Изобретение относится к способам определения позиционирования объектов на основе радиочастотной идентификации и может применяться для идентификации и локального позиционирования носимых активных меток [H04W64/00, H04B5/00, G08C17/00, G01S13/75].
Из уровня техники известно УСТРОЙСТВО И СИСТЕМА ДЛЯ КОНТРОЛЯ ОБЪЕКТОВ [RU2734099, опубл. 13.10.2020]. Портативное устройство для контроля объекта, содержащее в едином корпусе:
- блок определения местоположения, выполненный с возможностью определения координат, соответствующих местоположению данного устройства, с помощью локальной системы позиционирования в пределах охваченной ей области;
- набор датчиков, выполненных с возможностью регистрации параметров данного устройства, параметров контролируемого объекта и/или параметров окружающей среды;
- блок связи, выполненный с возможностью осуществления связи с целевой информационной системой и с соседними устройствами; и
- блок управления, выполненный с возможностью:
получения, от блока определения местоположения, информации о местоположении данного устройства, получения, от набора датчиков и через блок связи от соседних устройств, параметров данного устройства, параметров контролируемого объекта и/или параметров окружающей среды, обработки полученных параметров и информации о местоположении данного устройства, и отправки через блок связи в целевую информационную систему информации о местоположении данного устройства и информации о результатах обработки.
Недостатком аналога является высокая техническая сложность, из-за большого заявленного функционала аналога, а именно: определения ускорения объекта, датчик пульса, алкотестестера и т.д., что требует корректного функционирования во взаимоувязке большого количества аппаратных, аппаратно-программных и программных элементов.
Также из уровня техники известна СИСТЕМА И МЕТОДЫ ЛОКАЦИОНИРОВАНИЯ RFID [US2021199794, опубл. 01.07.2021]. Способ определения местоположения меток радиочастотной идентификации (RFID) в определенном месте в комнате, включающий: передачу радиочастотного (РЧ) сигнала от считывателя RFID в первом месте; передачу РЧ-сигнала от указанного считывателя RFID во втором месте;
передают РЧ-сигнал от указанного считывателя RFID в третьем месте, причем первое, второе и третье местоположения являются разными местоположениями; прием сигнала, отраженного от метки, из РЧ-сигнала, переданного считывателем RFID в каждом из местоположений; а также извлечение по меньшей мере одного параметра положения из сигнала, обратно рассеянного от метки и принятого считывателем RFID в каждом из первого, второго и третьего местоположений; при этом пользователь направляется к местоположению метки в комнате с использованием параметров положения, извлеченных из каждого сигнала, обратно рассеянного меткой.
Недостатком аналога является необходимость наличия, как минимум трех считывателей, для получения достоверной информации об объекте позиционирования, что влечет за собой ограниченность применения такой системы и высокую сложность алгоритмов обработки информации.
Наиболее близкой по технической сущности является СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ (RFID) И МЕТОДЫ ОБНАРУЖЕНИЯ ОДНОГО ИЛИ НЕСКОЛЬКИХ ПРЕДМЕТОВ, РАСПОЛОЖЕННЫХ В ОПРЕДЕЛЕННОМ ПРОСТРАНСТВЕ [WO2021252214, опубл. 16.12.2021]. В техническом решении раскрыты система и способы определения местоположения радиочастотной идентификации (RFID) для определения местоположения одного или нескольких предметов, расположенных в пределах определенного пространства. Вариант реализации технического решения включает подачу питания с помощью считывателя RFID, имеющего антенну RFID, на метку RFID, соответствующую предмету, расположенному в пределах определенного пространства. Идентификацию уровней мощностей от первого и второго сигналов первым узлом-приемником RFID канала первого узла и вторым узлом-приемником RFID второго канала узла. Контроллер осуществляет одновременное мультиплексирование для приема данных об уровне первого сигнала от первого узла приемника RFID и данных об уровне второго сигнала от второго узла приемника RFID.
Основной технической проблемой прототипа является низкая точность определения позиционирования объектов, из-за того, что прототипом предусмотрена идентификация объектов только по их статическим параметрам. Техническое решение прототипа не учитывает возможность сравнения параметров сигнала, поступаемых от радиочастотной метки - во времени, что ведет к невозможности определения направления движения объектов позиционирования в зоне действия считывателей.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение точности определения позиционирования объектов.
