Область техники
Настоящее изобретение в целом относится к измерениям в отношении лесов, а в частности относится к выполнению измерений в отношении леса под пологом леса. Еще более конкретно, настоящее изобретение относится к способу и устройствам для выполнения измерений в отношении деревьев с использованием датчиковых систем.
Уровень техники
Лесопользование является подразделом лесоводства и включает различные аспекты. Эти аспекты могут включать экологический, экономический, административный, правовой и социальный аспекты осуществления лесопользования. Лесопользование может включать различные технологии, такие как лесозаготовка, посадка деревьев, повторная посадка деревьев, прорубка дорог и проходов через леса, предотвращение лесных пожаров, поддержание здоровья леса и другие подходящие мероприятия.
При выполнении этих и других операций лесопользования может быть выполнена инвентаризация леса для сбора информации о лесе, которая может потребоваться. Инвентаризация леса представляет собой определение информации о лесе для оценки или анализа.
Например, инвентаризация леса обеспечивает возможность анализа состояния леса, а также возможность определения операций, которые могут быть выполнены. Эта информация может быть использована для определения типов деревьев, высоты деревьев, возраста деревьев, ценности деревьев и другой подходящей информации о деревьях леса. Например, путем инвентаризации леса может быть определено количество деревьев на акр. Кроме того, инвентаризация леса может быть использована для определения другой информации, например о растительности, живой природе леса или о том и о другом.
Эти операции, которые могут быть выполнены с использованием инвентаризации леса, могут включать, например, по меньшей один элемент группы, включающей повторную посадку деревьев, заготовку деревьев, мероприятия по улучшению состояния лесостоя, например подрезание и лечение деревьев, уничтожение вредителей, выработку оповещений о пожароопасных условиях и другие подходящие операции. Используемая здесь фраза «по меньшей мере один из» применительно к списку объектов означает различные комбинации одного объекта списка или более, которые могут быть использованы, при этом каждый объект списка может быть необходим только в количестве одной штуки. Например, фраза «по меньшей мере один из таких объектов, как объекты А, В и С» может включать помимо прочего объект А или объекты А и В. Этот пример также может включать объекты А, В и С или объекты В и С. В других примерах «по меньшей мере один из» может быть, например, помимо прочего двумя объектами А, одним объектом В и десятью объектами С; четырьмя объектами В и семью объектами С и другими подходящими комбинациями.
Одним из способов, которым может быть получена информация о лесе в рамках инвентаризации леса, является выполнение воздушных исследований. Хотя использование пилотируемых и беспилотных воздушных транспортных средств может обеспечить информацию о лесе, измерения в отношении леса этого типа не могут обеспечить достаточно информации. Воздушные исследования обычно неспособны выработать информацию о части леса под пологом. Полог леса представляет собой верхнюю часть листвы леса. Полог может быть образован кронами деревьев леса. Такая информация, как высота деревьев и количество деревьев, может быть получена с использованием воздушных исследований. Однако другая информация, например информация о диаметре деревьев, сбеге деревьев, дефектах деревьев и повреждениях деревьев не может быть получена так же легко с использованием воздушных исследований.
В настоящее время для выполнения измерений диаметров дерева, а также других измерений в отношении частей деревьев под пологом в лес направляют персонал. Сбор информации обо всех деревьях леса с использованием персонала может быть чрезвычайно дорогим и нецелесообразным с точки зрения времени и трудности достижения деревьев на ландшафте различных типов, В результате измерения выполняют только в отношении некоторых деревьев для выработки выборки в отношении деревьев леса. Диаметр других деревьев может быть оценен путем экстраполяции на основании полученных на земле выборок или путем использования эмпирической регрессионной модели в отношении возраста и высоты деревьев, измеренных путем воздушных исследований.
Направление персонала на полевые исследования для измерения диаметра деревьев может занимать много времени и являться дорогим. Оценка диаметра дерева с использованием информации о высоте дерева может привести к неточностям, которые могут препятствовать обеспечению необходимого уровня информации для оценки количества деревьев леса для целей заготовки или поддержания состояния.
В некоторых иллюстративных примерах может быть сделана большая выборка деревьев с использованием наземных исследований, выполняемых с земли с использованием наземных лидарных систем, управляемых оператором. Системы этих типов являются системами, работающими в зоне прямой видимости, и требуют наличия прямой видимости между лидарной системой и деревом, в отношении которого проводят измерения. В результате персоналу также необходимо выходить на полевые исследования и ходить по лесу для выполнения измерений. Измерения этого типа также требуют значительного времени и могут быть более дорогими, чем требуется для получения информации необходимого качества о деревьях.
Следовательно, необходимы способ и устройство, решающие по меньшей мере некоторые из вышеописанных проблем, а также другие возможные проблемы.
Раскрытие изобретения
В одном из иллюстративных вариантов реализации устройство содержит беспилотное воздушное транспортное средство, датчиковую систему и управляющее устройство. Датчиковая система связана с беспилотным воздушным транспортным средством и выполнена с возможностью выработки информации о препятствии и информации об измерениях в отношении дерева. Управляющее устройство выполнено с возможностью определения препятствий на основании информации о препятствии, вырабатываемой датчиковой системой при полете беспилотного воздушного транспортного средства через группу деревьев для выработки информации об измерениях в отношении дерева, относящейся к этой группе деревьев, и с возможностью управления движением беспилотного воздушного транспортного средства для избегания препятствий.
Еще в одном из иллюстративных вариантов реализации измерительная система для измерений в отношении дерева содержит беспилотное воздушное транспортное средство, съемочную систему, лидарную систему и управляющее устройство. Съемочная система связана с беспилотным воздушным транспортным средством и выполнена с возможностью выработки изображений. Лидарная система связана с беспилотным воздушным транспортным средством и выполнена с возможностью выработки показаний, относящихся к расстоянию от беспилотного воздушного транспортного средства до точек на группе деревьев. Управляющее устройство выполнено с возможностью определения препятствий на основании изображений, вырабатываемых съемочной системой при полете беспилотного воздушного транспортного средства через группу деревьев для выработки информации о диаметре, относящейся к этой группе деревьев, и с возможностью управления движением беспилотного воздушного транспортного средства через группу деревьев для избегания препятствий во время выработки лидарной системой указанной информации о диаметре.
Еще в одном из иллюстративных вариантов реализации предложен способ определения некоторого количества диаметров группы деревьев. В соответствии со способом, обеспечивают движение беспилотного воздушного транспортного средства по маршруту через группу деревьев на высоте, обеспечивающей возможность измерения указанного некоторого количества диаметров группы деревьев посредством датчиковой системы, связанной с беспилотным воздушным транспортным средством. Далее, вырабатывают информацию об указанном некотором количестве диаметров группы деревьев с использованием датчиковой системы, связанной с беспилотным воздушным транспортным средством.
Указанные признаки и функции могут быть реализованы независимо в различных вариантах реализации настоящего изобретения или могу г быть объединены в других вариантах реализации, которые подробно описаны в нижеследующем описании с учетом чертежей.
Краткое описание чертежей
Новые признаки, которые рассматриваются как отличительные признаки иллюстративных вариантов реализации, представлены в приложенной формуле. Однако иллюстративные варианты реализации, а также предпочтительные способы использования, другие задачи и признаки, направленные на их решение, будут ясны из нижеследующего подробного описания иллюстративного варианта реализации настоящего изобретения, рассматриваемого совместно с сопроводительными чертежами, из которых:
Фиг.1 иллюстрирует измерительную среду для выполнения измерений в отношении дерева в соответствии с одним из иллюстративных вариантов реализации;
Фиг.2 иллюстрирует функциональную схему измерительной среды для выполнения измерений в отношении дерева в соответствии с одним из иллюстративных вариантов реализации;
Фиг.3 иллюстрирует функциональную схему беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации;
Фиг.4 иллюстрирует функциональную схему датчиков датчиковой системы для беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации;
Фиг.5 иллюстрирует различные размеры беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации;
Фиг.6 иллюстрирует беспилотное воздушное транспортное средство, вырабатывающее информацию об измерениях в отношении дерева, в соответствии с одним из иллюстративных вариантов реализации;
Фиг.7 иллюстрирует беспилотное воздушное транспортное средство, выполняющее измерения, в соответствии с одним из иллюстративных вариантов реализации;
Фиг.8 иллюстрирует беспилотное воздушное транспортное средство, летящее между рядами деревьев, в соответствии с одним из иллюстративных вариантов реализации;
Фиг.9 иллюстрирует беспилотное воздушное транспортное средство в соответствии с одним из иллюстративных вариантов реализации;
Фиг.10 иллюстрирует блок-схему процесса выработки информации об измерениях в отношении дерева в соответствии с одним из иллюстративных вариантов реализации;
Фиг.11 иллюстрирует блок-схему процесса анализа изображений для определения диаметров в соответствии с одним из иллюстративных вариантов реализации;
Фиг.12 иллюстрирует блок-схему процесса определения диаметра дерева в соответствии с одним из иллюстративных вариантов реализации;
Фиг.13 иллюстрирует калибровочную матрицу камеры в соответствии с одним из иллюстративных вариантов реализации; и
Фиг.14 иллюстрирует функциональную схему обрабатывающей системы для обработки данных в соответствии с одним из иллюстративных вариантов реализации.
Подробное описание изобретения
Иллюстративные варианты реализации учитывают по меньшей мере одно обстоятельство. Например, иллюстративные варианты реализации учитывают, что беспилотное воздушное транспортное средство может быть использовано для полета через деревья под пологом для выполнения исследования с определением диаметров деревьев. Иллюстративные варианты реализации также учитывают, что многие лидарные системы, используемые как для воздушных, так и для наземных исследований, могут быть тяжелее, чем требуется для их использования на беспилотном воздушном транспортном средстве, которое может быть использовано для полета между деревьями, а не над кронами деревьев. Иллюстративные варианты реализации учитывают, что размер и вес лидарной системы может быть уменьшен таким образом, что необходимый уровень качества вырабатываемой информации о деревьях тем не менее обеспечен.
В одном из иллюстративных примеров устройство содержит беспилотное воздушное транспортное средство, датчиковую систему и управляющее устройство. Датчиковая система связана с беспилотным воздушным транспортным средством и выполнена с возможностью выработки информации о препятствиях и информации об измерениях в отношении дерева. Управляющее устройство выполнено с возможностью определения препятствий на основании информации о препятствии, вырабатываемой датчиковой системой при полете беспилотного воздушного транспортного средства на уровне по отношению к группе деревьев для выработки информации о диаметре, относящейся к этой группе деревьев, и с возможностью управления движением беспилотного воздушного транспортного средства для избегания препятствий.
В этих иллюстративных примерах размер датчиковой системы может быть уменьшен через то, каким способом вырабатывают информацию о диаметре, относящуюся к деревьям.
На фиг.1 проиллюстрирована измерительная среда для выполнения измерений в отношении дерева в соответствии с одним из иллюстративных вариантов реализации. В этом иллюстративном примере измерительная среда 100 для выполнения измерений в отношении дерева включает группу деревьев 104. Для выполнения измерений в отношении группы деревьев 104 может быть использована измерительная система 122 для выполнения измерений в отношении дерева. В этом описанном примере измерительная система 122 содержит беспилотные воздушные транспортные средства 102 и измерительное управляющее устройство 124.
Как показано, беспилотные воздушные транспортные средства 102 выполнены с возможностью полета через группу деревьев 104 с выработкой информации по меньшей мере об одном дереве из группы деревьев 104. Используемый здесь термин «группа» применительно к объектам означает один объект или более. Например, группа деревьев 104 означает одно дерево или более.
В этом примере беспилотные воздушные транспортные средства 102 включают беспилотное воздушное транспортное средство 106 и беспилотное воздушное транспортное средство 108. В этом конкретном примере беспилотные воздушные транспортные средства 102 выполнены с возможностью выполнения измерений в отношении дерева. Иными словами, беспилотные воздушные транспортные средства 102 могут быть выполнены с возможностью выполнения измерений в отношении группы деревьев 104 при полете через эту группу деревьев 104 под ее пологом.
В этих иллюстративных примерах беспилотное воздушное транспортное средство 106 содержит датчиковую систему 114, а беспилотное воздушное транспортное средство 108 содержит датчиковую систему 116.
Как показано, датчиковая система 114 выполнена с возможностью сканирования деревьев 110 лазерным лучом 118. Она регистрирует отклики на качание лазерного луча 118. Кроме того, датчиковая система 114 также выполнена с возможностью выработки изображений. В одном из иллюстративных примеров регистрируемые отклики на лазерный луч 118 и указанные изображения могут быть использованы для выработки показаний, относящихся к диаметрам деревьев 110. Далее, также могут быть выработаны другие показания, например показания, относящиеся к сбегу дерева, с использованием по меньшей мере одного элемента группы, включающей указанные изображения и зарегистрированные отклики на лазерный луч 118.
Аналогично датчиковая система 116 выполнена с возможностью выработки информации о деревьях 110 из группы деревьев 104 посредством лазерного луча 120, который может сканировать деревья 110, когда беспилотное воздушное транспортное средство 108 летит через деревья 110 из группы деревьев 104. Датчиковая система 116 может регистрировать отклики на лазерный луч 120. Кроме того, датчиковая система 116 также выполнена с возможностью выработки изображений деревьев 110. Отклики на лазерный луч 120 и указанные изображения могут быть использованы для выработки показаний, относящихся к диаметрам деревьев 110.
Далее, датчиковая система 114 беспилотного воздушного транспортного средства 106 и датчиковая система 116 беспилотного воздушного транспортного средства 108 могут быть использованы для выработки информации для избегания препятствий при полете через группу деревьев 104. В частности, препятствия могут включать группу деревьев 104, а также, возможно, препятствия других типов. Другие препятствия могут включать, например, здания, осветительные мачты, лесозаготовительное оборудование и препятствия других типов. По меньшей мере один элемент группы, включающей изображения и отклики на лазерные лучи, может быть использован для направления беспилотных воздушных транспортных средств 102 через группу деревьев 104 по траекториям, избегающим препятствия.
В этих иллюстративных примерах вырабатываемая информация может быть обработана беспилотными воздушными транспортными средствами 102 с выработкой информации о диаметре, относящейся к группе деревьев 104. Затем эта информация может быть направлена на измерительное управляющее устройство 124, расположенное в управляющей станции 126. В этом иллюстративном примере информация о диаметре может быть направлена беспилотным воздушным транспортным средством 106 по беспроводной линии 128 связи и беспилотным воздушным транспортным средством 108 по беспроводной линии 130 связи на управляющую станцию 126.
В некоторых иллюстративных примерах информацией о диаметре, направляемой на измерительное управляющее устройство 124 управляющей станции 126, могут быть указанные отклики и изображения. Измерительное управляющее устройство 124 может затем использовать эту информацию о диаметре для выработки некоторого количества диаметров группы деревьев 104.
Далее, датчиковая система 114 беспилотного воздушного транспортного средства 106 и датчиковая система 116 беспилотного воздушного транспортного средства 108 могут быть использованы для выработки информации других типов в дополнение к информации о диаметре, относящейся к группе деревьев 104, или вместо нее. Эта информация может быть в общем названа информацией об измерениях в отношении деревьев.
На фиг.2 проиллюстрирована функциональная схема измерительной среды для выполнения измерений в отношении дерева в соответствии с одним из иллюстративных вариантов реализации. В этом иллюстративном примере измерительная среда 100, показанная на фиг.1, является примером одной из реализации измерительной среды 200 для выполнения измерений в отношении дерева, показанной на фиг.2. В этом иллюстративном примере измерительная система 202 для выполнения измерений в отношении дерева использована для выработки информации 204 об измерениях в отношении дерева, относящейся к группе деревьев 206.
В этих иллюстративных примерах группа деревьев 206 может быть различных видов. Например, группа деревьев 206 может быть группой деревьев, расположенных в месте, например в естественном лесу, в искусственно восстановленном лесу, на лесной ферме, в яблочном саду, на сосновой плантации, в парке, на горе или в другом подходящем месте, в котором имеется одно дерево или более.
