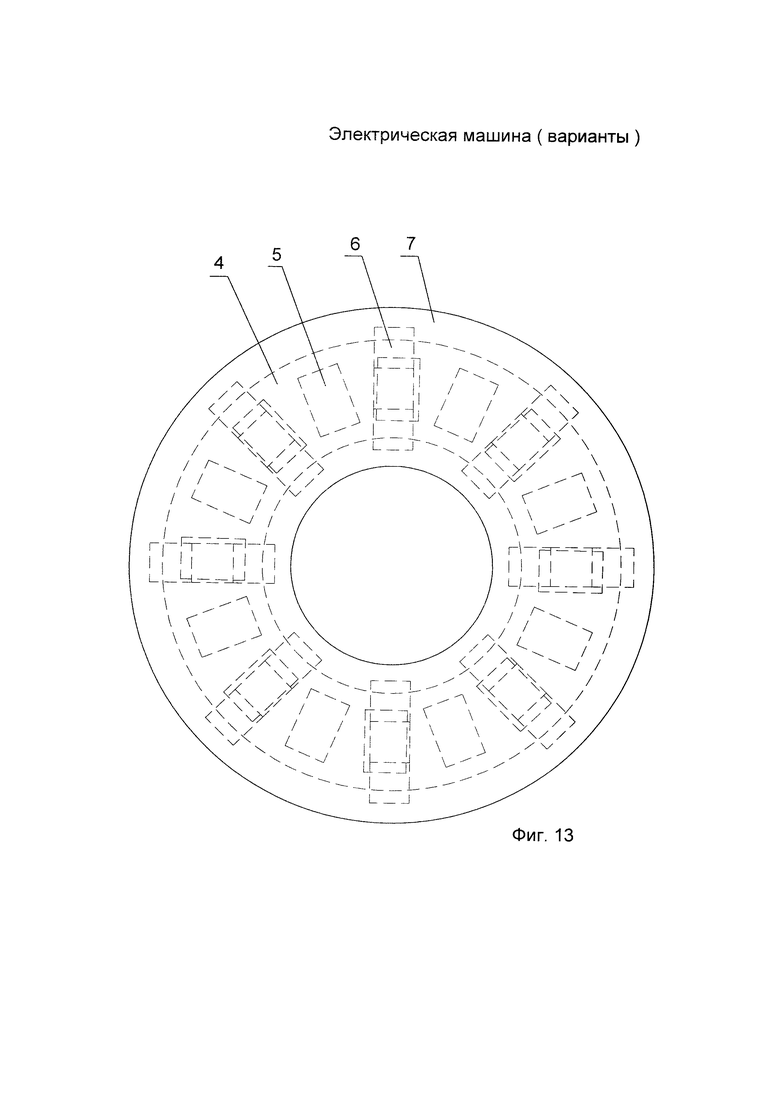
На фиг. 13 изображен вариант выполнения электрической машины с параллельным расположением зон максимальной индукции сборок к плоскости движения ротора, вид сверху. Большие оси сборок направлены параллельно к радиусам вращения ротора.
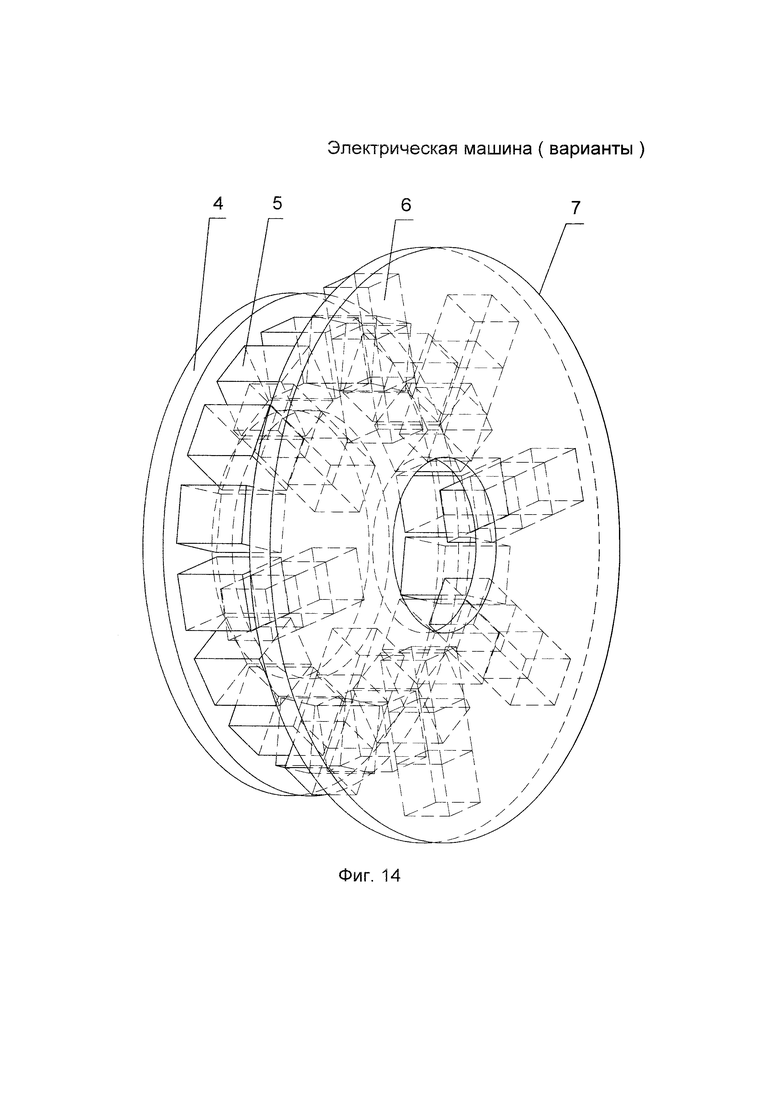
На фиг. 14 изображен предыдущий вариант в аксонометрической проекции.
На фиг. 15 изображен вариант выполнения электрической машины в аксонометрической проекции со вторым ротором и статором, зеркально отображенными относительно плоскости основания магнитопровода первого ротора.
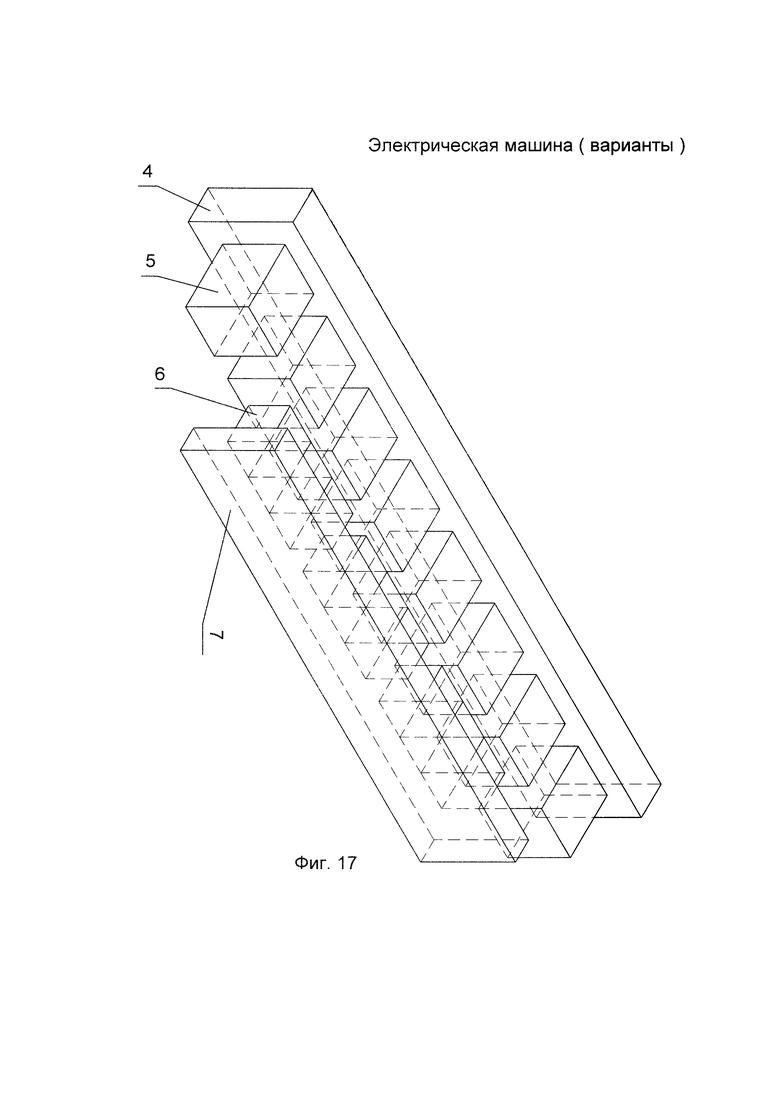
На фиг. 16 изображен вариант выполнения линейной электрической машины, вид сверху.
На фиг. 17 изображен предыдущий вариант в аксонометрической проекции.
