Область техники, к которой относится изобретение
Настоящее раскрытие в целом относится к регулированию управляющих параметров привода транспортного средства с целью улучшения показателей по выбросам в атмосферу, эффективности и эксплуатационным характеристикам.
Уровень техники/Раскрытие изобретения
Привод транспортного средства может включать в себя двигатель внутреннего сгорания, мотор и трансмиссию. Двигатель, мотор и трансмиссию можно эксплуатировать в соответствии с управляющими параметрами, хранящимися в таблицах и/или функциях в памяти. В таблицах и/или функциях могут находиться значения, которые разработчики транспортного средства определяют, эксплуатируя двигатель, мотор и трансмиссию в тщательно контролируемых условиях. В зависимости от сложности транспортного средства и эксплуатационных требований, определяемых параметров может быть до сотен или тысяч. Кроме того, оптимальные значения параметров могут немного изменяться от одного транспортного средства к другому из-за допусков при изготовлении. Следовательно, могут понадобиться многие часы работы для полного картирования управляющих параметров двигателя, мотора и трансмиссии. Из этого следует, что имеется потребность обеспечения способа определения управляющих параметров двигателя, мотора и трансмиссии с меньшими временными затратами.
Авторы настоящего изобретения выявили вышеуказанные проблемы и разработали способ эксплуатации привода, содержащий: получение условий картирования параметров привода от сети, дистанционной относительно транспортного средства, в контроллер транспортного средства; и регулирование посредством контроллера рабочих условий привода до условий картирования параметров привода.
Транслируя на контроллер транспортного средства запрос на картирование параметров привода, можно достичь технического результата снижения временных затрат на заполнение значениями управляющих параметров привода в контроллере транспортного средства. В одном примере, сетевой контроллер сохраняет управляющие параметры транспортного средства в памяти и активно посылает запрос на одно или несколько транспортных средств, чтобы они работали в выборочных условиях для обеспечения данных и/или управляющих параметров для корректировки или обновления подразумеваемых (по умолчанию) управляющих параметров транспортного средства. Данные и/или управляющие параметры могут составить основу для регулирования управляющих параметров некоторого количества других транспортных средств после того, как данные и/или управляющие параметры будут подгружены в дистанционную относительно транспортного средства облачную сеть. Тем самым создается возможность уменьшения временных затрат на заполнение управляющих параметров.
Настоящее раскрытие может обеспечить несколько полезных результатов. В частности, таковой подход может снизить временные затраты на определение управляющих параметров привода. Дополнительно, подход позволяет эксплуатировать транспортное средство автономно, без водителя, для определения управляющих параметров привода. Кроме того, подход может запросить только выборочные условия картирования параметров привода, так что картирование параметров привода может быть выполнено более эффективно.
Вышеприведенные и другие преимущества, а также отличительные признаки настоящего раскрытия станут очевидными из нижеследующего раздела «Осуществление изобретения», будучи рассмотренного отдельно или в связи с сопроводительными чертежами.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На фиг. 1 изображена блок-схема транспортного средства.
На фиг. 2 схематически показан двигатель транспортного средства.
На фиг. 3-6 показаны примеры способа эксплуатации привода транспортного средства.
На фиг. 7 показан пример способа картирования управляющих параметров привода.
Осуществление изобретения
Раскрываются способы эксплуатации транспортного средства, улучшающие картирование параметров системы управления. В одном примере, обеспечивается способ подачи привода транспортного средства команды на работу в условиях, требуемых для определения управляющих параметров привода транспортного средства. Транспортное средство может иметь конфигурацию, показанную на фиг. 1. Транспортное средство может включать в себя двигатель, как показано на фиг. 2. Двигатель и привод могут эксплуатироваться в соответствии с показанным на фиг. 3 - фиг. 6 способом для определения установившихся управляющих параметров. На показанное на фиг. 1 транспортное средство дистанционно может подаваться команда на работу в выборочных условиях для определения управляющих параметров привода в соответствии с показанным на фиг. 7 способом.
На фиг. 1 схематически показано транспортное средство 100, включающее в себя привод 105. Привод 105 включает в себя двигатель 10 внутреннего сгорания, электромотор 50, инвертор 48 и трансмиссию 44. Тем не менее, в других примерах привод 105 может включать в себя только двигатель и трансмиссию, только электромотор, или только электромотор и трансмиссию. Двигатель 10 внутреннего сгорания может иметь некоторое количество цилиндров, и выходной крутящий момент двигателя может передаваться на трансмиссию 44. Двигатель 10 также содержит пусковую систему 54, включающую в себя электрический стартер. Топливом двигатель снабжается посредством топливной системы 20. Подаваемое двигателю 10 топливо может быть бензином, смесью бензина со спиртом, или может быть дизельным топливом. Электромотор 50 может также сообщать крутящий момент или поглощать крутящий момент от трансмиссии 44. Электромотор 50 может снабжаться энергией аккумуляторной батареей 46 посредством инвертора 48. Электромотор 50 может также заряжать аккумуляторную батарею 46 посредством инвертора 48 в процессе рекуперативного торможения. Трансмиссия 44 механически связана с колесами 52 транспортного средства для передачи мощности поверхности дороги.
Транспортное средство может также содержать человеко-машинный интерфейс или дисплей 19. Водителю могут выдаваться подсказки для подачи входных данных в транспортное средство через дисплейную панель 17. Водитель может вводить ответные воздействия в контроллер 12 привода средствами 15 ввода данных. С помощью средств 15 ввода данных водитель может вводить подтверждения, командные значения и подавать запросы. Средства 15 ввода данных среди прочего могут включать в себя нажимные кнопки, переключатели, клавиатуру и сенсорную панель.
Система 14 управления приводом включает в себя контроллер 12, датчики 16 и исполнительные устройства 81 управления приводом 105. Датчики 16 могут быть связаны с двигателем и/или мотором 50, и/или с инвертером 48, и/или с аккумуляторной батареей 46. К датчикам 16, среди прочего, могут относиться датчики, показанные на фиг. 2, а также датчики тока, определяющие протекание электрического тока между аккумуляторной батареей 46 и мотором 50, датчики положения мотора, датчики выходного и входного положений трансмиссии, датчики скорости транспортного средства, датчики глобальной системы позиционирования, датчики влажности окружающего воздуха, радарные и/или акустические датчики положения транспортного средства для определения окружающего дорожного движения, радиочастотные датчики для получения данных по состоянию дорожной обстановки, датчики частоты вращения колес, датчики температуры окружающего воздуха, датчики атмосферного давления, приемники и антенны для связи с радиочастотной коммуникационной системой 101, и датчики влажности окружающего воздуха. Исполнительные устройства 81 могут быть связаны с инвертором 48, мотором 50, трансмиссией 44 и двигателем 10. Среди прочего, исполнительными устройствами могут быть исполнительные устройства, показанные на фиг.2, переключатели или транзисторы в инверторе 48 для управления протеканием электрического тока между мотором 50 и аккумуляторной батареей 46, передатчики и антенна для связи с радиочастотной коммуникационной системой 101, а также зубчатые муфты трансмиссии.
Радиочастотная коммуникационная система 101 включает в себя антенны 103 для передачи и приема управляющих параметров привода транспортного средства и данных о транспортном средстве между облаком 13, другими транспортными средствами 119 и транспортным средством 100. Облако 13 является дистанционной сетевой системой, не находящейся в транспортном средстве 100 или в транспортных средствах 119. Облако включает в себя процессорное устройство 160, запоминающее устройство 161 и входы/выходы 162 для приема и передачи данных и управляющих параметров на транспортное средство 100 и на другие транспортные средства 119. Процессорное устройство 160 может содержать оптимизационные алгоритмы, работающие на данных и/или управляющих параметрах привода, получаемых от транспортного средства 100 и других транспортных средств 119. Процессорное устройство 160 может транслировать управляющие параметры привода на транспортное средство 100 и другие транспортные средства 119 через радиочастотную коммуникационную систему 101. Радиочастотная коммуникационная система 101 может включать в себя стационарные антенные вышки и/или спутники для приема и трансляции управляющих параметров привода и данных.
На фиг. 2 схематично показан один цилиндр многоцилиндрового двигателя 10, который может включать в себя движительная система транспортного средства 100, показанного на фиг. 1. Двигатель 10 может по меньшей мере частично управляться системой управления, включающей в себя контроллер 12, а также по воздействиям, поступающим от оператора 230 транспортного средства через устройство 232 ввода. В настоящем примере, устройство 232 ввода включает в себя педаль акселератора и датчик 234 положения педали, предназначенный для выработки пропорционального сигнала положения педали. Камера 230 (то есть, цилиндр) сгорания двигателя 10 может включать в себя стенки 236 камеры сгорания с размещенным между ними поршнем 238. В некоторых примерах, зеркало поршня 238 внутри цилиндра 230 может иметь выемку. Поршень 238 может быть связан с коленчатым валом 240 так, чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленвал 240 может быть связан по меньшей мере с одним ведущим колесом транспортного средства через промежуточную систему трансмиссии, как показано на фиг. 1. Кроме того, для обеспечения запуска двигателя 10, с коленчатым валом 240 через маховик может быть связан стартер.
Камера 230 сгорания может принимать впускной воздух из впускного коллектора 247 через впускную нагнетательную камеру 244 и может выпускать отработавшие газы через выпускной канал 248. Впускной коллектор 247 и выпускной канал 248 могут избирательно сообщаться с камерой 230 сгорания посредством соответствующих впускного клапана 250 и выпускного клапана 256. В некоторых примерах камера 230 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Впускной клапан 250 может управляться контроллером 12 посредством исполнительного устройства 245 клапана и кулачка 251. Аналогичным образом, выпускной клапан 256 может управляться контроллером 12 посредством исполнительного устройства 246 клапана и кулачка 253. Альтернативно, исполнительное устройство может быть электрогидравлическим или другим механизмом, подходящим для осуществления приведения клапанов в движение. В некоторых условиях, контроллер может варьировать подаваемые на исполнительные устройства 245 и 246 сигналы для управления временами открытия и закрытия соответствующих впускных и выпускных клапанов. Положение впускного клапана 250 и выпускного клапана 256 может находиться датчиками 255 и 277 положения соответствующего клапана. Для варьирования работы клапанов, исполнительные устройства 245 и 246 могут использовать одну или несколько из следующих систем: переключения профиля кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ИВПК).
Топливная форсунка 266 показана связанной непосредственно с камерой 230 сгорания для впрыска топлива непосредственно в нее пропорционально ширине импульса сигнала, принимаемого от контроллера 12. Таким образом, топливная форсунка 266 обеспечивает то, что называется прямым впрыском топлива в камеру 230 сгорания. Топливная форсунка может быть смонтирована в боковине камеры сгорания или в верхней части камеры сгорания, например. Топливо может доставляться к топливной форсунке 266 от топливной системы, включающей в себя топливный бак, топливный насос и топливную рампу.
Система 290 зажигания может подавать искру зажигания в камеру 230 сгорания посредством свечи 292 зажигания в ответ на получение от контролера 12 сигнала угла опережения зажигания. Хотя показаны компоненты искрового зажигания, в некоторых осуществлениях, камера 230 сгорания или одна или несколько других камер сгорания двигателя 10 могут работать в режиме компрессионного зажигания, с искрой зажигания или без искры зажигания.
Впускной канал 242 или впускной коллектор 247 может содержать дроссельную заслонку 220, имеющую дроссельную шайбу 264. В данном частном примере, положение дроссельной шайбы 264 может варьироваться контроллером 12 для открытия и закрытия дроссельной заслонки 220 посредством электромотора или исполнительного устройства в конфигурации, которая общепринято называется электронным управлением дроссельной заслонкой (ЭУДЗ). Таким образом, дроссельную заслонку 220 можно приводить в действие для варьирования потока впускного воздуха, подаваемого в камеру 230 сгорания и в другие цилиндры двигателя. Информация о положении дроссельной шайбы 264 может обеспечиваться контроллеру 12 датчиком (не показан) положения дроссельной заслонки. Во впускном канале 264 может также содержаться датчик 222 массового расхода воздух и датчик 224 давления воздуха в коллекторе, причем указанные датчики предназначены для подачи в контроллер 12 соответствующих сигналов (МРВ) массового расхода воздуха и (ДВК) давления воздуха в коллекторе.
Двигатель 10 также может содержать устройство сжатия, такое как турбонагнетатель или механический нагнетатель, имеющие по меньшей мере компрессор 274, расположенный вдоль впуска 242. В случае турбонагнетателя, компрессор 274 может приводиться в действие по меньшей мере турбиной 276 (например, через вал 248), расположенной вдоль выпускного канала 248. В случае механического нагнетателя, компрессор 274 может приводиться в действие по меньшей мере двигателем 10 и/или электрической машиной, и может не включать в себя турбины. При этом, степень сжатия, обеспечиваемая для одного или нескольких цилиндров двигателя турбонагнетателем или механическим нагнетателем, может варьироваться контроллером 12.
