Изобретение относится к тренажерам пилотируемых космических аппаратов, оборудованных электронными системами отображения и оптическими средствами наблюдения, и может быть использовано для развлекательных и познавательных целей с целью развития навыков управления космическим кораблем «Союз».
Известна конструкция кресла пилотажного тренажера с имитаторами вибраций и ударов (патент РФ №2555053, дата публикации 10.07.2015 г.), содержащая основание сиденья, стойки которого установлены на демпфирующих опорах, механизмы возбуждения вибрации и ударов и акустическую систему, где используется штатное кресло, а механизм возбуждения вибрации и ударов представляет собой коммерческий музыкальный сабвуфер, установленный в ящике, выходное отверстие которого закрыто резиновой мембраной, к которой прикреплен один конец тяги, при этом второй конец тяги закреплен на штатном кресле пилота.
Данная конструкция создает обстановки нахождения в кабине пилота космического корабля (вертолета и т.д.) за счет создания соответствия видимого изображения и реальных ощущений при этом (звук, толчки, удары). Такой подход позволяет погрузить пользователя в реальную обстановку полета.
Однако недостатками указанной конструкции являются ее ограниченные функциональные возможности, обусловленные статичностью положения кресла пользователя, что не позволяет полноценно прочувствовать ощущения, возникающие во время полета и специально спровоцированных ситуациях, в которых наблюдаются наклоны и перемещения кресла пользователя.
Известна конструкция симулятора пилотирования летательных аппаратов (патент РФ №130733, дата публикации 27.07.2013 г.), содержащая кабину с креслом пилота, органами управления движением, видеоустройством, раму тангажного вращения, основание со стойками, механизмы тангажного и осевого вращения, где кабина устанавливается внутри рамы тангажного вращения с возможностью поворота вокруг своей продольной оси, а сама рама устанавливается между стойками основания посредством двух подшипниковых узлов, рама тангажного вращения содержит вилку, соединенную с кабиной посредством подшипникового узла, выполненного на сайлент-блоках, и перпендикулярное плоскости вилки кольцо, которое охватывает кабину; снаружи кабины расположены по окружности, по крайней мере, три ролика, установленных с возможностью качения но упомянутому кольцу; и подшипниковые узлы стоек основания выполнены на сайлент-блоках. Также могут быть использованы дополнительные устройства, усиливающие полноту погружения: стереозвук, свет, напор воздуха, вибрации, охлаждение, нагрев и т.д. Тренажер для обучения пилотированию позволяет совершать управляемые неограниченные перемещения кабины: по крену (вправо, влево), по тангажу (вверх, вниз), вращение в обе стороны вокруг собственной оси. Перемещения могут совершаться раздельно или одновременно, что позволяет имитировать все элементы высшего пилотажа. Видеоустройство формирует для пользователя стерео (трехмерное) изображение, также имеются устройства, создающие различные дополнительные эффекты.
Однако указанная конструкция тангажа является сложной и громоздкой, занимающей отдельную значительную площадь. Кроме того, средства управления движением (панель управления) и кресло пользователя расположены внутри ограниченного пространства кабины без возможности их перемещения с учетом роста, габаритов и других субъективных особенностей пользователя (например, взрослый человек или ребенок), что приводит к ограничению функциональных возможностей рассмотренной конструкции симулятора.
Согласно патенту РФ №2367027 (дата публикации 10.09.2009 г.) известна конструкция тренажера пилотируемого космического корабля («Дон-Союз-ТМА», «Союз-ТМА»), принятая за наиболее близкий аналог к заявляемому решению, содержащая макет кабины спускаемого аппарата пилотируемого космического корабля и включающего телекамеру наблюдения, средства имитации связи «Борт-Земля», ручку управления движением, визир специальный космонавта, ручку управления ориентацией, акустическую систему, визуальные иллюминаторы, кресло борт-инженера, кресло командира корабля и кресло космонавта-исследователя, программный комплекс для визуализации полета и управления им.
Макет кабины представляет собой статичный корпус с закрепленными в нем статичными креслами членов экипажа, что не позволяет полноценно создать у пользователей реальность ощущений от полета космического корабля, что также свидетельствует об ограниченных функциональных возможностях конструкции.
Техническим результатом изобретения является расширение функциональных возможностей симуляторов полета космического корабля за счет создания компактной конструкции при одновременном обеспечении полноценных ощущений у пользователей, возникающих при полете космического корабля, с учетом их субъективных особенностей.
