Заявленное изобретение относится к области управления динамическими испытательными стендами-тренажерами для имитации движущихся средств: от летательных аппаратов до наземного железнодорожного (ж/д) и автомобильного транспорта, плавающих и прочих динамических средств и может быть применено для физиологических исследований переносимости человеческим организмом различного рода перегрузок и тренировок, а также для проведения испытаний на функционирование техники при воздействии как макро- (центрифуги с большим радиусом вращения до десятков метров), так и микро- (широкополосных случайных вибраций и прочих быстроизменяющихся ускорений с амплитудами до единиц миллиметра) динамических нагрузок.
С созданием огромного количества разнообразных машин и механизмов, в том числе управляемых искусственным интеллектом, огромную значимость получили симуляторы [Симуляторы. Сайт: Виртуальная лаборатория. - http://ru/vlab/wikia/com/wiki/Симулятор]. Это программные и аппаратные средства, создающие впечатление действительности, отображая часть реальных явлений и свойств в виртуальной среде. Аппаратной основой таких симуляторов являются динамические платформы, состоящие из актуаторов - движущихся механизмов, приводимых в движение электродинамическими генераторами, шаговыми двигателями и т.п., управляемых микропроцессорной техникой. На их базе создаются учебно-тренировочные модули и тренажеры для авто-, авиа-, ж/д- и других симуляторов. В зависимости от степени свободы: углов наклона и смещения осей, поворота вокруг осей они могут передавать ощущения динамики, возникающие во время движения на различных транспортных средствах.
Известны испытательные вибрационные устройства (вибростенды) на основе электродинамических шейкеров (генераторов, актуаторов), виброгенераторов [ООО «РОСТЕХ». Установки испытательные вибрационные электродинамические (вибростенды) тип ВСВ. Сайт: http://www.rosteh.ru/catalog/products/electrodynamic-vibration-test-setup-shakers/66/28/1. Они также способны имитировать такие механические воздействия, как транспортная тряска, удары, гармонические колебания, и используются для испытаний изделий электроники, авиа- и космического приборостроения, и т.п. Сопряжение нескольких актуаторов позволяет генерировать колебания по двум или трем осям координат, а профили воздействий (акселерограммы) могут быть реализованы практически для любых форм: колебаний (далее по тексту - орбитальные колебания). На их основе промышленно изготовляются разнообразные выброплатформы с возвратно-поступательным вращательным движением платформы, такие как 3D-шейкеры и ротаторы, орбитальные шейкеры и рокеры, вертексы, качалки, встряхиватели и т.п. (далее по тексту ротаторы). Такие устройства входят в параметрический ряд унифицированных виброустановок; построены по модульному принципу с использованием микропроцессорной техники. Компьютерное управление виброустановками позволяет проводить испытания изделий на воздействие синусоидальной, широкополосной случайной вибрации и создание на подвижной платформе (технологической выброплощадке, столе вибратора) стандартных ударов (полусинус, треугольник, трапеция, прямоугольник и т.п.).
Для моделирования вибрационных нагрузок в работе [Патент RU №2249253. Кл. G09B 9/08. Кресло пилотажного тренажера с имитаторами вибраций и шума. Елисеев А.В. (BY). Заявка: от 19.12.2002] предлагается кресло пилотажного тренажера с имитаторами вибраций и шума, в основание сидения которого вмонтирован динамик диффузором (излучателем акустических колебаний), направленным в сторону сиденья. Замкнутый объем между диффузором динамика и сиденьем служит акустическим резонатором, преобразуя акустические волны в механические колебания сиденья. Электрический сигнал, формируемый компьютером, поступает на динамик и совместно с акустическим резонатором преобразует его в вибрацию. Такое устройство в зависимости от частотного спектра электрического сигнала может формировать и вибрации, и шумовые (звуковые) эффекты. Его основными недостатками являются невозможность обеспечить заданные управляемые по координатам (трехмерные) микродинамические нагрузки (вибрации) и высокая чувствительность к внешним макродинамическим воздействиям. Последнее приводит к искажению параметров вибраций и в пределе к заклиниванию катушки диффузора динамика, вследствие его конструктивной особенности работы.
Недостатком таких симуляторов, вибростендов, кресел-тренажеров является невозможность формирования реальных макродинамических нагрузок.
