Изобретение относится к области космической техники и может применяться на тренажерах пилотируемых космических аппаратов (ПКА), оборудованных электронными системами отображения и оптическими средствами наблюдения.
Известно «Обучающее устройство», описанное как полезная модель - Патент №31671 на полезную модель от 20.08.2003 г. Авторы: А.Ф.Еремин и др. Данная полезная модель принимается за аналог. Приведенное обучающее устройство позволяет производить обучение космонавтов управлению космическим кораблем на участке спуска в атмосфере Земли в штатных и нештатных ситуациях за 1 минуту до включения тормозного двигателя в условиях физического воздействия перегрузки на космонавта.
Однако это «Обучающее устройство» не обеспечивает подготовку космонавтов к сквозному полету пилотируемого космического корабля (ПКА), включая все последовательные этапы полета: выведение, орбитальный полет, спуск с орбиты. Особые требования к подготовке космонавтов возникают в связи с большой физической и психологической нагрузкой, возникающей после перенесенных перегрузок на выведении, дальнейшее погружение в невесомость и выполнение в еще не адаптированных условиях ответственных режимов сближения и стыковки ТК «СОЮ3-ТМА» с международной космической станцией (МКС). После длительного пребывания в условиях невесомости на борту долговременной станции для экипажа процесс спуска и посадки транспортного корабля (ТК) является очень ответственным и сложным из-за большой физической и психологической нагрузки.
Наиболее близким к изобретению являются «Динамический тренажер», описанный как изобретение - Патент №2254617 от 21.06.2005 г. Авторы: Гаврик И.Н., Еремин А.Ф., Суворов А.П. и «Обучающее устройство», описанное как полезная модель - Патент №33451 от 20.10.2003 г. Авторы: Суворов А.П., Терехов В.В. и др. Изобретение - Патент №2254617 позволяет воспроизводить в земных условиях физическое воздействие перегрузки на космонавта при управлении космическим кораблем на участке спуска; обучающее устройство - Патент №33451 позволяет воспроизводить изображение Земли и МКС и передавать эти изображения в подвижную 3-степенную в карданном подвесе кабину «А» центрифуги ЦФ-18 на имитатор визира космонавта (ВСК). Однако в этих устройствах отсутствуют возможности воспроизвести условия полного, так называемого сквозного космического полета, начиная с выведения, с физическим воздействием перегрузки на космонавта; полета по орбите с выполнением управляемых режимов ориентации, сближения, причаливания, стыковки и расстыковки в условиях физического воздействия невесомости; и заключительного этапа полета - спуск с орбиты с физическим воздействием перегрузки.
Целью предлагаемого изобретения является обеспечение на динамическом тренажере управляемого спуска на базе центрифуги ЦФ-18 моделирование транспортного корабля «Союз-ТМА» на всех этапах пилотируемого полета в космос: выведения, орбитального полета с выполнением управляемых режимов ориентации, сближения, причаливания, стыковки и расстыковки, и заключительного этапа - спуска, в динамическом режиме работы тренажера с имитацией реальных физических воздействий на космонавта на всех перечисленных участках космического полета.
Поставленная цель достигается тем, что к наиболее близким к изобретению динамическому тренажеру и обучающему устройству, укрупненно содержащим пульт космонавта «Нептун-МЭ», модель системы управления бортовым комплексом, модель датчиков, модель движения космического корабля, ручку управления спуском (РУС), модель системы управления движением, модель системы исполнительных органов, пульт контроля и управления тренировкой, интерфейсный блок, генератор изображения Земли и станции МКС, маршрутизатор, контактные кольца, имитатор визира специального космонавта (ВСК), ручку управления ориентацией (РУО), ручку управления движением (РУД), пульт управления центрифугой, систему управления центрифугой, кабину «А» центрифуги, дополнительно вводятся блок выведения и система аварийного спасения (САС), блок управления перегрузкой, блок орбитального полета, блок управления невесомостью, полускафандр и система регулирования давления.
На фиг.1 представлена структурная схема изобретения.