Датчик 228 отработавших газов показан связанным с выпускным каналом 248 выше по потоку от устройства 278 (УСТВ) снижения токсичности выбросов. Датчиком 228 отработавших газов может быть любой датчик, подходящий для обеспечения информации о воздушно-топливном отношении в отработавших газах, например, универсальный или широкодиапазонный датчик УДКОГ содержания кислорода в отработавших, кислородный датчик ДКОГ с двумя состояниями, нагреваемый датчик НДКОГ содержания кислорода в отработавших газах, датчик NOx, НС или СО.
УСТВ 278 показано размещенным вдоль по выпускному каналу 248 ниже по потоку от датчика 228 отработавших газов. В некоторых примерах, УСТВ 278 может представлять собой трехкомпонентный каталитический нейтрализатор (ТКН) и/или сажевый фильтр.
Контроллер 12 на фиг. 2 показан в виде микрокомпьютера, содержащего: микропроцессорное устройство 206 (МПУ), порты 208 ввода/вывода, электронную среду хранения выполняемых программ и значений управляющих параметров, в данном конкретном примере показанную в виде постоянного запоминающего устройства 210 (ПЗУ) или долговременной памяти, оперативное запоминающее устройство 212 (ОЗУ), энергонезависимое запоминающее устройство 214 (ЭЗУ) и шину данных. Контроллер 12, в дополнение к рассмотренным выше сигналам, может принимать разнообразные сигналы от связанных с двигателем 10 датчиков, среди которых можно назвать: показание массового расхода воздуха (МРВ) от датчика 222 массового расхода воздуха; показание температуры хладагента двигателя (ТХД) от датчика 216 температуры, связанного с рубашкой 218 охлаждения; сигнал датчика 225 положения коленчатого вала, измеряющего положение коленчатого вала; сигнал положения дросселя (ПД) или степени открытия дросселя от датчика положения дросселя; сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 224. Сигнал частоты вращения двигателя (ЧВД) может быть сгенерирован контроллером 12 из сигнала отдатчика 225. Сигнал ДВК от датчика ДВК можно использовать для индикации разряжения или давления во впускном коллекторе. Следует отметить, что могут быть использованы разнообразные комбинации вышеперечисленных датчиков, например датчик МРВ без датчика ДВК, или наоборот. При работе в стехиометрическом режиме, сигнал датчика ДВК может нести в себе информацию о крутящем моменте двигателя. Кроме того, сигнал данного датчика вместе с зарегистрированной частотой вращения двигателя может дать оценку заряда (включающего в себя воздух), засасываемого в цилиндр. В одном примере, датчик 225, который также используют в качестве датчика частоты вращения двигателя, может выдавать заданное количество импульсов на каждый оборот коленчатого вала.
Контроллер 12 может принимать команды от водителя или оператора 231 через средства 15 ввода. Контроллер 12 может также получать и/или посылать или транслировать данные о приводе, включающие управляющие параметры, на облако 13 по радиочастотной коммуникационной системе 101.
Постоянное запоминающее устройство 210 может быть запрограммировано машиночитаемыми данными, представляющими инструкции, исполняемые микропроцессорным устройством 206 для реализации способов, описанных ниже, а также других вариантов, которые предполагаются, но конкретно не перечисляются.
Согласно вышеприведенному описанию, на фиг. 2 показан только один цилиндр многоцилиндрового двигателя, и каждый цилиндр одинаково с другими может включать в себя собственный комплект впускных/выпускных клапанов, топливную форсунку, свечу зажигания и т.д.
В процессе работы каждый цилиндр двигателя 10 типично проходит четырехтактный цикл, содержащий: такт впуска, так сжатия, такт расширения и такт выпуска. На такте впуска обычно выпускной клапан 256 закрывается, а впускной клапан 250 открывается. По впускному коллектору 247 в камеру 30 сгорания поступает воздух, и поршень 238 перемещается в нижнюю часть цилиндра для увеличения внутреннего объема камеры 30 сгорания. Положение, в котором поршень 238 находится вблизи низа цилиндра в конце своего хода (то есть когда объем камеры 30 сгорания максимален), специалистами в данной области техники характерно называется нижней мертвой точкой (НМТ).
На такте сжатия впускной клапан 250 и выпускной клапан 256 закрыты. Поршень 238 перемещается к головке цилиндра, сжимая при этом воздух внутри камеры 230 сгорания. Положение, в котором поршень 238 находится в конце своего хода вверху ближе всего к головке цилиндра (то есть когда объем камеры 230 минимален), специалистами в данной области техники характерно называется верхней мертвой точкой (ВМТ). В процессе, который здесь и далее называется впрыском, в камеру сгорания вводится топливо. В процессе, который здесь и далее называется зажиганием, впрыснутое топливо воспламеняется известными способами и средствами, такими как свеча 292 зажигания, в результате чего происходит сжигание топливовоздушной смеси.
На такте расширения расширяющиеся газы толкают поршень 238 обратно в НМТ. Коленчатый вал 240 преобразует перемещение поршня в момент вращения вала. Наконец, на такте выпуска открывается выпускной клапан 256, открывая сожженной топливовоздушной смеси путь в выпускной коллектор 248, а поршень возвращается в ВМТ. Следует отметить, что описание выше по тексту приведено только в качестве примера, и что моменты открытия или закрытия клапанов могут изменяться, например, для положительного или отрицательного перекрытия клапанов, позднего закрытия впускного клапана или по-другому.
На фиг. 3 - фиг. 6 в качестве примера показан способ эксплуатации привода. Способ в соответствии с фиг. 3 - фиг. 6 может быть включен в показанную на фиг. 1 и фиг. 2 систему в виде хранящихся в долговременной памяти исполняемых инструкций. Кроме того, показанный на фиг. 3 - фиг. 6 способ может работать совместно со способом, показанным на фиг. 7.
На этапе 301 способ 300 определяет хранящиеся в памяти рабочие области привода, включающие в себя неустановившиеся значения управляющих параметров привода. Среди прочего, к рабочим областям привода могут быть отнесены диапазоны частоты вращения двигателя (например, 1000 об/мин - 2000 об/мин), диапазоны крутящего момента двигателя (например, 5 Нм - 500 Н-м), диапазоны крутящего момента мотора (например, 0 Нм - 200 Нм), диапазон частоты вращения мотора (например, 0 об/мин - 1000 об/мин), диапазоны входной частоты вращения трансмиссии (например, 0 об/мин - 6000 об/мин), диапазоны входного крутящего момента трансмиссии (например, 0 Н-м - 500 Н-м), входной ток мотора (например, 1 - 200 Ампер), выходной ток мотора (например, 1-100 Ампер), входной ток инвертора (например, 1 - 200 Ампер), выходной ток инвертора (например, 1 - 300 Ампер).
Неустановившимися значениями управляющего параметра привода являются хранящиеся в памяти значения переменных, используемые в качестве основы для управляющих команд, рабочих состояний контроллера и управляющих переменных, но которые не были отрегулированы по рабочим условиям транспортного средства.
Неустановившиеся управляющие параметры привода могут считаться подразумеваемыми управляющими параметрами привода, так как они не были отрегулированы по работе транспортного средства. Управляющие параметры привода, являющиеся подразумеваемыми, могут сохраняться в индивидуальных переменных, в таблицах и/или функциях.
В одном примере, подразумеваемые управляющие параметры привода могут содержать предустановленные значения, которые не были оптимизированы или отрегулированы по фактическим рабочим условиям привода. Если предустановленные значения изменились, то можно определить, что конкретные управляющие параметры привода не являются подразумеваемыми или неустановившимися управляющими параметрами привода. В других примерах может быть выделена область памяти, включающая в себя биты памяти, указывающие на то, был или не был адаптирован или отрегулирован конкретный отдельный управляющий параметр привода по рабочим условиям транспортного средства, несущего управляющие параметры привода. Если конкретный управляющий параметр привода был отрегулирован, то значение бита можно поменять с нуля на единицу. По хранящимся в памяти значениям переменных способ 300 выясняет, являются ли конкретные управляющие параметры неустановившимися или установившимися (например, отрегулированными по рабочим условиям транспортного средства, несущего управляющие параметры привода). Идентифицируются подразумеваемые или неустановившиеся управляющие параметры привода, и идентифицируется их положение в таблицах и/или функции. Например, неустановившимися могут быть указаны данные, располагающиеся в ячейках данных, начиная со столбца 2, строки 2 до столбца 5, строки 2 таблицы, описывающие минимальный момент зажигания для оптимального крутящего момента. Строка 2 таблицы может соответствовать 700 об/мин, а столбцы 3-5 могут соответствовать крутящему моменту двигателя в 40-60 Н-м. В данном примере, 700 об/мин и 40-60 Н-м являются рабочими областями привода, имеющими неустановившиеся управляющие параметры привода. Способ 300 переходит на этап 302 после определения того, какие из управляющих переменных привода являются неустановившимися, если таковые найдутся.
На этапе 302 способ 300 указывает рабочие области привода, в которых рабочие или управляющие параметры являются неустановившимися, облачной сети, находящейся дистанционно от транспортного средства, несущего рабочие или управляющие параметры привода. Способ 300 может подгружать в облачную сеть рабочие области привода, в которых рабочие или управляющие параметры привода являются неустановившимися, в предустановленные моменты времени, например в момент запуска или остановки транспортного средства. В одном примере, способ 300 запрашивает облачную сеть и подгружает рабочие параметры привода в рабочие области привода, в которых рабочие параметры привода являются неустановившимися. После определения того, надо или не надо подгружать рабочие области управляющих параметров в облачную сеть, способ 300 переходит на этап 303.
На этапе 303 способ 300 выясняет, запрашивает ли облачная сеть обновления управляющих параметров привода. Облачная сеть может транслировать запрос на обновление управляющих параметров привода в предустановленные моменты времени, например в момент запуска или остановки транспортного средства. Если способ 300 выяснит, что облачная сеть запрашивает обновление управляющих параметров привода на основе идентификации, выполненной на этапе 302, ответ будет положительным, и способ 300 перейдет на этап 304. В противном случае, ответ будет отрицательным, и способ перейдет на этап 305.
На этапе 304 способ 300 получает управляющие параметры привода из облачной сети. Облачная сеть доставляет управляющие параметры привода для замены неустановившихся или подразумеваемых управляющих параметров по беспроводной радиочастотной коммуникационной системе. Способ 300 заменяет находящиеся в памяти неустановившиеся или подразумеваемые управляющие параметры привода значениями, полученными посредством облачной сети. После корректировки управляющих параметров привода способ 300 прекращает свое выполнение.
На этапе 305 способ 300 выясняет, имеется ли запрос от облачной сети на управляющие параметры или данные. Облачная сеть может запросить установившиеся (например, управляющие параметры привода, скорректированные по рабочим условиям транспортного средства, в котором параметры определяют) управляющие параметры привода или данные от контроллера привода транспортного средства через радиочастотную коммуникационную систему. Если способ 300 выяснит, что имеется запрос управляющих параметров или данных, ответ будет положительным, и способ 300 перейдет на этап 307. В противном случае, ответ будет отрицательным, и способ 300 перейдет на этап 313, показанный на фиг. 4.
На этапе 307 способ 300 выясняет, должен ли быть сбор управляющих параметров привода или данных пассивным. Способ 300 может выяснить, что сбор управляющих параметров привода или данных желательно выполнять пассивно в выборочных условиях. Например, способ 300 может постановить, что пассивный сбор управляющих параметров привода желателен, когда в транспортном средстве находится человек, что обнаруживается по брелоку с ключами, по находящемуся поблизости сотового телефона или как-либо иначе. Способ 300 может постановить, что пассивный сбор управляющих параметров привода желателен по дорожной обстановке, например, при транспортном заторе или тогда, когда транспортное средство движется по дороге с ограничением скорости, меньшим пороговой скорости. Пассивный сбор может быть начат тогда, когда изменение рабочей области привода для пассивного сбора параметров привода меньше первого порогового изменения относительно актуальной рабочей области привода. Кроме того, пассивный сбор может требовать того, чтобы рабочие параметры привода находились в пределах первого диапазона (например, частота вращения входного вала трансмиссии была меньше 2500 об/мин, а входной крутящий момент трансмиссии был меньше 75 Н-м), или того, чтобы изменения в рабочих параметрах привода были меньше порогового значения (например, меньше 5% изменения положения дроссельной заслонки, меньше 4% изменения крутящего момента или частоты вращения двигателя и т.п.). Пассивный сбор управляющих параметров или данных также может требовать существования и других условий привода, среди которых можно назвать следующие: чтобы транспортное средство не двигалось в школьной зоне, чтобы транспортное средство двигалось по дорогам, имеющим коэффициент сцепления не менее порогового, чтобы плотность населения была не больше своего порогового значения, и чтобы транспортное средство не двигалось в темное время суток. Условия транспортного средства могут быть определены посредством датчиков транспортного средства, глобальной системы позиционирования или по транслируемой информации. Если не выбраны умеренный и агрессивный режимы, то пассивный режим сбора может быть режимом по умолчанию. Если способ 300 постановит, что желателен пассивный сбор управляющих параметров привода или данных, то ответ будет положительным и способ 300 перейдет на этап 310, показанный на фиг. 4. В противном случае, ответ будет отрицательным, и способ 300 перейдет на этап 308.
