Изобретение относится к области ориентирования в замкнутом пространстве людей с ограниченными зрительными возможностями по сигналам навигационных бесспутниковых систем, использующих RFID-технологию.
Известна система ориентации в пространстве людей с нарушением зрительных функций [Варламов С.Е., Болотин Н.Б. Патент РФ на изобретение №2299052 от 04.08.2005, МПК: A61F 9/08, G01S 17/46, G01C 21/00, G09B 21/00, G01R 33/02, А61Н 3/06, G01V 15/00, Система ориентации в пространстве людей с нарушением зрительных функций], содержащая, по меньшей мере, по одному источнику и приемнику сигналов, подключенных через коммутатор к устройству обработки информации, соединенному через модулятор с соответствующим устройством воздействия на человека. Через коммутатор к устройству обработки информации дополнительно подключены также магнетометр и шагомер, а система GPS подключена к коммутатору через антенну.
К недостаткам устройства следует отнести зависимость его работы от проницаемости стенок зданий и сооружений (особенно железобетонных или расположенных под поверхностью земли) для электромагнитного излучения, используемого в GPS/ТЛОНАСС, а также невысокую точность позиционирования (10…50 м), что для ориентации, особенно в замкнутом пространстве, является недопустимым.
Известна система [РУЙ ДА СИЛВА ФРЕЙТАШ Диаментину, Патент РФ на изобретение №2490694 от 29.06.2009, МПК: A61F 9/08, G06F 3/16 Система ориентирования, навигации и информации, специально адаптированная для слепых или людей с ограниченными зрительными возможностями], в которой обеспечивается возможность осуществлять доступ к информации снаружи или изнутри частных или общественных помещений или местоположений с помощью традиционного мобильного телефона, оборудованного одним или более дополнительных каналов связи, или беспроводного коммуникатора, обеспечивает возможность одновременного ориентирования и навигации пользователя/ей системы по интересующим местам согласно их инструкциям с помощью дискретной и непрепятствующей системы источников звука и также с помощью сотовой системы или сети радиосвязи, такой как Bluetooth или Wi-Fi и/или другие, вставленные в и связанные с интересующими местами пользователя. Она обеспечивает возможность пользователю узнать его (ее) точное местоположение и может направить его (ее) маршрут.
К недостаткам системы следует отнести зависимость ее работы от проницаемости стенок зданий и сооружений для электромагнитного излучения, обеспечиваемого сотовыми операторами и сетями радиосвязи.
Известно устройство [Райхман В.М., Плетнев М.Л. Патент на полезную модель №97918 от 29.03.2010, МПК A61F 9/08, Коммуникативная система для информирования и ориентирования слепых], содержащее установленный на объекте информационный блок, включающий цифровое запоминающее устройство, кодер, радиопередатчик, таймер, схему управления, цифровые часы-календарь, радиоприемник, декодер, генератор, цифровой регулятор громкости, усилитель и электроакустический преобразователь, и носимый блок, включающий устройство ручного управления, кодер, радиопередатчик, схему управления, устройство тактильного воздействия, радиоприемник, декодер, цифровое запоминающее устройство, цифро-аналоговый преобразователь, ручной регулятор громкости, усилитель и электроакустический преобразователь.
К недостаткам устройства следует отнести высокую сложность, а также дополнительное загрязнение окружающего пространства электромагнитным излучением за счет непрерывной работы информационных блоков, установленных на объектах инфраструктуры.
Наиболее близким по технической сущности к заявляемому объекту является мобильное устройство для ориентации в пространстве (телескопические очки для слабовидящих) [Беляков К.О., Бушланов Ф.С., Поздняков А.А., Поляков А.Ю., Ширшин В.А. Патент на полезную модель №132721 от 09.01.2009, МПК A61F 9/08. Мобильное устройство для ориентации в пространстве (телескопические очки для слабовидящих)], в котором на каждой линзе очков со стороны глаз закреплены видеокамеры, к которым подключены микронаушники. В корпусе очков расположен составной вычислительный блок, включающий основной вычислительный модуль, помощью которого выполняют расчет карты глубины (2D+Z), и определяют расстояние до всех точек на видеоизображении и преобразователь. Составной вычислительный модуль соединен с источником питания. Технический результат - улучшение точности определения расстояния и распознавания характеристик близкорасположенных объектов цвета/яркости, расстояния до объектов.
К недостаткам данного способа следует отнести невозможность позиционирования пользователя по отношению к месту, где он в данный момент находится.