На фиг.1 обозначены:
1 - пульт космонавта;
2 - модель системы управления бортовым комплексом;
3 - модель движения космического корабля;
4 - модель датчиков;
5 - ручка управления спуском (РУС);
6 - модель системы управления движением;
7 - модель исполнительных органов;
8 - пульт контроля и управления тренировкой.
9 - ручка управления ориентацией (РУО);
10 - интерфейсный блок;
11 - генератор изображения Земли и станции МКС;
12 - маршрутизатор;
13 - контактные кольца;
14 - имитатор визира специального космонавта (ВСК);
15 - ручка управления движением (РУД);
16 - пульт управления центрифугой;
17 - система управления центрифугой;
18 - кабина «А» центрифуги;
19 - блок выведения и система аварийного спасения (САС);
20 - блок управления перегрузкой;
21 - блок орбитального полета;
22 - блок управления невесомостью;
23 - полускафандр;
24 - система регулирования давлением.
Изобретение содержит модель движения 3, второй выход которой соединен с первым входом модели датчиков 4, третий выход которой соединен с первым входом модели системы управления движением 6, третий выход которой соединен с первым входом модели системы исполнительных органов 7, второй выход которой соединен с третьим входом модели движения космического корабля 3, первый выход которой соединен с первым входом пульта космонавта 1, второй выход которого соединен с первым входом модели системы управления бортовым комплексом 2, которая вторым вводом соединена с параллельно соединенными со вторым входом модели датчиков 4, с четвертым входом модели системы управления движения 6, с третьим входом модели системы исполнительных органов 7, а ручка управления спуском 5 подключена ко второму входу модели системы управления движением 6. Третий выход пульта космонавта «Нептун-МЭ» 1 соединен с первым входом пульта контроля и управления тренировкой 8, второй выход которого соединен с третьим входом модели системы управления бортовым комплексом 2, а третий выход пульта контроля и управления тренировкой 8 соединен с четвертым входом модели движения космического корабля 3, пятый выход которой соединен с интерфейсным блоком 10, выход которого соединен с первым входом генератора изображения Земли и станции МКС 11, третий выход которого соединен с третьим входом маршрутизатора 12, первый выход которого соединен с входом контактных колец 13, выход которых соединен со входом имитатора ВСК 14, выход которого соединен с первым входом кабины «А» 18, а полускафандр 23 и система регулирования давлением 24 параллельно включены между третьим выходом пульта управления центрифуги 16 и третьим входом кабины «А» центрифуги 18, шестой выход пульта контроля и управления тренировкой 8 соединен с первым входом пульта управления центрифугой 16, второй выход которого соединен с третьим входом системы управления центрифуги 17, а четвертый выход модели системы управления бортовым комплексом 2 параллельно соединен с входом блока выведения и системы аварийного спасения (САС) 19 и с первым входом блока орбитального полета 21, второй выход которого соединен с четвертым входом модели датчиков 4, а третий выход блока орбитального полета 21 соединен с входом блока управления невесомости 22, выход блока выведения и системы аварийного спасения (САС) 19 соединен с входом блока управления перегрузкой 20, выход которого параллельно с выходом блока управления невесомостью 22 соединены с первым входом системы управления центрифугой 17, второй выход которой соединен со вторым входом кабины «А» центрифуги 18, а второй выход маршрутизатора 12 соединен с четвертым входом пульта контроля и управления тренировкой 8, пятый выход которого соединен со вторым входом генератора изображения Земли и станции МКС 11, ручка управления ориентацией (РУО) 9 соединена с пятым входом системы управления движением 6, шестой вход которой соединен с ручкой управления движением (РУД) 15.
Блок выведения и системы аварийного спасения (САС) 19 моделирует процесс выведения на орбиту транспортного корабля «Союз-ТМА» с космонавтом на борту с физическим воздействием перегрузки на космонавта. Блок выведения и системы аварийного спасения (САС) состоит из модели движения ракеты-носителя, модели системы управления ракетой и модели системы аварийного спасения. Определение параметров движения ракеты-носителя на участке выведения производится интегрированием дифференциальных уравнений движения центра масс ракеты-носителя. Уравнения движения ракеты-носителя записываются в стартовой системе координат О xcyczc. Кроме стартовой системы координат используется связанная система координат О x1y1z1 и гироскопическая система координат О xгyгzг для учета угловой ориентации программного положения оси ракеты, задаваемой гироскопическими приборами системы управления.
