1. Область техники
Настоящее изобретение в целом относится к воздушным исследованиям, а в частности - к воздушным исследованиям лесов. Еще точнее, настоящее изобретение относится к способу и устройству для выполнения инвентаризации леса посредством воздушного исследования.
2. Уровень техники
Лесопользование является подразделом лесоводства и включает различные аспекты. Эти аспекты могут включать экологический, экономический, административный, правовой и социальный аспекты осуществления лесопользования. Лесопользование может включать различные технологии, такие как лесозаготовка, посадка деревьев, повторная посадка деревьев, прорубка дорог и проходов через леса, предотвращение лесных пожаров, поддержание здоровья леса и другие подходящие мероприятия.
При осуществлении этих и других операций в связи с лесопользованием может потребоваться сбор информации о лесе. Например, сбор информации о лесе обеспечивает возможность анализа состояния леса, а также возможность определения задач, которые могут быть выполнены. Эти задачи могут включать, например, по меньшей один элемент группы, включающей повторную посадку деревьев, заготовку деревьев, прорежение леса для улучшения роста, применение удобрений, выработку оповещений о пожароопасных условиях, запуск мероприятий по уменьшению риска пожаров, удаление мертвых деревьев, уменьшение подлеска на лесной подстилке, осуществление мероприятий по улучшению пиломатериалов и другие подходящие операции.
При получении информации о лесе могут быть выполнены воздушные исследования как часть задачи инвентаризации леса для определения информации о лесе. Задача инвентаризации леса может быть направлена на определение информации о лесе для оценки или анализа. Эта информация может быть использована для определения типов деревьев, высоты деревьев, возраста деревьев, здоровья деревьев, границ леса и другой подходящей информации о деревьях леса. Например, при выполнении задачи инвентаризации леса может быть определено количество деревьев на акр.
Кроме того, задача инвентаризации леса также может быть использована для определения другой информации о растительности, живой природе леса или о том и о другом. Задача инвентаризации леса также может показывать наличие мертвых или гниющих деревьев. В этом случае информация о мертвых или гниющих деревьях может указывать на проблему вредителей. Кроме того, задача инвентаризации леса может быть направлена на определение границ леса.
Воздушные исследования могут быть выполнены с использованием по меньшей мере одного элемента группы, включающей пилотируемые воздушные транспортные средства и беспилотные воздушные транспортные средства. Например, беспилотное воздушное транспортное средство может летать над лесом с выработкой информации о лесе при выполнении задачи инвентаризации леса. Беспилотное воздушное транспортное средство может содержать лидарную систему и съемочную систему. Лидарная система может быть использована для направления к лесу света в виде лазерного луча.
В настоящее время воздушное транспортное средство летает по маршруту, направляемое пилотом, который проводит это воздушное транспортное средство над различными местами в лесу. Эти места выбирают таким образом, что воздушное транспортное средство может вырабатывать информацию обо всем лесе или о его части. Воздушное транспортное средство сканирует место лазерным лучом с использованием лидарной системы, которая измеряет расстояние до точек в лесу путем измерения времени, которое требуется свету для возврата в лидарную систему. На основании этих измерений лидарная система вырабатывает информацию о местах в лесу.
Отклики на лазерный луч, зарегистрированные лидарной системой, используют для выработки облака точек, относящегося к лесу. Это облако точек может быть использовано для выработки такой информации, как высота полога, оценки объема крон, плотность деревьев и другая важная информация.
При, выполнении воздушных исследований этого типа стоимость является одним из факторов, который может влиять на то, когда и как часто выполнять воздушные исследования. Стоимость направления одного воздушного транспортного средства или более для выработки облака точек, относящегося к различным местам в лесу, часто значительна. Чтобы сделать выполнение воздушного исследования более экономичным, каждый раз при выполнении воздушного исследования исследуют большие области. Например, при выполнении воздушного исследования для уменьшения стоимости выполнения воздушного исследования за акр исследуют 50000 акров или более.
Кроме того, воздушные исследования обычно выполняют на одной безопасной высоте над ландшафтом, облетая препятствия и облака, которые могут иметься. При наличии препятствий беспилотному воздушному транспортному средству может потребоваться лететь выше над лесом. При увеличении высоты беспилотного воздушного транспортного средства над исследуемой областью плотность облака точек, вырабатываемого при воздушном исследовании, может быть уменьшена. В результате при выполнении воздушного исследования уровень разрешения облака точек, полученного на основании информации, которая может быть собрана в отношении леса, может быть ниже необходимого.
Кроме того, на этих больших высотах облачный покров может препятствовать прохождению лазерного луча, используемого для выполнения инвентаризации с воздуха. Например, облако может привести к отражению, преломлению лазерного луча или его отклонению другим образом от исследуемого леса. При отражении или преломлении лазерного луча отклики, регистрируемые лидарной системой, могут быть неточными, так как они могут быть получены от облаков, а не от леса. В результате информация облака точек, относящегося к лесу, может иметь пробелы, там, где место покрыто облаками при выполнении воздушных исследований.
Кроме того, из-за стоимости выполнения задачи инвентаризации леса, часто экономичным является только исследование леса через нерегулярные интервалы времени. Таким образом, между исследованиями леса проходят длительные периоды времени. Например, лес могут исследовать только через длительные периоды времени, например через четыре года, в силу ограничений, связанных с персоналом, ограничений, связанных с оборудованием, и стоимости воздушного исследования. Место, опущенное при одном исследовании из-за облачного покрова, может повторно не исследоваться следующие четыре года. В результате может иметься восьмилетний промежуток между сбором информации, относящейся к конкретному месту в лесу.
В настоящее время одним из способов, которым могут быть уменьшены промежутки в получении информации, вырабатываемой при воздушном исследовании, является тщательное планирование воздушного исследования. Например, обычно воздушное исследование выполняют только, когда облачный покров над лесом отсутствует или не превышает конкретный процент. В результате выбор времени, когда облачный покров отсутствует или достаточно мал для получения необходимого количества информации, может уменьшить проблемы пробелов в вырабатываемой информации из-за наличия облачного покрова. Если погодные условия приводят к такому изменению облачного покрова, что облака покрывают большую часть леса, чем необходимо, воздушное исследование может быть перенесено на другое время, когда облака облачного покрова, заслоняющего лес, являются достаточно тонкими для выработки информации с необходимым уровнем качества.
Хотя перенос воздушного исследования на время, когда облачный покров достаточно мал, может обеспечить сбор необходимого количества информации о лесе, этот перенос воздушного исследования может быть более дорогим, чем необходимо. Нередко перенос воздушного исследования может увеличить стоимость его выполнения.
Кроме того, операторы летательных аппаратов, выполняющих исследования с использованием лидарных систем, могут иметь „различный спрос в зависимости от сезона. Например, больший спрос может иметься в летние месяцы, когда облачные покров встречается реже, чем в зимние месяцы. Эти пики и спады спроса на воздушные исследования с использованием летательных аппаратов с лидарными системами могут увеличить средние цены на такие услуги в регионах, где облачный покров встречается чаще.
Кроме того, стоимость выполнения воздушных исследований с использованием летательных аппаратов с лидарными системами может различаться в различных географических регионах. Например, стоимость выполнения воздушного исследования леса в Сиэтле может быть большей, чем стоимость выполнения аналогичного исследования леса в Техасе. Количество облачного покрова в Сиэтле может вести к большим сезонным пикам и спадам спроса на выполнение воздушных исследований с использованием летательных аппаратов с лидарными системами.
Еще одно решение включает использование беспилотных воздушных транспортных средств, летающих под облаками облачного покрова. Полет на этих более низких уровнях может привести к тому, что беспилотное воздушное транспортное средство сталкивается с большим количеством погодных условий, которые могут быть рискованными для него, и к уменьшению поля зрения датчика. Кроме того, беспилотное воздушное транспортное средство при полете на более низких уровнях под облачным покровом может столкнуться с увеличенным количеством препятствий, например с линиями электропередачи, обнаженными горными породами, вышками сотовой связи и препятствиями других типов.
Более того, в населенных областях низко летающие беспилотные воздушные транспортные средства могут поднять вопросы неприкосновенности частной жизни людей, живущих в исследуемой области. Полет беспилотного воздушного транспортного средства на более низких уровнях также может привести к уменьшению площади поверхности сканирования по сравнению с полетом этого беспилотного воздушного транспортного средства на большей высоте. Например, уменьшение высоты на 10 процентов увеличивает на 10 процентов, время, необходимое для проведения воздушного исследования.
Хотя разрешение облака точек может быть увеличено с уменьшением высоты, эффективность с точки зрения времени уменьшается. Иными словами, полет на меньших высотах может привести к увеличению времени, необходимого для выработки облака точек. Это дополнительное время может увеличить стоимость воздушного исследования, причем это увеличение затрат не является оправданным, если это дополнительное разрешение облака точек не требуется.
В некоторых случаях при выполнении воздушных исследований на меньших высотах для выполнения воздушного исследования может быть использовано множество беспилотных воздушных транспортных средств. Дополнительные беспилотные воздушные транспортные средства могут быть использованы для охвата всего леса и чтобы обеспечить выполнение воздушного исследования за ограниченное время. Если оно занимает большее время, это может привести к появлению облачного покрова, который может уменьшить охват при воздушном исследовании.
Кроме того, полет на меньших высотах может привести к увеличению риска обледенения и турбулентности. При этих условиях время, когда могут быть выполнены воздушные исследования, может стать более ограниченным. Например, даже при отсутствии облаков эти условия на меньших высотах также могут препятствовать выполнению воздушного исследования. Таким образом, воздушные исследования, выполняемые на меньших высотах, могут оказаться более дорогими, чем требуется, по сравнению с воздушными исследованиями, выполняемыми на больших высотах над облаками.
Следовательно, необходим способ и устройство, учитывающие по меньшей мере некоторые из упомянутых выше проблем, а также другие возможные проблемы.
Раскрытие изобретения
В одном из иллюстративных вариантов реализации устройство содержит беспилотное воздушное транспортное средство, датчиковую систему, содержащую датчик электромагнитной энергии, и управляющее устройство для управления исследованием. Датчиковая система, содержащая датчик электромагнитной энергии, связана с беспилотным - воздушным транспортным средством и выполнена с возможностью выработки информации о лесе. Управляющее устройство для управления исследованием выполнено с возможностью определения некоторого количества мест над лесом, в которых уменьшено влияние облачного покрова на уровень (238) информации, относящийся к информации о лесе, вырабатываемой датчиковой системой, содержащей датчик электромагнитной энергии.
Еще в одном иллюстративном варианте реализации система для выполнения воздушного исследования содержит флот беспилотных воздушных транспортных средств и управляющее устройство для управления исследованием, выполненное с возможностью управления выработкой информации о некотором количестве мест в области земли на основании облачного покрова над некоторым количеством мест.
Еще в одном иллюстративном варианте реализации предложен способ выработки информации о лесе. В соответствии с указанным способом, определяют некоторое количество мест в лесу, над которыми датчиковая система, содержащая датчик электромагнитной энергии, беспилотного воздушного транспортного средства вырабатывает информацию о лесе путем выработки облака точек с разрешением, удовлетворяющим пороговому разрешению облака точек. Далее, вырабатывают маршрут беспилотного воздушного транспортного средства для его движения к указанному некоторому количеству мест и заработки информации о лесе в указанном некотором количестве мест.
Указанные признаки и функции могут быть реализованы независимо в различных вариантах реализации настоящего изобретения или могут быть объединены в других вариантах реализации, которые подробно описаны в нижеследующем описании с учетом чертежей.
Краткое описание чертежей
Новые признаки, которые рассматриваются как отличительные признаки иллюстративных вариантов реализации, представлены в приложенной формуле. Однако иллюстративные варианты реализации, а также предпочтительные способы использования, другие задачи и признаки, направленные на их решение, будут ясны из нижеследующего подробного описания иллюстративного варианта реализации настоящего изобретения, рассматриваемого совместно с сопроводительными чертежами, из которых:
фиг.1 иллюстрирует среду для выполнения воздушного исследования в соответствии с одним из иллюстративных вариантов реализации;
фиг.2 иллюстрирует функциональную схему среды для выполнения воздушного исследования в соответствии с одним из иллюстративных вариантов реализации;
фиг.3 иллюстрирует функциональную схему беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации;
фиг.4 иллюстрирует систему для выполнения воздушного исследования в соответствии с одним из иллюстративных вариантов реализации;
фиг.5 иллюстрирует маршрут для выполнения воздушного исследования в соответствии с одним из иллюстративных вариантов реализации;
фиг.6 иллюстрирует маршрут беспилотного воздушного транспортного средства через лес в соответствии с одним из иллюстративных вариантов реализации;
фиг.7 иллюстрирует маршрут беспилотного воздушного транспортного средства через лес при наличии облаков в соответствии с одним из иллюстративных вариантов реализации;
фиг.8 иллюстрирует еще один маршрут беспилотного воздушного транспортного средства через лес при наличии облаков в соответствии с одним из иллюстративных вариантов реализации;
фиг.9 иллюстрирует блок-схему сообщений системы для выполнения воздушного исследования, выполняющей исследование над областью земли в соответствии с одним из иллюстративных вариантов реализации;
фиг.10 иллюстрирует блок-схему процесса выработки информации о лесе в соответствии с одним из иллюстративных вариантов реализации;
фиг.11 иллюстрирует блок-схему процесса выработки маршрута беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации; и
фиг.12 иллюстрирует функциональную схему обрабатывающей системы для обработки данных в соответствии с одним из иллюстративных вариантов реализации.
Подробное описание изобретения
Иллюстративные варианты реализации учитывают по меньшей мере одно обстоятельство. Например, иллюстративные варианты реализации учитывают, что для получения необходимого уровня качества информации при выполнении воздушного исследования с использованием лидарной системы необходимо избегать облачного покрова. Кроме того, иллюстративные варианты реализации учитывают, что в случае используемых в настоящее время способов выполнения воздушных исследований облачный покров может привести к пробелам в информации о лесе в силу длительных периодов времени между исследованиями. Более того, полет под облачным покровом является неэффективным использованием датчика, требующим значительно большего полетного времени и увеличивающим стоимость выполнения воздушного исследования.
Иллюстративные варианты реализации также учитывают, что, хотя облачный покров может иметься над лесом в конкретный момент времени, он может не покрывать в это время весь лес. В результате может иметься одно место или более, в котором облака над лесом отсутствуют. Иными словами, просветы в облаках над этими местами могут обеспечивать необходимый сбор информации о лесе с использованием лидарной системы беспилотного воздушного транспортного средства. Иллюстративные варианты реализации учитывают, что воздушное исследование может быть выполнено над местами, в которых облака облачного покрова отсутствуют.
Далее, иллюстративные варианты реализации учитывают, что места, в которых облачный покров отсутствует, часто смещаются при движении облаков. Иллюстративные варианты реализации также учитывают, что воздушное исследование может быть выполнено способом, учитывающим смещение мест, в которых облачный покров отсутствует или является достаточно тонким для обеспечения необходимого количества информации.