Заявляемое изобретение направлено на обеспечение возможности определения местоположения пользователя, оборудованного радаром-считывателем данных с радиочастотных меток, расположенных на стенах, полах, потолках, лестницах и других искусственных объектах и объектах неживой природы, на которых могут быть установлены и зафиксированы эти метки внутри и снаружи зданий и сооружений, с последующим преобразованием информации в голосовой сигнал. При этом координаты меток заранее определены путем назначения уникальных кодов, связанных с их положением относительно стен, коридоров, поворотов, подъемов и спусков, дверей, ступенек, лестниц, лифтов, туалетов, спортзалов, столовых, кафе и ресторанов, библиотек и других имеющихся внутри зданий и сооружений нумерованных и ненумерованных, а также поименованных и непоименованных помещений и объектов.
Технический результат достигается тем, что на стенах, полах и потолках коридоров, поворотах, подъемах и спусках, дверях, ступеньках, лестницах, лифтах, туалетах, спортзалах, столовых, кафе и ресторанах, библиотеках и других имеющихся внутри зданий и сооружений, нумерованных и ненумерованных, а также поименованных и непоименованных помещениях и искусственных объектах, а также объектах живой (например, комнатные растения) и неживой природы (например, наглядные пособия), установлены радиочастотные метки, имеющие код, отражающий их уникальное местоположение относительно вышеуказанного объекта или нескольких объектов сразу. При этом пользователь имеет в распоряжении радар-считыватель информации с меток, который передает ее на сравнивающее устройство, сопоставляющее поступившие данные с имеющимся набором данных, который содержит информацию по каждой из меток, расположенных в здании или сооружении. После нахождения аналога в наборе данных воспроизводится соответствующий этим данным предварительно записанный аудиофайл.
Технический результат заключается в обеспечении навигационного обслуживания в зоне, содержащей радиочастотные метки, в условиях обеспечения высокочастотной и иной радиосвязи в направлении от движущегося или неподвижного пользователя к метке при произвольных траекториях его движения внутри здания и/или сооружения.
Отличительными признаками предлагаемого способа является то, что радиочастотные метки устанавливаются на стенах, полах и потолках коридоров, поворотах, подъемах и спусках, дверях, ступеньках, лестницах, лифтах, туалетах, спортзалах, столовых, кафе и ресторанах, библиотеках и других имеющихся внутри зданий и сооружений, нумерованных и ненумерованных, а также поименованных и непоименованных помещениях и искусственных объектах, а также объектах живой (например, комнатные растения) и неживой природы (например, наглядные пособия), которые имеют код, отражающий их уникальное местоположение относительно вышеуказанного объекта или нескольких объектов сразу. При этом координаты меток содержат информацию по положению пользователя относительно вышеперечисленных объектов - расстояние, устанавливаемое радаром-считывателем на основании запаздывания сигнала, приходящего от радиочастотной метки, и/или эффекта Доплера, а также возможные направления последующего движения (прямо, назад, налево, направо, вниз, вверх). Прокладывание маршрута движения пользователя осуществляется выбором направления движения от установленной метки к ближайшей следующей, находящейся в выбранном направлении. Точность позиционирования объекта определяется расстоянием от него до ближайшей к нему метки и плотностью таких меток на объектах, рядом с выбранным. Информация о местоположении пользователя выводится в виде аудиофайла, содержащего данные о местоположении объекта здания или сооружения с установленной на нем и идентифицированной радаром-считывателем меткой, а также расстояния от пользователя до объекта с меткой, при этом каждой метке соответствует свой аудиофайл.
Сущность: метки играют роль опорных точек, учитывающих информацию о стенах, коридорах, поворотах, подъемах и спусках, дверях, ступеньках, лестницах, лифтах, туалетах, спортзалах, столовых, кафе и ресторанах, библиотеках и других имеющихся внутри зданий и сооружений нумерованных и ненумерованных, а также поименованных и непоименованных помещениях и искусственных объектах, а также объектах живой и неживой природы, относительно которых происходит позиционирование пользователя.
Предлагаемый способ позиционирования пользователя внутри зданий и сооружений обладает высокой точностью, поскольку координаты метки, независимо от ее расположения, назначаются относительно определенного объекта здания и сооружения (лестницы, поворота, двери и пр.), и определяются радаром-считывателем на основании запаздывания сигнала, приходящего от радиочастотной метки, и/или эффекта Доплера. При этом, каждая метка имеет признак наследования информации от близлежащих к ней меток и объектов, на которых они установлены, например, о повороте или подъеме по лестнице.