На этапе 308 способ 300 выясняет, должен ли быть умеренным сбор управляющих параметров и данных привода. Способ 300 может постановить, что сбор управляющих параметров или данных привода желательно выполнять умеренно в выборочных условиях. Например, способ 300 может постановить, что умеренный сбор управляющих параметров привода желателен, когда в транспортном средстве находится человек, что обнаруживается по брелоку с ключами, по находящемуся поблизости сотовому телефону или как-либо иначе. Способ 300 может постановить, что сбор управляющих параметров или данных привода желательно выполнять умеренно, исходя из дорожной обстановки, например, при отсутствии транспортных заторов, или когда транспортное средство движется по дорогам, имеющим ограничение скорости выше порогового значения. Среди дополнительных дорожных ситуаций, которые могут инициировать сбор управляющих параметров или данных, можно назвать следующие: движение транспортного средства по автостраде, по дорогам с коэффициентом сцепления выше порового, плотность населения ниже порогового значения и движение транспортного средства в светлое время суток. Умеренный сбор может быть инициирован тогда, когда изменение рабочей области привода для умеренного сбора параметров привода меньше второго порогового изменения относительно актуальной рабочей области привода. Кроме того, умеренный сбор может требовать того, чтобы рабочие параметры привода находились в пределах второго, большего чем первый, диапазона (например, частота вращения входного вала трансмиссии была меньше 4500 об/мин, а входной крутящий момент трансмиссии был меньше 125 Н-м), или того, чтобы изменения в рабочих параметрах привода были меньше порогового значения (например, меньше 10% изменения положения дроссельной заслонки, меньше 10% изменения крутящего момента или частоты вращения двигателя и т.п.). Условия транспортного средства могут быть определены посредством датчиков транспортного средства, глобальной системы позиционирования или по транслируемой информации. Если способ 300 постановит, что желателен умеренный сбор управляющих параметров привода и данных, то ответ будет положительным, и способ 300 перейдет на этап 320, показанный на фиг. 5. В противном случае, ответ будет отрицательным и способ 300 перейдет на этап 350, показанный на фиг. 6.
На этапе 398 способ 300 отсылает на облачную сеть управляющие параметры привода, обладающие требуемой достоверностью. Управляющие параметры привода могут считаться достоверными, после того, как их отрегулировали пороговое количество раз (например, два раза). Способ отсылает управляющие параметры привода и/или данные через радиочастотную коммуникационную систему. После того, как управляющие параметры привода и/или данные были отосланы на облачную сеть, выполнение способа 300 завершается.
На этапе 399 способ 300 предлагает облачной сети управляющие параметры привода и/или данные. Способ 300 может предлагать облачной сети управляющие параметры привода и/или данные в предустановленные моменты времени, например, через предустановленное количество миль, пройденных транспортным средством, или когда транспортное средство останавливается и покидается человеком. Облачная сеть может принять или отклонить предложение. После того, как управляющие параметры привода и/или данные были предложены облачной сети, выполнение способа 300 прекращается.
На этапе 310, показанном на фиг. 4, способ 300 выясняет будут ли ощутимыми изменения рабочих условий привода транспортного средства относительно существующих условий. В одном примере, способ 300 устанавливает, что изменения работы привода транспортного средства будут ощутимыми, если частота вращения двигателя изменится более, чем на пороговую частоту вращения (например, 500 об/мин). В другом примере, способ 300 устанавливает, что изменения будут ощутимы, если частота вращения мотора изменится более, чем на пороговую частоту вращения (например, на 300 об/мин). Еще в одном возможном примере, способ 300 устанавливает, что изменения рабочих условий привода будут ощутимыми, если крутящий момент двигателя изменится на предустановленную величину относительно существующего выходного крутящего момента двигателя (например, на 15%). Еще в одном примере, способ 300 устанавливает, что изменения рабочих условий привода будут ощутимыми, если крутящий момент мотора изменится более, чем на предустановленную величину относительно существующего выходного крутящего момента мотора (например, на 15%). Еще в одном возможном примере, способ 300 устанавливает, что изменения рабочих условий привода будут ощутимыми, если для того, чтобы эксплуатировать двигатель и/или мотор при требуемой частоте вращения и/или крутящем моменте для получения данных или для адаптации управляющих параметров привода требуется переключение передач трансмиссии. Если способ 300 устанавливает, что рабочие условия привода будут ощутимо отличаться от существующих рабочих условий привода, то ответ будет положительным, и способ 300 перейдет на этап 311. В противном случае, ответ будет отрицательным, и способ 300 перейдет на этап 315.
На этапе 311 способ 300 запрашивает разрешения от водителя или оператора на избирательную модификацию рабочих условий привода. Рабочие условия привода среди прочего могут включать в себя указания на детонацию двигателя, количество воздуха в двигателе, давление масла в двигателе, воздушно-топливное отношение в двигателе, концентрации компонентов выбросов двигателя (например, НС, NOx, СО, сажи), температуру двигателя, температуру окружающего воздуха, атмосферное давление, частоту вращения двигателя, крутящий момент двигателя, частоту вращения мотора, крутящий момент мотора, передачу трансмиссии, состояние муфты преобразования крутящего момента (например, открытая, закрытая, или некоторая степень пробуксовки), степень открытия дроссельной заслонки двигателя, положение распределительных валов двигателя, момент зажигания двигателя, потребления тока мотором, ток мотора при эксплуатации мотора в качестве генератора, эффективность инвертора, температуру инвертора, температуру аккумуляторной батареи, степень заряженности аккумуляторной батареи (СЗАКБ), передачу трансмиссии, давление трансмиссионного масла и степень наддува от турбонагнетателя. Способ 300 может запросить разрешение через дисплей или панель водительского интерфейса. После запрашивания у водителя разрешения на регулирование или модификацию рабочих условий привода способ 300 переходит на этап 312.
На этапе 312 способ 300 выясняет, дал ли водитель или оператор разрешение на регулирование рабочих условий привода. Водитель может дать разрешение через водительский интерфейс или через дисплейную панель. Если водитель даст разрешение, то ответ будет положительным, и способ 300 перейдет на этап 315. В противном случае, ответ будет отрицательным, и способ перейдет на этап 313.
На этапе 313 способ 300 не выполняет интрузивного сбора данных или выполнения регулировок рабочих условий привода для регулирования или адаптации управляющих параметров работы привода. Например, если облачная сеть запросила определения минимального момента зажигания для оптимального крутящего момента при частоте вращения двигателя в 1200 об/мин и крутящем моменте 125 Н-м при работе двигателя при 1150 об/мин и 100 Н-м, то регулирование частоты вращения двигателя и крутящего момента двигателя не выполняются контроллером привода двигателя по запросу облачной сети. Вместо этого, привод работает по запрошенному водителем крутящему моменту (например, определяемому положением педали акселератора и скоростью движения транспортного средства) и по управляющим параметрам привода, существующим в контроллере привода. После того, как не было выполнено регулирования рабочих условий привода по запросу облачной сети, способ 300 переходит на этап 314.
На этапе 314 способ 300 может собрать данные привода и отрегулировать управляющие параметры привода по рабочим условиям привода согласно запросу водителя. Собранные данные привода среди прочего могут включать в себя указания на детонацию двигателя, частоту вращения двигателя, крутящий момент двигателя или нагрузку двигателя, количество воздуха в двигателе, установку момента зажигания двигателя, давление масла в двигателе, воздушно-топливное отношение в двигателе, концентрации компонентов выбросов двигателя (например, НС, NOx, СО, сажи), температуру двигателя, температуру и давление окружающего воздуха, потребление топлива двигателем, крутящий момент мотора, ток мотора, температуру мотора, частоту вращения мотора, эффективность инвертора, ток инвертора, температуру инвертора, температуру аккумуляторной батареи, степень заряженности аккумуляторной батареи (СЗАКБ), скорость движения транспортного средства, передачу трансмиссии и давление масла в трансмиссии. Кроме того, адаптированные или отрегулированные управляющие параметры привода, среди прочего включают в себя: коэффициенты усиления контроллера, переменные передаточной функции (например, перевод напряжения выходного сигнала датчика содержания кислорода в воздушно-топливное отношение, кривые крутящего момента мотора), момент зажигания для оптимального крутящего момента (ОКМ), пограничный момент зажигания и т.п. Способ 300 может получить данные, отрегулировать управляющие параметры привода и собрать управляющие параметры привода при рабочих условиях, запрошенных водителем без рабочих условий облачной сети, обеспеченных приводом. После сбора данных и/или управляющего параметра привода, базирующихся на рабочих условиях привода, запрошенных водителем, способ 300 переходит на этап 399, изображенный на фиг. 3.
На этапе 315 способ 300 регулирует рабочие условия привода для эксплуатации привода в областях, запрошенных облачной сетью. Например, способ 300 может выдерживать скорость движения транспортного средства на определенном значении, регулируя крутящий момент двигателя и переключаясь на пониженную передачу для увеличения частоты вращения двигателя. Тем самым, привод можно эксплуатировать при различной частоте вращения двигателя для сбора данных привода и для того, чтобы можно было адаптировать/отрегулировать управляющие параметры привода при различных частотах вращения двигателя.
В другом примере, способ 300 может эксплуатировать двигатель при постоянной частоте вращения, но изменять при этом момент зажигания (то есть, регулируя момент зажигания в сторону опережения или запаздывания относительного базового значения момента зажигания) и открывать дроссельную заслонку двигателя. При этом можно определить момент зажигания ОКМ и пограничный момент зажигания по крутящему моменту двигателя и признакам детонации двигателя. Кроме того, по различным моментам зажигания можно определить температуры отработавших газов.
Еще в одном примере, могут изменять фазы кулачкового распределения (то есть, сдвигать фазы кулачкового распределения в сторону опережения или запаздывания относительно базовой установки фаз кулачкового распределения), при одновременном регулировании положения дроссельной заслонки для сохранения постоянным крутящего момента двигателя или для обеспечения требуемого крутящего момента двигателя. Датчики давления в цилиндрах могут выдавать данные для нахождения индикаторного среднего эффективного давления (ИСЭД) с тем, чтобы определить устойчивость горения и требуемые установки фаз кулачкового распределения. Информация о давление во впускном коллекторе также может быть получена для того, чтобы найти значения фаз кулачкового распределения для снижения потерь на прокачивание в двигателе.
Способ 300 также регулирует или адаптирует управляющие параметры в рабочих условиях, запрошенных облачной сетью. Например, способ 300 может адаптировать коэффициенты усиления контроллера, передаточные функции и значения в таблицах и/или функциях, описывающих работу двигателя, мотора, трансмиссии и инвертора посредством регулирования двигателя, мотора и трансмиссии до условий, предписанных облачной сетью. В одном примере, способ 300 регулирует передаточную функцию топливной форсунки по выходному сигналу датчика содержания кислорода в отработавших газах (например, регулированием уменьшая подачу топливной форсунки, если датчик содержания кислорода указывает на то, что воздушно-топливная смесь обогащена). Тем самым, привод можно эксплуатировать в условиях, запрошенных облачной сетью для получения данных привода и адаптации управляющих параметров привода. После начала эксплуатации привода в условиях, запрошенных облачной сетью, способ 300 переходит на этап 316.
На этапе 316 способ 300 обновляет и/или регулирует хранящиеся в памяти управляющие параметры привода по эксплуатации привода в условиях, запрошенных облачной сетью. Кроме того, способ 300 может сохранить в памяти полученные данные, собранные в процессе эксплуатации привода в условиях, запрошенных облачной сетью. После сохранения данных и управляющих параметров в памяти способ 300 переходит на этап 398.