Технический результат достигается при использовании конструкции симулятора полета космического корабля, содержащей опорную конструкцию, направляющие, соединенные с опорной конструкцией, раму тангажа в форме полукруга, выполненную с возможностью перемещения по направляющим, кресло пользователя, соединенное с рамой тангажа, вертикальную опору, расположенную перед креслом пользователя, соединенную с рамой тангажа и имеющую стол с направляющими поступательного движения, в которых расположены ручки управления, пульт управления с боковыми мониторами, расположенный в верхней части вертикальной опоры, механизм перемещения рамы тангажа по направляющим, механизм вертикального перемещения пульта управления с боковыми мониторами вдоль вертикальной опоры, программно-аппаратный комплекс для визуализации полета и управления им, акустическую систему, вибромеханизм имитации акселерационных ощущений.
Все перечисленные элементы заявленного симулятора расположены в пределах опорной конструкции, что обеспечивает его компактность и удобство размещения. Наличие программного комплекса для визуализации полета и управления им, направляющих, по которым перемещается рама тангажа, акустической системы позволяет обеспечить ощущения, близкие к реальным, возникающие во время полета корабля. При этом наличие механизма вертикального перемещения пульта управления с боковыми мониторами позволяет создать условия для тренировки/обучения/игры для любого пользователя - ребенка или взрослого. Перечисленные преимущества позволяют получить изделие, которое может занять достойное место в линейке аналогичной продукции.
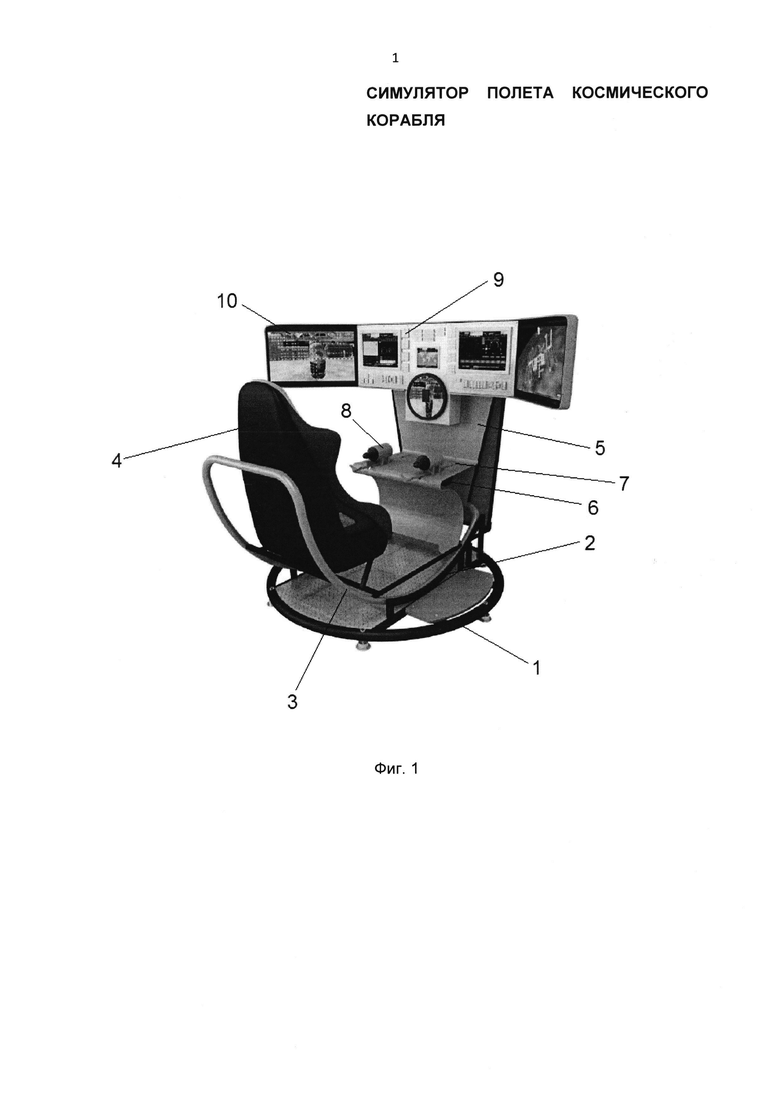
На фиг. 1 показан общий вид конструкции симулятора для полета космического корабля.