Указанный технический результат достигается за счет того, что способ определения позиционирования персонала в зданиях посредством радиочастотных меток, характеризующийся тем, что:
при появлении радиочастотной метки в зоне действия считывателя, осуществляют передачу через заданные интервалы времени, посредством радиоканала, сигналов в виде кода идентификатора радиочастотной метки считывателю, который расположен в помещении здания, и оснащён селектором уровней сигналов меток и устройством анализа производной уровней сигнала метки; посредством селектора уровней сигналов меток выполняют анализ уровня поступившего сигнала, в ходе которого осуществляют сравнение уровня поступившего сигнала с первым пороговым значением, причем значение первого порогового уровня сигнала задают как среднее значение между минимальным значением уровня сигнала от радиочастотной метки, находящейся в помещении на максимальном удалении от считывателя и максимальным уровнем сигнала от радиочастотной метки, находящейся в смежном помещении;
одновременно с этим, посредством устройства анализа производной уровней сигнала метки, считывают уровни сигналов через дискретные промежутки времени и в каждый дискретный момент времени формируют значение приращения уровня сигнала посредством вычитания текущего значения уровня сигнала от предыдущего, и сравнивают положительное приращение уровня сигнала со вторым пороговым уровнем, значение которого определяется опытным путем, и выбирается исходя из того, что при выходе или