На этапе 320, показанном на фиг. 5, способ 300 оценивает условия движения. Среди прочего, дорожные условия могут включать в себя скоростные ограничения, фактическую скорость движения транспортного средства, близость к другому транспортному средству (определяемую, например, акустическим или радарным способом), населенность области, в которой движется транспортное средство, частоту вращения двигателя, крутящий момент двигателя, частоту вращения мотора, крутящий момент мотора, выбранную передачу трансмиссии, температуру двигателя, температуру и давление окружающего воздуха, подачу топлива в двигатель, подачу воздуха в двигатель, воздушно-топливное отношение двигателя, светлое или темное время суток, коэффициент сцепления дороги и идентификационные данные присутствующего водителя. После оценивания условий движения способ 300 переходит на этап 321.
На этапе 321 способ 300 выясняет, эксплуатируется ли транспортное средство с водителем, или без него (например, автономно). В одном примере, способ выясняет, ведет ли транспортное средство водитель, по хранящемуся в памяти значению переменной, которая указывает на то, управляется ли транспортное средство водителем или контроллером. Если способ 300 выяснит, что транспортным средством управляет человек, то ответ будет положительным и способ 300 перейдет на этап 331. В противном случае, ответ будет отрицательным, и способ 300 перейдет на этап 322.
На этапе 322 способ 300 выясняет, находится ли в транспортном средстве пассажир, если транспортное средство находится в умеренном режиме сбора. В одном примере, способ 300 выясняет присутствие пассажира по данным датчиков сидений. Альтернативно, способ 300 может регистрировать сердцебиение пассажира или присутствие пассажира акустическими датчиками. Если способ 300 выяснит, что в транспортном средстве находятся люди, то ответ будет положительным, и способ 300 перейдет на этап 325. В противном случае, ответ будет отрицательным, и способ 300 перейдет на этап 323.
На этапе 323 способ 300 переходит к направлению транспортного средства следовать по маршруту движения, предложенному облачной сетью, как это описано для этапа 716 на фиг. 7. Маршрут движения может предложить транспортному средству больше времени и возможностей для эксплуатации транспортного средства в условиях, запрошенных облачной сетью (например, в рабочих областях, определенных как имеющие неустановившиеся управляющие параметры). Способ 300 эксплуатирует транспортное средство (например, регулирует дроссельную заслонку двигателя, фазы газораспределения, момент зажигания, передачу трансмиссии, ток мотора, воздушно-топливное отношение двигателя и т.п.) для следования по маршруту движения, предложенному облачной сетью, после чего переходит на этап 324.
На этапе 324 способ 300 получает данные и/или управляющие параметры привода в рабочих областях привода, которые были определены как имеющие неустановившиеся управляющие параметры и/или данные. Например, способ 300 может выдерживать скорость движения транспортного средства на предустановленном значении, регулируя крутящий момент двигателя и переходя на пониженную передачу для увеличения частоты вращения двигателя в умеренном режиме сбора. Тем самым, привод можно эксплуатировать при другой частоте вращения двигателя с целью сбора данных привода и для того, чтобы можно было адаптировать/отрегулировать управляющие параметры привода на различных частотах вращения двигателя. Изменения частоты вращения двигателя, частоты вращения мотора, крутящего момента двигателя, крутящего момента мотора и передачи, при которых транспортное средство эксплуатируют в умеренном режиме сбора, могут быть ощутимыми для водителя или пассажира.
В другом примере, способ 300 может эксплуатировать двигатель при постоянной частоте вращения, но изменять при этом момент зажигания (то есть, регулируя момент зажигания в сторону опережения или запаздывания относительного базового значения момента зажигания) и открывать дроссельную заслонку двигателя в умеренном режиме сбора. При этом можно определить момент зажигания ОКМ и пограничный момент зажигания по крутящему моменту двигателя и признакам детонации двигателя. Кроме того, по различным моментам зажигания можно определить температуры отработавших газов.
Еще в одном примере, могут изменять фазы кулачкового распределения (то есть, сдвигать фазы кулачкового распределения в сторону опережения или запаздывания относительно базовой установки фаз кулачкового распределения), при одновременном регулировании положения дроссельной заслонки для сохранения постоянным крутящего момента двигателя или для обеспечения требуемого крутящего момента двигателя в умеренном режиме сбора. Датчики давления в цилиндрах могут выдавать данные для нахождения индикаторного среднего эффективного давления (ИСЭД) с тем, чтобы определить устойчивость горения и требуемые установки фаз кулачкового распределения. Информация о давлении во впускном коллекторе также может быть получена для того, чтобы найти значения фаз кулачкового распределения для снижения потерь на прокачивание в двигателе.
Способ 300 также регулирует и/или адаптирует управляющие параметры в рабочих условиях, запрошенных облачной сетью в умеренном режиме сбора. Например, способ 300 может адаптировать коэффициенты усиления контроллера, передаточные функции и значения в таблицах и/или функциях, описывающих работу двигателя, мотора, трансмиссии и инвертера, путем регулирования двигателя, мотора и трансмиссии до условий, предписанных облачной сетью. Рабочий диапазон привода может быть значительно шире в режиме умеренного сбора, чем в режиме пассивного сбора. Например, в течение режима умеренного сбора, частота вращения двигателя может варьироваться на 30%, при том, что в режиме пассивного сбора частота вращения двигателя может варьироваться меньше, чем на 5%. Другие рабочие условия привода, такие как крутящий момент двигателя, частота вращения мотора, крутящий момент мотора, передача трансмиссии и ток инвертора могут быть отрегулированы аналогичным образом между пассивным и умеренным режимами сбора. Тем самым, привод можно эксплуатировать в условиях, запрошенных облачной сетью для получения данных привода и адаптации управляющих параметров привода.
В одном примере, транспортное средство может эксплуатироваться с радарным круиз-контролем, и скорость ускорения/замедления транспортного средства могут быть отрегулированы для ускорения транспортного средства медленнее, чем задано базовой скоростью ускорения. В то же время, трансмиссию могут удерживать на конкретной передаче, чтобы управляющие параметры и данные можно было собрать для условий иных, чем базовые условия круиз-контроля. То есть, на этапах 323 и 342 способ 300 регулирует маршрут движения транспортного средства, рабочие условия транспортного средства (например, положение дроссельной заслонки, момент зажигания, фазы газораспределения, ток мотора и т.п.) и получает данные и/или управляющие параметры без одобрения водителя. После эксплуатации привода в условиях, запрошенных облачной сетью, и получения данных и/или управляющих параметров, способ 300 переходит на этап 398.
На этапе 325 способ 300 представляет находящимся в транспортном средстве людям предпочтительный маршрут движения. Предпочтительным маршрутом движения может быть маршрут, который, как ожидается, предоставит больше возможностей или времени для эксплуатации привода в условиях, в которых управляющие параметры в выбранных рабочих областях будут неустановившимися. Предпочтительный маршрут движения может быть представлен находящимся в транспортном средстве людям через навигационную систему. После того, как предпочтительный маршрут движения будет представлен находящимся в транспортном средстве людям, способ 300 переходит на этап 326.
На этапе 326 способ 300 запрашивает у находящихся в транспортном средстве людей разрешение на модификацию рабочих условий привода с тем, чтобы привод работал бы в тех рабочих областях, в которых управляющие параметры являются неустановившимися. Рабочие условия привода среди прочего могут включать в себя частоту вращения двигателя, частоту вращения мотора, крутящий момент мотора, передачу трансмиссии, состояние муфты преобразования крутящего момента (например, открытая, закрытая, или некоторая степень пробуксовки), степень открытия дроссельной заслонки двигателя, положение распределительных валов двигателя, момент зажигания двигателя, потребляемый мотором ток, ток мотора при эксплуатации мотора в качестве генератора, степень наддува от турбонагнетателя. Способ 300 может запросить разрешение через дисплей или панель водительского интерфейса. После запрашивания у водителя разрешения на модификацию рабочих условий привода способ 300 переходит на этап 327.
На этапе 327 способ 300 выясняет, дали или не дали находящиеся в транспортном средстве люди разрешение на регулирование рабочих условий привода. Водитель может дать разрешение через водительский интерфейс или дисплейную панель. Если находящийся в машине человек даст разрешение, то ответ будет положительным, и способ перейдет на этап 328. В противном случае, ответ будет отрицательным, и способ перейдет на этап 340. Если разрешение будет дано, то способ также продолжит эксплуатацию транспортного средства по предпочтительному маршруту движения.
На этапе 328 способ 300 определяет моменты времени для регулирования рабочих условий привода таким образом, чтобы привод работал бы в диапазонах, где управляющие параметры неустановившиеся. В одном примере, способ 300 может выбрать моменты времени, когда транспортное средство не находится вблизи других транспортных средств. Кроме того, способ 300 может выбрать для регулирования рабочих условий привода то время, когда транспортное средство движется по участку дороги, который имеет неизменный уклон на расстоянии, большем предустановленного. Кроме того, способ 300 для регулирования рабочих условий привода может выбрать то время, когда коэффициент сцепления дороги, по которой движется транспортное средство, превышает пороговый коэффициент сцепления. После того, как будет определено время для регулирования рабочих условий привода для того, чтобы работать в пределах диапазона, в котором рабочие условия неустановившиеся, способ 300 переходит на этап 329.
На этапе 329 способ 300 получает данные, адаптирует управляющие параметры привода и/или получает управляющие параметры привода в рабочих областях привода, которые были определены как имеющие неустановившиеся управляющие параметры и/или данные в умеренном режиме сбора. Например, способ 300 может выдерживать скорость движения транспортного средства на предустановленном значении, регулируя крутящий момент двигателя и переходя на пониженную передачу для увеличения частоты вращения двигателя в умеренном режиме сбора. Тем самым, привод можно эксплуатировать при другой частоте вращения двигателя с целью сбора данных привода и для того, чтобы можно было адаптировать/отрегулировать управляющие параметры привода на различных частотах вращения двигателя. Частоты вращения двигателя, частоты вращения мотора, крутящие моменты двигателя, крутящие моменты мотора и передачи трансмиссии, на которых транспортное средство эксплуатировалось в умеренном режиме сбора в рабочих областях, имеющих неустановившиеся управляющие параметры, регулировки рабочих условий привода, выполненные относительно существующих рабочих условий, могут быть ощутимыми для водителя или пассажира.
В другом примере, способ 300 может эксплуатировать двигатель при постоянной частоте вращения, но изменять при этом момент зажигания (то есть, регулируя момент зажигания в сторону опережения или запаздывания относительного базового значения момента зажигания) и открывать дроссельную заслонку двигателя в умеренном режиме сбора. При этом можно определить момент зажигания ОКМ и пограничный момент зажигания по крутящему моменту двигателя и признакам детонации двигателя. Кроме того, по различным моментам зажигания можно определить температуры отработавших газов.
Еще в одном примере, могут изменять фазы кулачкового распределения (то есть, сдвигать фазы кулачкового распределения в сторону опережения или запаздывания относительно базовой установки фаз кулачкового распределения), при одновременном регулировании положения дроссельной заслонки для сохранения постоянным крутящего момента двигателя или для обеспечения требуемого крутящего момента двигателя в умеренном режиме сбора. Датчики давления в цилиндрах могут выдавать данные для нахождения индикаторного среднего эффективного давления (ИСЭД) с тем, чтобы определить устойчивость горения и требуемые установки фаз кулачкового распределения. Информация о давлении во впускном коллекторе также может быть получена для того, чтобы найти значения фаз кулачкового распределения для снижения потерь на прокачивание в двигателе.
Способ 300 также регулирует и/или адаптирует управляющие параметры в рабочих условиях, запрошенных облачной сетью в умеренном режиме сбора. Например, способ 300 может адаптировать коэффициенты усиления контроллера, передаточные функции и значения в таблицах и/или функциях, описывающих работу двигателя, мотора, трансмиссии и инвертера, путем регулирования двигателя, мотора и трансмиссии до условий (например, рабочие области привода), предписанных облачной сетью. Рабочий диапазон привода может быть значительно шире в режиме умеренного сбора, чем в режиме пассивного сбора. Например, в умеренном режиме сбора, частота вращения двигателя может варьироваться на 30%, при том, что в пассивном режиме сбора частота вращения двигателя может варьироваться меньше, чем на 5%. Другие рабочие условия привода, такие как крутящий момент двигателя, частота вращения мотора, крутящий момент мотора, передача трансмиссии и ток инвертора могут быть отрегулированы аналогичным образом между пассивным и умеренным режимами сбора. Тем самым, привод можно эксплуатировать в условиях, запрошенных облачной сетью для получения данных привода и адаптации управляющих параметров привода.
То есть, на этапах 328 и 329 способ 300 регулирует маршрут движения транспортного средства и получает данные и/или управляющие параметры только после получения одобрения водителя. После эксплуатации привода в условиях, запрошенных облачной сетью, и получения данных и/или управляющих параметров способ 300 переходит на этап 398.
