Область техники
[0001] Настоящее изобретение относится к способу управления вождением и устройству управления вождением.
Уровень техники
[0002] Патентный документ 1 раскрывает устройство управления уведомлением, которое уведомляет водителя о возможности передачи права управления, связанного с операцией вождения, от функции автономного вождения к водителю. В этом устройстве управления уведомлением, если степень загруженности зоны, в которой планируется смена полосы движения (LC), является низкой, вероятность того, что право управления будет передано водителю, определяется как относительно низкая.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2017-133893
Сущность изобретения
Проблема, решаемая изобретением
[0004] Однако, Патентный документ 1 не принимает во внимание, что, когда степень загруженности зоны, в которой планируется смена полосы движения, является низкой, а поток движения ровный, существует вероятность того, что другое транспортное средство, приближающееся к этой зоне с высокой скоростью, внезапно появится рядом с рассматриваемым транспортным средством.
[0005] Проблема, решаемая настоящим изобретением, заключается в управлении рассматриваемым транспортным средством для автономной смены полосы движения в ситуациях, когда маловероятно, что другое транспортное средство, приближающееся сзади, внезапно въедет в зону, в которой рассматриваемое транспортное средство планирует сменить полосу движения.
Средство для решения проблемы
[0006] Способ управления вождением и устройство управления вождением в соответствии с настоящим изобретением решают проблему, описанную выше, в том, что, когда определяется, что другое транспортное средство движется в пределах заданной зоны обнаружения полосы движения, на которую рассматриваемое транспортное средство меняет полосу движения, выполняется определение делается, что можно выполнять управление сменой полосы движения, чтобы предписывать рассматриваемому транспортному средству автономно менять полосу движения.
Эффекты изобретения
[0007] Благодаря настоящему изобретению, поскольку возможность выполнения управления сменой полосы движения рассматриваемого транспортного средства определяется в соответствии с результатом обнаружения другого транспортного средства, которое движется по полосе движения, предназначенной для смены полосы движения, становится возможным управлять рассматриваемым транспортным средством, чтобы автономно менять полосу движения в ситуациях, когда маловероятно, что другое транспортное средство, приближающееся сзади, внезапно въедет в зону смены полосы движения, в которую планирует войти рассматриваемое транспортное средство.
Краткое описание чертежей
[0008] Фиг.1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства управления вождением согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 представляет собой блок-схему, иллюстрирующую процедуру способа управления вождением, осуществляемого устройством управления вождением, показанным на фиг. 1.
Фиг. 3 представляет собой схему, показывающую пример позиционного соотношения между рассматриваемым транспортным средством, движущимся по первой полосе движения, и другим транспортным средством, движущимся по второй полосе движения, в способе управления вождением, показанном на фиг. 2.
Фиг. 4 представляет собой схему, показывающую другой пример позиционного соотношения между рассматриваемым транспортным средством, движущимся по первой полосе движения, и другим транспортным средством, движущимся по второй полосе движения, в способе управления вождением, показанном на фиг. 2.
Фиг. 5 представляет собой блок-схему, показывающую другой пример процедуры способа управления вождением, показанного на фиг. 2.
Фиг. 6 представляет собой блок-схему, иллюстрирующую процедуру способа управления вождением, осуществляемую устройством управления вождением согласно второму варианту осуществления настоящего изобретения.
Фиг. 7 представляет собой блок-схему, иллюстрирующую процедуру способа управления вождением, осуществляемую устройством управления вождением согласно третьему варианту осуществления настоящего изобретения.
Фиг. 8 представляет собой блок-схему, иллюстрирующую процедуру способа управления вождением, осуществляемую устройством управления вождением согласно четвертому варианту осуществления настоящего изобретения.
Варианты осуществления для реализации изобретения
[0009] Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи.
Первый вариант осуществления
Первый вариант осуществления будет описан со ссылкой на фиг.1-4.
Фиг.1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства 1 управления вождением согласно настоящему варианту осуществления. Устройство 1 управления вождением в соответствии с настоящим вариантом осуществления также является одним из вариантов осуществления для выполнения способа управления вождением в соответствии с настоящим изобретением. Как показано на фиг. 1, устройство 1 управления вождением транспортного средства в соответствии с настоящим вариантом осуществления содержит блок 11 обнаружения других транспортных средств, устройство 12 обнаружения положения рассматриваемого транспортного средства, базу 13 данных карт, бортовые устройства 14, устройство 15 вывода, устройство 16 ввода, контроллер 17 привода и процессор 18. Эти устройства подключены, например, к CAN (локальной сети контроллеров) и другим бортовым локальным сетям (LAN) для взаимной отправки и приема информации.
[0010] Блок 11 обнаружения других транспортных средств снабжен датчиком 11а для обнаружения других транспортных средств, движущихся поблизости от рассматриваемого транспортного средства. Датчик 11а может представлять собой группу датчиков, состоящую из множества различных датчиков. Датчик 11а установлен на рассматриваемом транспортном средстве. Блок 11 обнаружения других транспортных средств использует датчик 11а для обнаружения других транспортных средств, движущихся поблизости от рассматриваемого транспортного средства. Блок 11 обнаружения других транспортных средств отправляет результаты обнаружения в процессор 18. Примеры других транспортных средств, которые блок 11 обнаружения других транспортных средств может обнаруживать с помощью датчика 11а, включают в себя движущиеся впереди транспортные средства и движущиеся сзади транспортные средства, движущиеся по той же полосе движения, что и полоса движения рассматриваемого транспортного средства, другие транспортные средства, движущиеся по полосам движения смежным с полосой движения рассматриваемого транспортного средства, и транспортные средства, движущиеся к рассматриваемому транспортному средству. Блок 11 обнаружения других транспортных средств включает в себя в качестве датчика 11а по меньшей мере одно из следующего: передняя камера, боковая камера, задняя камера, передний радар, боковой радар и задний радар. Блок 11 обнаружения других транспортных средств, таким образом, использует датчик 11а для обнаружения другого транспортного средства, движущегося по второй полосе движения, которая не является первой полосой движения, т.е. полосой движения, по которой движется рассматриваемое транспортное средство. Кроме того, датчик 11a блока 11 обнаружения других транспортных средств имеет систему связи между транспортными средствами (vehicle-to-vehicle communication) и может получать информацию о скорости и информацию о местоположении другого транспортного средства посредством использования связи между транспортными средствами с другим транспортным средством. Кроме того, блок 11 обнаружения других транспортных средств имеет систему связи между дорожной инфраструктурой и транспортным средством (road-to-vehicle communication) с системой управления дорожным движением, внешней по отношению к транспортному средству, которая включает в себя придорожные устройства, и датчик 11а может получать информацию о скорости и информацию о местоположении другого транспортного средства с использованием связи с системой управления дорожным движением, внешней по отношению к транспортному средству. Система управления дорожным движением включает японскую ИТС: Интеллектуальная транспортная система (Intelligent Transport System). Вторая полоса движения в настоящем варианте осуществления включает в себя не только смежные полосы движения, которые примыкают к первой полосе движения, по которой движется рассматриваемое транспортное средство, но также смежные к смежным полосы движения, которые примыкают к этим смежным полосам движения. Кроме того, диапазон второй полосы движения не ограничивается таким образом и включает в себя полосу движения, смежную с первой полосой движения и в том же направлении движения. Блок 11 обнаружения других транспортных средств задает диапазон полос движения, в которых следует обнаруживать другие транспортные средства, в соответствии с количеством полос движения на дороге, по которой движется рассматриваемое транспортное средство, количеством полос, влияющих на движение рассматриваемого транспортного средства, и количеством полос, по которым может двигаться транспортное средство.
[0011] Устройство 12 обнаружения положения рассматриваемого транспортного средства состоит из блока GPS, гироскопического датчика, датчика скорости транспортного средства и т.п. Устройство 12 обнаружения положения рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые от множества спутников связи, с использованием блока GPS и периодически получает информацию о положении целевого транспортного средства (рассматриваемого транспортного средства). Устройство 12 обнаружения положения рассматриваемого транспортного средства обнаруживает текущее местоположение целевого транспортного средства на основе полученной информации о положении целевого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Информация о положении целевого транспортного средства, обнаруженная устройством 12 обнаружения положения рассматриваемого транспортного средства, выводится в процессор 18 через заданные интервалы времени.
[0012] База 13 данных карт представляет собой память для хранения высокоточной трехмерной картографической информации, которая включает в себя информацию о местоположении, касающуюся различных объектов и конкретных точек, и которая сконфигурирована так, чтобы к ней можно было получить доступ из процессора 18. База 13 данных карт хранит высокоточную цифровую картографическую информацию (карта высокой точности, динамическая карта). В настоящем примере сохраненная высокоточная картографическая информация представляет собой трехмерную картографическую информацию, которая включает в себя информацию о высоте дорожного просвета, обнаруженную с помощью транспортного средства для сбора данных, движущегося по реальным дорогам. Высокоточная картографическая информация включает в себя идентифицирующую информацию о многочисленных полосах движения на дорогах. Картографическая информация базы 13 данных карт включает в себя трехмерную информацию о местоположении, относящуюся к автомагистралям и/или дорогам с кривыми полосами движения, а также размер кривых (например, кривизну или радиус кривизны), местоположения точек слияния, точек ответвления и места сокращения полосы движения. Высокоточная картографическая информация также включает информацию, касающуюся объектов, таких как зоны обслуживания и парковки.
[0013] Бортовые устройства 14 установлены в транспортном средстве и функционируют в ответ на действия, выполняемые пассажиром. К бортовым устройствам 14 относится рулевое колесо 14а. Кроме того, примеры других бортовых устройств 14 включают в себя педаль акселератора, педаль тормоза, навигационное устройство, индикатор указателя поворота, стеклоочистители, фары, звуковой сигнал и другие специальные переключатели. Когда пассажир управляет бортовыми устройствами 14, информация выводится на процессор 18. Процессор 18 выводит команды управления на основе рабочей информации в контроллер 17 привода. Контроллер 17 привода приводит в действие приводное устройство транспортного средства в соответствии с командой управления. Пассажир, управляющий бортовыми устройствами 14, в первую очередь является водителем, но бортовыми устройствами 14 также может управлять пассажир, не являющийся водителем.
[0014] Устройство 15 вывода включает в себя дисплей, предусмотренный в навигационном устройстве, дисплей, встроенный в зеркало заднего вида, дисплей, встроенный в измерительный блок, проекционный дисплей, проецируемый на лобовое стекло, громкоговоритель, предусмотренный в аудиоустройстве, устройство сиденья, в которое встроено вибрирующее тело. Устройство 15 вывода уведомляет водителя и других пассажиров об информации о смене полосы движения и информации о представлении, описанной ниже, в соответствии с управлением процессора 18.
[0015] Устройство 16 ввода представляет собой, например, дисплей с сенсорной панелью, на котором отображается кнопочный переключатель, с помощью которого можно вводить ручное управление пассажиром, или микрофон, с помощью которого можно вводить голос водителя. Дисплей с сенсорной панелью функционирует как устройство 15 вывода, а также как устройство 16 ввода. Кроме того, пассажир, который вводит инструкции в устройство 16 ввода, в первую очередь является водителем, но пассажир, отличный от водителя, может вводить инструкции в устройство 16 ввода.
[0016] Контроллер 17 привода управляет работой рассматриваемого транспортного средства. Например, контроллер 17 привода управляет операцией торможения, а также работой приводного механизма для регулировки ускорения/замедления и скорости транспортного средства (включая работу двигателя внутреннего сгорания в транспортном средстве с двигателем и работу ходового мотора в системе электрического транспортного средства, включая распределение крутящего момента между двигателем внутреннего сгорания и ходовым мотором в гибридном транспортном средстве) с использованием функции автономного управления скоростью. Кроме того, контроллер 17 привода управляет работой исполнительного механизма рулевого управления, используя функцию автономного рулевого управления, тем самым выполняя управление рулевым управлением рассматриваемого транспортного средства. Например, контроллер 17 привода обнаруживает маркеры полосы движения, по которой движется рассматриваемое транспортное средство, и управляет положением движения (боковым положением) рассматриваемого транспортного средства в направлении ширины, так что рассматриваемое транспортное средство движется по центру полосы движения. Кроме того, контроллер 17 привода управляет изменениями направления движения, обгоном транспортного средства, движущегося впереди рассматриваемого транспортного средства, и т.п. Кроме того, контроллер 17 привода выполняет управление движением для поворота влево или вправо на перекрестке и т.п. Кроме того, другие известные способы могут использоваться в качестве способа управления движением, осуществляемого контроллером 17 привода.
[0017] Процессор 18 включает в себя ROM (Read-Only Memory, постоянное запоминающее устройство) для хранения программы для управления работой рассматриваемого транспортного средства, CPU (Central Processing Unit, центральный процессор), который выполняет программу, хранящуюся в этом ROM, и RAM (Random-Access Memory, оперативное запоминающее устройство), которая функционирует как доступное запоминающее устройство. Что касается операционной схемы, то MPU (Micro Processing Unit, микропроцессор), DSP (Digital Signal Processor, процессор цифровых сигналов), ASIC (Application-Specific Integrated Circuit, специализированная интегральная схема), FPGA (Field Programmable Gate Array, программируемая пользователем вентильная матрица) и т.д. могут использоваться вместо центрального процессора или в дополнение к нему.
[0018] Процессор 18 получает информацию о движении, относящуюся к состоянию движения рассматриваемого транспортного средства. Например, процессор 18 получает в качестве информации о движении информацию об изображении, внешнем по отношению к транспортному средству, снятом передней камерой, а также задней камерой, и результаты обнаружения переднего радара, заднего радара и боковых радаров. Кроме того, процессор 18 также получает в качестве информации о движении информацию о скорости транспортного средства в отношении рассматриваемого транспортного средства, обнаруженную датчиком скорости транспортного средства, и информацию об изображении лица водителя, снятом бортовой камерой.