Наиболее реалистичными системами, создающими настоящие динамические нагрузки, являются динамические испытательные стенды, реализованные на базе центрифуг, например ЦФ-7 или ЦФ-18 с радиусами вращения 7 и 18 метров соответственно (далее ЦФ), использующиеся в Научно-исследовательском испытательном центре подготовки космонавтов имени Ю.А. Гагарина, для физиологических исследований переносимости человеческим организмом различного рода перегрузок и тренировок летчиков, космонавтов в условиях регулируемых по величине и направлению перегрузок и изменяемого микроклимата (давление, температура, влажность и газовый состав) в кабине, а также для проведения испытаний на функционирование образцов техники при воздействии макродинамических нагрузок [Космические тренажеры. Этапы развития. Наумов Б.А., Шевченко Л.Е. Учебно-справочное пособие. РГ НИИ ЦПК им. Ю.А.Гагарина. - Звездный городок. 2008: Патент RU 2254617. Кл. G09B 9/10. Динамический тренажер. Гаврик И.Н. (RU). Еремин А.Ф. (RU). Суворов А.П. (RU): Патентообладатель: ФГУП НИИ авиационного оборудования (RU). Заявка №2003126510/28 от 02.09.2003].
Известен динамический тренажер на базе ЦФ-18 [Патент RU 2254617. Кл. G09B 9/10. Динамический тренажер. Гаврик И.Н. (RU), Еремин А.Ф. (RU), Суворов А.П. (RU): Патентообладатель: ФГУП НИИ авиационного оборудования (RU). Заявка №2003126510/28 от 02.09.2003]. Тренажер предназначен для подготовки экипажей пилотируемых космических аппаратов, отработки бортовой аппаратуры и методики обучения управлению транспортного корабля «СОЮ3-ТМА» на этапе спуска с орбиты. Принцип работы тренажера основан на комплексном управлении динамическим испытательным стендом с рабочего места оператора, находящегося в кабине - тренажере посредством введения обратных связей с блоками (пультом) управления ЦФ и системами управления движения и бортовым комплексом с учетом моделей движения космического корабля, включая имитаторы акселерационных ощущений [Космические тренажеры. Этапы развития. Наумов Б.А., Шевченко Л.Е. Учебно-справочное пособие. РГ НИИ ЦПК им. Ю.А.Гагарина. - Звездный городок. 2008].
Такой тренажер является узкоспециализированным (предназначен для летательных аппаратов) и не позволяет моделировать (имитировать) движение, например, ж/д транспорта, наземных или плавающих средств. Для этого требуются специализированные подвижные платформы с определенной комбинацией (по количеству и расположению) актуаторов, с максимальной точностью воспроизводящие все физические особенности машин и механизмов заданной тематической области и непредвиденных ситуаций при движении в средах с разными агрегатными состояниями, включая и модели движения, и имитаторы акселерационных ощущений. Например, при движении по железной дороге тряска может возникнуть как от стыков рельс, их волнистости, изгибов и т.п., так и от внешних природных воздействий. Повышение или понижение скорости движения ж/д состава создает условия, сопровождающиеся как ростом величины непогашенного ускорения, так и возникновением вибраций и прочих резонансных явлений, выше допустимых нормативных значений, что может привести как к изменению физиологического состояния пассажиров и членов локомотивных бригад, так и к поломкам подвижного состава, вплоть до его крушения [ГОСТ 31248-2004; ГОСТ 54434-2011 и др.]. Кроме того, имитатор акселерационных ощущений передает лишь ощущения вибрации, без возможности управления ее параметрами (вид, полоса частот, амплитуда и т.п.).
Известны способ создания изменяемого ускорения для имитации движения транспортного средства (варианты) и устройство для его осуществления (варианты) [Патент RU №2081458. Кл. G09B 9/00, G09B 9/08, Способ создания изменяемого ускорения для имитации движения транспортного средства (варианты) и устройство для его осуществления (варианты). Серебренников О.А., Мурынин А.В., Кулаков В.В. Заявка №95119284/11 от 16.11.1995]. Предлагается кабину разместить в двухстепенном подвесе ЦФ с возможностью ее перемещения по оси консоли; а для полноты ощущений реальности движения имитацию вибрации кабины осуществить посредством одностепенного вибропривода.
Наиболее близким по технической сущности и заявляемому результату является способ имитации перегрузок, действующих на организм человека в полете [Авторское свидетельство СССР № 1064783. Кл. G09B 9/08. Способ имитации перегрузок, действующих на организм человека в полете: Садовничий В.А., Александров В.В., Почкаев И.Н., Бурдин Б.В. SU 1360443]. Способ основан на воздействии на пилота сил: макродинамических радиальных нагрузок, создаваемых подвижными элементами центрифуги, такими как консоль (ω - движение), карданов подвес на конце консоли (β,γ - движения), кабина (α - движения) в кардановом подвесе: и микродинамических нагрузок, создаваемых быстроизменяющимися (вибро-) ускорениями подвижной платформы: WZ(t) - возвратно-поступательное движение вдоль вертикальной оси относительно основания кабины, а также возвратно-поступательного движения спинки кресла планарно подвижной платформе (продольно оси кабины - wX(t)). При этом параметр wX(t) зависит от WZ(t) и не может рассматриваться как независимая степень свободы. Следовательно, имитация быстроменяющихся ускорений посредством раздельных возвратно-поступательных перемещений сиденья WZ(t), жестко связанного с подвижной платформой, и спинки кресла wX(t) носит условный и субъективный характер, поскольку, с одной стороны, человек-испытатель является связующим звеном в системе сиденье - спинка кресла, с другой стороны, с т.з. реакции вестибулярной системы испытателя формируются его акселерационные ощущения. Такая имитация не обеспечивает адекватность моделирования микродинамических факторов и их влияния на объект или субъект при движении транспортного средства (при вращении на ЦФ). Кроме того, при испытаниях функционирования техники нагрузка будет определяться пятью составляющими при наличии шести исполнительных механизмов.