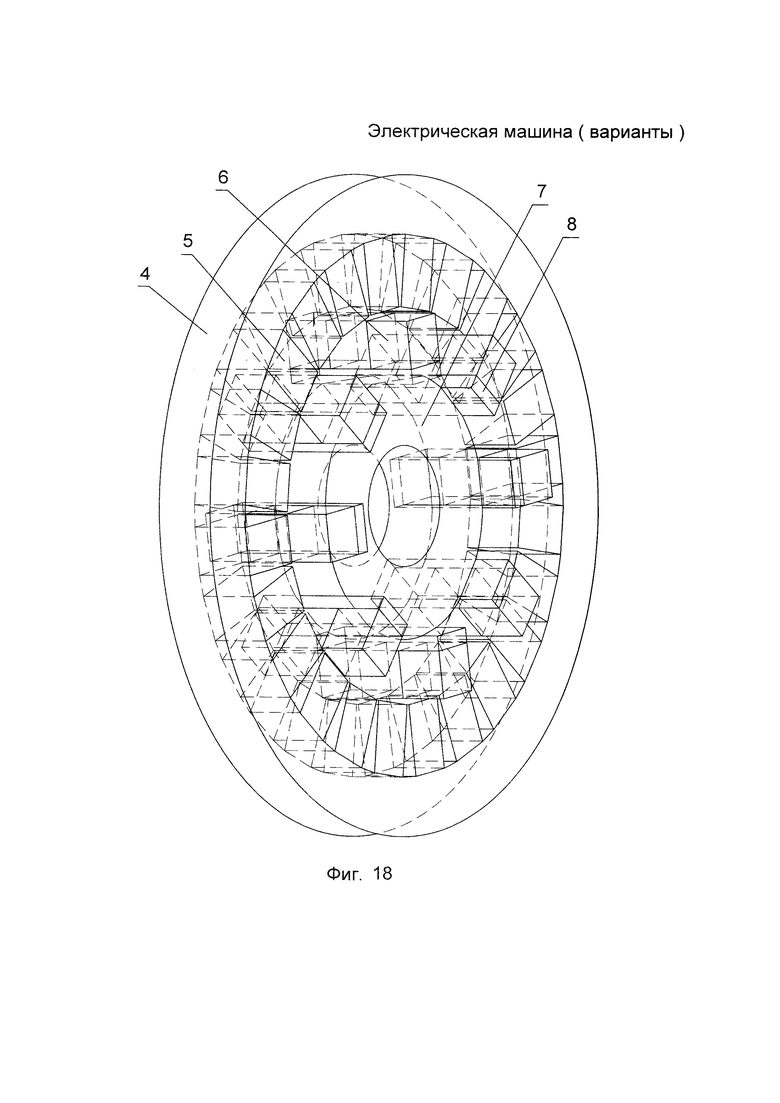
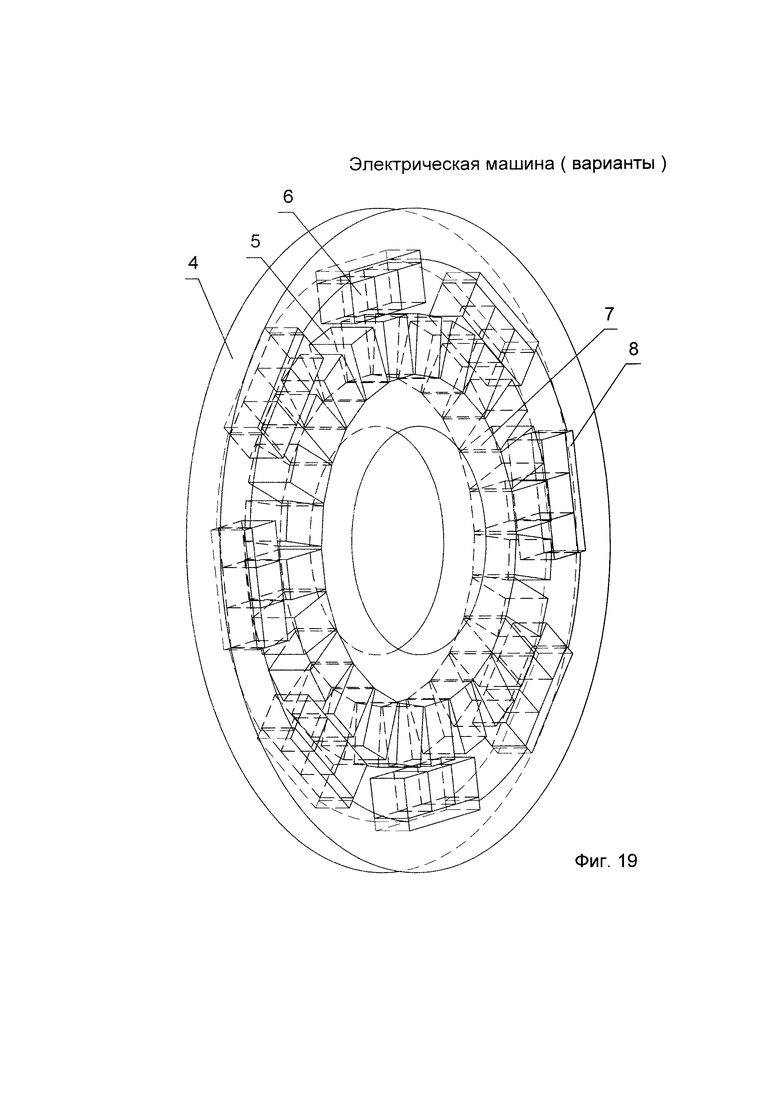
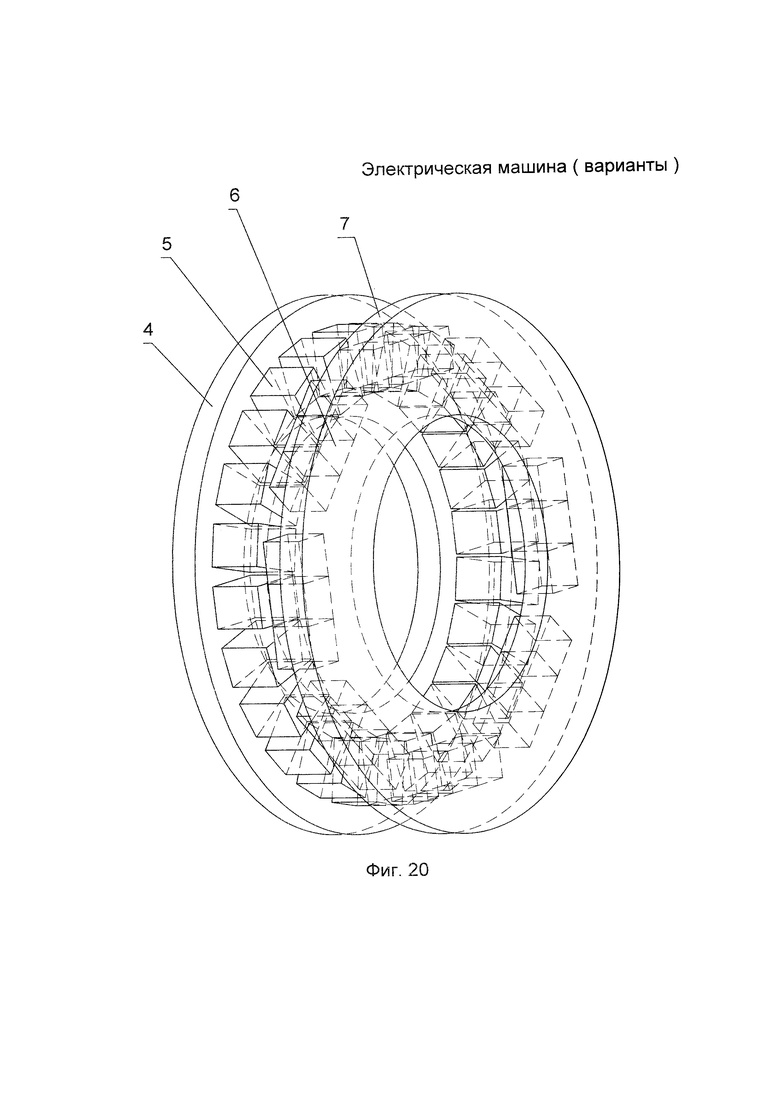
На фиг. 18, 19, 20, 21 изображены варианты выполнения электрической машины с количеством катушек статора равным 24.
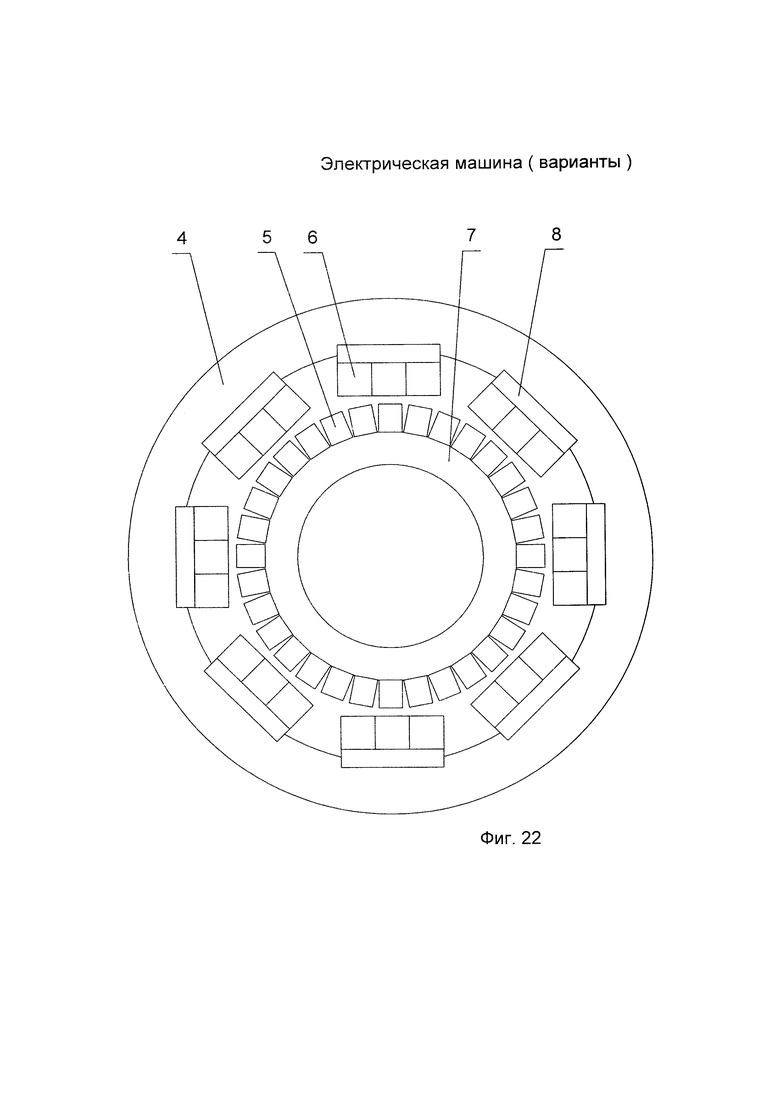
На фиг. 22 изображен вариант выполнения электрической машины с количеством катушек статора равным 32.