Таким образом, иллюстративные варианты реализации предлагают способ и устройство для выполнения воздушного исследования леса. В одном из иллюстративных вариантов реализации устройство включает беспилотное воздушное транспортное средство, датчиковую систему, содержащую датчик электромагнитной энергии и связанную с беспилотным воздушным транспортным средством, и управляющее устройство для управления исследованием.
Датчиковая система, содержащая датчик электромагнитной энергии, выполнена с возможностью выработки информации о лесе. Управляющее устройство для управления исследованием выполнено с возможностью определения некоторого количества мест над лесом, в которых имеются условия, необходимые для выработки датчиковой системой, содержащей датчик электромагнитной энергии, информации о лесе с требуемым уровнем качества. Используемый здесь термин «некоторое количество» применительно к объектам означает один объект или более. Например, некоторое количество мест означает одно место или более.
На фиг.1 проиллюстрирована среда для выполнения воздушного исследования в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере среда 100 для выполнения воздушного исследования включает беспилотные воздушные транспортные средства 102, летающие над лесом 104. Как показано, беспилотные воздушные транспортные средства 102 включают беспилотное воздушное транспортное средство 106 и беспилотное воздушное транспортное средство 108.
В этом конкретном примере беспилотные воздушные транспортные средства 102 выполнены с возможностью выполнения воздушного исследования леса 104. Беспилотное воздушное транспортное средство 106 содержит лидарную систему 110, а беспилотное воздушное транспортное средство 108 содержит лидарную систему 112.
Как показано, лидарная система 110 выполнена с возможностью сканирования леса 104 лазерным лучом 114. Лидарная система 110 регистрирует отклики на сканирование лазерным лучом 114. Это сканирование может быть осуществлено путем качания или движения - лазерного луча 114 по лесу 104. Это сканирование может иметь схему, аналогичную схеме растрового сканирования, выполняемого при выработке изображений на дисплейном устройстве в некоторых иллюстративных примерах. Разумеется, это сканирование может быть осуществлено при качании лазерного луча по любой схеме, приспособленной для выработки информации о лесе 104 при регистрации откликов на лазерный луч 114.
Эти отклики могут быть использованы для формирования облака точек, относящегося к частям леса 104, просканированных лазерным лучом 114. Облако точек предоставляет относящиеся к лесу 104 вершины или точки, связанные с данными. Эти вершины могут быть использованы для определения объектов в лесу 104, например деревьев, листьев, ветвей и других подходящих объектов.
Аналогично лидарная система 112 беспилотного воздушного транспортного средства 108 также выполнена с возможностью выработки информации о лесе 104 с использованием лазерного луча 116, который также можно качать по лесу 104 при полете над ним беспилотного воздушного транспортного средства 108. Отклики на лазерный луч 116 также могут быть зарегистрированы и использованы для выработки облака точек. Облака точек, относящиеся к различным частям леса 104, просканированным лазерным лучом 114 и лазерным лучом 116, могут быть объединены с получением облака точек, относящегося к лесу 104.
В этом иллюстративном примере над лесом 104 имеются облака 118. Как показано, беспилотные воздушные транспортные средства 102 летят над облаками 118. В результате облака 118 образуют облачный покров, который может препятствовать выработке беспилотными воздушными транспортными средствами 102 информации обо всем лесе 104.
Могут быть определены места 120, в которых облака 118 отсутствуют. В некоторых иллюстративных примерах места 120 могут быть местами, в которых облака 118 могут иметься, но быть достаточно тонкими или иметь такой состав, чтобы тем не менее была обеспечена возможность выработки беспилотными воздушными транспортными средствами 102 необходимого количества информации.
В этом иллюстративном примере места 120 включают место 122 и место 124. С определением мест 120 беспилотными воздушными транспортными средствами 102 можно управлять с обеспечением их полета над местами 120 для выработки информации о лесе 104. Например, беспилотным воздушным транспортным средством 106 можно управлять с обеспечением его полета над местом 122, а беспилотным воздушным транспортным средством 108 управляют с обеспечением его полета над местом 124 при выполнении воздушного исследования леса 104.
Далее, при смещении мест 120 при движении облаков 118, маршруты беспилотных воздушных транспортных средств 102 также могут быть изменены с их перенаправлением к новым местам, в которых облака 118 обеспечивают необходимый уровень качества вырабатываемой информации о лесе 104.
В результате беспилотные воздушные транспортные средства 102 могут следовать по маршруту динамически при выполнении воздушного исследования леса 104. В этих иллюстративных примерах маршруты беспилотных воздушных транспортных средств 102 могут быть изменены, когда места 120, в которых облака 118 отсутствуют, обеспечивают выработку информации о лесе 104 необходимого качества.
В частности, изменение маршрутов беспилотных воздушных транспортных средств 102 может быть осуществлено таким образом, что просканирован весь лес 104 с выработкой информации, относящейся к облаку точек, относящегося к лесу 104. В другом случае, если весь лес 104 не может быть просканирован из-за облаков 118, иллюстративный вариант реализации обеспечивает увеличение части леса 104, которая может быть просканирована, по сравнению с используемыми в настоящее время способами. Иными словами, при использовании иллюстративного варианта реализации с использованием динамического задания маршрута беспилотных воздушных транспортных средств 102 может быть просканирована большая часть леса, чем позволяют используемые в настоящее время системы для выполнения воздушного исследования при данных условиях облачности.
В этих иллюстративных примерах информация об облаках 118 может быть выработана на основании некоторого количества различных источников. Например, информация об облаках 118 может представлять собой изображения, вырабатываемыми такими источниками, как спутник 126, наземный формирователь 128 изображения кругового обзора, летательный аппарат 130, беспилотное воздушное транспортное средство 106, беспилотное воздушное транспортное средство 108 и другие подходящие источники.
Спутник 126 может вырабатывать изображения облаков 118 над лесом 104. Наземный формирователь 128 изображения кругового обзора может вырабатывать изображение облаков 118 с земли 134. Аналогично летательный аппарат 130 может лететь над облаками 118 и вырабатывать изображения облаков 118 над лесом 104. Эта информация, вырабатываемая по меньшей мере одним элементом группы, включающей спутник 126, наземный формирователь 128 изображения кругового обзора и летательный аппарат 130, может быть направлена по меньшей мере на один элемент группы, включающей беспилотные воздушные транспортные средства 102 и управляющее устройство для управления исследованием 131 управляющей станции 132.
В этих иллюстративных примерах беспилотные воздушные транспортные средства 102, управляющее устройство для управления исследованием 131 или и те, и другое могут использовать информацию, вырабатываемую по меньшей мере одним элементом группы, включающей спутник 126, наземный формирователь 128 изображения кругового обзора и летательный аппарат 130, для определения того, где расположены облака 118. Таким образом могут быть определены места 120, в которых облака 118 отсутствуют. В этих иллюстративных примерах могут быть выработаны маршруты полета беспилотных воздушных транспортных средств 102 над местами 120. В этих иллюстративных примерах это задание маршрута может быть выполнено по меньшей мере одним элементом группы, включающей беспилотные воздушные транспортные средства 102 и управляющее устройство для управления исследованием 131.
В этих примерах определение мест 120, задание маршрута беспилотных воздушных транспортных средств 102 или и то, и другое могут быть выполнены в месте, отличном от того, где расположены беспилотные воздушные транспортные средства 102. Например, эти операции - могут быть выполнены управляющим устройством для управления исследованием 131 управляющей станции 131, которое затем может направлять информацию о маршруте на беспилотные воздушные транспортные средства 102.
Это задание маршрута беспилотных воздушных транспортных средств 102 над лесом 104 может быть выполнено таким образом, что обеспечена выработка большего количества информации о лесе 104 по сравнению с выполнением воздушного исследования на постоянном маршруте при наличии облаков 118.
На фиг.2 проиллюстрирована функциональная схема среды для выполнения воздушного исследования в соответствии с одним из иллюстративных вариантов реализации. Среда 100 для выполнения воздушного исследования, представленная на фиг.1, является одним из примеров реализации среды 200 для выполнения воздушного исследования, представленной на фиг.2.
В этом иллюстративном примере среда 200 является примером среды, в которой может быть выработана информация 202, относящаяся к лесу 204. В частности, воздушное исследование 206 может быть выполнено в отношении области 246 леса 204. Область 246 может быть частью леса 204 или всем лесом 204 в зависимости от конкретной реализации.
В этих иллюстративных примерах информация 202 может включать облако 234 точек, содержащее вершины в трехмерной системе координат. Эти вершины обычно описывают с использованием координат х, y и z. Эти вершины предназначены для представления внешней поверхности объекта, например дерева. Эти вершины также могут называться точками.
Как показано, информация 202 может быть выработана путем воздушного исследования 206, выполняемого с использованием системы 208 для выполнения воздушного исследования. В этом примере система 208 включает флот 210 беспилотных воздушных транспортных средств и управляющее устройство 212 для управления исследованием.
В этих иллюстративных примерах управляющее устройство 212 для управления исследованием может быть реализовано с использованием аппаратных средств, программных средств или их комбинации. В этих иллюстративных примерах аппаратные средства могут быть системой, содержащей электронную схему, интегральной схемой, специализированной интегральной схемой (ASIC), программируемым логическим устройством или аппаратными средствами другого подходящего типа, выполненными с возможностью выполнения некоторого количества операций. В случае программируемого. логического устройства оно выполнено с возможностью выполнения указанного некоторого количества операций. Это устройство может быть переналажено позднее или может быть выполнено с постоянной возможностью выполнения указанного некоторого количества операций.
Примеры программируемых логических устройств включают, например, программируемую логическую матрицу, программируемую матричную логическую схему, программируемую пользователем логическую матрицу, программируемую пользователем вентильную матрицу и другие подходящие аппаратные средства. Кроме того, процессы могут быть реализованы на органических компонентах, интегрированных с неорганическими компонентами, и/или быть осуществлены полностью на органических компонентах, исключая человека. Например, процессы могут быть реализованы в виде электронных схем на органических полупроводниках.
Как показано, управляющее устройство 212 для управления исследованием может быть реализовано в компьютерной системе 222, которая содержит один компьютер или более. При наличии в ней более одного компьютера эти компьютеры могут быть связаны друг с другом посредством среды для обеспечения связи, например сети.
В этих иллюстративных примерах управляющее устройство для управления исследованием в компьютерной системе 222 может быть расположено в одном месте, например в управляющей станции 224. Управляющая станция 224 может быть расположена в здании на земле, на летательном аппарате, корабле, космической станции, спутнике, наземном транспортном средстве или в другом подходящем месте.
В других иллюстративных примерах управляющее устройство 212 для управления исследованием может быть распределено в различных местах. Например, оно может быть распределено в одном или более из некоторого количества беспилотных воздушных транспортных средств 214 флота 210 беспилотных воздушных транспортных средств. В других иллюстративных примерах управляющее устройство 212 для управления исследованием может быть расположено в некотором количестве беспилотных воздушных транспортных средств 214 и управляющей станции 224 в зависимости от конкретной реализации. Кроме того, в других иллюстративных примерах управляющее устройство 212 для управления исследованием может быть расположено в удаленном месте.
В этих иллюстративных примерах управляющее устройство 212 для управления исследованием может обладать уровнем интеллекта 211. Уровень интеллекта 211 может варьироваться в зависимости от реализации управляющего устройства 212 для управления исследованием. В некоторых случаях управляющее устройство 212 для управления исследованием может быть компьютерной программой, принимающей входную информацию от оператора и выдающее выходную информацию оператору.
В других иллюстративных примерах уровень интеллекта 211 может быть выше, так что входная информация от оператора может быть не нужна. Например, требуемый уровень интеллекта 211 управляющего устройства 212 для управления исследованием может обеспечивать система искусственного интеллекта и процессоры других подходящих типов. В частности, система искусственного интеллекта может включать экспертную систему, нейронную сеть, простую эвристику, линейную, нелинейную программу или программу целочисленных вычислений, нечеткую логику, байесовские сети или системы других подходящих типов, обеспечивающих требуемый уровень интеллекта 211 управляющего устройства 212 для управления исследованием.
В этом иллюстративном примере флот 210 беспилотных воздушных транспортных средств включает некоторое количество беспилотных воздушных транспортных средств 214. Как показано, некоторое количество беспилотных воздушных транспортных средств 214 может быть группой автономных беспилотных воздушных транспортных средств 216 или может включать эту группу. Группа автономных беспилотных воздушных транспортных средств 216 может быть выполнена с возможностью работы в качестве роя 218 или группы роев 220 в этих иллюстративных примерах.
Одно или более из некоторого количества беспилотных воздушных транспортных средств 214 выполнено с возможностью выполнения воздушного исследования 206 с выработкой информации 202 о лесе 204. В этих иллюстративных примерах некоторое количество беспилотных воздушных транспортных средств 214 может лететь маршрутами 250 над лесом 204 для выработки информации 202. Маршруты 250 могут быть выработаны управляющим устройством 212 для выполнения исследования в этих иллюстративных примерах.
Как показано, маршруты 250 вырабатывают и направляют на некоторое количество беспилотных воздушных транспортных средств 214 с управляющего устройства 212 для управления исследованием. В этом случае система 208 выполнена с использованием методов централизованного управления. В других вариантах реализации управляющее устройство 212 для управления исследованием может быть реализовано на программных и аппаратных средствах, распределенных между одним или более из некоторого количества беспилотных воздушных транспортных средств 214 или между другими платформами и координироваться путем связи между беспилотными воздушными транспортными средствами из некоторого количества беспилотных воздушных транспортных средств 214. В этой реализации система 208 может вырабатывать маршруты 250 с использованием методов децентрализованного управления.
Например, беспилотное воздушное транспортное средство 230 может лететь по маршруту 232 из числа маршрутов 250 над лесом 204 для выработки информации 202. При выполнении воздушного исследования в отношении леса 204 над лесом 204 может иметься облачный покров 226 из некоторого количества облаков 228.
Некоторое количество облаков 228 облачного покрова 226 может уменьшать уровень 238 информации некоторых частей информации 202, там где имеется некоторое количество облаков 228. В частности, над некоторым количеством мест 236 в лесу 204 могут иметься просветы 248 в некотором количестве облаков 228.
Например, если в некотором количестве беспилотных воздушных транспортных средств 214 использованы лидарные системы, информация 202, извлекаемая из откликов на лазерные лучи, направляемые к области 246 леса 204, может включать информацию о некотором количестве облаков 228, а не о лесе 204. Если качество информации 202 о лесе 204 достаточно низкое, информация 202 может не иметь необходимого уровня 238 информации. Эта информация может представлять собой информацию 202 необходимого уровня качества. Уровень 238 информации, относящийся к качеству информации 202, может быть измерен различными способами. Например, информация 202 может иметь уровень 238 информации, если в облаке 234 точек имеется необходимое количество точек на единицу площади земли.