[0019] Кроме того, процессор 18 получает в качестве информации о движении от устройства 12 обнаружения положения рассматриваемого транспортного средства информацию о текущем местоположении рассматриваемого транспортного средства. Кроме того, процессор 18 получает в качестве информации о движении из базы 13 данных карт информацию о местоположении, такую как кривые дороги и размер кривых (например, кривизну или радиус кривизны), точки слияния, точки ответвления, пункты взимания платы, места сокращения полос движения, зоны обслуживания (SA)/зоны парковки (PA) и т.п. Кроме того, процессор 18 получает в качестве информации о движении от бортовых устройств 14 информацию об управлении пассажиром бортовыми устройствами 14. Кроме того, процессор 18 получает результаты обнаружения относительно других транспортных средств, находящихся поблизости от рассматриваемого транспортного средства, от блока 11 обнаружения других транспортных средств.
[0020] Кроме того, процессор 18 выполняет программу, хранящуюся в ROM, с использованием CPU, таким образом, автономно управляя скоростью транспортного средства и рулевым управлением рассматриваемого транспортного средства, используя функцию автономного управления движением. Процессор 18 передает команды управления на основе функции автономного управления движением в контроллер 17 привода.
[0021] Процессор 18 может устанавливать автономный режим вождения в соответствии с уровнем помощи при вождении и помогать в движении рассматриваемого транспортного средства в соответствии с установленным режимом вождения. Уровень помощи при вождении указывает степень, в которой устройство 1 управления вождением помогает вождению транспортного средства посредством функции автономного управления движением. Вклад водителя в управление транспортным средством уменьшается по мере увеличения уровня помощи при вождении. В частности, уровень помощи при вождении можно установить с помощью определения и т.д. на основе SAE J3016 Общества автомобильных инженеров США (SAE). На уровне 0 помощи при вождении все операции по вождению рассматриваемого транспортного средства выполняются водителем вручную. На уровне 1 помощи при вождении, хотя операции по вождению рассматриваемого транспортного средства в основном выполняются посредством ручных операций водителя, контроллер 17 привода надлежащим образом поддерживает ручные операции водителя с использованием любой из функций, таких как автоматическое торможение, следование, удержание полосы движения и т.д. На уровне 2 помощи при вождении, несмотря на то, что операции по вождению рассматриваемого транспортного средства в основном выполняются с использованием ручных операций водителя, при определенных условиях контроллер 17 привода может комбинировать множество функций, среди которых функция автоматического торможения, функция следования, функцию удержания на полосе и т.д., тем самым выполняя операцию помощи при вождении. На уровне 3 помощи при вождении контроллер 17 привода выполняет все задачи вождения, но водитель должен возобновить управление и быть готовым к вождению вручную по запросу устройства 1 управления вождением. На уровне 4 помощи при вождении при определенных условиях ручное вождение водителем не требуется, и процессор 18 может управлять контроллером 17 привода для выполнения всех задач вождения и мониторинга окружающих условий рассматриваемого транспортного средства. На уровне 5 помощи при вождении процессор 18 может управлять контроллером 17 привода для выполнения всех задач вождения при любых условиях. Классификация этих уровней помощи при вождении не ограничивается схемой классификации в соответствии с определениями Общества автомобильных инженеров США и может быть определена на основе ISO/TC204 Международной организации по стандартизации (ISO). Кроме того, классификация уровней помощи при вождении может определяться другими критериями.
[0022] Режимы вождения с уровнями помощи при вождении от 0 до 1 будут называться «ручными режимами вождения». Режимы вождения с уровнями помощи при вождении от 2 до 5 будут называться «автономным режимом вождения». Процессор 18 может переключаться между ручным режимом вождения и автономным режимом вождения в соответствии с инструкциями водителя или условиями движения, окружающими рассматриваемое транспортное средство.
[0023] Кроме того, хотя и не ограничено особым образом, устройство 1 управления вождением в соответствии с настоящим вариантом осуществления управляет контроллером 17 привода для выполнения функции автономного вождения, которая может переключать автономный режим вождения между режимом с активным участием (с ручным управлением) и режимом без активного участия (без ручного управления). Из функций автономного вождения переключение режима с активным участием и режима без активного участия наиболее эффективно используется функцией автономного рулевого управления. Функция автономного рулевого управления используется для выполнения управления рулевым управлением рассматриваемого транспортного средства путем управления работой исполнительного механизма рулевого управления, тем самым помогая водителю управлять рулевым колесом. Эта функция автономного рулевого управления включает в себя, например, функцию центрирования на полосе движения, которая управляет рулевым управлением, чтобы поддерживать транспортное средство приблизительно в центре полосы движения, функцию удержания полосы движения для управления боковым положением транспортного средства, чтобы двигаться в той же полосе движения, функцию помощи при смене полосы движения для перехода с полосы движения на другую полосу движения, функция помощи при обгоне для движения вперед путем обгона другого транспортного средства (в соседней полосе движения), которое движется впереди, и функцию помощь при движении по маршруту для автономной смены полос движения для следования по маршруту к месту назначения. Хотя это и не ограничивается этим, устройство 1 управления вождением по настоящему варианту осуществления управляет контроллером 17 привода для выполнения функции автономного рулевого управления, описанной выше, в режиме без активного участия, когда выполняется одно или все из следующих условий. То есть, когда выполняются некоторые или все из следующих условий, устройство 1 управления движением управляет контроллером 17 привода для выполнения функции автономного рулевого управления в режиме без активного участия второго режима, то есть, даже если руки водителя убираются с руля.
[0024] В качестве одного примера ниже показаны условия для перехода в режим без активного участия в функции центрирования на полосе движения.
- Рассматриваемое транспортное средство движется по автомобильной дороге.
- Транспортное средство движется по дороге, конструктивно отделенной от встречной полосы движения.
- Транспортное средство движется по дороге, для которой имеется высокоточная карта и для которой эффективно использование высокоточной картографической информации.
- Транспортное средство движется со скоростью, меньшей или равной разрешенной скорости.
- Транспортное средство движется по дороге, ограничение скорости которой больше или равно заданной скорости (например, 60 км/ч).
- Глобальная навигационная спутниковая система: Сигналы GNSS эффективны.
- Камера наблюдения за водителем распознает водителя и обнаруживает, что водитель смотрит вперед.
- Водитель обращен вперед.
- Было подтверждено, что поблизости от текущего местоположения (например, в пределах 800 м впереди) нет пунктов взимания платы, съездов с автомагистралей, точек слияния, перекрестков или точек сокращения полосы движения.
- Вблизи текущего местоположения (например, в пределах 500 м впереди) отсутствуют крутые повороты 100 R или менее.
- Педаль акселератора не нажата.
- В работе радара, сонара, камеры наблюдения за периметром транспортного средства и камеры наблюдения за водителем не обнаружено никаких отклонений.
[0025] Если любое из вышеописанных условий не удовлетворяется во время выполнения функции центрирования на полосе движения с использованием режима без активного участия, выполняется переключение на функцию центрирования на полосе движения с использованием режима с активным участием. Условия, при которых разрешается режим без активного участия, который является вторым режимом, могут быть определены для каждой функции автономного вождения (функция удержания в полосе движения, функция помощи при смене полосы движения, функция помощи при обгоне или функция помощи при движении по маршруту). Разумеется, обязательным условием является выполнение условий для активации функций автономного вождения.
[0026] Далее процедура способа управления вождением, выполняемая процессором 18 устройства 1 управления вождением, будет описана со ссылкой на фиг.2-4. На фиг.3 и 4 показано рассматриваемое транспортное средство 10, движущееся по первой полосе 31 движения, другое транспортное средство 21, движущееся по второй полосе 32 движения, смежной с первой полосой 31 движения, и движущееся сзади другое транспортное средство 22, которое представляет собой другое транспортное средство, движущееся по второй полосе движения 32 движения позади другого транспортного средства 21. Скорость рассматриваемого транспортного средства 10 задается как скорость V0 транспортного средства, скорость транспортного средства для другого транспортного средства 21 задается как скорость V1 транспортного средства, а скорость движущегося сзади другого транспортного средства 22 задается как скорость V2 транспортного средства. Кроме того, в примерах на фиг. 3 и 4 предполагается, что относительное положение другого транспортного средства 21 по отношению к рассматриваемому транспортному средству 10 находится в пределах заданной зоны Z1 обнаружения. Предписанная зона Z1 обнаружения представляет собой область, в которой процессор 18 устройства 1 управления вождением может отслеживать поведение другого транспортного средства 21 с помощью оптического датчика, такого как камера или радар, блока 11 обнаружения других транспортных средств. Диапазон зоны Z1 обнаружения может быть изменен в зависимости от производительности и т.д. рассматриваемого транспортного средства 10 и может быть установлен экспериментально. Кроме того, на фиг.3 и 4 показана запланированная зона Z2 смены полосы движения, которая представляет собой зону смены полосы движения, в которую планирует въехать рассматриваемое транспортное средство 10. В частности, запланированная зона Z2 смены полосы движения представляет собой положение во второй полосе 32 движения, установленное относительно близко к передней части рассматриваемого транспортного средства 10. С другой стороны, предполагается, что движущееся сзади другое транспортное средство 22 движется позади рассматриваемого транспортного средства 10 и другого транспортного средства 21 и на таком расстоянии от рассматриваемого транспортного средства 10, что его не может обнаружить блок 11 обнаружения других транспортных средств рассматриваемого транспортного средства 10.
[0027] Кроме того, в последующем описании управление сменой полосы движения управляет автономным движением рассматриваемого транспортного средства 10, движущегося по первой полосе 31 движения на вторую полосу 32 движения, которая отличается от первой полосы 31 движения, то есть управление для управления рассматриваемым транспортным средством 10 для смены полосы движения в автономном режиме вождения. Кроме того, процессор 18 устройства 1 управления вождением управляет различными устройствами привода, чтобы выполнять процессы управления и выполнять определения, описанные ниже.
[0028] Как показано на фиг.2, на этапе S1 процессор 18, предусмотренный в устройстве 1 управления вождением, определяет, имеется ли запрос на смену полосы движения. Процессор 18 определяет, имеется ли запрос на смену полосы движения, на основе, например, наличия/отсутствия действия водителя над рычагом указателя поворота. Кроме того, процессор 18 может определить, имеется ли запрос на смену полосы движения, на основе того, касается ли палец водителя переключателя на экране, отображаемом на дисплее. Кроме того, процессор 18 может определить, имеется ли запрос на смену полосы движения, на основе маршрута движения до пункта назначения, рассчитанного заранее. Кроме того, если необходимо объехать предписанную область на маршруте движения, может быть определено, что имеется запрос на смену полосы движения. Предписанная область, которую следует избегать, - это одна или несколько из следующих областей: строительная зона, зона препятствий, зона припаркованных транспортных средств, зона, запрещенная для въезда, и зона аварии. Если нет запроса на смену полосы, управление прекращается.
[0029] Если на этапе S1 определено, что была запрошена смена полосы движения, управление переходит к этапу S2. На этапе S2 процессор 18 определяет, используя различные камеры или радары, предусмотренные в рассматриваемом транспортном средстве 10, есть ли необходимое пространство во второй полосе 32 движения для рассматриваемого транспортного средства 10 для выполнения смены полосы движения. Например, если ширина дороги второй полосы 32 движения была уменьшена из-за строительства и т.д., определяется, что у рассматриваемого транспортного средства 10 нет места для выполнения смены полосы движения. Кроме того, наличие большого количества других транспортных средств, движущихся по второй полосе 32 движения с недостаточным пространством для рассматриваемого транспортного средства 10, также считается случаем, когда у рассматриваемого транспортного средства 10 нет места для выполнения смены полосы движения.
[0030] Когда определено, что во второй полосе 32 движения нет места, необходимого для рассматриваемого транспортного средства 10 для выполнения смены полосы движения, процессор 18 завершает управление. То есть, когда определено, что во второй полосе 32 движения нет места для рассматриваемого транспортного средства 10 для выполнения смены полосы движения, процессор 18 выводит команду, запрещающую выполнение управления сменой полосы движения, на контроллер 17 привода устройства 1 управления вождением. Если на этапе S1 определено, что запрошена смена полосы движения, управление процессом может перейти к этапу S3, дополнительно описанному ниже, без прохождения этапа S2, как показано пунктирной линией на рисунке 2. То есть, если из информации в базе 13 данных карт или информации о дорожном движении и т.д., полученной заранее, ясно, что на второй полосе 32 движения имеется необходимое пространство для смены полосы движения, процесс этапа S2 может быть пропущен.
[0031] Если на этапе S2 определено, что во второй полосе 32 движения имеется необходимое пространство для рассматриваемого транспортного средства 10 для выполнения смены полосы движения, управление переходит к этапу S3, и процессор 18 определяет, обнаружил ли блок 11 обнаружения других транспортных средств присутствие другого транспортного средства 21, движущегося по второй полосе 32 движения и в пределах зоны Z1 обнаружения. То есть процессор 18 определяет на основе результата обнаружения, полученного от датчика 11a блока 11 обнаружения других транспортных средств, было ли обнаружено другое транспортное средство 21, движущееся в пределах зоны Z1 обнаружения второй полосы 32 движения. В частности, даже если датчик 11а блока 11 обнаружения других транспортных средств обнаруживает присутствие другого транспортного средства посредством связи между транспортными средствами или связи между дорожной инфраструктурой и транспортным средством, процессор 18 определяет, что «другое транспортное средство 21 было обнаружено» только тогда, когда это другое транспортное средство 21 обнаружено в пределах зоны Z1 обнаружения второй полосы 32 движения. Другое транспортное средство 21 может двигаться позади рассматриваемого транспортного средства 10, как показано на фиг. 3, или двигаться впереди рассматриваемого транспортного средства 10, как показано на фиг. 4. Хотя это не показано, другое транспортное средство может двигаться с одной стороны рассматриваемого транспортного средства 10.