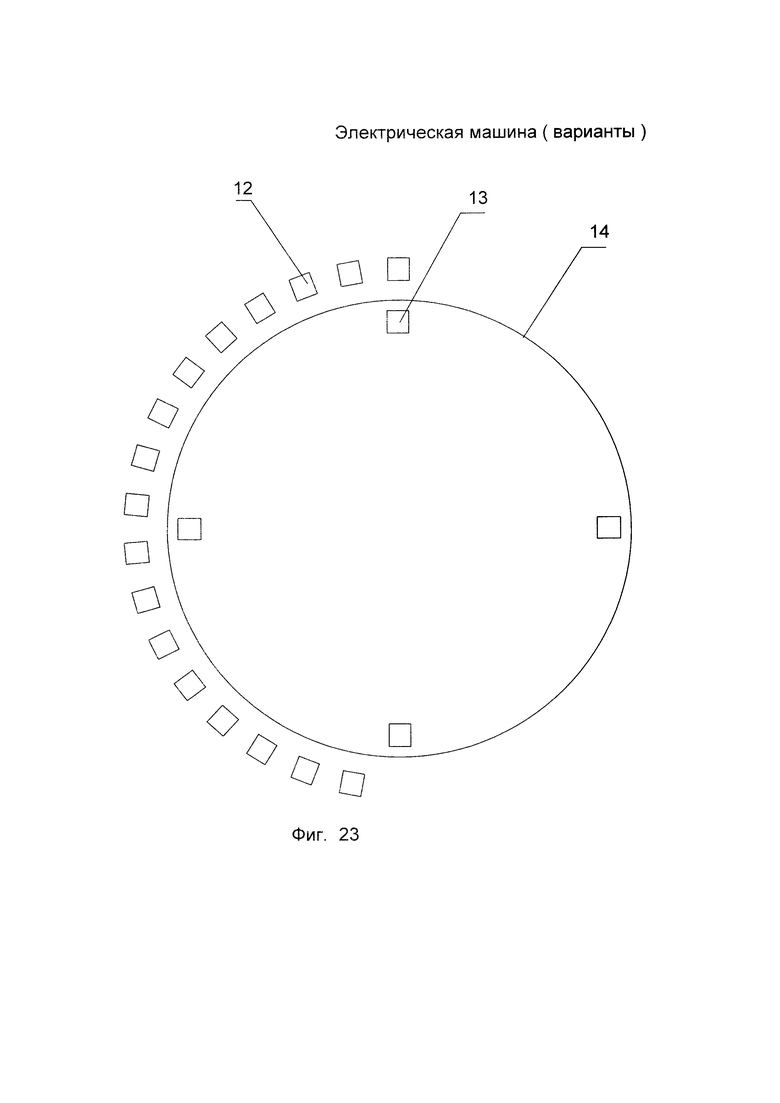
На фиг. 23 изображен вариант расположения датчиков положения ротора.
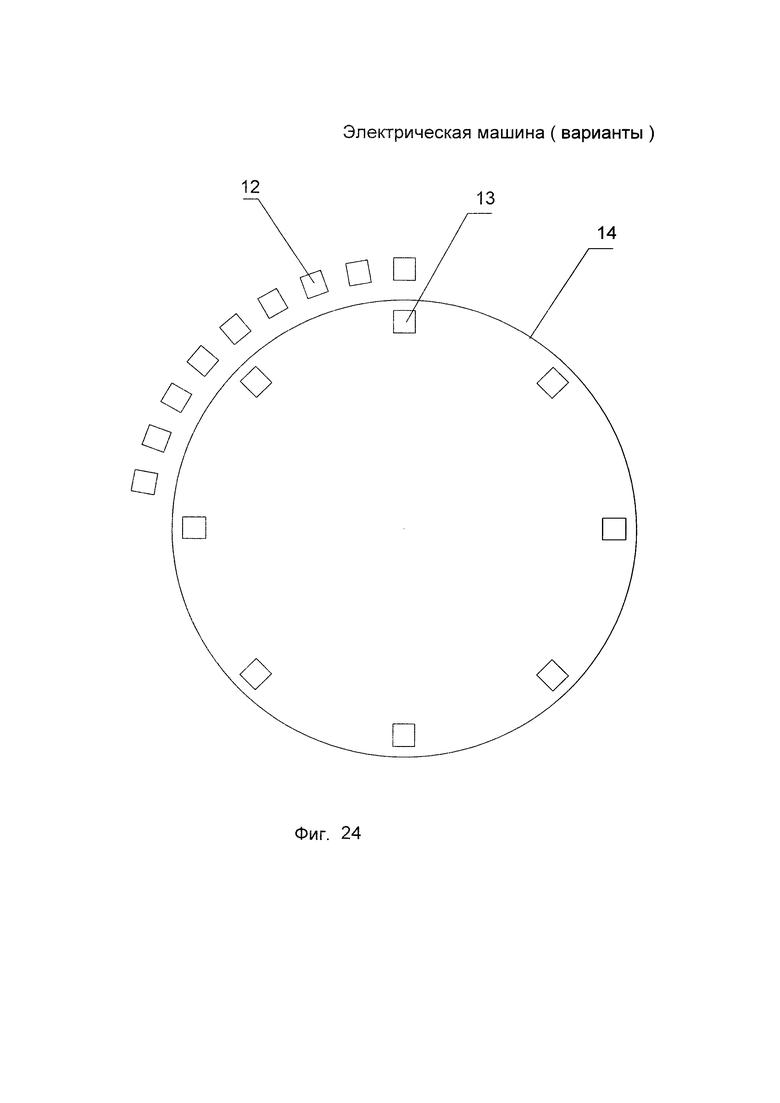
На фиг. 24 изображен другой вариант расположения датчиков положения ротора.
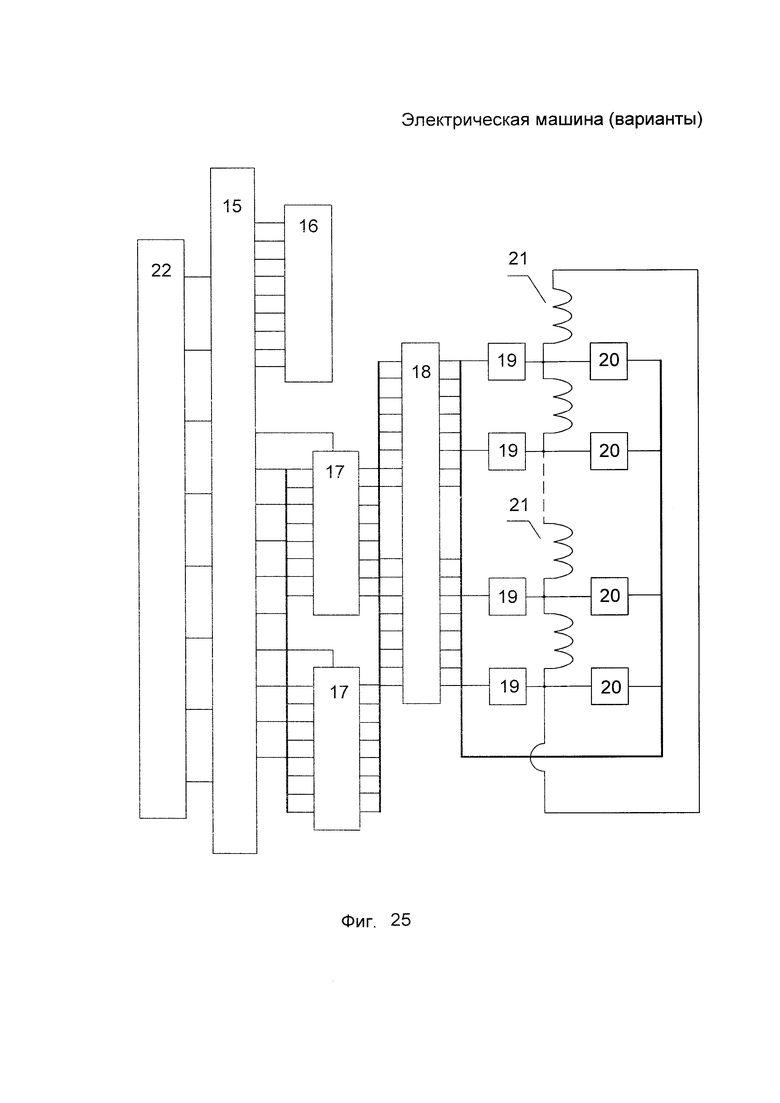
На фиг. 25 изображена структурная схема варианта устройства переключения электрической машины в режиме двигателя.
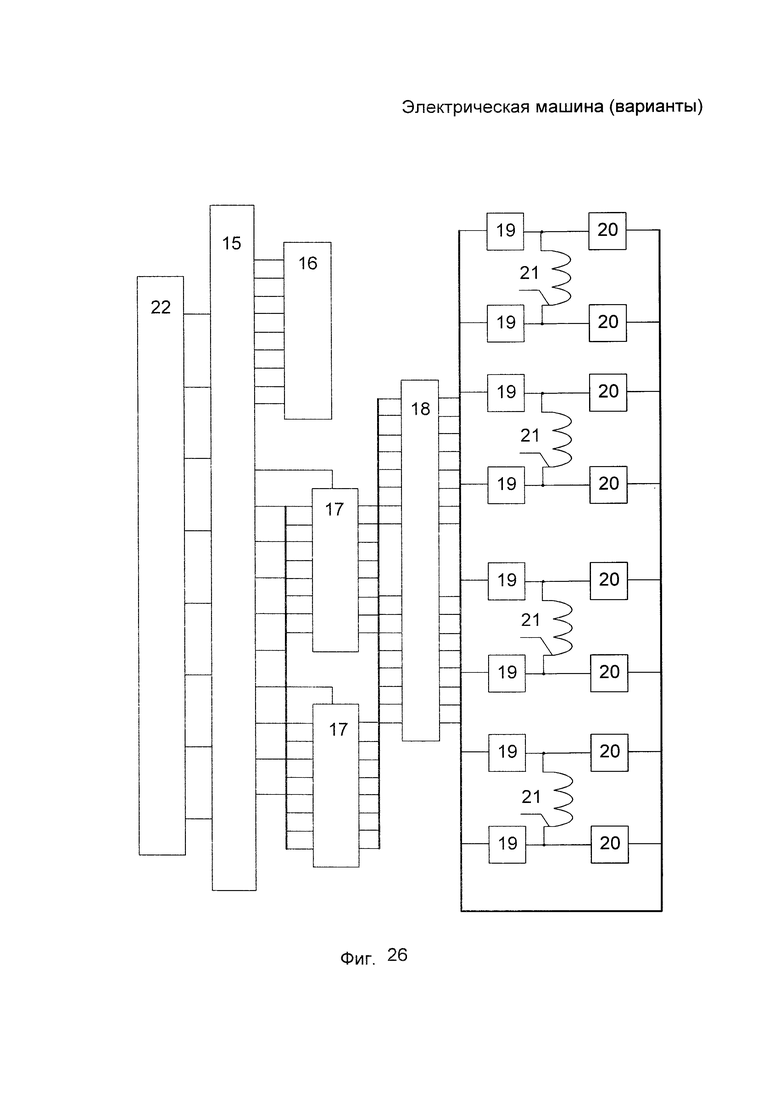
На фиг. 26 изображена структурная схема другого варианта устройства переключения электрической машины в режиме двигателя.