В других иллюстративным примерах уровень 238 информации может быть измерен через интенсивность откликов, регистрируемых датчиковой системой 242. Кроме того, уровень 238 информации может быть определен через отношение сигнал/шум, контрастность и другие подходящие параметры.
В других иллюстративных примерах уровень 238 информации может быть измерен через необходимый промежуток между точками облака 234 точек. В этом случае могут потребоваться более точные данные, и, таким образом, может быть необходимо меньшее расстояние между точками облака 234 точек. Для достижения меньшего расстояния между точками облака 234 точек уровень 238 информации может быть необходимым при сканировании датчиковой системой 242 меньшей области во время выполнения беспилотным воздушным транспортным средством 230 воздушного исследования 206 над лесом 204. Иными словами, датчиковая система 242 может сканировать лес 204 с меньшим полем зрения для обеспечения необходимого уровня 238 информации.
В частности, это уменьшение уровня 238 информации может привести к тому, что разрешение 239 облака 234 точек будет меньше, чем пороговое разрешение облака точек 234. В этих иллюстративных примерах разрешение 239 облака 234 точек меньше порогового разрешения облака точек, когда на основании облака 234 точек различные параметры не могут быть определены с необходимой точностью. Примером этого является ситуация, когда по меньшей мере один элемент группы, включающей высоту полога, плотность леса или другую информацию о лесе, не может быть определен из-за того, что разрешение 239 облака 234 точек меньше порогового разрешения облака точек.
В этих иллюстративных примерах при выработке маршрута 232 управляющее устройство 212 для управления исследованием выполнено с возможностью определения некоторого количества мест 236 над лесом 204, в которых уменьшено влияние облачного покрова 226 на уровень 258 информации о лесе 204, вырабатываемой беспилотным воздушным транспортным средством 230. Это определение некоторого количества мест 236 может происходить динамически.
Таким образом, маршрут 232 может не быть постоянным и может быть динамическим в зависимости от некоторого количества мест 236, в которых облачный покров 226 обеспечивает большее разрешение 239 облака 234 точек, вырабатываемого на основании информации 202 беспилотным воздушным транспортным средством 230, чем пороговое разрешение облака точек. Иными словами, маршрут 232 из числа маршрутов 250 является динамическим маршрутом 244 в этих иллюстративных примерах.
В этих примерах некоторое количество мест 236 может быть местами, в которых некоторое количество облаков 228 отсутствует. В других иллюстративных примерах некоторое количество мест 236 может быть местами, в которых имеется одно или более облако из некоторого количества облаков 228, но эти облака из некоторого количества облаков 228 имеют характеристики, обеспечивающее разрешение 239 облака 234 точек, которое удовлетворяет пороговому разрешению облака точек или превышает его. Разрешение 239 может удовлетворять пороговому разрешению облака точек или превышать его, даже если в некотором количестве мест 236 имеется некоторое количество облаков 228.
Как показано, управляющее устройство 212 для управления исследованием выполнено с возможностью определения движения или других изменений некоторого количества облаков 228 облачного покрова 226, которые вызывают изменения в некотором количестве мест 236. Управляющее устройство 212 для управления исследованием выполнено с возможностью выработки маршрута 232 беспилотного воздушного транспортного средства 230. Выработка маршрута 232 может быть выполнена динамически. Иными словами, когда управляющее устройство 212 для управления исследованием вырабатывает маршрут 232, выработка маршрута 232 может включать первоначальный выбор маршрута 232, модификацию маршрута 232 или другие его изменения.
Таким образом, маршрут 232 может быть изменен во время выполнения беспилотным воздушным транспортным средством 230 воздушного исследования 206. Точнее, выработка маршрута 232 беспилотного воздушного транспортного средства 230 управляющим устройством 212 для управления исследованием может проходить при наступлении события, например определения некоторого количества мест 236. Выработка маршрута 232 беспилотного воздушного транспортного средства 230 управляющим устройством 212 для управления исследованием может также проходить при наступлении события, когда некоторое количество мест 236 изменяется периодически, непрерывно или другим подходящим способом.
Как показано, управляющее устройство 212 для управления исследованием может динамически вырабатывать маршрут 232 в трехмерной системе координат. В этих иллюстративных примерах маршрут 232 может быть трехмерным. В одном из иллюстративных примеров управляющее устройство 212 для управления исследованием может изменять маршрут 232 в трехмерной системе координат для уменьшения влияния облачного покрова 226 на уровень 238 информации, относящийся к информации 202, вырабатываемой беспилотным воздушным транспортным средством 230.
Например, при выработке динамического маршрута 244 управляющее устройство 212 для управления исследованием может регулировать высоту беспилотного воздушного транспортного средства 230 помимо его направления в некоторое количество мест 236, в которых облака могут отсутствовать. В этом случае высота беспилотного воздушного транспортного средства 230 может быть уменьшена для обеспечения необходимого уровня 238 информации, относящегося к облаку 234 точек, путем ограничения поля зрения датчиковой системы 242. В других иллюстративных примерах клочки облачного покрытия могут указывать на то, что беспилотному воздушному транспортному средству 230 следует лететь под некоторым количеством облаков 228 в течение короткого периода времени, а затем изменить высоту. Иными словами, маршрут 232 можно регулировать таким образом, что беспилотное воздушное транспортное средство 230 может лететь под некоторым количеством облаков 228 и вернуться к положению над ними после их передвижения. Эта стратегия применима, когда клочки из некоторого количества облаков 228 не двигаются ввиду отсутствия ветра.
В некоторых случаях может быть принята информация 240 об облаках, остающаяся точной для выполнения воздушного исследования 206. В некоторых иллюстративных примерах информация 240 об облаках может быть принята только один раз или может приниматься прерывисто. В этом случае управляющее устройство 212 для управления исследованием может прогнозировать состояние некоторого количества мест 236 над лесом 204 во времени на основании принятой информации 240 об облаках.
В этих иллюстративных примерах, если для выполнения воздушного исследования 206 области 246 леса 204 использовано одно или более дополнительное беспилотное воздушное транспортное средство - из некоторого количества беспилотных воздушных транспортных средств 214, управляющее устройство 212 для управления исследованием может управлять им для охвата всей области 246. Это управление может быть выполнено для уменьшения или исключения перекрытия при выработке информации 202 в области 246 леса 204. В этом конкретном примере управляющее устройство 212 для управления исследованием вырабатывает маршруты 250 в виде динамических маршрутов 254 беспилотных воздушных транспортных средств из некоторого количества беспилотных воздушных транспортных средств 214.
В других иллюстративных примерах некоторое количество беспилотных воздушных транспортных средств 214, используемых для выполнения воздушного исследования 206, могут быть группой автономных беспилотных воздушных транспортных средств 216, работающих в качестве роя 218 или группы роев 220 для выработки информации 202, относящейся к области 246 леса 204. Таким образом беспилотные воздушные транспортные средства из группы беспилотных воздушных транспортных средств 216 могут действовать совместно для выработки и динамической модификации маршрутов 250 с обеспечением максимально эффективной выработки информации 202 в области 246.
В этом конкретном примере группа автономных беспилотных воздушных транспортных средств 216 выполнена с возможностью выработки маршрутов 250 в виде динамических маршрутов 254. В этом конкретном примере управляющее устройство 212 для управления исследованием может быть расположено на одном или более из группы автономных беспилотных воздушных транспортных средств 216. В результате перекрытие при выработке информации 202, относящейся к конкретной части области 246, может быть уменьшено или исключено. Кроме того, маршруты 250 могут быть выработаны и модифицированы с уменьшением времени, необходимого для выполнения воздушного исследования 206.
В этих иллюстративных примерах управляющее устройство 212 для управления исследованием выполнено с возможностью непрерывной выработки динамических маршрутов 254. Например, динамические маршруты 254 могут быть выработаны во время полета некоторого количества беспилотных воздушных транспортных средств 214. В некоторых случаях на основании текущего состояния облачного покрова 226 и, в частности, на основании просветов 248 в некотором количестве облаков 228 могут быть выработаны плановые маршруты.
По мере движения некоторого количества облаков 228 маршруты 250 могут быть динамически изменены как часть выработки маршрутов 250 с получением динамических маршрутов 254. Таким образом, динамические маршруты 254 могут быть выработаны динамическими различными способами. В некоторых случаях динамические маршруты 254 могут быть выработаны при полете некоторого количества беспилотных воздушных транспортных средств 214 для выполнения воздушного исследования 206. Иными словами, маршруты 250 могут не быть составлены для всего воздушного исследования 206, до тех пор, пока беспилотные воздушные транспортные средства 214 начали полет над лесом 204. Вместо этого, маршруты 250 вырабатывают во время полета некоторого количества беспилотных воздушных транспортных средств 214. Маршруты 250 вырабатывают во время полета на основании информации 202, вырабатываемой некоторым количеством беспилотных воздушных транспортных средств 214, и на основании движения некоторого количества облаков 228, в которых имеются просветы 248, над некоторым количеством мест 236.
В других иллюстративных примерах маршруты 250 могут быть запланированы на основании текущего места некоторого количества облаков 228 и прогноза их движения. Затем маршруты 250 могут быть модифицированы как часть выработки маршрутов 250 на основании действительного движения некоторого количества облаков 228 или изменений прогноза их движения над лесом 204.
Управляющее устройство 212 для управления исследованием может использовать вероятностную модель для прогноза движения некоторого количества облаков 228 в этих иллюстративных примерах. Например, оно может использовать дискретную модель Маркова или модели других подходящих типов. В результате управляющее устройство 212 для управления исследованием может прогнозировать движение некоторого количества облаков 228, так что маршруты 250 могут быть выработаны там, где некоторое количество облаков 228 отсутствует.
В этих иллюстративных примерах определение некоторого количества мест 236 может быть выполнено с использованием информации 240 об облаках, которая может быть выработана с использованием датчиковой системы 242. Информация 240 об облаках может быть различных видов, например изображениями, картами и информацией других подходящих типов. Датчиковая система 242 может включать по меньшей мере один элемент группы, включающей спутник, наземный формирователь изображения кругового обзора, съемочную систему на летательном аппарате, съемочную систему на беспилотном воздушном транспортном средстве, радарную систему и датчики других подходящих типов, выполненные с возможностью выработки информации 240 об облаках.
Среду 200, проиллюстрированную на фиг.2, не следует рассматривать как накладывающую физические или архитектурные ограничения на способ, которым может быть реализован иллюстративный вариант реализации. В дополнение к проиллюстрированным компонентам или вместо них могут быть использованы другие компоненты. Некоторые компоненты могут не требоваться. Кроме того, представленные схемные блоки иллюстрируют некоторые функциональные компоненты. Один из этих схемных блоков или более может быть объединен, разделен или объединен и разделен на различные схемные блоки при его реализации в одном из иллюстративных вариантов реализации.
Например, в других иллюстративных примерах система 208 может включать транспортные средства других типов, отличные от транспортных средств флота 210. Например, при проведении воздушного исследования 206 также могут быть использованы пилотируемые воздушные транспортные средства. В других иллюстративных примерах датчиковая система 242 также может рассматриваться как часть системы 208.
Еще в одном иллюстративном примере воздушное исследование 206, выполняемое с использованием системы 208, может быть выполнено над землями других типов в дополнение к лесу 204 или вместо него. Например, область 246 может включать земли других типов. Земли различных типов, которые могут быть исследованы, могут включать, например, помимо прочего город, ферму, пустыню, гору, прерию или земли других подходящих типов. Кроме того, воздушное исследование может быть выполнено в отношении водоемов, например реки, пруда, озера, моря, океана или водоемов других подходящих типов.
Более того, воздушное исследование 206 может быть использовано для выполнения операций других типов, отличных от исследования для инвентаризации леса. Например, воздушное исследование 206 может быть использовано для картирования пойм, мелкомасштабного высокоплотного моделирования ландшафта, исследований на уровне государства, оценок биомассы, моделирования земной поверхности, дорожного картирования, картирования линий электропередачи и газопроводов, выработки моделей цепных линий, анализа критического расстояния до растений, планирования инфраструктуры для обеспечения связи, планирования запасных маршрутов, управления имуществом, трехмерного картирования городов, картирования мелководья или других подходящих операций с использованием датчиковой системы, например датчиковой системы 242.
Таким образом, эти иллюстративные варианты реализации могут выполнять воздушные исследования 206 для выработки облака 234 точек с разрешение 239, удовлетворяющим пороговому разрешению 243 облака точек, более эффективно, чем посредством используемых в настоящее время способов. Когда разрешение 239 равно пороговому разрешению 243 облака точек или больше него, облако 234 точек может иметь необходимый уровень качества или разрешения. В этих иллюстративных примерах пороговое разрешение 243 облака точек может разниться в зависимости от конкретного использования. Например, при видах использования, отличных от описанных выше, пороговое разрешение 243 облака точек может отличаться от порогового разрешения в случае леса 204.
Управляющее устройство 212 для управления исследованием может вырабатывать маршрут 232 беспилотного воздушного транспортного средства 230, так что динамический маршрут 244 учитывает изменения окружающей среды вокруг этого беспилотного воздушного транспортного средства 230. Таким образом, управляющее устройство 212 для управления исследованием может регулировать маршрут 232 в трехмерной системе координат. При использовании управляющего устройства 212 для управления исследованием и беспилотного воздушного транспортного средства 230 может быть выработано более полное облако точек, относящееся к лесу 204, за меньшую стоимость, чем посредством используемых в настоящее время способов.
В других иллюстративных примерах уменьшение стоимости может обеспечить использование для выполнения воздушного исследования 206 роя 218. Например, в датчиковой системе 242 роя 218 может быть использован менее дорогой, меньший и более легкий датчик. При использовании меньшего датчика беспилотному воздушному транспортному средству для достижения уровня 238 информации, необходимого для облака 234 точек, может потребоваться лететь на меньшей высоте.
При использовании роя 218 каждое беспилотное воздушное транспортное средство может лететь на меньшей высоте и достигать уровня 238 информации, необходимого для облака 234 точек, с уменьшением времени, необходимого для выработки облака 234 точек., Использование роя 218 также может обеспечить использование меньших беспилотных воздушных транспортных средств, которые могут использовать меньше топлива и выполнять более эффективные полетные операции, чем большие беспилотные воздушные транспортные средства. Таким образом, воздушное исследование 206, выполняемое роем 218, может обеспечить уменьшение стоимости за счет топлива, датчикового оборудования, содержащего лидарную систему, оборудования воздушной платформы, транспортировки оборудования, продолжительности исследования или за счет других источников. В этом примере управляющее устройство 212 для управления исследованием может быть оборудовано компонентами для интегрирования потоков данных от каждой датчиковой системы каждого беспилотного воздушного транспортного средства роя 218.
На фиг.3 проиллюстрирована функциональная схема беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере беспилотное воздушное транспортное средство 300 является одним из примеров реализации беспилотного воздушного транспортного средства из некоторого количества беспилотных воздушных транспортных средств 214 флота 210, представленного на фиг.2. Беспилотное воздушное транспортное средство 300 может быть использовано для реализации беспилотного воздушного транспортного средства 106 и беспилотного воздушного транспортного средства 108, представленных на фиг.1.