Система дифференциальных уравнений ракеты-носителя на участке выведения в связанной системе координат имеет вид [3]:
С=А·В,
Fx1=P+X1+Rx упр;
Fy1=Y1+Ry упр;
Fz1=Z1+Rz упр;
где: wx1, wy1, wz1, wхг, wуг, wzг - проекции кажущегося ускорения на оси связанной (О х1y1z1) и гироскопической (O xгyгzг) систем координат,
V, Vх, Vy, Vz - модуль вектора скорости и его проекции на оси стартовой системы координат,
С - матрица направляющих косинусов осей связанной системы координат в стартовой,
А - матрица направляющих косинусов осей связанной системы координат в гироскопической,
В - матрица направляющих косинусов осей гироскопической системы координат в стартовой.
m - текущее значение массы ракеты-носителя,
 - заданный закон изменения расхода массы,
- заданный закон изменения расхода массы,
g - ускорение силы тяжести,
Р - суммарная тяга основных двигателей ракеты-носителя,

с - скорость истечения газов из сопла двигателя,
 - секундный расход массы,
- секундный расход массы,
ΔS - высотная добавка,
X1, Y1, Z1 - проекции суммарного вектора аэродинамической силы Rупр(qi); на оси связанной системы координат:
X1=Сx1(М,Н)Dπ(Н)М2,
Y1=Сα y1(М,Н)Dπ(Н)М2α,
Z1=Сρ z1(М,Н)Dπ(Н)М2 ρ.
Сx1, Сα y1, Сρ z1 - аэродинамические коэффициенты, зависящие от высоты и числа Маха,
Н - высота полета ракеты-носителя,
М - число Маха,
D - постоянная величина, зависящая от миделя ракеты-носителя,
π(Н) выбирается в соответствии с принятой моделью атмосферы Земли,
α, ρ - угол атаки и скольжения,
Rx упр, Rу упр, Rz упр - проекции суммарного вектора управляющих сил R(q) на оси связанной системы координат.
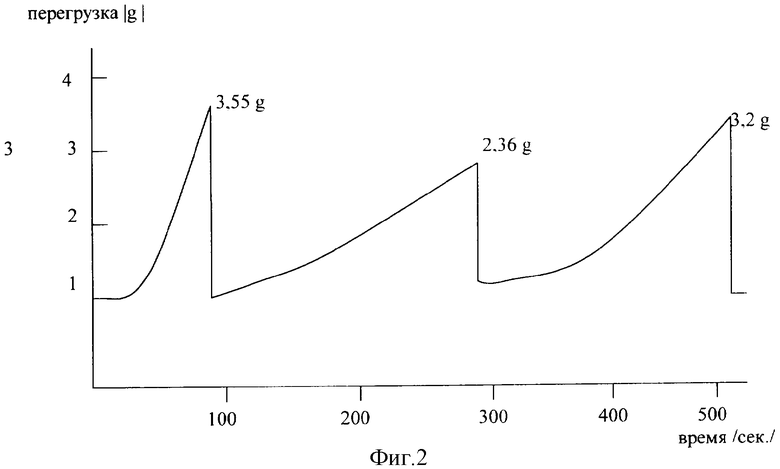
Примерный характер изменения продольной перегрузки, полученный при интегрировании дифференциальных уравнений движения ракеты-носителя на выведении корабля «Союз-ТМА», приведен на фиг.2.
Вычисленная в модели выведения перегрузка поступает в систему управления центрифуги, которая в соответствии с алгоритмами управления приводами вращения консоли центрифуги и установки подвижного подвеса кабины в соответствующее положение, создает заданную перегрузку на космонавта в режиме выведения транспортного корабля «Союз-ТМА» на орбиту.