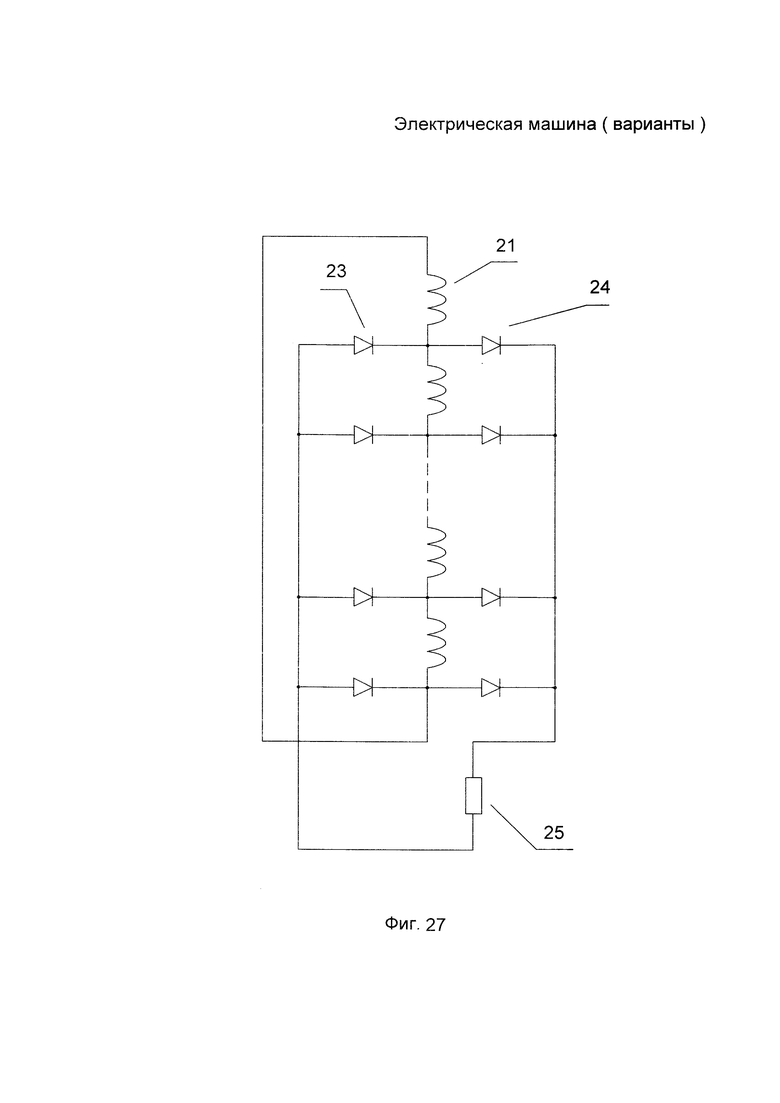
На фиг. 27 изображена функциональная схема варианта устройства преобразования напряжения электрической машины в режиме генератора.
На фиг. 28 изображена блок-схема алгоритма работы устройства переключения.
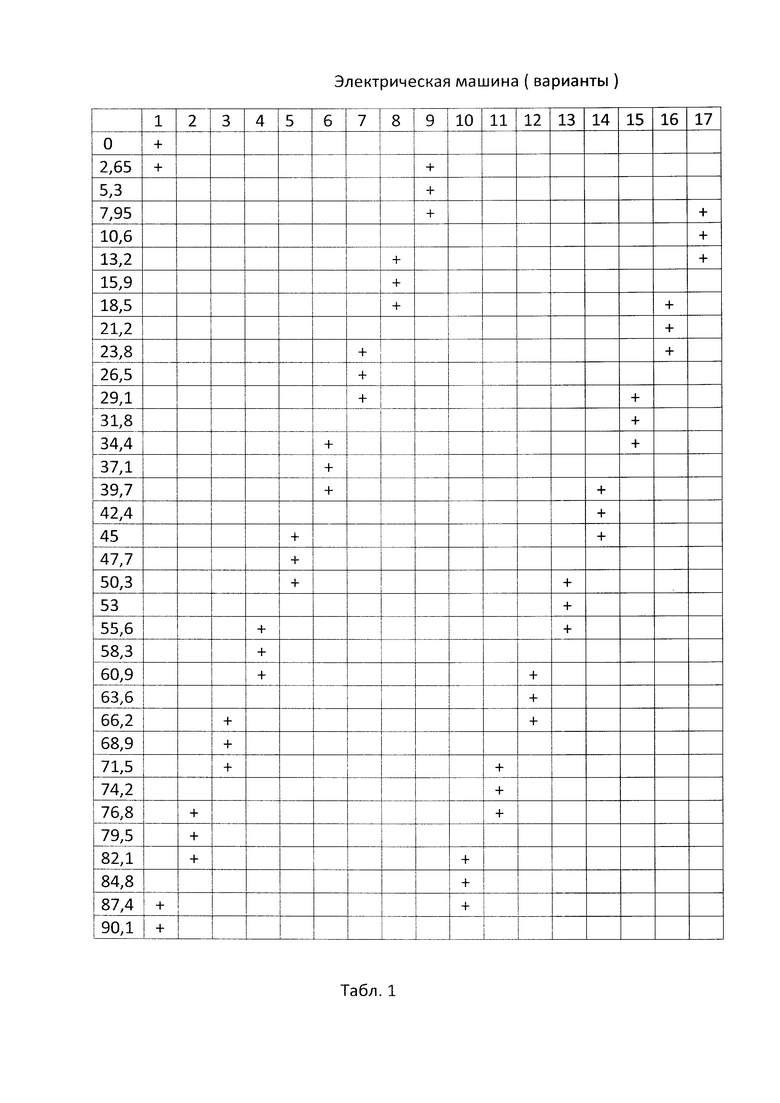
На табл. 1 отображены состояния датчиков положения ротора в зависимости от угла поворота ротора для первого варианта расположения датчиков.
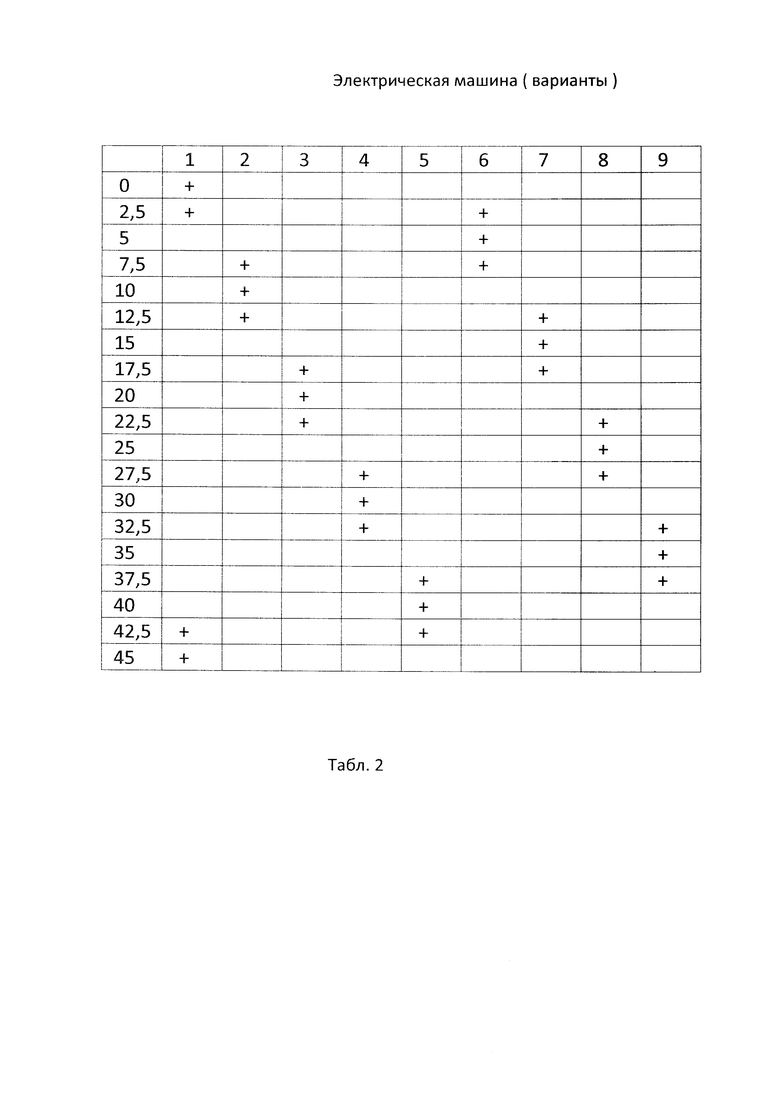
На табл. 2 отображены состояния датчиков положения ротора в зависимости от угла поворота ротора для второго варианта расположения датчиков.
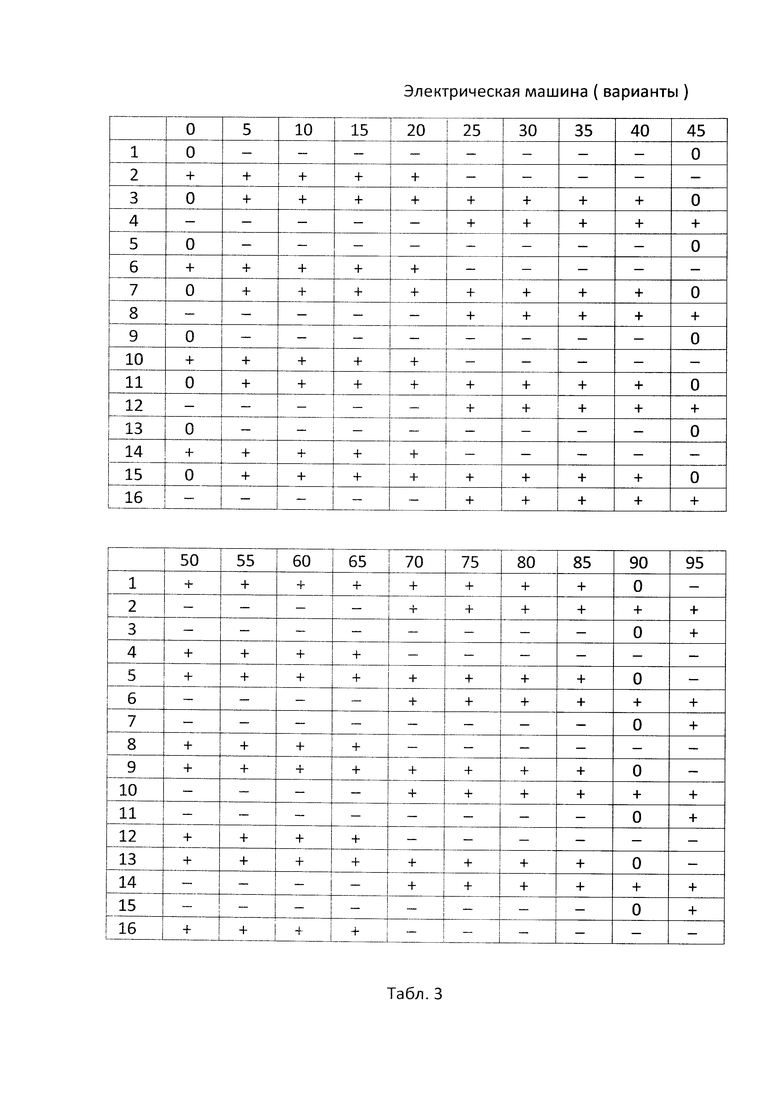
На табл. 3 изображена таблица переключений катушек статора в зависимости от угла поворота ротора для варианта с количеством катушек равным 16.