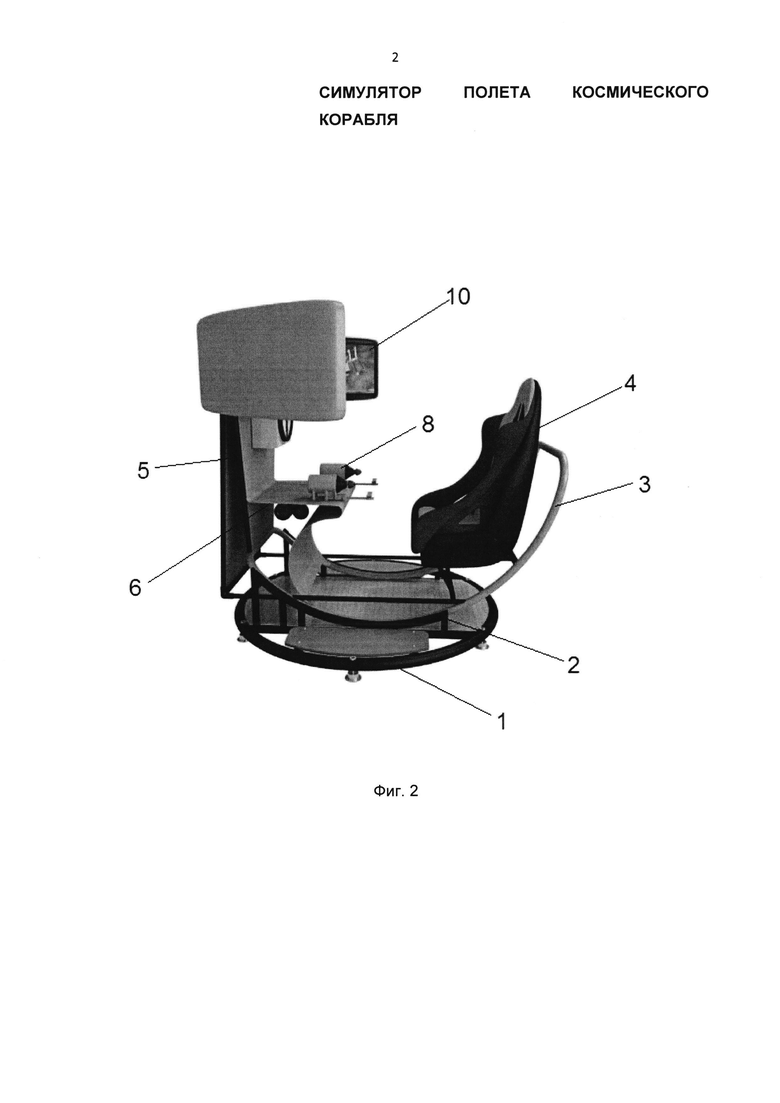
На фиг. 2 показан вид сбоку конструкции симулятора для полета космического корабля в исходном положении.
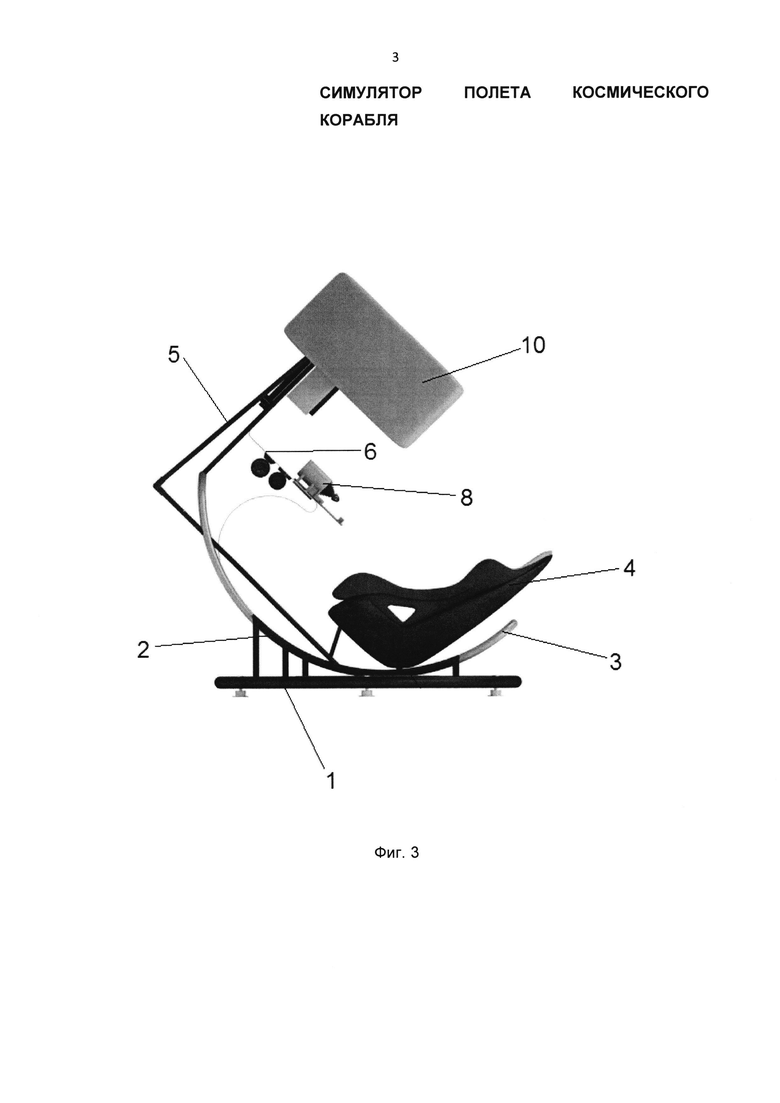