В этом иллюстративном примере беспилотное воздушное транспортное средство 300 включает некоторое количество различных компонентов. Например, оно включает планер 302, двигательную систему 304, датчиковую систему 306, систему 308 для обеспечения связи, управляющее устройство 310 и источник 312 энергии.
Планер 302 является конструкцией для физической поддержки других компонентов беспилотного воздушного транспортного средства 300. Планер 302 может быть фюзеляжем, крыльями, стабилизаторами, элеронами, рулями направления или конструкциями других подходящих типов.
Двигательная система 304 связана с планером 302 и выполнена с возможностью обеспечения движения беспилотного воздушного транспортного средства 300. Если один компонент «связан» с другим компонентом, в этих описанных примерах такая связь означает,,>-. физическую связь.
Например, первый компонент, двигательную систему 304, можно считать связанным со вторым компонентом, планером 302, путем фиксации со вторым компонентом, сцепления со вторым компонентом, монтирования со вторым компонентом, сварки со вторым компонентом, прикрепления ко второму компоненту и/или соединения со вторым компонентом другим подходящим способом. Первый компонент также может быть соединен со вторым компонентом с использованием третьего компонента. Первый компонент также можно считать связанным со вторым компонентом путем его выполнения в качестве части или продолжения второго компонента.
Двигательная система 304 может быть различных видов. Например, она может включать по меньшей мере один элемент группы, включающей некоторое количество двигателей и некоторое количество винтов. В других примерах двигательная система 304 может быть реактивным двигателем, турбореактивным двигателем или двигательной системой другого типа для обеспечения движения беспилотного воздушного транспортного средства 300.
Датчиковая система 306 связана с планером 302 и выполнена с возможностью выработки информации об окружающей среде вокруг беспилотного воздушного транспортного средства 300. Датчиковая система 306 может включать датчики многих различных типов.
В этом конкретном примере датчиковая система 306 включает датчиковую систему 311, содержащую датчик электромагнитной энергии. Датчиковая система 311 может быть любой датчиковой системой, выполненной с возможностью регистрации электромагнитной энергии. В этом иллюстративном примере датчиковая система 311 может быть лидарной системой 313.
Лидарная система 313 может сканировать область 246 лазерным лучом. Она может регистрировать электромагнитную энергию от объектов в лесу 204, представленном на фиг.2. В этих иллюстративных примерах эта электромагнитная энергия может быть откликом на импульс лазерного луча. В частности, этот отклик может быть одним возвратом или более.
Лидарная система 313, используемая для воздушных исследований, может быть различных видов. Например, лидарная система 313 может быть лидарной системой с единичным возвратом или лидарной системой с несколькими возвратами, способной регистрировать несколько возвратов. В этих иллюстративных примерах возврат представляет собой отклик на лазерный импульс.
Кроме того, лидарная система 313 может измерять интенсивность возвратного сигнала каждого возврата. Разумеется, лидарная система 313 может быть реализована с использованием лидарной системы любого типа, подходящей для выполнения воздушных исследований.
В этих иллюстративных примерах датчиковая система 306 может включать некоторое количество датчиковых модулей 314. В этом примере датчиковый модуль из некоторого количества датчиковых модулей 314 является съемным. Иными словами, один датчиковый модуль может быть заменен другим датчиковым модулем из некоторого количества датчиковых модулей 314 датчиковой системы 306 беспилотного воздушного транспортного средства 300.
Таким образом может быть обеспечена конструктивная универсальность беспилотного воздушного транспортного средства 300. В частности, датчиковый модуль из некоторого количества датчиковых модулей 314 может быть выбран для использования в беспилотном воздушном транспортном средстве 300 в зависимости от назначенных ему задачи или задания. Кроме того, при использовании некоторого количества датчиков 314 вес беспилотного воздушного транспортного средства 300 может быть уменьшен путем уменьшения количества датчиков датчиковой системы 306 до количества, необходимого для выполнения конкретных задачи или задания.
Например, датчиковый модуль 316 может содержать некоторое количество датчиков 318. Набор из некоторого количества датчиков 318 может быть выбран для задачи или задания конкретного типа, которые необходимо выполнить. Другие датчики, которые могут быть включены в датчиковую систему 306, включают по меньшей мере один элемент группы, включающей приемник глобальной системы местоопределения, съемочную систему, камеру видимого диапазона, инфракрасную камеру, мультиспектральную камеру, гиперспектральную камеру, радарную систему и датчики других подходящих типов. При использовании радарной системы датчиковая система 306 может быть реализована в виде радарной системы с синтетической апертурой в этих иллюстративных примерах.
Система 308 для обеспечения связи связана с планером 302. Как показано, система 308 для обеспечения связи выполнена с возможностью обеспечения связи между беспилотным воздушным транспортным средством 300 и другим устройством. Другим устройством может быть, например, управляющее устройство 212 для управления исследованием, некоторое количество беспилотных воздушных транспортных средств 214 флота 210, датчиковая система 242 и другие подходящие компоненты, представленные на фиг.2. В этих иллюстративных примерах связь может быть беспроводной. В некоторых случаях может иметься также интерфейс проводной связи.
Источник 312 энергии связан с планером 302 и выполнен с возможностью обеспечения энергией других компонентов беспилотного воздушного транспортного средства 300. Источник 312 энергии может быть различных видов. Например, он может включать по меньшей мере один элемент группы, включающей энергетическую систему 320 и систему 322 для сбора энергии.
В этом иллюстративном примере энергетическая система 320 может включать одну батарею или более. Эти батареи могут быть модульными и сменными. В других иллюстративных примерах энергетическая система 320 может быть по меньшей мере одним элементом группы, включающей топливный элемент, топливо в топливном баке и энергетические системы других подходящих типов.
Система 322 для сбора энергии выполнена с возможностью выработки энергии для компонентов беспилотного воздушного транспортного средства 300 из окружающей среды вокруг него. Например, система 322 для сбора энергии может включать по меньшей мере один элемент группы, включающей солнечный элемент, ветровой турбинный микрогенератор и системы для сбора энергии других подходящих типов, которые вырабатывают энергию из окружающей среды вокруг беспилотного воздушного транспортного средства 300 во время его полета, нахождения на земле или комбинации вышеперечисленного.
В этом иллюстративном примере управляющее устройство 310 связано с планером 302. Как показано, оно может быть аппаратными средствами и может включать программные средства.
Управляющее устройство 310 выполнено с возможностью управления работой беспилотного воздушного транспортного средства 300. Управляющее устройство 310 может иметь уровень интеллекта 324, который может варьироваться в зависимости от конкретной реализации беспилотного воздушного транспортного средства 300. В некоторых иллюстративных примерах управляющее устройство 310 можно рассматривать как часть управляющего устройства 212 для управления исследованием, представленного на фиг.2.
В некоторых случаях уровень интеллекта 324 может быть таким, что управляющее устройство 310 принимает конкретные команды, которые могут включать, например, помимо прочего направление движения, точку маршрута для выработки информации 202, представленной на фиг.2, с использованием датчиковой системы 306 и другие аналогичные команды.
В других иллюстративных примерах уровень интеллекта 324 может быть выше, так что беспилотное воздушное транспортное средство 300 может принимать задание. В этих иллюстративных примерах задание представляет собой выполняемую работу. Задание может быть частью задачи. В этих примерах задание может содержать операции, которые выполняют в рамках указанной работы. Например, заданием может быть просканировать конкретное место в лесу 204, представленном на фиг.2. Еще одним заданием может быть движение к этому конкретному месту в лесу 204.
Управляющее устройство 310 может определять операции, необходимые для выполнения задания. Задание может быть постоянным заданием, согласно которому беспилотное воздушное транспортное средство 300 следует по маршруту в конкретной области с выработкой информации 202 с использованием датчиковой системы 306.
В других иллюстративных примерах уровень интеллекта 324 может быть еще выше, так что беспилотное воздушное транспортное средство 300 выполнено с возможностью связи с другими беспилотными воздушными транспортными средствами для координации выполнения одного задания или более. Например, управляющее устройство 310 может содержать электронную схему, компьютерную программу, систему искусственного интеллекта и осуществлять процессы других подходящих типов, которые могут обеспечивать требуемый уровень интеллекта 324.
В этих иллюстративных примерах уровень интеллекта 324 может обеспечивать интеллектуальная система 328, которая может использовать экспертную систему, нейронную сеть, нечеткую логику и системы других подходящих типов для обеспечения уровня интеллекта 324.
Уровень интеллекта 324 управляющего устройства 310 может обеспечивать реализацию различных функций, например динамическое планирование маршрута. Таким образом могут быть определены препятствия вдоль маршрута и, следовательно, их можно избежать. Такое определение и избежание препятствий может быть выполнено в режиме реального времени. Эти препятствия могут включать, например, помимо прочего еще одно пилотируемое или беспилотное воздушное транспортное средство, склон горы, дерево и другие препятствия.
Управляющее устройство 310 также может осуществлять мониторинг состояния различных систем беспилотного воздушного транспортного средства 300. Например, управляющее устройство 310 может осуществлять мониторинг уровня энергии, имеющейся или остающейся в источнике 312 энергии. Если источник 312 энергии. включает только батареи энергетической системы 320, управляющее устройство 310 может направлять беспилотное воздушное транспортное средство 300 с его возвратом на базу для перезарядки или замены батарей.
Беспилотное воздушное транспортное средство 300, проиллюстрированное на фиг.3, не следует рассматривать как накладывающее ограничения на способ, которым может быть реализовано беспилотное воздушное транспортное средство 300. В других иллюстративных примерах беспилотное воздушное транспортное средство 300 может включать другие компоненты в дополнение к описанным или вместе них.
Например, датчиковая система 306 при необходимости может включать другие компоненты в дополнение к некоторому количеству датчиковых модулей 314. Например, датчиковая система 306 может включать систему для подавления вибраций, охладительную систему, дополнительные источники энергии или другие подходящие компоненты.
Кроме того, хотя датчиковая система 311 была описана как лидарная система 313, она может быть любой датчиковой системой, выполненной с возможностью регистрации электромагнитной энергии. Например, датчиковая система 311 может быть датчиком, связанным с фотоникой, стереографической камерой, лидарной системой, радарной системой, радиочастотной датчиковой системой, электрооптической датчиковой системой или датчиковой системой другого подходящего типа.
Кроме того, хотя система 322 для сбора энергии в этих иллюстративных примерах включена в источник 312 энергии беспилотного воздушного транспортного средства 300, в других иллюстративных примерах она может быть частью зарядной станции. В этом случае система 322 для сбора энергии может быть выполнена с возможностью выработки энергии и с возможностью ее хранения до возврата беспилотного воздушного транспортного средства 300 на зарядную станцию.
Когда беспилотное воздушное транспортное средство 300 используют в составе роя 218, оно может включать в качестве датчиковой системы 306 датчиковую систему другого типа по сравнению с другими беспилотные воздушные транспортные средствами роя 218, представленного на фиг.2. Например, беспилотное воздушное транспортное средство 300 может включать лидарную систему 313, а другое беспилотное воздушное транспортное средство роя 218 может включать радарную систему с синтетической апертурой. В этом случае информация от каждой датчиковой системы каждого беспилотного воздушного транспортного средства роя 218 может быть объединена с использованием способов слияния данных. Таким образом, рой 218 может реализовывать функции различных типов с использованием датчиковых систем различных типов по существу одновременно в зависимости от конкретной реализации.
На фиг.4 проиллюстрирована система для воздушного исследования в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере система 400 для воздушного исследования содержит грузовик 402, пусковую установку 404 беспилотного воздушного транспортного средства, формирователь 406 изображения кругового обзора, управляющее устройство 408 для управления исследованием и беспилотное воздушное транспортное средство 410.
Грузовик 402 обеспечивает мобильность системы 400. Пусковая установка 404 связана с грузовиком 402 и может быть расположена с обеспечением запуска беспилотного воздушного транспортного средства 410 или его приема при приземлении. Формирователь 406 изображения кругового обзора является примером реализации датчиковой системы 242, представленной на фиг.2.
Формирователь 406 изображения кругового обзора может вырабатывать изображения неба, и эти изображения или карты, вырабатываемые им, могут быть использованы управляющим устройством 408 для управления исследованием для выработки маршрута беспилотного воздушного транспортного средства 410 для выполнения исследования над лесом. В этих иллюстративных примерах формирователь 406 изображения кругового обзора может включать программное обеспечение для определения кромки, которое может быть использовано для определения кромок облаков. Определение кромок облаков может быть использовано для более легкого определения места облаков на изображениях, выработанных формирователем 406 изображения кругового обзора.
Систему 400, проиллюстрированную на фиг.4, не следует рассматривать как накладывающую физические или архитектурные ограничения на способ, которым могут быть реализованы различные системы для выполнения воздушного исследования. Например, система для выполнения воздушного исследования, проиллюстрированная на фиг.1, включает компоненты, которые распределены с использованием некоторых компонентов, расположенных в постоянных местах. В других иллюстративных примерах система для выполнения воздушного исследования может быть реализована с использованием других мобильных платформ, например судна, летательного аппарата или платформ других подходящих типов.
На фиг.5 проиллюстрирован маршрут для выполнения воздушного исследования в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере объем 500 представляет собой воздушное пространство, в котором может летать беспилотное воздушное транспортное средство 410 для выработки информации о лесе 502.
В этом иллюстративном примере маршрут 504 является плановым маршрутом беспилотного воздушного транспортного средства 410. Этот маршрут может быть использован, если облачный покров не имеется в виде, препятствующем необходимому сбору информации о лесе 502. В некоторых иллюстративных примерах маршрут 504 может быть выработан с учетом облаков, расположенных над лесом в текущее время, и их прогнозируемого движения.
На фиг.6 проиллюстрирован маршрут беспилотного воздушного транспортного средства через лес в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере облако 600 точек является одним из примеров облака точек, вырабатываемого в отношении леса 502 с использованием маршрута 504 при отсутствии облаков над лесом 502.
В этом иллюстративном примере облачный покров над лесом 502 отсутствует. В результате маршрут 504 не требует регулировки для выработки облака 600 точек. Маршрут 504 является статическим, так как облака отсутствуют.
В результате беспилотное воздушное транспортное средство 410 летит по первоначально выработанному маршруту 504. В этом иллюстративном примере облако 600 точек показано над лесом 502 и является примером информации, которая может быть выработана беспилотным воздушным транспортным средством 410 при полете по маршруту 504 над лесом 502. Разумеется, облако 600 точек является представлением информации, которая может быть выработана, и физически не расположено над лесом 502.
На фиг.7 проиллюстрирован маршрут беспилотного воздушного транспортного средства через лес при наличии облаков в соответствии с одним из иллюстративных вариантов реализации. В этом иллюстративном примере над лесом 502 имеются облака 700, которые могут препятствовать выработке облака 600 точек с необходимым уровнем качества. В результате могут иметься пробелы в облаке 600 точек.