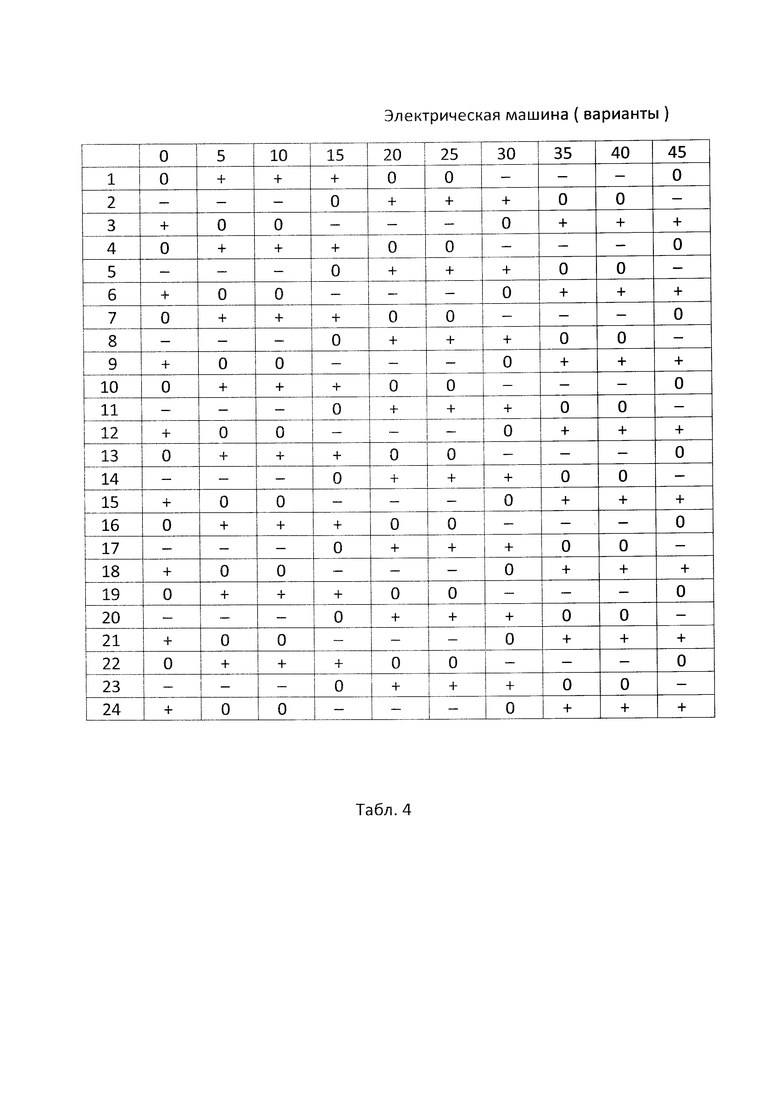
На табл. 4 изображена таблица переключений катушек статора в зависимости от угла поворота ротора для варианта с количеством катушек равным 24.
На табл. 5 изображена таблица переключений катушек статора в зависимости от угла поворота ротора для варианта с количеством катушек равным 32.
Сведения, подтверждающие возможность осуществления каждого объекта заявленной группы изобретений с получением указанного технического результата заключаются в следующем.
Постоянный магнит 1 прямоугольной формы, изображенный на фиг. 1 является базовым элементом для построения линейной магнитной сборки Халбаха. Магнитные силовые линии 2 выходят из северного N полюса магнита и входят в его южный полюс S. Картина поля строго симметрична. Условная граница 3 поля необходима для расчета его параметров с помощью компьютерной программы. Вектор намагниченности постоянного магнита направлен от его южного полюса S к его северному полюсу N вертикально вверх (на чертеже не изображен).
Линейная магнитная сборка Халбаха, изображенная на фиг. 2 состоит из трех постоянных магнитов 1. Магниты 1 соприкасаются друг с другом своими гранями и имеют взаимно перпендикулярные векторы намагниченности. Магнитные силовые линии 2 не симметричны относительно большой оси магнитной сборки. Условная граница 3 поля также необходима для расчета его параметров с помощью компьютерной программы. Векторы намагниченности двух крайних магнитов горизонтальны и могут быть направлены как встречно, так и в разные стороны. Вектор намагниченности среднего магнита расположен вертикально и может быть направлен в обе стороны. Так, например, если направить векторы намагниченности крайних магнитов в разные стороны, а вектор среднего магнита направить сверху вниз, то получим картину поля, изображенную на фиг. 2.
Зона максимальной индукции сборки будет расположена сверху, со стороны южного полюса среднего магнита и условно параллельно большой оси магнитной сборки. Если изменить направление вектора среднего магнита на противоположное, то картина поля будет зеркальным изображением относительно большой оси сборки и зона максимальной индукции будет расположена снизу, но также со стороны южного полюса среднего магнита.
Похожая картина поля будет и при изменении направления векторов крайних магнитов на встречное, но зона максимальной индукции будет уже со стороны северного полюса среднего магнита.
Вариант электрической машины с внутренним ротором изображен на фиг. 3, 4. Внешний статор электрической машины содержит магнитопровод 4 с обмоткой катушечного типа. Группа катушек 5 обмотки расположена с внутренней стороны магнитопровода 4. Каждая катушка 5 обмотки расположена на своем сердечнике (зубце), который является также частью магнитопровода 4.
Катушки 5 со своими сердечниками изображены на фиг. 3 общими прямоугольниками. Количество катушек 5 в группе составляет 16 единиц. Центральный угол между двумя соседними катушками 5 составляет 22,5 градусов. Возможен также вариант размещения катушек обмотки статора в пазах магнитопровода 4. Зубцы магнитопровода 4 будут границами, между которыми будут расположены витки катушек. Количество катушек и центральные углы сохраняются. Сохраняется также и внешний вид чертежей на фиг. 3, 4. Пространство, занимаемое пазами и зубцами, называется зубцовой зоной.
Внутренний ротор данной электрической машины содержит группу линейных магнитных сборок 6 Халбаха, каждая из которых содержит по три (минимально возможных) постоянных магнита. Большие оси магнитных сборок 6 и зоны их максимальной индукции расположены перпендикулярно к плоскости движения ротора (плоскости чертежа на фиг. 3).
Магнитопровод 7 ротора соприкасается с группой линейных магнитных сборок 6 с помощью пластин 8, которые аналогично зубцам 5 являются частью внутреннего магнитопровода 7. Пластины 8 выполнены из ферромагнитного материала, а их габаритные размеры соответствуют габаритным размерам сборок 6. Пластины 8 расположены в зонах минимальной индукции.
Через внутреннее отверстие магнитопровода 7 проходит центральный вал вращения (на чертеже не изображено).
Количество сборок 5 в группе составляет восемь единиц.
Центральный угол между двумя соседними сборками 6 составляет сорок пять градусов.
Вариант электрической машины с внешним ротором изображен на фиг. 5, 6. Внутренний статор данной электрической машины содержит магнитопровод 7 с обмоткой катушечного типа. Группа катушек 5 обмотки расположена с внешней стороны магнитопровода 7. Каждая катушка обмотки расположена на своем сердечнике (зубце), который также является частью магнитопровода 7. Количество катушек в группе и величина центрального угла не изменились. Возможно также размещение катушек обмотки статора в пазах магнитопровода 7.
Внешний ротор содержит группу линейных магнитных сборок 6 Халбаха с магнитопроводом 4, который соприкасается со сборками 6 с помощью пластин 8, которые являются составной частью внешнего магнитопровода 4. Положение больших осей сборок 6 не изменилось.
Количество сборок 6 в группе и величина центрального угла не изменились. Зоны максимальной индукции сборок 6 расположены перпендикулярно к плоскости движения ротора.
Другой вариант электрической машины с внешним ротором изображен на фиг. 7, 8. Конструкция внутреннего статора данной электрической машины аналогична предыдущему варианту. Внешний ротор содержит группу линейных магнитных сборок 6 Халбаха в количестве восьми единиц. Большие оси сборок 6 расположены горизонтально к плоскости движения ротора. Величина центральных углов не изменилась. Зоны максимальной индукции сборок 6 расположены перпендикулярно к плоскости движения ротора. Внешний магнитопровод 4 соприкасается со сборками 6 в зонах минимальной индукции с помощью пластин 8. Количество катушек 5 не изменилось.
Линейный вариант электрической машины, изображенный на фиг. 9, 10, может быть представлен как частный случай вариантов, изображенных на фиг. 3, 4, 5, 6 при стремлении радиуса вращения ротора к бесконечности. При этом магнитопровод 4 становится линейной фигурой и при ограничении его длины и количества катушек 5 с количеством сборок 6 получаем искомый результат.
Большие оси сборок направлены перпендикулярно к вектору движения ротора, функцию которого могут выполнять как сборки 6 с магнитопроводом 7, так и магнитопровод 4 с обмоткой 5. Магнитопровод 7 также является плоской фигурой, поэтому он одновременно выполняет роль и пластины 8.
Конструкция электрической машины, изображенной на фиг. 11, 12 содержит нижний магнитопровод 4 с катушками 5 и верхний магнитопровод 7 с группой линейных магнитных сборок 6.
Зоны максимальной индукции сборок 6 расположены параллельно к плоскости движения ротора. Большие оси магнитных сборок 6 расположены параллельно к плоскости движения ротора и перпендикулярно к радиусу вращения ротора. Количество элементов конструкции и величина центральных углов не изменились. Сборки 6 соприкасаются с плоской поверхностью магнитопровода 7, поэтому он одновременно выполняет роль и пластины 8.
По аналогии с предыдущей, конструкция электрической машины, изображенной на фиг. 13, 14, также имеет нижний магнитопровод 4 с катушками (обмоткой) 5 и верхний магнитопровод 7 с группой линейных сборок 6. Большие оси магнитных сборок 6 расположены вдоль (параллельно) радиусов вращения ротора. В остальном конструкция аналогична предыдущей.