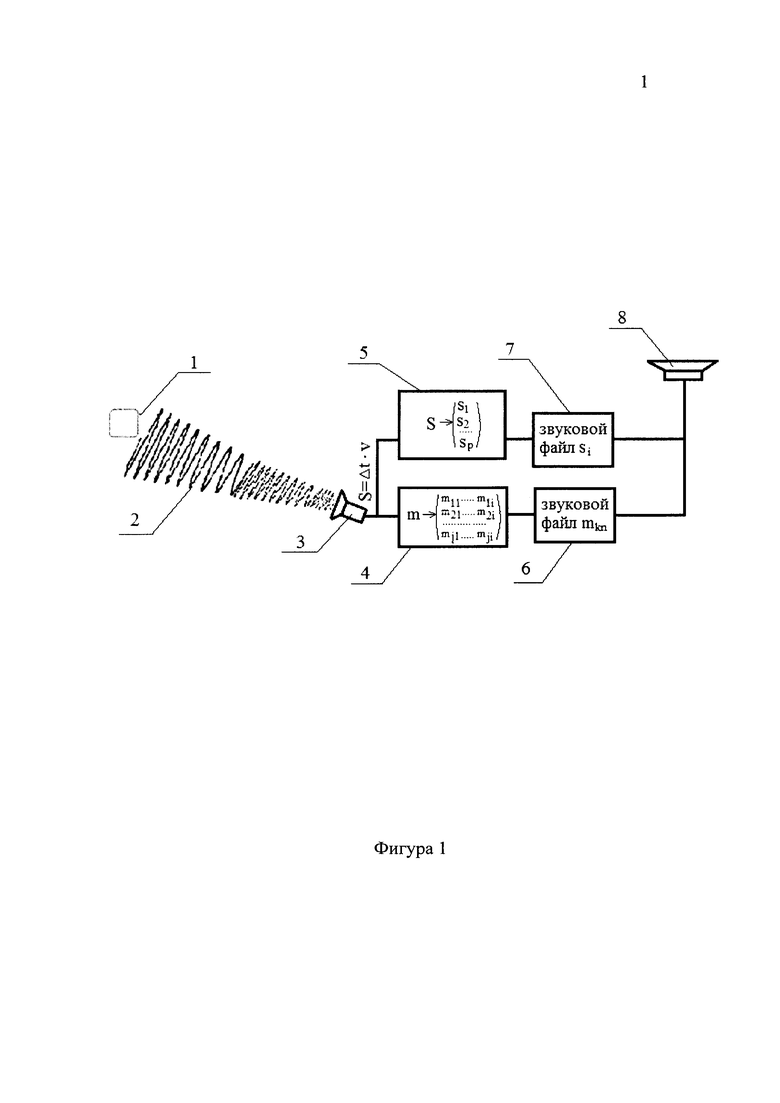
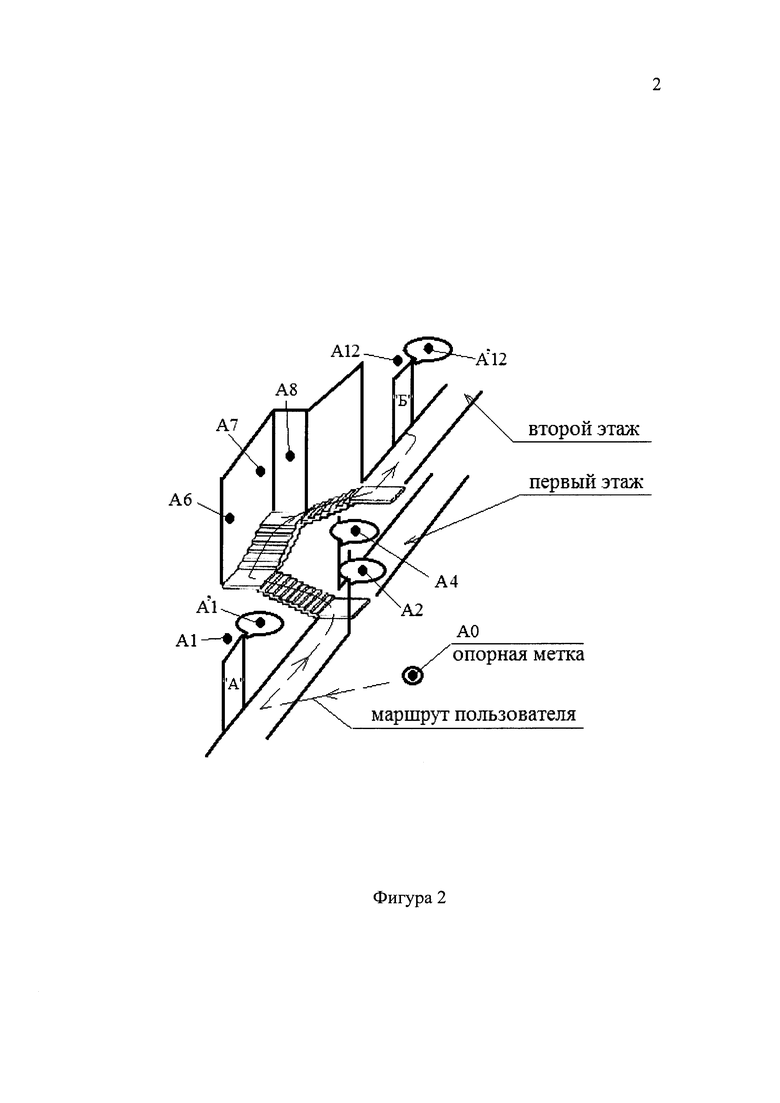
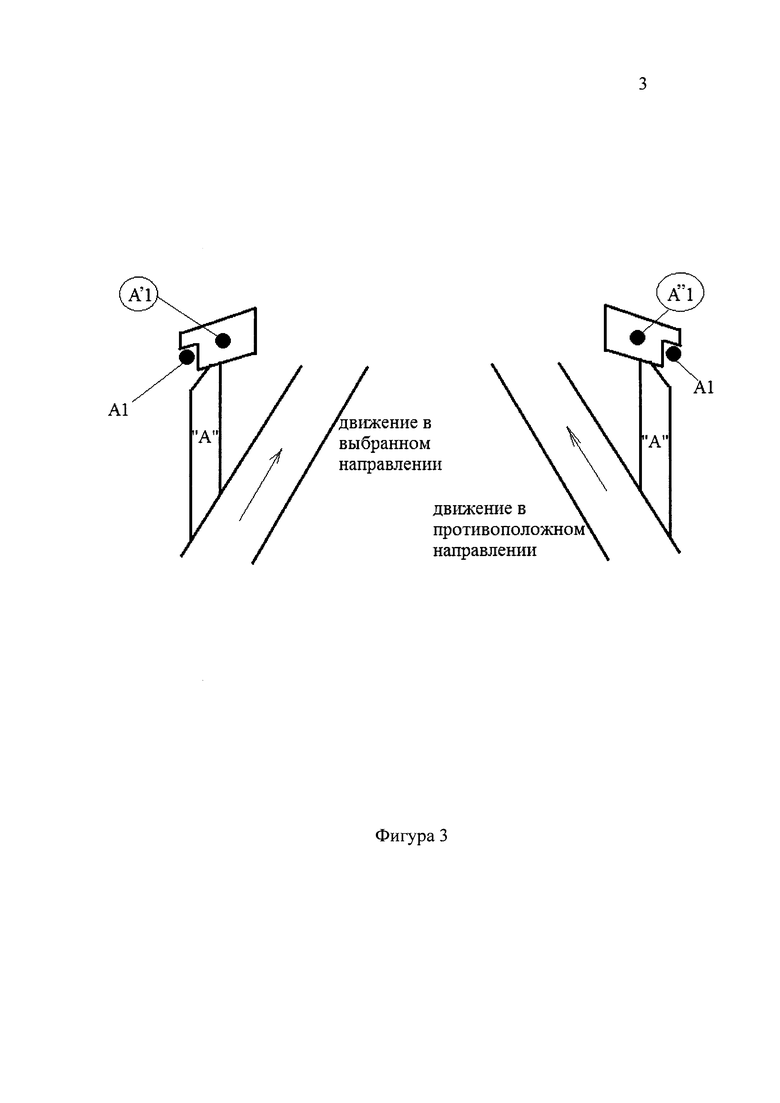
Изобретение поясняется прилагаемыми рисунками, где на фиг. 1 представлена общая схема функционирования; на фиг. 2 - пример поиска маршрута, на фиг. 3 - расположение меток на консоли и их видимость для радара-считывателя при движении пользователя в двух противоположных направлениях по одному и тому же коридору здания.
На фиг. 1 введены следующие обозначения:
1 - радиочастотная метка;
2 - сигнал опроса (радиоволны);
3 - радар-считыватель информации узконаправленного действия;
4 - устройство идентификации метки;
5 - устройство идентификации расстояния;
6 - устройство выбора аудиофайла позиционирования;
7 - устройство выбора аудиофайла расстояния;
8 - устройство воспроизведения аудиофайлов.