входе пользователя с меткой в помещение - приращение сигнала было больше второго порогового уровня, а при нахождении пользователя с меткой внутри помещения – значение уровня сигнала было меньше второго порогового уровня; результаты сравнения с первым пороговым уровнем и вторым пороговым уровнем передают посредством информационного сигнала по радиоканалу в шлюз, и далее на сервер и терминальное устройство, где визуализируют позиционирование радиочастотной метки с учетом статического и динамического сравнения.
Краткое описание чертежей:
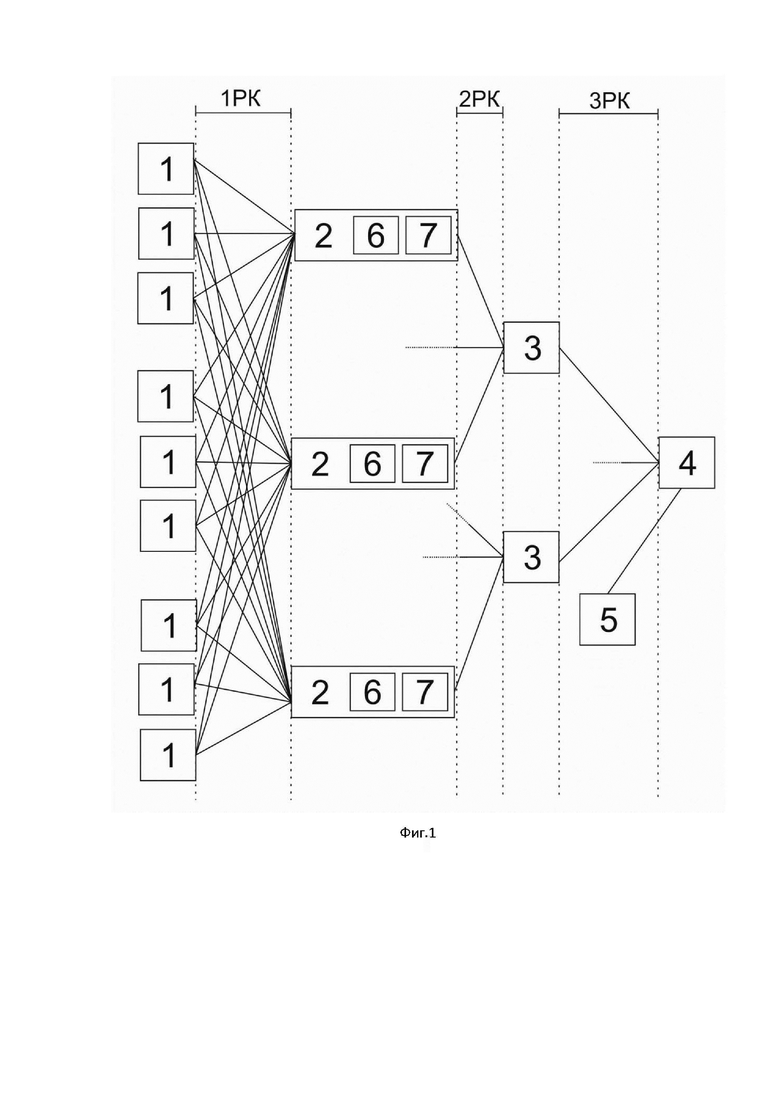
На фиг. 1 показана общая схема системы определения позиционирования персонала в зданиях, посредством радиочастотных меток;
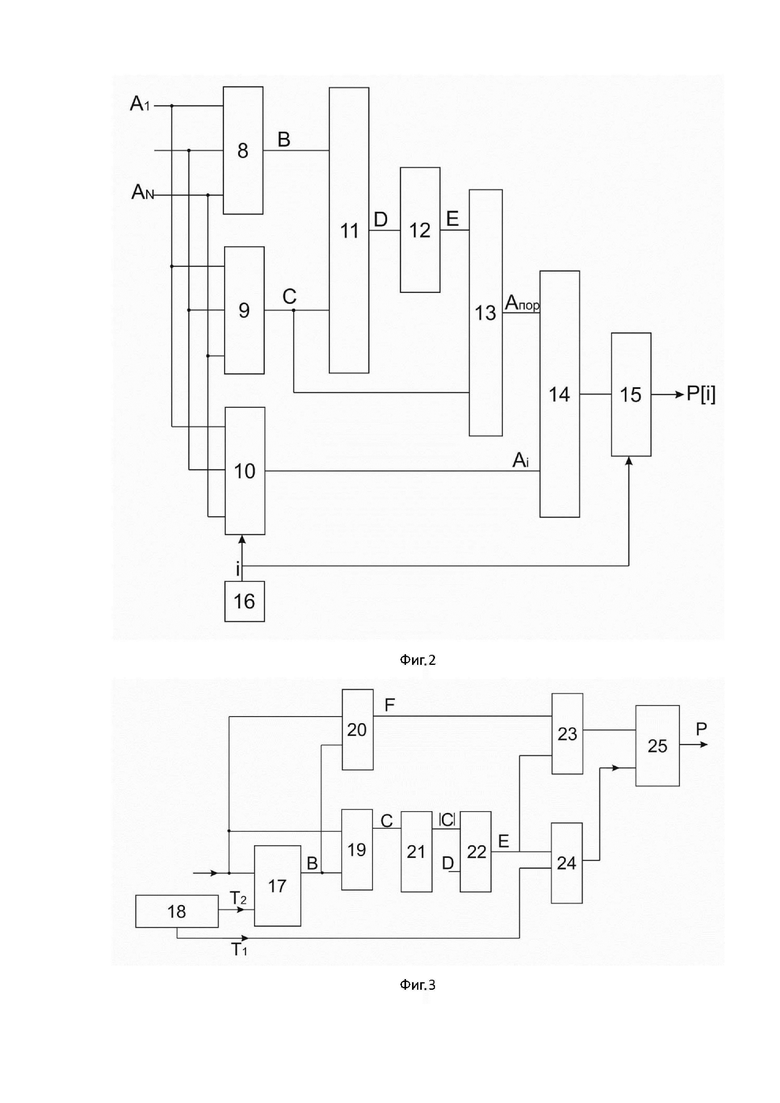
На фиг. 2 показан вариант реализации селектора уровней сигналов меток;
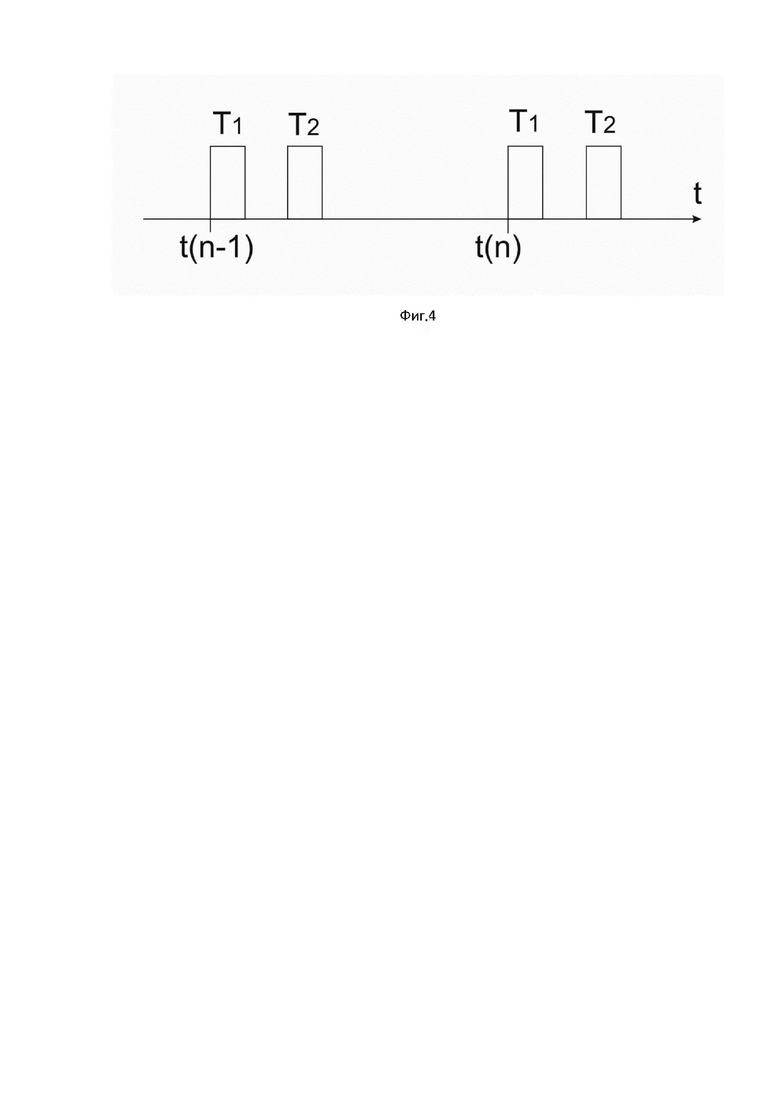
На фиг. 3 показан вариант реализации устройства анализа производной уровней сигнала метки;
На фиг. 4 показана визуализация циклического обновления параметра уровня сигнала метки устройства анализа производной уровней сигнала метки.
На фигурах обозначено: 1 – метка; 2 – считыватель; 3 – шлюз; 4 – сервер; 5 – терминальное устройство; 6 – селектор уровней сигналов меток; 7 – устройство анализа производной уровней сигнала метки; 8 – максиселектор; 9 – миниселектор; 10 – мультиплексор; 11 – вычитатель селектора уровней сигналов; 12 – делитель; 13 –сумматор; 14 – компаратор селектора уровней сигналов; 15 – запоминающее устройство номеров меток принадлежащих классу; 16 – формирователь; 17 – параметрический элемент памяти П1; 18 – синхронизатор; 19 – вычитатель устройства анализа производной уровней сигнала метки; 20 – первый компаратор знака производной; 21 – формирователь модуля; 22 – второй компаратор; 23 – первый логический элемент «И»; 24 – второй логический элемент «И»; 25 – элемент памяти.
Осуществление изобретения