Наличие только одного возвратно-поступательного перемещения WZ(t) подвижной платформы вдоль вертикальной оси Z кабины ЦФ не позволяет генерировать заданные управляемые по координатам быстроизменяющиеся колебания, и, как следствие, невозможно проводить испытания на воздействие как широкополосных случайных вибраций, стандартных ударов, так и более сложных комбинированных орбитальных колебаний по разным осям.
Основным недостатком всех вышеуказанных известных способов и устройств - динамических стендов-тренажеров - является отсутствие управляемых быстроизменяющихся колебаний по трем осям с реализацией широкополосной случайной вибрации и разных профилей воздействий (акселерограмм) для любых форм от ударов (поликосинус, треугольник, трапеция, прямоугольник и т.п.) до орбитальных (круговых - вокруг осей X, Y, Z) колебаний, в том числе при комбинированном воздействии макродинамических нагрузок. Это ограничивает возможности использования ЦФ как для исследования переносимости человеческого организма, так и для проведения испытаний на функционирование образцов техники в разных тематических областях.
Заявленное изобретение предназначено для решения задачи расширения функциональных возможностей динамических испытательных стендов - центрифуг - и при ее осуществлении может быть получен следующий технический результат: генерация и модуляция управляемых быстроизменяющихся колебаний подвижной платформы: возвратно-поступательных WX(t), WY(t), WZ(t) и круговых орбитальных - Wα(t), Wβ(i), Wγ(t) по соответствующим осям X, У, Z c реализацией:
- широкополосной случайной и гармонической (на среднегеометрических частотах октавных полос от 2 до 2000 Гц является частным случаем широкополосной случайной вибрации при сохранении энергетического эквивалента воздействия вибрации при перерасчете (по определенным методикам) значений параметров широкополосной случайной вибрации в значения параметров гармонической вибрации. ГОСТ 24346-80. Вибрация. Термины и определения. ГОСТ 28988-91.) вибраций;
- разных профилей воздействий (акселерограмм) для любых форм от ударов (поликосинус, треугольник, трапеция, прямоугольник и т.п.) до орбитальных (круговых - вокруг осей X, Y, Z) колебаний,
при комбинированном воздействии макродинамических нагрузок.
Технический результат достигается тем, что в известном способе имитации перегрузок, действующих на организм человека в полете, и в устройстве для его реализации содержится: центральный пульт управления, моделирующий программно-аппаратными средствами различные сценарии, виды нагрузок и задающий движение: и раздельно управляемые: консоль ЦФ, карданов подвес с кольцом и вилкой на конце консоли, кабина в кардановом подвесе и расположенные в кабине: штатный испытательный стенд и подвижная платформа. При этом подвижная платформа имеет одну степень свободы с возвратно-поступательным перемещением WZ(t) вдоль вертикальной оси Z относительно основания кабины.
Признаками, отличающими изобретение от прототипа, являются: введение по меньшей мере двух актуаторов, блока управления актуаторами, акселерометра и автоматического регулятора уровня с образованием обратной связи между механическим движением подвижной платформы и формированием управляемых электрических сигналов блоком управления актуаторами, выходы которого электрически связаны с соответствующими актуаторами. При этом каждый актуатор, механически связанный с подвижной платформой, преобразует электрические сигналы в механические возвратно-поступательные движения WX(t), WY(t), WZ(t) ортогонально друг другу по планарным X, Y осям и вертикальной оси Z. Комбинация возвратно-поступательных движений заданная программно-аппаратными средствами и сформированная блоком управления актуаторами, модулирует быстроизменяющиеся колебания подвижной платформы (микродинамические нагрузки): от простейших одностепенных (по осям X, Y, Z) гармонических вибраций до широкополосных случайных вибраций, а также разных профилей воздействий для любых форм от ударов до орбитальных (круговых - вокруг осей X, У, Z) колебаний. Наличие обратной связи, образованной акселерометром (совокупностью нескольких акселерометров), механически связанным с подвижной платформой и электрически с автоматическим регулятором уровня, и соответственно, с блоком управления актуаторами, позволяет эффективно управлять (регулировать и стабилизировать) заданными микродинамическими нагрузками на подвижной платформе при одновременном влиянии (воздействии) на нее постоянных или изменяемых во времени макродинамических нагрузок (при постоянном или равно ускоренном/замедленном вращении ЦФ). То есть наличие обратной связи позволяет управлять сигналами, сформированными блоком управления актуаторами и поддерживать заданные с центрального пульта управления ЦФ микродинамические (вибро-) нагрузки в зависимости от изменяющихся макродинамических нагрузок (при вращении ЦФ).