На этапе 331 способ 300 представляет водителю транспортного средства предпочтительный маршрут движения. Предпочтительным маршрутом движения может быть маршрут, который, как ожидается, предоставит больше возможностей или времени для эксплуатации привода в условиях, в которых управляющие параметры в выбранных рабочих областях будут неустановившимися. Предпочтительный маршрут движения может быть представлен находящимся в транспортном средстве людям через навигационную систему. После того, как предпочтительный маршрут движения будет представлен водителю транспортного средства, способ 300 переходит на этап 332.
На этапе 332 способ 300 запрашивает у водителя транспортного средства разрешение на модификацию рабочих условий привода с тем, чтобы привод работал бы в тех рабочих областях, в которых управляющие параметры являются неустановившимися. Рабочие условия привода среди прочего могут включать в себя частоту вращения двигателя, крутящий момент двигателя, частоту вращения мотора, крутящий момент мотора, передачу трансмиссии, состояние муфты преобразования крутящего момента (например, открытая, закрытая, или некоторая степень пробуксовки), степень открытия дроссельной заслонки двигателя, положение распределительных валов двигателя, момент зажигания двигателя, потребляемый мотором ток, ток мотора при эксплуатации мотора в качестве генератора, степень наддува от турбонагнетателя. Способ 300 может запросить разрешение через дисплей или панель водительского интерфейса. После запрашивания у водителя разрешения на модификацию рабочих условий привода способ 300 переходит на этап 333.
На этапе 333 способ 300 выясняет, дал или не дал водитель или оператор разрешение на регулирование рабочих условий привода. Водитель может дать разрешение через водительский интерфейс или дисплейную панель. Если водитель даст разрешение, то ответ будет положительным, и способ перейдет на этап 334. В противном случае, ответ будет отрицательным, и способ перейдет на этап 340. Если разрешение будет дано, то способ 300 также продолжит эксплуатацию транспортного средства по предпочтительному маршруту движения.
На этапе 334 способ 300 выясняет, нужна ли или желательна помощь водителя для эксплуатации транспортного средства в диапазонах, где управляющие параметры привода являются неустановившимися. Например, может потребоваться помощь водителя в нажатии педали акселератора, когда транспортное средство нужно ускорить из неподвижного состояния. Если способ 300 устанавливает, что помощь водителя требуется, то ответ будет положительным, и способ 300 перейдет на этап 335. В противном случае ответ будет отрицательным, и способ перейдет на этап 337.
На этапе 335 способ 300 запрашивает помощь водителя. Помощь водителя может быть запрошена через дисплейную панель или другими средствами. После того, как помощь водителя будет запрошена, способ 300 перейдет на этап 336.
На этапе 336 способ 300 выясняет то, была ли оказана помощь водителя. Помощь водителя может считаться оказанной, если водитель осуществляет ввод в контроллер транспортного средства (например, когда водитель нажимает на педаль акселератора или педаль тормоза). Кроме того, водитель может отменить запрос о помощи, введя команду отмены на дисплейной панели. Если способ 300 установит, что помощь водителя была оказана, то ответ будет положительным, и способ 300 перейдет на этап 337. В противном случае, ответ будет отрицательным, и способ 300 перейдет на этап 340.
На этапе 337 способ 300 определяет моменты времени для регулирования рабочих условий привода таким образом, чтобы привод работал бы в диапазонах, где управляющие параметры неустановившиеся. В одном примере, способ 300 может выбрать моменты времени, когда транспортное средство не находится вблизи других транспортных средств. Кроме того, способ 300 может выбрать для регулирования рабочих условий привода то время, когда транспортное средство движется по участку дороги, который имеет неизменный уклон на расстоянии, большем предустановленного. Кроме того, способ 300 для регулирования рабочих условий привода может выбрать то время, когда коэффициент сцепления дороги, по которой движется транспортное средство, превышает пороговый коэффициент сцепления. После того, как будет определено время для регулирования рабочих условий привода для того, чтобы работать в пределах диапазона, в котором рабочие условия неустановившиеся, способ 300 переходит на этап 338.
На этапе 338 способ 300 получает данные, адаптирует управляющие параметры привода и/или управляющие параметры привода в рабочих областях привода, которые были определены как имеющие неустановившиеся управляющие параметры и/или данные в умеренном режиме сбора. Например, способ 300 может выдерживать скорость движения транспортного средства на предустановленном значении, регулируя крутящий момент двигателя и переходя на пониженную передачу для увеличения частоты вращения двигателя в умеренном режиме сбора. Тем самым, привод можно эксплуатировать при другой частоте вращения двигателя с целью сбора данных привода и для того, чтобы можно было адаптировать/отрегулировать управляющие параметры привода на различных частотах вращения двигателя. Частоты вращения двигателя, частоты вращения мотора, крутящие моменты двигателя, крутящие моменты мотора и передачи трансмиссии, на которых транспортное средство эксплуатировалось в умеренном режиме сбора в рабочих областях, имеющих неустановившиеся управляющие параметры, регулировки рабочих условий привода, выполненные относительно существующих рабочих условий, могут быть ощутимыми для водителя или пассажира.
В другом примере, способ 300 может эксплуатировать двигатель при постоянной частоте вращения, но изменять при этом момент зажигания (то есть, регулируя момент зажигания в сторону опережения или запаздывания относительного базового значения момента зажигания) и открывать дроссельную заслонку двигателя в умеренном режиме сбора. При этом можно определить момент зажигания ОКМ и пограничный момент зажигания по крутящему моменту двигателя и признакам детонации двигателя. Кроме того, по различным моментам зажигания можно определить температуры отработавших газов.
Еще в одном примере, могут изменять фазы кулачкового распределения (то есть, сдвигать фазы кулачкового распределения в сторону опережения или запаздывания относительно базовой установки фаз кулачкового распределения), при одновременном регулировании положения дроссельной заслонки для сохранения постоянным крутящего момента двигателя или для обеспечения требуемого крутящего момента двигателя в умеренном режиме сбора. Датчики давления в цилиндрах могут выдавать данные для нахождения индикаторного среднего эффективного давления (ИСЭД) с тем, чтобы определить устойчивость горения и требуемые установки фаз кулачкового распределения. Информация о давлении во впускном коллекторе также может быть собрана для того, чтобы найти значения фаз кулачкового распределения для снижения потерь на прокачивание в двигателе.
Способ 300 также регулирует и/или адаптирует управляющие параметры в рабочих условиях, запрошенных облачной сетью в умеренном режиме сбора. Например, способ 300 может адаптировать коэффициенты усиления контроллера, передаточные функции и значения в таблицах и/или функциях, описывающих работу двигателя, мотора, трансмиссии и инвертера, путем регулирования двигателя, мотора и трансмиссии до условий, предписанных облачной сетью. Рабочий диапазон привода может быть значительно шире в умеренном режиме сбора, чем в пассивном режиме сбора. Например, в течение умеренного режима сбора, частота вращения двигателя может варьироваться на 30%, при том, что в пассивном режиме сбора частота вращения двигателя может варьироваться меньше, чем на 5%. Другие рабочие условия привода, такие как крутящий момент двигателя, частота вращения мотора, крутящий момент мотора, передача трансмиссии и ток инвертора могут быть отрегулированы аналогичным образом между пассивным и умеренным режимами сбора. Тем самым, привод можно эксплуатировать в условиях, запрошенных облачной сетью для получения данных привода и адаптации управляющих параметров привода.
То есть, на этапах 337 и 338 способ 300 регулирует маршрут движения транспортного средства и получает данные и/или управляющие параметры только после получения одобрения водителя. После эксплуатации привода в условиях, запрошенных облачной сетью, и получения данных и/или управляющих параметров способ 300 переходит на этап 398.
На этапе 340 способ 300 собирает данные и регулирует или адаптирует управляющие параметры привода в рабочих условиях, возникших при ответе на запрошенный водителем крутящий момент при отсутствии регулировании контроллером рабочих условий в ответ на запрос облачной сети. Способ 300 может регулировать управляющие параметры в рабочих диапазонах привода, запрошенных облачной сетью, если водитель эксплуатирует привод в течение существования таковых условий. Способ 300 переходит на показанный на фиг.3 этап 398 после сбора данных и/или управляющих параметров в рабочих условиях, возникших в ответ на запросы водителя.
На показанном на фиг.6 этапе 350 способ 300 оценивает условия движения для эксплуатации транспортного средства в агрессивном режиме сбора. Способ 300 может войти в агрессивный режим сбора в выборочных рабочих условиях привода. Например, способ может счесть желательным агрессивный сбор управляющих параметров привода, когда в транспортном средстве находится человек, что определяется по брелоку для ключей, находящемуся поблизости сотовому телефону или как-либо по другому. Способ 300 может счесть желательным агрессивный сбор управляющих параметров привода по дорожным условиям, например, если транспортное средство движется по кольцевому испытательному треку или когда предельная скорость транспортного средства превышает пороговую скорость. Среди дополнительных дорожных условий, которые могут инициировать агрессивный сбор управляющих параметров или данных, можно назвать движение транспортного средства по автостраде, по дорогам с коэффициентом сцепления меньшим порогового, при плотности населения меньшей пороговой и при движении в темное время суток. Агрессивный сбор может быть инициирован, когда изменение рабочей области привода превышает третье пороговое изменение относительно актуальной рабочей области привода. Дополнительно, агрессивный сбор может потребовать, чтобы рабочие параметры привода находись в пределах третьего диапазона (например, частота вращения входного вала трансмиссии менее 7500 об/мин, а входной крутящий момент трансмиссии менее 500 Н-м), большего, чем второй диапазон, или чтобы изменения в рабочих параметрах привода не были бы ограничены рабочими условиями транспортного средства. Условия транспортного средства могут быть определены по показаниям датчиков транспортного средства, по глобальной системе позиционирования или по транслируемой информации.
Среди прочего, дорожные условия могут включать в себя скоростные ограничения, фактическую скорость движения транспортного средства, близость к другому транспортному средству (определяемую, например, акустическим или радарным способом), населенность области, в которой движется транспортное средство, частоту вращения двигателя, крутящий момент двигателя, частоту вращения мотора, крутящий момент мотора, выбранную передачу трансмиссии, температуру двигателя, температуру и давление окружающего воздуха, подачу топлива в двигатель, подачу воздуха в двигатель, воздушно-топливное отношение двигателя, светлое или темное время суток, коэффициент сцепления дороги и идентификационные данные присутствующего водителя. После оценивания условий движения способ 300 переходит на этап 351.
На этапе 351 способ 300 выясняет, эксплуатируется ли транспортное средство с водителем, или без него (например, автономно). В одном примере, способ выясняет, ведет ли транспортное средство водитель, по хранящемуся в памяти значению переменной, которая указывает на то, управляется ли транспортное средство водителем или контроллером. Если способ 300 выяснит, что транспортным средством управляет человек, то ответ будет положительным, и способ 300 перейдет на этап 361. В противном случае, ответ будет отрицательным, и способ 300 перейдет на этап 352.
На этапе 352 способ 300 выясняет, находится ли в транспортном средстве пассажир, если транспортное средство находится в умеренном режиме сбора. В одном примере, способ 300 выясняет присутствие пассажира по данным датчиков сидений. Альтернативно, способ 300 может регистрировать сердцебиение пассажира или присутствие пассажира акустическими датчиками. Если способ 300 выяснит, что в транспортном средстве находятся люди, то ответ будет положительным и способ 300 перейдет на этап 355. В противном случае, ответ будет отрицательным и способ 300 перейдет на этап 353.
На этапе 353 способ 300 переходит к направлению транспортного средства следовать по маршруту движения, предложенному облачной сетью, как это описано для этапа 716 на фиг. 7. Маршрут движения может предложить транспортному средству больше времени и возможностей для эксплуатации транспортного средства в условиях, запрошенных облачной сетью (например, в рабочих областях, определенных как имеющие неустановившиеся управляющие параметры). Способ 300 эксплуатирует транспортное средство (например, регулирует дроссельную заслонку двигателя, фазы газораспределения, момент зажигания, передачу трансмиссии, ток мотора, воздушно-топливное отношение двигателя и т.п.) для следования по маршруту движения, предложенному облачной сетью, после чего переходит на этап 354.