Вариант электрической машины, изображенной на фиг. 15 состоит из двух электрических машин, изображенных на фиг. 12, причем вторая является зеркальным отображением первой. Данный вариант конструкции содержит нижний магнитопровод 4 с катушками 5, средний магнитопровод 7 с первой группой сборок 6 и со второй группой сборок 11 и верхний магнитопровод 9 с катушками 10. Зоны максимальной индукции сборок 6 и 11 расположены параллельно к плоскости движения ротора. В остальном конструкция аналогична исходной.
Линейный вариант электрической машины, изображенной на фиг. 16, 17 есть частный случай вариантов на фиг. 7, 8, 11, 12 при условии стремления значения радиуса вращения к бесконечности и ограничения длины магнитопровода и количества линейных сборок. Большие оси сборок в этом варианте направлены вдоль вектора движения ротора. Устройство содержит плоский магнитопровод 4 с катушками 5 и плоский магнитопровод 7 с группой сборок 6. Функции ротора или статора могут выполнять обе части данного устройства.
На фиг. 18, 19, 20, 21 изображены варианты электрической машины с количеством катушек 5 в магнитопроводах 4 или 7 равным двадцать четыре.
На фиг. 18 изображен вариант с внешним статором, аналогичный варианту на фиг. 4.
На фиг. 19 изображен вариант с внешним ротором, аналогичный варианту на фиг. 8.
На фиг. 20 изображен вариант конструкции, аналогичный варианту на фиг. 12.
На фиг. 21 изображен вариант конструкции, аналогичный варианту на фиг. 7.
На фиг. 22 изображен вариант конструкции, аналогичный варианту на фиг. 21, но с количеством катушек равным тридцать два.
На фиг. 23 и 24 изображены варианты расположения групп датчиков (сенсоров) 12 относительно положения элементов 13 ротора. Датчики могут быть оптическими, гальваномагнитными и индукционными. К датчикам гальваномагнитного типа относятся элементы Холла, магниторезисторы и магнитодиоды. При их использовании элементами 13 ротора могут служить постоянные магниты, от взаимодействия с которыми будут срабатывать сенсоры 12.
Количество датчиков на фиг. 23 составляет 17 единиц. Они расположены относительно четырех элементов 13 ротора, которые соответствуют четырем магнитным сборкам Халбаха, имеющим одинаковые направления намагниченности. Остальные четыре сборки имеют противоположные направления намагниченности относительно центра движения.
Количество датчиков на фиг. 24 составляет 9 единиц и они расположены по отношению к восьми элементам 13 ротора, которые соответствуют восьми сборкам, имеющим одинаковые направления намагниченности относительно центра вращения ротора.
Датчики 12 расположены по дуге окружности неподвижно по отношению к статору. Центральный угол между двумя соседними сенсорами составляет десять градусов. В исходном (нулевом) состоянии центр первого сенсора совпадает с центром элемента 13 ротора.
В таком положении данный датчик будет находиться в активном (включенном) состоянии, которое должно сохраняться при изменении угла поворота ротора менее пяти градусов в обе стороны.
При угле поворота равным пяти градусов и более данный сенсор отключается (переходит в пассивное состояние). В исходном состоянии фиг. 24 центр следующего элемента 13 ротора смещен по отношению к центрам пятого и шестого датчиков на угол равный пяти градусам, значит эти датчики находятся в пассивном состоянии. Включен только первый датчик. Если случайно одновременно, все-таки в этот момент сработают пятый и шестой датчики, то микроконтроллер исправит эту ситуацию, как запрещенную. Срабатывание только шестого и первого датчиков означает небольшой поворот ротора против часовой стрелки, а срабатывание пятого и первого датчиков означает поворот ротора по часовой стрелке.
На фиг. 23 центральный угол между двумя соседними сенсорами составляет 10,6 градусов (округленно). В исходном состоянии включен первый (верхний) датчик. Его состояние будет сохраняться при изменении угла поворота ротора менее 5,3 градусов в обе стороны. Центры девятого и десятого датчиков смещены по отношению к центру элемента ротора на угол равный 5,3 градуса, поэтому они будут выключены. Одновременное срабатывание двух соседних датчиков также является запрещенной ситуацией и микроконтроллер, учитывая предварительное состояние датчиков и направление движения, должен будет внести коррекцию.
Позиция 14 обозначает условную границу между элементами 13 датчика и сенсорами 12.
На фиг. 25 изображена структурная схема варианта устройства переключения электрической машины в режиме двигателя. Устройство содержит микроконтроллер 15, блок датчиков 16 положения ротора, группу регистров 17, блок драйверов 18 (преобразователей) ключей нижнего и верхнего уровней, блок ключей 19 нижнего уровня, блок ключей 20 верхнего уровня, группу катушек 21 обмотки магнитопровода и блок 22 внешнего управления (пульт управления).
Первая группа цифровых входов-выходов (порты ввода - вывода) микроконтроллера 15 подключена к блоку 22 внешнего управления, вторая группа цифровых входов - выходов микроконтроллера 15 подключена к блоку датчиков 16 положения ротора, третья группа цифровых входов - выходов микроконтроллера 15 подключена к объединенным одноименным информационным входам группы регистров 17, управляющие входы которых подключены к четвертой группе цифровых входов - выходов микроконтроллера 15. Выходы группы регистров 17 подключены к соответствующим входам блока драйверов 18 ключей нижнего и верхнего уровней, выходы которых соединены со входами блока ключей 18 нижнего уровня и входами блока ключей 20 верхнего уровня. Выходы одноименных ключей блока 19 и блока 20 объединены между собой и подключены к точкам последовательного соединения группы катушек 21, которая соединена в последовательную цепь и образует замкнутую кольцевую структуру.
В качестве микроконтроллера 15 можно применить один из микроконтроллеров серии AVR. Так, например, микросхема ATmega 8515 имеет 35 цифровых входов-выходов, а микросхема ATmega 64 имеет 53 цифровых входа - выхода, поэтому оптимальный выбор зависит от многих факторов. В качестве регистров 17 можно использовать микросхему КР1554ИР35, которая является восьмиразрядным регистром с параллельным вводом - выводом данных.
В качестве ключей нижнего 19 и верхнего 20 уровней используют МОП (МДП, MOSFET) или IGBT транзисторы, способные работать с напряжением до 1000 В и мощностью свыше 5 кВт. Для управления ими можно применить драйверы 1R2110, 1R2113, логический вход которых совместим со стандартным КМОП выходом, а выходной канал можно использовать для управления силовым транзистором с напряжением питания верхнего уровня до 500 В, или до 600 В (драйверы 18). При использовании низковольтного питания (до 50 В) и средней мощности можно использовать микросхему L 298, которая содержит два МОП-моста со схемой управления, т.е. содержит и драйверы и ключи. Данная микросхема позволяет независимо управлять двумя соленоидами (катушками) с током до 2 А.
Блок внешнего управления 22 (пульт управления) может содержать средства для подачи внешних логических сигналов на микроконтроллер 15, а также цифровые индикаторы для контроля работы электрической машины. Можно задавать и контролировать такие режимы работы, как мощность, скорость вращения, включение и выключение и т.д. Регулирование мощности целесообразно производить с помощью изменения напряжения питания, для чего используют источники питания с регулируемым выходом, например, на тиристорах или симисторах. Вариантов построения пульта 22 бесконечно много и они зависят от конкретных требований к электрической машине. На фиг. 26 изображена структурная схема другого варианта устройства переключения электрической машины в режиме двигателя. В отличие от первого варианта катушки статора не соединяются между собой. Каждая катушка независимо управляется своим МОП-мостом, образованным ключами 19 нижнего уровня и ключами 20 верхнего уровня.
На фиг. 27 изображена функциональная схема варианта устройства преобразования напряжения электрической машины в режиме генератора. Устройство содержит группу катушек 21 обмотки магнитопровода, соединенных последовательно с образованием замкнутой электрической цепи. Устройство содержит также две группы выпрямительных диодов 23, 24 и элемент нагрузки 25. Катоды первой группы диодов 23 соединены с анодами второй группы диодов 24 и точками соединений катушек 21. Аноды первой группы диодов 23 соединены между собой и подключены к первому выводу элемента нагрузки 25, второй вывод которого соединен с объединенными катодами второй группы диодов 24. В качестве диодов 23, 24 можно применять выпрямительные диоды с допустимым током в несколько ампер и с допустимым обратным напряжением до 1000 В, например диоды 1N4007.
На табл. 1 представлена таблица состояний сенсоров 12 (см. фиг. 23) в зависимости от угла поворота ротора. Нулевому углу соответствует положение датчиков, изображенное на фиг. 23. Нумерация сенсоров сквозная, от верхнего (первого) до семнадцатого против часовой стрелки. Изменение угла поворота ротора через 2,65 градусов от нуля до 90 градусов. Далее картина повторяется. Активное состояние сенсора отмечается знаком плюс. Таблица составлена для варианта вращения ротора по часовой стрелке.
На табл. 2 зафиксированы состояния сенсоров 12 (см. фиг. 24) при повороте ротора против часовой стрелки. Изменение угла поворота через 2,5 градусов от нуля до 45 градусов. Далее картина повторяется. Активное состояние сенсоров отмечается знаком плюс.
На табл. 3 представлена таблица переключений катушек обмотки статора в зависимости от угла поворота ротора. Количество катушек 16, количество сборок 8 (фиг. 7, 8)
По вертикали таблицы зафиксированы номера катушек. По горизонтали таблицы обозначены углы поворота ротора. При нулевом угле первая катушка расположена напротив первой линейной сборки 6 при угле поворота 22,5 градусов первая сборка будет находиться напротив второй (шестнадцатой) катушки, при угле 45 градусов напротив третьей (пятнадцатой) катушки, при угле сорок пять градусов напротив третьей катушки (четырнадцатой). При угле 90 градусов напротив пятой катушки. Далее состояние катушек повторяется. Соседние сборки 6 намагничены в противоположные стороны по отношению к центру вращения.
За положительный угол поворота можно принять поворот в любую сторону. Знаком плюс отмечается положительное направление (условное) тока через катушку, знаком минус отмечается отрицательное направление тока через данную катушку, знаком ноль отмечается выключение тока через данную катушку.
На табл. 4 отображаются переключения катушек для вариантов на фиг. 18, 19, 20, 21. Количество катушек равно 24, диапазон изменения угла 45 градусов. Далее картина повторяется. Все сборки намагничены в одну сторону по отношению к центру вращения.
