Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству помощи при парковке для помощи в совмещении принимающего электрическую мощность устройства на стороне транспортного средства с передающим электрическую мощность устройством на стороне земли.
Уровень техники
[0002] Были разработаны беспроводные зарядные системы, которые заряжают аккумуляторные батареи, установленные в транспортных средствах, таких как электрические транспортные средства и гибридные транспортные средства, через беспроводное соединение без использования штепселей. Точное совмещение принимающих электрическую мощность устройств на стороне транспортного средства с передающими электрическую мощность устройствами на стороне земли является важным для реализации эффективного заряда в таких беспроводных зарядных системах. Патентная литература 1 описывает систему для помощи в совмещении принимающего электрическую мощность устройства на стороне транспортного средства с передающим электрическую мощность устройством на стороне земли, система использует слабое возбуждение, чтобы вычислять расстояние между катушками, и отображает результат, полученный таким образом.
Список ссылок
Патентные документы
[0003] Патентный документ 1. Публикация японской патентной заявки № 2011-015549
Сущность изобретения
[0004] Результат, сообщаемый системой, описанной в патентном документе 1, однако, может приводить в замешательство водителя относительно того, в какой момент времени водитель должен применять тормоза. В результате, водитель может переезжать за точку остановки вследствие задержки в применении тормозов.
[0005] Настоящее изобретение было осуществлено, принимая во внимание вышеописанную традиционную проблему. Целью настоящего изобретения является предоставление устройства помощи при парковке для помощи в управлении торможением заранее, чтобы улучшать точность позиционирования транспортного средства.
[0006] Устройство помощи при парковке согласно аспекту настоящего изобретения измеряет напряжение катушки транспортного средства, обнаруживает изменение в измеренном напряжении, уведомляет водителя о первом торможении, когда изменение в измеренном напряжении сдвигается с направления увеличения на направление уменьшения, и уведомляет водителя о втором торможении, когда изменение в напряжении сдвигается с направления уменьшения на направление увеличения.
Краткое описание чертежей
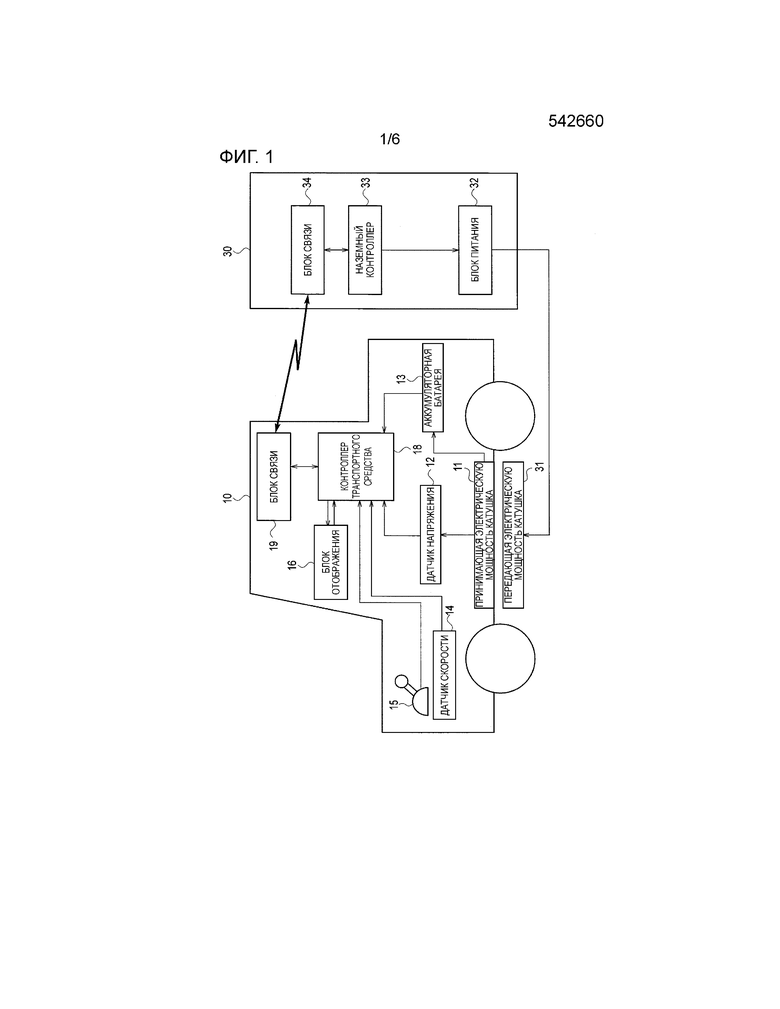
[0007] Фиг. 1 - это схема конфигурации, показывающая целиком беспроводную зарядную систему, включающую в себя транспортное средство, оборудованное устройством помощи при парковке согласно первому варианту осуществления настоящего изобретения, и устройство подачи электрической мощности.