Пояснения к фиг. 2:
А0 - опорная метка 1, имеющая вспомогательную метку А'0, располагающуюся на обратной стороне консоли;
А1-А12 - радиочастотные метки 1, при этом:
- метки А1 и А12, расположенные над дверными проемами, имеют вспомогательные метки А'1 и А'12, закрепленные с одной стороны на консолях, выступающих над дверными проемами, перпендикулярно коридору, и вспомогательные метки А”1 и А”12, закрепленные на противоположной (обратной) стороне консоли;
- метки А2 и А4 расположены перед лестницей и после нее на консолях, выступающих из стены коридора перпендикулярно ему;
- метка A3 (на схеме не показана) находится на стене коридора, перпендикулярной первому маршу лестницы;
- метка А5 (на схеме не показана) расположена на левой стене площадки между первым и вторым маршами лестницы;
- метка А9 (на схеме не показана) расположена на выходе с третьего марша лестницы в коридор второго этажа на стене коридора, перпендикулярной маршу;
- метки А10 и A11 (на схеме не показаны) расположены на втором этаже здания аналогично меткам А2 и А4, соответственно;
- метки А6-А8 закреплены на стенах площадок между маршами лестницы;
- метки А2 и А4, а также А10 и A11 имеют вспомогательные метки А'2, А'4, А'10, А'11, расположенные на обратной стороне консоли;
«А» - исходный пункт маршрута пользователя;
«Б» - конечный пункт маршрута пользователя.
Пояснения к фиг. 3:
- метки А'1 видимы для радара-считывателя при движении пользователя по коридору здания в одном направлении (например, направо) относительно помещения, обозначенного как «А»;
- метки А”1 видимы для радара-считывателя при движении пользователя по коридору здания в противоположном исходному направлению (налево) - относительно того же помещения «А».
Заявляемый способ может быть реализован с помощью устройства (фиг. 1), состоящего из радиочастотной метки 1 (например, RFID), установленной на объекте здания или сооружения (стена, дверь, пол, потолок, лестница и др.), и опрашиваемой сигналом 2 радара-считывателя 3, выход которого соединен с входом устройства 4 идентификации метки 1, а также входом устройства 5 идентификации расстояния до метки 1. При этом, выход устройства 4 идентификации метки 1 соединен с входом устройства 6 выбора аудиофайла позиционирования, а выход устройства 5 идентификации расстояния - с входом устройства 7 выбора аудиофайла расстояния, причем выходы устройств 6 и 7 соединены с входом устройства 8 воспроизведения аудиофайлов (например, динамиком и/или наушниками).
Метка 1, установленная на входе в здание или сооружение (на схеме не показана), содержит информацию о расположении и количестве входных дверей, а также способу их отрывания («от себя», «на себя», автоматические двери, турникеты и пр.). Кроме того, она содержит информацию о расположение холла и находящихся в нем объектов (охрана - справа, банкоматы - рядом с дверью, гардероб - прямо и т.д.) и рекомендации по поиску меток 1 на объектах внутри здания, включая опорную метку 1, с которой начинается позиционирование пользователя.
Опорная метка 1 внутри здания или сооружения содержит дополнительную информацию о том, что именно она опорная, и с нее необходимо начинать позиционирование. Расположение всех последующих меток 1 внутри здания или сооружения зависит от их планировки.
Метки 1 располагаются на расстоянии друг от друга не более 10 м, что определено зоной уверенной идентификации при применении пассивных радиочастотных меток (при необходимости могут быть использованы активные метки с диапазоном идентификации до 100 м). Метки 1, описывающие маршрут, проходящий через лестницу, указывают направление лестницы (вправо, влево, вверх, вниз), тип лестницы (угол подъема лестницы, конструкция лестничных элементов, планировка лестницы в пределах одного этажа, наличие подступенка) и количество ступенек на каждом марше.
Метки 1 располагаются на стенах коридора над дверными проемами, а также над помещениями и перед дверями и площадками - на дополнительных выносных панелях-консолях, расположенных перпендикулярно коридору. При этом, метки 1, расположенные на консолях - помимо идентификации помещения - содержат информацию по направлению движения по коридору к следующей метке 1 и/или объекту здания, на котором такая метка (метки) установлена. Кроме того, метки 1 располагаются перед лестницей и после нее, а также на стенах площадок между маршами лестницы - перпендикулярно направлению движения пользователя. Консоли непроницаемы для радиоволн 2, излучаемых радаром-считывателем 3, при этом на обеих сторонах консоли установлены различные метки 1, позволяющие осуществлять навигацию в обоих направлениях движения пользователя по коридору здания.
Устройство 4 идентификации метки содержит набор (матрицу) меток 1 mij, каждая из которых соответствует конкретному объекту здания - двери, лестнице, лифту и пр. При этом каждая метка из набора mij имеет аналог, представленный в виде аудиофайла, находящегося в устройстве 6 выбора аудиофайла позиционирования.
Устройство 5 идентификации расстояния до выбранной метки 1 содержит набор (матрицу) расстояний Sp, содержащий 21 элемент: от 0 м до 10 м c шагом 0,5 м (шаг выбран из соображений среднего шага женщины - 0,67 м (http://tehtab.ru/Guide/Engineers/HumanBeing/StepMiddle/)). Каждая метка из набора Sp имеет аналог, представленный в виде аудиофайла, находящегося в устройстве 7 выбора аудиофайла расстояния.