На фиг. 3 показан вид сбоку конструкции симулятора для полета космического корабля при имитации полета космического корабля.
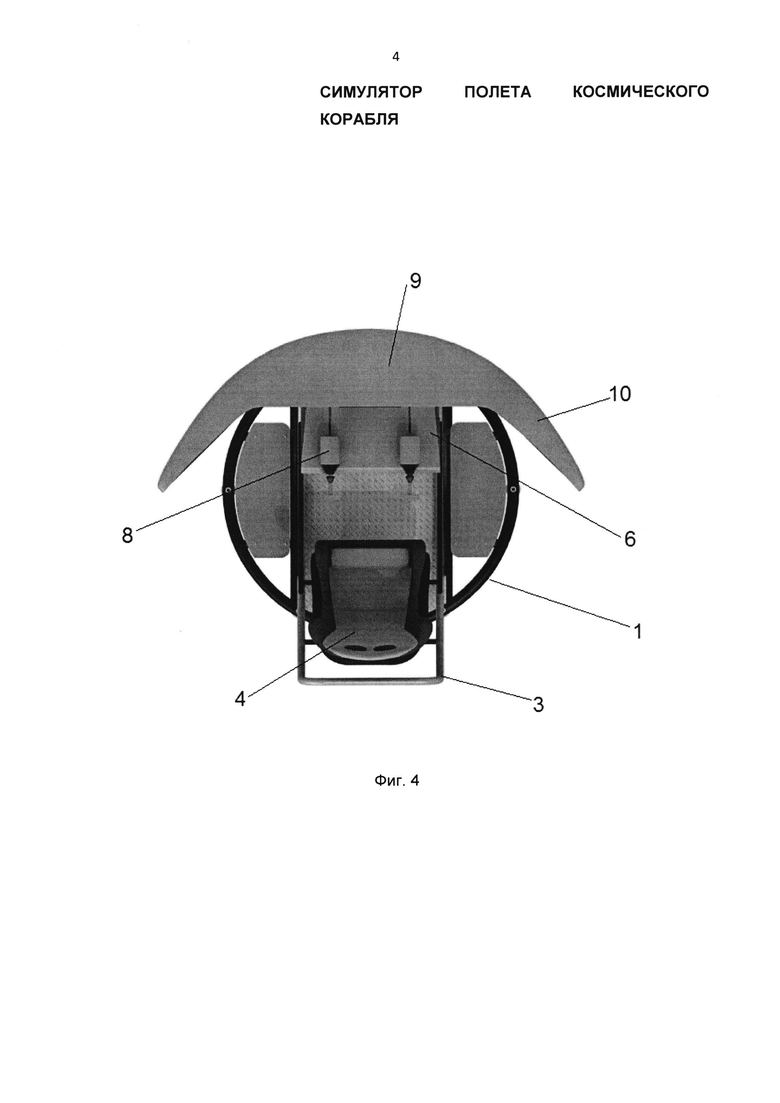
На фиг. 4 показан вид сверху конструкции симулятора для полета космического корабля.