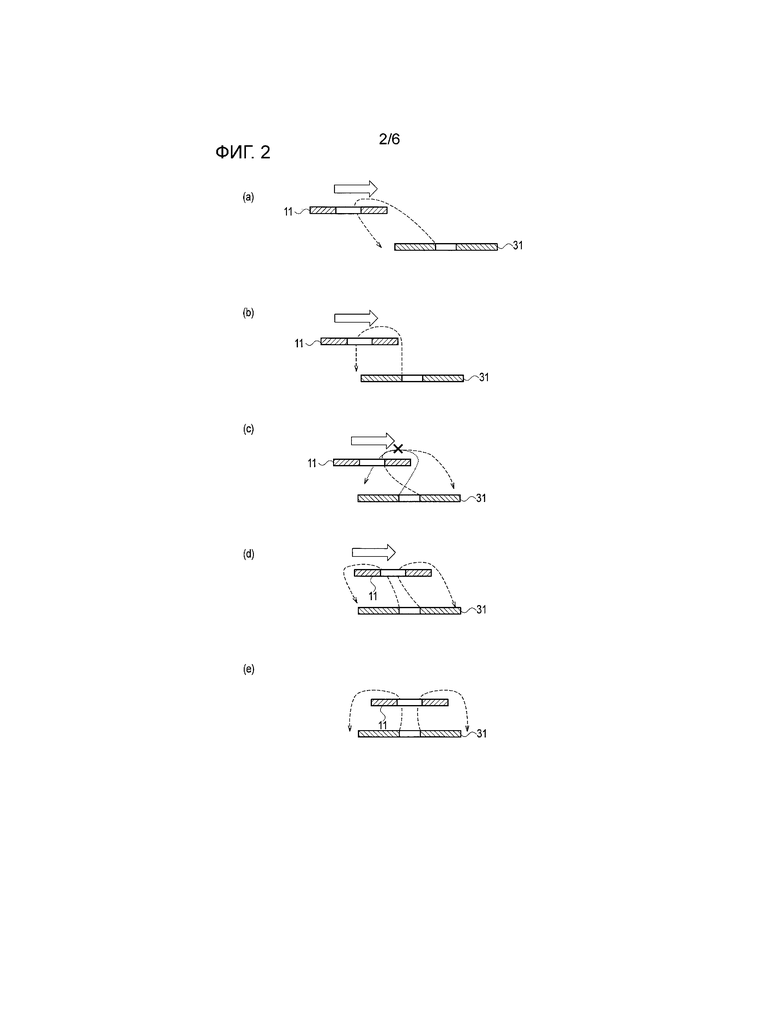
Фиг. 2(a)-2(e) -это схематичные виды, иллюстрирующие позиционное соотношение между принимающей электрическую мощность катушкой и передающей электрическую мощность катушкой.
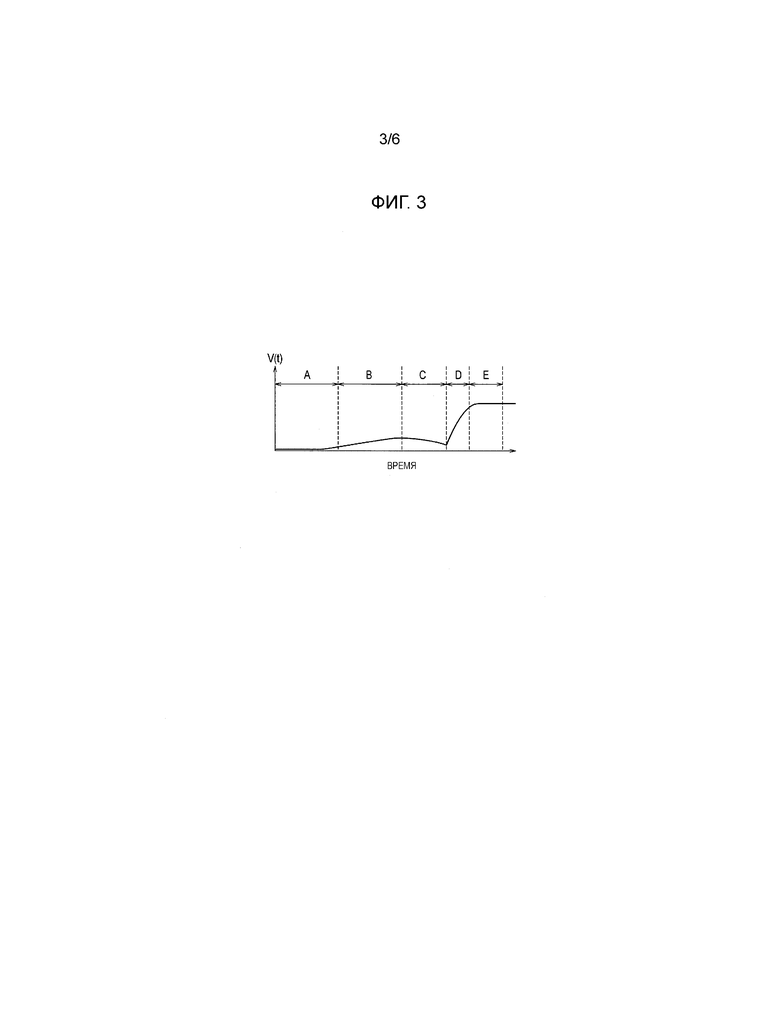
Фиг. 3 - это график, показывающий напряжение принимающей электрическую мощность катушки, изменяющееся, когда принимающая электрическую мощность катушка становится ближе к передающей электрическую мощность катушке.
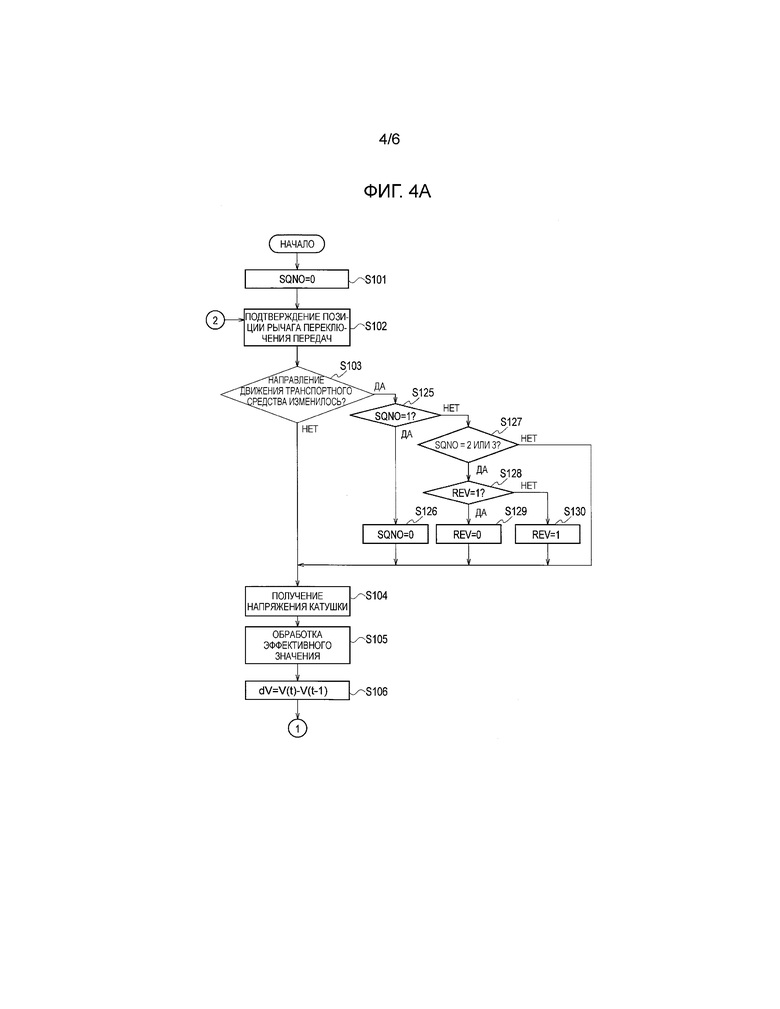
Фиг. 4-A - это блок-схема последовательности операций, иллюстрирующая операцию помощи при парковке, реализуемую посредством устройства помощи при парковке согласно первому варианту осуществления настоящего изобретения.