[0032] На этапе S3, если определено, что другое транспортное средство 21, движущееся в пределах зоны Z1 обнаружения во второй полосе 32 движения, не было обнаружено, управление переходит к этапу S21, и процессор 18 определяет, что управление сменой полосы движения не может быть выполнено. Затем управление переходит к этапу S22, и процессор 18 выдает уведомление через устройство 15 вывода о том, что режим вождения во время смены полосы движения будет автоматически установлен на ручной режим вождения. То есть, на основе определения на этапе S22 (информация о том, что «управление сменой полосы движения не может быть выполнено») процессор 18 выводит информацию о том, может ли быть выполнено управление сменой полосы движения, на устройство 15 вывода. Таким образом, если рассматриваемое транспортное средство 10 движется в автономном режиме вождения, устройство 15 вывода уведомляет пассажира, например водителя, о том, что режим вождения будет автоматически переключен с автономного режима вождения на ручной режим вождения. Кроме того, если рассматриваемое транспортное средство 10 движется в ручном режиме вождения, устройство 15 вывода уведомляет пассажира, например водителя, о том, что ручной режим вождения будет поддерживаться во время смены полосы движения. Уведомление устройства 15 вывода осуществляется с помощью отображения текста на экране дисплея или голосового указания, издаваемого громкоговорителем.
[0033] Затем управление переходит к этапу S8, и процессор 18 устанавливает режим вождения в ручной режим вождения до момента смены полосы движения рассматриваемого транспортного средства 10. То есть, если рассматриваемое транспортное средство 10 движется в автономном режиме вождения, процессор 18 переключает режим вождения с автономного режима вождения на ручной режим вождения. Кроме того, если рассматриваемое транспортное средство 10 движется в ручном режиме вождения, процессор 18 сохраняет режим вождения в ручном режиме вождения. Таким образом, смена полосы движения рассматриваемого транспортного средства 10 выполняется с использованием ручных операций управления водителем. То есть, если определено, что блок 11 обнаружения других транспортных средств не обнаружил другого транспортного средства 21, движущегося в пределах зоны Z1 обнаружения во второй полосе 32, процессор 18 выводит команду на контроллер 17 привода устройства 1 управления вождением, чтобы запретить выполнение управления для смены полосы движения в автономном режиме вождения.
[0034] Если рассматриваемое транспортное средство 10 движется в ручном режиме вождения, и определено, что другое транспортное средство 21, движущееся в пределах зоны Z1 обнаружения второй полосы 32, не обнаружено, управление может перейти к этапу S8, минуя этап S22, как показано пунктирной линией на рисунке 2. То есть, если рассматриваемое транспортное средство 10 движется в ручном режиме вождения, процессор 18 может поддерживать режим вождения в ручном режиме вождения во время выполнения смены полосы движения, не уведомляя пассажира о настройке режима вождения в момент времени смены полосы движения. В этом случае также, на основе определения на этапе S21, процессор 18 выводит на контроллер 17 привода информацию о том, может ли быть выполнено управление сменой полосы движения (здесь команда, которая включает в себя информацию о том, что «управление сменой полосы движения не может быть выполнено»). На основе этой команды контроллер 17 привода не выполняет управление сменой полосы движения, и режим вождения рассматриваемого транспортного средства 10 сохраняется в ручном режиме вождения.
[0035] Если, с другой стороны, на этапе S3 блок 11 обнаружения других транспортных средств обнаружил другое транспортное средство 21, движущееся по второй полосе 32 движения в пределах зоны Z1 обнаружения, то есть если он определил, что другое транспортное средство 21 обнаружено в пределах зоны Z1 обнаружения, управление переходит к этапу S4. На этапе S4 процессор 18 определяет, что управление сменой полосы движения может быть выполнено. В частности, даже если скорость V2 движущегося сзади другого транспортного средства 22, показанного на фиг. 3 и 4, больше, чем скорость V1 другого транспортного средства 21, прогнозируется, что движущееся сзади другое транспортное средство 22 будет замедляться при приближении к другому транспортному средству 21. Таким образом, скорость V2 транспортного средства для движущегося сзади другого транспортного средства 22 прогнозируется приблизительно равной скорости V1 транспортного средства для другого транспортного средства 21. В результате процессор 18 определяет, что присутствие другого транспортного средства 21 обнаружено на второй полосе 32 движения, и, таким образом, определяет маловероятность того, что движущееся сзади другое транспортное средство 22 приблизится к запланированной зоне Z2 смены полосы движения рассматриваемого транспортного средства 10 сзади со скоростью транспортного средства, превышающей скорость другого транспортного средства 21. То есть процессор 18 выбирает ситуацию, в которой маловероятно, что движущееся сзади другое транспортное средство 22 приблизится к рассматриваемому транспортному средству 10 сзади на второй полосе 32 движения пункта назначения смены полосы движения, и определяет, что управление сменой полосы движения может быть выполнено в ситуациях, когда определено, что маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения рассматриваемого транспортного средства 10. Здесь, что «движущееся сзади другое транспортное средство 22 приблизится к рассматриваемому транспортному средству 10 на высокой скорости сзади на второй полосе 32 движения пункта назначения смены полосы движения» означает, что скорость V2 транспортного средства для движущегося сзади другого транспортного средства 22, приближающегося сзади, больше, чем скорость V0 рассматриваемого транспортного средства 10 во время смены полосы движения на вторую полосу 32 движения. Обычно, когда рассматриваемое транспортное средство 10 меняет полосу движения на вторую полосу 32 движения, скорость V0 рассматриваемого транспортного средства 10 равна или почти равна скорости V1 другого транспортного средства 21 в пределах определенного диапазона (заданного предписанного диапазона).
[0036] На этапе S5 процессор 18 затем выводит информацию о смене полосы движения, которая включает в себя предложение выполнить управление сменой полосы, в устройство 15 вывода. То есть, на основе определения на этапе S4, процессор 18 выводит на устройство 15 вывода информацию о том, может ли быть выполнено управление сменой полосы движения (предложение, которое включает в себя информацию «управление сменой полосы движения может быть выполнено»). В частности, текст, предлагающий выполнение управления сменой полосы движения (например, «Вы хотите выполнить смену полосы движения в автономном режиме вождения?» и т.д.), отображается на экране дисплея устройства 15 вывода. Кроме того, предлагаемое выполнение управления сменой полосы движения может быть воспроизведено с помощью громкоговорителя устройства 15 вывода.
[0037] На этапе S6 процессор 18 затем определяет, была ли команда на выполнение автономной смены полосы движения введена пассажиром, таким как водитель, на основе информации о смене полосы движения. В частности, кнопка подтверждения для выполнения управления сменой полосы движения отображается вместе с текстом, предлагающим выполнение управления сменой полосы движения, на экране дисплея, который функционирует как устройство 15 вывода и устройство 16 ввода, и пассажир касается кнопки подтверждения, тем самым вводя команду для выполнения управления сменой полосы движения. Кроме того, если звуковое предложение сменить полосу движения выводится из громкоговорителя, служащего в качестве устройства 15 вывода, звук речевого ответа пассажира может быть обнаружен микрофоном, служащим в качестве устройства 16 ввода, чтобы ввести команду для выполнения управления сменой полосы движения. Кроме того, пассажир может ввести команду на выполнение управления сменой полосы движения в устройство 16 ввода, управляя индикатором указателя поворота с помощью жеста, движения века, движения в пределах прямой видимости и т.д.
[0038] Если команда выполнить управление сменой полосы движения не введена на этапе S6, управление переходит к этапу S8, и процессор 18 устанавливает режим вождения рассматриваемого транспортного средства 10 на ручной режим вождения. Между этапами S6 и S8 процессор 18 может заранее уведомить пассажира о том, что режим вождения будет установлен на ручной режим вождения, как на этапе S22.
[0039] Если на этапе S6 вводится команда на выполнение управления сменой полосы движения, на основе информации о смене полосы движения управление переходит к этапу S7, и процессор 18 выводит команду на контроллер 17 привода устройства 1 управления вождением, тем самым выполняя управление сменой полосы движения. В частности, процессор 18 управляет скоростью транспортного средства и рулевым управлением рассматриваемого транспортного средства 10 в автономном режиме вождения и выполняет управление сменой полосы движения рассматриваемого транспортного средства 10 для смены полосы движения на вторую полосу 32 движения, смежную с первой полосой 31 движения. Если другое транспортное средство 21 движется позади рассматриваемого транспортного средства 10, рассматриваемое транспортное средство 10 выполняет смену полосы движения в запланированную зону Z2 смены полосы движения перед другим транспортным средством 21, как показано на фиг.3. Кроме того, если другое транспортное средство 21 движется впереди рассматриваемого транспортного средства 10, как показано на фиг. 4, рассматриваемое транспортное средство 10 выполняет смену полосы движения в запланированную зону Z2 смены полосы движения позади другого транспортного средства 21.
[0040] То есть «позади» и «впереди» указывают направления продолжения первой полосы 31 движения и второй полосы 32 движения, показанные на фиг.3 и 4, то есть переднее и заднее положения в продольном направлении X, которое является направлением движения рассматриваемого транспортного средства 10. Кроме того, «другое транспортное средство 21 движется позади рассматриваемого транспортного средства 10» представляет собой состояние, в котором передняя концевая часть 21a другого транспортного средства 21 расположена позади задней концевой части 10b рассматриваемого транспортного средства 10, как показано на фиг. 3. «Другое транспортное средство 21 движется впереди рассматриваемого транспортного средства 10» - это состояние, в котором задняя концевая часть 21b другого транспортного средства 21 расположена впереди передней концевой части 10a рассматриваемого транспортного средства 10, как показано на Фигуре 4.
[0041] Кроме того, если скорость V1 другого транспортного средства 21 выше, чем скорость V0 рассматриваемого транспортного средства 10, и другое транспортное средство 21 движется бок о бок с одной стороны рассматриваемого транспортного средства 10, процессор 18 задерживает выполнение управления сменой полосы движения до тех пор, пока, как показано на фиг.4, другое транспортное средство 21 не окажется впереди рассматриваемого транспортного средства 10. Аналогичным образом, если скорость V1 другого транспортного средства 21 меньше скорости V0 рассматриваемого транспортного средства 10, и другое транспортное средство 21 движется с одной стороны рассматриваемого транспортного средства 10, процессор 18 задерживает выполнение смены полосы движения до тех пор, пока, как показано на фиг. 3, другое транспортное средство 21 не окажется позади рассматриваемого транспортного средства 1. Кроме того, процессор 18 может управлять скоростью V0 рассматриваемого транспортного средства 10 и, таким образом, регулировать относительное положение рассматриваемого транспортного средства 10 по отношению к другому транспортному средству 21, чтобы быть впереди или позади другого транспортного средства 21, а затем выполнить управление сменой полосы движения. То, что «другое транспортное средство 21 движется с одной стороны рассматриваемого транспортного средства 10», означает состояние, в котором длина рассматриваемого транспортного средства 10 от передней концевой части 10а до задней концевой части 10b и длина другого транспортного средства 21 от передней концевой части 21a до задней концевой части 21b по меньшей мере частично перекрываются в продольном направлении X.
[0042] Если на этапе S4 определено, что управление сменой полосы движения может быть выполнено, процессор 18 может перейти непосредственно к этапу S7, минуя этапы S5 и S6, и выполнить управление сменой полосы движения, используя автономный режим вождения. То есть, если определено, что управление сменой полосы может быть выполнено, процессор 18 может пропустить процесс предложения водителю выполнения управления сменой полосы и процесс определения того, принята ли от пассажира инструкция для выполнения управления сменой полосы движения, и немедленно выполнить управление сменой полосы движения. Здесь также процессор 18, основываясь на определении на этапе S4, выводит информацию о том, может ли быть выполнено управление сменой полосы движения (команда, которая включает в себя информацию о том, что «управление сменой полосы движения может быть выполнено»), в контроллер 17 привода устройства 1 управления вождением. На основании этой команды контроллер 17 привода выполняет управление сменой полосы движения.