Симулятор полета космического корабля содержит опорную конструкцию 1, направляющие 2, соединенные с опорной конструкцией 1, раму тангажа 3 в форме полукруга, выполненную с возможностью перемещения по направляющим 2, кресло пользователя 4, соединенное с рамой тангажа 3, вертикальную опору 5, расположенную перед креслом пользователя 4, соединенную с рамой тангажа 3 и имеющую стол 6 с направляющими поступательного движения 7, в которых расположены ручки управления 8, пульт управления 9 с боковыми мониторами 10, расположенный в верхней части вертикальной опоры 5, механизм перемещения рамы тангажа по направляющим (не показан), механизм вертикального перемещения пульта управления с боковыми мониторами вдоль вертикальной опоры (не показан), программно-аппаратный комплекс для визуализации полета и управления им (не показан), акустическую систему (не показана), вибромеханизм имитации акселерационных ощущений (не показан) (фиг. 1, 2, 3).
Опорная конструкция 1 выполнена из гнутого бесшовного трубчатого профиля в форме круга. Внутри нее устанавливается рифленый настил, ступени.
Рама тангажа 3 выполнена из гнутого бесшовного трубчатого профиля в форме полукруга.
Направляющая 2 представляет собой рельсовую криволинейную направляющую, в которой перемещается рама тангажа 3.
Механизм перемещения рамы тангажа по направляющим представляет собой канатный электропривод для перемещения рамы тангажа из исходного положения в рабочее и обратно в составе лебедки, канатно-блочной системы с устройствами предварительного натяжения. Указанные устройства расположены в нижней части опорной конструкции 1 под рифленым настилом. Также возможно использование актуатора вместо канатного электропривода с лебедкой для перемещения рамы тангажа, описанного выше.
Механизм вертикального перемещения пульта управления с боковыми мониторами вдоль вертикальной опоры 5 представляет собой электропривод (актуатор), который расположен внутри пульта управления 9 в его центральной части, соединенной с вертикальной опорой 5.
Стол 6 представляет собой металлическую поверхность с закрепленными направляющими поступательного движения 7.
Ручки управления 8 представляют собой ручку управления ориентацией корабля (РУО), ручку управления движением корабля (РУД). Также предусмотрена ручка управления спуском (РУС).
Вибромеханизм имитации акселерационных ощущений устанавливается под креслом пользователя и позволяет передать ощущения вибрации и толчков на разных этапах полета, сближения, стыковки, расстыковки, спуска и приземления.
Акустическая система представляет собой колонки с мини-сабвуфером, передающие близкие к реальным звуки при старте и полете космического корабля «Союз». Она расположена под металлическим столом 6, кабели при этом могут располагаться внутри пульта управления 9, а источники звука (динамики) могут быть вмонтированы в пульт управления 9.
Симулятор полета космического корабля «Союз» предназначен для использования в развлекательно-познавательных целях. Он может устанавливаться в технопарках, тематических и детских образовательных центрах, технических и тематических музеях, учебных заведениях, торгово-развлекательных комплексах и других предприятиях сферы досуга.
Во всех вариантах исполнения симулятора предусмотрена базовая версия ПО, которая включает в себя сближение с МКС с дальности 100 метров; возможность стыковки к различным стыковочным узлам станции; изменение времени суток и освещения; три уровня подготовки / навыков пользователя от «новичка» до «космонавта»; оценку результатов стыковки.
Минимальный возраст пользователя - 8 лет.
Количество пользователей единовременно - 1 человек.
Сложность программы полета может изменяться оператором симулятора путем выбора различных уровней подготовленности играющего, а также путем ввода нештатных ситуаций.
Программным обеспечением (ПО) предусмотрена возможность в любой момент полета сделать остановку/паузу с последующим возобновлением полета в соответствии с предварительно заданными условиями.
Боковые экраны служат для отображения корабля «Союз» на стартовом столе космодрома «Байконур»; видеообзора старта ракеты-носителя с кораблем «Союз» с космодрома Байконур, полета ракеты и корабля с отделением ступеней ракеты по мере их отработки и до момента выведения корабля «Союз» на орбиту Земли; визира специального космического для сближения и стыковки с МКС. Также боковые мониторы служат для отображения технической информации о состоянии корабля «Союз»; информации о режимах полета; отображения МКС в различных ракурсах в динамике; результатов успешных и неуспешных действий пользователей, связанных с управлением кораблем «Союз»; оценочной информации о результатах действий пользователя.