Группа деревьев 206 может быть расположена в любом месте, в котором между деревьями из группы деревьев 206 имеются промежутки, так что одно беспилотное воздушное транспортное средство или более из флота 218 беспилотных воздушных транспортных средств может маневрировать при полете через группу деревьев 206. Промежутки могут иметь рисунок. Рисунок может быть в виде деревьев, расположенных рядами и столбцами. Промежутки могут иметь другие повторяющиеся рисунки, не основанные на рядах деревьев. В других иллюстративных примерах промежутки могут быть случайными или неповторяющимися.
В этих иллюстративных примерах информацию 204 вырабатывают в отношении группы деревьев 206. Информация 204 может быть использована для анализа группы деревьев 206, который может быть использован для выполнения различных действий над группой деревьев 206. Например, на основании анализа информации 204 могут быть выполнены подрезание, заготовка деревьев, посадка деревьев, уничтожение вредителей и другие подходящие действия.
В этих иллюстративных примерах измерительная система 202 содержит измерительное управляющее устройство 216 и флот 218 беспилотных воздушных транспортных средств. Измерительное управляющее устройство 216 выполнено с возможностью выполнения по меньшей мере одной операции из группы, включающей управление работой флота 218 беспилотных воздушных транспортных средств, обработку информации 204 и другие подходящие операции.
Как показано, измерительное управляющее устройство 216 может быть реализовано с использованием аппаратных средств, программных средств или их комбинации. В иллюстративных примерах аппаратные средства могут быть системой, содержащей электронную схему, интегральной схемой, специализированной интегральной схемой (ASIC), программируемым логическим устройством или аппаратными средствами другого подходящего типа, выполненными с возможностью выполнения некоторого количества операций. В случае программируемого логического устройства оно выполнено с возможностью выполнения указанного некоторого количества операций. Это устройство может быть переналажено позднее или может быть выполнено с постоянной возможностью выполнения указанного некоторого количества операций. Примеры программируемых логических устройств включают, например, программируемую логическую матрицу, программируемую матричную логическую схему, программируемую пользователем логическую матрицу, программируемую пользователем вентильную матрицу и другие подходящие аппаратные средства. Кроме того, процессы могут быть реализованы на органических компонентах, интегрированных с неорганическими компонентами, и/или быть осуществлены полностью на органических компонентах, исключая человека. Например, процессы могут быть реализованы в виде электронных схем на органических полупроводниках.
В этом иллюстративном примере измерительное управляющее устройство 216 может быть реализовано в компьютерной системе 220, которая содержит один компьютер или более. При наличии в ней более одного компьютера, эти компьютеры могут быть связаны друг с другом посредством среды для обеспечения связи, например сети.
В этих иллюстративных примерах измерительное управляющее устройство в компьютерной системе 220 может быть расположено в одном месте, например в управляющей станции 222. Управляющая станция 222 может быть расположена в здании на земле, на летательном аппарате, корабле, наземном транспортном средстве или в другом подходящем месте.
В этих иллюстративных примерах измерительное управляющее устройство 216 может управлять флотом 218 беспилотных воздушных транспортных средств для обеспечения его движения через группу деревьев 206. Этим движением можно управлять с выработкой информации 204, относящейся к некоторым или всем деревьям из группы деревьев 206. Например, измерительное управляющее устройство может вырабатывать некоторое количество маршрутов 238 для использования флотом 218 беспилотных воздушных транспортных средств при полете через группу деревьев 206.
Кроме того, измерительное управляющее устройство 216 также может принимать информацию 204 и обрабатывать ее. В этих иллюстративных примерах обработка информации 204 может быть использована для выработки отчета 240, который может включать информацию о диаметрах, сбеге, плотности деревьев, типе деревьев, промежутках между деревьями и другую подходящую информацию, относящуюся к группе деревьев 206. Отчет 240 может быть различных видов. Например, отчет 240 может включать графики, рисунки, текст, изображения и информацию других подходящих типов.
Кроме того, отчет 240 также может включать рекомендации. Эти рекомендации могут включать рекомендации относительно того, необходима ли дополнительная посадка деревьев, следует ли проредить деревья, следует ли заготавливать деревья, и рекомендации других подходящих типов.
Как показано, измерительное управляющее устройство 216 обладает уровнем интеллекта 226. В некоторых иллюстративных примерах уровень интеллекта 226 может быть таким, что входная информация от оператора может быть не нужна. Например, требуемый уровень интеллекта 226 измерительного управляющего устройства 216 может обеспечивать система искусственного интеллекта и процессоры других подходящих типов. В частности, система искусственного интеллекта может включать экспертную систему, нейронную сеть, простую эвристику, нечеткую логику, байесовские сети или системы других подходящих типов, обеспечивающих требуемый уровень интеллекта 226 измерительного управляющего устройства 216.
В этом иллюстративном примере флот 218 беспилотных воздушных транспортных средств включает некоторое количество беспилотных воздушных транспортных средств 224. Используемая здесь фраза «некоторое количество» применительно к объектам означает один объект или более. Например, некоторое количество беспилотных воздушных транспортных средств 224 означает одно беспилотное воздушное транспортное средство или более.
Как показано, некоторое количество беспилотных воздушных транспортных средств 224 может быть группой автономных беспилотных воздушных транспортных средств 228 или может включать эту группу. В этом иллюстративном примере группа автономных беспилотных воздушных транспортных средств 228 может быть выполнена с возможностью работы в качестве роя 230 или группы роев 232 в этих иллюстративных примерах.
В других иллюстративных примерах измерительное управляющее устройство 216 может быть распределено в различных местах. Например, оно может быть распределено в одном или более из некоторого количества беспилотных воздушных транспортных средств 224 флота 218 беспилотных воздушных транспортных средств. В других иллюстративных примерах измерительное управляющее устройство 216 может быть распределено в некотором количестве беспилотных воздушных транспортных средств 224 и управляющей станции 222 в зависимости от конкретной реализации. В некоторых иллюстративных примерах измерительное управляющее устройство 216 может быть компьютерной программой, принимающей входную информацию от оператора и выдающее выходную информацию оператору.
В этих иллюстративных примерах одно или более из некоторого количества беспилотных воздушных транспортных средств 224 флота 218 выполнены с возможностью выработки информации 204, которая может быть направлена на измерительное управляющее устройство 216 по линии 234 связи. В этих иллюстративных примерах информацию 204 направляют на измерительное управляющее устройство 216 по линии 7.34 связи. Если измерительное управляющее устройство 216 расположено в удаленном месте по отношению к флоту 218, например на управляющей станции 222, линия 234 связи может быть беспроводной. Информацию 204 могут направлять периодически или по существу в реальном времени по мере выработки информации 204 беспилотным воздушным транспортным средством 236 из числа беспилотных воздушных транспортных средств 224.
Еще в одном иллюстративном примере линия 234 связи может быть проводной линией связи, устанавливаемой, когда беспилотное воздушное транспортное средство 236 завершило выполнение измерений с выработкой информации 204. В этом случае беспилотное воздушное транспортное средство 236 может вернуться на управляющую станцию 222. Линия 234 связи может быть сетевым кабелем, беспроводной линией связи, кабелем, содержащим универсальную последовательную шину, оптическим кабелем или другим подходящим носителем для установления линии 234 связи. В этих иллюстративных примерах измерительное управляющее устройство 216 выполнено с возможностью приема информации 204 от одного или более беспилотного воздушного транспортного средства из числа беспилотных воздушных транспортных средств 224 флота 218. В этом иллюстративном примере измерительное управляющее устройство 216 может принимать информацию 204 от беспилотного воздушного транспортного средства 236.
На фиг.3 проиллюстрирована функциональная схема беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере беспилотное воздушное транспортное средство 300 является примером одной из реализации беспилотного воздушного транспортного средства из некоторого количества беспилотных воздушных транспортных средств 224 флота 218, представленного на фиг.2. Беспилотное воздушное транспортное средство 300 может быть использовано для реализации беспилотного воздушного транспортного средства 106 и беспилотного воздушного транспортного средства 108, представленных на фиг.1.
В этом иллюстративном примере беспилотное воздушное транспортное средство 300 включает некоторое количество различных компонентов. Например, оно включает планер 302, двигательную систему 304, датчиковую систему 306, систему 308 для обеспечения связи, управляющее устройство 310 и источник 312 энергии.
Планер 302 является конструкцией для физической поддержки других компонентов беспилотного воздушного транспортного средства 300. Планер 302 может быть фюзеляжем, крыльями, стабилизаторами и другими конструкциями, подходящими в качестве конструкций этого типа. Планер 302 также может включать управляющие поверхности, например элероны, рули направления, рули высоты или управляющие поверхности других типов.
Двигательная система 304 связана с планером 302 и выполнена с возможностью обеспечения движения беспилотного воздушного транспортного средства 300. Если один компонент «связан» с другим компонентом, в этих описанных примерах такая связь означает физическую связь.
Например, первый компонент, двигательную систему 304, можно считать связанным со вторым компонентом, планером 302, путем фиксации со вторым компонентом, сцепления со вторым компонентом, монтирования со вторым компонентом, сварки со вторым компонентом, прикрепления ко второму компоненту и/или соединения со вторым компонентом другим подходящим способом. Первый компонент также может быть соединен со вторым компонентом с использованием третьего компонента. Первый компонент также можно считать связанным со вторым компонентом путем его выполнения в качестве части или продолжения второго компонента.
Двигательная система 304 может быть различных видов. Например, она может включать по меньшей мере один элемент группы, включающей некоторое количество двигателей и некоторое количество винтов. Некоторое количество двигателей может быть электрическими двигателями, например бесщеточными двигателями. Некоторое количество двигателей может использовать основу топлива, например керосин. В других примерах двигательная система 304 может быть реактивным двигателем, турбореактивным двигателем или двигательной системой другого типа, подходящей для обеспечения движения беспилотного воздушного транспортного средства 300.
Датчиковая система 306 связана с планером 302 и выполнена с возможностью выработки информации об окружающей среде вокруг беспилотного воздушного транспортного средства 300. Датчиковая система 306 может включать датчики одного или более типа, выполненные с возможностью выработки информации об окружающей среде вокруг беспилотного воздушного транспортного средства 300. Например, датчиковая система 306 может вырабатывать по меньшей мере один элемент группы, включающей информацию 332 о препятствии и информацию 204, представленную на фиг.2. В этих иллюстративных примерах датчиковая система 306 может быть реализована с использованием датчиков различных типов. Например, она может быть реализована с использованием по меньшей мере одного элемента группы, включающей активную световую датчиковую систему, лидарную систему, съемочную систему, лазерный альтиметр, времяпролетную съемочную систему, камеру для получения изображения со всеми элементами в фокусе, стереографическую камеру и датчики других подходящих типов.
Информация 332 о препятствии может включать определение препятствий, расстояние до препятствий, место препятствий и информацию других подходящих типов. Препятствиями могут быть деревья, ветви деревьев, стены, вьющиеся растения, искусственные конструкции, транспортные средства и объекты других подходящих типов, которые могут быть потенциальной помехой движению беспилотного воздушного транспортного средства 300.
В этих иллюстративных примерах информация 334 об измерениях в отношении дерева является одним из примеров информации 204, представленной на фиг.2. В этом иллюстративном примере информация 204 включает по меньшей мере один элемент группы, включающей информацию 336 о диаметре, информацию 338 о сбеге и информацию других подходящих типов, относящуюся к группе деревьев 206 области 208.
В этих иллюстративных примерах информация 336 о диаметре включает измеренные диаметры группы деревьев 206. Информация 338 о сбеге указывает на сбег диаметра группы деревьев 206. В других иллюстративных примерах информация 204 может быть использована для указания на диаметр на высоте груди, количество стволов, наличие раздвоенных стволов, принадлежность корневой шейки, другие отклонения размеров дерева, классификацию гниения, другие повреждения, состояние почвы под деревом, повреждение пожаром или информацию других подходящих типов. Эта информация в некоторых иллюстративных примерах может быть информацией, влияющей на ценность группы деревьев 206. На основании информации этих типов может быть принято решение о том, являются ли размеры деревьев, здоровье деревьев или и размеры, и здоровье деревьев такими, что необходимо выполнить в отношении группы деревьев 206 области 208 другие операции. Разумеется, в результате измерений может быть получена информация других подходящих типов в зависимости от конкретной реализации.
В этих иллюстративных примерах датчиковая система 306 может включать некоторое количество датчиковых модулей 314. В этом примере датчиковый модуль из некоторого количества датчиковых модулей 314 является съемным. Иными словами, один датчиковый модуль может быть заменен другим датчиковым модулем из некоторого количества датчиковых модулей 314 датчиковой системы 306 беспилотного воздушного транспортного средства 300.
Таким образом может быть обеспечена конструктивная универсальность беспилотного воздушного транспортного средства 300. В частности, датчиковый модуль из некоторого количества датчиковых модулей 314 может быть выбран для использования в беспилотном воздушном транспортном средстве 300 в зависимости от назначенных ему задачи или задания. Кроме того, при использовании некоторого количества датчиков 314 вес беспилотного воздушного транспортного средства 300 может быть уменьшен путем уменьшения количества датчиков датчиковой системы 306 до количества, необходимого для выполнения конкретных задачи или задания.
Например, датчиковый модуль 316 может содержать некоторое количество датчиков 318. Набор из некоторого количества датчиков 318 может быть выбран для задачи или задания конкретного типа, которые необходимо выполнить.
Система 308 для обеспечения связи связана с планером 302. Как показано, система 308 для обеспечения связи выполнена с возможностью обеспечения связи между беспилотным воздушным транспортным средством 300 и другим устройством. Другим устройством может быть, например, измерительное управляющее устройство 216, 'некоторое количество беспилотных воздушных транспортных средств 224 флота 218, навигационное управляющее устройство и другие подходящие компоненты, изображенные на фиг.2. В этих иллюстративных примерах связь может быть беспроводной. В некоторых случаях может иметься также интерфейс проводной связи.
При наличии связи с навигационным управляющим устройством беспилотное воздушное транспортное средство 300 может использовать систему 308 для обеспечения связи для направления беспроводным способом информации на это навигационное управляющее устройство, которое обрабатывает исходную информацию и возвращает беспроводным способом обработанную информацию, относящуюся к месту и навигации, на беспилотное воздушное транспортное средство 300. Система 308 для обеспечения связи может быть выполнена с возможностью передачи информации с беспилотного воздушного транспортного средства 300 на другие устройства для внешней обработки. В этом случае вес беспилотного воздушного транспортного средства 300 может быть уменьшен путем уменьшения веса бортового обрабатывающего оборудования для обработки информации, уменьшения энергетических требований к обработке информации на борту с использованием этого обрабатывающего оборудования или комбинации вышеперечисленного.
Источник 312 энергии связан с планером 302 и выполнен с возможностью обеспечения энергией других компонентов беспилотного воздушного транспортного средства 300. Источник 312 энергии может быть различных видов. Например, он может включать по меньшей мере один элемент группы, включающей энергетическую систему 320 и систему 322 для сбора энергии.
В этом иллюстративном примере энергетическая система 320 может включать одну батарею или более. Эти батареи могут быть модульными и сменными. В других иллюстративных примерах энергетическая система 320 может быть по меньшей мере одним элементом группы, включающей топливный элемент, топливо в топливном баке и энергетические системы других подходящих типов.
Система 322 для сбора энергии выполнена с возможностью выработки энергии для компонентов беспилотного воздушного транспортного средства 300 из окружающей среды вокруг него. Например, система 322 для сбора энергии может включать по меньшей мере один элемент группы, включающей солнечный элемент, ветровой турбинный микрогенератор и системы для сбора энергии других подходящих типов, которые вырабатывают энергию из окружающей среды вокруг беспилотного воздушного транспортного средства 300.
В этом иллюстративном примере управляющее устройство 310 связано с планером 302. Как показано, оно может быть аппаратными средствами и может включать программные средства.