[0043] Таким образом, в устройстве 1 управления вождением и способе управления вождением согласно настоящему варианту осуществления, когда на основе результата обнаружения, полученного от датчика 11a блока 11 обнаружения других транспортных средств, определяется, что другое транспортное средство 21, движущееся в пределах заданной зоны Z1 обнаружения на второй полосе 32, было обнаружено, определяется, что управление сменой полосы движения может быть выполнено. Как показано на фиг.3 и 4, когда движущееся сзади другое транспортное средство 22 движется позади другого транспортного средства 21, даже если скорость V2 движущегося сзади транспортного средства 22 больше, чем скорость V1 другого транспортного средства 21, прогнозируется что движущееся сзади другое транспортное средство 22 будет замедляться при приближении к другому транспортному средству 21. Таким образом, скорость V2 движущегося сзади транспортного средства 22, прогнозируется приблизительно равной скорости V1 другого транспортного средства 21. В результате обнаружения другого транспортного средства 21, движущегося по второй полосе 32 движения, процессор 18 устройства 1 управления вождением, таким образом, определяет, что маловероятно, что движущееся сзади другое транспортное средство 22 войдет в запланированную зону Z2 смены полосы движения рассматриваемого транспортноо средства 10 на более высокой скорости транспортного средства, чем у другого транспортного средства 21. То есть процессор 18 устройства 1 управления вождением заранее определяет наличие/отсутствие другого транспортного средства 21 во второй полосе 32 движения, на которую должна выполняться смена полосы движения, и, таким образом, определяет, может ли быть выполнено управление сменой полосы движения. В результате процессор 18 устройства 1 управления вождением может управлять рассматриваемым транспортным средством 10 для автономной смены полосы движения в тех ситуациях, когда маловероятно, что движущееся сзади другое транспортное средство 22 приблизится сзади по второй полосе 32 движения на высокой скорости, то есть в ситуациях, в которых маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади. В частности, даже когда движущееся сзади другое транспортное средство 22 не обнаружено, процессор 18 устройства 1 управления вождением может оценить ситуации, в которых маловероятно, что движущееся сзади другое транспортное средство 22 приблизится к запланированной зоне Z2 смены полосы движения рассматриваемого транспортного средства 10 сзади на высокой скорости, а затем определить, что управление сменой полосы движения может быть выполнено. С другой стороны, когда определяется, что не было обнаружено другое транспортное средство 21, движущееся в пределах заданной зоны Z1 обнаружения во второй полосе 32, процессор 18 устройства 1 управления вождением определяет, что управление сменой полосы движения не может быть выполнено. В результате выполнение управления сменой полосы движения подавляется в ситуациях, отличных от тех, в которых маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади. Кроме того, на основе определения относительно того, может ли быть выполнено управление сменой полосы движения, процессор 18 устройства 1 управления вождением выводит информацию относительно того, может ли быть выполнено управление сменой полосы движения, в цель вывода. Целью вывода может быть устройство 15 вывода, контроллер 17 привода или как устройство 15 вывода, так и контроллер 17 привода. То есть эта цель вывода представляет собой устройство 15 вывода и/или контроллер 17 привода устройства 1 управления вождением. Кроме того, информация о том, может ли быть выполнено управление сменой полосы движения, включает вывод «предложения» и/или «уведомления» на устройство 15 вывода, а также вывод «команды» на контроллер 17 привода.
[0044] Если определено, что управление сменой полосы движения может быть выполнено, процессор 18 устройства 1 управления вождением выводит информацию о смене полосы движения, предлагающую выполнить управление сменой полосы движения, на устройство 15 вывода. Затем, если пассажир, такой как водитель, на основе информации о смене полосы движения вводит команду на выполнение управления сменой полосы движения в устройство 16 ввода, процессор 18 устройства 1 управления вождением выполняет управление сменой полосы движения. Таким образом, процессор 18 устройства 1 управления вождением может выполнять управление сменой полосы движения в соответствии с намерениями человека, находящегося в автомобиле, например водителя.
[0045] С другой стороны, если на этапе S4 определено, что управление сменой полосы движения может быть выполнено, процессор 18 устройства 1 управления вождением может выполнить управление сменой полосы движения на этапе S7, не проходя этапы S5 и S6, как показано пунктирной линией на фиг. 2. То есть процессор 18 устройства 1 управления вождением на основе определения на этапе S4 выводит на контроллер 17 привода информацию о том, может ли быть выполнено управление сменой полосы движения (команда, которая включает в себя информацию о том, что «управление сменой полосы движения может быть выполнено»). В результате процессор 18 устройства 1 управления вождением может быстро выполнять управление сменой полосы движения, не проходя через процесс вывода информации о смене полосы движения на устройство 15 вывода или процесс получения инструкции для выполнения управления сменой полосы движения, которая была введена в устройство 16 ввода, в тех ситуациях, когда маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения.
[0046] Если определено, что другое транспортное средство 21 не было обнаружено в пределах зоны Z1 обнаружения, процессор 18 устройства 1 управления вождением определяет, что выполнение управления сменой полосы движения невозможно, выводит команду на запрет выполнения управления сменой полосы движения в автономном режиме вождения на контроллер 17 привода устройства 1 управления вождением и устанавливает режим вождения в ручной режим вождения. В результате выполнение процессором 18 управления сменой полосы движения подавляется в ситуациях, отличных от тех, в которых определено, что маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади. То есть процессор 18 устройства 1 управления вождением может выполнять управление сменой полосы движения ограничительно (или выборочно), т.е. ограничиваясь теми ситуациями, в которых маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади. Кроме того, в ситуациях, отличных от тех, в которых определено, что маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади, водитель рассматриваемого транспортного средства 10 может вручную изменить полосу движения на вторую полосу 32 движения, визуально проверяя условия движения рассматриваемого транспортного средства 10.
[0047] Когда определено, что для рассматриваемого транспортного средства 10 недостаточно места для выполнения смены полосы движения на вторую полосу 32 движения, процессор 18 выводит команду запретить выполнение управления сменой полосы движения на контроллер 17 привода устройства 1 управления вождением. В результате процессор 18 устройства 1 управления вождением может выполнять управление сменой полосы движения только тогда, когда соблюдены необходимые условия для рассматриваемого транспортного средства 10 для выполнения смены полосы движения.
[0048] В настоящем варианте осуществления, как показано на фиг. 5, процессор 18 может выполнять процесс этапа S23 вместо процесса этапа S3 на фиг. 2 и определять, обнаружено ли другое транспортное средство 21, движущееся сзади рассматриваемого транспортного средства 10 в пределах зоны Z1 обнаружения на второй полосе 32 движения. То есть в примере, показанном на фиг. 5, на этапе S4 процессор 18 выполняет процесс для определения того, что управление сменой полосы движения может быть выполнено только тогда, когда определено, что другое транспортное средство 21 позади рассматриваемого транспортного средства 10 было обнаружено в пределах зоны Z1 обнаружения, как показано на фиг. 3. Здесь маловероятно, что движущееся сзади другое транспортное средство 22 обгонит другое транспортное средство 21, которое находится позади рассматриваемого транспортного средства 10, и окажется впереди другого транспортного средства 21. Поэтому также маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения рассматриваемого транспортного средства 10 в то же время, когда рассматриваемое транспортное средство 10 меняет полосу движения на вторую полосу 32 движения. Следовательно, процессор 18 устройства 1 управления вождением может ограничить диапазон обнаружения другого транспортного средства 21 задней стороной рассматриваемого транспортного средства 10 и, таким образом, выполнить управление сменой полосы движения в тех ситуациях, когда крайне маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет сзади в запланированную зону Z2 смены полосы движения.
[0049] Второй вариант осуществления
Процедура способа управления вождением, выполняемая процессором 18 устройства 1 управления вождением согласно второму варианту осуществления, будет описана со ссылкой на фиг. 6. Те же ссылочные обозначения, что и на фиг. 1-5, указывают на идентичные или подобные составные элементы или этапы управления, так что избыточные пояснения опущены, и подразумевается ссылка на описания в первом варианте осуществления.
[0050] Как показано на фиг.6, если на этапе S3 определено, что другое транспортное средство 21, движущееся по второй полосе 32 движения в пределах зоны Z1 обнаружения, было обнаружено, на этапе S11 процессор 18 определяет, является ли другое транспортное средство 21, обнаруженное блоком 11 обнаружения других транспортных средств, двухколесным транспортным средством, таким как мотоцикл. Является ли другое транспортное средство 21 двухколесным транспортным средством, можно определить на основе изображения, захваченного камерой, которая является одним из датчиков 11a блока 11 обнаружения других транспортных средств, с использованием метода сопоставления с образцом и т.п. Если другое транспортное средство 21 является двухколесным транспортным средством, управление переходит к этапу S24, и процессор 18 исключает другое транспортное средство 21 в качестве цели обнаружения. То есть на этапе S24 процессор 18 отменяет определение этапа S3 о том, что «обнаружено другое транспортное средство, движущееся по второй полосе 32 движения». Затем управление возвращается к этапу S3, и процессор 18 снова определяет, обнаружил ли блок 11 обнаружения других транспортных средств присутствие отличающегося другого транспортного средства, движущегося по второй полосе 32 движения в пределах зоны Z1 обнаружения.
[0051] Если на этапе S11 определено, что другое транспортное средство 21 не является двухколесным транспортным средством, управление переходит к этапу S12, и процессор 18 определяет, превышает ли скорость V0 рассматриваемого транспортного средства 10 скорость V1 другого транспортного средства 21. Процессор 18 определяет скорость V0 рассматриваемого транспортного средства 10, определяемую датчиком скорости транспортного средства, и скорость V1 другого транспортного средства 21 на основе относительного положения другого транспортного средства 21 относительно рассматриваемого транспортного средства 10. Кроме того, блок 11 обнаружения других транспортных средств устройства 1 управления вождением может определять скорость V1 другого транспортного средства 21 на основе информации о скорости другого транспортного средства 21, полученной с использованием связи между транспортными средствами. Если определено, что скорость V0 рассматриваемого транспортного средства 10 меньше скорости V1 другого транспортного средства 21, то есть что скорость V1 другого транспортного средства 21 больше скорости V0 рассматриваемого транспортного средства 10, управление переходит к этапу S13.
[0052] На этапе S13 процессор 18 определяет, является ли разница между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21 большей или равной заданной разнице dV скоростей. Если разница между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21 больше или равна заданной разнице dV скоростей, управление переходит к этапу S24, и процессор 18 исключает другое транспортное средство 21 как цель обнаружения. То есть на этапе S24 процессор 18 отменяет определение этапа S3 о том, что «обнаружено другое транспортное средство, движущееся по второй полосе 32 движения», и управление возвращается к этапу S3. На этапе S3 процессор 18 снова определяет, обнаружил ли блок 11 обнаружения других транспортных средств другое транспортное средство, движущееся по второй полосе 32 движения в пределах зоны Z1 обнаружения. В этом случае это другое транспортное средство, обнаруженное блоком 11 обнаружения других транспортных средств, может быть отличным транспортным средством, чем другое транспортное средство 21. Кроме того, если другое транспортное средство 21 замедляется и разница между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21 становится меньше заданной разности dV скоростей, другое транспортное средство 21 может быть повторно установлено как цель обнаружения на этапе S3.
[0053] С другой стороны, если разница между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21 меньше, чем заданная разница dV скоростей, управление переходит к этапу S14, и процессор 18 выводит команду к контроллеру 17 привода устройства 1 управления вождением для ускорения рассматриваемого транспортного средства 10 таким образом, чтобы скорость V0 рассматриваемого транспортного средства 10 стала больше или равна скорости V1 другого транспортного средства 21. То есть процессор 18 управляет скоростью V0 рассматриваемого транспортного средства 10 так, что скорость V0 рассматриваемого транспортного средства 10 становится больше или равной скорости V1 другого транспортного средства 21. Затем управление возвращается к этапу S12, и процессор 18 снова определяет, является ли скорость V0 рассматриваемого транспортного средства 10 большей или равной скорости V1 другого транспортного средства 21. Предписанная разница dV скоростей является верхним предельным значением разницы скоростей степени, в которой рассматриваемое транспортное средство 10 может менять полосу движения, ускоряясь и сохраняя определенное расстояние от другого транспортного средства 21. Предписанная разница dV скоростей определяется экспериментально и основывается на характеристиках рассматриваемого транспортного средства 10.
[0054] С другой стороны, если на этапе S12 определено, что скорость V0 рассматриваемого транспортного средства 10 больше или равна скорости V1 другого транспортного средства 21, управление процессом переходит к этапу S4, и процессор 18 определяет, что управление сменой полосы движения в автономном режиме вождения может быть выполнено.
[0055] Таким образом, в устройстве 1 управления вождением и способе управления вождением согласно настоящему варианту осуществления, когда скорость V0 рассматриваемого транспортного средства 10 больше или равна скорости V1 другого транспортного средства 21, определяется, что может быть выполнено управление сменой полосы движения. Если скорость V0 рассматриваемого транспортного средства 10 меньше скорости V1 другого транспортного средства 21, процессор 18 устройства 1 управления вождением выдает команду на контроллер 17 привода устройства 1 управления вождением для управления скоростью V0 рассматриваемого транспортного средства 10, так что скорость V0 рассматриваемого транспортного средства 10 становится больше или равной скорости V1 другого транспортного средства 21. В результате процессор 18 устройства 1 управления вождением способен плавно менять полосу движения рассматриваемого транспортного средства 10 в состоянии, в котором скорость V0 рассматриваемого транспортного средства 10 является такой же, как скорость V1 другого транспортного средства 21, или большей, чем скорость V1 другого транспортного средства 21. Кроме того, если скорость V1 другого транспортного средства 21 меньше или равна скорости V0 рассматриваемого транспортного средства 10, становится менее вероятным, что движущееся сзади другое транспортное средство 22 приблизится к запланированной зоне Z2 смены полосы движения рассматриваемого транспортного средства 10 со скоростью транспортного средства, превышающей скорость рассматриваемого транспортного средства 10 в момент выполнения управления сменой полосы движения. Управление скоростью V0 рассматриваемого транспортного средства 10 с помощью устройства 1 управления вождением не ограничивается ускорением. Например, если другое транспортное средство 21 внезапно замедляется, процессор 18 устройства 1 управления движением может снизить скорость V0 рассматриваемого транспортного средства 10, чтобы сохранить такое же расстояние между транспортными средствами до другого транспортного средства 21, или выполнить управление, чтобы сохранить постоянную скорость без изменения скорости V0 рассматриваемого транспортного средства 10.