В этом примере показано, что маршрут 504 модифицирован по сравнению с маршрутом 504, представленным на фиг.5, и в этом примере является динамическим. Маршрут 504 можно рассматривать как модификацию маршрута 504 в его первоначальном виде, или он может быть полностью новым маршрутом, вырабатываемым во время полета беспилотного воздушного транспортного средства 410 над лесом 502. В этих иллюстративных примерах облако 600 точек, относящееся к лесу 502, может быть выработано, как необходимо, при модификации маршрута 504, так что он проходит над местами в лесу 502, в которых облака 700 отсутствуют.
Как показано, облака 700 двигаются по направлению стрелки 702 из-за ветра в этой области. В этих иллюстративных примерах маршрут 504 беспилотного воздушного транспортного средства 410 может быть отрегулирован, чтобы он проходил над местами, в которых облака 700 отсутствуют, для выработки информации, относящейся к облаку 600 точек.
На фиг.8 проиллюстрирован еще один маршрут беспилотного воздушного транспортного средства через лес при наличии облаков в соответствии с одним из иллюстративных вариантов реализации. В этом примере облака 700 сместились, так что другие места теперь не покрыты облаками 700. В результате маршрут 504 беспилотного воздушного транспортного средства 410 может быть изменен с получением маршрута 800, так что беспилотное воздушное транспортное средство 410 летит над местами в лесу 502, в которых имеются просветы в облаках 700, для выработки информации, относящейся к облаку 600 точек.
Регулировка маршрута 504 с получением маршрута 800 беспилотного воздушного транспортного средства 410 может быть выполнена динамически с использованием текущей информации об облаках 700. Эта текущая информация может быть выработана посредством датчиковой системы. В других иллюстративных примерах, если информацию об облаках 700 вырабатывают только один раз или не так часто, как необходимо для задания маршрута беспилотного воздушного транспортного средства, могут быть сделаны прогнозы движения облаков 700.
В этих иллюстративных примерах эти прогнозы могут быть сделаны на основании направления движения облаков 700 в соответствии с прогнозами погоды, которые включают информацию о ветрах и количестве облаков, которые могут иметься при выполнении воздушного исследования беспилотным воздушным транспортным средством 410.
В этом иллюстративном примере маршрут 504 и маршрут 800 могут обеспечить увеличение охвата леса 502 при воздушном исследовании. В некоторых иллюстративных примерах маршрут 800 может быть обработан по существу одновременно с маршрутом 504 путем прогнозирования движения облаков 700. Таким образом, сначала беспилотное воздушное транспортное средство 410 летит по маршруту 504, а затем по маршруту 800.
В других иллюстративных примерах условия, связанные с облаками 700, могут измениться перед завершением маршрута 504 в его первоначальном виде. При использовании этого иллюстративного варианта реализации маршрут 504 может быть изменен с получением маршрута 800 или модифицирован другим способом в зависимости от конкретной реализации. Когда облака 700 снова двигаются, маршрут 800 может вернуться к маршруту 504, или управляющее устройство для управления исследованием может выработать другой маршрут в этих иллюстративных примерах. Таким образом, использование нескольких маршрутов обеспечивает выработку оптимальной стратегии плана полета на основании изменений условий облачности в этих иллюстративных примерах.
Различные компоненты, представленные на фиг.1 и фиг.4-8, могут быть объединены с компонентами, представленными на фиг.2-3, использованы с ними или могут сочетаться с ними как комбинация вышеперечисленного. Кроме того, некоторые компоненты, представленные на фиг.1 и фиг.4-8, могут быть иллюстративными примерами того, как компоненты, показанные на фиг.2-3 в виде схемных блоков, могут быть реализованы в качестве физических конструкций.
На фиг.9 проиллюстрирована блок-схема сообщений системы для выполнения воздушного исследования, выполняющей исследование над областью земли, в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере проиллюстрирован информационный поток сообщений между компонентами, используемыми для выполнения воздушного исследования. Различные компоненты, используемые при выполнении воздушного исследования, включают датчиковую систему 900, управляющее устройство 902 для управления исследованием и беспилотное воздушное транспортное средство 904. Эти компоненты являются примерами компонентов среды 200, представленной на фиг.2.
Управляющее устройство 902 для управления исследованием и беспилотное воздушное транспортное средство 904 являются частью системы для выполнения воздушного исследования, которая может выполнять исследование области 906 земли 908. В этом иллюстративном примере земля 908 является лесом. Например, земля 908 также может быть сельскохозяйственной землей, городом, полем или другой подходящей землей.
Датчиковая система 900 направляет информацию об облаках на управляющее устройство 902 для управления исследованием (сообщение M1), которое, в свою очередь, определяет места над земле 908, в которых облака облачного покрова отсутствуют или не препятствуют выработке информации о земле 908 с необходимым уровнем качества. Управляющее устройство 902 для управления исследованием вырабатывает маршрут и направляет его на беспилотное воздушное транспортное средство 904 (сообщение М2), которое летит над областью 906 земли 908, следую по маршруту, принятому от управляющего устройства 902 для управления исследованием. При полете над областью 906 беспилотное воздушное транспортное средство 904 направляет лазерный луч в область 906 (сообщение М3) и принимает отклик на лазерный луч от земли 908 (сообщение М4). Беспилотное воздушное транспортное средство 904 вырабатывает информацию на основании отклика, принятого от области 906 земли 908. Эту информацию направляют на управляющее устройство 902 для управления исследованием (сообщение М5).
Эта последовательность потока сообщений может продолжаться до тех пор, пока не исследована вся область 906. В этих иллюстративных примерах маршрут изменяют по мере изменения облаков над областью 906 на основании информации об облаках, принимаемой от датчиковой системы 900.
Как показано, управляющее устройство 902 для управления исследованием вырабатывает маршруты таким образом, что беспилотное воздушное транспортное средство 904 достигает мест в области 906, которые еще не были исследованы.
На фиг.10 проиллюстрирована блок-схема процесса выработки информации о лесе в соответствии с одним из иллюстративных вариантов реализации. Процесс, проиллюстрированный на фиг.10, может быть реализован с использованием системы 208, представленной на фиг.2.
В этом иллюстративном примере процесс начинается с определения некоторого количества мест в лесу, над которыми лидарная система беспилотного воздушного транспортного средства вырабатывает информацию о лесе с необходимым уровнем качества (операция 1000). Эти места представляют собой места, в которых лидарная система беспилотного воздушного транспортного средства может вырабатывать информацию, относящуюся к облаку точек, в котором эта информация отражает необходимое количество информации о лесе.
Процесс вырабатывает маршрут беспилотного воздушного транспортного средства для его движения к указанному некоторому количеству мест и выработки в них информации о лесе (операция 1002), после чего процесс возвращается к операции 1000. Эти две операции можно повторять до завершения воздушных исследований. В этих иллюстративных примерах вырабатывают маршрут таким образом, что он не изменяется при отсутствии облачного покрова. При наличии или изменении облачного покрова выработка маршрута включает изменение маршрута для учета некоторого количества мест, в которых облаков уже не имеется.
На фиг.11 проиллюстрирована блок-схема процесса выработки маршрута беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации. Процесс, проиллюстрированный на фиг.11, может быть реализован с использованием системы 208, представленной на фиг.2. В частности, процесс, проиллюстрированный на фиг.11, может быть использован для выработки маршрута 232 в виде динамического маршрута 244, представленного на фиг.2.
В этом иллюстративном примере процесс начинается с определения некоторого количества мест, в которых облачный покров не препятствует выработке информации беспилотным воздушным транспортным средством с необходимым уровнем качества (операция 1100). Некоторое количество мест можно изменять каждый раз при выполнении операции 1100. Некоторое количество мест представляет собой одно место или более, в котором облака, образующие облачный покров, имеют некоторое количество просветов, таких что информация, относящаяся к облаку точек, относящемуся к лесу, может быть выработана с необходимым уровнем качества.
Определяют, было ли исследовано какое-либо из определенного некоторого количества мест (операция 1102). Если какое-либо из некоторого количества мест не было исследовано, эти места выбирают как набор неисследованных мест (операция 1104). Используемый здесь термин «набор» применительно к объектам означает один объект или более. Например, набор неисследованных мест означает одно неисследованное место или более. Маршрут модифицируют для движения беспилотного воздушного транспортного средства к набору неисследованных мест (операция 1106).
Далее, беспилотное воздушное транспортное средство сканирует места из набора неисследованных мест в лесу при движении по указанному маршруту (операция 1108). Сканирование выполняют лазерным лучом лидарной системы для выработки информации, относящейся к облаку точек, относящегося к лесу, при полете над набором неисследованных мест. Во время операции 1108 сканирование может быть выполнено с использованием датчика, связанного с фотоникой, стереографической камеры, лидарной системы, радарной системы, радиочастотной датчиковой системы, электрооптической датчиковой системы или датчиковых систем других подходящих типов, которые активно или пассивно регистрируют электромагнитную энергию. Информация, вырабатываемая для создания облака точек, может варьироваться в зависимости от типа используемой датчиковой системы, содержащей датчик электромагнитной энергии. Например, информация может включать изображения и расположение камеры в случае стереографической камеры. Еще в одном примере информацией могут быть показания, связанные с расстоянием, и место датчика, когда датчик представляет собой лидарную систему.
Определяют, покрыто ли в текущий момент некоторым количеством облаков следующее место из набора неисследованных мест на маршруте (операция 1110). Это определение может быть выполнено с использованием информации об облаках от датчиковой системы. Информация об облаках может быть текущей или принимаемой в режиме реального времени от датчиковой системы настолько быстро, насколько она может быть направлена без умышленной задержки. В других случаях на основании информации об облаках могут быть сделаны прогнозы движения облаков, если информация об облаках не обновляется с необходимой частотой.
Если следующее место не покрыто некоторым количеством облаков, процесс возвращается к операции 1108, описанной выше. В противном случае определяют, завершено ли исследование (операция 1112). Исследование завершено в этих иллюстративных примерах, если собрана информация по всей области, определенной для исследования посредством беспилотного воздушного транспортного средства.
Если исследование места не завершено, определяют изменения облачного покрова (операция 1114). Во время операции 1114 определяют некоторое количество новых мест, в которых отсутствует облачный покров.
Определяют, имеются ли в лесу дополнительные неисследованные места на основании изменений облачного покрова (операция 1116).
Дополнительные неисследованные места могут стать доступными для исследования благодаря движению облачного покрова из этих мест. Если в лесу имеются дополнительные неисследованные места, процесс возвращается к операции 1106, описанной выше. В этом случае в соответствии с модифицированным маршрутом беспилотное воздушное транспортное средство может быть инструктировано на полет над этими неисследованными местами и сбор информации об указанном некотором количестве мест.
Если не имеется дополнительных неисследованных мест, определяют, имеет ли беспилотное воздушное транспортное средство достаточно энергии для полета по ждущей схеме (операция 1118). Если беспилотное воздушное транспортное средство имеет достаточно энергии, оно летает по ждущей схеме до появления дополнительных изменений облачного покрова в указанном некотором количестве мест (операция 1120). Затем процесс переходит к операции 1114, описанной выше.
Если беспилотное воздушное транспортное средство не имеет достаточно энергии, оно возвращается на управляющую станцию (операция 1122), после чего процесс завершается. В соответствии с операцией 1102, если места, где облачный покров изменился, уже исследованы, процесс переходит к операции 1112, описанной выше. В соответствии с операцией 1112, если исследование завершено, процесс завершается.
На фиг.12 проиллюстрирована функциональная схема обрабатывающей системы для обработки данных в соответствии с одним из иллюстративных вариантов реализации. Обрабатывающая система 1200 для обработки данных может быть использована для реализации компьютерной системы 222, представленной на фиг.2, управляющего устройства 212 для управления исследованием, представленного на фиг.2, и управляющего устройства 310, представленного на фиг.3. В этом иллюстративном примере обрабатывающая система 1200 содержит среду 1202 для обеспечения связи, которая обеспечивает связь между процессорным блоком 1204, памятью 1206, энергостойким запоминающим устройством 1208, блоком 1210 для обеспечения связи, блоком 1212 ввода-вывода и дисплеем 1414. В этом примере среда для обеспечения связи может представлять собой шинную систему.
Процессорный блок 1204 служит для выполнения инструкций программного обеспечения, которое может быть загружено в память 1206. Процессорный блок 1204 может быть некоторым количеством процессоров, многопроцессорным ядром или процессором другого типа в зависимости от конкретной реализации.
Память 1206 и энергостойкое запоминающее устройство 1208 являются примерами запоминающих устройств 1216. Запоминающее устройство представляет собой любой элемент аппаратных средств, способный хранить информацию, например помимо прочего данные, программный код в функциональной форме и/или другую подходящую -информацию, на временной и/или постоянной основе. Запоминающие устройства 1216 в этих примерах также могут называться машиночитаемые запоминающие устройства. Память 1206 в этих примерах может быть, например, памятью с произвольным доступом или "любым другим подходящим энергозависимым или энергонезависимым запоминающим устройством. Энергостойкое запоминающее устройство 1208 может быть различных видов в зависимости от конкретной реализации.
Например, энергостойкое запоминающее устройство 1208 может содержать один компонент или более или одно устройство или более. Например, энергостойкое запоминающее устройство 1208 может быть жестким диском, флэш-памятью, перезаписываемым оптическим диском, перезаписываемой магнитной лентой или комбинацией вышеперечисленного. Носители, используемые в качестве энергостойкого запоминающего устройства 1208, также могут быть съемными. Например, в качестве энергостойкого запоминающего устройства 1208 может быть использован съемный жесткий диск.
Блок 1210 для обеспечения связи в этих иллюстративных примерах обеспечивает связь с другими обрабатывающими системами для обработки данных или устройствами. В этих иллюстративных примерах блок 1210 для обеспечения связи представляет собой сетевую карту.
Блок 1212 ввода-вывода обеспечивает ввод и вывод данных в отношении других устройств, которые могут быть соединены с обрабатывающей системой 1200. Например, блок 1212 ввода-вывода может обеспечивать соединение для получения пользовательской входной информации через клавиатуру, мышь и/или другие подходящие устройства ввода. Кроме того, блок 1212 ввода-вывода может направлять выходную информацию на принтер. Дисплей 1214 обеспечивает механизм для отображения информации для пользователя.
Инструкции операционной системы, приложений и/или программ могут быть расположены в запоминающих устройствах 1216, связанных с процессорным блоком 1204 через среду 1202 для обеспечения связи. Процессы в соответствии с различными вариантами реализации могут быть выполнены процессорным блоком 1204 с использованием выполняемых компьютером инструкций, которые могут быть расположены в памяти, например в памяти 1206.
Эти инструкции называют программным кодом, используемым компьютером программным кодом или машиночитаемым программным кодом, который может быть прочитан и выполнен процессором процессорного блока 1204. Программный код в различных вариантах реализации может быть реализован на различных физических или машиночитаемых запоминающих носителях, например в памяти 1206 или в энергостойком запоминающем устройстве 1208.