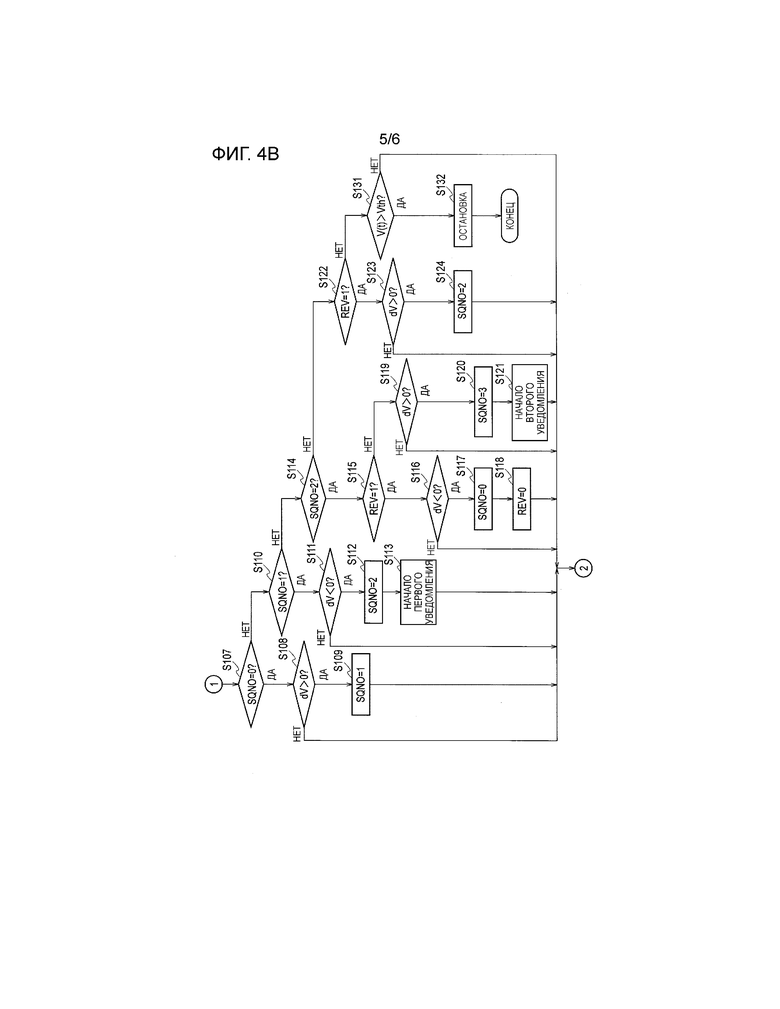
Фиг. 4-B - это блок-схема последовательности операций, иллюстрирующая операцию помощи при парковке, реализуемую посредством устройства помощи при парковке согласно первому варианту осуществления настоящего изобретения.
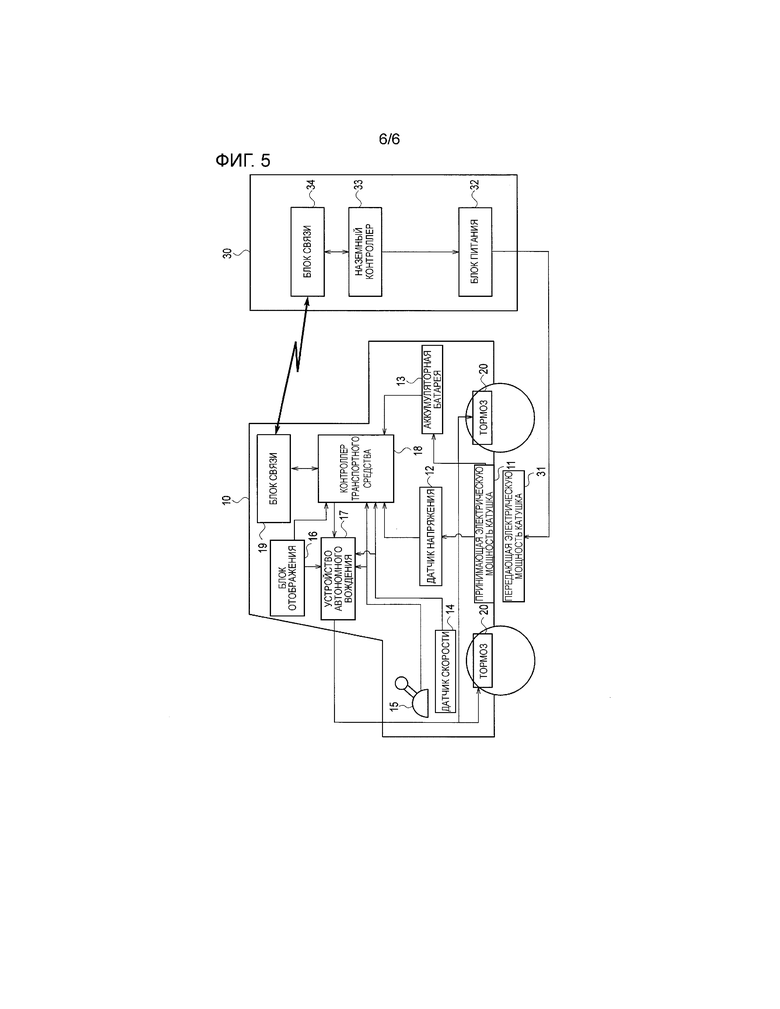
Фиг. 5 - это схема конфигурации, показывающая всю беспроводную зарядную систему, включающую в себя транспортное средство, оборудованное устройством помощи при парковке согласно второму варианту осуществления настоящего изобретения, и устройство подачи электрической мощности.