[0056] Кроме того, если скорость V1 другого транспортного средства 21 больше, чем скорость V0 рассматриваемого транспортного средства 10, и разница между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21 больше чем или равна заданной разнице dV скоростей, процессор 18 устройства 1 управления вождением отменяет определение этапа S3, что «обнаружено другое транспортное средство, движущееся по второй полосе 32 движения». Это связано с тем, что если скорость V1 другого транспортного средства 21 слишком высока по сравнению со скоростью V0 рассматриваемого транспортного средства 10, вполне вероятно, что движущееся сзади другое транспортное средство 22 также приблизится к запланированной зоне Z2 смены полосы движения на большей скорости транспортного средства, чем скорость рассматриваемого транспортного средства 10 в то время, когда управление сменой полосы движения выполняется устройством 1 управления движением. Таким образом, процессор 18 устройства 1 управления вождением согласно настоящему варианту осуществления может выполнять управление сменой полосы движения рассматриваемого транспортного средства 10 ограничительно (или выборочно), т.е. ограничиваясь теми ситуациями, в которых маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет сзади в запланированную зону Z2 смены полосы движения. Кроме того, когда разница между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21 больше или равна заданной разнице dV скоростей, поскольку нет необходимости согласовать скорость V0 рассматриваемого транспортного средства 10 со скоростью V1 другого транспортного средства 21, процессор 18 устройства 1 управления вождением может предотвращать внезапное ускорение рассматриваемого транспортного средства 10, когда выполняется управление сменой полосы движения.
[0057] Кроме того, процессор 18 устройства 1 управления вождением отменяет определение этапа S3 о том, что «обнаружено другое транспортное средство, движущееся по второй полосе 32 движения», даже если другое транспортное средство 21 является двухколесным транспортным средством. Это связано с тем, что если другое транспортное средство 21 является двухколесным транспортным средством, то психологическое давление, которое испытает водитель движущегося сзади другого транспортного средства 22, будет меньше по сравнению со случаями, когда другое транспортное средство 21 является легковым или большим грузовиком; таким образом, такое движущееся сзади другое транспортное средство 22 может не замедляться при приближении к другому транспортному средству 21. То есть, если другое транспортное средство 21 является двухколесным транспортным средством, становится более вероятным, что движущееся сзади другое транспортное средство 22 приблизится к запланированной зоне Z2 смены полосы движения рассматриваемого транспортного средства 10 сзади на высокой скорости по сравнению со случаями, когда другое транспортное средство 21 представляет собой легковой автомобиль или большой грузовик. Следовательно, процессор 18 устройства 1 управления вождением настоящего варианта осуществления может выполнять управление сменой полосы движения рассматриваемого транспортного средства 10 ограничительно (или выборочно), т.е. ограничиваясь теми ситуациями, в которых маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет сзади в запланированную зону Z2 смены полосы движения.
[0058] В настоящем варианте осуществления, если на этапе S12 по фиг. 6 определено, что скорость V0 рассматриваемого транспортного средства 10 меньше скорости V1 другого транспортного средства 21, управление может перейти к этапу S14, минуя этап S13, как показано пунктирной линией на фиг. 6. То есть, если определено, что скорость V0 рассматриваемого транспортного средства 10 меньше скорости V1 другого транспортного средства 21, процессор 18, независимо от разницы между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21, может управлять скоростью V0 рассматриваемого транспортного средства 10 для ускорения рассматриваемого транспортного средства 10.
[0059] Кроме того, на этапе S3 на фиг. 6, если другое транспортное средство 21 обнаружено в зоне Z1 обнаружения второй полосы 32 движения, управление может пропустить этап S11 и перейти к этапу S12. То есть процессору 18 нет необходимости определять, является ли другое транспортное средство 21 двухколесным транспортным средством. Кроме того, этап S2 на фиг. 6 можно пропустить таким же образом, как и в первом варианте осуществления. Кроме того, этапы S5 и S6 на фиг. 6 также могут быть пропущены таким же образом, как и в первом варианте осуществления. Таким образом, даже если какой-либо из этапов S2, S5, S6 и S11 пропущен, процессор 18 может выполнить управление сменой полосы движения в ситуации, в которой маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади, как описано выше.
[0060] Третий вариант осуществления
Процедура способа управления вождением, выполняемая процессором 18 устройства 1 управления вождением согласно третьему варианту осуществления, будет описана со ссылкой на фиг.7. Те же ссылочные обозначения, что и на фиг. 1-6, обозначают идентичные или подобные составные элементы или этапы управления, так что избыточные пояснения опущены и подразумевается ссылка на первый и второй варианты осуществления.
[0061] Как показано на Фиг.7, на этапе S11, если определено, что другое транспортное средство 21 не является двухколесным транспортным средством, управление переходит к этапу S15, и процессор 18 использует камеру или радар блока 11 обнаружения других транспортных средств, чтобы определить, движется ли другое транспортное средство 21 позади рассматриваемого транспортного средства 10. Если определено, что другое транспортное средство 21 не движется позади рассматриваемого транспортного средства 10, то есть, если определено, что другое транспортное средство 21 движется сбоку или впереди от рассматриваемого транспортного средства 10, управление переходит к этапу S16.
[0062] На этапе S16 процессор 18 определяет, движется ли другое транспортное средство 21 впереди рассматриваемого транспортного средства 10 по меньшей мере на заданное расстояние D0. То есть процессор 18 определяет, движется ли другое транспортное средство 21 впереди рассматриваемого транспортного средства 10 и продольный интервал D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 больше или равен заданному расстоянию D0. Как показано на фиг.4, продольный интервал D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 равен расстоянию между передней концевой частью 10а рассматриваемого транспортного средства 10 и задней концевой частью 21b другого транспортного средства 21 в продольном направлении X (направление движения рассматриваемого транспортного средства 10). Кроме того, блок 11 обнаружения других транспортных средств определяет относительное положение другого транспортного средства 21 по отношению к рассматриваемому транспортному средству 10 с использованием радара и т.п. Кроме того, блок 11 обнаружения других транспортных средств может обнаруживать относительное положение другого транспортного средства 21 по отношению к рассматриваемому транспортному средству 10 на основе информации о положении другого транспортного средства 21, обнаруженной с использованием связи между транспортными средствами.
[0063] Если на этапе S16 определено, что другое транспортное средство 21 движется впереди рассматриваемого транспортного средства 10 по меньшей мере на заданное расстояние D0, управление переходит к этапу S24, и процессор 18 исключает другое транспортное средство 21 в качестве цели обнаружения. То есть на этапе S24 процессор 18 отменяет определение этапа S3 о том, что «было обнаружено другое транспортное средство, движущееся по второй полосе 32 движения», и управление возвращается к этапу S3. На этапе S3 процессор 18 снова определяет, обнаружил ли блок 11 обнаружения других транспортных средств присутствие другого транспортного средства, движущегося по второй полосе 32 движения. В этом случае это другое транспортное средство, обнаруженное блоком 11 обнаружения других транспортных средств, может быть отличным транспортным средством, чем другое транспортное средство 21, и другое транспортное средство 21 может снова стать целью обнаружения на этапе S3, если другое транспортное средство 21 замедляется и продольный интервал D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 становится меньше заданного расстояния D0.
[0064] С другой стороны, на этапе S16, если определено, что продольный интервал D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 меньше заданного расстояния D0, управление переходит к этапу S14, и процессор 18 ускоряет рассматриваемого транспортного средства 10 до тех пор, пока другое транспортное средство 21 не окажется позади рассматриваемого транспортного средства 10. То есть процессор 18 регулирует скорость V0 рассматриваемого транспортного средства 10 так, чтобы рассматриваемое транспортное средство 10 перемещалось в положение впереди другого транспортного средства 21. Затем управление возвращается к этапу S15, и процессор 18 снова определяет, движется ли другое транспортное средство 21 позади рассматриваемого транспортного средства 10. Заданное расстояние D0 меньше или равно максимальному продольному интервалу D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 в пределах зоны Z1 обнаружения, и устанавливается экспериментально и основано на характеристиках рассматриваемого транспортного средства 10. Более конкретно, заданное расстояние D0 представляет собой максимальное расстояние, насколько можно предсказать, что другое транспортное средство 21 будет отделено от передней стороны рассматриваемого транспортного средства 10 так, чтобы его нельзя было обнаружить оптическим датчиком блока 11 обнаружения других транспортных средств, сразу после того, как другое транспортное средство 21 разгоняется.
[0065] С другой стороны, на этапе S15, если определено, что другое транспортное средство 21 движется позади рассматриваемого транспортного средства 10, управление переходит к этапу S4, и процессор 18 определяет, что управление сменой полосы движения может быть выполнено.
[0066] Таким образом, если другое транспортное средство 21 движется впереди рассматриваемого транспортного средства 10 и продольный интервал D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 (расстояние в направлении движения рассматриваемого транспортного средства 10) больше или равно заданному расстоянию D0, процессор 18 устройства 1 управления вождением отменяет определение этапа S3 о том, что «обнаружено другое транспортное средство, движущееся по второй полосе 32 движения». Это связано с тем, что если продольный интервал D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 слишком велик, существует вероятность того, что движущееся сзади другое транспортное средство 22 обгонит рассматриваемое транспортное средство 10, а затем замедлится, и вероятно станет так, что движущееся сзади другое транспортное средство 22 приблизится к запланированной зоне Z2 смены полосы движения рассматриваемого транспортного средства 10 на более высокой скорости транспортного средства, чем рассматриваемое транспортное средство 10. Таким образом, процессор 18 устройства 1 управления вождением в настоящем варианте осуществления может выполнять управление сменой полосы движения рассматриваемого транспортного средства 10 ограничительно (или выборочно), т.е. ограничиваясь теми ситуациями, в которых маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z1 обнаружения на второй полосе 32 движения. Кроме того, если другое транспортное средство 21 находится впереди рассматриваемого транспортного средства 10 и отделено от него по меньшей мере предписанным расстоянием D0, нет необходимости ускорять рассматриваемое транспортное средство 10; следовательно, процессор 18 устройства 1 управления вождением может предотвращать внезапное ускорение рассматриваемого транспортного средства 10, когда выполняется управление сменой полосы движения. Кроме того, поскольку рассматриваемое транспортное средство 10 ускоряется только тогда, когда продольный интервал D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 меньше заданного расстояния D0, процессор 18 устройства 1 управления вождением может выполнять управление сменой полосы движения в состоянии, в котором другое транспортное средство 21 постоянно обнаруживается оптическим датчиком блока 11 обнаружения других транспортных средств.
[0067] В настоящем варианте осуществления, на этапе S15 на фиг. 7, если определено, что другое транспортное средство 21 не движется позади рассматриваемого транспортного средства 10, управление процессом может перейти к этапу S14, не переходя к этапу S16, как указано пунктирной линией на фиг. 7. То есть, если определено, что другое транспортное средство 21 не движется позади рассматриваемого транспортного средства 10, процессор 18 может управлять скоростью V0 рассматриваемого транспортного средства 10 независимо от продольного интервала D между рассматриваемым транспортным средством 10 и другим транспортным средством 21 и ускорять рассматриваемое транспортное средство 10.
[0068] Кроме того, этап S2 на фиг. 7 может быть пропущен таким же образом, как и в первом варианте осуществления. Кроме того, этапы S5 и S6 на фиг. 7 также могут быть пропущены таким же образом, как и в первом варианте осуществления. Кроме того, этап S11 на фиг. 7 можно пропустить таким же образом, как и во втором варианте осуществления. Таким образом, даже если какой-либо из этапов S2, S5, S6 и S11 пропущен, процессор 18 может выполнять управление сменой полосы движения в ситуациях, когда маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади, как описано выше.
[0069] Четвертый вариант осуществления
Устройство 1 управления вождением согласно четвертому варианту осуществления будет описано со ссылкой на фиг. 1, а процедура способа управления вождением, выполняемая процессором 18 устройства 1 управления вождением, будет описана со ссылкой на фиг. 8. Те же ссылочные обозначения, что и на фиг. 1-7, указывают на идентичные или подобные составные элементы или этапы управления, поэтому избыточные пояснения опущены и подразумевается ссылка на варианты осуществления с первого по третий.
[0070] В настоящем варианте осуществления процессор 18 устройства 1 управления вождением, показанного на фиг.1, может устанавливать режим вождения в первый режим или второй режим. То есть процессор 18 может переключать режим управления между первым режимом и вторым режимом. Уровень помощи при вождении во втором режиме выше, чем уровень помощи при вождении в первом режиме. В частности, процессор 18 может установить первый режим, соответствующий уровню 2 помощи при вождении, и второй режим, соответствующий уровню 3 помощи при вождении, в качестве режимов вождения. Эти уровни помощи при вождении определяются, не ограничиваясь этим, по схеме классификации в соответствии с определениями вышеупомянутого Общества автомобильных инженеров США.
[0071] Если режим вождения установлен на первый режим, водитель должен визуально контролировать условия, окружающие рассматриваемое транспортное средство. Кроме того, первый режим - это режим с активным участием. Режим с активным участием представляет собой режим, в котором автономное рулевое управление с помощью устройства 1 управления вождением не работает, когда водитель не держит рулевое колесо 14а. То, держит ли водитель рулевое колесо 14а, определяется датчиком крутящего момента на рулевом колесе EPS или сенсорным датчиком, предусмотренным на рулевом колесе 14а. «Водитель держит рулевое колесо 14а» не ограничивается состоянием, в котором водитель крепко держит рулевое колесо 14а, но также включает состояние, в котором водитель слегка касается рулевого колеса 14а.
[0072] С другой стороны, если режим вождения установлен на второй режим, блок 11 обнаружения других транспортных средств устройства 1 управления вождением отслеживает условия, окружающие рассматриваемое транспортное средство, используя камеру, радар и т.п. То есть, если автономный режим вождения установлен на второй режим, условия движения в непосредственной близости от рассматриваемого транспортного средства автоматически отслеживаются устройством 1 управления вождением. Кроме того, второй режим представляет собой режим без активного участия. Режим без активного участия представляет собой режим, в котором управление рулевым управлением с помощью процессора 18 работает, даже если руки водителя оставляют рулевое колесо 14а. Второй режим - это автономный режим вождения.