Программный код 1218 расположен в функциональной форме на машиночитаемом носителе 1220, который при необходимости является съемным, и может быть загружен или перемещен в обрабатывающую систему 1200 для выполнения процессорным блоком 1204. В этих иллюстративных примерах программный код 1218 и машиночитаемый носитель 1220 образуют программный продукт 1222. В одном из примеров машиночитаемый носитель 1220 может быть машиночитаемым запоминающем носителем 1224 или машиночитаемым сигнальным носителем 1226.
В этих иллюстративных примерах машиночитаемый запоминающий носитель 1224 представляет собой физическое или материальное запоминающее устройство, используемое для хранения программного кода 1218, а не носитель, который распространяет или передает программный код 1218.
В другом случае программный код 1218 может быть перемещен в обрабатывающую систему 1200 с использованием машиночитаемого сигнального носителя 1226, который может быть, например, распространяемым сигналом с данными, содержащим программный код 1218. Например, машиночитаемый сигнальный носитель 1226 может быть электромагнитным сигналом, оптическим сигналом и/или сигналом другого подходящего типа. Эти сигналы могут быть переданы по линиям связи, например по беспроводным линиям связи, оптоволоконному кабелю, коаксиальному кабелю, проводнику и/или по линии связи любого другого подходящего типа.
Различные проиллюстрированные компоненты обрабатывающей системы 1200 не следует рассматривать как накладывающие архитектурные ограничения на способ, которым могут быть реализованы различные варианты реализации. В обрабатывающей системе для обработки данных могут быть реализованы различные иллюстративные варианты реализации, включая те, которые содержат компоненты в дополнение к проиллюстрированным применительно к обрабатывающей системе 1200 или вместо них. Другие компоненты, представленные на фиг.12, могут отличаться от показанных иллюстративных примеров. Могут быть реализованы различные варианты реализации с использованием аппаратных устройств и систем, способных запускать программный код 1218.
Таким образом, посредством одного иллюстративного варианта реализации или более воздушное исследование леса может быть выполнено более эффективно, чем посредством известных способов, при наличии над лесом облаков. Посредством иллюстративного варианта реализации воздушное исследование может быть выполнено как часть задачи инвентаризации леса для определения информации о лесе. В этих иллюстративных примерах воздушное исследование может быть выполнено для выработки облака точек, относящегося к лесу. В одном из иллюстративных примеров управляющее устройство для управления исследованием выполнено с возможностью выработки маршрута беспилотного воздушного транспортного средства с лидарной системой. Управляющее устройство для управления исследованием выполнено с возможностью выработки маршрута динамически. При выработке маршрута динамически первоначальный маршрут может быть выработан на основании текущего облачного покрова. В соответствии с этим маршрутом беспилотное воздушное транспортное средство может двигаться над местами, где отсутствуют облака или где облака обеспечивают выработку облака точек над лесом с необходимым уровнем качества. Кроме того, система для выполнения воздушного исследования может двигаться над местами, земля в которых выбрана из одного из элементов группы, включающей лес, город, ферму, пустыню, гору и прерию.
В одном иллюстративном примере или более управляющее устройство для управления исследованием может продолжать выработку маршрута при наличии изменений облачного покрова над лесом. Эта выработка может включать регулировку маршрута по мере движения облаков и изменения мест, где облака отсутствуют. Как описано выше, определение изменений места облаков может быть выполнено с использованием информации об облаках, вырабатываемой датчиковой системой. Информацию об облаках можно принимать в режиме реального времени. В других случаях может быть использована более ранняя информация об облаках, и может быть сделан прогноз движения облаков на основании погодных условий, таких как ветер и другие подходящие условия. Таким образом, могут быть исследованы большие части леса с выработкой более полного облака точек по сравнению с используемыми в настоящее время способами, не адаптирующими маршрут воздушного транспортного средства.
Таким образом, один иллюстративный вариант реализации или более может уменьшить стоимость выполнения воздушного исследования, что может быть обеспечено меньшим количеством переносов воздушного исследования из-за облачного покрова. Использование датчиковой системы может быть оптимизировано, так как она может быть использована больше дней в году, чем используемые в настоящее время системы, не работающие, как необходимо, при наличии облачного покрова. Кроме того, иллюстративные варианты реализации также могут обеспечить более полное облако точек, относящееся к лесу, путем изменения маршрута беспилотного воздушного транспортного средства для использования преимуществ мест, в которых отсутствуют облака. Кроме того, учитывая движение облаков, так как места, где отсутствуют облака, могут смещаться, беспилотное воздушное транспортное средство может исследовать весь лес.