Управляющее устройство 310 выполнено с возможностью управления работой беспилотного воздушного транспортного средства 300. Управляющее устройство 310 может иметь уровень интеллекта 324, который может варьироваться в зависимости от конкретной реализации беспилотного воздушного транспортного средства 300. В некоторых иллюстративных примерах управляющее устройство 310 можно рассматривать как часть измерительного управляющего устройства 216, изображенного на фиг.2.
В некоторых случаях уровень интеллекта 324 может быть таким, что управляющее устройство 310 принимает конкретные команды, которые могут включать, например, помимо прочего направление движения, точку маршрута для выработки информации 204, представленной на фиг.2, с использованием датчиковой системы 306 и другие аналогичные команды.
В других иллюстративных примерах уровень интеллекта 324 может быть выше, так что беспилотное воздушное транспортное средство 300 может принимать задание. В этих иллюстративных примерах задание представляет собой выполняемую работу. Задание может быть частью задачи. В этих примерах задание может содержать операции, которые выполняют в рамках указанной работы. Например, заданием может быть отсканировать конкретное место в группе деревьев 206, представленных на фиг.2. Еще одним заданием может быть движение к этому конкретному месту в группе деревьев 206.
Управляющее устройство 310 может определять операции, необходимые для выполнения задания. Задание может быть постоянным заданием, согласно которому беспилотное воздушное транспортное средство 300 следует по маршруту в конкретной области с выработкой информации 204 с использованием датчиковой системы 306.
В других иллюстративных примерах уровень интеллекта 324 может быть еще выше, так что беспилотное воздушное транспортное средство 300 выполнено с возможностью связи с другими беспилотными воздушными транспортными средствами для координации выполнения одного задания или более. Например, управляющее устройство 310 может содержать электронную схему, компьютерную программу, систему искусственного интеллекта и осуществлять процессы других подходящих типов, которые могут обеспечивать требуемый уровень интеллекта 324.
В этих иллюстративных примерах уровень интеллекта 324 может обеспечивать интеллектуальная система 328, которая может использовать экспертную систему, нейронную сеть, нечеткую логику и системы других подходящих типов для обеспечения уровня интеллекта 324.
Уровень интеллекта 324 управляющего устройства 310 может обеспечивать реализацию различных функций, например динамическое планирование маршрута. Таким образом могут быть определены препятствия вдоль маршрута и, следовательно, их можно избежать. Такое определение и избежание препятствий может быть выполнено в режиме реального времени. Эти препятствия могут включать, например, помимо прочего склон горы, дерево и другие препятствия. Избежание препятствий может быть обеспечено с использованием информации 332 о препятствии, вырабатываемой датчиковой системой 306.
Управляющее устройство 310 также может осуществлять мониторинг состояния различных систем беспилотного воздушного транспортного средства 300. Например, управляющее устройство 33.0 может осуществлять мониторинг уровня энергии, имеющейся или остающейся в источнике 312 энергии. Если источник 312 энергии включает только батареи энергетической системы 320, управляющее устройство 310 может направлять беспилотное воздушное транспортное средство 300 с его возвратом на базу для перезарядки или замены батарей.
В этих иллюстративных примерах тип беспилотного воздушного транспортного средства, используемого в качестве беспилотного воздушного транспортного средства 300, может быть выбран на основании его полезной нагрузки, характеристик датчика, препятствий, имеющихся в группе деревьев 206, параметров полета, имеющихся ресурсов или комбинации вышеперечисленного. Алгоритм, относящийся к избеганию препятствий и навигации, может быть приспособлен для использования информации 332 о препятствии для избегания препятствий или для выбора типа беспилотного воздушного транспортного средства с необходимым уровнем характеристик в зависимости от типа деревьев в группе деревьев 206 и/или препятствий, имеющихся в группе деревьев 206.
Например, в случае естественного леса без систематических промежутков между деревьями может быть выбрано меньшее беспилотное воздушное транспортное средство. В других иллюстративных примерах, когда беспилотное воздушное транспортное средство 300 используют с роем 230 группы автономных беспилотных воздушных транспортных средств 228, уровень интеллекта 324 управляющего устройства 310 может быть таким, что оно направляет самое маленькое беспилотное воздушное транспортное средство роя 230 в область группы деревьев 206 с наименьшим промежутком между деревьями, а большие беспилотные воздушные транспортные средства роя 230 направляет в другие области группы деревьев 206. Таким образом беспилотные воздушные транспортные средства роя 230 различных размеров могут работать совместно для выработки информации о группе деревьев 206.
Беспилотное воздушное транспортное средство 300, проиллюстрированное на фиг.3, не следует рассматривать как накладывающее ограничения на способ, которым может быть реализовано беспилотное воздушное транспортное средство 300. В других иллюстративных примерах беспилотное воздушное транспортное средство 300 может включать другие компоненты в дополнение к описанным или вместе них.
На фиг.4 проиллюстрирована функциональная схема датчиков датчиковой системы беспилотного воздушного транспортного средства в соответствии с одним из иллюстративных вариантов реализации. На этом чертеже показаны примеры датчиков, которые могут быть реализованы в датчиковой системе 306 беспилотного воздушного транспортного средства 300. Как показано, датчиковая система 306 содержит съемочную систему 400 и активную световую датчиковую систему 402.
Как показано, съемочная система 400 содержит камеру 424 видимого диапазона. В некоторых иллюстративных примерах съемочная система 400 может быть других видов, выбранных из одного из элементов группы, включающей мультиспектральную камеру, гиперспектральную камеру, времяпролетную камеру или камеру другого подходящего типа. В других примерах съемочная система 400 может содержать набор камер.
В этом иллюстративном примере съемочная система 400 выполнена с возможностью выработки некоторого количества изображений 406 с необходимым разрешением. Изображения 406 могут быть неподвижными изображениями, видеоизображениями, изображениями с информацией о глубине или изображениями другого подходящего типа. В этом иллюстративном примере изображения 406 могут быть использованы в качестве информации 332 о препятствии и информации 334 об измерениях в отношении дерева. Иными словами, изображения 406 могут быть использованы для выработки как информации для избегания препятствий, так и информации о деревьях.
В этом иллюстративном примере активная световая датчиковая система 402 представляет собой лидарную систему 416. В этом иллюстративном примере лидарная система 416 вырабатывает показания 418, относящиеся к расстоянию до различных точек на объектах. Эти точки могут быть точками на деревьях.
Лидарная система 416 испускает свет и принимает отклики на этот свет с выработкой показаний 418, относящихся к расстоянию. В частности, в этих иллюстративных примерах свет может представлять собой лазерный луч.
На основании показаний 418, относящихся к расстоянию, может быть выработано трехмерное место, относящееся к этим точкам, для использования в облаке точек или для других подходящих целей. В этом иллюстративном примере показания 418, относящиеся к расстоянию до различных точек, могут быть использованы с пикселями изображений 406 для определения диаметра или сбега деревьев из группы деревьев. Диаметр может быть вычислен с использованием нелинейной функции, преобразующей ширину пикселя в действительную ширину на основании расстояния. В другом случае диаметр деревьев может быть вычислен с использованием соотносительных таблиц, показывающих соотношение между пиксельной шириной и действительной шириной как функцию расстояния до объекта.
Таким образом, показания 418, относящиеся к расстоянию, также могут быть использованы как для информации 332 о препятствии, так и для информации 334 об измерениях в отношении дерева. На основании комбинации изображений 406 и показаний 418, относящихся к расстоянию, может быть выработана информация, например информация 336 о диаметре, для информации 334 об измерениях в отношении дерева. Для формирования информации 338 о сбеге в соответствии с фиг.3 может быть определено множество диаметров на различных уровнях.
Далее, на основании изображений 406 беспилотное воздушное транспортное средство 300 может лавировать между деревьями и избегать встречных деревьев и других препятствий. Кроме того, показания 418, относящиеся к расстоянию, при их соотнесении с изображениями 406 также могут обеспечивать возможность определения того, пройдет ли беспилотное воздушное транспортное средство 300 между препятствиями, например деревьями.
В этих иллюстративных примерах лидарная система 416 может быть одноплоскостной лидарной системой 430. Иными словами, лазерный или другой свет можно качать только в одной плоскости, заданной двумя осями, а не во множестве плоскостей, заданных тремя осями. В этих иллюстративных примерах измерения на различных уровнях можно выполнять путем регулировки высоты беспилотного воздушного транспортного средства 300.
В случае лидарной системы такого типа вес датчиковой системы 306 может быть уменьшен благодаря уменьшенной сложности лидарных систем этого типа. Кроме того, в этих иллюстративных примерах одноплоскостная лидарная система 430 также может быть низкочастотной лидарной системой, которая может сканировать с частотой примерно от 10 Гц до 40 Гц. Низкочастотная лидарная система может быть использована для уменьшения веса и потребления меньшей энергии, чем большие лидарные системы. В результате в качестве беспилотного воздушного транспортного средства 300 может быть использовано меньшее беспилотное воздушное транспортное средство, и, таким образом, оно может легче лавировать через группу деревьев в этих иллюстративных примерах.
Еще в одном иллюстративном примере одноплоскостная лидарная система 430 может быть высокочастотной лидарной системой, которая может быть использована, когда беспилотное воздушное транспортное средство 300 является более тяжелым летательным аппаратом. В этих иллюстративных примерах высокочастотная лидарная система может иметь скорость сканирования примерно от 40 Гц до 100 кГц. При использовании высокочастотной лидарной системы для работы такой системы на беспилотном воздушном транспортном средстве 300 требуется больше энергии.
Еще в одном иллюстративном примере съемочная система 400 содержит стереографическую камеру 426. В реализации такого типа активная световая датчиковая система 402 может быть исключена из датчиковой системы 306. Изображения 406, вырабатываемые стереографической камерой 426, в этих иллюстративных примерах могут быть использованы как для информации 332 о препятствии, так и для информации 334 об измерениях в отношении дерева.
Стереографическая камера 426 выполнена с возможностью выработки изображений, которые могут быть использованы для формирования трехмерных изображений и для определения глубины и мест точек на изображении. Иными словами, стереографическая камера 426 может вырабатывать изображения 406 способом, обеспечивающим определение информации 334 об измерениях в отношении дерева без использования активной световой датчиковой системы 402. В других иллюстративных примерах датчиковая система 306 может включать лазерный альтиметр или другие подходящие компоненты в зависимости от конкретной реализации.
В других иллюстративных примерах съемочная система 400 может быть времяпролетной съемочной системой. В этом случае она может захватывать информацию о глубине изображения 406, относящуюся ко всей сцене, с каждым лазерным или световым импульсом в отличие от поточечного сканирования лазерным лучом, используемого в лидарной системе. В других иллюстративных примерах съемочная система 400 может быть камерой для получения изображения со всеми элементами в фокусе или системами для формирования изображения других подходящих типов, имеющих требуемый вес и дающих необходимый уровень детализации изображений 406.
В этих иллюстративных примерах приемник 420 глобальной системы местоопределения является примером еще одного датчика, который при необходимости может быть включен в датчиковую систему 306. Приемник 420 глобальной системы местоопределения вырабатывает информацию 432 о месте, определяющую место беспилотного воздушного транспортного средства 300 в трехмерных координатах. Например, приемник 420 глобальной системы местоопределения может вырабатывать такую информацию, как широта, долгота и высота беспилотного воздушного транспортного средства 300.
В некоторых иллюстративных примерах приемник 420 глобальной системы местоопределения может быть исключен или может не функционировать, как необходимо, под пологом группы деревьев. В этом случае полог ослабляет или подавляет сигнал глобальной системы местоопределения. В результате беспилотным воздушным транспортным средством 300 может быть использован процесс, называемый одновременное определение места и построение карты.
При одновременном определении места и построении карты информацию о положении от приемника глобальной системы местоопределения сочетают с информацией о месте от системы для одновременного определения места и построения карты. Эта система для одновременного определения места и построения карты может сочетать датчиковую информацию от камеры 424 видимого диапазона, стереографической камеры 426, лидарной системы 416 и/или другую датчиксзую информацию от других датчиков беспилотного воздушного транспортного средства 300 для подтверждения оценки положения или уточнения информации глобальной системы местоопределения.
В этих иллюстративных примерах датчики акустической датчиковой системы 421 могут иметь различную ориентацию в беспилотном воздушном транспортном средстве 300. Как показано, акустическая датчиковая система 421 может быть реализована с использованием ультразвуковой датчиковой системы 422. Разумеется, могут быть использованы звуковые системы любого другого типа. Ультразвуковая датчиковая система 422 может обеспечивать информацию о высоте, относящуюся к высоте беспилотного воздушного транспортного средства 300. Кроме того, ультразвуковая датчиковая система 422 также может вырабатывать информацию 434 о расстоянии, которая определяет расстояние от беспилотного воздушного транспортного средства 300 до деревьев и других препятствий для целей маневрирования беспилотного воздушного транспортного средства 300.
Хотя были описаны конкретные примеры, датчиковая система 306 может включать любую комбинацию этих датчиков для выработки информации 334 об измерениях в отношении дерева и информации 332 о препятствии.
Примеры комбинаций датчиков, которые могут быть использованы в датчиковой системе 306, включают камеру 424 видимого диапазона и лидарную систему 416. Еще в одном иллюстративном примере лидарная система 416 может быть использована сама по себе. Еще в одном примере датчиковая система 306 может включать только стереографическую камеру 426. Разумеется, эти комбинации являются только примерами, и другие реализации могут включать другие комбинации датчиков, проиллюстрированных применительно к датчиковой системе 306 на фиг.4, а также датчики других подходящих типов, которые могут быть подходящими для выработки по меньшей мере одного элемента группы, включающей информацию 334 об измерениях в отношении дерева и информацию 332 о препятствии. Например, хотя иллюстративные варианты реализации показаны как с лидарной системой 416, так и с ультразвуковой датчиковой системой 422 в составе датчиковой системы 306, в этих иллюстративных примерах для выработки информации 334 об измерениях в отношении дерева и информации 332 о препятствии может быть необходима только лидарная система 416 или только ультразвуковая датчиковая система 422.
Измерительную среду 200 и различные компоненты измерительной системы 202, показанные на фиг.2-4, не следует рассматривать как накладывающие физические или архитектурные ограничения на способ, которым может быть реализован иллюстративный вариант реализации. В дополнение к проиллюстрированным компонентам или вместо них могут быть использованы другие компоненты. Некоторые компоненты могут не требоваться. Кроме того, представленные схемные блоки иллюстрируют некоторые функциональные компоненты. Один из этих схемных блоков или более может быть объединен, разделен или объединен и разделен на различные схемные блоки при его реализации в одном из иллюстративных вариантов реализации.
Например, в некоторых иллюстративных примерах для выработки информации 204 могут быть использованы беспилотные воздушные транспортные средства различных типов. Например, флотом 218 могут быть использованы как беспилотное воздушное транспортное средство с неподвижным крылом, так и беспилотный винтокрылый летательный „ аппарат для выработки информации 204, относящейся к группе деревьев 206. В других иллюстративных примерах информация 204 также может включать информацию других типов, например тип деревьев, высота деревьев и информация других подходящих типов о группе деревьев 206.
В некоторых иллюстративных примерах измерительное управляющее устройство 216 может не быть использовано для выработки некоторого количества маршрутов 238. Вместо этого направление беспилотного воздушного транспортного средства 236 между деревьями может задавать оператор. Беспилотное воздушное транспортное средство 236 может тогда двигаться в этом направлении с выработкой показаний, при этом избегая препятствий.
На фиг.5 проиллюстрированы различные размеры беспилотных воздушных транспортных средств в соответствии с одним из иллюстративных вариантов реализации. В этом иллюстративном примере группа деревьев 500 является еще одним примером реализации группы деревьев 206, показанных в виде схемного блока на фиг.2.
Группа деревьев 500 имеет ряд 502 и ряд 504. Такое расположение группы деревьев может быть найдено в окружающей среде, например на лесной ферме. Конкретнее, ряд 502 и ряд 504 могут быть частью сосновой плантации в этих иллюстративных примерах.