Подробное описание вариантов осуществления
[0008] Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи. Одинаковые элементы в описаниях чертежей обозначаются одинаковыми ссылочными номерами, и их объяснения не повторяются ниже.
[0009] [Первый вариант осуществления]
Конфигурация беспроводной зарядной системы согласно первому варианту осуществления настоящего изобретения описывается ниже. Как показано на фиг. 1, беспроводная зарядная система включает в себя устройство 30 подачи электрической мощности, размещенное на станции подачи электрической мощности или парковочном месте, например, и транспортное средство 10 и подает электрическую мощность через беспроводное соединение от передающей электрическую мощность катушки 31, предусмотренной в устройстве 30 подачи электрической мощности, к принимающей электрическую мощность катушке 11, установленной в транспортном средстве 10. Более конкретно, беспроводная зарядная система проводит передачу и прием высокочастотной электрической мощности между передающей электрическую мощность катушкой 31 и принимающей электрическую мощность катушкой 11 беспроводным образом через электромагнитную индукцию. Когда напряжение прикладывается к передающей электрическую мощность катушке 31, магнитное соединение возникает между передающей электрическую мощность катушкой 31 и принимающей электрическую мощность катушкой 11, с тем, чтобы подавать электрическую мощность от передающей электрическую мощность катушки 31 к принимающей электрическую мощность катушке 11. Принимающая электрическую мощность катушка 11 размещается в транспортном средстве 10 так, чтобы быть совмещенной с передающей электрическую мощность катушкой 31, когда транспортное средство 10 припарковано в предварительно определенной позиции на парковочном месте.
[0010] Устройство 30 подачи электрической мощности включает в себя блок 32 питания для подачи тока, чтобы возбуждать передающую электрическую мощность катушку 31, наземный контроллер 33 для управления работой блока 32 питания, блок 34 связи для связи с блоком 19 связи транспортного средства 10.
[0011] Транспортное средство 10 включает в себя принимающую электрическую мощность катушку 11, установленную на поверхности днища, датчик 12 напряжения для измерения напряжения принимающей электрическую мощность катушки 11, и аккумуляторную батарею 13 для накопления принимаемой электрической мощности. Транспортное средство 10 дополнительно включает в себя датчик 14 скорости для измерения скорости транспортного средства 10, рычаг 15 переключения передач, блок 16 отображения для отображения и указания различных видов информации водителю, блок 19 связи для связи с блоком 34 связи устройства 30 подачи электрической мощности, и контроллер 18 транспортного средства.
[0012] Блок 16 отображения является устройством навигации транспортного средства, например, для указания фрагментов информации водителю и подтверждения действия водителя.
[0013] Контроллер 18 транспортного средства принимает сигналы от датчика 12 напряжения, аккумуляторной батареи 13, датчика 14 скорости и рычага 15 переключения передач и управляет информацией, отображаемой в блоке 16 отображения. Контроллер 18 транспортного средства также передает запрос передачи тестового сигнала блоку 34 связи через блок 19 связи, когда принимающая электрическую мощность катушка 11, установленная в транспортном средстве 10, становится ближе к передающей электрическую мощность катушке 31. Наземный контроллер 33 затем обнаруживает запрос передачи тестового сигнала и выводит тестовый сигнал передающей катушке 31. Тестовый сигнал может быть сигналом, передаваемым с той же электрической мощностью, что и в случае передачи электрической мощности после начала заряда, но предпочтительно является сигналом с более слабой электрической мощностью, чем мощность во время обычной передачи электрической мощности. Слабое возбуждение затем проводится от передающей электрическую мощность катушки 31 к принимающей электрическую мощность катушке 11 с помощью тестового сигнала.
[0014] Наземный контроллер 33 и контроллер 18 транспортного средства могут быть компьютером на интегральных схемах, включающим в себя центральный процессор (CPU) и носитель хранения информации, такой как RAM, ROM или жесткий диск. Принимающая электрическую мощность катушка 11 и передающая электрическую мощность катушка 31 могут быть дискового типа или соленоидного типа.
[0015] Далее, способ совмещения принимающей электрическую мощность катушки 11 с передающей электрическую мощность катушкой 31 согласно настоящему варианту осуществления описывается ниже со ссылкой на фиг. 2 и фиг. 3. Вертикальная ось на фиг. 3 показывает напряжение принимающей электрическую мощность катушки 11, а горизонтальная ось показывает время.
[0016] Как показано на фиг. 2(a) и указано посредством области A на фиг. 3, когда принимающая электрическую мощность катушка 11 становится близкой к передающей электрическую мощность катушке 31, магнитный поток, выводимый из передающей электрическую мощность катушки 31, проникает в принимающую электрическую мощность катушку 11, так что напряжение формируется в принимающей электрическую мощность катушке 11.
[0017] Как показано на фиг. 2(b) и указано посредством области B на фиг. 3, когда принимающая электрическую мощность катушка 11 становится ближе к передающей электрическую мощность катушке 31, магнитный поток, проникающий в принимающую электрическую мощность катушку 11, увеличивается, и напряжение, формируемое в принимающей электрическую мощность катушке 11, также увеличивается.