В известных симуляторах и вибростендах для имитации на подвижной платформе микромеханических воздействий, таких как транспортная тряска, удары, широкополосные случайные воздействия или гармонические колебания, в испытательных вибрационных устройствах используется сопряжение нескольких программно-управляемых компьютером актуаторов [Симуляторы. Сайт: Виртуальная лаборатория. - http://ru.vlab.wikia.com/wiki/Симулятор: ООО «РОСТЕХ». Установки испытательные вибрационные электродинамические (вибростенды) тип ВСВ. Сайт: http://www.rosteh.ru/catalog/products/electrodynamic-vibration-test-setup-shakers/66/28/]. Однако отсутствие макродинамических нагрузок и их влияния на параметры микродинамических нагрузок и подвижность платформы не позволяет моделировать комбинированные акселерационные воздействия, приближенные к реальным.
Динамический испытательный стенд выполнен в кабине центрифуги ЦФ18 без изменений основных конструкций и эргономических свойств и центрифуги и кабины, и штатной испытательной платформы. При этом управление актуаторами (подвижной платформой ЦФ) с модуляцией быстроизменяющихся колебаний по трем осям (X, Y, Z) при комбинированном воздействии динамических нагрузок осуществляется блоком управления актуаторами: по первому входу - программно-аппаратными средствами центрального пульта управления ЦФ; по второму входу - автоматическим регулятором уровня микродинамических нагрузок, электрически связанного с акселерометром (акселерометрами), который механически связан с подвижной платформой и формирует электромеханическую обратную связь.
Полученный при осуществлении изобретения технический результат, а именно расширение функциональных возможностей центрифуги за счет генерации и модуляции управляемых быстроизменяющихся колебаний подвижной платформы по трем осям с реализацией широкополосных случайных и гармонических вибрации при комбинированном воздействии динамических нагрузок, достигается за счет того, что введены: по меньшей мере два актуатора, блок управления актуаторами, акселерометр и автоматический регулятор уровня, вход которого электрически связан с акселерометром, механически связанным с подвижной платформой, а его выход - со вторым входом блока управления актуаторами, первый вход которого связан электрически с выходом центрального пульта управления, а его выходы - с соответствующими актуаторами, генерирующими возвратно-поступательные движения ортогонально друг другу в планарных осях X, Y и вертикальной оси Z.