При использовании иллюстративного варианта реализации задача инвентаризации леса может быть выполнена более полно, точно и экономно. В результате лесопользование может быть усовершенствовано с использованием информации, вырабатываемой системой для выполнения воздушного исследования.
Описание различных иллюстративных вариантов реализации представлено в целях иллюстрации и описания и не является исчерпывающим или ограниченным указанными вариантами реализации в раскрытой форме. Для специалистов очевидны различные модификации и изменения. Кроме того, различные иллюстративные варианты реализации могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации. Эти варианты реализации, или выбранные варианты реализации, выбраны и описаны для наилучшего объяснения их принципов, практического использования, а также, чтобы позволить другим специалистам понять описание различных вариантов реализации с различными модификациями с точки зрения их пригодности к конкретному предполагаемому использованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЙ В ОТНОШЕНИИ ДЕРЕВА | 2013 |
|
RU2652482C2 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УХУДШЕНИЯ ЛИДАРНЫХ ДАННЫХ | 2021 |
|
RU2826476C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2021 |
|
RU2824434C2 |
| Способы и системы для формирования обучающих данных для обнаружения горизонта и плоскости дороги | 2020 |
|
RU2767838C1 |
| АКТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА С ПЕРЕМЕННЫМ РАЗРЕШЕНИЕМ | 2016 |
|
RU2721304C2 |
| Способ и система для определения траектории автономного транспортного средства | 2023 |
|
RU2821107C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2024 |
|
RU2839125C1 |
| Способ управления бортовыми системами беспилотных транспортных средств при помощи нейронных сетей на основе архитектуры трансформеров | 2024 |
|
RU2841111C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
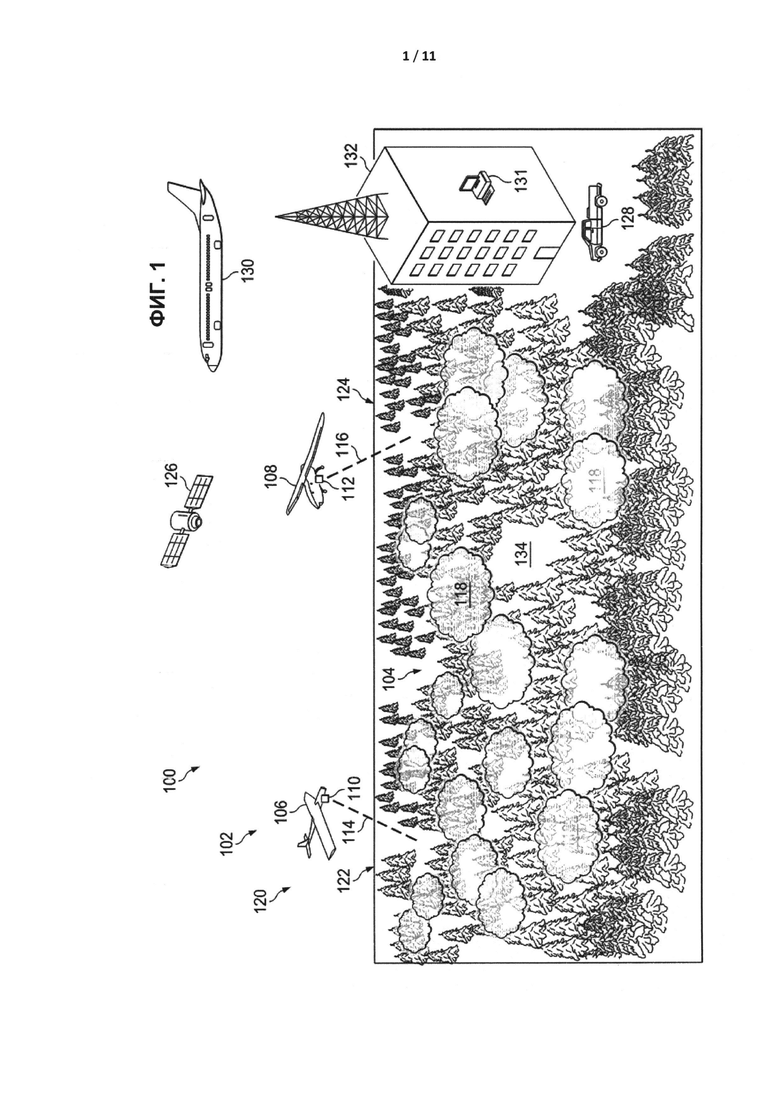
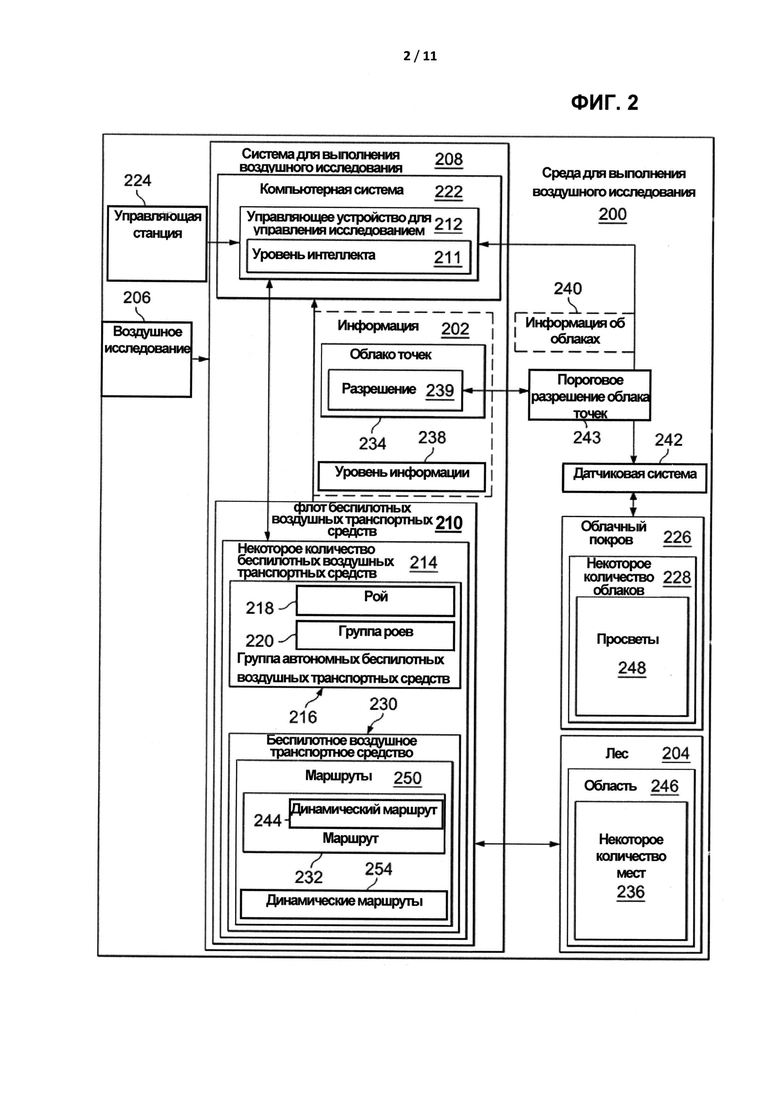
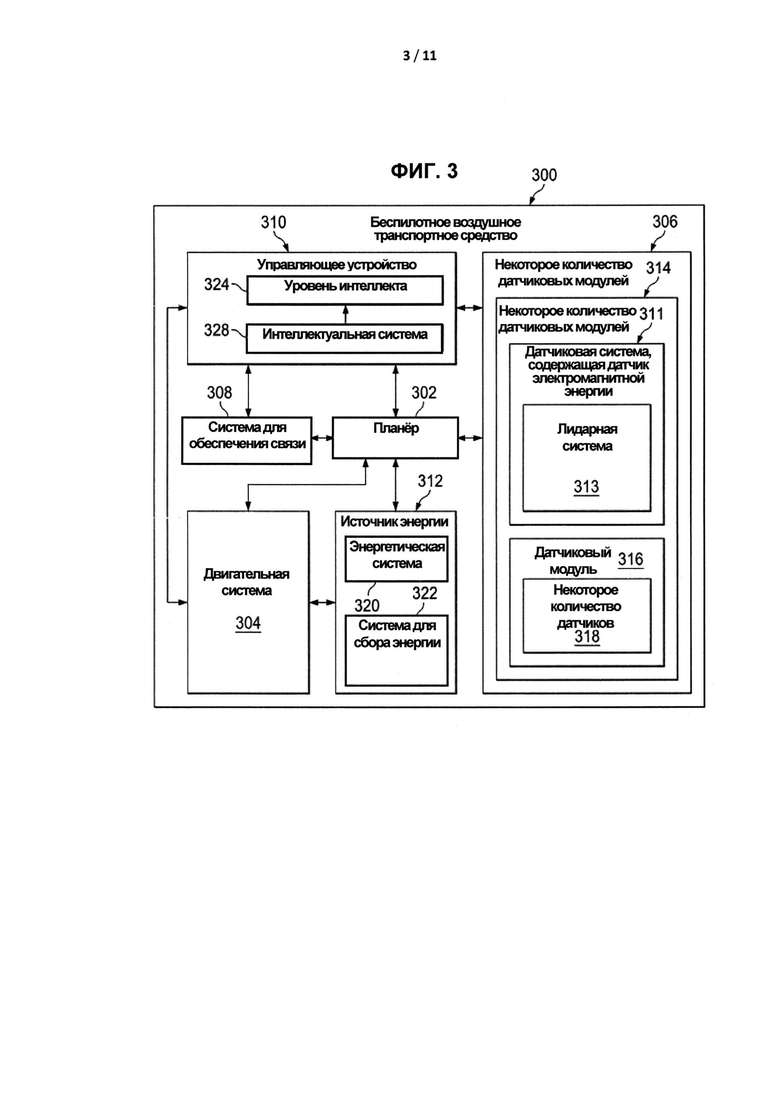
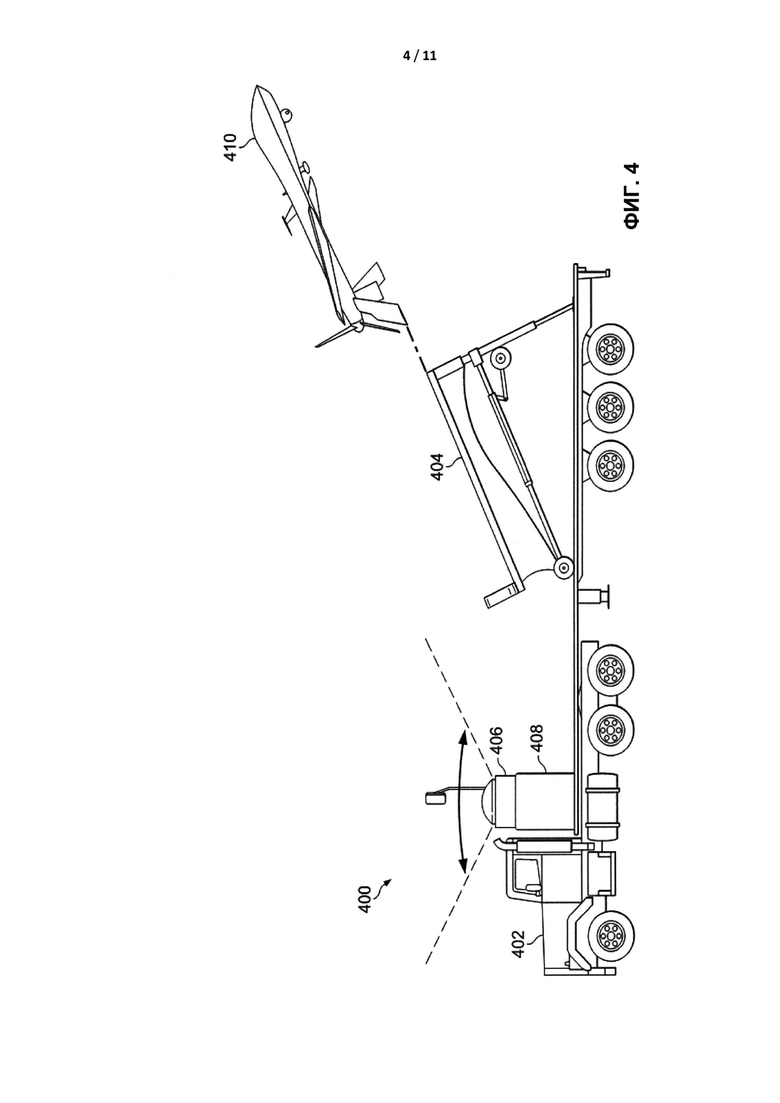
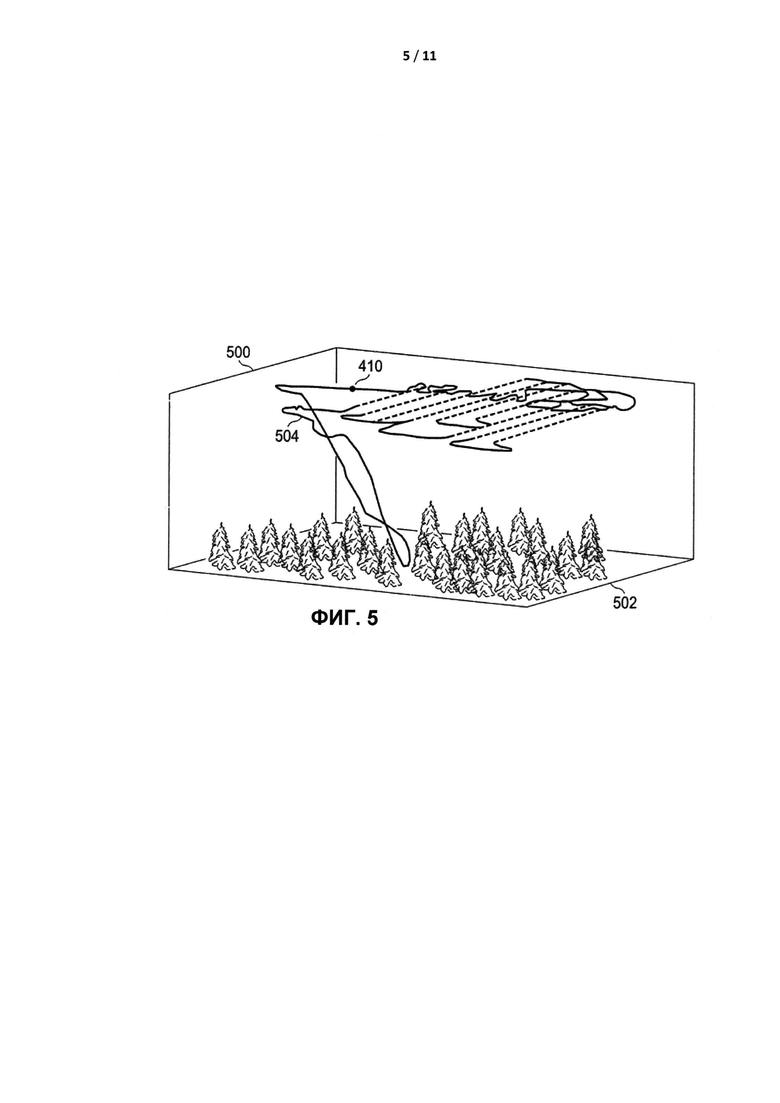
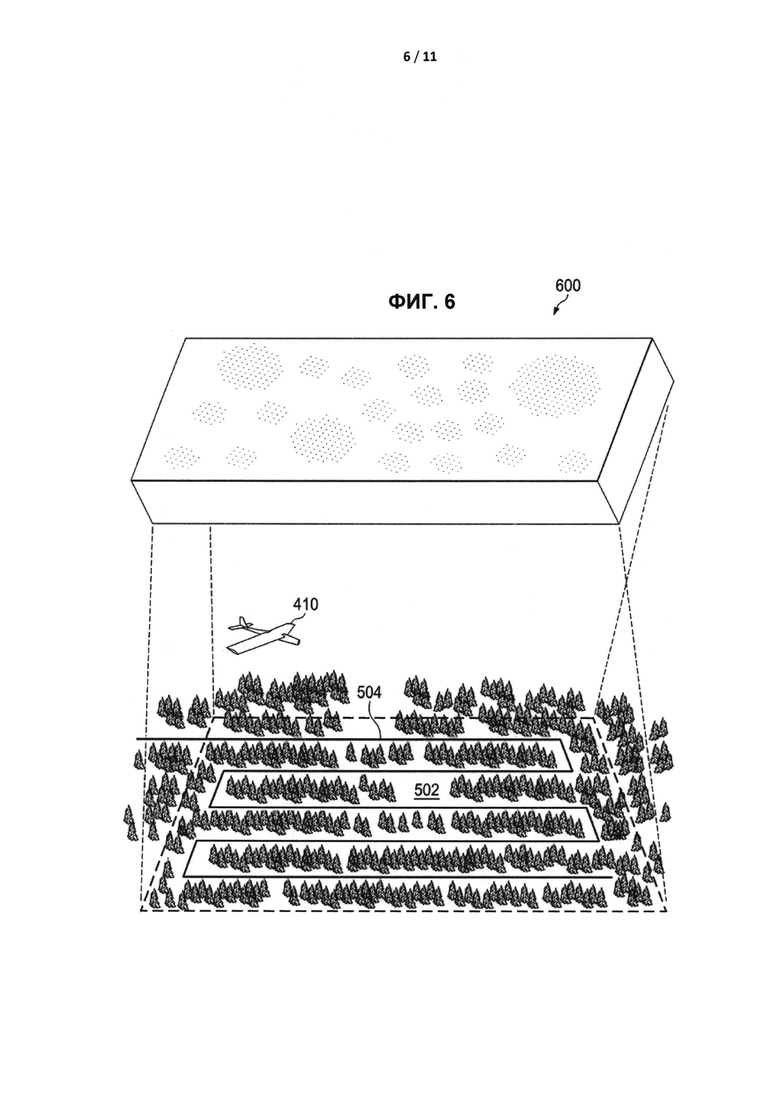
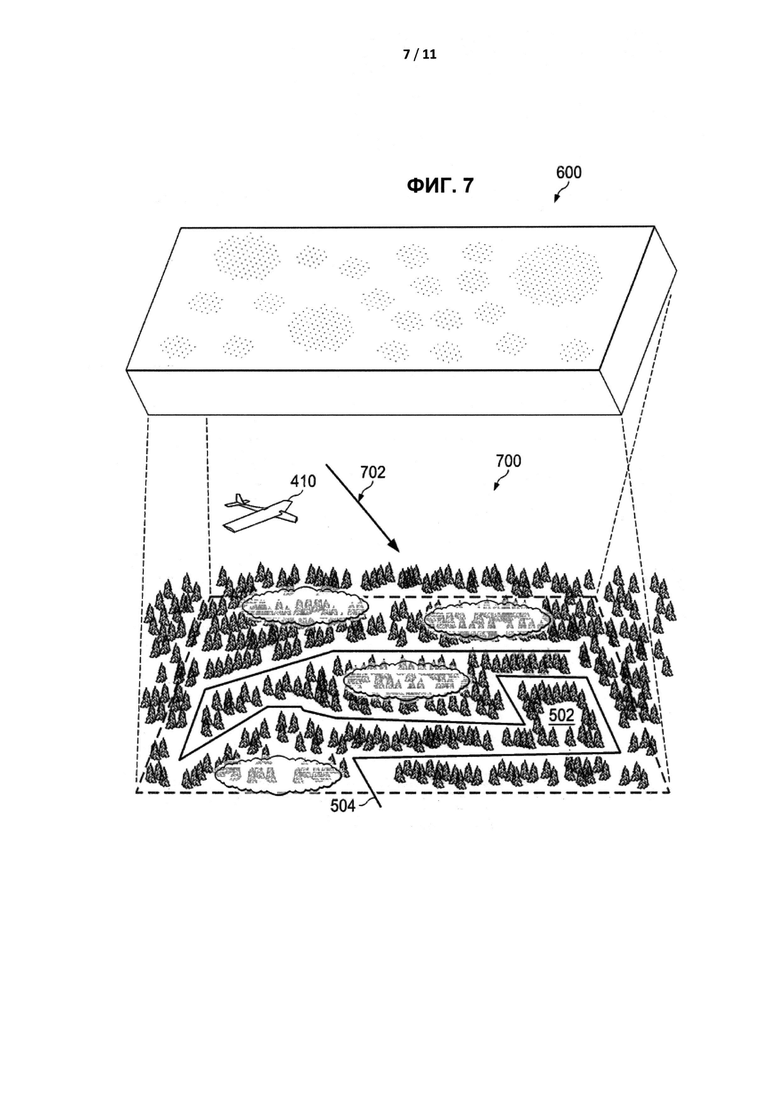
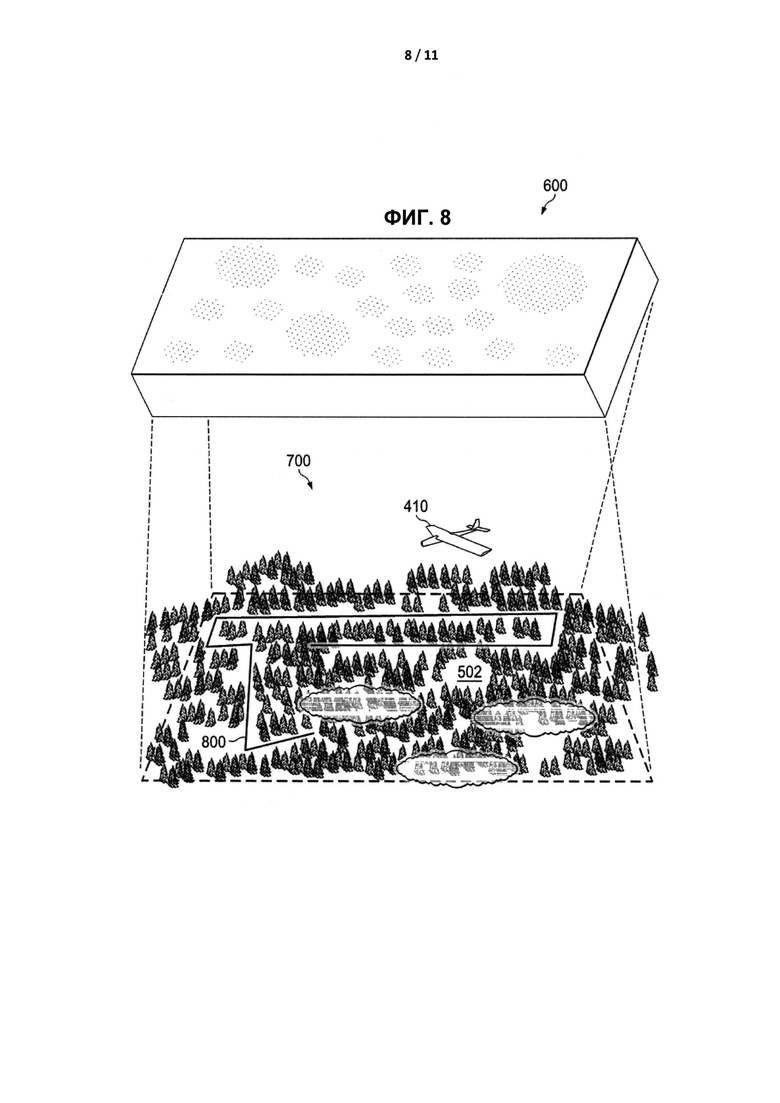
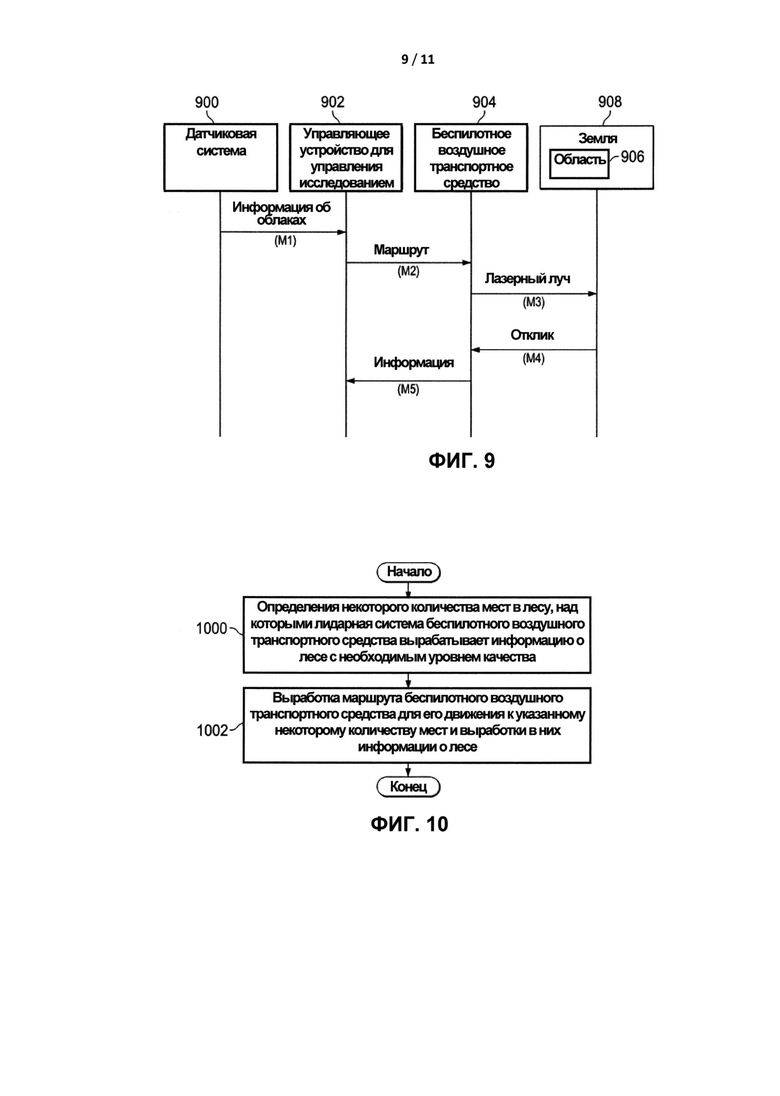
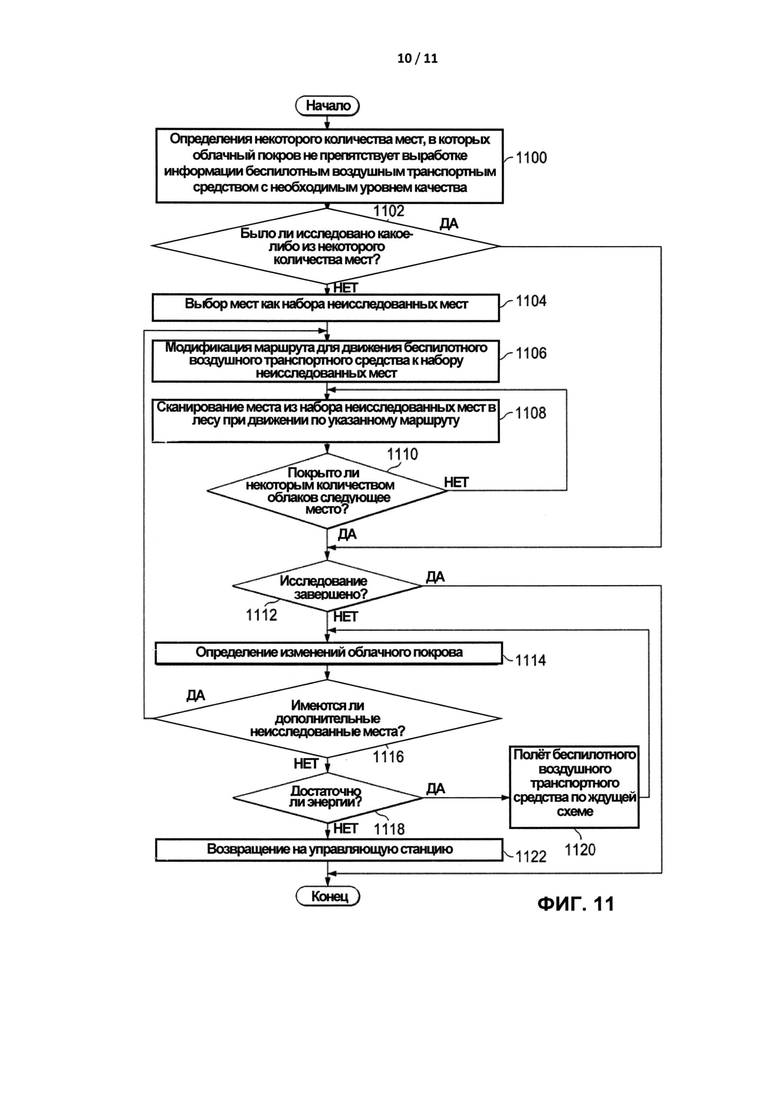
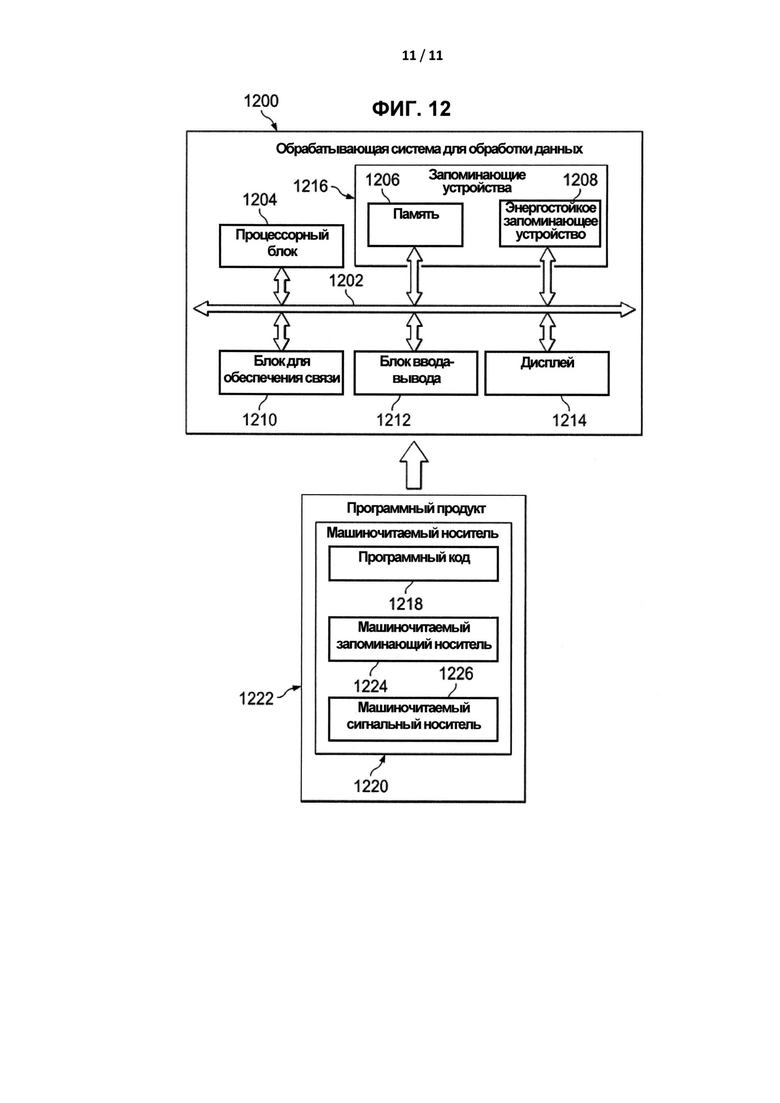
Предложены способ и системы для выработки информации о лесе (204). При этом определяют некоторое количество мест (236) в лесу (204), над которыми датчиковая система (311), содержащая датчик электромагнитной энергии, беспилотного воздушного транспортного средства (230) вырабатывает информацию о лесе (204) путем выработки облака (234) точек с разрешением (239), удовлетворяющим пороговому разрешению (243) облака точек. Вырабатывают маршрут (232) беспилотного воздушного транспортного средства (230) для его движения к указанному некоторому количеству мест (236) и выработки информации о лесе (204) в указанном некотором количестве мест (236). Группа изобретений направлена на сокращение времени выработки информации о лесе. 3 н. и 16 з.п. ф-лы, 12 ил.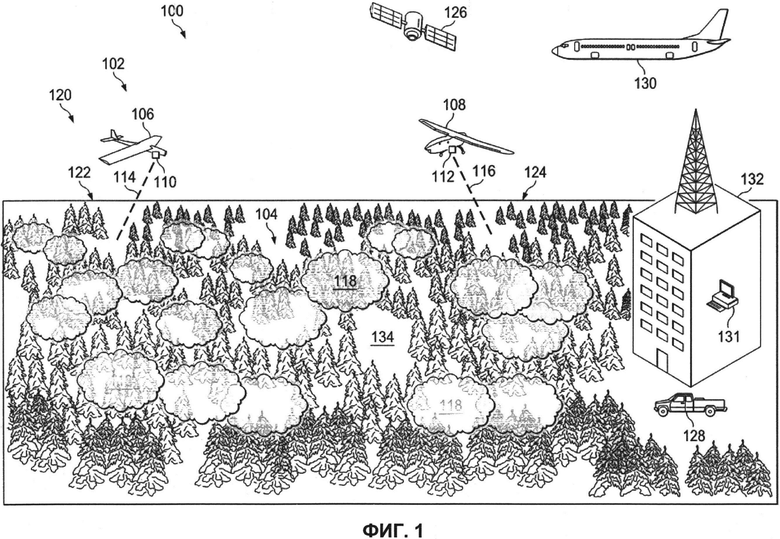
1. Система выработки информации о лесе, содержащая беспилотное воздушное транспортное средство (230);
датчиковую систему (311), содержащую датчик электромагнитной энергии, связанную с беспилотным воздушным транспортным средством (230) и выполненную с возможностью выработки информации (202) о лесе (204); и
управляющее устройство (212) для управления исследованием, выполненное с возможностью определения некоторого количества мест (236) над лесом (204), в которых уровень (238) информации, относящийся к информации о лесе (204), вырабатываемой датчиковой системой (311), содержащей датчик электромагнитной энергии, уменьшен посредством влияния облачного покрова (226), выработки маршрута (232) беспилотного воздушного транспортного средства (230) для его движения к указанному некоторому количеству мест (236) и динамического изменения маршрута при возникновении изменений в облачном покрове над лесом, причем маршрут основан на текущем месте некоторого количества облаков и на прогнозе их движения.
2. Система по п. 1, в которой управляющее устройство (212) выполнено с возможностью управления движением беспилотного воздушного транспортного средства (230) над указанным некоторым количеством мест (236) с использованием указанного маршрута (232) и с возможностью управления выработкой информации о лесе (204) в указанном некотором количестве мест (236).
3. Система по п. 1, в которой управляющее устройство (212) выполнено с возможностью определения изменения указанного некоторого количества мест (236) на основании изменения облачного покрова (226) над лесом (204).
4. Система по п. 1, в которой управляющее устройство (212) выполнено с возможностью определения указанного некоторого количества мест (236) с использованием информации (240) об облаках, относящейся к облакам (228) над лесом (204).