Как показано, винтокрылый летательный аппарат 506, винтокрылый летательный аппарат 508 и винтокрылый летательный аппарат 510 расположены между рядом 502 и рядом 504 группы деревьев 500. Эти винтокрылые летательные аппараты изображены в масштабе в этих иллюстративных примерах.
Винтокрылый летательный аппарат 506, винтокрылый летательный аппарат 508 и винтокрылый летательный аппарат 510 являются примерами реализации беспилотного воздушного транспортного средства 300, представленного на фиг.3, и реализации беспилотного воздушного транспортного средства флота 218, представленного на фиг.2. В частности, винтокрылый летательный аппарат 506, винтокрылый летательный аппарат 508 и винтокрылый летательный аппарат 510 являются примерами различных размеров, которые могут быть выбраны для беспилотного воздушного транспортного средства 300.
Винтокрылый летательный аппарат 506, винтокрылый летательный аппарат 508 и винтокрылый летательный аппарат 510 могут быть различных размеров в этих иллюстративных примерах. Тип винтокрылого летательного аппарата, используемого в качестве беспилотного воздушного транспортного средства 300, может зависеть от параметров группы деревьев 500 в ряду 502 и ряду 504. Например, если деревья в ряду 502 и ряду 504 группы деревьев 500 подрезаны, может быть использован больший винтокрылый летательный аппарат. В другом иллюстративном примере, если деревья в ряду 502 и ряду 504 группы деревьев 500 не подрезаны, может быть использован меньший винтокрылый летательный аппарат.
В этих иллюстративных примерах размер винтокрылого летательного аппарата, используемого в качестве беспилотного воздушного транспортного средства 300, также может зависеть от других параметров, отличных от того, подрезаны ли деревья в группе деревьев 500 или нет. Например, выбор беспилотного воздушного транспортного средства 300 может зависеть от величины полезной нагрузки, расстояния между рядами деревьев, требуемого времени полета, требуемой дальности полета или другого подходящего параметра.
В этих иллюстративных примерах ряд 502 и ряд 504 группы деревьев 500 могут быть посажены на расстоянии 509 друг от друга. Расстояние 509 может быть около девяти футов в этих иллюстративных примерах. Разумеется, ряд 502 и ряд 504 группы деревьев 500 могут быть посажены на расстоянии восьми, десяти, пятнадцати футов друг от друга или на другом подходящем расстоянии друг от друга в зависимости от конкретной реализации.
Винтокрылый летательный аппарат, выбираемый в качестве беспилотного воздушного транспортного средства 300, выбирают таким, что он может лавировать через препятствия, например ветви группы деревьев 500, на девяти футах между рядом 502 и рядом 504 в этом примере.
Как показано, винтокрылый летательный аппарат 506 больше, чем винтокрылый летательный аппарат 508 и винтокрылый летательный аппарат 510. Винтокрылый летательный аппарат 506 может иметь ширину 511, которая может составлять примерно 5,7 футов в этом примере. Ширина 511 представляет собой ширину транспортного средства, измеренную между полностью развернутыми винтами винтокрылого летательного аппарата 506. Винтокрылый летательный аппарат 506 может иметь среднюю полезную нагрузку примерно до 800 г.Винтокрылый летательный аппарат 506 может характеризоваться продолжительностью полета примерно 88 минут или дальностью полета примерно 49 миль в этих иллюстративных примерах.
Винтокрылый летательный аппарат 508 больше, чем винтокрылый летательный аппарат 510. В этом иллюстративном примере винтокрылый летательный аппарат 508 может иметь ширину 515 и среднюю полезную нагрузку примерно от 1000 г до примерно 2000 г. Ширина 515 может быть примерно 3,7 фута в этом примере. Ширина 515 представляет собой ширину транспортного средства, измеренную между полностью развернутыми винтами винтокрылого летательного аппарата 508. Винтокрылый летательный аппарат 508 может характеризоваться продолжительностью полета примерно от 17 минут до примерно 25 минут или дальностью полета примерно от 9 миль до примерно 15 миль в этих иллюстративных примерах.
Как показано, винтокрылый летательный аппарат 510 является наименьшим из изображенных в этом иллюстративном примере. Винтокрылый летательный аппарат 510 может иметь имеет ширину 517 и полезную нагрузку примерно 200-300 г. Ширина 517 может быть примерно 2,6 фута в этом примере. Ширина 517 представляет собой ширину транспортного средства, измеренную между полностью развернутыми винтами винтокрылого летательного аппарата 510. Винтокрылый летательный аппарат 510 может характеризоваться продолжительностью полета примерно от 25 минут до примерно 30 минут или дальностью полета примерно от 9 миль до примерно 14 миль в этих иллюстративных примерах.
Ряд 502 группы деревьев 500 может иметь ветви 513, проходящие до линии 505. Линия 505 может быть на расстоянии 518 от ряда 502. Расстояние 518 может быть примерно два фута в этих иллюстративных примерах. Аналогично ряд 504 может иметь ветви 512, проходящие до линии 507. Линия 507 может быть на расстоянии 514 от ряда 504. Расстояние 514 также может быть примерно два фута в этих иллюстративных примерах.
Необходимая работа беспилотного воздушного транспортного средства 300 может требовать зазора между ним и ветвями 513. Этот зазор может быть расстоянием 520 от конца ветвей 513. Расстояние 520 может быть примерно один фут в этих иллюстративных примерах. Аналогично необходимая работа беспилотного воздушного транспортного средства 300 может требовать зазора между ним и ветвями 512. Этот зазор может быть расстоянием 516.
В одном из иллюстративных примеров расстояние 516 также может быть примерно один фут в этих иллюстративных примерах. Разумеется, расстояние 516 и расстояние 520 могут быть меньше или больше в зависимости от конкретной реализации.
В этом конкретном примере при наличии ветвей 513, ветвей 512 и зазоров между ветвями 513, ветвями 512 и беспилотным воздушным транспортным средством 300 требуемым маршрутом беспилотного воздушного транспортного средства 300 может быть маршрут 522. Этот маршрут может иметь ширину 524. В одном из иллюстративных примеров ширина 524 может быть примерно три фута в этих иллюстративных примерах. Разумеется, в зависимости от требуемых параметров, наличия ветвей 513 и ветвей 512, маршрут 522 может быть меньше или больше в некоторых иллюстративных примерах.
Кроме того, в других иллюстративных примерах группа деревьев 500 может не иметь равноотстоящих деревьев или рядов. В этом случае винтокрылый летательный аппарат 506 может лететь динамическим маршрутом и пытаться поддерживать минимальное расстояние от деревьев и ветвей деревьев.
Как показано, при ширине маршрута 522 в три фута винтокрылый летательный аппарат 506 и винтокрылый летательный аппарат 508 могут быть слишком большими, чтобы работать, как необходимо, при полете между рядом 502 и рядом 504 группы деревьев 500. В этом примере размер винтокрылого летательного аппарата 510 может быть требуемым размером беспилотного воздушного транспортного средства 300.
В других иллюстративных примерах ветви 513 и ветви 512 могут отсутствовать. В этом случае для лавирования в группе деревьев 500 могут быть использованы винтокрылые летательные аппараты других размеров в зависимости от включенной функциональности.
В других иллюстративных примерах необходимая величина расстояния 520 и расстояния 516, определяющих зазоры до ветвей 513 и ветвей 512 соответственно, может быть менее одного фута. В этом случае в качестве беспилотного воздушного транспортного средства 300 может потребоваться винтокрылый летательный аппарат 508.
На фиг.6 проиллюстрировано беспилотное воздушное транспортное средство, вырабатывающее информацию об измерениях в отношении дерева в соответствии с одним из иллюстративных вариантов реализации. В этом показанном примере винтокрылый летательный аппарат 600 является одним из примеров беспилотного воздушного транспортного средства, которое может быть использовано для выполнения измерений в отношении группы деревьев 602, которая является одним из примеров способа, которым может быть расположена группа деревьев 206, представленных на фиг.2.
Винтокрылый летательный аппарат 600 является примером одной из реализации беспилотного воздушного транспортного средства 300 и является одной из реализации беспилотного воздушного транспортного средства флота 218. В этом примере винтокрылый летательный аппарат 600 представляет собой квадролет. В этом иллюстративном примере группа деревьев 602 является еще одним примером реализации группы деревьев 206, показанных в виде схемного блока на фиг.2.
Как показано, группа деревьев 602 расположена рядами 604 и столбцами 606. Такое расположение группы деревьев 602 можно найти в окружающей среде, например на лесной ферме, например на сосновой плантации.
В этом иллюстративном примере винтокрылый летательный аппарат 600 выполнен с возможностью полета между столбцами 606 и с возможностью выработки показаний, относящихся к деревьям. Как показано, винтокрылый летательный аппарат 600 выполнен с возможностью выработки информации о деревьях, относящейся к двум столбцам деревьев, при полете между этими столбцами. В этом примере винтокрылый летательный аппарат 600 летит между столбцом 608 и столбцом 610 группы деревьев 602. Винтокрылый летательный аппарат 600 выполнен с возможностью выработки информации об измерениях в отношении дерева при полете между этими двумя столбцами.
В этом иллюстративном примере винтокрылый летательный аппарат 600 выполнен с возможностью следования маршрутом 612 через группу деревьев 602 для выполнения измерений в отношении группы деревьев 602. Маршрут 612 может быть выработан измерительным управляющим устройством 216, представленным на фиг.2.
В этом иллюстративном примере винтокрылый летательный аппарат 600 может грубо следовать маршрутом 612. Иными словами, винтокрылый летательный аппарат 600 может регулировать свою траекторию, отклоняясь от маршрута 612. Эти отклонения могут быть выполнены по различным причинам.
Например, отклонения от маршрута 612 могут быть выполнены, чтобы избежать препятствий. В других иллюстративных примерах отклонения от маршрута 612 могут быть выполнены, чтобы сохранить центральное расположение винтокрылого летательного аппарата 600 между столбцами деревьев, например столбцом 608 и столбцом 610. Например, деревья в столбце 608 могут не отстоять на одинаковом расстоянии от деревьев в столбце 610 на протяжении этих двух столбцов. В результате винтокрылый летательный аппарат 600 может регулировать свою траекторию, при этом по существу продолжая лететь по маршруту 612.
Маршрут винтокрылого летательного аппарата 600 через группу деревьев 602, проиллюстрированный на фиг.6, не следует рассматривать как накладывающий ограничения на способ, которым могут быть реализованы различные иллюстративные варианты реализации. Например, группа деревьев 602 может не быть расположена рядами и столбцами, как показано на фиг.6. Вместо этого может быть более случайное распределение, например как в группе деревьев 104, показанной в среде 100, представленной на фиг.1.
В других иллюстративных примерах один дополнительный винтокрылый летательный аппарат или более может быть использован в дополнение к винтокрылому летательному аппарату 600 для выработки информации об измерениях в отношении дерева, относящейся к группе деревьев 602.
На фиг.7 проиллюстрирован винтокрылый летательный аппарат, выполняющий измерения в соответствии с одним из иллюстративных вариантов реализации. Винтокрылый летательный аппарат 700 является одним из примеров реализации беспилотного воздушного транспортного средства 300, представленного на фиг.3, и беспилотного воздушного транспортного средства из числа беспилотных воздушных транспортных средств 224, представленных на фиг.2.
В этом показанном примере винтокрылый летательный аппарат 700 движется через группу деревьев 702 по траектории 703. В частности, винтокрылый летательный аппарат 700 летит между столбцом 704 и столбцом 706 группы деревьев 702.
В этом иллюстративном примере винтокрылый летательный аппарат 700 содержит лидарную систему 708, которая может качать лазерный луч 709 с выработкой показаний, относящихся к расстоянию от винтокрылого летательного аппарата 700 до деревьев в столбце 704 и в столбце 706 группы деревьев 702.
Кроме того, в некоторых иллюстративных примерах винтокрылый летательный аппарат 700 может также содержать камеру 710, которая может быть камерой видимого диапазона, вырабатывающей изображения группы деревьев 702.
Таким образом, изображения деревьев могут быть обработаны для определения кромок деревьев. Кромки деревьев, определенные на изображении, могут включать, например, кромку 712 и кромку 714 дерева 717, кромку 718 и кромку 720 дерева 722 и кромку 724 и кромку 727 дерева 728.
В этих иллюстративных примерах расстояние между двумя кромками может быть определено путем вычисления количества пикселей между ними на изображении. Величина, определяющая вычисленное количество пикселей между кромками на изображении, может быть пиксельной шириной. Пиксельная ширина между двумя кромками объекта на изображении может быть преобразована в действительную ширину, что дает информацию о расстоянии до объекта от камеры, снявшей изображение, в момент, когда камера сняла изображение. В этих иллюстративных примерах действительная ширина представляет собой реальную ширину дерева из группы деревьев 702.
Измерения расстояния до деревьев, выполненные лидарной системой, используют для перехода от пиксельной ширины между кромками на изображении к действительной ширине дерева из группы деревьев 702. Для выполнения этого преобразования между пиксельной шириной и действительной шириной камера 710 калибрована с использованием известной калибровочной матрицы. Таким образом могут быть определены диаметры дерева 717, дерева 722 и дерева 728. Далее, могут быть определены диаметры этих деревьев на различных высотах на основании изображения и точек. С использованием измерений диаметра, выполненных на различных высотах, может быть определен сбег деревьев.
Далее при движении винтокрылого летательного аппарата 700 через группу деревьев 702 он может снять множество изображений данного дерева с различных ракурсов. Путем применения той же техники определения кромки, измерения расстояния и преобразования толщины, различные оценки диаметра и сбега могут быть уточнены. Например, для уточнения показаний, относящихся к диаметру, показания, полученные по разным изображениям, усредняют. Таким образом, показания, относящиеся к диаметру и сбегу, могут иметь необходимый уровень точности. В частности, этот необходимый уровень точности может быть по существу таким же, что и уровень точности, обеспечиваемый намного большими и более тяжелыми высокочастотными сканирующими лидарами, которые являются слишком тяжелыми для установки на малое беспилотное воздушное транспортное средство, например на винтокрылый летательный аппарат 700.
В других иллюстративных примерах винтокрылый летательный аппарат 700 может содержать только стереографическую камеру и может не нуждаться в лидарной системе. Стереографическая камера может вырабатывать информацию с различных ракурсов, что позволяет определять глубину и расстояние между различными точками на деревьях на основании изображений.
Проиллюстрированный на фиг.7 винтокрылый летательный аппарат 700, сканирующий группу деревьев 702, не следует рассматривать как накладывающий ограничения на способ, которым может быть выработана информация о группе деревьев 702. Например, в других иллюстративных примерах винтокрылый летательный аппарат 700 может делать более одного прохода между столбцом 704 и столбцом 706 группы деревьев 702. Множество проходом может быть сделано для выработки большего количества информации или более точной информации о деревьях из группы деревьев 702.
На фиг.8 проиллюстрировано беспилотное воздушное транспортное средство, летящее между рядами деревьев в соответствии с одним из иллюстративных вариантов реализации. В этом иллюстративном примере группа деревьев 800 является еще одним примером реализации группы деревьев 206, показанных в виде схемного блока на фиг.2.
Группа деревьев 800 содержит ряд 802 и ряд 804. Это расположение группы деревьев 800 может быть найдено в окружающей среде, например на лесной ферме. В частности, ряд 802 и ряд 804 могут быть частью сосновой плантации в этих иллюстративных примерах.
Деревья в ряду 802 и ряду 804 группы деревьев 800 могут быть не подрезаны. Ряд 802 может иметь ветви 806, а ряд 804 может иметь ветви 808. Ветви 806 и ветви 808 могут проходить примерно на два фута от ряда 802 и ряда 804 соответственно в этих иллюстративных примерах.
Как показано, винтокрылый летательный аппарат 510, представленный на фиг.5, расположен между рядом 802 и рядом 804 группы деревьев 800. Винтокрылый летательный аппарат 510 может лететь в направлении стрелки 812 между рядом 802 и рядом 804 с выполнением измерений в отношении группы деревьев 800. Это направление может быть одним из примеров маршрута, который в простом виде представляет собой вектор.