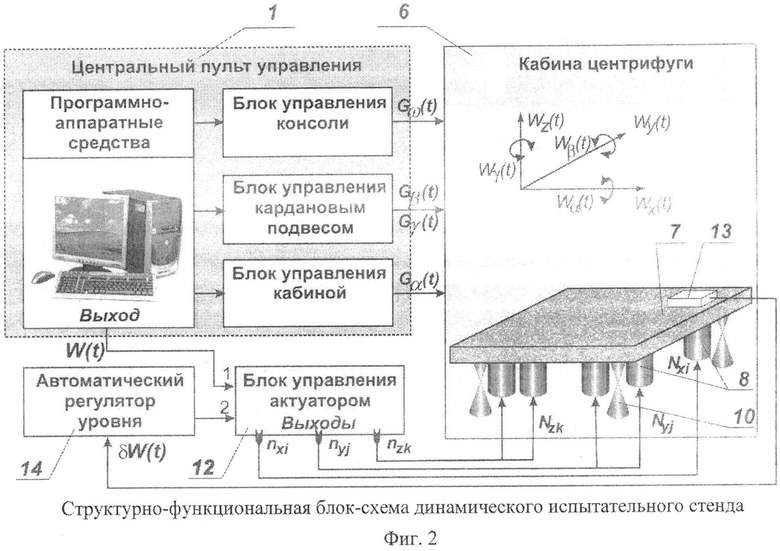
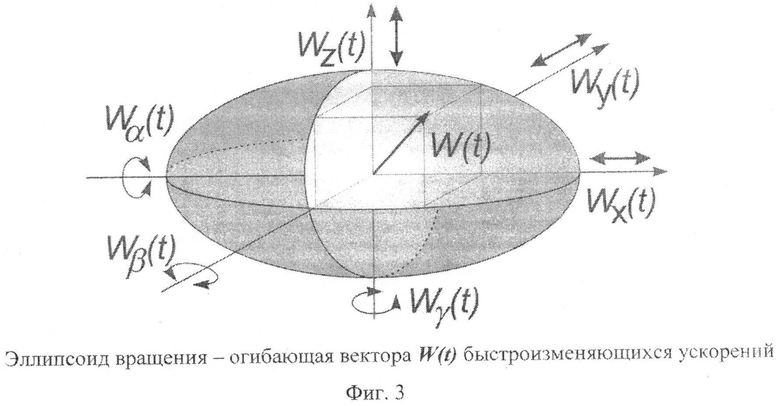
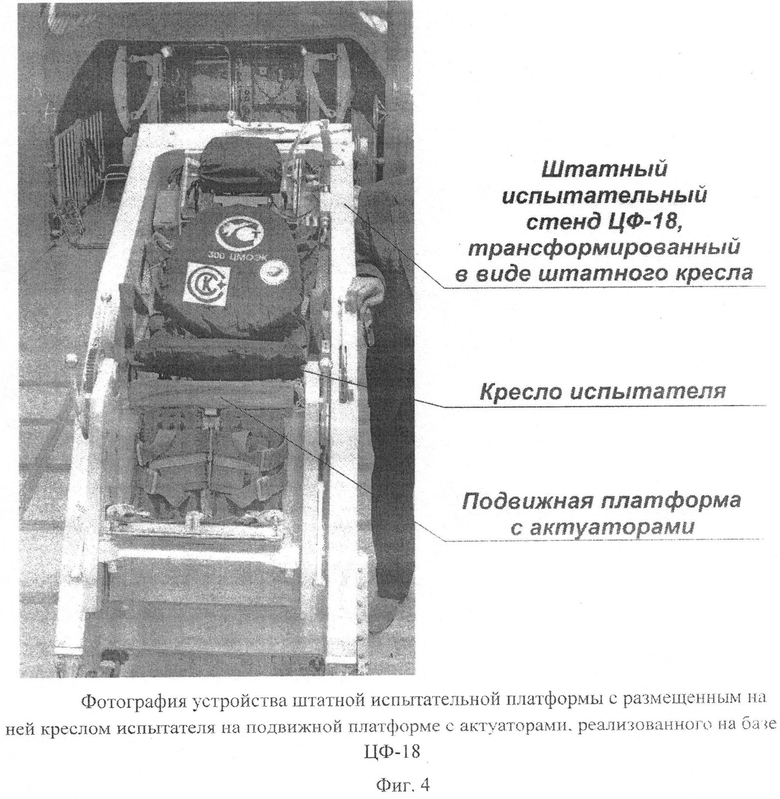
На фиг.1 изображен общий вид динамического испытательного стенда на базе ЦФ-18 с условным изображением кабины ЦФ (на вставке) и кинематической схемой устройства. На фиг.2 показана структурно-функциональная блок-схема динамического испытательного стенда. На фигурах обозначено: 1 - центральный пульт управления (ЦПУ), 2 - консоль центрифуги, 3 - карданов подвес с кольцом 4 и вилкой 5 на конце консоли, 6 - кабина в кардановом подвесе, 7 - подвижная платформа, 8 - актуаторы (электродинамические (вибро-) генераторы), 9 - основание кабины, 10 - виброопоры (виброподушки), 11 - штатный испытательный стенд с конструктивно-изменяемой конфигурацией, трансформируемый в виде штатной платформы или штатного креста (последнее показано штриховой линией на вставке фиг.1), 12 блок управления актуаторами, 13 - акселерометр (акселерометрический датчик), 14 - автоматический регулятор уровня (АРУ). На фиг.3 представлена диаграмма - огибающая вектора быстроизменяющихся ускорений W(t) в виде эллипсоида вращения, поясняющая принцип модуляции и формирования актуатором сложных комбинированных колебаний (орбитальных, вортексных, рокерных, и т.п.) по разным осям. На фиг.4 представлена фотография устройства штатной испытательной платформы с размещенным на ней креслом испытателя на подвижной платформе с актуаторами, реализованного на базе ЦФ-18.
Динамический испытательный стенд содержит (фиг.1 и 2): центральный пульт управления 1, моделирующий программно-аппаратными средствами различные сценарии, виды нагрузок и задающий движение; и раздельно управляемые консоль 2 центрифуги, карданов подвес 3 с внешним кольцом 4 и внутренним кольцом - вилкой 5 на конце консоли с кабиной 6 в кардановом подвесе; и расположенные в кабине подвижную платформу 7 с тремя и более актуаторами 8, расположенными определенным образом и генерирующими возвратно-поступательные движения ортогонально друг другу в планарных X, Y осях и вертикальной оси Z относительно основания 9 кабины, виброопоры 10 с тремя степенями свободы (X, У, Z); и расположенным на подвижной платформе 7 штатным испытательным стендом 11 с конструктивно-изменяемой конфигурацией, трансформируемым в виде штатной платформы или штатного кресла; а также блок 12 управления актуаторами, акселерометр 13 и АРУ 14.