Система определения позиционирования персонала в зданиях посредством радиочастотных меток, реализующая заявленный способ содержит (фиг.1): радиочастотные метки 1, выполненные с возможностью передачи через заданные интервалы времени идентификационных кодов по радиоканалам нижнего уровня (1РК) считывателям 2 (ридерам), которые располагаются в каждом помещении и соединены беспроводными радиоканалами связи среднего уровня (2РК) с шлюзами 3, расположенными на каждом этаже здания и выполненными с возможностью передачи по беспроводным каналам связи сети верхнего уровня (3РК) сообщений о сигналах каждой из меток серверу 4. Сервер 4 выполнен с возможностью приема сообщений, хранения их в базе данных, обработки по алгоритму позиционирования, формирования кадров для передачи через сеть верхнего уровня (3РК) и отображения на дисплее терминального устройства 5 . При этом, считыватель 2 оснащён селектором уровней сигналов меток 6 и устройством анализа производной уровней сигнала метки 7.
Способ определения позиционирования персонала в зданиях посредством радиочастотных меток, характеризующийся тем, что первоначально каждому члену персонала (пользователю) выдают радиочастотные метки 1. В качестве радиочастотных меток 1 могут выступать серийно выпускаемые активные метки 1 с радиоканалом по стандарту Bluetooth. Радиочастотная метка 1 может быть интегрирована в браслет, надевающийся на кисть пользователя.
Далее, при появлении пользователя вблизи одного из считывателей 2, посредством радиоканала Bluetooth, происходит передача кода идентификатора с однокристального микроконтроллера активной радиочастотной метки 1 через микросхему модуля Bluetooth на считыватели 2 посредством радиоканалов нижнего уровня (РК1).