Винтокрылый летательный аппарат 510 может лететь между ветвями 806 и ветвями 808. В этом примере винтокрылый летательный аппарат 510 может следовать по маршруту, имеющим ширину 814, которая в этих иллюстративных примерах представляет собой расстояние между ветвями 806 и ветвями 808.
В других иллюстративных примерах деревья в ряду 802 и ряду 804 могут быть подрезаны. В этом случае винтокрылый летательный аппарат 510 может иметь больше пространства, чтобы лавировать вокруг препятствий в группе деревьев 800. Например, винтокрылый летательный аппарат 510 может следовать по маршруту с шириной 815, когда деревья в группе деревьев 800 подрезаны. В этом случае ширина 815 представляет собой расстояние между стволами деревьев в ряду 802 и стволами деревьев в ряду 804.
На фиг.9 проиллюстрировано беспилотное воздушное транспортное средство в соответствии с одним из иллюстративных вариантов реализации. В этом иллюстративном примере винтокрылый летательный аппарат 900 является примеров одной из реализации беспилотного воздушного транспортного средства 300, показанного в виде схемного блока на фиг.3. Кроме того, винтокрылый летательный аппарат 900 может быть одним из примеров винтокрылого летательного аппарата 510, представленного на фиг.5.
Как показано, винтокрылый летательный аппарат 900 может содержать планер 902, двигательную систему 904, датчиковую систему 906, систему 908 для обеспечения связи, управляющее устройство 910 и источник 912 энергии. Планер 902 обеспечивает конструкцию для физической оборы на нее других компонентов винтокрылого летательного аппарата 900.
Двигательная система 904 связана с планером 902 и выполнена с возможностью обеспечения движения винтокрылого летательного аппарата 900. В этом иллюстративном примере двигательная система 904 может быть винтами 914. Винты 914 могут быть около десяти дюймов в длину в этом примере. Разумеется, винты 914 могут быть длиннее или короче десяти дюймов в зависимости от конкретной реализации.
Как показано, двигательная система 904 с винтами 914 является двигателями 916. Двигатели 916 могут быть бесщеточными двигателями в этих иллюстративных примерах. В этом иллюстративном примере бесщеточные двигатели представляют собой синхронные двигатели, питаемые от источника постоянного тока.
В этих иллюстративных примерах датчиковая система 906 связана с планером 902 и выполнена с возможностью выработки информации об окружающей среде вокруг винтокрылого летательного аппарата 900.
Датчиковая система 906 может содержать датчики одного или более типа, выполненные с возможностью выработки информации об окружающей среде вокруг винтокрылого летательного аппарата 900. Например, датчиковая система 906 может вырабатывать информацию о препятствии, например информацию 332 о препятствии, представленную на фиг.3, и информацию об измерениях в отношении дерева, например информацию 204, представленную на фиг.2.
Как показано, датчиковая система 906 может содержать камеру 920 и камеру 922. Камера 920 может быть стереографической камерой, а камера 922 может быть камерой видимого диапазона в этих иллюстративных примерах. Камера 920 и камера 922 могут быть примерами реализации стереографической камеры 426 и камеры 424 видимого диапазона соответственно, представленных на фиг.4. Датчиковая система 906 в этом примере также включает активную световую датчиковую систему и при необходимости может включать приемник глобальной системы местоопределения (не показан).
Система 908 для обеспечения связи связана с планером 902. Как показано, она выполнена с возможностью обеспечения связи между винтокрылым летательным аппаратом 900 и другим устройством. Связь может быть беспроводной в этих иллюстративных примерах.
Управляющее устройство 910 связано с планером 902 и может управлять работой других компонентов винтокрылого летательного аппарата 900. Управляющее устройство 910 может иметь необходимый уровень интеллекта для управления работой винтокрылого летательного аппарата 900.
Управляющее устройство 910 может содержать процессорный блок и иметь функцию автопилота в этих иллюстративных примерах. Оно может принимать команды, задания или информацию других типов в зависимости от уровня его интеллекта. Кроме того, управляющее устройство 910 может управлять винтокрылым летательным аппаратом 900 с использованием навигационного программного обеспечения в некоторых иллюстративных примерах.
Источник 912 энергии связан с планером 902 и выполнен с возможностью обеспечения энергией других компонентов винтокрылого летательного аппарата 900. Источник 912 энергии может быть батареей 918, которая может быть выбрана из одного из элементов группы, включающей литиево-полимерную батарею, топливный элемент, литиево-воздушную батарею, воздушно-цинковую батарею или батарею другого подходящего типа.
Батарея 918 также может быть сменной для обеспечения непрерывного полета винтокрылого летательного аппарата 900. Если батарея 918 сменная, на ее место может быть установлена по меньшей мере одна другая батарея во время использования энергии винтокрылым летательным аппаратом 900.
Винтокрылый летательный аппарат 900 может двигаться по маршруту между группой деревьев для сбора информации об этой группе деревьев. Информация 204, представленная на фиг.2, может включать такую информацию, как тип деревьев, высота деревьев и информацию других подходящих типов.
Различные компоненты, представленные на фиг.1 и фиг.5-10, могут быть объединены с компонентами, представленными на фиг.2-4, использованы с ними или могут сочетаться с ними как комбинация вышеперечисленного. Кроме того, некоторые компоненты, представленные на фиг.1 и фиг.5-10, могут быть иллюстративными примерами того, как компоненты, показанные на фиг.2-4 в виде схемных блоков, могут быть реализованы в качестве физических устройств.
На фиг.10 проиллюстрирована блок-схема процесса выработки информации об измерениях в отношении дерева в соответствии с одним из иллюстративных вариантов реализации. Процесс, проиллюстрированный на фиг.10, может быть реализован с использованием измерительной системы 202, представленной на фиг.2.
Процесс начинается с движения беспилотного воздушного транспортного средства по маршруту через группу деревьев (операция 1000). Во время операции 1000 маршрут может иметь такую высоту, чтобы обеспечивать возможность выполнения измерений для определения некоторого количества диаметров группы деревьев посредством датчиковой системы, связанной с беспилотным воздушным транспортным средством.
В этих иллюстративных примерах маршрут может быть различных видов. Например, маршрут может иметь повороты и изменения с обеспечением движения беспилотного воздушного транспортного средства таким образом, что может быть выработана информация об измерениях в отношении дерева, относящаяся ко всем деревьям из группы деревьев. В некоторых иллюстративных примерах маршрут может быть просто траекторией в направлении между столбцами деревьев из группы деревьев.
Во время полета беспилотного воздушного транспортного средства по маршруту через группу деревьев вырабатывают информацию об измерениях в отношении дерева (операция 1002), после чего процесс завершается. В этом иллюстративном примере информация об измерениях может быть информацией, используемой для выработки показаний, относящихся к параметру, например диаметрам деревьев. В других иллюстративных примерах информация об измерениях в отношении дерева фактически может быть диаметрами деревьев.
На фиг.11 проиллюстрирована блок-схема процесса анализа изображений для определения диаметра в соответствии с одним из иллюстративных вариантов реализации. Процесс, проиллюстрированный на фиг.11, может быть реализован с использованием измерительной системы, представленной на фиг.2. Процесс, проиллюстрированный на фиг.11, также может быть реализован для определения сбега дерева и информации 204 других типов с использованием измерительной системы 202.
Процесс начинается с определения посредством съемочной системы препятствий на маршруте между деревьями из группы деревьев (операция 1100). Съемочная система может быть разрешающей цифровой камерой в этих иллюстративных примерах. Кроме того, съемочная система может быть выбрана на основании веса, качества вырабатываемых изображений или и того, и другого. Съемочная система может быть расположена на беспилотном воздушном транспортном средстве, например на винтокрылом летательном аппарате 900, представленном на фиг.9.
Далее, процесс располагает беспилотное воздушное транспортное средство по центру между рядами деревьев из группы деревьев (операция 1102). Во время операции 1102 беспилотное воздушное транспортное средство может быть расположено по центру с использованием лидарной системы и управляющего устройства. Лидарная система может измерять расстояние до соседних деревьев в каждом ряду деревьев. Управляющее устройство беспилотного воздушного транспортного средства может вычислять расстояние от беспилотного воздушного транспортного средства до рядов деревьев с использованием этих измерений и уточнять центральное расположение беспилотного воздушного транспортного средства между рядами. Может иметься необходимый зазор между беспилотным воздушным транспортным средством и деревьями, ветвями или комбинацией вышеперечисленного по обе стороны беспилотного воздушного транспортного средства.
С использованием съемочной системы беспилотного воздушного транспортного средства вырабатывают изображения деревьев (операция 1104). Затем процесс анализирует изображения с определением диаметра деревьев из группы деревьев (операция 1106), после чего процесс завершается. Диаметр может быть определен на различных высотах дерева из группы деревьев. В некоторых случаях может быть определена дополнительная информация, например диаметр ветвей, сбег дерева, наличие у дерева раздвоенного ствола или информация об измерениях в отношении дерева других типов в зависимости от конкретной реализации.
На фиг.12 проиллюстрирована блок-схема процесса определения диаметра дерева в соответствии с одним из иллюстративных вариантов реализации. Процесс, проиллюстрированный на фиг.12, может быть реализован с использованием измерительной системы 202, представленной на фиг.2, во время операции 1106, представленной на фиг.11.
Процесс начинается с определения кромок деревьев из группы деревьев на изображениях (операция 1200). Во время операции 1200 для определения кромок деревьев на изображениях, вырабатываемых съемочной системой, может быть использовано программное обеспечение для определения кромки.
Далее процесс измеряет расстояние от камеры до точек на каждом дереве из группы деревьев на изображениях (операция 1202). Это расстояние может быть определено параметрами винтокрылого летательного аппарата, выбранного в качестве беспилотного воздушного транспортного средства 300. Во время операции 1202 для определения расстояния от камеры беспилотного воздушного транспортного средства до дерева может быть использован сверхлегкий датчик с низким потреблением энергии. Этот датчик может быть сканирующим лидаром, который сканирует указанное расстояние в одной плоскости.
Процесс определяет пиксели между кромками дерева из группы деревьев на изображении (операция 1204), Далее процесс вычисляет диаметр каждого дерева из группы деревьев с использованием расстояния от камеры до каждого дерева из группы деревьев и количества пикселей между кромками каждого дерева из группы деревьев на изображении (операция 1206), после чего процесс завершается. Это вычисление может представлять собой нелинейную функцию, которая преобразует пиксельную ширину в действительную ширину на основании расстояния. Диаметр деревьев также может быть вычислен с использованием соотносительных таблиц, показывающих соотношение между пиксельной шириной и действительной шириной как функцию расстояния до объекта.
Таким образом, зная как расстояние, так и свойства камеры беспилотного воздушного транспортного средства, можно определить диаметр дерева. Например, калибровочная матрица камеры является постоянным свойством камеры, которое может быть определено путем калибровки. Матрица камеры зависит от свойств объектива и оптического датчика камеры и описывает, как точка в трехмерном пространстве может быть преобразована в точку в двумерном пространстве на изображении. Калибровочная матрица камеры может быть различной у камеры каждого типа или объектива камеры каждого типа, используемых в съемочной системе.
Блок-схемы и функциональные схемы различных описанных вариантов реализации иллюстрируют архитектуру, функциональность и работу некоторых возможных реализации устройств и способов в соответствии с одним из иллюстративных вариантов реализации. При этом каждый схемный блок блок-схемы или функциональной схемы может представлять модуль, отрезок, функцию и/или часть операции или шага. Например, один схемный блок или более может быть реализован как программный код, аппаратные средства или комбинация программного кода и аппаратных средств. В случае реализации в виде аппаратных средств они, например, могут быть интегральными схемами, выполненными с возможностью выполнения одной операции или более, представленной на блок-схеме или на функциональной схеме, или приспособленными для этого.
В некоторых других реализациях иллюстративного варианта реализации функция или функции, обозначенные на схемных блоках, могут быть осуществлены не в порядке, обозначенном на чертежах. Например, в некоторых случаях два схемных блока, изображенные последовательно, могут быть осуществлены по существу одновременно или иногда могут быть выполнены в обратном порядке в зависимости от включенной функциональности. Кроме того, в дополнение к проиллюстрированным схемным блокам блок-схем или функциональных схем могут быть добавлены другие схемные блоки.
На фиг.13 проиллюстрирована калибровочная матрица камеры в соответствии с одним из иллюстративных вариантов реализации. Калибровочная матрица 1300 камеры, представленная на этом чертеже, может быть использована в процессе, представленном на фиг.12, для вычисления показаний, относящихся к дереву.
Калибровочную матрицу 1300 камеры используют для определения реальных расстояний между элементами изображения на основании количества пикселей между этими элементами. Элементами могут быть, например, кромки дерева. Зная расстояние между кромками дерева, с использованием калибровочной матрицы 1300 камеры можно вычислить диаметр дерева.
В этом иллюстративном примере калибровочная матрица 1300 камеры является постоянным свойством камеры, которое может быть определено путем калибровки. Калибровочная матрица 1300 камеры зависит от свойств объектива и оптического датчика камеры и описывает, как точки в трехмерном пространстве преобразуются в точки в двумерном пространстве на изображении. Эти свойства объектива могут быть фокусными расстояниями в этом иллюстративном примере.
Калибровочная матрица 1300 камеры может включать фокусное расстояние 1302 и фокусное расстояние 1304, которые могут быть измерены в пикселях и которые отражают уровень силы, с которой оптика камеры обеспечивает схождение или расхождение света по каждой оси изображения для сведения лучей в фокусе.
Коэффициент 1306 учитывает перекос, вызываемый оптикой, между изображениями по двум осям и отражает то, каким способом оптика камеры может поворачивать лучи света. Константы, включенные в калибровочную матрицу 1300 камеры, являются неотъемлемыми по отношению к камере и не могут быть изменены.
Величина 1308 и величина 1310 также могут быть использованы в качестве входной информации в калибровочной матрице 1300 камеры. Как показано, величина 1308 и величина 1310 определяют принципиальную точку камеры. Эта принципиальная точка может быть центральной точкой изображения в этих иллюстративных примерах. В других иллюстративных примерах принципиальная точка может не быть центральной точкой изображения. Принципиальная точка может быть определена как пересечение оптической оси и плоскости изображения.
Калибровочная матрица 1300 камеры может быть выработана с использованием изображений тестового объекта, снятых камерой с различных предварительно определенных расстояний от этого объекта. Тестовый объект может быть, например, кубом с известными размерами. Пиксели изображений могут быть соотнесены с известными расстояниями между элементами, например кромками куба, для определения информации для выработки калибровочной матрицы 1300 камеры.
На фиг.14 проиллюстрирована функциональная схема обрабатывающей системы для обработки данных в соответствии с одним из иллюстративных вариантов реализации. Обрабатывающая система 1400 для обработки данных может быть одной из реализации компьютерной системы 220, представленной на фиг.2. В этом иллюстративном примере обрабатывающая система 1400 содержит среду 1402 для обеспечения связи, которая обеспечивает связь между процессорным блоком 1404, памятью 1406, энергостойким запоминающим устройством 1408, блоком 1410 для обеспечения связи, блоком 1412 ввода-вывода и дисплеем 1414.
Процессорный блок 1404 служит для выполнения инструкций программного обеспечения, которое может быть загружено в память 1406. Процессорный блок 1404 может быть некоторым количеством процессоров, многопроцессорным ядром или процессором другого типа в зависимости от конкретной реализации. Используемая здесь фраза «некоторое количество» применительно к объекту означает один объект или более. Кроме того, процессорный блок 1404 может быть реализован с использованием некоторого количества гетерогенных процессорных систем, содержащих главный процессор со вторичными процессорами, расположенные на одном чипе. Еще в одном иллюстративном примере процессорный блок 1404 может быть симметричной многопроцессорной системой, содержащей множество процессоров одного типа.