Виброопоры 9 с тремя степенями свободы (X, Y, Z) - это опоры (система опор), имеющие большие статические сопротивления (несущие на себе большие весовые нагрузки) и малые динамические (в низкочастотном диапазоне работы виброгенераторов: 5÷2700 Гц) сопротивления. Такие виброопоры могут быть выполнены разными способами, например, от простейших виброизоляторов и трехстепенных подвесов до магнитных левитационных опор [Патент RU №2269704. Кл. F16F 15/02. Активная виброизолирующая опора. Белый Д.М. и Новикова О.Д. (RU). Заявка №2004128045/11 от 20.09.2004; Патент RU №2477399. Кл. F16F 6/00, F16F 15/03, F16C 32/04. Виброизолирующая магнитная опора. Чижик С.A. (BY), Гринчик Н.Н. (BY) и др. Заявка №2011136097/11 от 30.08.2011: Патент RU №2076961. Кл. F16F 1/08, F16F 6/00. Виброизолирующая опора. Гритчин A.A. (RU). Зуев А.К. (RU) и др. Заявка №9303839228 от 27.07.1993].
Кинематическая схема динамического испытательного стенда (фиг.1) имеет десять степеней свободы: четыре степени свободы при формировании динамических макронагрузок (Gω(t), Gγ(t), Gβ(t), Gα(t)) - вращение консоли в горизонтальной плоскости - одна степень (ω - движение), повороты вилки (γ - движение) и внешнего кольца (β - движение) карданова подвеса относительно своих осей - две степени и поворот кабины (α - движение) относительно своей оси - одна степень (ЦФ-18); и шесть степеней свободы при формировании динамических микро- (вибро-) нагрузок - возвратно-поступательных перемещений WX(t), WY(t), WZ(t) и радиально-осевых движений Wα(i), Wβ(t), Wγ(t) актуатора соответственно вдоль и вокруг X, Y и Z осей (фиг.3).
Подвижная платформа 7 представляет собой механически жесткую конструкцию, объединяющую все N актуаторы (Nxi, Nyj, Nzk, где i,j,k=1,2,…,N=∑(i+j+k)). Количество N актуаторов 8 и их расположение в платформе 7 может быть любым. В предлагаемом варианте их определенное положение соответствует генерации возвратно-поступательных движений ортогонально друг другу в планарных X, Y и Z осях. Каждый актуатор Nxi или Nyj или Nzk, преобразует электрические сигналы Uxi(t), Uyj(t) и Uzk(t) в механические возвратно-поступательные колебания соответственно WX(t), WY(t), и WZ(t). Наличие двух и более возвратно-поступательных колебаний модулирует круговые (орбитальные - Wα(t), Wβ(t) и Wγ(t)) колебания определенной амплитуды и частоты по соответствующим X, Y, Z осям подвижной платформы. Например: генерация актуаторов Nxi и Nyj в планарных осях X и Y модулирует (WX(t)≠0, WY(t)≠0, WZ(t)≠0 орбитальные колебания Wγ(t) вокруг Z оси; соответственно генерация актуаторов Nxi и Nzk (WX(t)≠0, WZ(t)≠0, WY(t)≠0) модулирует колебания Wβ(t) вокруг Y оси: генерация актуаторов Nyj и Nzk (WY(t)≠0, WZ(t)≠0, WX(T)≠0) генерирует колебания Wα(t) вокруг X оси. Генерация актуаторов Nxi, Nyj и Nzk по X, Y и Z осям (WX(t)≠0, WY(t)≠0, WZ(t)≠0) приводит к более сложным пространственным колебаниям, огибающая вектора W(t) которых условно показана эллипсоидом вращения на фиг.3. Таким образом, подвижная платформа 7 с актуаторами 8 выполняет функции мультиплексора механических колебаний. Количество актуаторов Nxi, Nyj и Nzk по каждой X, Y, Z оси определяется диапазоном частот и амплитудой формируемых колебаний и несущей нагрузкой (массогабаритными параметрами штатного испытательного стенда 11).
Подвижная платформа 7 может быть расположена как между основанием 9 кабины и штатным испытательным стендом, так и на рабочей поверхности штатного испытательного стенда. В этом случае рабочей поверхностью будет поверхность подвижной платформы 7. На фиг.4 представлена фотография штатного испытательного стенда, трансформированного в виде штатного кресла, на котором расположена подвижная платформа 7 с дополнительным на ней креслом испытателя.
Блок 12 управления актуаторами содержит n выходов, соответствующих N (n=N) актуаторам (Nxi, Nyi, Nzk), и формирует соответствующие им управляющие электрические сигналы Uxi(t), Uyj(t) и Uzk(t). При этом управление вибронагрузками на подвижной платформе, согласно общему сценарию, задается с выхода ЦПУ, электрически связанного с первым входом блока 12 управления актуаторами.