[0073] В дополнение к первому режиму и второму режиму процессор 18 может устанавливать другие режимы вождения, соответствующие различным уровням помощи при вождении. В настоящем варианте осуществления может быть предусмотрен режим вождения, имеющий более низкий уровень помощи при вождении, чем первый режим, и может быть предоставлен режим, имеющий более высокий уровень помощи при вождении, чем второй режим. Один или несколько режимов, имеющих уровень помощи при вождении выше, чем первый режим, и ниже, чем второй режим, могут быть установлены между первым режимом и вторым режимом.
[0074] Процедура способа управления вождением, осуществляемая устройством 1 управления вождением, теперь будет описана со ссылкой на фиг.8. Как показано на фиг.8, на этапе S3, если обнаружено другое транспортное средство 21, движущееся в пределах зоны Z1 обнаружения во второй полосе 32 движения, на этапе S17 процессор 18 определяет, что управление сменой полосы во втором режиме может быть выполнено. На этапе S18 процессор 18 затем устанавливает второй режим вождения, который является автономным режимом вождения. Затем на этапе S19 процессор 18 выполняет управление сменой полосы движения во втором режиме. То есть, на основе определения на этапе S17, процессор 18 выводит информацию в контроллер 17 привода устройства 1 управления вождением относительно того, может ли быть выполнено управление сменой полосы движения (команда, которая включает в себя информацию о том, что «управление сменой полосы движения во втором режиме может быть выполнено»).
[0075] Кроме того, на этапе S3, если другое транспортное средство 21, движущееся в пределах зоны Z1 обнаружения во второй полосе 32 движения, не обнаружено, на этапе S30 процессор 18 определяет, что управление сменой полосы движения во втором режиме не может быть выполнено. Затем на этапе S31 процессор 18 устанавливает первый режим управления. Затем на этапе S32 процессор 18 выполняет управление сменой полосы движения в первом режиме. То есть, на основе определения на этапе S30, процессор 18 выводит информацию в контроллер 17 привода относительно того, может ли быть выполнено управление сменой полосы движения (команда, которая включает в себя информацию о том, что «управление сменой полосы движения во втором режиме не может быть выполнено»).
[0076] В настоящем варианте осуществления первый режим является автономным режимом вождения, но никаких ограничений на него не подразумевается, и первый режим может быть ручным режимом вождения. Если первый режим является ручным режимом вождения, водитель меняет полосу движения при ручном вождении после этапа S31, так что этап S32 на фиг.8 пропускается.
[0077] Исходя из вышеизложенного, когда на основании результата обнаружения, полученного от датчика 11а, определяется, что другое транспортное средство 21 было обнаружено в пределах заданной зоны Z1 обнаружения во второй полосе 32 движения, процессор 18 устройства 1 управления вождением определяет, что управление сменой полосы движения во втором режиме может быть выполнено. Кроме того, если определено, что не было обнаружено другое транспортное средство 21, движущееся в пределах зоны Z1 обнаружения по второй полосе 32 движения, процессор 18 устройства 1 управления вождением определяет, что управление сменой полосы во втором режиме не может быть выполнено. Процессор 18 устройства 1 управления вождением может переключать режим вождения между первым режимом, который требует визуального контроля водителем условий, окружающих рассматриваемое транспортное средство, и вторым режимом, который представляет собой автономный режим вождения, в котором устройство 1 управления вождением выполняет мониторинг окружающих условий рассматриваемого транспортного средства. То есть, если другое транспортное средство 21 обнаружено в пределах зоны Z1 обнаружения и определено, что маловероятно, что движущееся сзади другое транспортное средство 22 приблизится к запланированной зоне Z2 смены полосы движения рассматриваемого транспортного средства 10 сзади на более высокой скорости, чем скорость другого транспортного средства 21, процессор 18 устройства 1 управления вождением определяет, что управление сменой полосы движения во втором режиме с мониторингом окружающих условий рассматриваемого транспортного средства 10 может быть выполнено. С другой стороны, если другое транспортное средство 21 не обнаружено в пределах зоны Z1 обнаружения, процессор 18 устройства 1 управления вождением устанавливает режим вождения в первый режим. В результате, если другое транспортное средство 21 не обнаружено в пределах зоны Z1 обнаружения, смена полосы движения рассматриваемого транспортного средства 10 выполняется в состоянии, в котором водителем визуально контролируются окружающие условия рассматриваемого транспортного средства 10. Следовательно, если определено, что маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади, процессор 18 устройства 1 управления вождением может выполнить управление сменой полосы движения на более высоком уровне помощи при вождении. Таким образом, если определено, что в зоне Z1 обнаружения обнаружено другое транспортное средство 21, процессор 18 устройства 1 управления вождением может выполнять управление сменой полосы движения во втором режиме, тем самым снижая нагрузку на водителя.
[0078] Кроме того, из автономных режимов вождения, устанавливаемых устройством 1 управления вождением, первый режим является режимом с активным участием, в котором управление рулевым управлением посредством устройства 1 управления вождением не работает, когда водитель не держит рулевое колесо 14a. С другой стороны, второй режим является режимом без активного участия, в котором управление рулевым управлением с помощью устройства 1 управления вождением работает, даже если руки водителя оставляют рулевое колесо 14а. Следовательно, если определено, что другое транспортное средство 21 обнаружено, процессор 18 устройства 1 управления вождением определяет, что маловероятно, что движущееся сзади другое транспортное средство 22 внезапно въедет в запланированную зону Z2 смены полосы движения сзади, и что может быть выполнено управление сменой полосы движения в режиме без активного участия, что снижает нагрузку на водителя. С другой стороны, поскольку первый режим является режимом с активным участием, если определено, что другое транспортное средство 21 не обнаружено, смена полосы движения выполняется в состоянии, в котором водитель может реагировать на непредвиденные ситуации при ручном вождении.