В считывателях 2 радиосигналы от активных радиочастотных меток 1, содержащие код идентификатора метки 1, поступают на селектор уровней сигналов меток 6, где посредством функционирования встроенного приемопередатчика, формируют аналоговый амплитудно-модулированный сигнал, характеризующий уровень радиосигнала. Далее амплитудно-модулированный сигнал посредством аналого-цифрового преобразователя преобразовывается в цифровую форму и далее выполняется анализ уровня поступившего сигнала, путем сравнения его уровня со значением, подаваемым на вход компаратора. Одновременно с этим, считыватели 2, расположенные в соседних помещениях, производят аналогичную процедуру.
Таким образом, считыватели 2, расположенные в каждом помещении здания, принимают сигнал от активной радиочастотной метки 1, и сравнивают его посредством компаратора, с определенным пороговым уровнем (первое пороговое значение) заданным програмно в каждый считыватель 2.
Уровень первого порогового значения, является средним значением от двух величин:
- минимального значения уровня сигнала от метки 1, находящейся в помещении на максимальном удалении от считывателя 2;
- максимального уровня сигнала от метки 1, находящейся в смежном помещении.
Задание уровня первого порогового значения таким образом, обеспечивает однозначность определения метки 1 одним из считывателей 2 расположенных в смежных помещениях.
В случае если амплитуда принимаемого сигнала больше первого порогового значения, на выходе компаратора, в виде кода, формируется логическая «1», в противоположном случае на выходе компаратора формируется логический «0».
Таким образом, селектор уровней сигналов метки 6 обеспечивает статическое сравнение уровня сигнала с первым пороговым уровнем.
Одновременно с функционированием селектора уровней сигналов меток 6 осуществляют функционирование устройства анализа производной уровней сигнала метки 7, которое функционирует циклично, считывая через дискретные промежутки времени сигнал с активной радиочастотной метки 1. В каждый дискретный момент времени устройство анализа производной уровней сигнала метки 7 осуществляет вычитание текущего значения уровня сигнала от предыдущего, формируя, тем самым приращение уровня сигнала. Далее, каждый считыватель 2 сравнивает положительное приращение уровня сигнала со вторым пороговым уровнем. Второй пороговый уровень выбирается исходя из того, чтобы при выходе или входе пользователя с меткой 1 в помещение - приращение сигнала было больше второго порогового уровня, а при нахождении пользователя с меткой 1 внутри помещения – значение уровня сигнала было меньше второго порогового уровня. Значение второго порогового уровня определяется опытным путем и зависит от геометрии помещения, его размеров, средней скорости движения пользователя с меткой 1 и других факторов.
Таким образом, устройство анализа производной уровней сигнала метки 7 обеспечивает динамическое сравнение приращения уровня сигнала со вторым пороговым уровнем.
Далее на выходе считывателя 2 формируется информационный сигнал, характеризующий, в том числе, позиционирование метки 1 по результатам статического и динамического сравнения с первым и вторым пороговыми уровнями сигналов, в соответствии с чем считыватель 2 осуществляет процедуру селективного позиционирования пользователя с радиочастотной меткой 1.
Возможны следующие варианты селективного позиционирования пользователя по результатам статического и динамического сравнения:
- значение уровня радиосигнала, полученного с метки 1, больше значения первого порогового уровня; значение приращения меньше второго порогового уровня – пользователь находится в помещении;
- значение уровня радиосигнала, полученного с метки 1, больше значения первого порогового уровня; значение приращения больше второго порогового уровня – пользователь двигается к выходу из помещения;
- значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения больше второго порогового уровня – пользователь двигается к входу в помещение;
- значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения меньше второго порогового уровня – пользователь позиционируется вне помещения.
Далее информационные сигналы (включающие коды идентификатора меток, данные об их селективном позиционировании и время фиксации сигнала) со считывателей 2 передают посредством встроенного модуля ZigBee по радиоканалам среднего уровня (РК2) в шлюзы 3. При этом, шлюзы 3 располагаются на каждом этаже здания, в котором реализуется способ определения позиционирования персонала. В шлюзах 3 осуществляется сбор и передача данных от считывателей 2.
Далее информационные сигналы поступает по радиоканалу верхнего (РК3) уровня на сервер 4. На сервере 4 осуществляют прием информации от шлюза 3, занесение и хранение поступившей информации в базу данных и ее обработку по алгоритму позиционирования. Далее сервер 4 формирует кадры для дальнейшей передачи. Далее информация о идентификации пользователя радиочастотной метки 1 обрабатывается и поступает на терминальное устройство 5, например посредством беспроводной сети Internet. На терминальном устройстве 5, посредством элемента визуализации (например, экрана монитора или планшета) осуществляется отображение информации через элементы интерфейса о позиционировании пользователя активной радиочастотной метки 1 с учетом статического динамического сравнения, а именно, визуализируют позиционирование пользователя с учетом его текущего положения и направления движения.