АРУ 14, совместно с акселерометром 13, механически связанным с подвижной платформой 7, формирует электрическую обратную связь через второй вход блока 12 управления актуаторами. Количество акселерометров и их расположение по плоскости подвижной платформы 7 может быть любым. Данный факт определяется тем, что макродинамическая нагрузка является векторной величиной и определяется суперпозицией всех макродинамических сил при вращении всех элементов ЦФ (поз.2-6, фиг.1) и по-разному воздействует на различные участки подвижной платформы 7 и, соответственно, на штатный испытательный стенд 11.
Динамический испытательный стенд работает следующим образом. На центральном пульте управления 1 (фиг.2) программно-аппаратными средствами задаются различные сценарии испытаний и виды нагрузок: макродинамических - G(t)=Gω(t), Gγ(t), Gβ(t), Gα(t); и микродинамических W(t)≡WX(t), WY(t), WZ(t), Wα(t), Wβ(t) и Wγ(t), воспроизводящие все физические особенности машин и механизмов заданной тематической области (например: авто-, ж/д-, авиа- или космический симулятор и т.п.). А также на ЦПУ формируются сопутствующие нагрузкам сценарии картин виртуального мира (окружающей среды, индикации и показаний приборов, и. т.п.), отображаемые на экранах или мониторах кабины - муляжах приборных панелей и иллюминаторов. При этом предполагается, что мониторы или телеэкраны, имитирующие панели приборов соответствующего транспортного средства или визуальную внешнюю (за пределами кабины) обстановку (среду) установлены на штатном испытательном стенде 11 вместе с креслом испытателя. Динамические макронагрузки G(t) формируются движением (ω) консоли 2, кардановых кольца (β) 4 и вилки (γ) 5 и кабины (α) 6, управляемых раздельно соответствующими блоками ЦПУ. Динамические микро- (вибро-) нагрузки W(t) формируются подвижной платформой 7 за счет соответствующей генерации актуаторов 8. По команде с ЦПУ, согласно общему сценарию, в блоке 12 управления актуатором программно-аппаратными средствами формируются электрические сигналы Uxi(t), Uyj(t) и Uzk(t), которые с его nxi nyj, nzk выходов подаются на соответствующие Nxi, Nyj, Nzk актуаторы, преобразуя электрические сигналы в механические колебания W(t). Мультиплицирование двух и более (сигналов) колебаний по двум или трем осям создают любые формы пространственно-временных колебаний (фиг.3). Следовательно, сопряжение нескольких актуаторов 8 в подвижной платформе и возможность генерации по двум или трем осям координат любых форм колебаний, позволяют реализовать любые профили воздействий (акселерограммы) - микродинамические нагрузки с возвратно-поступательным и (или) вращательным движением подвижной платформы 7: 3D-шейкеры, ротаторы, орбитальные шейкеры и рокеры, вертексы, качалки, встряхиватели и т.п.
При комбинированном воздействии макродинамических радиальных нагрузок Gω(t), Gγ(t), Gβ(t), Gα(t) на подвижную платформу 7, включая штатный испытательный стенд 11, вектор W(t) быстроизменяющихся (вибро) ускорений (фиг.3) будет претерпевать искажения δW(t) относительно ранее заданных акселерограмм. Сигнал об изменении профиля воздействия, заданного с ЦПУ, регистрируется акселерометром 13 и по цепи обратной связи подается на АРУ 14 вибронагрузки и далее на второй вход блока 12 управления актуатором. Таким образом, сравнивая исходный заданный с ЦПУ сигнал W(t) по формированию актуаторами 8 соответствующего профиля воздействия с реальным сигналом δW(t) с акселерометра 13, блоком 12 управления актуаторами совместно с автоматическим регулятором уровня 14 осуществляется коррекция вектора W(t) вибронагрузки и соответственно акселерограммы.