На этапе 354 способ 300 в агрессивном режиме сбора получает данные и/или управляющие параметры привода в рабочих областях привода, которые были определены как имеющие неустановившиеся управляющие параметры и/или данные. Например, способ 300 может выдерживать скорость движения транспортного средства на предустановленном значении, регулируя крутящий момент двигателя и переходя на пониженную передачу для увеличения частоты вращения двигателя в умеренном режиме сбора. Тем самым, привод можно эксплуатировать при другой частоте вращения двигателя с целью сбора данных привода и для того, чтобы можно было адаптировать/отрегулировать управляющие параметры привода на различных частотах вращения двигателя. Изменения частоты вращения двигателя, частоты вращения мотора, крутящего момента двигателя, крутящего момента мотора и передачи, при которых транспортное средство эксплуатируют в агрессивном режиме сбора, могут быть ощутимыми для водителя или пассажира. В одном примере, привод может эксплуатироваться в агрессивном режиме в полной степени. Например, дроссельная заслонка двигателя может быть открыта полностью, и на трансмиссию может подаваться полный крутящий момент двигателя и/или мотора.
В другом примере, способ 300 может эксплуатировать двигатель при постоянной частоте вращения, но изменять при этом момент зажигания (то есть, регулируя момент зажигания в сторону опережения или запаздывания относительного базового значения момента зажигания) и открывать дроссельную заслонку двигателя в агрессивном режиме сбора. При этом можно определить момент зажигания ОКМ и пограничный момент зажигания по крутящему моменту двигателя и признакам детонации двигателя. Кроме того, по различным моментам зажигания можно определить температуры отработавших газов.
Еще в одном примере, могут изменять фазы кулачкового распределения (то есть, сдвигать фазы кулачкового распределения в сторону опережения или запаздывания относительно базовой установки фаз кулачкового распределения), при одновременном регулировании положения дроссельной заслонки для сохранения постоянным крутящего момента двигателя или для обеспечения требуемого крутящего момента двигателя в агрессивном режиме сбора. Датчики давления в цилиндрах могут выдавать данные для нахождения индикаторного среднего эффективного давления (ИСЭД) с тем, чтобы определить устойчивость горения и требуемые установки фаз кулачкового распределения. Информация о давлении во впускном коллекторе также может быть получена для того, чтобы найти значения фаз кулачкового распределения для снижения потерь на прокачивание в двигателе.
Способ 300 также регулирует и/или адаптирует управляющие параметры в рабочих условиях, запрошенных облачной сетью в агрессивном режиме сбора. Например, способ 300 может адаптировать коэффициенты усиления контроллера, передаточные функции и значения в таблицах и/или функциях, описывающих работу двигателя, мотора, трансмиссии и инвертера, путем регулирования двигателя, мотора и трансмиссии до условий, предписанных облачной сетью. Рабочий диапазон привода может быть значительно шире в агрессивном режиме сбора, чем в пассивном или умеренном режимах сбора. Например, в агрессивном режиме сбора, частота вращения двигателя может варьироваться до верхнего предела рабочего диапазона двигателя, в то время как в умеренном режиме сбора частота вращения двигателя может быть варьирована менее, чем на 30%, а частота вращения двигателя может поддерживаться менее пороговой частоты вращения, при том, что пороговая частота вращения меньше максимальной частоты вращения двигателя. Другие рабочие условия привода, такие как крутящий момент двигателя, частота вращения мотора, крутящий момент мотора, передача трансмиссии и ток инвертора могут быть отрегулированы аналогичным образом между агрессивным и умеренным режимами сбора. Тем самым, привод можно эксплуатировать в условиях, запрошенных облачной сетью, для получения данных привода и адаптации управляющих параметров привода.
То есть, на этапах 353 и 354 способ 300 регулирует маршрут движения транспортного средства и получает данные и/или управляющие параметры без получения одобрения водителя. После эксплуатации привода в условиях, запрошенных облачной сетью, и получения данных и/или управляющих параметров способ 300 переходит на этап 398.
На этапе 355 способ 300 представляет находящимся в транспортном средстве людям предпочтительный маршрут движения. Предпочтительным маршрутом движения может быть маршрут, который, как ожидается, предоставит больше возможностей или времени для эксплуатации привода в условиях, в которых управляющие параметры в выбранных рабочих областях будут неустановившимися. Предпочтительный маршрут движения может быть представлен находящимся в транспортном средстве людям через навигационную систему. После того, как предпочтительный маршрут движения будет представлен находящимся в транспортном средстве людям, способ 300 переходит на этап 356.
На этапе 356 способ 300 запрашивает у находящихся в транспортном средстве разрешение на модификацию рабочих условий привода с тем, чтобы привод работал бы в тех рабочих областях, в которых управляющие параметры являются неустановившимися. Рабочие условия привода среди прочего могут включать в себя частоту вращения двигателя, крутящий момент двигателя, частоту вращения мотора, крутящий момент мотора, передачу трансмиссии, состояние муфты преобразования крутящего момента (например, открытая, закрытая, или некоторая степень пробуксовки), степень открытия дроссельной заслонки двигателя, положение распределительных валов двигателя, момент зажигания двигателя, потребляемый мотором ток, ток мотора при эксплуатации мотора в качестве генератора, степень наддува от турбонагнетателя. Способ 300 может запросить разрешение через дисплей или панель водительского интерфейса. После запрашивания разрешения на модификацию рабочих условий привода способ 300 переходит на этап 357.
На этапе 357 способ 300 выясняет, дали или не дали находящиеся в транспортном средстве люди разрешение на регулирование рабочих условий привода. Водитель может дать разрешение через водительский интерфейс или дисплейную панель. Если находящийся в транспортном средстве человек даст разрешение, то ответ будет положительным и способ перейдет на этап 358. В противном случае, ответ будет отрицательным, и способ перейдет на этап 370. Если разрешение будет дано, то способ 300 также продолжит эксплуатацию транспортного средства по предпочтительному маршруту движения.
На этапе 358 способ 300 определяет моменты времени для регулирования рабочих условий привода таким образом, чтобы привод работал бы в диапазонах, где управляющие параметры неустановившиеся. В одном примере, способ 300 может выбрать моменты времени, когда транспортное средство не находится вблизи других транспортных средств. Кроме того, способ 300 может выбрать для регулирования рабочих условий привода то время, когда транспортное средство движется по участку дороги, который имеет неизменный уклон на расстоянии, большем предустановленного. Кроме того, способ 300 для регулирования рабочих условий привода может выбрать то время, когда коэффициент сцепления дороги, по которой движется транспортное средство, превышает пороговый коэффициент сцепления. После того, как будет определено время для регулирования рабочих условий привода для того, чтобы работать в пределах диапазона, в котором рабочие условия неустановившиеся, способ 300 переходит на этап 359.
На этапе 359 способ 300 получает данные, адаптирует управляющие параметры привода и/или получает управляющие параметры привода в рабочих областях привода, которые были определены как имеющие неустановившиеся управляющие параметры и/или данные в агрессивном режиме сбора. Например, способ 300 может выдерживать скорость движения транспортного средства на предустановленном значении, регулируя крутящий момент двигателя и переходя на пониженную передачу для увеличения частоты вращения двигателя в агрессивном режиме сбора. Тем самым, привод можно эксплуатировать при другой частоте вращения двигателя с целью сбора данных привода и для того, чтобы можно было адаптировать/отрегулировать управляющие параметры привода на различных частотах вращения двигателя. Частоты вращения двигателя, частоты вращения мотора, крутящие моменты двигателя, крутящие моменты мотора и передачи трансмиссии, на которых транспортное средство эксплуатировалось в умеренном режиме сбора в рабочих областях, имеющих неустановившиеся управляющие параметры, регулировки рабочих условий привода, выполненные относительно существующих рабочих условий, могут быть ощутимыми для водителя или пассажира.
В другом примере, способ 300 может эксплуатировать двигатель при постоянной частоте вращения, но изменять при этом момент зажигания (то есть, регулируя момент зажигания в сторону опережения или запаздывания относительного базового значения момента зажигания) и открывать дроссельную заслонку двигателя в умеренном режиме сбора. При этом можно определить момент зажигания ОКМ и пограничный момент зажигания по крутящему моменту двигателя и признакам детонации двигателя. Кроме того, по различным моментам зажигания можно определить температуры отработавших газов.
Еще в одном примере, могут изменять фазы кулачкового распределения (то есть, сдвигать фазы кулачкового распределения в сторону опережения или запаздывания относительно базовой установки фаз кулачкового распределения), при одновременном регулировании положения дроссельной заслонки для сохранения постоянным крутящего момента двигателя или для обеспечения требуемого крутящего момента двигателя в агрессивном режиме сбора. Датчики давления в цилиндрах могут выдавать данные для нахождения индикаторного среднего эффективного давления (ИСЭД) с тем, чтобы определить устойчивость горения и требуемые установки фаз кулачкового распределения. Информация о давлении во впускном коллекторе также может быть получена для того, чтобы найти значения фаз кулачкового распределения для снижения потерь на прокачивание в двигателе.
Способ 300 также регулирует и/или адаптирует управляющие параметры в рабочих условиях, запрошенных облачной сетью в агрессивном режиме сбора. Например, способ 300 может адаптировать коэффициенты усиления контроллера, передаточные функции и значения в таблицах и/или функциях, описывающих работу двигателя, мотора, трансмиссии и инвертера, путем регулирования двигателя, мотора и трансмиссии до условий (например, рабочих областей привода), предписанных облачной сетью. Рабочий диапазон привода может быть значительно шире в режиме агрессивного сбора, чем в режиме пассивного сбора и умеренного сбора. Например, в агрессивном режиме сбора, частота вращения двигателя поднимается до максимальной частоты вращения двигателя, в то время как в умеренном и пассивном режимах сбора частота вращения двигателя может быть ограничена до значения, меньшего максимальной частоты вращения двигателя. Другие рабочие условия привода, такие как крутящий момент двигателя, частота вращения мотора, крутящий момент мотора, передача трансмиссии и ток инвертора могут быть отрегулированы аналогичным образом между пассивным и умеренным режимами сбора. Тем самым, привод можно эксплуатировать в условиях, запрошенных облачной сетью для получения данных привода и адаптации управляющих параметров привода.
То есть, на этапах 358 и 359 способ 300 регулирует маршрут движения транспортного средства и получает данные и/или управляющие параметры только после получения одобрения водителя. После эксплуатации привода в условиях, запрошенных облачной сетью, и получения данных и/или управляющих параметров способ 300 переходит на этап 398.
На этапе 361 способ 300 представляет водителю предпочтительный маршрут движения. Предпочтительным маршрутом движения может быть маршрут, который, как ожидается, предоставит больше возможностей или времени для эксплуатации привода в условиях, в которых управляющие параметры в выбранных рабочих областях будут неустановившимися. Предпочтительный маршрут движения может быть представлен находящимся в транспортном средстве людям через навигационную систему. После того, как предпочтительный маршрут движения будет представлен находящимся в транспортном средстве людям, способ 300 переходит на этап 362.
На этапе 362 способ 300 запрашивает у водителя разрешение на модификацию рабочих условий привода с тем, чтобы привод работал бы в тех рабочих областях, в которых управляющие параметры являются неустановившимися. Рабочие условия привода среди прочего могут включать в себя частоту вращения двигателя, крутящий момент двигателя, частоту вращения мотора, крутящий момент мотора, передачу трансмиссии, состояние муфты преобразования крутящего момента (например, открытая, закрытая, или некоторая степень пробуксовки), степень открытия дроссельной заслонки двигателя, положение распределительных валов двигателя, момент зажигания двигателя, потребляемый мотором ток, ток мотора при эксплуатации мотора в качестве генератора, степень наддува от турбонагнетателя. Способ 300 может запросить разрешение через дисплей или панель водительского интерфейса. После запрашивания у водителя разрешения на модификацию рабочих условий привода способ 300 переходит на этап 363.
На этапе 363 способ 300 выясняет, дал или не дал водитель или оператор разрешение на регулирование рабочих условий привода. Водитель может дать разрешение через водительский интерфейс или дисплейную панель. Если водитель даст разрешение, то ответ будет положительным и способ перейдет на этап 364. В противном случае, ответ будет отрицательным, и способ перейдет на этап 370. Если разрешение будет дано, то способ 300 также продолжит эксплуатацию транспортного средства по предпочтительному маршруту движения.
На этапе 364 способ 300 выясняет, нужна ли или желательна помощь водителя для эксплуатации транспортного средства в диапазонах, где управляющие параметры привода являются неустановившимися. Например, может потребоваться помощь водителя в нажатии педали акселератора, когда транспортное средство нужно ускорить из неподвижного состояния. Если способ 300 устанавливает, что помощь водителя требуется, то ответ будет положительным, и способ 300 перейдет на этап 365. В противном случае ответ будет отрицательным, и способ перейдет на этап 367.
На этапе 365 способ 300 запрашивает помощь водителя. Помощь водителя может быть запрошена через дисплейную панель или другими средствами. После того, как помощь водителя будет запрошена, способ 300 перейдет на этап 366.