Алгоритмы управления центрифугой при выведении ТК «Союз-ТМА», реализованные в блоке управления перегрузкой 20, имеют вид:
угловая скорость вращения консоли:

углы поворота карданного подвеса:
где R - радиус консоли центрифуги, g - нормальное ускорение, nx, ny, nz - заданные составляющие вектора перегрузки, ψ - программное угловое положение кольца, ϕ - программное угловое положение кабины, ωпрогр - программное значение угловой скорости консоли, ωтекущ - текущее значение угловой скорости консоли. Управление движением центра масс в процессе полета ракеты-носителя осуществляется по специально выбранным законам на основании показаний акселерометров, измеряющих кажущиеся ускорения, первый интеграл от которых вычисляется кажущеся скорость. Уравнение системы управления ракетой на выведении запишется в следующем виде:
F(qi,xi)=0;
где F - функция, описывающая закон управления,
qi - параметры определяющие величину управляющего усилия (углы поворота рулевых двигателей),
хi - параметры движения.
При выходе ракеты-носителя из штатного режима выведения (хтек≥хкрит) срабатывает система аварийного спасения (САС), которая отделяет спускаемый аппарат «Союз-ТМА» от ракеты-носителя и на парашюте производит посадку корабля на Землю, при моделировании на тренажере данной нештатной ситуации вращение центрифуги прекращается и кабина «А» центрифуги с космонавтом на рабочем месте возвращается в исходное положение.
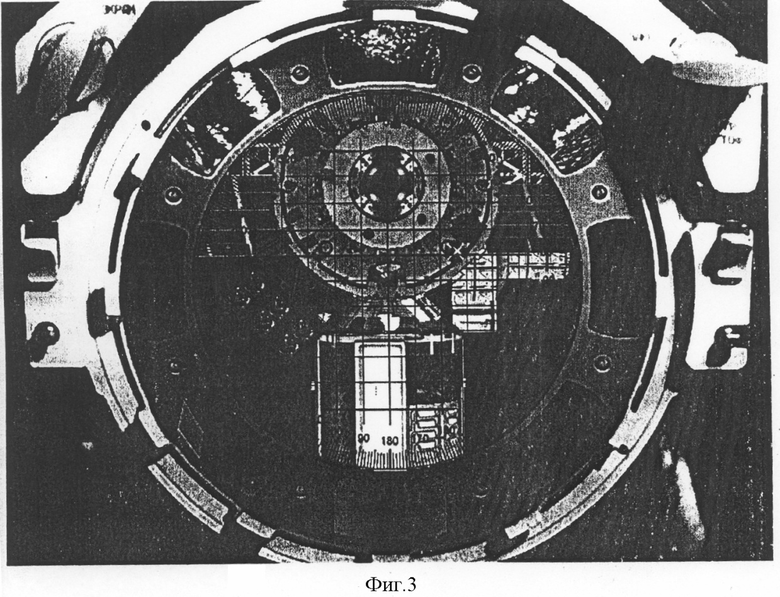
Блок орбитального полета 21 моделирует управляемый полет пилотируемого транспортного космического корабля «Союз-ТМА» в режимах: ориентации, сближения и причаливания с орбитальной станцией, стыковки и расстыковки от станции МКС в условиях воздействия невесомости на космонавта. В ручном режиме согласно бортовой документации космонавт выдает команды с пульта космонавта на организацию режимов ориентации и сближения транспортного корабля со станцией МКС и с помощью ручек РУО и РУД ведет управление кораблем, наблюдая изображение Земли и станции МКС в имитаторе визира космонавта (фиг.3), в условиях физического воздействия невесомости. В автоматическом режиме процесс ориентации и сближения осуществляются по командам бортового цифрового вычислителя. Основной характеристикой орбитального полета для космонавта является состояние невесомости, которое вносит существеные изменения в работу сердечно-сосудистой и вестибулярной систем человека, сенсорные и вегетативные расстройства, возникающие в первые часы и дни пребывания человека на орбите. Последовательное моделирование условий выведения на орбиту и орбитального полета осуществляется на динамическом тренажере, состоящем из центрифуги с управляемым карданным подвесом, кабины с регулируемым давлением воздуха и полускафандра.
Блок орбитального полета состоит из модели движения центра масс и вокруг центра масс транспортного корабля и станции МКС, системы управления ориентацией, сближением и причаливанием, модели радиотехнической системы сближения. Основными блоками модели движения станции МКС и транспортного корабля «Союз-ТМА» являются:
- блок интегрирования уравнений движения космического объекта,
- блок вычисления гравитационного ускорения,
- блок вычисления аэродинамического ускорения,
- блок вычисления ускорения от двигателей,
- блок описания параметров атмосферы.