Аудиофайлы с устройств 6 и 7 выводятся на устройство 8 воспроизведения аудиофайлов в приоритетности - сначала «расстояние» (с устройства 7), затем «информация о позиционировании» (с устройства 6).
Для удобства устройство позиционирования может быть выполнено, например, на пистолетной рукоятке (аналогично считывателю штрих-кода) либо интегрировано в ручку трости.
Примеры конкретного выполнения. Работа устройства осуществляется следующим образом. При входе в здание пользователь активизирует устройство для позиционирования и осуществляет поиск ближайших к нему меток 1, проводя устройством вправо-влево и вверх-вниз. При включении устройства радар-считыватель 3 посылает сигналы опроса 2 в окружающее пространство. Находя метки 1, расположенные на объектах в здании, радар-считыватель 3 оценивает время запаздывания сигнала Δt, приходящего от метки 1, и вычисляет расстояние до нее, например, по формуле S=Δt⋅v (v - скорость распространения электромагнитной волны). Вычисленная величина S передается с выхода радара-считывателя 3 на вход устройства 5 идентификации расстояния, где сопоставляется с набором Sp, из которого выбирается значение Si, ближайшее к вычисленному S. Найденное значение передается с выхода устройства 5 идентификации расстояния на вход устройства 7 выбора аудиофайла расстояния, где находится аудиофайл с аналогичными данными Si. Выбранный аудиофайл воспроизводится через устройство 8 воспроизведения аудиофайлов. Таким образом, пользователь получает информацию о расстоянии до найденной метки 1 с точностью до |S-Si| в м.
Одновременно вышеуказанному процессу запускается процесс идентификации меток 1, находящихся в зоне досягаемости радиоизлучения 2 радара-считывателя 3, с целью нахождения опорной метки, относительно которой начинается позиционирование пользователя. Поэтому после получения сообщения о расстоянии до идентифицированной метки 1 пользователь получает информацию о том, что это за метка следующим образом. Информация с выхода радара-считывателя 3 поступает в виде уникального кода (обычно RFID метки имеют 128-битную разрядность) на вход устройства 4 идентификации метки, где сопоставляется с набором mij, из которого выбирается значение, точное соответствующее поступившему коду. Далее сигнал с выхода устройства 4 идентификации метки подается на вход устройства 6 выбора аудиофайла позиционирования, где находится аудиофайл с аналогичными данными mij, который и выбирается для передачи на вход устройства 8 воспроизведения аудиофайлов. После чего устройство 8 воспроизведения аудиофайлов воспроизводит выбранный аудиофайл для пользователя, например, через динамик или наушники. Если информация о позиционировании однажды воспроизведена, то по мере сокращения или увеличения расстояния от пользователя до метки 1 будет воспроизводиться только информация о расстоянии. Если есть необходимость еще раз прослушать информацию о местоположении и принять решение о выборе маршрута, то следует отключить и снова включить устройство позиционирования, например, переключателем (на схеме не показан) - это можно сделать неограниченное количество раз.
Предположим, что здание имеет два этажа коридорного типа с расположенными по его бокам помещениями, и одну трехмаршевую лестницу, соединяющую эти этажи (фиг. 2). Пользователю необходимо переместиться от входа в здание до точки «А» первого этажа и, далее, до помещения «Б» второго этажа.
Сканируя окружающее пространство, пользователь находит опорную метку 1 и минимизирует расстояние до 0,5-1 м, последовательно приближаясь к ней, покачивая радаром-считывателем узконаправленного действия в выбранном направлении. После ее нахождения пользователь прослушает информацию, например, такого характера «Вы нашли опорную метку. Прослушайте краткую информацию о схеме здания. Здание двухэтажное. На первом этаже находятся …(следует перечисление служб и помещений). Коридор прямой, без ступенек. Справа по коридору расположена лестница, ведущая на второй этаж. На втором этаже находятся ……(следует перечисление служб и помещений). После максимального сближения с опорной точкой просканируйте пространство прямо перед Вами и найдите метку А1 - до нее приблизительно 6 м. Метка А1 расположена над помещением «А». Дальнейшее позиционирование осуществляйте относительно этой метки».
Пользователь начинает сканировать окружающее пространство в указанном направлении, пытаясь найти метку А1. После нахождения метки А1 и получения информации о расстоянии до нее пользователь - в процессе сближения с меткой - прослушает следующую информацию «Вы находитесь рядом с помещением «А», в котором располагается …(указывается, что за служба располагается в помещении). Справа и слева от Вас находится прямой коридор. Близлежащим помещением справа, приблизительно в четырех метрах по коридору, является …(указывается, что за служба там располагается). Близлежащим помещением слева, в трех метрах по коридору, - …(указывается, что за служба там располагается). Лестница на второй этаж располагается справа по коридору, приблизительно в двадцати метрах».