На табл. 5 зафиксированы переключения катушек для варианта на фиг. 22. Количество катушек равно 32, диапазон изменения угла равен 45 градусов. Все сборки намагничены одинаково.
Электрическая машина работает следующим образом.
По определению вращающий момент (крутящий момент, момент вращения, момент силы) равен векторному произведению силы вращения на радиус вращения, и его модуль будет равен
М=F⋅R⋅sin∝
где М - вращающий момент
F - сила вращения
R - радиус вращения
∝ - угол между направлением силы вращения и радиусом вращения.
Согласно закону Ампера сила, действующая на проводник с током I в магнитном поле с индукцией В, пропорциональна произведению значения тока на значение индукции. Аналогичная сила, согласно третьему закону Ньютона, будет действовать на магниты ротора со стороны магнитного поля, создаваемого токами катушек статора, но с противоположным знаком. Значит вращающий момент, при прочих равных условиях, будет пропорционален значению магнитной индукции в рабочем зазоре электрической машины.
Рассмотрим функционирование варианта электрической машины, изображенного на фиг. 7, 8. Пронумеруем катушки фиг. 7 от 1 до 16 по часовой стрелке, считая первой верхнюю катушку. Аналогично пронумеруем магнитные сборки от 1 до 8, считая первой верхнюю сборку. За нулевое (исходное) состояние примем расположение катушек и сборок, изображенное на фиг. 7.
Соседние магнитные сборки намагничены по разному. Для определенности примем, что у первой, третьей, пятой и седьмой сборки в рабочем зазоре находится южный полюс, а у второй, четвертой, шестой и восьмой в зоне максимальной индукции будет северный полюс. Также примем, что положительному значению угла поворота ротора будет соответствовать поворот по часовой стрелке. Согласно табл. 3 для поворота ротора из нулевого положения по часовой стрелке необходимо включить определенные катушки (создать ток). Значения токов указаны в первом столбце (нулевой угол). Катушки 1, 3, 5, 7, 9, 11, 13, 15 могут быть выключены, т.к. они не создадут вращающего момента. Для них sin∝=0. Катушки 2, 6, 10, 14 должны иметь ток со знаком плюс. Катушки 4, 8, 12, 16 должны иметь ток со знаком минус т.е. в противоположном направлении.
В результате появится вращающий момент для поворота ротора по часовой стрелке. При изменении направления токов на противоположные появится вращающий момент для поворота ротора против часовой стрелки.
При повороте ротора по часовой стрелке сработает датчик 9 фиг. 23 и микроконтроллер даст команду на включение тока в катушках 1, 3, 5, 7, 9, 11, 13, 15 со знаком минус, при сохранении токов в других катушках. Такое состояние должно сохраняться до угла поворота 22.5 градусов. При таком угле поворота ротора каждая катушка занимает предыдущее место соседней катушки, которое она занимала при угле поворота ноль градусов. При таком положении ротора можно выключить часть катушек на короткое время, но уже при угле 23,8 градусов в активном состоянии будут датчики 7 и 16 табл. 1 и катушки должны переключаться в соответствии с шестым столбцом для 25 градусов табл. 3. Зона от 21,2 до 23,8 градусов является неоднозначной и ее можно принимать за нулевой угол, т.е. выключать часть катушек.
Далее состояние катушек должно сохраняться до угла поворота ротора 45 градусов, при котором каждая катушка снова занимает место следующей катушки. При этом угле включены датчики с номерами 5 и 14, что дает точную фиксацию момента перехода через эту точку.
При этом угле часть катушек можно выключить, но при угле 47,7 градусов катушки переключаются в соответствии с одиннадцатым столбцом для 50 градусов табл. 3.
Каждая из катушек с номерами 2, 4, 6, 8, 10, 12, 14, 16 при углах поворота ротора 0 и 45 градусов создает вращающий момент одновременно для двух соседних линейных сборок, которые намагничены по разному. За счет этого сила вращения, создаваемая этими катушками направлена в одну сторону (по часовой стрелке).
Далее переключение катушек происходит аналогично и в соответствии с табл. 1, 3. При углах поворота ротора 67,5 и 90 градусов необходимы новые переключения катушек.
Начиная с угла поворота ротора 90 градусов цикл переключений полностью повторяется.
Переключением токов в катушках в зависимости от угла поворота ротора, управляет микроконтроллер 15 фиг. 26. Алгоритм его работы представлен на Фиг. 28.
Блок 26. После включения питания происходит начальный сброс и выполнение программы начинается с нулевого адреса.
Блок 27. Выполняется начальная установка системы. Обнуляется счетчик номера циклов. Выключаются токи через все катушки.
Блок 28. Считывание кода с блока 22 внешнего управления через цифровые входы-выходы микроконтроллера 15 фиг. 26. Проверка кода на разрешение работы. При отсутствии разрешения организуется цикл и происходит процесс повторения запросов на разрешение работы. При наличии разрешения переход к блоку 29. Разрешение может выполняться как оператором, так и подачей команды от внешнего (удаленного) источника.
Блок 29. Запись информации с датчиков положения ротора через цифровые входы- выходы микроконтроллера. Включение индикации на пульте управления. Проверка кода на наличие запрещенных состояний датчиков положения ротора. Исправление таких состояний. Определение угла поворота ротора. В соответствии с таблицами, определение кода для включения катушек статора. Запись данного кода в регистры 17 фиг. 26. Увеличение содержимого счетчика номера цикла на единицу. Переход к блоку 30.
Блок 30. Ветвление программы в зависимости от номера цикла. Если цикл первый, то переход к блоку 33. Если цикл не первый, то переход к блоку 31.
Блок 31. Ветвление программы в зависимости от результата сравнения предыдущего кода сдатчиков положения ротора и нового кода. Если код не изменился, то переход к блоку 34. Если код изменился, то переход к блоку 32.
Блок 32. Определение значения интервала времени между двумя соседними углами поворота ротора по таймеру. Вычисление скорости движения ротора. Запись информации на пульт управления. Обнуление таймера. Новое включение таймера. Переход к блоку 28.
Блок 33. Включение таймера при первом цикле. Переход к блоку 34 или к блоку 28.
Блок 34. Определение интервала времени для разных циклов. Переход к блоку 35.
Блок 35. Сравнение измеренного интервала времени с допустимым значением. Если измеренное значение меньше допустимого, то переход к блоку 3. Если измеренное значение не меньше предельно допустимого, то переход к блоку 36.
Блок 36. Фиксация аварийного состояния. Индикация на пульте управления аварийного режима. Переход к блоку 37.
Блок 37. Остановка работы.
Варианты электрических машин, изображенные на фиг. 3, 4, 5, 6 функционируют аналогичным образом. Датчики положения ротора для этих вариантов расположены в соответствии с табл. 1. Катушки статоров должны переключаться в соответствии с табл. 3. Микроконтроллер функционирует согласно алгоритму на Фиг. 28.
Линейные варианты электрических машин, изображенные на фиг. 9, 10, 16, 17 имеют свои конструктивные особенности, но принципы функционирования, изложенные выше, могут быть использованы и для этих вариантов. Отличием будет то, что датчики положения ротора должны быть расположены вдоль движения ротора линейным образом, а таблицы переключений катушек и датчиков положения ротора должны охватывать весь диапазон движения ротора, выраженный в линейных единицах измерения.
Варианты выполнения электрических машин, изображенных на фиг. 11, 12, 13, 14 также функционируют аналогичным образом с использованием тех же таблиц и алгоритмов. Но благодаря горизонтальному расположению зон максимальной индукции сборок по отношению к плоскости движения ротора здесь могут возникать вертикальные составляющий силы взаимодействия между сборками и катушками статора. Эти силы направлены перпендикулярно плоскости вращения ротора и его радиусу и не создают вращающего момента. Однако они могут оказывать негативное влияние на работу электрической машины. В частности, их действие может создавать тормозящий эффект и приводить к преждевременному износу подшипников.
Для компенсации этих сил предусмотрен вариант электрической машины, изображенный на фиг. 15. Он состоит из двух электрических машин, изображенных на фиг. 12, причем вторая (верхняя) является зеркальным отображением первой. Такая сдвоенная конструкция электрической машины позволит компенсировать негативные силы, действующие на ротор при удвоении силы вращения. Данные силы могут возникать в каждой электрической машине, но будут направлены противоположно друг к другу и взаимно компенсироваться. В остальном работа этой машины аналогична предыдущим.
Катушки статора для вышеприведенных вариантов должны быть включены в соответствии со схемой фиг. 26, где каждая катушка переключается с помощью МОП-моста, независимо от состояния соседних катушек. В схеме фиг. 25 переключение возможно только в случаях, когда соседние катушки должны иметь разные токи. Одинаковые токи (по величине и направлению) будут только при последовательном включении нескольких катушек, и при отключении промежуточных ключей низкого и верхнего уровней. Но в этом случае величина общего тока уменьшится пропорционально количеству включенных катушек.
Согласно табл. 3 одинаковые токи в соседних катушках возможны во многих случаях, при разных углах поворота ротора, поэтому переключение происходит в соответствии со схемой фиг. 26.
Варианты электрической машины, изображенные на фиг. 18, 19, 20, 21 содержат по 24 катушки на 8 сборок. Рассмотрим их функционирование на примере фиг. 21. Центральный угол между двумя соседними катушками составляет 15 градусов. Соседние линейные магнитные сборки могут быть намагничены как одинаково, так и в противоположных направлениях. Рассмотрим первый вариант. Расположение датчиков положения ротора для этого варианта изображено на фиг. 24.
Количество датчиков составляет 9 штук. Центральный угол между двумя соседними датчиками составляет 10 градусов. Совместное срабатывание двух соседних датчиков также запрещено. Количество элементов ротора 8 штук. В табл. 2 отображается состояние датчиков в зависимости от угла поворота ротора против часовой стрелки (для сравнения с табл. 1) от 0 до 45 градусов, далее цикл повторяется. Точками переключения являются углы 0, 15, 30, 45 градусов. В табл. 4 приведены состояния катушек в зависимости от угла поворота ротора. Восемь катушек выключены при каждом угле поворота. Значение плюсов и минусов условное и означает различное направление тока в катушках. При анализе табл. 4 можно отметить, что токи в соседних катушках всегда имеют противоположное направление, поэтому для переключения катушек можно использовать схему фиг. 25, которая является более простой по сравнению со схемой табл. 26.
Преимуществом этого варианта можно также считать упрощение конструкции датчиков положения ротора, и большую стабильность величины силы вращения в зависимости от угла поворота.