Память 1406 и энергостойкое запоминающее устройство 1408 являются примерами запоминающих устройств 1416. Запоминающее устройство представляет собой любой элемент аппаратных средств, способный хранить информацию, например помимо прочего данные, программный код в функциональной форме и/или другую подходящую информацию, на временной и/или постоянной основе. Запоминающие устройства 1416 в этих примерах также могут называться машиночитаемые запоминающие устройства. Память 1406 в этих примерах может быть, например, памятью с произвольным доступом или любым другим подходящим энергозависимым или энергонезависимым запоминающим устройством. Энергостойкое запоминающее устройство 1408 может быть различных видов в зависимости от конкретной реализации.
Например, энергостойкое запоминающее устройство 1408 может содержать один компонент или более или одно устройство или более. Например, энергостойкое запоминающее устройство 1408 может быть жестким диском, флэш-памятью, перезаписываемым оптическим диском,, перезаписываемой магнитной лентой или комбинацией вышеперечисленного. Носители, используемые в качестве энергостойкого запоминающего устройства 1408, также могут быть съемными. Например, в качестве энергостойкого запоминающего устройства 1408 может быть использован съемный жесткий диск.
Блок 1410 для обеспечения связи в этих примерах обеспечивает связь с другими обрабатывающими системами для обработки данных или устройствами. В этих примерах блок 1410 для обеспечения связи представляет собой сетевую карту. Блок 1410 для обеспечения связи может обеспечивать связь посредством использования физических и/или беспроводных линий связи.
Блок 1412 ввода-вывода обеспечивает ввод и вывод данных в отношении других устройств, которые могут быть соединены с обрабатывающей системой 1400. Например, блок 1412 ввода-вывода может обеспечивать соединение для получения пользовательской входной информации чрез клавиатуру, мышь и/или другие подходящие устройства ввода. Кроме того, блок 1412 ввода-вывода может направлять выходную информацию на принтер. Дисплей 1414 обеспечивает механизм для отображения информации для пользователя.
Инструкции операционной системы, приложений и/или программ могут быть расположены в запоминающих устройствах 1416, связанных с процессорным блоком 1404 через среду 1402 для обеспечения связи. В этих иллюстративных примерах инструкции расположены в функциональной форме на энергостойком запоминающем устройстве 1408. Эти инструкции могут быть загружены в память 1406 для выполнения процессорным блоком 1404. Процессы в соответствии с различными вариантами реализации могут быть выполнены процессорным блоком 1404 с использованием выполняемых компьютером инструкций, которые могут быть расположены в памяти, например в памяти 1406.
Эти инструкции называют программным кодом, используемым компьютером программным кодом или машиночитаемым программным кодом, который может быть прочитан и выполнен процессором процессорного блока 1404. Программный код в различных вариантах реализации может быть реализован на различных физических или машиночитаемых запоминающих носителях, например в памяти 1406 или в энергостойком запоминающем устройстве 1408.
Программный код 1418 расположен в функциональной форме на машиночитаемом носителе 1420, который при необходимости является съемным, и может быть загружен или перемещен в обрабатывающую систему 1400 для обработки процессорным блоком 1404. В этих примерах программный код 1418 и машиночитаемый носитель 1420 образуют программный продукт 1422. В одном из примеров машиночитаемый носитель 1420 может быть машиночитаемым запоминающем носителем 1424 или машиночитаемым сигнальным носителем 1426. Машиночитаемый запоминающий носитель 1424 может включать, например, оптический или магнитный диск, вставляемый или помещаемый в привод или другое устройство, являющееся частью энергостойкого запоминающего устройства 1408, для перемещения в запоминающее устройство, например на жесткий диск, являющееся частью энергостойкого запоминающего устройства 1408. Машиночитаемый запоминающий носитель 1424 также может представлять собой энергостойкое запоминающее устройство, например жесткий диск, флэш-накопитель или флэш-память, соединенное с обрабатывающей системой 1400. В некоторых примерах машиночитаемый запоминающий носитель 1424 может не быть съемным по отношению к обрабатывающей системе 1400. В этих иллюстративных примерах машиночитаемый запоминающий носитель 1424 является непереходным.
В другом случае программный код 1418 может быть перемещен в обрабатывающую систему 1400 с использованием машиночитаемого сигнального носителя 1426, который может быть, например, распространяемым сигналом с данными, содержащим программный код 1418. Например, машиночитаемый сигнальный носитель 1426 может быть электромагнитным сигналом, оптическим сигналом и/или сигналом другого подходящего типа. Эти сигналы могут быть переданы по линиям связи, например по беспроводным линиям связи, оптоволоконному кабелю, коаксиальному кабелю, проводнику и/или по линии связи любого другого подходящего типа. Иными словами, в этих иллюстративных примерах линии связи и/или соединение могут быть физическими или беспроводными.
В некоторых иллюстративных вариантах реализации программный код 1418 может быть загружен по сети в энергостойкое запоминающее устройство 1408 с другого устройства или с другой обрабатывающей системы для обработки данных через машиночитаемый сигнальный носитель 1426 для использования в обрабатывающей системе 1400. Например, программный код, сохраненный на машиночитаемом запоминающем носителе серверной обрабатывающей системы для обработки данных, может быть загружен по сети с указанного сервера в обрабатывающую систему 1400. Обрабатывающая система для обработки данных, предоставляющая программный код 1418, может быть серверным компьютером, клиентским компьютером или другим устройством, способным хранить и передавать программный код 1418.
Различные проиллюстрированные компоненты обрабатывающей системы 1400 не следует рассматривать как накладывающие архитектурные ограничения на способ, которым могут быть реализованы различные варианты реализации. В обрабатывающей системе для обработки данных могут быть реализованы различные иллюстративные варианты реализации, включая те, которые содержат компоненты в дополнение к проиллюстрированным применительно к обрабатывающей системе 1400 или вместо них. Другие компоненты, изображенные на фиг.14, могут отличаться от показанных иллюстративных примеров. Могут быть реализованы различные варианты реализации с использованием аппаратных устройств и систем, способных запускать программный код. В одном из примеров обрабатывающая система для обработки данных может включать органические компоненты, интегрированные с неорганическими компонентами, и/или состоять полностью из органических компонентов, исключая человека. Например, запоминающее устройство может содержать органические полупроводники.