В местах размещения симулятора возможна установка экрана/экранов, на котором будет отображаться презентационный ролик с демонстрацией графики и возможностей симулятора, а также возможно дублирование изображения с боковых экранов симулятора.
Ниже приведена работа симулятора при создании различных режимов полета космического корабля.
При запуске демонстрационного режима на боковых экранах симулятора запускается процесс сближения корабля «Союз» с МКС с расстояния 800 метров, на панели управления отображается техническая информация о состоянии корабля; движущаяся карта Земли с мгновенным положением корабля на орбите относительно Земли.
При предстартовой подготовке пользователь садится в кресло, пристегивается ремнем безопасности и получает указания от инструктора. Этот этап может длиться неопределенное время, но до момента нажатия инструктором кнопки КЛЮЧ НА СТАРТ.
На боковых экранах отображается следующая информация:
- на левом боковом экране - камера кругового обзора стартового стола космодрома «Байконур». Период приблизительно 15-30 секунд (вид на стартовый стол и ракету на нем);
- на правом боковым экране - вид на стартовый стол с бортовой камеры (сверху вниз) (либо аналогично левому иллюминатору);
- на панели управления - отображение служебной информации состояния корабля; карта Земли.
Выведение корабля на орбиту начинается с приведения кресла пользователя в рабочее (игровое) положение, соответствующее положению космонавтов в реальном космическом корабле «Союз» перед стартом и в дальнейшем - до перехода в МКС, и нажатия инструктором кнопки КЛЮЧ НА СТАРТ.
После приведения кресла в рабочее (игровое) положение на боковых экранах появляется видео со стартующей ракетой со стартового стола, на мониторах пульта космонавтов транслируется динамическая техническая информация о состоянии корабля.
После старта ракеты-носителя в боковых иллюминаторах в ускоренном режиме пользователь (играющий) наблюдает все эволюции ракеты по мере выведения корабля на околоземную орбиту (отстрел мачты САС (Системы аварийного спасения), сброс головного обтекателя, включение - отключение двигателей, отделение ступеней ракеты, выведение корабля, раскрытие солнечных батарей и проч.).
В момент выведения корабля «Союз» на орбиту на экранах боковых иллюминаторов играющий видит Землю, Солнце, звездное небо, попеременно появляющиеся на боковых экранах симулятора.
Далее включается режим сближения с МКС и на боковых экранах появляется изображение корабля «Союз», движущегося по направлению к МКС. На панели управления транслируется динамичная техническая информация о состоянии корабля.
Если инструктором задана автоматическая стыковка, то игроку ничего не нужно делать, он лишь наслаждается картинкой полета и впоследствии - автоматической стыковкой.
В случае, если заданы сближение и стыковка в ручном режиме, то на дальности от МКС приблизительно 100 метров у корабля происходит нештатная ситуация (НшС) - сбой автоматики (с соответствующей сигнализацией), и играющий должен принять на себя управление сближением корабля и стыковкой с МКС.
Процесс сближения и стыковки может длиться неопределенное время и закончиться успешной стыковкой корабля «Союз» с МКС или отлетом корабля в космос, или же тем, что играющий «разобьет» корабль и станцию.
Маневрирование корабля «Союз» осуществляется с помощью ручек управления РУО и РУД.
В случае неудачной стыковки программой предусмотрено (по желанию играющего) выполнение процедуры отвода корабля, облета МКС и еще две попытки стыковки с понижением (или без) уровня сложности.
По окончании игровой сессии на боковых экранах отображаются результаты действий пользователя, связанных с управлением кораблем «Союз» и выводится оценочная информация о результатах действий пользователя.
После окончания тренировки/игры инструктор наживает кнопку СТОП и возвращает раму тангажа в исходное положение, отстегивает ремни безопасности, после чего пользователь может выйти из кресла.