Поскольку нагрузки в любых точках актуатора, а также штатного испытательного стенда являются композицией как макро- Gω(t), Gγ(t), Gβ(t), Gα(t), так и микро- W(t) динамических нагрузок, т.е. в разных точках комбинированные нагрузки различны, то количество акселерометров, механически связанных с актуатором, и их расположение может быть любым (отличным от одного), в зависимости от решаемых задач. Следовательно, количество каналов обратной связи будет определяться количеством используемых акселерометров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФИЗИЧЕСКАЯ МОДЕЛЬ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2224295C2 |
| Стенд для динамических испытаний изделий | 1989 |
|
SU1716353A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| Стенд для динамических испытаний изделий | 1990 |
|
SU1791743A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| Способ вибрационных испытаний авиационных управляемых ракет в сборе на прочность при воздействии широкополосной случайной вибрации | 2019 |
|
RU2731019C1 |
| СПОСОБ ИЗМЕРЕНИЯ | 1995 |
|
RU2117250C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2021 |
|
RU2766833C1 |
Изобретение относится к динамическим испытательным стендам-тренажерам. Динамический испытательный стенд содержит центральный пульт управления, моделирующий программно-аппаратными средствами различные сценарии, виды нагрузок и задающий движение, а также раздельно управляемые консоль центрифуги, карданов подвес с кольцом и вилкой на конце консоли, кабину в кардановом подвесе и расположенные в кабине подвижную платформу с актуатором, генерирующим возвратно-поступательные движения вдоль вертикальной оси Z относительно основания кабины, и расположенным на ней штатным испытательным стендом с конструктивно-изменяемой конфигурацией, трансформируемым в виде штатной платформы или штатного кресла. Динамический испытательный стенд также содержит по меньшей мере два дополнительных актуатора, блок управления актуаторами, акселерометр и автоматический регулятор уровня, вход которого электрически связан с акселерометром, механически связанным с подвижной платформой, а выход - со вторым входом блока управления актуаторами, первый вход которого связан электрически с выходом центрального пульта управления, а выходы блока управления актуаторами - с соответствующими актуаторами, генерирующими возвратно-поступательные движения ортогонально друг другу в планарных X, Y осях и вертикальной оси Z. В результате расширяются функциональные возможности динамического испытательного стенда. 4 ил.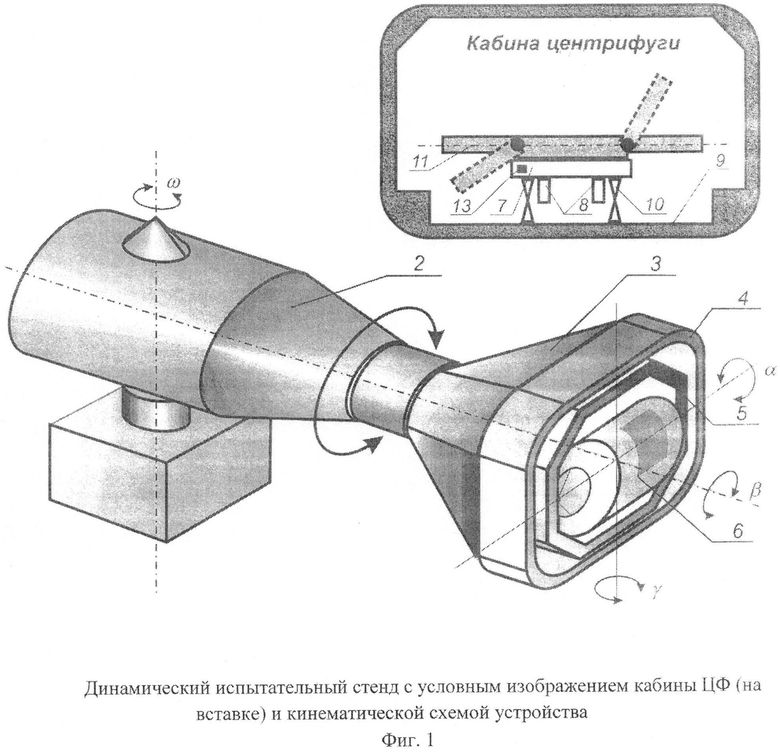
Динамический испытательный стенд, содержащий: центральный пульт управления, моделирующий программно-аппаратными средствами различные сценарии, виды нагрузок и задающий движение; и раздельно управляемые консоль центрифуги, карданов подвес с кольцом и вилкой на конце консоли, кабину в кардановом подвесе; и расположенные в кабине подвижную платформу с актуатором, генерирующим возвратно-поступательные движения вдоль вертикальной оси Z относительно основания кабины, и расположенным на ней штатным испытательным стендом с конструктивно-изменяемой конфигурацией, трансформируемым в виде штатной платформы или штатного кресла, отличающийся тем, что введены: по меньшей мере два актуатора, блок управления актуаторами, акселерометр и автоматический регулятор уровня, вход которого электрически связан с акселерометром, механически связанным с подвижной платформой, а выход - со вторым входом блока управления актуаторами, первый вход которого связан электрически с выходом центрального пульта управления, а выходы блока управления актуаторами - с соответствующими актуаторами, генерирующими возвратно-поступательные движения ортогонально друг другу в планарных X, Y осях и вертикальной оси Z.
| SU 1360443 A1, 20.01.1996 | |||
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2003 |
|
RU2254617C2 |
| Фазовый детектор для измерения сдвига фаз между напряжениями с кратными или дробнорациональными частотами | 1957 |
|
SU115538A2 |
| JP 07334072 A, 22.12.1995 | |||