Еще в одном примере запоминающее устройство обрабатывающей системы 1400 представляет собой любое аппаратное устройство, которое может хранить данные. Память 1406, энергостойкое запоминающее устройство 1408 и машиночитаемый носитель 1420 являются примерами запоминающих устройств в физической форме.
Еще в одном примере для реализации среды 1402 для обеспечения связи может быть использована шинная система, которая может содержать одну шину или более, например системную шину или шину ввода-вывода. Разумеется, шинная система может быть реализована с использованием архитектуры любого подходящего типа, которая обеспечивает передачу данных между различными компонентами или устройствами, соединенными с шинной системой. Кроме того, блок для обеспечения связи может включать одно устройство или более, используемое для передачи и приема данных, например модем или сетевую карту. Кроме того, память может быть, например, памятью 1406 или кэш-памятью, например имеющейся в интерфейсе или контроллере-концентраторе памяти, которые могут иметься в среде 1402 для обеспечения связи.
Таким образом, иллюстративные варианты реализации предлагают способ и устройство для определения некоторого количества диаметров группы деревьев. При использовании иллюстративного варианта реализации беспилотное воздушное транспортное средство движется по маршруту через группу деревьев на высоте, обеспечивающей измерение указанного некоторого количества диаметров группы деревьев.
Использование беспилотного воздушного транспортного средства, летающего между рядами деревьев из группы деревьев, обеспечивает более быструю и экономичную выработку информации о некотором количестве диаметров группы деревьев, чем с помощью используемых в настоящее время способов, например с помощью получения выборки вручную. Кроме того, так как беспилотное воздушное транспортное средство может лететь через весь лес и измерять каждый диаметр каждого дерева более быстро и легко, обеспечена выработка более точной информации для персонала, осуществляющего лесопользование. Эта информация может быть использована персоналом, осуществляющим лесопользование, для принятия решений по лесным операциям более быстро и легко, чем при использовании других способов измерения.
Описание различных иллюстративных вариантов реализации представлено в целях иллюстрации и описания и не является исчерпывающим или ограниченным указанными вариантами реализации в раскрытой форме. Для специалистов очевидны различные модификации и изменения. Кроме того, различные иллюстративные варианты реализации могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации. Эти варианты реализации, или выбранные варианты реализации, выбраны и описаны для наилучшего объяснения их принципов, практического использования, а также чтобы позволить другим специалистам понять описание различных вариантов реализации с различными модификациями с точки зрения их пригодности к конкретному предполагаемому использованию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И ВОЗДУШНАЯ СИСТЕМА ДЛЯ ИНВЕНТАРИЗАЦИИ ЛЕСА (варианты) | 2013 |
|
RU2651377C2 |
| ИЗВЛЕЧЕНИЕ ИНФОРМАЦИИ О ВОЗДУШНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ С ИСПОЛЬЗОВАНИЕМ БОРТОВЫХ МЕТОК РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ | 2016 |
|
RU2717882C2 |
| СИСТЕМА АДАПТИВНОЙ ФИЛЬТРАЦИИ ДЛЯ АЭРОДИНАМИЧЕСКИХ УГЛОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2735751C2 |
| АКТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА С ПЕРЕМЕННЫМ РАЗРЕШЕНИЕМ | 2016 |
|
RU2721304C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УХУДШЕНИЯ ЛИДАРНЫХ ДАННЫХ | 2021 |
|
RU2826476C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2789564C1 |
| Система и способ очистки датчиковой поверхности датчиковой системы | 2021 |
|
RU2798389C2 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
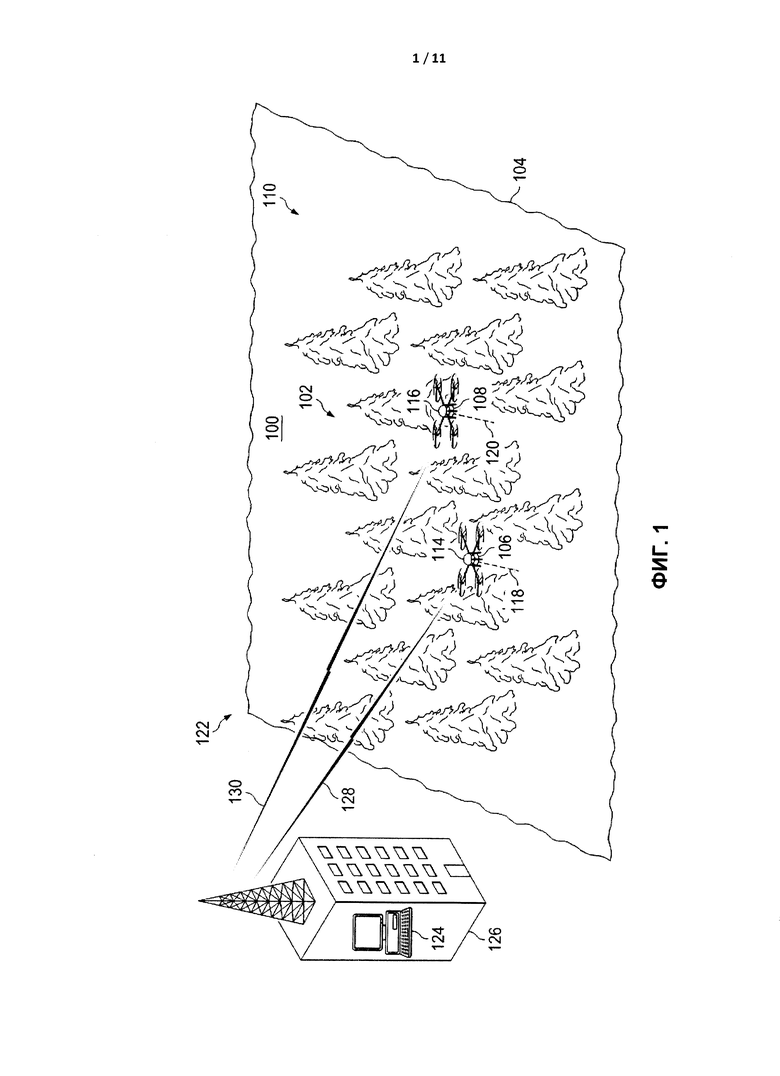
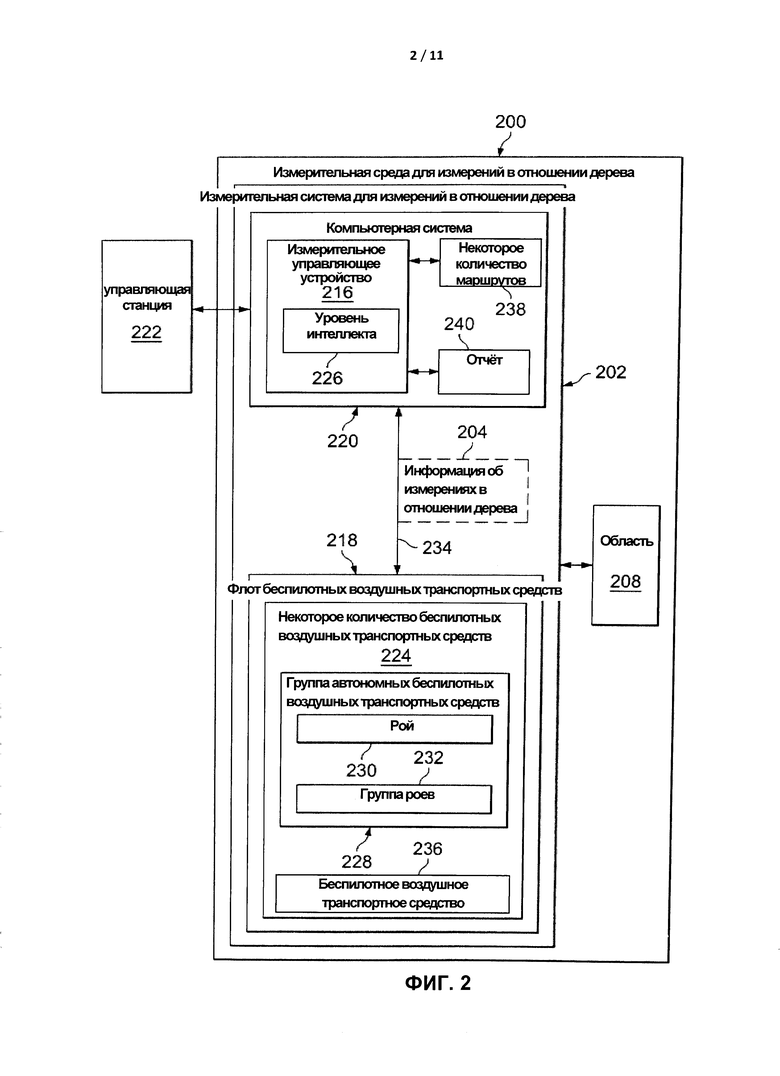
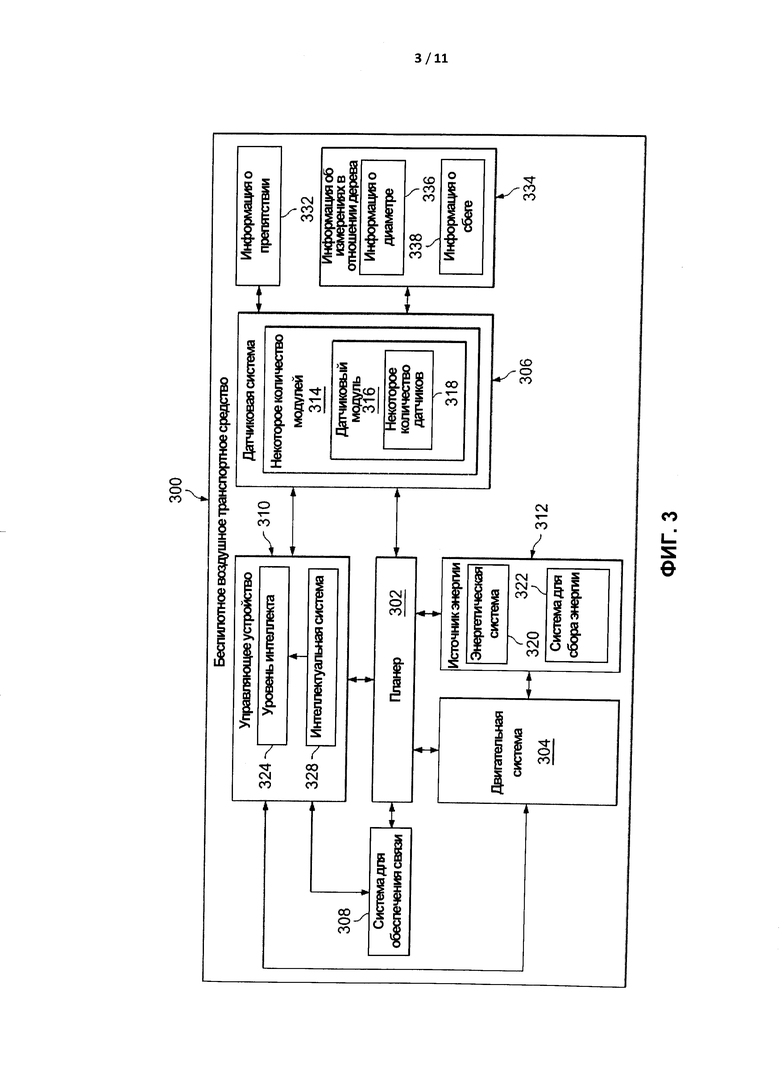
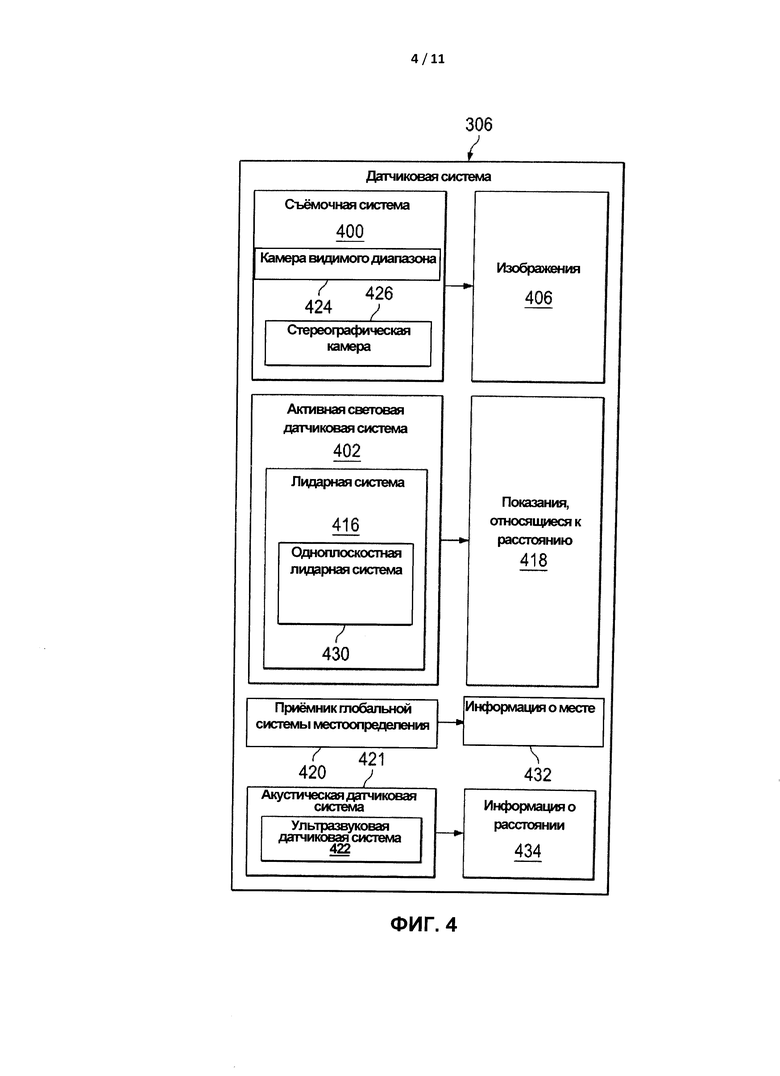
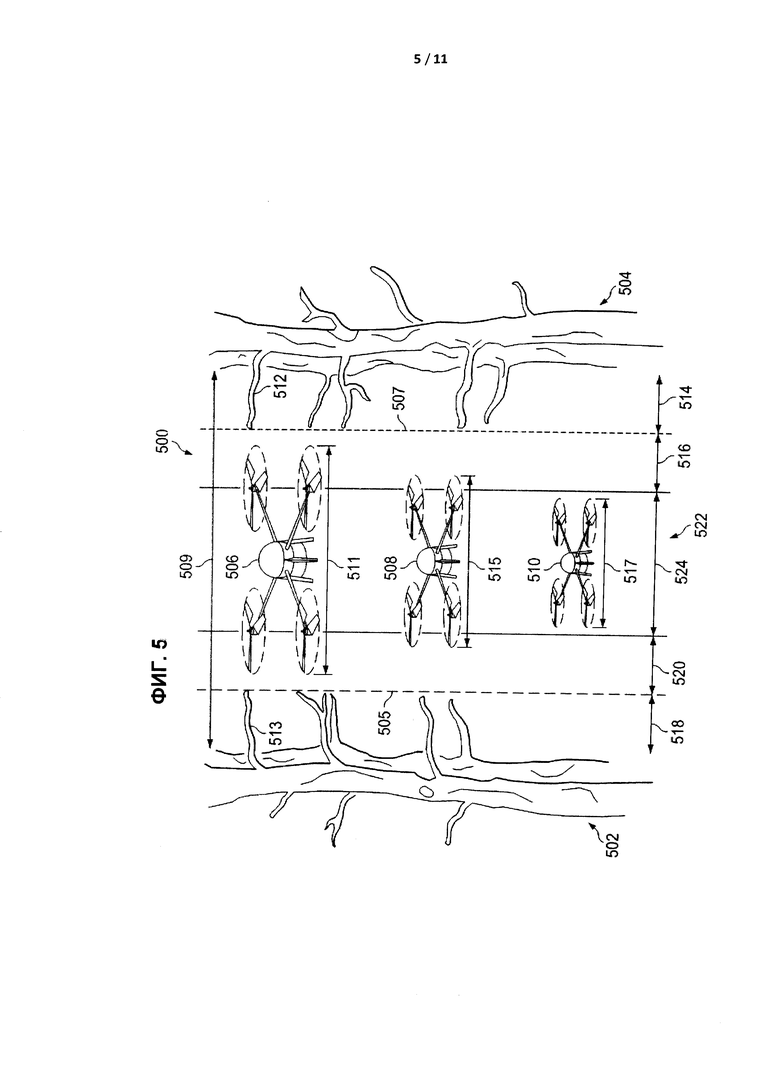
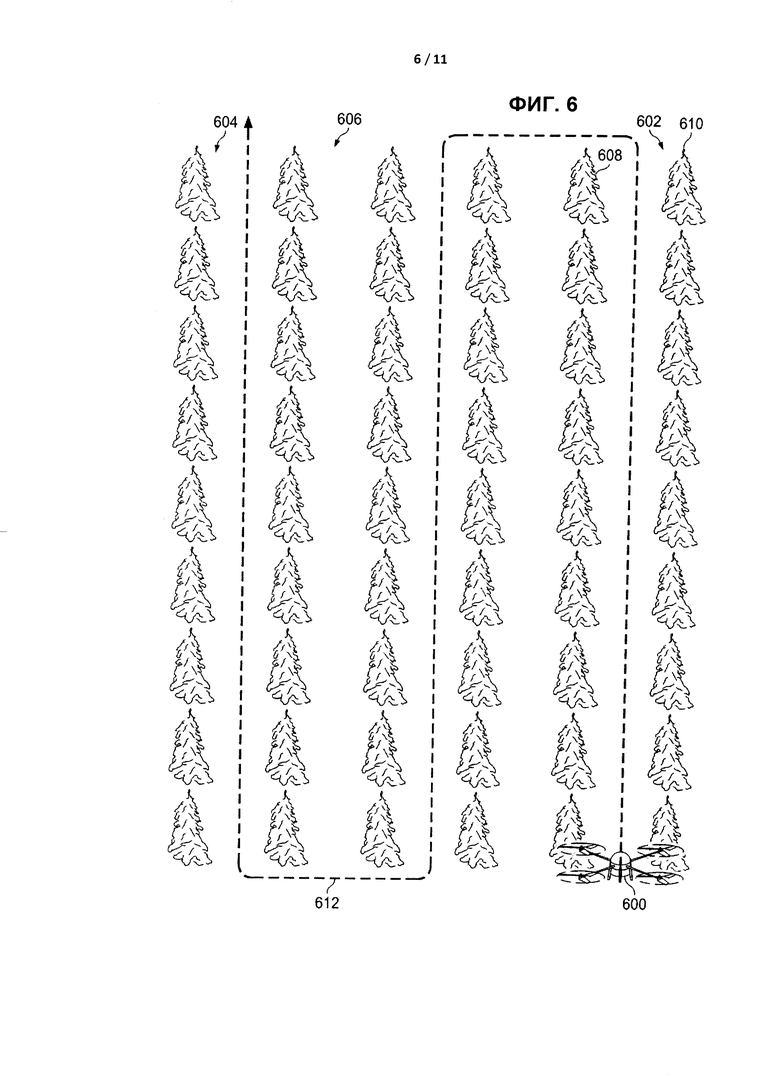
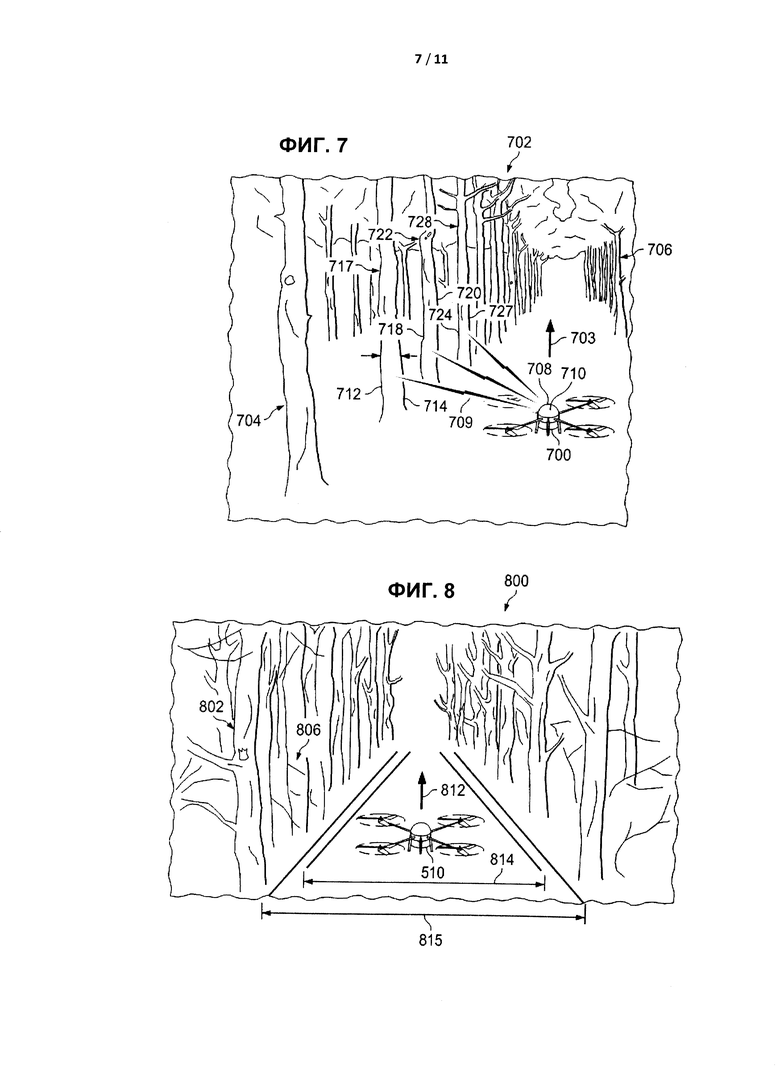
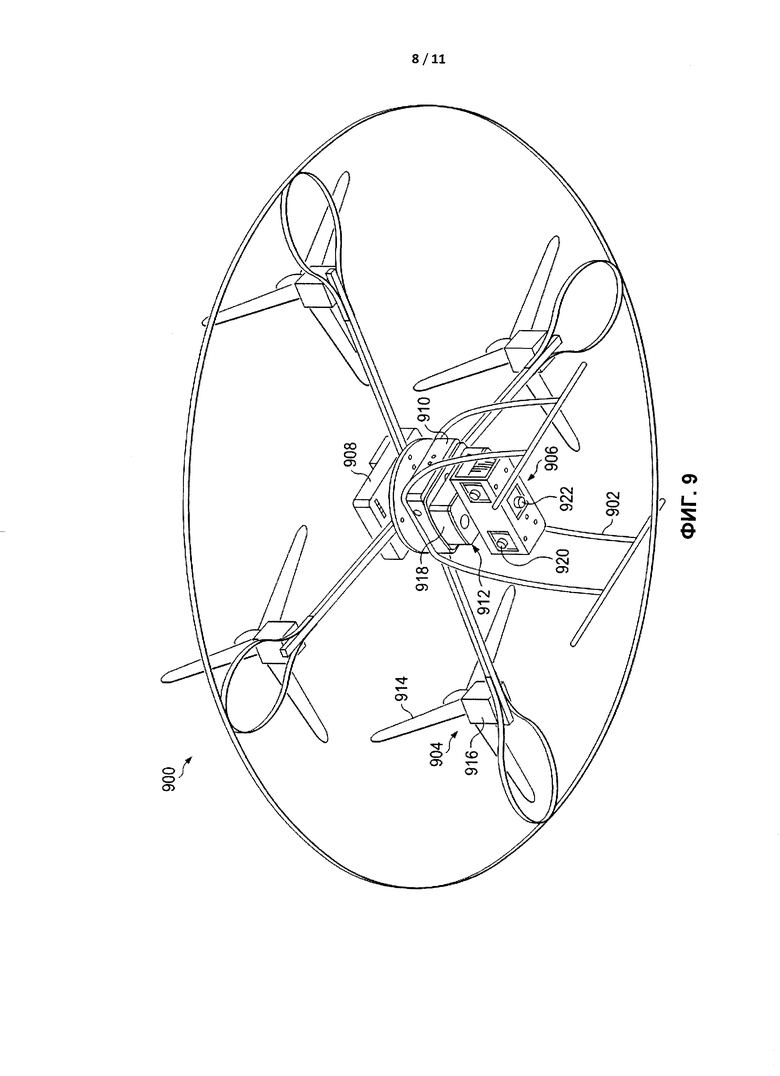
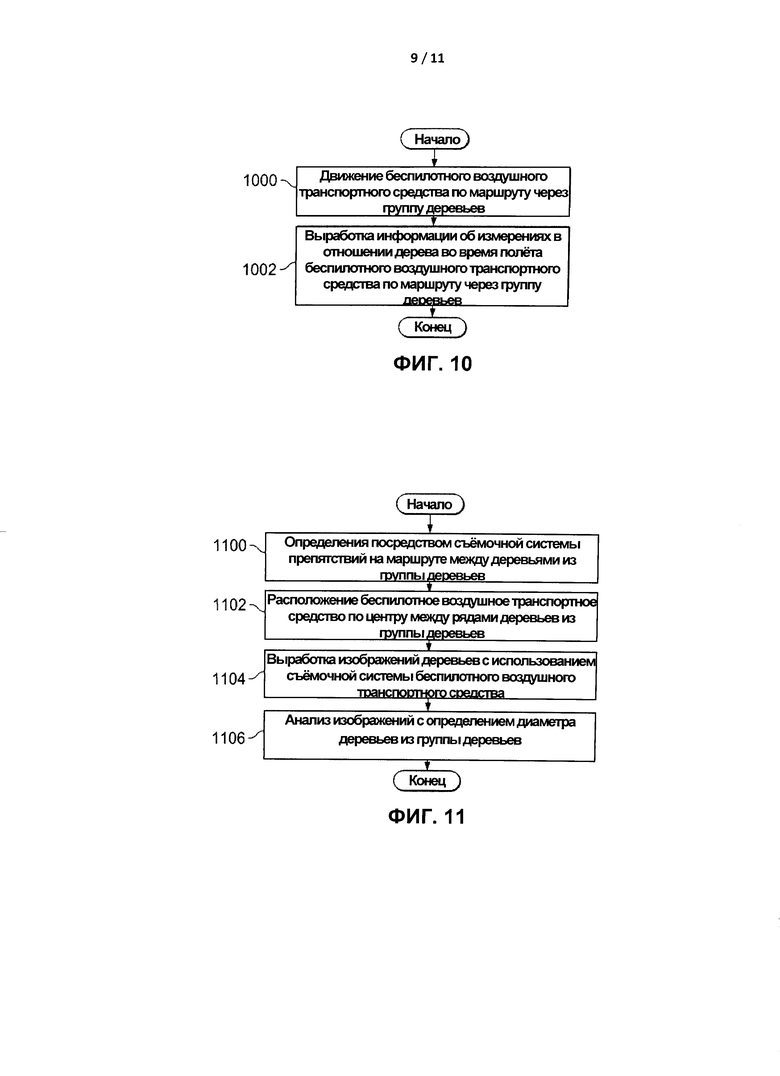
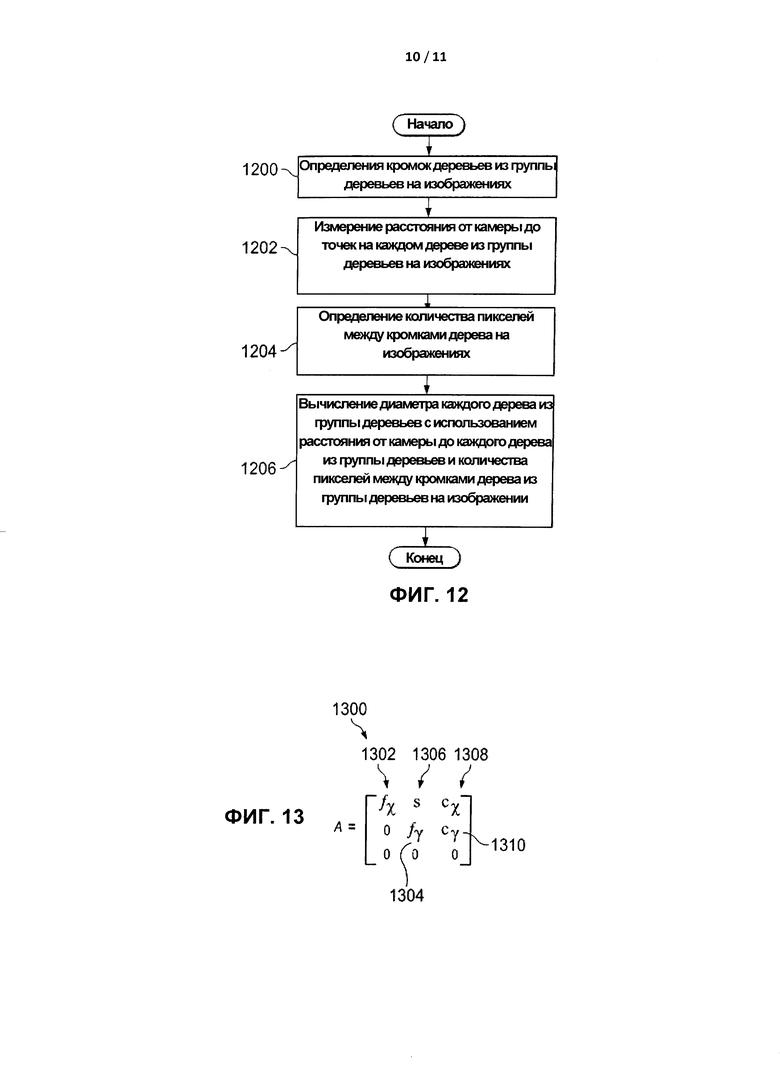
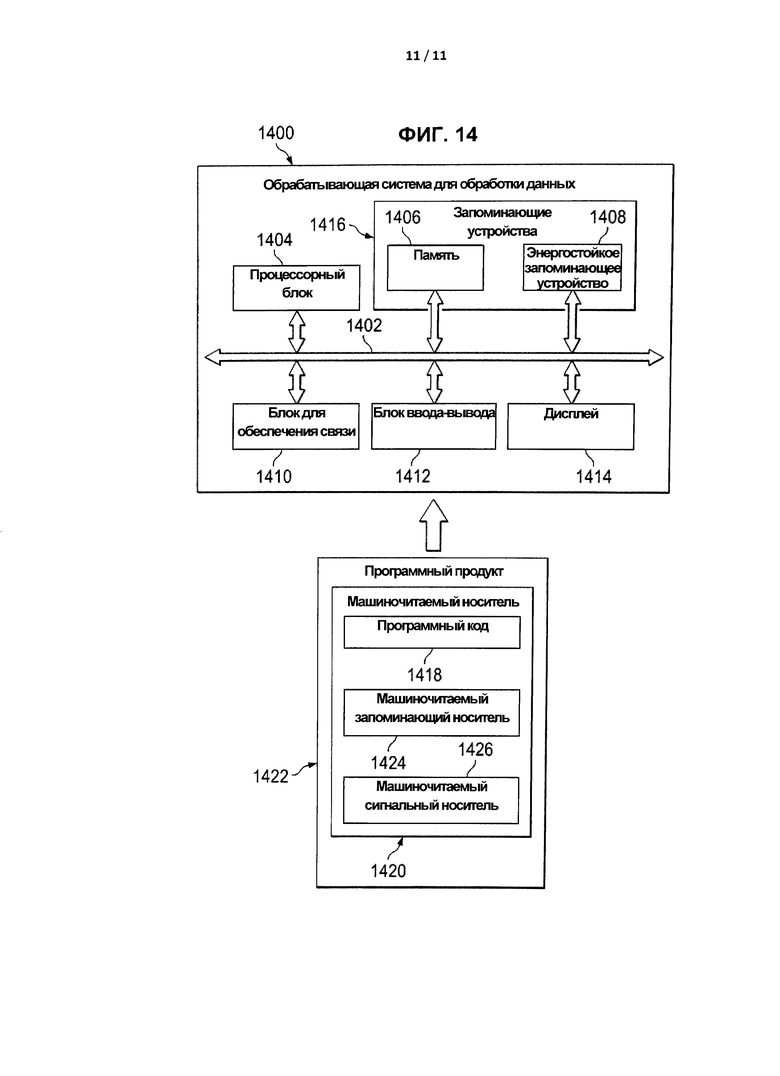
Изобретение относится к области лесопользования, в частности к определению состояния деревьев в лесных массивах. Устройство для выполнения измерений в группе деревьев содержит беспилотное воздушное транспортное средство (236), датчиковую систему (306), связанную с беспилотным воздушным транспортным средством (236), управляющее устройство (310). Беспилотное воздушное транспортное средство (236) движется по маршруту (522) через группу деревьев (206) на высоте, обеспечивающей возможность измерения указанного некоторого количества диаметров группы деревьев (206) посредством датчиковой системы (306), связанной с беспилотным воздушным транспортным средством (236). Вырабатывают информацию об указанном некотором количестве диаметров группы деревьев (206) с использованием датчиковой системы (306), связанной с беспилотным воздушным транспортным средством (236). Обеспечивается снижение трудозатрат персонала и повышение точности измерений. 3 н. и 17 з.п. ф-лы, 14 ил.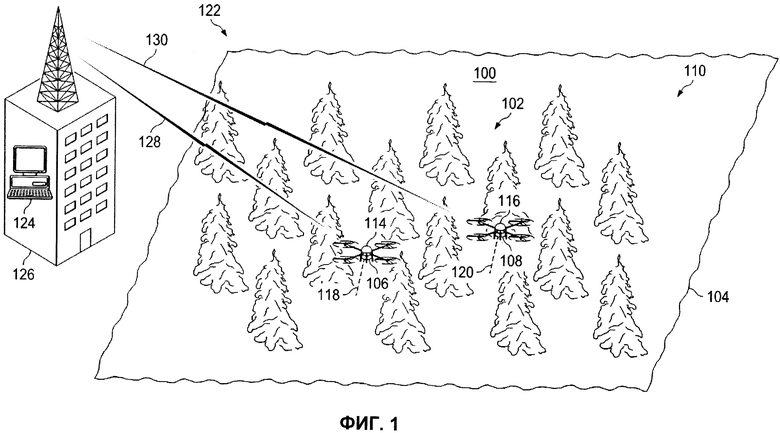
1. Устройство для выполнения измерений в группе деревьев, содержащее
беспилотное воздушное транспортное средство (236);
датчиковую систему (306), связанную с беспилотным воздушным транспортным средством (236) и выполненную с возможностью выработки информации (332) о препятствии и информации (204) об измерениях в отношении дерева; и
управляющее устройство (310), выполненное с возможностью определения препятствий на основании информации (332) о препятствии, вырабатываемой датчиковой системой (306) при полете беспилотного воздушного транспортного средства (236) через группу деревьев (206) для выработки указанной информации (204) об измерениях в отношении дерева, относящейся к этой группе деревьев (206), и с возможностью управления движением беспилотного воздушного транспортного средства (236) для избегания препятствий.
2. Устройство по п. 1, в котором управляющее устройство (310) выполнено с возможностью управления движением беспилотного воздушного транспортного средства (236) через группу деревьев (206) с избеганием препятствий при выработке информации (204) об измерениях в отношении дерева, относящейся к этой группе деревьев (206).