Входной информацией для модели движения являются начальный вектор состояния в гринвичской системе координат, распределения случайных отклонений плотности атмосферы и случайных отклонений аэродинамических характеристик объекта, тяга двигателей, кватернион программного разворота, текущее московское время. Выходной информацией модели движения космического корабля являются текущий вектор состояния космического корабля в гринвичской системе координат, углы крена, рысканья и тангажа, угловые скорости по крену, рысканью и тангажу, текущая долгота, текущая географическая широта.
Основные уравнения движения космической станции МКС и космического транспортного корабля «Союз-ТМА» в векторной форме приведены ниже.
Движение центра масс:


где i=1,2, 1 - станция МКС, 2 - транспортный корабль «Союз-ТМА».
 - радиус-вектор объекта,
- радиус-вектор объекта,
 - вектор линейной скорости объекта,
- вектор линейной скорости объекта,
 - вектор гравитационного ускорения, обусловленного несферичностью Земли,
- вектор гравитационного ускорения, обусловленного несферичностью Земли,
Ω - вектор угловой скорости,
 - вектор тяги двигателей,
- вектор тяги двигателей,
 - вектор аэродинамической силы,
- вектор аэродинамической силы,
μ - гравитационная постоянная,
m - масса объекта.
Движение вокруг центра масс:

где i=1,2, 1 - станция МКС, 2 - транспортный корабль «Союз-ТМА».
 - вектор угловой скорости объекта,
- вектор угловой скорости объекта,
 - вектор моментов внешних сил,
- вектор моментов внешних сил,
 - тензор моментов инерции.
- тензор моментов инерции.
Вычисление относительных параметров МКС и ТК производится следующим образом:

где Δ1,2,3 - относительные параметры по дальности, скорости и угловой скорости между станцией МКС и транспортным кораблем «Союз-ТМА». Вычисленные относительные параметры поступают в модель радиотехнической системы, которая согласно алгоритмам, описывающим функционирование бортовой радиотехнической системы, ведет обработку поступающих текущих относительных параметров положения станции МКС и транспортного корабля «Союз-ТМА» и выдачу параметров в систему управления корабля и на пульт космонавта. Модель радиотехнической системы сближения имеет следующий вид:
где Nt - многомерный вектор навигационных параметров, включающий относительную дальность и скорость сближения и параметры угловой ориентации транспортного корабля «Союз-ТМА» и МКС в момент времени t,
It - совокупность информации об относительной дальности и скорости двух объектов и их угловой ориентации, поступающей на вход модели радиотехнической системы сближения из модели движения ТК «Союз-ТМА» и МКС,
М - совокупность известных геометрических параметров антенн радиотехнической системы сближения,
 - оператор, однозначно выражающий в момент времени t навигационное состояние Nt - транспортного корабля «Союз-ТМА» в соответствии с функционированием бортовой радиотехнической системы сближения.
- оператор, однозначно выражающий в момент времени t навигационное состояние Nt - транспортного корабля «Союз-ТМА» в соответствии с функционированием бортовой радиотехнической системы сближения.
Аналитическое описание модели системы управления орбитального полета, включая режимы ориентации, сближения, причаливания, представляется в форме множеств, состоящих из трех элементов [4]:
Т=<X, Y, S>,
где Х - множество входных параметров агрегатов вычислителя
 здесь N - количество агрегатов в модели цифрового вычислителя,
здесь N - количество агрегатов в модели цифрового вычислителя,
Y - множество выходных параметров агрегатов модели вычислителя

S - отображение вида S:Х→Y, называемое оператором сопряжения, ставящим в соответствие каждому входному параметру Х агрегата А некоторый выходной параметр Y агрегата А, связанный с ним элементарным каналом
Математическое описание модели агрегата представляется в виде следующего выражения:
P={X, Y, D, U, R(D), F(R), N},
где X, Y - множество входных и выходных параметров агрегата,
D={D, D, D} - множество промежуточных параметров,
U={U, U, U} - множество характеристик данных (признаков),
R(D)={R(D), R(D),... R(D)} - множество отношений на множестве элементарных данных (признаков),
N={N, N,... N} - множество экземпляров данных (признаков) в отношениях,
F(R)={F(R), F(R),... F(R)} - множество функциональных зависимостей между отношениями.