Поскольку пользователю необходимо помещение «Б», находящееся на втором этаже здания, то он поворачивает направо по коридору, и сканирует окружающее пространство, отыскивая близлежащие метки 1. Следующей обнаруженной радаром-считывателем 3 будет метка А2. По мере приближения к ней пользователь прослушает следующую информацию «Вы приближаетесь к входу на второй этаж. Через 2 м после максимального сближения поверните налево на лестницу, ведущую вверх. Лестница трехмаршевая с правым поворотом на площадках между маршами. Первый марш содержит 10 ступенек. Второй марш - 6, третий - 10 ступенек. Лестница оборудована перилами, находящимися по правой стороне».
По мере движения к лестнице (ориентировочно 2 м прямо после метки А2), радар-считыватель 3 пользователя обнаружит метку А4 и, после оценки расстояния до нее, пользователь прослушает сообщение «При дальнейшем движении вперед Вы выйдете из зоны левого поворота на лестницу через … (указывается число, определенное радаром-считывателем 3) метров. Прямо по коридору располагаются помещения … (следует перечисление помещений с указанием слева или справа по коридору они находятся)».
Повернув на лестницу, пользователь сканирует окружающее пространство и находит метку А6, располагающуюся на стене площадки между маршами лестницы. После чего прослушает сообщение «Вы находитесь на первом марше лестницы, ведущей на второй этаж. Количество ступенек марша - 10. На первой площадке поверните направо. Держитесь за перила».
Отсчитав 10 ступенек, пользователь повернет направо и радар-считыватель 3 обнаружит метку А8. После оценки расстояния до нее пользователь прослушает сообщение «Вы находитесь на втором марше лестницы. Количество ступенек марша - 6. На второй площадке поверните направо. Держитесь за перила».
Отсчитав 6 ступенек, пользователь повернет направо и радар-считыватель 3 обнаружит метку А9, находящуюся на стене коридора второго этажа (на схеме не показана). После оценки расстояния до нее пользователь прослушает сообщение «Вы находитесь на третьем марше лестницы. Количество ступенек марша - 10. На последней площадке находится выход в коридор - вправо и влево относительно направления Вашего движения. Справа по коридору располагаются … (следует перечень помещений). Слева по коридору - … (следует перечень помещений). Держитесь за перила».
Поскольку пользователю необходимо найти помещение «Б», то в коридоре он повернет налево и радар-считыватель 3 обнаружит метку 11 (на схеме не показана). Последует сообщение «Вы выходите в коридор к помещениям …(следует перечень помещений с указанием их нахождения - справа или слева по коридору)».
Выйдя в коридор, радар-считыватель обнаружит метку А'12, при этом пользователь услышит информацию о расстоянии до искомого помещения «Б», о том, что дверь в помещение находится слева по коридору, а также какие службы в нем располагаются. По мере приближения к помещению пользователь будет слышать информацию об оставшемся до помещения расстоянии. Таким образом, конечный пункт найден пользователем.
При выходе с лестницы и повороте направо радар-считыватель 3 обнаружил бы метку 10, и пользователь смог бы идентифицировать помещения на втором этаже, расположенные справа по коридору.
Обратный маршрут пользователя проходит по меткам А'11-А'10-А7-А5-А3-А'2-А”1-А'0. При этом, метки А'11, А'10 и А'2, содержат информацию о поворотах на площадках перед лестницей и ориентацией при выходе с нее в коридор (А'11, А'10 - второго этажа, А'2 - первого этажа). Метки А7 и А5 содержат информацию об ориентации на маршах и площадках между маршами лестницы. Метка A3 - об ориентации при выходе с лестницы в коридор первого этажа. А”1 - об ориентации относительно помещения «А» и вспомогательной опорной метки А'0. А'0 - об ориентации пользователя относительно выхода из здания или сооружения.
Заявляемое устройство позволяет позиционировать пользователя внутри здания или сооружения с точностью до 0,5 м и достигать любую точку здания из любой точки, в которой он находится. При этом радары не существенно загрязняют электромагнитным излучением окружающую среду, поскольку могут работать в импульсном режиме с паузой, которая зависит от пользователя.