На этапе 366 способ 300 выясняет то, была ли оказана помощь водителем. Помощь водителя может считаться оказанной, если водитель осуществляет ввод в контроллер транспортного средства (например, когда водитель нажимает на педаль акселератора или педаль тормоза). Кроме того, водитель может отменить запрос о помощи, введя команду отмены на дисплейной панели. Если способ 300 установит, что помощь водителя была оказана, то ответ будет положительным, и способ 300 перейдет на этап 367. В противном случае, ответ будет отрицательным и способ 300 перейдет на этап 370.
На этапе 367 способ 300 определяет моменты времени для регулирования рабочих условий привода таким образом, чтобы привод работал бы в диапазонах, где управляющие параметры неустановившиеся. В одном примере, способ 300 может выбрать моменты времени, когда транспортное средство не находится вблизи других транспортных средств. Кроме того, способ 300 может выбрать для регулирования рабочих условий привода то время, когда транспортное средство движется по участку дороги, который имеет неизменный уклон на расстоянии, большем предустановленного. Кроме того, способ 300 для регулирования рабочих условий привода может выбрать то время, когда коэффициент сцепления дороги, по которой движется транспортное средство, превышает пороговый коэффициент сцепления. После того, как будет определено время для регулирования рабочих условий привода для того, чтобы работать в пределах диапазона, в котором рабочие условия неустановившиеся, способ 300 переходит на этап 368.
На этапе 368 способ 300 получает данные, адаптирует управляющие параметры привода и/или получает управляющие параметры привода в рабочих областях привода, которые были определены как имеющие неустановившиеся управляющие параметры и/или данные в умеренном режиме сбора. Например, способ 300 может выдерживать скорость движения транспортного средства на предустановленном значении, регулируя крутящий момент двигателя и переходя на пониженную передачу для увеличения частоты вращения двигателя в умеренном режиме сбора. Тем самым, привод можно эксплуатировать при другой частоте вращения двигателя с целью сбора данных привода и для того, чтобы можно было адаптировать/отрегулировать управляющие параметры привода на различных частотах вращения двигателя. Частоты вращения двигателя, частоты вращения мотора, крутящие моменты двигателя, крутящие моменты мотора и передачи трансмиссии, на которых транспортное средство эксплуатировалось в агрессивном режиме сбора, могут быть ощутимыми для водителя или пассажира.
В другом примере, способ 300 может эксплуатировать двигатель при постоянной частоте вращения, но изменять при этом момент зажигания (то есть, регулируя момент зажигания в сторону опережения или запаздывания относительного базового значения момента зажигания) и открывать дроссельную заслонку двигателя в агрессивном режиме сбора. При этом можно определить момент зажигания ОКМ и пограничный момент зажигания по крутящему моменту двигателя и признакам детонации двигателя. Кроме того, по различным моментам зажигания можно определить температуры отработавших газов.
Еще в одном примере, могут изменять фазы кулачкового распределения (то есть, сдвигать фазы кулачкового распределения в сторону опережения или запаздывания относительно базовой установки фаз кулачкового распределения), при одновременном регулировании положения дроссельной заслонки для сохранения постоянным крутящего момента двигателя или для обеспечения требуемого крутящего момента двигателя в агрессивном режиме сбора. Датчики давления в цилиндрах могут выдавать данные для нахождения индикаторного среднего эффективного давления (ИСЭД) с тем, чтобы определить устойчивость горения и требуемые установки фаз кулачкового распределения. Информация о давлении во впускном коллекторе также может быть получена для того, чтобы найти значения фаз кулачкового распределения для снижения потерь на прокачивание в двигателе.
Способ 300 также регулирует и/или адаптирует управляющие параметры в рабочих условиях, запрошенных облачной сетью в агрессивном режиме сбора. Например, способ 300 может адаптировать коэффициенты усиления контроллера, передаточные функции и значения в таблицах и/или функциях, описывающих работу двигателя, мотора, трансмиссии и инвертера, путем регулирования двигателя, мотора и трансмиссии до условий (например, рабочих областей привода), предписанных облачной сетью. Рабочий диапазон привода может быть значительно шире в режиме агрессивного сбора, чем в умеренном режиме сбора. Например, в агрессивном режиме сбора, частота вращения двигателя может подниматься до максимальной частоты вращения двигателя, в то время как в умеренном режиме сбора частота вращения двигателя может быть ограничена до значения, меньшего предустановленной частоты вращения двигателя (например, 3000 об/мин). Другие рабочие условия привода, такие как крутящий момент двигателя, частота вращения мотора, крутящий момент мотора, передача трансмиссии и ток инвертора могут быть отрегулированы аналогичным образом между умеренным и агрессивным режимами сбора. Тем самым, привод можно эксплуатировать в условиях, запрошенных облачной сетью для получения данных привода и адаптации управляющих параметров привода.
Таким образом, на этапах 367 и 368 способ 300 регулирует маршрут движения транспортного средства и получает данные и/или управляющие параметры только после получение одобрения водителя. После эксплуатации привода в условиях, запрошенных облачной сетью, и получения данных и/или управляющих параметров, способ 300 переходит на этап 398.
На этапе 370 способ 300 собирает данные и регулирует или адаптирует управляющие параметры в условиях эксплуатации, возникших, когда выполнялся ответ на запрошенный водителем крутящий момент без того, чтобы контроллер привода регулировал бы рабочие условия в ответ на запрос дистанционной облачной сети. Способ 300 может регулировать управляющие параметры в рабочих диапазонах привода, запрошенных облачной сетью, если водитель управляет приводом в течение этих условий. После сбора данных и/или управляющих параметров в рабочих условиях, возникших в результате запросов водителя, способ 300 переходит на этап 398, показанный на фиг. 3.
Таким образом, показанный на фиг. 3 способ может регулировать рабочие условия двигателя в соответствии с запросом от облачной сети на определение управляющих параметров привода в рабочих диапазонах привода, где управляющие параметры привода являются неустановившимися. Кроме того, способ 300 может регулировать и определять управляющие параметры привода в рабочих областях привода (например, частот вращений и крутящих моментов), в которых водитель или оператор запрашивают работу. Параметры работы привода могут быть доставлены в облачную сеть и переданы другим транспортным средствам для сокращения времени на разработку управляющих параметров привода.
Также следует отметить, что способ 300 может прервать пассивный, умеренный и агрессивный режимы сбора в любой момент, если показания транспортного средства указывают на существование условий, которые могут быть нежелательными для режимов сбора. Например, если на дороге имеется препятствие или если температура двигателя слишком высока, способ 300 может передать управление водителю или вывести транспортное средство на обочину и оставить там работать на холостом ходу.
На фиг. 7 показан пример способа, посредством которого облачная сеть может картировать управляющие параметров привода. Облачная сеть может оптимизировать и эксплуатировать привод транспортного средства в изменяющихся рабочих условиях для определения управляющих параметров привода (например, картирования), таких как минимальный момент зажигания для ОКМ, временные постоянные заполнения коллектора, передаточные функции датчиков и исполнительных устройств, а также других управляющих параметров привода. Кроме того, облачная сеть может также определить рабочие области привода, в которых управляющие параметры привода являются неустановившимися, что требует адаптации и корректировки. Показанный на фиг.7 способ может быть встроен в показанную на фиг. 1 и фиг. 2 систему в виде исполняемых инструкций.
На этапе 702 способ 700 избирательно обновляет или корректирует управляющие параметры привода и/или данные привода для группы транспортных средств, работающих по управляющим параметрам привода. Управляющие параметры привода могут быть предложены одним или более транспортными средствами, работающими с управляющими параметрами привода. Одно или несколько транспортных средств могут транслировать запрос на подгрузку данных и/или управляющих параметров на облачную сеть по радиочастотной коммуникационной сети. Облачная сеть может принять или отвергнуть запрос. Если облачная сеть принимает запрос, то облачная сеть корректирует управляющие параметры, хранящиеся в базе данных управляющих параметров, которые используются в некотором количестве транспортных средств, включающих в себя привод, аналогичный приводу транспортного средства, запрашивающий подгрузку управляющих параметров. После получения запросов на подгрузку данных и/или управляющих параметров транспортного средства способ 700 переходит на этап 704.
На этапе 704 способ 700 выясняет то, запланирована ли интрузия рабочих условий транспортного средства для получения данных и/или управляющих параметров. Интрузия может выполняться через заданные интервалы времени (например, ежемесячно или еженедельно). Альтернативно, администратор облака может запросить интрузию условий движения транспортного средства через облачную сеть. Если способ 700 постановит, что интрузия запланирована, то способ 700 перейдет на этап 712. В противном случае, способ перейдет на этап 706.
На этапе 706 способ 300 определяет хранящиеся в базе данных облака рабочие области привода, включающие в себя неустановившиеся значения управляющих параметров привода. Рабочие области привода среди прочего могут включать в себя диапазоны частот вращения двигателя (например, 1000 об/мин - 2000 об/мин), диапазоны крутящего момента двигателя (например, 5 Н-м - 400 Н-м), диапазоны крутящего момента мотора (например, 0 Н-м - 200 Н-м), диапазоны частоты вращения мотора (например, 0 об/мин - 1000 об/мин), диапазоны входных частот вращения трансмиссии (например, 0 об/мин - 6000 об/мин), диапазоны входного крутящего момента трансмиссии (например, 0 - Н-м - 500 Н-м), диапазоны входного тока мотора (например, 1-200 А), диапазоны выходного тока мотора (например, 1-100 А), диапазоны входного тока инвертора (например, 1-200 А), диапазоны выходного тока инвертора (например, 1-300 А).
Неустановившиеся значения управляющего параметра привода являются хранящимися в базе данных облачной сети переменными значениями, которые являются основой для управляющих команд, рабочих состояний контроллера и управляющих переменных, которые не были отрегулированы по рабочим условиям транспортных средств в группе некоторого количества транспортных средств, которые могут работать с управляющими параметрами из базы данных облачной сети. Неустановившиеся управляющие параметры привода могут считаться подразумеваемыми управляющими параметрами привода, так как они не были отрегулированы по транспортным средствам в группе некоторого количества транспортных средств, которые могут работать с управляющими параметрами из базы данных сети. Управляющие параметры привода, являющиеся подразумеваемыми параметрами, могут сохраняться в индивидуальных переменных, в таблицах и/или функциях внутри базы данных.
В одном примере, подразумеваемые управляющие параметры привода могут содержать предустановленные значения. Если предустановленные значения изменились относительно подразумеваемых значений, то можно определить, что конкретные управляющие параметры привода уже не являются подразумеваемыми или неустановившимися управляющими параметрами привода. В других примерах может быть выделена область памяти облачной сети, включающая в себя биты памяти, указывающие на то, был или не был адаптирован или отрегулирован конкретный отдельный управляющий параметр привода по рабочим условиям транспортного средства группы некоторого количества транспортных средств, которые могут работать с управляющими параметрами из сетевой базы данных. Если конкретный управляющий параметр привода был отрегулирован, то значение бита можно поменять с нуля на единицу. По хранящимся в памяти значениям переменных способ 300 выясняет, являются ли конкретные управляющие параметры неустановившимися или установившимися (например, отрегулированными по рабочим условиям транспортного средства транспортных средств группы некоторого количества транспортных средств, которые могут работать с управляющими параметрами из сетевой базы данных). Идентифицируются подразумеваемые или неустановившиеся управляющие параметры привода и идентифицируется их положение в таблицах и/или функции. Например, неустановившимися могут быть указаны данные, располагающиеся в ячейках данных, начиная со столбца 3, строки 2 до столбца 5, строки 2 таблицы, описывающей минимальный момент зажигания ОМК. Строка 2 таблицы может соответствовать 700 об/мин, а столбцы 3-5 могут соответствовать крутящему моменту двигателя в 40-60 Н-м. Способ 700 переходит на этап 702 после определения того, какие из рабочих областей и управляющих переменных привода являются неустановившимися, если таковые найдутся.
На этапе 708 способ 700 выясняет, являются ли данные в базе данных облачной сети разреженными. Способ 700 может постановить, что данные в базе данных облачной сети являются разреженными, если база данных облачной сети включает в себя неустановившиеся значения управляющих параметров привода. Если способ 700 устанавливает, что данные в базе данных облачной сети разрежены, то ответ будет положительным, и способ перейдет на этап 712. В противном случае, ответ будет отрицательным, и способ 700 перейдет на этап 710.
На этапе 710 способ 700 не собирает интрузивно данные и/или управляющие параметры привода от транспортного средства. То есть, если значения в базе данных облачной сети являются установившимися, то облачная сеть не требует последующих обновлений базы данных, и выполнение способа 700 прекращается.