Характеристики элементарных данных (признаков) структуры могут быть заданы кортежем вида U = (<вид представления>, <диапазон изменения>, <значение>).
Переход агрегата из одного состояния в другое определяется поступлением входных сигналов, окончанием выполненной операции преобразования структур данных и типом события, возникшего по окончании операции.
Основной характеристикой орбитального полета для космонавта является состояние невесомости, которое вносит существеные изменения в работу сердечно-сосудистой и вестибулярной систем человека, сенсорные и вегетативные расстройства, возникающие в первые часы и дни пребывания человека на орбите. На тренажере воспроизводятся в течение длительного времени изменение системной гемодинамии и вестибулярные воздействия на организм, соответствующие аналогичным условиям в космосе. На центрифуге с управляемым карданным подвесом возможна имитация внутрилабиринтного сенсорного конфликта невесомости. Для этого в течение всего этапа имитации орбитального полета консоль центрифуги вращается с угловой скоростью:
ω=ω0+ω1Sin(2πυt),
где  υ=0,1-0,3 Гц,
υ=0,1-0,3 Гц,
а внешнее полукольцо и кабина поворачиваются по закону:

Благодоря этому алгоритму, реализованному в блоке управления невесомостью 22, в заданном диапозоне частот происходит изменение модуля и направления результирующего вектора перегрузки при сохранении его ориентации в системе координат, связанной с кабиной, строго ортогонально фронтальной плоскости космонавта.
Для моделирования перераспределения жидких сред в направлении к голове создается избыточное давление на нижнюю половину тела космонавта. Для этого используется полускафандр 23, сохраняющий внешнее давление воздуха в нем постоянным. Полускафандр представляет специальный костюм для моделирования факторов космического полета и включает следующие основные элементы: оболочку ног, мягкий пояс на ворсовке, плечевые ремни, регулятор расхода вентиляции, штуцер подсоединения шланга вентиляции, шланг вентиляции, датчик давления, штуцер подсоединения датчика давления, шланг подсоединения датчика давления. Что касается верхней части тела космонавта, то внешнее давление изменяется благодаря системе регулирования давления воздуха 24 в кабине «А» центрифуги, где находится рабочее место космонавта. Закон изменения давления воздуха в кабине «А» центрифуги определяется путем математического моделирования при перераспределении циркулирующей крови и экспериментальной проверки.
Таким образом, динамическая имитация орбитального полета заключается в имитации сенсорного конфликта невесомости и перераспределения циркулирующей крови. Естественно, что необходимым условием комплексного моделирования должно быть также моделирование реальной деятельности космонавта, которая вносит свою лепту в особенности развития и течения физиологических реакций на физические воздействия в полете, что и реализуется в полной мере на динамическом тренажере управляемого спуска на базе центрифуги ЦФ-18. Блоки 19, 20, 21, 22 выполнены на универсальных вычислителях типа Pentium-4.
Динамический тренажер управляемого спуска транспортного корабля «Союз ТМА» на базе центрифуги ЦФ-18 (Фиг.4) разработан и реализован в 2002 году в РГНИИ ЦПК им. Ю.А.Гагарина, и в настоящее время на нем проводятся обучение и подготовка космонавтов по международной программе МКС, а также доработка тренажера в части расширения функциональных возможностей тренажера, включая последовательное моделирование управляемых режимов полета с физическим воздействием факторов полета на космонавта: выведение, орбитальный полет, спуск корабля на Землю.
Источники информации
1. Патент №2254617 РФ, 7 МКИ G09В 9/16, 2005 г. Динамический тренажер. БИПМ №17, 2005 г.
2. Патент №33451 РФ, 7 МКИ G09B 9/16, 2003 г. Обучающее устройство. БИПМ №29, 2003 г.