Последнее объясняется тем, что количество катушек, которые взаимодействуют с данной сборкой при данном угле поворота становится больше, а значит можно более точно подобрать момент переключения конкретной катушки.
В остальном работа аналогична рассмотренным выше вариантам.
На фиг. 22 изображен вариант электрической машины, содержащей 32 катушки на 8 линейных магнитных сборок. Конструкция датчиков положения ротора соответствует фиг. 24, а состояния катушек отображены в табл. 5. Центральный угол между соседними катушками равен 11,25 градусов. Точками переключения являются углы 0; 11,25; 22,5; 33,75; 45 градусов. Согласно табл. 5 в определенные моменты, с конкретными сборками взаимодействуют по три катушки, причем две из них имеют одинаковые токи. Это усиливает силу вращения. Однако в отдельных случаях можно ограничиться и двумя катушками с разными токами для использования схемы фиг. 25.
В данном варианте наблюдается еще большая стабильность величины силы вращения от угла поворота ротора, за счет увеличения количества катушек, взаимодействующих с конкретной сборкой. В остальном работа аналогична рассмотренным выше вариантам.
Здесь необходимо отметить, что магнитопровод 4 ротора и пластины 8 расположены со стороны зоны минимальной индукции сборок 6. Магнитное поле в этой области сильно ослаблено и эффект (увеличение силы вращения) от применения данного магнитопровода и пластин не превышает нескольких процентов. Поэтому в отдельных случаях конструкцию данного магнитопровода можно выполнять из немагнитного материала (алюминия), а вместо пластин просто размещать магнитные сборки внутри магнитопровода. Это уменьшит вес и упростит конструкцию электрической машины. Это также дает возможность применять вариант с тангенциальным намагничиванием магнитных сборок, что расширяет функциональные возможности электрической машины. Также следует отметить возможность применения рассмотренных вариантов для создания безконтактных магнитных подшипников, работающих на принципе магнитной левитации. Для этого следует включать только те катушки, которые находятся напротив центров сборок. Силы взаимодействия будут направлены по радиусу, не будут создавать вращающий момент, но создадут эффект магнитной левитации. Такой режим работы будет отличаться от рассмотренных только несколько иной программой работы микроконтроллера, а именно, составом таблицы переключений катушек.
На фиг. 27 изображен вариант функциональной схемы устройства преобразования напряжения электрической машины в режиме генератора. Согласно закону Фарадея (электромагнитной индукции) электродвижущая сила (э.д.с.), возникающая в замкнутом контуре, пропорциональна изменению магнитного потока через этот контур. На основании этого закона при вращении ротора электрической машины в катушках статора будет возникать э.д.с. При возникновении напряжения на любой катушке статора, происходит его подключение через диоды 23, 24 к нагрузке 25. По нагрузке 25 будет течь электрический ток с падением напряжения фиксированной полярности. Величина напряжения зависит от числа витков катушек, величины магнитной индукции в рабочем зазоре и скорости вращения ротора. При низких скоростях вращения, например в генераторах использующих силу ветра, можно увеличивать диаметры ротора и статора с увеличением количества катушек и магнитных сборок.
Таким образом, с помощью электрической машины можно осуществлять двухстороннее преобразование механической и электрической энергии.
Для всех вариантов исполнения электрических машин с линейными магнитными сборками Халбаха были разработаны компьютерные модели и проведены расчеты методом конечных элементов. Были определены силы вращения, действующие на ротор в зависимости от угла его поворота. Результат расчетов подтверждает значительное усиление силы вращения (вращающего момента) при использовании линейных магнитных сборок в роторе электрической машины. Для вариантов с увеличенным количеством катушек на одну сборку подтверждалось увеличение стабильности величины силы вращения в зависимости от угла поворота ротора.
Предлагаемую электрическую машину можно использовать в различных областях промышленности и сельского хозяйства. Весьма эффективно ее применение при создании электромобилей. Сочетание ее технических характеристик с низковольтным напряжением питания автомобиля дает возможность применения микросхем L 298, что значительно упрощает схему переключения. Все это в совокупности позволит создать децентрализованную конструкцию двигателя автомобиля, с размещением его элементов непосредственно в колесах автомобиля. При этом убирается малоэффективная механическая передача энергии от центрального двигателя к колесам, снижаются потери энергии и вес автомобиля. Наличие микроконтроллера в каждом двигателе позволит эффективно управлять движением всего автомобиля, снижать энергозатраты и повышать надежность управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2021 |
|
RU2770789C1 |
| Синхронный электрический генератор с многополюсной комбинированной магнитной системой с постоянными магнитами | 2019 |
|
RU2709788C1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829315C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2098908C1 |
| Способ защиты от возгорания электрической машины с постоянными магнитами на роторе цилиндрического типа, снижения потерь и повышения экономичности при работе на частичных режимах двигателя | 2017 |
|
RU2664557C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
| МОТОР-КОЛЕСО | 1998 |
|
RU2156191C2 |
| Синхронная машина | 2021 |
|
RU2759219C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ВЫСОКОСКОРОСТНОЙ УЛЬТРАЦЕНТРИФУГИ | 2005 |
|
RU2292624C1 |
| МНОГОФАЗНОЕ СТАТОРНОЕ УСТРОЙСТВО | 2010 |
|
RU2557562C2 |







Изобретение относится к области электротехники и может быть использовано при создании двигателей (генераторов) с постоянными магнитами. Технический результат - увеличение вращающего момента в режиме двигателя и отдаваемой мощности в режиме генератора. В электрической машине, содержащей статор, ротор, устройство переключения в режиме двигателя и устройство преобразования напряжения в режиме генератора, ротор содержит группу линейных магнитных сборок Халбаха, зоны максимальной индукции которых расположены перпендикулярно или параллельно к плоскости движения ротора. Внешний или внутренний статор содержит магнитопровод с обмоткой. Возможен линейный вариант исполнения электрической машины и вариант конструкции с двумя электрическими машинами, причем вторая является зеркальным отображением первой. 2 н. и 2 з.п. ф-лы, 28 ил., 5 табл.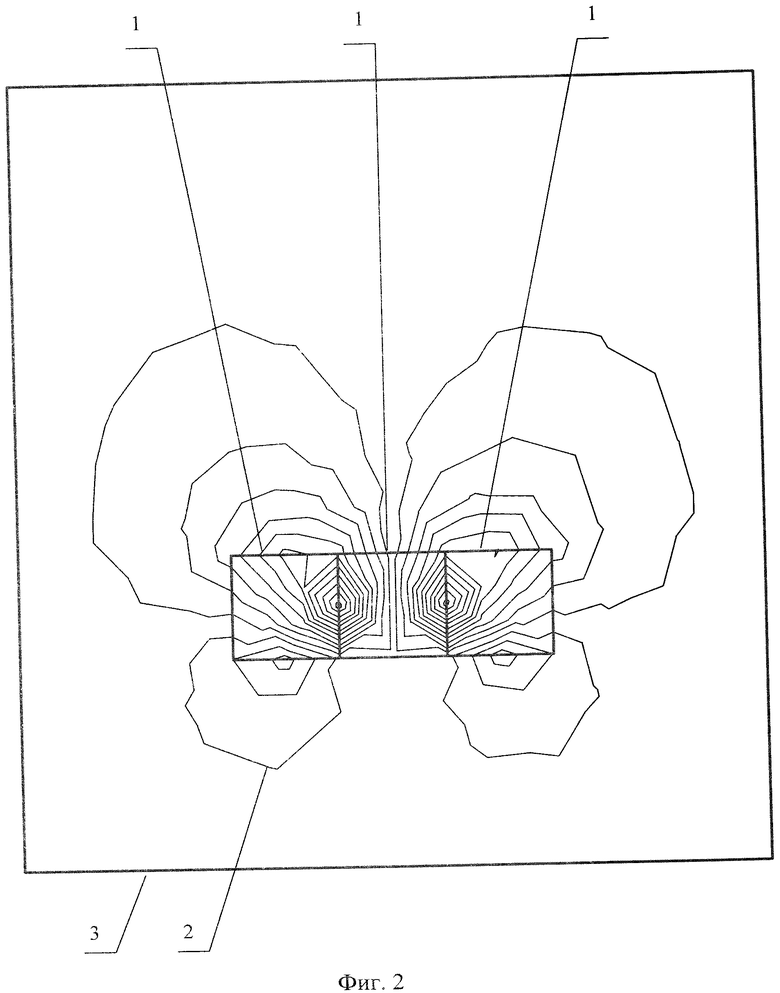
1. Электрическая машина (варианты), содержащая статор, ротор, устройство переключения в режиме двигателя и устройство преобразования напряжения в режиме генератора, отличающаяся тем, что данное устройство содержит группу линейных магнитных сборок Халбаха, зоны максимальной индукции которых расположены либо перпендикулярно, либо параллельно к плоскости движения ротора с точностью до нескольких градусов, причем при замкнутых магнитопроводах ротора и статора данное устройство является вращающейся электрической машиной.
2. Электрическая машина по п. 1, отличающаяся тем, что при перпендикулярном расположении зон максимальной индукции к плоскости движения ротора внутренний или внешний ротор содержит группу линейных магнитных сборок Халбаха с магнитопроводом, а внешний или, соответственно, внутренний статор содержит магнитопровод с обмоткой.
3. Электрическая машина по п. 1, отличающаяся тем, что при параллельном расположении зон максимальной индукции к плоскости движения ротора дополнительно вводится вторая аналогичная электрическая машина, содержащая второй статор и второй ротор со своими магнитопроводами, причем магнитопровод второго ротора объединен с магнитопроводом первого ротора, а вторая электрическая машина является зеркальным отображением первой.
4. Электрическая машина (варианты), содержащая статор, ротор, устройство переключения в режиме двигателя и устройство преобразования напряжения в режиме генератора, отличающаяся тем, что данное устройство содержит группу линейных магнитных сборок Халбаха, зоны максимальной индукции которых расположены либо перпендикулярно, либо параллельно к плоскости движения ротора с точностью до нескольких градусов, причем при разомкнутых магнитопроводах ротора и статора данное устройство преобразуется в линейную электрическую машину, в которой функции ротора или статора может выполнять как группа линейных магнитных сборок Халбаха с магнитопроводом, так и, соответственно, магнитопровод с обмоткой.
| EA 201270175A, 30.01.2013 | |||
| US 5705902 A, 06.01.1998 | |||
| US 2008224557 A1,18.09.2008 | |||
| US 2014354243 A1, 04.12.2014 | |||
| US 2013078123 A1, 28.03.2013 | |||
| WO 2014062887 A2, 24.04.2012 | |||
| WO 2015148719 A1, 01.10.2015. |