Технический результат изобретения – повышение точности определения позиционирования объектов, в качестве которых выступает персонала в зданиях – достигается за счет того, что в соответствии с описанием, в заявленном техническом решении обеспечивается селективное позиционирование пользователя по результатам как статического, так и динамического сравнения. Таким образом, на основе анализа, как уровня сигнала с метки 1 пользователя, так и его изменения во времени, можно точно определить не только присутствие или отсутствие пользователя в каком то конкретном помещении, но и точно сделать вывод о его характере движения в помещение или из помещения. Также заявленный технический результат достигается за счет того, что значение первого порогового уровня сигнала задают как среднее значение между минимальным значением уровня сигнала от радиочастотной метки 1, находящейся в помещении на максимальном удалении от считывателя и максимальным уровнем сигнала от радиочастотной метки 1, находящейся в смежном помещении, что обеспечивает однозначность определения метки 1 одним из считывателей 2 расположенных в смежных помещениях, что также повышает точность определения позиционирования объекта с меткой 1.
Наиболее значимое повышение точности определения позиционирования персонала в зданиях, наблюдается в условиях неоднородности среды распространения электромагнитных волн, например, при прохождении через стены и перекрытия здания.
Пример достижения технического результата.
Рассмотрим функционирование двух считывателей 2, расположенных в смежных, расположенных друг за другом помещениях, при этом первое помещение (оснащенное первым считывателем 2) располагается сразу за входом и далее по коридору располагается второе помещение (оснащенное вторым считывателем 2).
В то время, когда пользователь не вошел в здание:
- первый считыватель 2: значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения меньше второго порогового уровня – пользователь позиционируется вне помещения;
- второй считыватель 2: значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения меньше второго порогового уровня – пользователь позиционируется вне помещения.
Пользователь идет в сторону первого помещения:
- первый считыватель 2: значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения больше второго порогового уровня – позиционирование пользователя, как объекта, движущегося в помещение;
- второй считыватель 2: значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения меньше второго порогового уровня – пользователь позиционируется вне помещения.
Пользователь находится в первом помещении:
- первый считыватель 2: значение уровня радиосигнала, полученного с метки 1, больше значения первого порогового уровня; значение приращения меньше второго порогового уровня – позиционирование пользователя, как объекта, находящегося в помещении;
- второй считыватель 2: значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения меньше второго порогового уровня – пользователь позиционируется вне помещения.
Пользователь двигается из первого помещения во второе:
- первый считыватель 2: значение уровня радиосигнала, полученного с метки 1, больше значения первого порогового уровня; значение приращения больше второго порогового уровня – позиционирование пользователя, как объекта, движущегося из помещения;
- второй считыватель 2: значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения больше второго порогового уровня – позиционирование пользователя, как объекта, движущегося в помещение;
Пользователь находиться во втором помещении:
- первый считыватель 2: значение уровня радиосигнала, полученного с метки 1, меньше значения первого порогового уровня; значение приращения меньше второго порогового уровня – пользователь позиционируется вне помещения.
- второй считыватель 2: значение уровня радиосигнала, полученного с метки 1, больше значения первого порогового уровня; значение приращения меньше второго порогового уровня – позиционирование пользователя, как объекта, находящегося в помещении.
При этом в каждый дискретный момент времени, данные о позиционировании пользователя, с каждого из двух считывателей 2, передаются информационными сигналами через радиоканалы среднего (РК2) и верхнего (РК3) уровней, через шлюзы 3 на сервер 4, с последующим отображением информации о позиционировании пользователя на терминальном устройстве 5.
Таким образом, при отображении информации о позиционировании пользователя на терминальном устройстве 5, учитывается селективное позиционирование пользователя по результатам как статического, так и динамического сравнения, что делает оценку его позиционирования более точным, и позволяет определить не только его местоположение в конкретном помещении здания, но и отследить направление перемещения между помещениями.
Варианты реализации заявленного способа.