3. Основы теории полета космических аппаратов. Под редакцией Г.С.Нариманова. М., Машиностроение, 1972 г.
4. Тренажерные комплексы и тренажеры. Технологии разработки и опыт эксплуатации. Под редакцией В.Е.Шукшунова. М., Машиностроение, 2005 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ КОСМОНАВТОВ | 2015 |
|
RU2578644C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| КОСМОЦЕНТР | 2012 |
|
RU2505864C2 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ОРБИТАЛЬНОГО УЗЛОВОГО МОДУЛЯ РОССИЙСКОГО СЕГМЕНТА МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ СТАНЦИИ | 2012 |
|
RU2506647C1 |
| СИМУЛЯТОР ПОЛЕТА КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2653448C1 |
| ТРЕНАЖЕР ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ КОСМОНАВТОВ | 2012 |
|
RU2506648C1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЁР ДЛЯ КОСМОНАВТОВ | 2013 |
|
RU2534474C2 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| ИНТЕГРИРОВАННЫЙ УЧЕБНО-ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ РОССИЙСКИХ ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2559872C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ | 2006 |
|
RU2325706C1 |
Изобретение относится к области космической техники и может быть использовано в тренажерах пилотируемых космических аппаратов. Устройство содержит пульт космонавта, модель системы управления бортовым комплексом, модель датчиков, модель движения космического корабля, ручку управления спуском (РУС), модель системы управления движением, модель системы исполнительных органов, пульт контроля и управления тренировкой, интерфейсный блок, генератор изображения Земли и станции МКС, маршрутизатор, контактные кольца, имитатор визира специального космонавта (ВСК), ручку управления ориентацией (РУО), ручку управления движением (РУД), пульт управления центрифугой, систему управления центрифугой, кабину центрифуги. Дополнительно вводятся блок выведения и система аварийного спасения (САС), блок управления перегрузкой, блок орбитального полета, блок управления невесомостью, полускафандр, система регулирования давления. Технический результат заключается в возможности обеспечения обучения и тренировок космонавтов управлению транспортным кораблем на всех этапах пилотируемого полета в космос. 4 ил.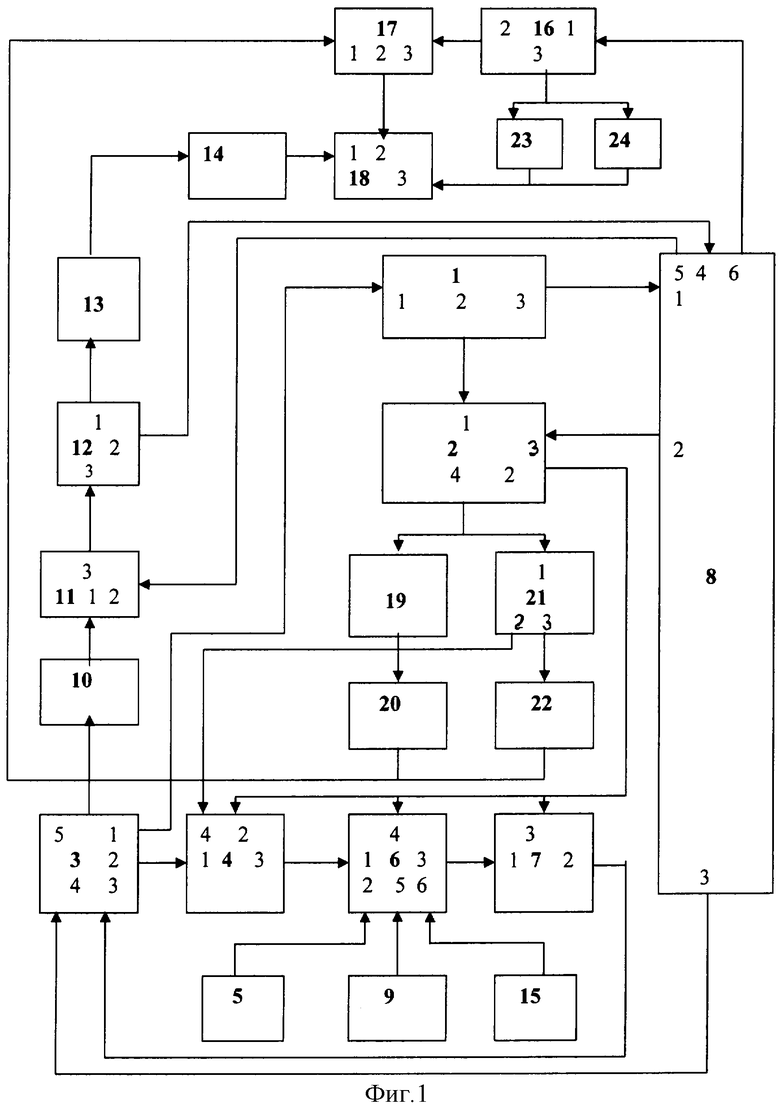
Динамический тренажер, содержащий пульт космонавта, модель системы управления бортовым комплексом, модель датчиков, ручку управления спуском (РУС), модель системы управления движением, модель системы исполнительных органов, пульт контроля и управления тренировкой, интерфейсный блок, генератор изображения Земли и станции МКС, маршрутизатор, контактные кольца, имитатор визира специального космонавта (ВСК), ручку управления ориентацией (РУО), ручку управления движением (РУД), пульт управления центрифугой, систему управления центрифугой, кабину «А» центрифуги, модель движения космического корабля, второй выход которой соединен с первым входом модели датчиков, третий выход которой соединен с первым входом модели системы управления движением, третий выход которой соединен