Изобретение относится к области ориентирования в замкнутом пространстве. Техническим результатом является повышение точности определения местоположения пользователя. В способе исходное позиционирование осуществляется относительно опорной RFID-метки здания, содержащей информацию о структуре и планировке здания, с указанием всех направлений возможного перемещения внутри здания от опорной RFID-метки, причем каждая из RFID-меток, содержит указание на направление движения до ближайших, следующих за ней, во всех возможных в данной точке здания направлениях - вперед, назад, вправо, влево, вверх и вниз. Идентификация внутреннего объекта здания осуществляется за счет того, что опознанная радаром RFID-метка противопоставляется набору (матрице) меток, каждая из которых соответствует уникальному объекту здания, с последующим выбором из этого набора точного соответствия, а идентификация расстояния осуществляется путем сопоставлением расчетного значения расстояния с набором расстояний, из которого выбирается значение, ближайшее к вычисленному, а RFID-метки находятся вне зоны свободного доступа. 3 ил.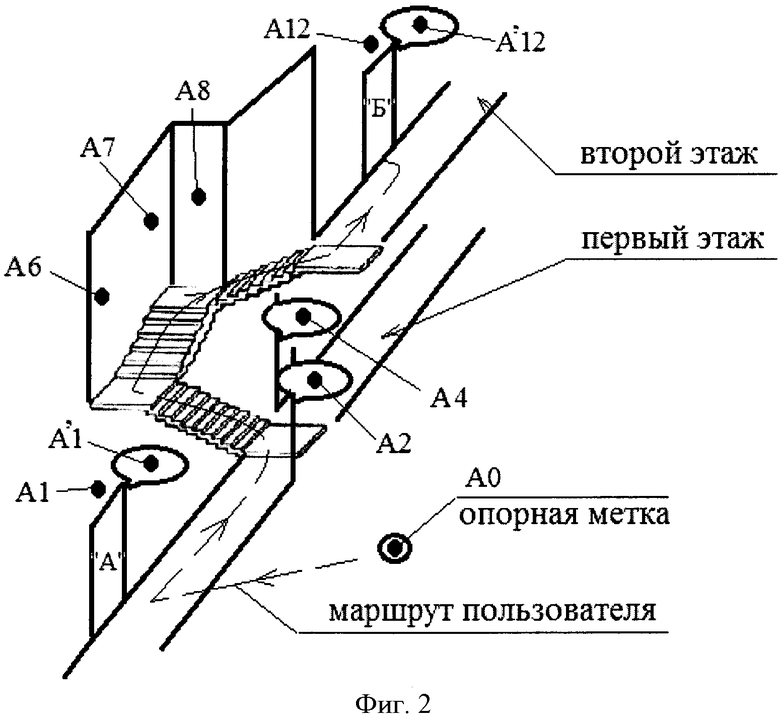
Способ навигации людей с ослабленным зрением в зданиях и сооружениях, оборудованных носителями информации, выполненными на RFID-метках, системой приема-передачи данных на основе радара, подключенной к устройству обработки информации и ее воспроизведения, отличающийся тем, что исходное позиционирование осуществляется относительно опорной RFID-метки здания, которая содержит информацию о структуре и планировке здания, расположении подразделений организации/организаций и мест общего пользования с указанием всех направлений возможного перемещения внутри здания от опорной RFID-метки, а любое последующее позиционирование - относительно RFID-меток, координаты которых отражают их уникальное местоположение относительно объекта или нескольких объектов сразу, при этом каждая из RFID-меток содержит указание на направление движения до ближайших, следующих за ней, во всех возможных в данной точке здания направлениях - вперед, назад, вправо, влево, вверх и вниз, а также их сочетаний и вариаций, идентификация внутреннего объекта здания осуществляется при этом за счет того, что опознанная радаром RFID-метка противопоставляется набору (матрице) меток, каждая из которых соответствует уникальному объекту здания, с последующим выбором из этого набора точного соответствия, а идентификации расстояния осуществляется путем сопоставлением расчетного значения расстояния с набором расстояний, из которого выбирается значение, ближайшее к вычисленному, а RFID-метки находятся вне зоны свободного доступа, что исключает умышленную и неумышленную их подмену и вандализм, а также исключены системы глобального позиционирования и локального компьютерного позиционирования в здании.
| US20060129308 A1, 15.06.2006 | |||
| CN105674979 A, 15.06.2016 | |||
| СИСТЕМА ОРИЕНТИРОВАНИЯ, НАВИГАЦИИ И ИНФОРМАЦИИ, СПЕЦИАЛЬНО АДАПТИРОВАННАЯ ДЛЯ СЛЕПЫХ ИЛИ ЛЮДЕЙ С ОГРАНИЧЕННЫМИ ЗРИТЕЛЬНЫМИ ВОЗМОЖНОСТЯМИ | 2009 |
|
RU2490694C2 |
| СИСТЕМА ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ С НАРУШЕНИЕМ ЗРИТЕЛЬНЫХ ФУНКЦИЙ | 2005 |
|
RU2299052C2 |