5. Система по п. 4, в которой информацию (240) об облаках вырабатывает датчиковая система (242), выбранная по меньшей мере из одного элемента группы, включающей спутник (126), формирователь изображения кругового обзора, съемочную систему на беспилотном воздушном транспортном средстве (230), съемочную систему на летательном аппарате и радарную систему.
6. Система по п. 3, в которой маршрут (232) представляет собой трехмерный маршрут (232) и обеспечена возможность его изменения в трехмерной системе координат для уменьшения влияния облачного покрова (226) на уровень (238) информации, относящийся к информации, вырабатываемой датчиковой системой (311), содержащей датчик электромагнитной энергии.
7. Система по п. 1, дополнительно содержащая
датчиковую систему (242), связанную с беспилотным воздушным транспортным средством (230), причем датчиковая система (311), содержащая датчик электромагнитной энергии, является частью этой датчиковой системы (242), которая дополнительно содержит съемочную систему и приемник глобальной системы местоопределения.
8. Система по п. 1, в которой датчиковая система (311), содержащая датчик электромагнитной энергии, выбрана по меньше мере из одного элемента группы, включающей датчик, связанный с фотоникой, стереографическую камеру, лидарную систему, радарную систему, радиочастотную датчиковую систему и электрооптическую датчиковую систему (311).
9. Система по п. 1, в которой управляющее устройство (212) расположено по меньшей мере в одном элементе группы, включающей беспилотное воздушное транспортное средство (230) и компьютерную систему (222), расположенную в удаленном месте.
10. Система (208) для выполнения воздушного исследования области (246) земли, содержащая флот (210) беспилотных воздушных транспортных средств; и
управляющее устройство (212) для управления исследованием, выполненное с возможностью
управления выработкой информации о некотором количестве мест (236) в области (246) земли на основании облачного покрова (226) над некоторым количеством мест (236),
определения некоторого количества мест (236), в которых уровень (238) информации, относящийся к области (246) земли, вырабатываемой датчиковой системой (311), содержащей датчик электромагнитной энергии, уменьшен посредством влияния облачного покрова (226),
выработки маршрутов (232) флота (210) беспилотных воздушных транспортных средств для его движения к указанному некоторому количеству мест (236) и
динамического изменения маршрутов при возникновении изменений в облачном покрове над областью (246) земли, причем маршруты основаны на текущем месте некоторого количества облаков и на прогнозе их движения.
11. Система (208) по п. 10, в которой управляющее устройство (212) расположено по меньшей мере в одном элементе группы, включающей флот (210) беспилотных воздушных транспортных средств и управляющую станцию (132).
12. Система (208) по п. 10, в которой флот (210) беспилотных воздушных транспортных средств выбран из одного из элементов группы, включающей беспилотное воздушное транспортное средство (230) и группу автономных беспилотных воздушных транспортных средств (216).
13. Система (208) по п. 12, в которой группа автономных беспилотных воздушных транспортных средств (216) выполнена с возможностью работы в качестве роя (218) при выработке информации о некотором количестве мест (236) в области (246) земли.
14. Система (208) по п. 10, в которой область (246) земли выбрана из одного из элементов группы, включающей лес (204), город, ферму, пустыню, гору и прерию.
15. Способ выработки информации о лесе (204), включающий
определение некоторого количества мест (236) в лесу (204), над которыми датчиковая система (311), содержащая датчик электромагнитной энергии, беспилотного воздушного транспортного средства (230) вырабатывает информацию о лесе (204) путем выработки облака (234) точек с разрешением (239), удовлетворяющим пороговому разрешению (243) облака точек (234), и в которых уровень (238) информации, относящийся к информации о лесе, вырабатываемой датчиковой системой (311), содержащей датчик электромагнитной энергии, уменьшен посредством влияния облачного покрова (226);
выработку маршрута (232) беспилотного воздушного транспортного средства (230) для его движения к указанному некоторому количеству мест (236) и выработки информации о лесе (204) в указанном некотором количестве мест (236); и
динамическое изменение маршрута при возникновении изменений в облачном покрове над лесом, причем маршрут основан на текущем месте некоторого количества облаков и на прогнозе их движения.
16. Способ по п. 15, дополнительно включающий выработку информации о лесе (204) в некотором количестве мест (236).
17. Способ по п. 16, в котором информация представляет собой облако (234) точек.
18. Способ по п. 17, дополнительно включающий
определение указанного некоторого количества мест (236) с использованием информации (240) об облаках, относящейся к облакам (228) над лесом (204).
19. Способ по п. 18, дополнительно содержащий прием информации (240) об облаках от датчиковой системы (242).
| US 20110295575 A1, 01.12.2011 | |||
| US 20090094079 A1, 09.04.2009 | |||
| Сигнальный знак для геодезических и рекогносцировочных работ | 1949 |
|
SU81576A1 |