с первым входом модели системы исполнительных органов, второй выход которой соединен с третьим входом модели движения космического корабля, первый выход которой соединен с первым входом пульта космонавта, второй выход которого соединен с первым входом модели системы управления бортовым комплексом, которая вторым выходом соединена с параллельно соединенными со вторым входом модели датчиков, с четвертым входом модели системы управления движения, с третьим входом модели системы исполнительных органов, а ручка управления спуском (РУС) подключена ко второму входу модели системы управления движением, пятый вход которой соединен с ручкой управления ориентацией (РУО), шестой вход системы управления движением соединен с ручкой управления движением (РУД), третий выход пульта космонавта соединен с первым входом пульта контроля и управления тренировкой, второй выход которого соединен с третьим входом модели системы управления бортовым комплексом, а третий выход пульта контроля и управления тренировкой соединен с четвертым входом модели движения космического корабля, пятый выход которой соединен с интерфейсным блоком, выход которого соединен с первым входом генератора изображения Земли и станции МКС, третий выход которого соединен с третьим входом маршрутизатора, первый выход которого соединен с входом контактных колец, выход которых соединен со входом имитатора визира специального космонавта (ВСК), выход которого соединен с первым входом кабины «А» центрифуги, шестой выход пульта контроля и управления тренировкой соединен с первым входом пульта управления центрифугой, второй выход которого соединен с третьим входом системы управления центрифуги, второй выход которой соединен со вторым входом кабины «А» центрифуги, а второй выход маршрутизатора соединен с четвертым входом пульта контроля и управления тренировкой, пятый выход которого соединен со вторым входом генератора изображения Земли и станции МКС, отличающийся тем, что дополнительно введены блок выведения и система аварийного спасения (САС), блок управления перегрузкой, блок орбитального полета, блок управления невесомостью, полускафандр и система регулирования давления, которая параллельно с полускафандром соединена между третьим выходом пульта управления центрифуги и третьим входом кабины «А» центрифуги, а четвертый выход модели системы управления бортовым комплексом параллельно соединен с входом блока выведения и системы аварийного спасения (САС) и с первым входом блока орбитального полета, второй выход которого соединен с четвертым входом модели датчиков, а третий выход блока орбитального полета соединен с входом блока управления невесомостью, выход блока выведения и системы аварийного спасения (САС) соединен с входом блока управления перегрузкой, выход которого параллельно с выходом блока управления невесомостью соединены с первым входом системы управления центрифугой.
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| Способ сушки материалов | 1931 |
|
SU33451A1 |
| SU 1360443 A1, 20.01.1996 | |||
| US 3732630 A, 15.05.1973 | |||
| DE 19640730 A1, 09.04.1998. | |||