Заявленная конструкции симулятора позволяет до начала тренировки/игры учесть индивидуальные особенности пользователя (рост, параметры тела и т.д.) и установить панель управления с боковыми экранами на таком уровне, чтобы пользователю было максимально удобно видеть изображения и управлять процессом имитационного полета. При этом все конструктивные элементы располагаются внутри опорной конструкции круглой формы, что свидетельствует о компактности симулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМОЦЕНТР | 2012 |
|
RU2505864C2 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2006 |
|
RU2326447C1 |
| АКВААЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2626418C2 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| Авиационный симулятор (авиасимулятор) самолета Boeing 737 | 2018 |
|
RU2688500C1 |
| РАКЕТНО-КОСМИЧЕСКАЯ СИСТЕМА | 1993 |
|
RU2087389C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| АЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2436715C2 |
| ПИЛОТИРУЕМЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ | 2001 |
|
RU2220077C2 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
Изобретение относится к тренажерам пилотируемых космических аппаратов, оборудованных электронными системами отображения и оптическими средствами наблюдения, и может быть использовано для развлекательных и познавательных целей с целью развития навыков управления космическим кораблем «Союз». Симулятор полета космического корабля представляет собой опорную конструкцию с направляющими и рамой тангажа в форме полукруга, выполненную с возможностью перемещения по направляющим. Вертикальная опора расположена перед креслом пользователя и соединена с рамой тангажа. Также опора имеет стол с направляющими поступательного движения. В направляющих расположены ручки управления, пульт управления с боковыми мониторами, расположенный в верхней части вертикальной опоры. Техническим результатом изобретения является расширение функциональных возможностей симуляторов космического полета. 4 ил.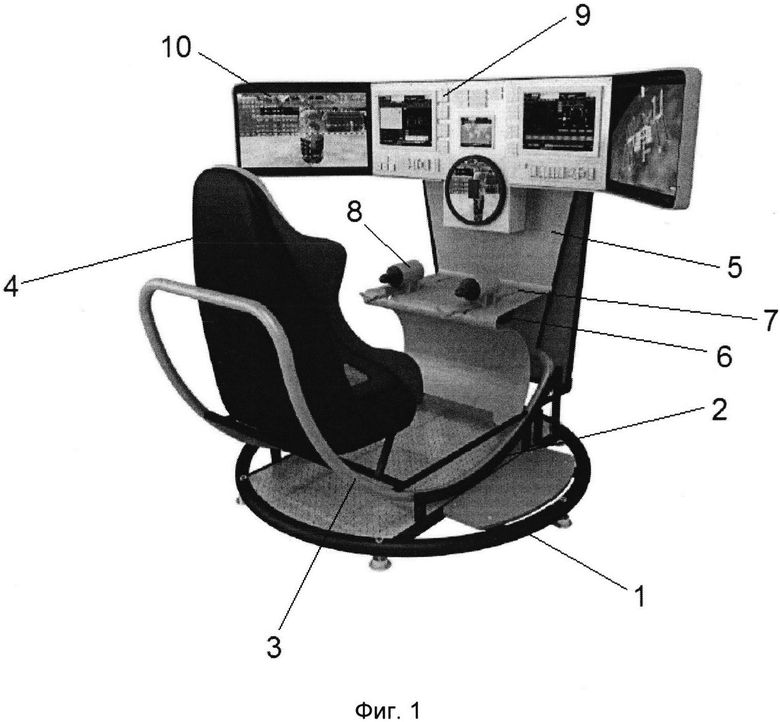
Симулятор полета космического корабля, характеризующийся тем, что содержит опорную конструкцию, направляющие, соединенные с опорной конструкцией, раму тангажа в форме полукруга, выполненную с возможностью перемещения по направляющим, кресло пользователя, соединенное с рамой тангажа, вертикальную опору, расположенную перед креслом пользователя, соединенную с рамой тангажа и имеющую стол с направляющими поступательного движения, в которых расположены ручки управления, пульт управления с боковыми мониторами, расположенный в верхней части вертикальной опоры, механизм перемещения рамы тангажа по направляющим, механизм вертикального перемещения пульта управления с боковыми мониторами вдоль вертикальной опоры, программно-аппаратный комплекс для визуализации полета и управления им, акустическую систему, вибромеханизм имитации акселерационных ощущений.
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПРОСТРАНСТВЕННОЙ ДЕЗОРИЕНТАЦИИ У ЧЕЛОВЕКА | 2010 |
|
RU2425667C1 |
| US 8298845 B2, 30.10.2012. | |||