[0018] Как показано на фиг. 2(c) и указано посредством области C на фиг. 3, когда принимающая электрическую мощность катушка 11 становится гораздо ближе к передающей электрическую мощность катушке 31, фрагменты магнитного потока, проникающего в принимающую электрическую мощность катушку 11, пересекаются, чтобы противодействовать друг другу, чтобы уменьшать напряжение, формируемое в принимающей электрическую мощность катушке 11.
[0019] Как показано на фиг. 2(d) и указано посредством области D на фиг. 3, когда принимающая электрическую мощность катушка 11 становится гораздо ближе к передающей электрическую мощность катушке 31, фрагменты магнитного потока прекращают пересекаться, так что магнитный поток, проникающий в принимающую электрическую мощность катушку 11, увеличивается, и напряжение, формируемое в принимающей электрическую мощность катушке 11, значительно увеличивается.
[0020] Как показано на фиг. 2(e) и указано посредством области E на фиг. 3, когда принимающая электрическую мощность катушка 11 находится непосредственно напротив передающей электрическую мощность катушки 31, напряжение, формируемое в принимающей электрическую мощность катушке 11, максимизируется.
[0021] Как описано выше, изменение в напряжении, формируемом в принимающей электрическую мощность катушке 11, попеременно сдвигается положительно, отрицательно и положительно, когда принимающая электрическую мощность катушка 11 становится ближе к передающей электрическую мощность катушке 31. Настоящий вариант осуществления реализует помощь в позиционировании с помощью изменения в напряжении. Помощь в позиционировании, управляемая посредством контроллера 18 транспортного средства, описывается ниже со ссылкой на блок-схемы последовательностей операций, показанные на фиг. 4-A и фиг. 4-B. Процесс начинается, когда водитель нажимает кнопку начала парковки, отображенную в блоке 16 отображения, например. Блок-схемы последовательностей операций иллюстрируют случай парковки задним ходом.
[0022] На этапе S101 контроллер 18 транспортного средства устанавливает номер последовательности (SQNO) равным нулю. SQNO является идентификационным номером, используемым, когда контроллер 18 транспортного средства выполняет предварительно определенное управление.
[0023] На этапе S102 контроллер 18 транспортного средства обнаруживает позицию рычага 15 переключения передач. Контроллер 18 транспортного средства устанавливает REV равным нулю, когда рычаг 15 переключения передач находится в диапазоне заднего хода, и устанавливает REV в единицу, когда рычаг 15 переключения передач находится в диапазоне вождения.
[0024] На этапе S103 контроллер 18 транспортного средства определяет, изменилось ли направление движения транспортного средства 10, согласно обнаруженной позиции рычага 15 переключения передач. Причина для определения изменения направления движения транспортного средства 10 описывается подробно ниже. Последующее является случаем, в котором контроллер 18 транспортного средства определяет, что направление движения транспортного средства 10 не изменилось, и процесс переходит к этапу S104.
[0025] На этапе S104 контроллер 18 транспортного средства получает напряжение принимающей электрическую мощность катушки 11 от датчика 12 напряжения.
[0026] На этапе S105 контроллер 18 транспортного средства преобразует получаемое напряжение принимающей электрическую мощность катушки 11 в эффективное значение.
[0027] На этапе S106 контроллер 18 транспортного средства вычисляет изменение в напряжении (dV) принимающей электрическую мощность катушки 11 согласно следующему уравнению.
[0028] [Мат.формула 1]
dV=V(t)-V(t-1)... (1)
[0029] На этапе S107 контроллер 18 транспортного средства определяет, равен ли SQNO нулю (SQNO=0). Процесс переходит к этапу S108, когда SQNO равен нулю. Процесс переходит к этапу S110, когда SQNO не равен нулю.
[0030] На этапе S108 контроллер 18 транспортного средства определяет, больше ли dV, чем нуль (dV>0). Процесс переходит к этапу S109, когда dV больше нуля. Процесс возвращается к этапу S102, когда dV не больше нуля. Определение того, что dV больше нуля, на этапе S108 указывает на то, что напряжение принимающей электрическую мощность катушки 11 увеличивается. Другими словами, изменение в напряжении (dV) больше нуля указывает на то, что принимающая электрическую мощность катушка 11 становится близкой к передающей электрическую мощность катушке 31, как показано на фиг. 2(b) и указано посредством области B на фиг. 3. Таким образом, на этапе S109, контроллер 18 транспортного средства распознает, что процесс находится на непосредственно предшествующей стадии для сообщения водителю информации, с тем, чтобы устанавливать SQNO равным единице.
[0031] На этапе S110 контроллер 18 транспортного средства определяет, равен ли SQNO единице (SQNO=1). Процесс переходит к этапу S111, когда SQNO равен единице. Процесс переходит к этапу S114, когда SQNO не равен единице.
[0032] На этапе S111 контроллер 18 транспортного средства определяет, меньше ли dV, чем нуль (dV<0). Процесс переходит к этапу S112, когда dV меньше нуля. Процесс возвращается к этапу S102, когда dV не меньше нуля. Определение того, что dV меньше нуля, на этапе S111 указывает на то, что изменение в напряжении принимающей электрическую мощность катушки 11 сдвигается с направления увеличения на направление уменьшения. Другими словами, изменение в напряжении (dV) меньше нуля на этапе S111 указывает на то, что принимающая электрическую мощность катушка 11 становится ближе к передающей электрическую мощность катушке 31, как показано на фиг. 2(c) и указано областью C на фиг. 3. Контроллер 18 транспортного средства затем устанавливает SQNO равным двум на этапе S112.
[0033] На этапе S113, поскольку SQNO установлен равным двум, контроллер 18 транспортного средства начинает информировать водителя о первом уведомлении. Первым уведомлением является рекомендация водителю замедлять транспортное средство, например. Более конкретно, контроллер 18 транспортного средства инструктирует блоку 16 отображения отображать уведомление "Пожалуйста, начните замедляться, чтобы совместить катушки друг с другом" с тем, чтобы рекомендовать водителю замедлять транспортное средство. Соответственно, водитель может осознавать момент применения тормозов.