3. Устройство по п. 1, в котором информация (204) об измерениях в отношении дерева представляет собой информацию (336) о диаметре, относящуюся к указанной группе деревьев (206), а управляющее устройство (310) выполнено с возможностью управления движением беспилотного воздушного транспортного средства (236) по траектории (703), проходящей между деревьями из группы деревьев (206), при выработке информации (336) о диаметре, относящейся к указанной группе деревьев (206).
4. Устройство по п. 1, в котором маршрут (522) обеспечивает возможность измерений в отношении группы деревьев (206) с выработкой информации (204) об измерениях в отношении дерева.
5. Устройство по п. 1, в котором датчиковая система (306) содержит лидарную систему (416) и съемочную систему (400).
6. Устройство по п. 5, в котором лидарная система (416) выполнена с возможностью выработки расстояний до точек на группе деревьев (206), съемочная система (400) выполнена с возможностью выработки изображений препятствий, а управляющее устройство (310) выполнено с возможностью выработки информации (204) об измерениях в отношении дерева с использованием лидарной системы (416).
7. Устройство по п. 6, в котором управляющее устройство (310) выполнено с возможностью выработки маршрута (522) через препятствия с использованием указанных изображений и информации (434) о расстоянии, относящейся к препятствиям, и с возможностью выработки диаметров на основании информации (204) об измерениях в отношении дерева.
8. Устройство по п. 1, в котором информация (204) об измерениях в отношении дерева выбрана по меньшей мере из одного элемента группы, включающей информацию (336) о диаметре, информацию (338) о сбеге, плотность деревьев, тип дерева и промежуток между деревьями.
9. Устройство по п. 1, в котором датчиковая система (306) содержит по меньшей мере один элемент группы, включающей активную световую датчиковую систему (402), лидарную систему (416), съемочную систему (400), лазерный альтиметр, времяпролетную съемочную систему (400), камеру для получения изображения со всеми элементами в фокусе и стереографическую камеру.
10. Устройство по п. 1, также содержащее
измерительное управляющее устройство (216), выполненное с возможностью приема информации (204) об измерениях в отношении дерева и с возможностью ее анализа.
11. Устройство по п. 1, в котором беспилотное воздушное транспортное средство (236) выбрано из одного из элементов группы, включающей беспилотное воздушное транспортное средство (236) с неподвижным крылом и беспилотный винтокрылый летательный аппарат.
12. Устройство по п. 1, в котором группа деревьев (206) расположена в месте, выбранном из одного из элементов группы, включающей лесную ферму, сосновую плантацию, лес, парк и гору.
13. Измерительная система для измерений в отношении дерева, содержащая
беспилотное воздушное транспортное средство (236);
съемочную систему (400), связанную с беспилотным воздушным транспортным средством (236) и выполненную с возможностью выработки изображений;
лидарную систему (416), связанную с беспилотным воздушным транспортным средством (236) и выполненную с возможностью выработки показаний (418), относящихся к расстоянию от беспилотного воздушного транспортного средства (236) до точек на группе деревьев (206); и
управляющее устройство (310), выполненное с возможностью определения препятствий на основании изображений, вырабатываемых съемочной системой (400) при полете беспилотного воздушного транспортного средства (236) через группу деревьев (206) для выработки информации (336) о диаметре, относящейся к этой группе деревьев (206), и с возможностью управления движением беспилотного воздушного транспортного средства (236) через группу деревьев (206) для избегания препятствий во время выработки лидарной системой (416) указанной информации (336) о диаметре.
14. Система по п. 13, также содержащая
измерительное управляющее устройство (216), выполненное с возможностью приема информации (336) о диаметре и с возможностью ее анализа.
15. Способ определения некоторого количества диаметров группы деревьев (206), включающий
обеспечение движения беспилотного воздушного транспортного средства (236) по маршруту (522) через группу деревьев (206) на высоте, обеспечивающей возможность измерения указанного некоторого количества диаметров группы деревьев (206) посредством датчиковой системы (306), связанной с беспилотным воздушным транспортным средством (236);
выработку информации об указанном некотором количестве диаметров группы деревьев (206) с использованием датчиковой системы (306), связанной с беспилотным воздушным транспортным средством (236),
прием указанного некоторого количества диаметров; и
анализ указанного некоторого количества диаметров с использованием измерительного управляющего устройства (216).
16. Способ по п. 15, в котором шаг выработки включает
выработку некоторого количества изображений (406) группы деревьев (206) с использованием съемочной системы (400) в составе датчиковой системы (306); и
измерение расстояний до точек на группе деревьев (206) с использованием активной световой датчиковой системы (402) в составе датчиковой системы (306), причем указанные некоторое количество изображений (406) и расстояния образуют информацию об указанном некотором количестве диаметров.
17. Способ по п. 16, также включающий
определение количества пикселей между кромками каждого дерева из группы деревьев (206) на изображении; и
вычисление диаметра каждого дерева из группы деревьев (206) с использованием расстояния от съемочной системы (400) до каждого дерева из группы деревьев (206) и количества пикселей между кромками каждого дерева из группы деревьев (206) на изображении.
18. Способ по п. 16, также включающий
выработку маршрута (522) через препятствия в группе деревьев (206) с использованием указанных некоторого количества изображений и расстояний.
19. Способ по п. 15, в котором беспилотное воздушное транспортное средство (236) является частью группы беспилотных воздушных транспортных средств (236) и который включает
управление группой беспилотных воздушных транспортных средств (236) в рое (230) таким образом, что эта группа беспилотных воздушных транспортных средств (236) вырабатывает информацию о некотором количестве диаметров группы деревьев (206) с использованием множества датчиковых систем, связанных с указанной группой беспилотных воздушных транспортных средств (236).
20. Способ по п. 15, также включающий
прием указанного некоторого количества диаметров; и
анализ указанного некоторого количества диаметров с использованием измерительного управляющего устройства (216).
| US 6792684 B1, 21.09.2004 | |||
| US 20080260237 A1, 23.10.2008 | |||
| ИНЪЕКЦИОННАЯ ИГЛА | 2009 |
|
RU2515147C2 |
| US 5581250 A1, 03.12.1996 | |||
| СИСТЕМА ОБХОДА ОТ ПРЕПЯТСТВИЙ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НЕСУЩИМ ВИНТОМ | 2004 |
|
RU2312797C2 |