[0079] В настоящем варианте осуществления этап S2 на фиг. 8 может быть пропущен таким же образом, как и в первом варианте осуществления. Кроме того, между этапами S17 и S18 процессор 18 может выводить информацию о смене полосы движения на устройство 15 вывода, предполагая, что управление сменой полосы движения во втором режиме может быть выполнено, и может выполнять процесс, когда устройство 16 ввода получает команду на выполнение управления сменой полосы движения во втором режиме.
[0080] Кроме того, в любом из вариантов осуществления с первого по четвертый, если разница между скоростью V0 рассматриваемого транспортного средства 10 и скоростью V1 другого транспортного средства 21 больше или равна заданной разнице dV скоростей, процессор 18 может выполнить процесс для отмены определения этапа S3 о том, что «было обнаружено другое транспортное средство, движущееся по второй полосе 32 движения». Аналогичным образом, в любом из вариантов осуществления с первого по четвертый, если другое транспортное средство 21 движется впереди и отделено от рассматриваемого транспортного средства 10 по меньшей мере на предписанное расстояние D0, процессор 18 может выполнить процесс для отмены определения этапа S3, что «было обнаружено другое транспортное средство, движущееся по второй полосе 32 движения». Кроме того, в любом из вариантов осуществления с первого по четвертый, если другое транспортное средство 21 является двухколесным транспортным средством, процессор 18 может выполнить процесс для отмены определения этапа S3 о том, что «обнаружено другое транспортное средство, движущееся по второй полосе 32 движения».
[0081] Когда рассматриваемое транспортное средство 10 выполняет смену полосы движения на смежную со смежной полосу движения, процессор 18 определяет, обнаружено ли другое транспортное средство в пределах заданной зоны обнаружения как для смежной полосы движения, так и для смежной со смежной полосы движения. Если определено, что другое транспортное средство обнаружено в заданной зоне обнаружения на смежной полосе движения и/или смежной со смежной полосе движения, процессор 18 определяет, что управление сменой полосы движения на смежную со смежной полосу движения может быть выполнено. С другой стороны, если определено, что другое транспортное средство не обнаружено в заданной зоне обнаружения как в смежной полосе движения, так и в смежной со смежной полосе движения, процессор 18 определяет, что управление сменой полосы движения на смежную со смежной полосу движения не может быть выполнено. На основе этих определений процессор 18 выводит информацию на устройство 15 вывода и/или контроллер 17 привода относительно возможности выполнения управления сменой полосы движения. В результате процессор 18 может выполнять управление сменой полосы движения в тех ситуациях, когда маловероятно, что движущееся сзади другое транспортное средство внезапно въедет в запланированную зону смены полосы движения смежной со смежной полосы движения сзади, и в которых маловероятно что движущееся сзади другое транспортное средство, движущееся по смежной полосе движения на высокой скорости, внезапно приблизится к рассматриваемому транспортному средству 10 во время смены полосы движения.
[0082] 1 … Устройство управления вождением
10 … Рассматриваемое транспортное средство
11 … Блок обнаружения других транспортных средств
11а … Датчик
14а … Рулевое колесо
15 … Устройство вывода
16 … Устройство ввода
18 … Процессор
21 … Другое транспортное средство
31 … Первая полоса движения
32 … Вторая полоса движения
V1 … Скорость другого транспортного средства
V0 … Скорость рассматриваемого транспортного средства
Z1 … Зона обнаружения
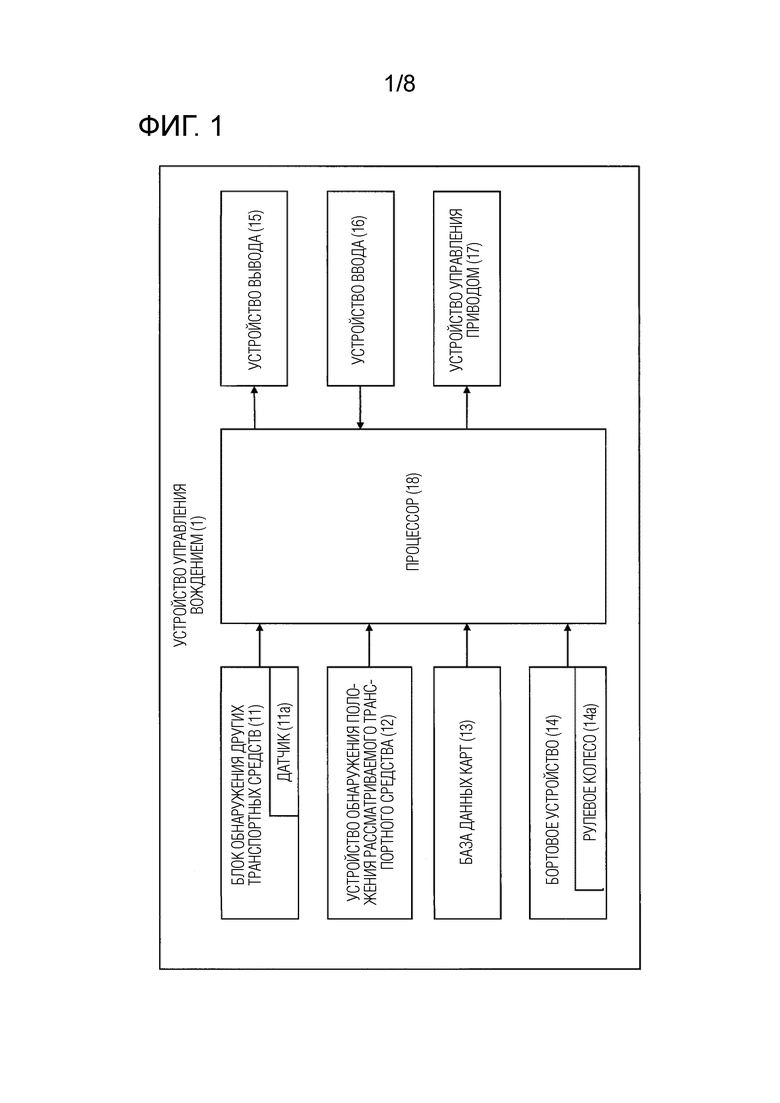
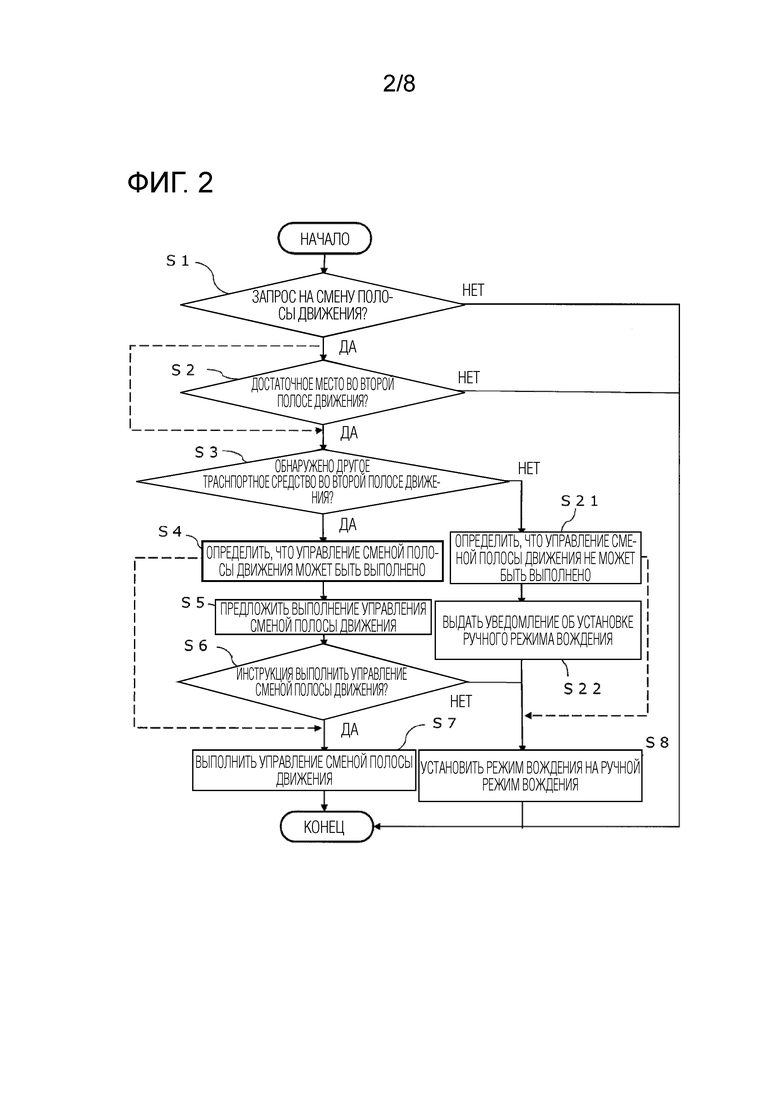
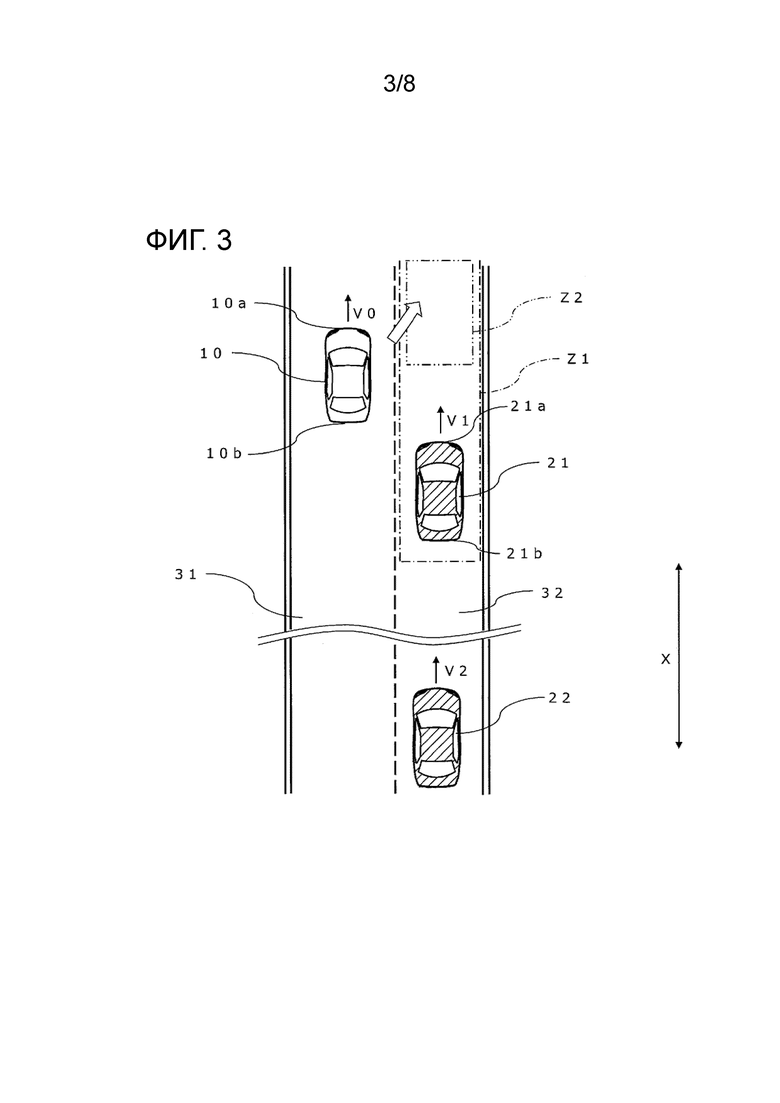
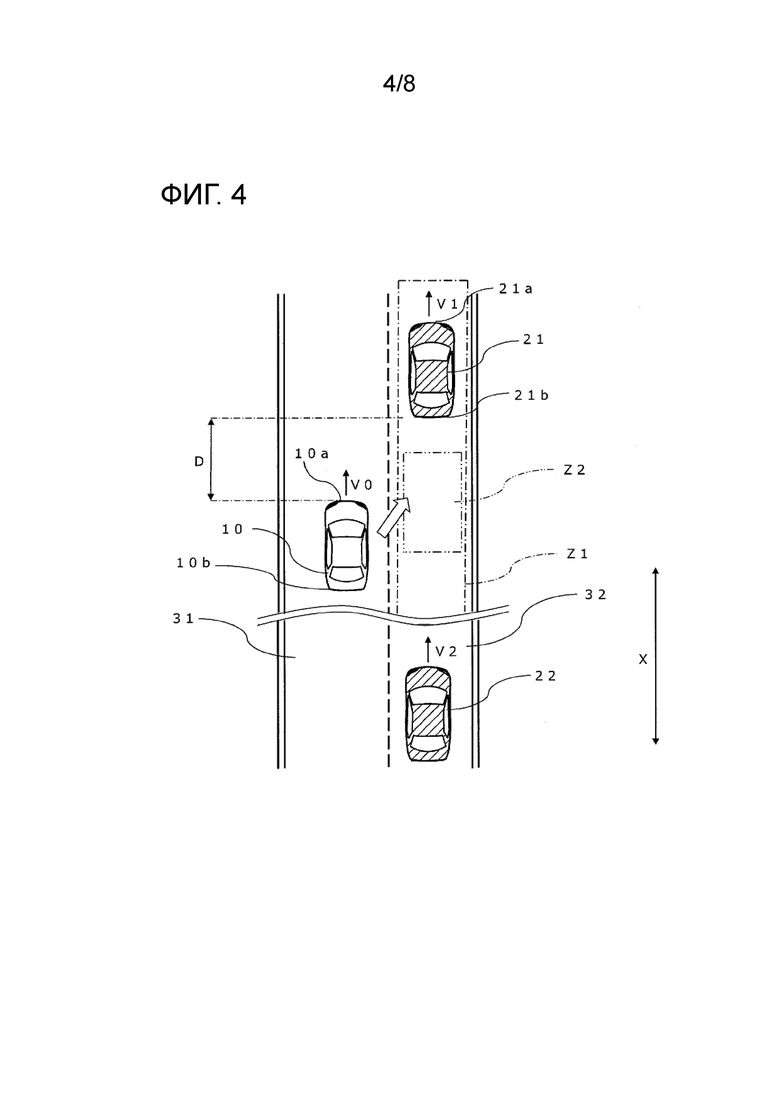
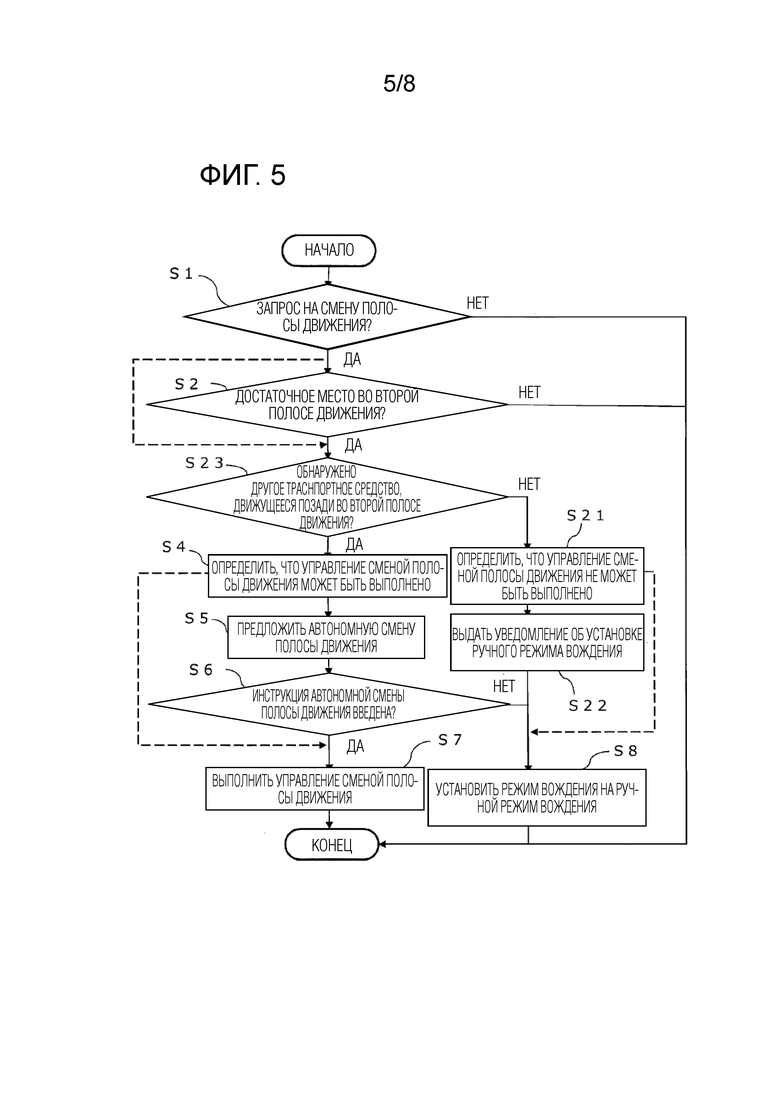
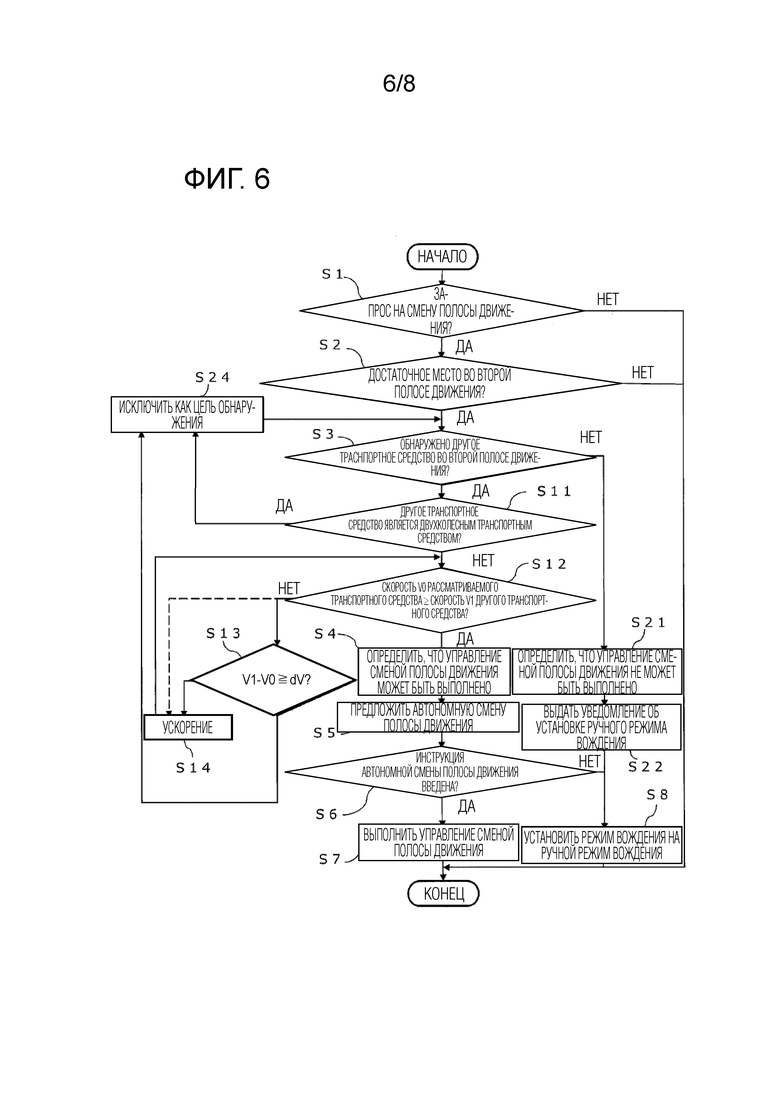
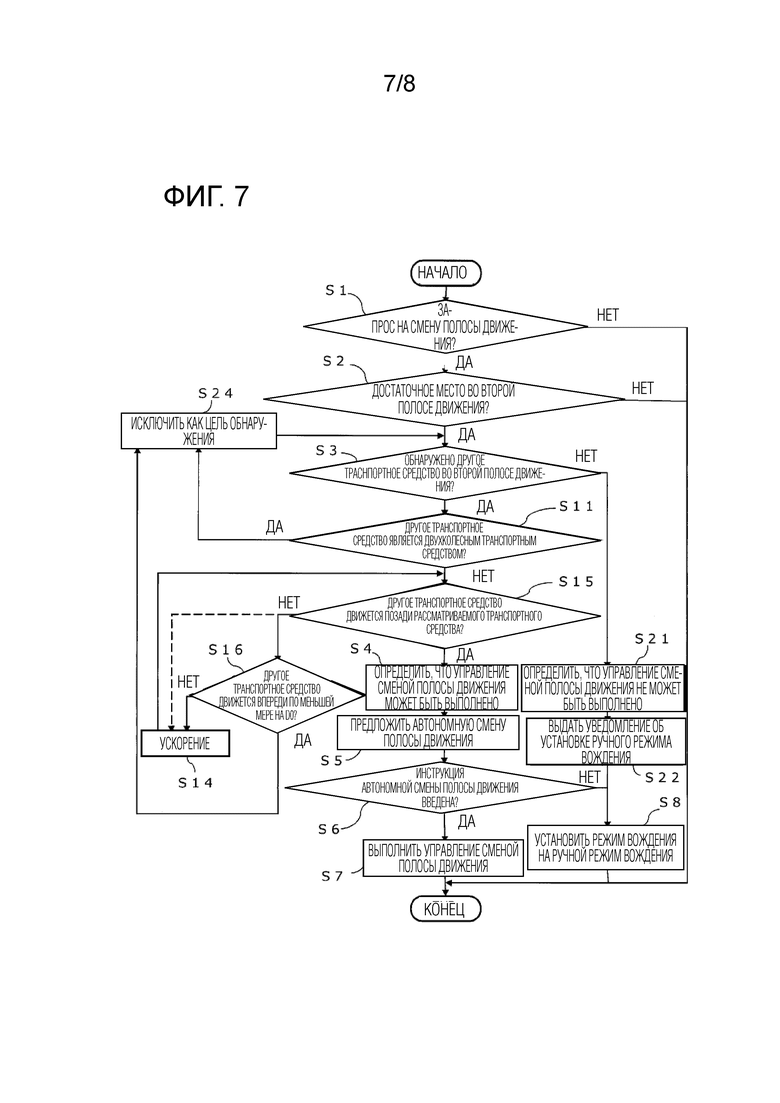
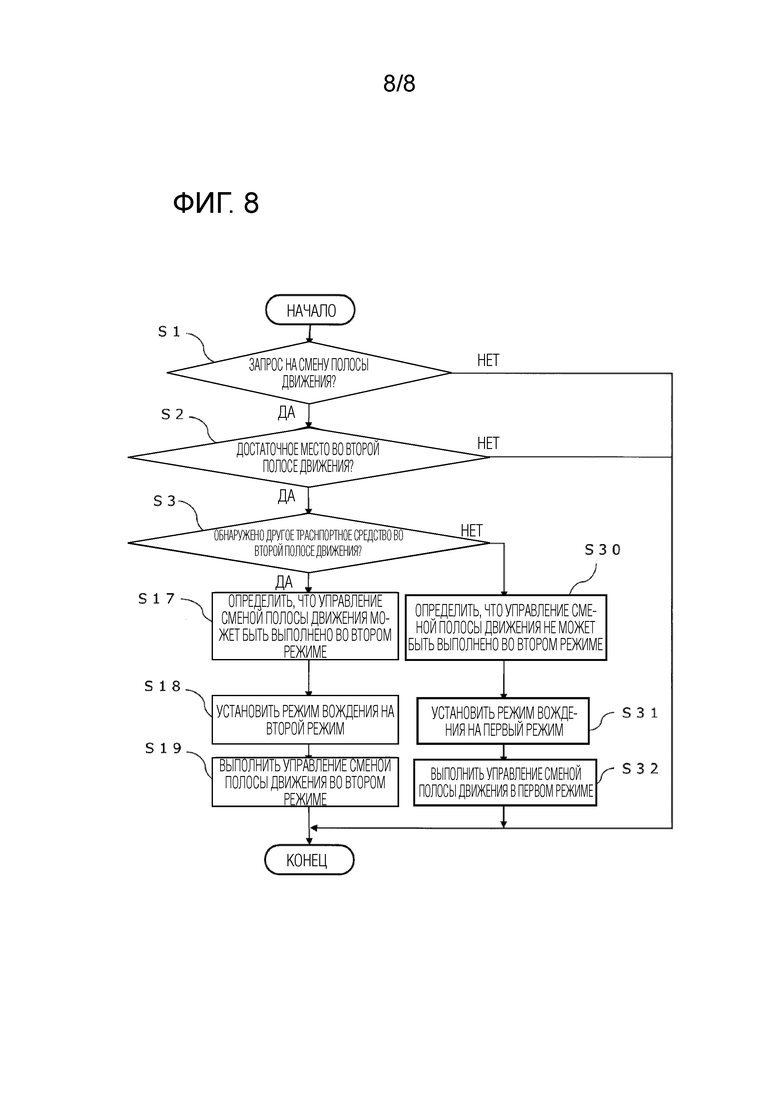
Группа изобретений относится к способу и устройству управления вождением. Устройство управления вождением служит для выполнения автономного изменения полосы движения с первой полосы движения на смежную вторую полосу движения. Устройство управления посредством процессора управляет скоростью и рулевым управлением рассматриваемого транспортного средства, движущегося по первой полосе движения в автономном режиме вождения. Блок обнаружения других транспортных средств обнаруживает другое транспортное средство, движущееся по второй полосе движения. Процессор определяет обнаружено ли другое транспортное средство, движущееся в пределах заданной зоны обнаружения на второй полосе движения. Управление сменой полосы движения на смежную полосу движения выполняется, если обнаружено другое транспортное средство, движущееся в смежной полосе движения. Управление сменой полосы движения не выполняется, если другое транспортное средство не обнаружено. Управление сменой полосы движения выполняется впереди другого транспортного средства, обнаруженного позади рассматриваемого транспортного средства. Достигается повышение безопасности выполнения смены полосы движения. 2 н. и 12 з.п. ф-лы, 8 ил. 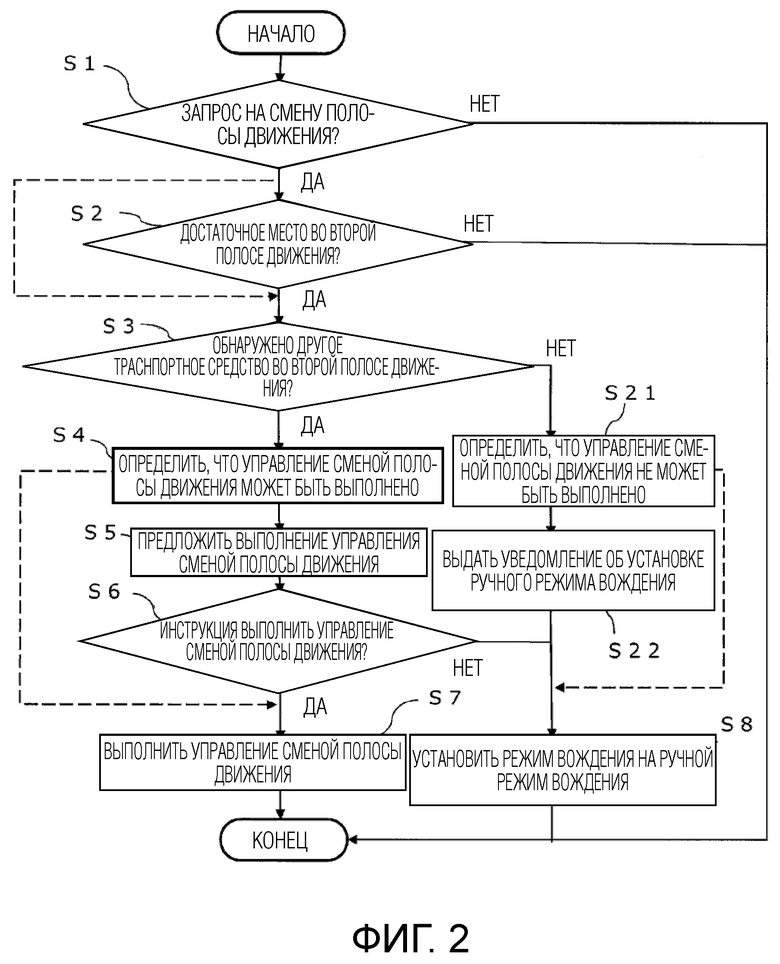
1. Способ управления вождением для выполнения управления сменой полосы движения для управления рассматриваемым транспортным средством для автономного изменения полосы движения с первой полосы движения на смежную вторую полосу движения с использованием процессора устройства управления вождением, которое управляет скоростью и рулевым управлением рассматриваемого транспортного средства, движущегося по первой полосе движения в автономном режиме вождения, содержащий:
процессор, который
получает результат обнаружения в отношении другого транспортного средства, движущегося по второй полосе движения, от датчика, установленного на рассматриваемом транспортном средстве,
определяет, обнаружено ли другое транспортное средство в пределах заданной зоны обнаружения, на основе результата обнаружения,
причем управление сменой полосы движения на смежную полосу движения выполняется, если обнаружено другое транспортное средство, движущееся в смежной полосе движения,
управление сменой полосы движения не выполняется, если другое транспортное средство не обнаружено, причем
управление сменой полосы движения выполняется впереди другого транспортного средства, обнаруженного позади рассматриваемого транспортного средства.
2. Способ управления вождением по п. 1, в котором
процессор определяет, что управление сменой полосы движения может быть выполнено после определения того, что другое транспортное средство было обнаружено в пределах заданной зоны обнаружения и позади рассматриваемого транспортного средства, на основе результата обнаружения.