[0034] На этапе S114 контроллер 18 транспортного средства определяет, равен ли SQNO двум (SQNO=2). Процесс переходит к этапу S115, когда SQNO равен двум. Процесс переходит к этапу S122, когда SQNO не равен двум.
[0035] На этапе S115 контроллер 18 транспортного средства определяет, равно ли REV единице (REV=1). Процесс переходит к этапу S116, когда REV равно единице. Процесс переходит к этапу S119, когда REV не равно единице. Случай, когда процесс переходит к этапу S119, описывается первым, а случай, когда процесс переходит к этапу S116, описывается далее.
[0036] На этапе S119 контроллер 18 транспортного средства определяет, больше ли dV, чем нуль (dV>0). Процесс переходит к этапу S120, когда dV больше нуля. Процесс возвращается к этапу S102, когда dV не больше нуля. Определение того, что dV больше нуля, на этапе S119 указывает на то, что изменение в напряжении принимающей электрическую мощность катушки 11 сдвигается с направления уменьшения на направление увеличения. Другими словами, изменение в напряжении (dV) больше нуля на этапе S119 указывает на то, что принимающая электрическую мощность катушка 11 становится ближе к передающей электрическую мощность катушке 31, как показано на фиг. 2(d) и указано посредством области D на фиг. 3. Контроллер 18 транспортного средства затем устанавливает SQNO равным трем на этапе S120.
[0037] На этапе S123, поскольку SQNO установлен равным трем, контроллер 18 транспортного средства начинает информировать водителя о втором уведомлении. Второе уведомление предназначено для того, чтобы рекомендовать водителю применять тормоза более интенсивно, чем замедление в первом уведомлении, например. Более конкретно, контроллер 18 транспортного средства инструктирует блоку 16 отображения отображать уведомление "Пожалуйста, интенсивно замедлитесь, чтобы совместить катушки друг с другом" с тем, чтобы рекомендовать водителю замедлять транспортное средство. Соответственно, водитель может осознавать момент применения тормозов.
[0038] Причина для определения изменения в направлении движения транспортного средства 10 на этапе 103 описывается подробно. Водитель часто изменяет направление движения транспортного средства при парковке, поворачивая рулевое колесо, в то же время задействуя рычаг переключения передач. В таком случае позиционное соотношение, показанное на фиг. 2(c), может изменяться в позиционное соотношение, показанное на фиг. 2(b). Другими словами, транспортное средство 10 может двигаться в направлении, в котором принимающая электрическую мощность катушка 11 покидает передающую электрическую мощность катушку 31. Изменение в напряжении принимающей электрическую мощность катушке 11, таким образом, сдвигается с направления уменьшения на направление увеличения. Однако контроллер 18 транспортного средства должен ограничивать информирование водителя вторым уведомлением, поскольку принимающая электрическую мощность катушка 11 отделяется от передающей электрическую мощность катушки 31. Уведомление может быть прекращено, так что изменение в напряжении принимающей электрическую мощность катушки 11, когда направление движения изменяется, сбрасывается. Когда направление движения изменяется снова, после того как напряжение принимающей электрическую мощность катушки 11 сбрасывается, контроллер 18 транспортного средства начинает управление информированием водителя следующим уведомлением на основе изменения в напряжении. Это является причиной того, что контроллер 18 транспортного средства определяет, изменяется ли направление движения, на этапе S103.
[0039] Последующее является случаем, в котором контроллер 18 транспортного средства определяет, что направление движения транспортного средства 10 изменилось, и процесс переходит к этапу S125. На этапе S125 контроллер 18 транспортного средства определяет, равен ли SQNO единице (SQNO=1). Процесс переходит к этапу S126, когда SQNO равен единице. Процесс переходит к этапу S127, когда SQNO не равен единице.
[0040] На этапе S126 контроллер 18 транспортного средства устанавливает SQNO равным нулю. Изменение в напряжении принимающей электрическую мощность катушки 11, таким образом, сбрасывается.
[0041] На этапе S127 контроллер 18 транспортного средства определяет, равен ли SQNO двум или трем (SQNO=2 или 3). Процесс переходит к этапу S128, когда SQNO равен двум или трем. Процесс переходит к этапу S104, когда SQNO не равен двум или трем, а равен нулю.
[0042] На этапе S128 контроллер 18 транспортного средства определяет, равно ли REV единице (REV=1). Процесс переходит к этапу S129, когда REV равно единице, и контроллер 18 транспортного средства устанавливает REV равным нулю. Процесс переходит к этапу S130, когда REV равно единице, и контроллер 18 транспортного средства устанавливает REV равным единице.
[0043] Последующее описание представляет случай, в котором процесс переходит к этапу S116 с этапа S115. На этапе S116 контроллер 18 транспортного средства определяет, меньше ли dV, чем нуль (dV<0). Процесс переходит к этапу S117, когда dV меньше нуля. Процесс возвращается к этапу S102, когда dV не меньше нуля.
[0044] На этапе S117 контроллер 18 транспортного средства устанавливает SQNO равным нулю. На этапе S118 контроллер 18 транспортного средства устанавливает REV равным нулю. Изменение в напряжении принимающей электрическую мощность катушки 11, таким образом, сбрасывается.
[0045] На этапе S122 контроллер 18 транспортного средства определяет, равно ли REV единице (REV=1). Процесс переходит к этапу S123, когда REV равно единице. Процесс переходит к этапу S131, когда REV не равно единице.
[0046] На этапе S123 контроллер 18 транспортного средства определяет, больше ли dV, чем нуль (dV>0). Процесс переходит к этапу S124, когда dV больше нуля. Процесс возвращается к этапу S102, когда dV не больше нуля.
[0047] На этапе S124 контроллер 18 транспортного средства устанавливает SQNO равным двум. Изменение в напряжении принимающей электрическую мощность катушки 11, таким образом, сбрасывается.