В качестве селектора уровней сигналов меток 6 может использоваться следующее техническое решение (фиг.2): устройство, содержащее максиселектор 8, миниселектор 9 ,мультиплексор 10 на входы которых подаются параметры Аi от каждой (i-й) метки 1; с выходов максиселектора 8 и миниселектора 9 значения параметров (В и С) подаются на входы вычитателя 11, а разность D с его выхода – на вход делителя 12 параметра D на константу S; с выходов миниселектора 9 и делителя 12 параметры Е и С подаются на входы сумматора 13, формирующего параметр порога образования класса Апор., который подаётся на инвертирующий вход компаратора 14; на неинвертирующий вход компаратора 14 с выхода мультиплексора 10 подаётся тестируемый параметр Аi; формируемый на выходе компаратора 14 признак принадлежности к классу Р (логическая «1» или «0») сохраняется в запоминающем устройстве номеров меток принадлежащих классу 15; номер метки 1 i генерируется формирователем 16 и подаётся на управляющий вход мультиплексора 10 выбора параметра Аi, а также на адресный вход запоминающего устройства номеров меток принадлежащих классу 15; при переборе номеров меток i от 1 до максимального значения N в запоминающем устройстве формируется массив признаков Р[i] принадлежности меток к классу (помещению).
В качестве устройства анализа производной уровней сигнала метки 7, может использоваться следующее техническое решение (фиг.3): устройство, содержащее параметрический элемент памяти П1 17 на информационный вход которого поступает значение параметра А текущего такта (n), а на управляющий – дискретная команда T2 синхронизатора 18; с выхода параметрического элемента памяти П1 17 параметр отсчёта предыдущего такта В подаётся на вычитаемый вход вычитателя 19 и инвертирующий вход компаратора знака производной 20, а на уменьшаемый вход вычитателя 19 и неинвертирующий вход первого компаратора знака производной 20 подаётся входной параметр уровня сигнала метки 1 А; с выхода вычитателя 19 параметр С=А-В поступает на вход формирователя модуля 21, а с его выхода параметр |C| передаётся на неинвертирующий вход второго компаратора 22; на инвертирующий вход второго компаратора 22 подаётся пороговый параметр D; с выходов первого компаратора знака производной 20 и второго компаратора 22 дискретные сигналы F и E подаются на входы первого логического элемента «И» 23 выходной сигнал G которого, по управляющей команде синхронизатора 18 Т1, актуализируемой вторым логическим элементом «И» 24 при Е=1, записывается в элемент памяти П2 25 для хранения и дальнейшего использования (Р).
Входной параметр уровня сигнала метки 1 А циклически обновляется с интервалом времени dt = t(n) – t(n-1) условно принимаемым за единицу (фиг.4). К началу цикла (n) в параметрическом элементе памяти П1 17 записано значение параметра А, соответствующее предыдущему циклу (n-1) и обозначенное В. Приращение параметра dА = С на единичном интервале времени dt соответствует, в первом приближении, его производной. Если модуль производной |C| больше пороговой константы D, то формируется дискретный сигнал Е=1 означающий перемещение метки 1 между смежными помещениями.
Заявителем в 2022 году был реализован заявленный способ определения позиционирования персонала в зданиях, посредством радиочастотных меток, с использованием селектора уровней сигналов 6 и устройства анализа производной уровней сигнала метки 7 согласно варианту реализации способа. Реализация подтвердила заявленный технический результат, повышение точности определения позиционирования персонала в зданиях составило порядка 30-40% относительно способа прототипа.