3. Способ управления вождением по п. 1 или 2, в котором
процессор
обнаруживает скорость другого транспортного средства после определения того, что другое транспортное средство было обнаружено в пределах заданной зоны обнаружения,
определяет, что управление сменой полосы движения может быть выполнено после определения того, что скорость рассматриваемого транспортного средства больше или равна скорости другого транспортного средства, и
выдает команду на устройство управления вождением для управления скоростью транспортного средства таким образом, чтобы скорость рассматриваемого транспортного средства становилась больше или равной скорости другого транспортного средства.
4. Способ управления вождением по любому из пп. 1-3, в котором
процессор
обнаруживает скорость рассматриваемого транспортного средства и скорость другого транспортного средства, и
отменяет определение того, что другое транспортное средство было обнаружено, после определения того, что скорость другого транспортного средства больше, чем скорость рассматриваемого транспортного средства, и разница между скоростью другого транспортного средства и скоростью рассматриваемого транспортного средства больше или равна заданной разнице скоростей.
5. Способ управления вождением по любому из пп. 1-4, в котором
процессор
обнаруживает относительное положение другого транспортного средства по отношению к рассматриваемому транспортному средству, и
отменяет определение того, что другое транспортное средство было обнаружено, после определения того, что другое транспортное средство движется впереди рассматриваемого транспортного средства и расстояние между рассматриваемым транспортным средством и другим транспортным средством больше или равно заданному расстоянию в направлении движения рассматриваемого транспортного средства.
6. Способ управления вождением по любому из пп. 1-5, в котором процессор отменяет определение того, что другое транспортное средство было обнаружено, после определения того, что другое транспортное средство является двухколесным транспортным средством.
7. Способ управления вождением по любому из пп. 1-6, в котором
процессор выводит информацию о смене полосы движения на устройство вывода, предлагая выполнить управление сменой полосы после определения, что управление сменой полосы движения может быть выполнено, и
процессор выводит команду на устройство управления вождением для выполнения управления сменой полосы движения после того, как инструкция на выполнение управления сменой полосы движения вводится в устройство ввода на основании информации о смене полосы движения.
8. Способ управления вождением по любому из пп. 1-6, в котором процессор выводит команду на устройство управления вождением для выполнения управления сменой полосы движения после определения того, что управление сменой полосы движения может быть выполнено.
9. Способ управления вождением по любому из пп. 1-8, в котором процессор выводит команду на устройство управления вождением, чтобы запретить выполнение управления сменой полосы движения, после определения того, что другое транспортное средство не обнаружено в пределах заданной зоны обнаружения.
10. Способ управления вождением по п. 1, в котором
процессор может переключаться между режимом вождения между первым режимом, который требует визуального мониторинга водителем окружающих условий рассматриваемого транспортного средства, и вторым режимом, который является автономным режимом вождения, в котором процессор выполняет мониторинг окружающих условий рассматриваемого транспортного средства,
процессор определяет, что управление сменой полосы движения с использованием второго режима может быть выполнено после определения того, что другое транспортное средство было обнаружено в пределах заданной зоны обнаружения, и
процессор определяет, что управление сменой полосы движения с использованием второго режима не может быть выполнено, и устанавливает режим вождения в первый режим после определения того, что другое транспортное средство не было обнаружено в пределах заданной зоны обнаружения.
11. Способ управления вождением по п. 10, в котором
первый режим представляет собой режим с активным участием, в котором управление рулевым управлением с помощью процессора не работает, когда водитель рассматриваемого транспортного средства не держит рулевое колесо, и
второй режим представляет собой режим без активного участия, в котором управление рулевым управлением с помощью процессора работает, даже если руки водителя не касаются рулевого колеса.
12. Способ управления вождением по любому из пп. 1-11, в котором
процессор
определяет, есть ли на второй полосе движения необходимое место для рассматриваемого транспортного средства для выполнения смены полосы движения, и
выдает команду устройству управления вождением запретить выполнение управления сменой полосы движения после определения того, что место недоступно.
13. Способ управления вождением по п. 1, в котором
процессор выводит информацию о смене полосы движения на устройство вывода, предлагая, что может быть выполнено управление сменой полосы движения с использованием первого режима, которое может быть выполнено при определении управления сменой полосы движения, в то время как рассматриваемое транспортное средство движется во втором режиме.
14. Устройство управления вождением, содержащее:
процессор, который управляет скоростью и рулевым управлением рассматриваемого транспортного средства, движущегося по первой полосе движения в автономном режиме вождения, чтобы предписывать рассматриваемому транспортному средству автономную смену полосы движения с первой полосы движения на смежную вторую полосу движения, и
блок обнаружения других транспортных средств, который обнаруживает другое транспортное средство, движущееся по второй полосе движения, при этом
процессор
определяет, обнаружено ли другое транспортное средство, движущееся в пределах заданной зоны обнаружения на второй полосе движения, на основе результата обнаружения,
причем управление сменой полосы движения на смежную полосу движения выполняется, если обнаружено другое транспортное средство, движущееся в смежной полосе движения,
управление сменой полосы движения не выполняется, если другое транспортное средство не обнаружено, причем
управление сменой полосы движения выполняется впереди другого транспортного средства, обнаруженного позади рассматриваемого транспортного средства.
| JP 2019107996 A, 04.07.2019 | |||
| JP H11250396 A, 17.09.1999 | |||
| WO 2019142284 Al, 25.07.2019 | |||
| JP 2017133893 A, 03.08.2017. |