[0048] На этапе S131 контроллер 18 транспортного средства определяет, больше ли V(t) чем Vth (V(t)>Vth). Vth - это пороговое значение для определения того, находится ли транспортное средство 10 в предварительно определенной позиции, а именно, находится ли принимающая электрическую мощность катушка 11 непосредственно напротив передающей электрическую мощность катушки 31. Процесс переходит к этапу S132, когда V(t) больше Vth. Процесс возвращается к этапу S102, когда V(t) не больше Vth.
[0049] На этапе S132 контроллер 18 транспортного средства инструктирует блоку 16 отображения указывать, что водитель должен остановить транспортное средство 10. Водитель может немедленно останавливать транспортное средство 10, поскольку водитель осознал, что принимающая электрическую мощность катушка 11 становится ближе к передающей электрическую мощность катушке 31, благодаря первому уведомлению и второму уведомлению, и начал замедлять транспортное средство 10.
[0050] Как описано выше, устройство помощи при парковке согласно первому варианту осуществления определяет, приближается ли принимающая электрическую мощность катушка 11 к передающей электрическую мощность катушке 31, в зависимости от изменения в напряжении принимающей электрическую мощность катушки 11, и информирует водителя уведомлением на основе результата определения. В частности, устройство помощи при парковке информирует водителя первым уведомлением, когда изменение в напряжении принимающей электрическую мощность катушки 11 сдвигается с направления увеличения на направление уменьшения, так, чтобы рекомендовать водителю замедлять транспортное средство. Затем, устройство помощи при парковке информирует водителя вторым уведомлением, когда изменение в напряжении принимающей электрическую мощность катушки 11 сдвигается с направления уменьшения на направление увеличения, так, чтобы рекомендовать водителю дополнительно замедлять транспортное средство. Соответственно, водитель может легко распознавать момент времени торможения, с тем, чтобы предотвращать переезд или недостаточное приближение при позиционировании между принимающей электрическую мощность катушкой 11 и передающей электрическую мощность катушкой 31.
[0051] Устройство помощи при парковке согласно первому варианту осуществления сбрасывает изменение в напряжении принимающей электрическую мощность катушки 11 согласно информации о позиции рычага переключения передач, с тем, чтобы информировать водителя о соответствующем моменте времени замедления при парковке, в то время как водитель изменяет направление движения транспортного средства.
[0052] Хотя первый вариант осуществления представил в качестве примера первое уведомление и второе уведомление, отображаемые в блоке 16 отображения, контроллер 18 транспортного средства может информировать водителя об этих уведомлениях через голосовые инструкции. Хотя первый вариант осуществления представил в качестве примера первое уведомление для рекомендации водителю применять тормоза слегка и второе уведомление для рекомендации водителю применять тормоза интенсивно, соответствующие уведомления не ограничиваются этим, и степени замедления, рекомендуемые посредством первого уведомления и второго уведомления, могут быть одинаковыми. Первое уведомление может быть использовано для подготовки водителя для замедления, а второе уведомление может быть использовано для рекомендации водителю применять тормоза. Первое уведомление может быть использовано для рекомендации водителю замедлять транспортное средство до первой скорости, а второе уведомление может быть использовано для рекомендации водителю замедлять транспортное средство до второй скорости, отличной от первой скорости. Когда транспортное средство имеет режим автономного вождения, первое уведомление может быть использовано для подготовки водителя для замедления, а второе уведомление может быть использовано для автоматического замедления, в то же время рекомендуя водителю применять тормоза.
[0053] Настоящий вариант осуществления иллюстрирует случай парковки задним ходом, но может также быть применим к парковке передним ходом или параллельной парковке.
[0054] [Второй вариант осуществления]
Второй вариант осуществления описывается ниже со ссылкой на фиг. 5. Второй вариант осуществления отличается от первого варианта осуществления в том, что транспортное средство согласно второму варианту осуществления включает в себя устройство 17 автономного вождения. Те же элементы, что и в первом варианте осуществления, обозначаются теми же ссылочными номерами, и их подробные объяснения не повторяются ниже.
[0055] Устройство 17 автономного вождения реализует управление автономным вождением транспортного средства на основе условий движения транспортного средства и информации о внешней стороне транспортного средства и управляет тормозами 20 и акселератором (не показан). Водитель может выбирать автономное вождение через необязательные кнопки автономного/ручного вождения, отображаемые в блоке 16 отображения. Когда выбирается кнопка автономного вождения, устройство 17 автономного вождения начинает парковку автономно.
[0056] Устройство 17 автономного вождения может включать в себя базу данных, включающую в себя карты и информацию о дорожном движении, устройства, такие как камера и радиолокационный датчик для получения внешней информации транспортного средства, и контроллер движения для управления различными типами силовых приводов согласно базе данных и информации, полученной посредством устройств.
[0057] Процесс помощи в позиционировании во время автономной парковки является практически таким же, что и процесс, описанный в первом варианте осуществления со ссылкой на блок-схемы последовательностей операций, показанные на фиг. 4-A и фиг. 4-B, но отличается в обработке этапа S113, этапа S121 и этапа S132. Различающиеся этапы описываются ниже.
[0058] На этапе S113 устройство 17 автономного вождения автономно активизирует тормоза 20 с первым усилием торможения, чтобы замедлять транспортное средство 10.
[0059] На этапе S121 устройство 17 автономного вождения автономно активизирует тормоза 20 со вторым усилием торможения, более сильным, чем первое усилие торможения, чтобы замедлять транспортное средство 10.
[0060] На этапе S132 устройство 17 автономного вождения останавливает транспортное средство 10.
[0061] Как описано выше, устройство помощи при парковке согласно второму варианту осуществления определяет, приближается ли принимающая электрическую мощность катушка 11 к передающей электрическую мощность катушке 31, в зависимости от изменения в напряжении принимающей электрическую мощность катушки 11, и автономно управляет транспортным средством на основе результата определения. В частности, устройство помощи при парковке замедляет транспортное средство 10 с первым усилием торможения, когда изменение в напряжении принимающей электрическую мощность катушки 11 сдвигается с направления увеличения на направление уменьшения. Затем, устройство помощи при парковке замедляет транспортное средство 10 со вторым усилием торможения, более сильным, чем первое усилие торможения, когда изменение в напряжении принимающей электрическую мощность катушки 11 сдвигается с направления уменьшения на направление увеличения. Соответственно, устройство помощи при парковке может легко распознавать момент времени торможения, с тем, чтобы предотвращать переезд или недостаточное приближение при позиционировании между принимающей электрическую мощность катушкой 11 и передающей электрическую мощность катушкой 31.