Изобретение относится к области позиционирования объектов. Технический результат заключается в повышении точности позиционирования объектов и достигается тем, что при появлении радиочастотной метки в зоне действия считывателя, метка передает сигналы в виде кода идентификатора считывателю, расположенному в помещении здания, через заданные интервалы времени. Селектор уровней сигналов считывателя сравнивает уровень сигнала с первым пороговым значением, средним между минимальным уровнем сигнала от метки на максимальном удалении от считывателя в помещении и максимальным уровнем сигнала от метки в смежном помещении. Устройство анализа производной уровней сигнала считывателя через дискретные промежутки времени формирует значение приращения уровня сигнала, и сравнивает положительное приращение со вторым пороговым уровнем, определенным опытным путем так, что при выходе или входе пользователя с меткой - приращение сигнала больше второго порогового уровня, а при нахождении пользователя внутри помещения – значение уровня сигнала меньше второго порогового уровня. Результаты сравнений передаются через шлюз на сервер и терминальное устройство для визуализации позиционирования. 4 ил.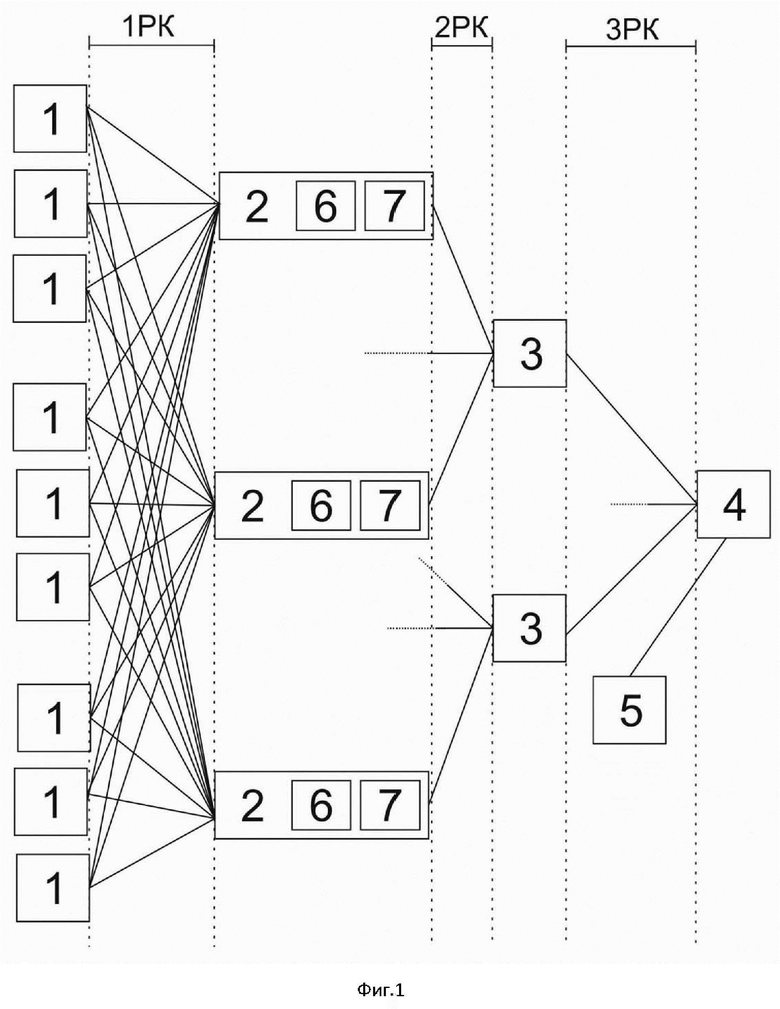
Способ определения позиционирования персонала в зданиях посредством радиочастотных меток, характеризующийся тем, что:
при появлении радиочастотной метки в зоне действия считывателя, осуществляют передачу через заданные интервалы времени, посредством радиоканала, сигналов в виде кода идентификатора радиочастотной метки считывателю, который расположен в помещении здания, и оснащён селектором уровней сигналов меток и устройством анализа производной уровней сигнала метки;
посредством селектора уровней сигналов меток выполняют анализ уровня поступившего сигнала, в ходе которого осуществляют сравнение уровня поступившего сигнала с первым пороговым значением, причем значение первого порогового уровня сигнала задают как среднее значение между минимальным значением уровня сигнала от радиочастотной метки, находящейся в помещении на максимальном удалении от считывателя и максимальным уровнем сигнала от радиочастотной метки, находящейся в смежном помещении;
одновременно с этим, посредством устройства анализа производной уровней сигнала метки, считывают уровни сигналов через дискретные промежутки времени и в каждый дискретный момент времени формируют значение приращения уровня сигнала посредством вычитания текущего значения уровня сигнала от предыдущего, и сравнивают положительное приращение уровня сигнала со вторым пороговым уровнем, значение которого определяется опытным путем, и выбирается исходя из того, что при выходе или входе пользователя с меткой в помещение - приращение сигнала было больше второго порогового уровня, а при нахождении пользователя с меткой внутри помещения – значение уровня сигнала было меньше второго порогового уровня;
результаты сравнения с первым пороговым уровнем и вторым пороговым уровнем передают посредством информационного сигнала по радиоканалу в шлюз, и далее на сервер и терминальное устройство, где визуализируют позиционирование радиочастотной метки с учетом статического и динамического сравнения.
| УСТРОЙСТВО И СИСТЕМА ДЛЯ КОНТРОЛЯ ОБЪЕКТОВ | 2019 |
|
RU2734099C1 |
| EP 3206043 A1, 16.08.2017 | |||
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА СИГНАЛА ПО ВРЕМЕНИ ПРИБЫТИЯ СИГНАЛА | 2012 |
|
RU2499999C2 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| US 9918204 B1, 13.03.2018. | |||