[0062] Устройство помощи при парковке согласно второму варианту осуществления сбрасывает изменение в напряжении принимающей электрическую мощность катушки 11 согласно информации о позиции рычага переключения передач, с тем, чтобы точно распознавать момент времени торможения при парковке, в то же время изменяя направление движения транспортного средства для избегания препятствий.
[0063] Хотя второй вариант осуществления представил в качестве примера управление, реализуемое посредством устройства 17 автономного вождения с помощью первого усилия торможения и второго усилия торможения, более сильного, чем первое усилие торможения, степени первого усилия торможения и второго усилия торможения могут быть одинаковыми. Альтернативно, устройство 17 автономного вождения может замедлять транспортное средство 10 до первой скорости без использования первого усилия торможения и замедлять транспортное средство 10 до второй скорости, меньшей, чем первая скорость, без использования второго усилия торможения.
[0064] В то время как варианты осуществления настоящего изобретения были описаны выше, должно быть понятно, что настоящее изобретение не предназначено быть ограниченным описаниями и чертежами, составляющими часть этого раскрытия предмета изобретения. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны специалистам в области техники согласно этому раскрытию.
Список номеров ссылок
[0065] 10 Транспортное средство
11 Принимающая электрическую мощность катушка
12 Датчик напряжения
17 Устройство автономного вождения
18 Контроллер транспортного средства
31 Передающая электрическую мощность катушка
Изобретение относится к устройствам помощи при парковке и совмещении принимающего электрическую мощность устройства на стороне транспортного средства с передающим электрическую мощность устройством на стороне земли. Устройство помощи при парковке для совмещения катушки транспортного средства, установленной на поверхности днища транспортного средства, с наземной катушкой, установленной на земле, измеряет напряжение катушки транспортного средства и обнаруживает изменение в измеренном напряжении. Устройство, когда изменение в измеренном напряжении сдвигается с направления увеличения на направление уменьшения, уведомляет водителя о первом торможении, а когда изменение в напряжении сдвигается с направления уменьшения на направление увеличения, уведомляет водителя о втором торможении. Техническим результатом является улучшение точности позиционирования транспортного средства. 2 н. и 2 з.п. ф-лы, 5 ил.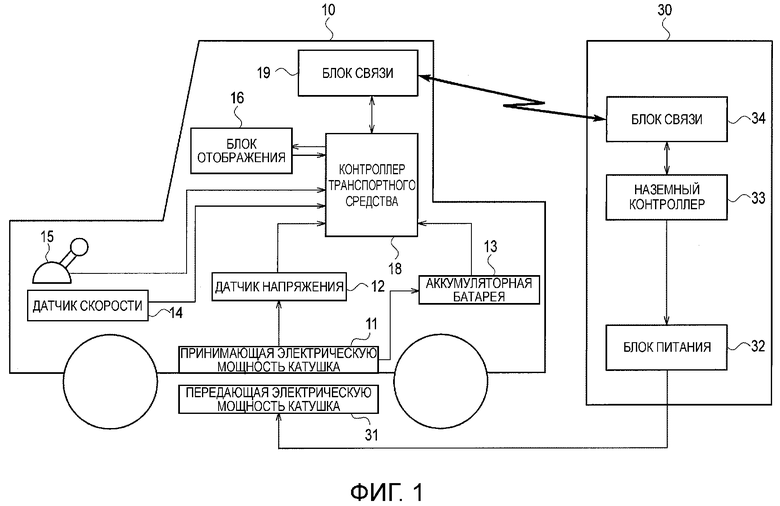
1. Устройство помощи при парковке для совмещения катушки транспортного средства, установленной на поверхности днища транспортного средства, с наземной катушкой, установленной на земле, причем упомянутое устройство помощи при парковке содержит:
датчик напряжения, сконфигурированный, чтобы измерять напряжение катушки транспортного средства;
датчик степени изменения, сконфигурированный, чтобы обнаруживать изменение в напряжении, измеренном посредством датчика напряжения;
контроллер уведомления, сконфигурированный, чтобы уведомлять водителя о первом торможении, когда изменение в напряжении, обнаруженное посредством датчика степени изменения, сдвигается с направления увеличения на направление уменьшения, и уведомлять водителя о втором торможении, когда изменение в напряжении сдвигается с направления уменьшения на направление увеличения.
2. Устройство помощи при парковке по п. 1, в котором контроллер уведомления обнаруживает позицию рычага переключения передач и сбрасывает изменение в напряжении, когда обнаруженная позиция рычага переключения передач изменяется.
3. Устройство помощи при парковке для совмещения катушки транспортного средства, установленной на поверхности днища транспортного средства, с наземной катушкой, установленной на земле, причем упомянутое устройство помощи при парковке содержит:
датчик напряжения, сконфигурированный, чтобы измерять напряжение катушки транспортного средства;
датчик степени изменения, сконфигурированный, чтобы обнаруживать изменение в напряжении, измеренном посредством датчика напряжения;
контроллер автономного вождения, сконфигурированный, чтобы реализовывать первое автономное торможение, когда изменение в напряжении, обнаруженное посредством датчика степени изменения, сдвигается с направления увеличения на направление уменьшения, и реализовывать второе автономное торможение, когда изменение в напряжении сдвигается с направления уменьшения на направление увеличения.
4. Устройство помощи при парковке по п. 3, в котором контроллер автономного вождения обнаруживает позицию рычага переключения передач и сбрасывает изменение в напряжении, когда обнаруженная позиция рычага переключения передач изменяется.
| JP 2011254633 A, 15.12.2011 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2408476C2 |