На этапе 712 способ 700 определяет рабочие области привода для сбора данных и/или получения управляющих параметров привода. Запрос на сбор данных привода может поступить от облачной сети для оптимизации управляющих параметров. Полученные данные могут описывать работу двигателя среди прочего моментом зажигания, выходным крутящим моментом мотора, выходным крутящим моментом двигателя, температурой хладагента двигателя, температурой и давлением окружающего воздуха, скоростью движения транспортного средства, давлением масла в двигателе и трансмиссии, температурой отработавших газов двигателя, установкой фаз газораспределения, частотой вращения двигателя, воздушно-топливным отношением, потоком воздуха в двигатель, подачей топлива в двигатель, током мотора. Управляющие параметры привода среди прочего могут включать в себя момент зажигания ОКМ, пограничный момент зажигания, постоянные времени заполнения впускного коллектора двигателя, передаточные функции датчиков и исполнительных устройств, коэффициенты усиления контроллера двигателя (например, коэффициенты усиления контроллера клапана рециркуляции отработавших газов), коэффициенты усиления контроллера двигателя, передаточные функции муфты трансмиссии и прочие управляющие параметры привода.
В одном примере, способ 700 определяет рабочую область привода для сбора данных и/или получения управляющих параметров привода в качестве частот вращения и крутящих моментов привода, для которых данные и/или управляющие параметры в базе данных облачной сети являются неустановившимися. Например, если управляющие параметры двигателя для частоты вращения двигателя 2000 об/мин и крутящего момента 50 Н-м не были адаптированы или отрегулированы по рабочим условиям транспортного средства, способ 700 выбирает частоту вращения 2000 об/мин и крутящий момент 50 Н-м в качестве рабочей области привода для сбора данных и/или получения управляющих параметров привода. После того, как рабочие области привода были определены, способ 700 переходит на этап 714.
На этапе 714 способ 700 идентифицирует транспортные средства - кандидаты для интрузивного сбора данных (например, сбор данных и/или сбор параметров на основании рабочих условий привода согласно запросу от облачной сети). В одном примере, способ 700 выбирает транспортные средства по конфигурации привода. В частности, могут быть выбраны транспортные средства, имеющие привод, соответствующий базе данных, хранящейся в облачной сети (например, привод с обычным двигателем и трансмиссией или гибридный привод, включающую в себя двигатель, трансмиссию и мотор). Кроме того, может быть выбрано транспортное средство, движущееся по предписанной траектории (например, транспортное средство на кольцевом испытательном треке, или транспортное средство, движущееся по проселочной дороге), основываясь на рабочей области привода для сбора данных и/или параметров привода. Дополнительно, выбор транспортного средства или транспортных средств может основываться на условиях окружающей среды, в которых эксплуатируется транспортное средство (например, коэффициент сцепления дорожного полотна, температура окружающего воздуха, атмосферное давление, влажность окружающего воздуха). Кроме перечисленного, транспортное средство могут выбирать, основываясь на профиле водителя (например, атрибутах, характеризующих водителя либо как агрессивного, либо как неагрессивного). После того, как будут выбраны одно или несколько транспортных средств для сбора данных и/или управляющих параметров привода, способ 700 переходит на этап 716.
На этапе 716 способ запрашивает сбор данных и/или управляющих параметров в рабочей области, определенной на этапе 712, от транспортных средств, выбранных на этапе 714. В одном примере способ 700 запрашивает данные и/или управляющие параметры привода посредством трансляции запроса по радиочастотной коммуникационной системе. Способ 700 может также предложить маршруты движения для того, чтобы по ним следовали одно или несколько транспортных средств для получения данных и/или управляющих параметров привода. Маршруты движения могут основываться на дистанционной информации от спутниковой глобальной системы позиционирования и на картах, указывающих уклон и высоты дорог. После запроса получения данных и/или управляющих параметров привода, способ 700 переходит на этап 718.
На этапе 718 способ 700 извлекает данные и/или управляющие параметры привода из транспортных средств, выбранных на этапе 714. Данные и/или управляющие параметры привода могут быть извлечены по радиочастотной коммуникационной системе. После извлечения данных и/или управляющих параметров привода способ 700 переходит на этап 720.
На этапе 720 способ 700 регулирует значения в базе данных облачной сети, являющиеся основой для эксплуатации привода. Способ 700 сначала может проверить то, находятся ли в предписанных пределах данные и/или управляющие параметры, подгруженные из транспортных средств на этапе 718 в рабочую область, определенную на этапе 712. Если данные не выходят за предписанные пределы, база данных облачной сети обновляется или корректируется по значениям, собранным с транспортных средств на этапе 718. После корректирования значений в базе данных способ 700 переходит на этап 722.
На этапе 722 способ загружает в остальные транспортные средства данные и/или управляющие параметры из базы данных системы облачной сети. Данные и/или управляющие параметры могут быть загружены в остальные транспортные средства (например, транспортные средства, иные чем транспортное средство, собирающее данные) по радиочастотной коммуникационной системе. Остальные транспортные средства затем эксплуатируют на основе загруженных в них данных и/или управляющих параметров. После того, как данные и/или управляющие параметры будут загружены в остальные транспортные средства, выполнение способа 700 завершается.
Таким образом, облачная сеть может направить транспортное средство работать в условиях неустановившихся управляющих параметров привода, с той целью, чтобы транспортное средство могло адаптировать управляющие параметры привода и подгрузить их в облачную сеть. Кроме того, облачная сеть может оптимизировать управляющие параметры привода и загрузить управляющие параметры привода в другие транспортные средства. Кроме того, транспортные средства могут эксплуатироваться автономно с целью снижения временных затрат, требующихся человеку для определения управляющих параметров привода. Раскрытые здесь способы применимы к транспортному средству, работающему на дороге или испытательном треке.
То есть, показанные на фиг. 3 - фиг. 7 способы обеспечивают способ эксплуатации привода, содержащий: получение условий картирования параметра привода от сети, дистанционной относительно транспортного средства, в контроллер транспортного средства; и регулирование посредством контроллера рабочих условий привода до условий картирования параметра привода. Способ также включает в себя определение одного или более управляющих параметров в условиях картирования параметра привода и сохранение одного или более управляющих параметров в памяти. Способ также включает в себя подгрузку одного или нескольких управляющих параметров в сеть, дистанционную относительно транспортного средства. Способ также включает в себя загрузку одного или нескольких управляющих параметров в другие транспортные средства.
В некоторых примерах, способ также включает в себя эксплуатацию остальных транспортных средств на основе одного или более управляющих параметров. Способ включает в себя то, что рабочие условия привода включают в себя частоту вращения и крутящий момент мотора. Способ включает в себя то, что рабочие условия привода включают в себя частоту вращения и крутящий момент двигателя.
Способ включает в себя то, что рабочие условия привода включают в себя заданную передачу трансмиссии.
Показанные на фиг. 3 - фиг. 7 способы также обеспечивают способ эксплуатации привода, содержащий: получение условий картирования параметра привода от сети, дистанционной относительно транспортного средства, в контроллер транспортного средства; регулирование посредством контроллера рабочих условий привода до условий картирования параметра привода; и вход в один из трех режимов сбора данных, включающих в себя пассивный режим, умеренный режим и агрессивный режим. Способ включает в себя то, что имеются только три режима сбора данных, причем пассивный режим включает в себя регулирование рабочих условий привода без разрешения водителя. Способ включает в себя то, что величина регулировок рабочих условий привода в пассивном режиме меньше, чем в умеренном режиме. Способ включает в себя то, что величина регулировок рабочих условий привода в умеренном режиме меньше, чем в пассивном режиме.
В некоторых примерах, способ включает в себя то, что водителя уведомляют о запросе на регулирование рабочих условий привода. Способ также включает в себя то, что водителя запрашивают изменить входные данные транспортного средства. Способ также включает в себя то, что транспортное средство ведут автономно без водителя.
Показанные на фиг. 3 - фиг. 7 способы также обеспечивают способ эксплуатации привода, содержащий: транслирование условий картирования параметра привода от сети, дистанционной относительно транспортного средства, в контроллер транспортного средства в ответ на один или несколько подразумеваемых управляющих параметров привода; регулирование рабочих условий привода до условий картирования параметра привода, причем условия картирования параметра привода являются основой для регулирования подразумеваемых управляющих параметров привода; и вход в режим сбора данных. Способ включает в себя то, что двигатель привода эксплуатируют при постоянной частоте вращения при рабочих условиях привода.
В некоторых примерах, способ включает в себя то, что рабочие условия привода включают в себя положение дроссельной заслонки и передачу трансмиссии. Способ также включает в себя оценивание условий движения, и невыполнение регулирования рабочих условий привода в случае, если условия движения не соответствуют предустановленным условиям движения. Способ также включает в себя невыполнение регулирования рабочих условий привода в ответ на подачу водителем воздействия в контроллер.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут выполняться системой управления, включающей в себя контроллер в комбинации с разнообразными датчиками, исполнительными устройствами и другими компонентами аппаратной части двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Что подразумевает, что проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, в которой раскрытые действия реализуются выполнением инструкций в системе, содержащей разнообразные компоненты аппаратной части двигателя в комбинации с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ НАГНЕТАТЕЛЕМ | 2017 |
|
RU2712536C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2017 |
|
RU2683589C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2631150C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И СИЛОВОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2673296C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ШУМА, ВИБРАЦИИ И РЕЗКОСТИ РАБОТЫ СИЛОВОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2696175C2 |
| СИСТЕМА И СПОСОБ ПРИМЕНЕНИЯ АКТИВНОГО МЕХАНИЗМА НАТЯЖЕНИЯ РЕМНЯ ВСТРОЕННОГО СТАРТЕРА-ГЕНЕРАТОРА С РЕМЕННОЙ ПЕРЕДАЧЕЙ | 2018 |
|
RU2688613C1 |
| СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА И ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2689228C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2624481C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИЛОВОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2569212C1 |
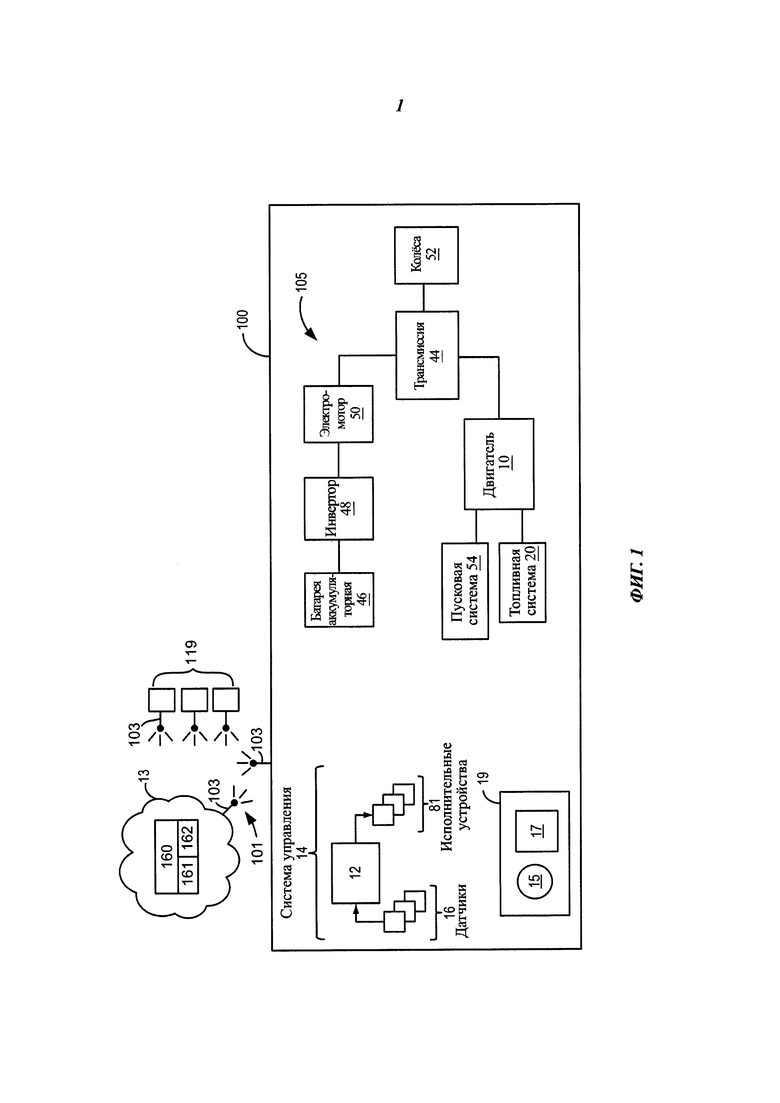
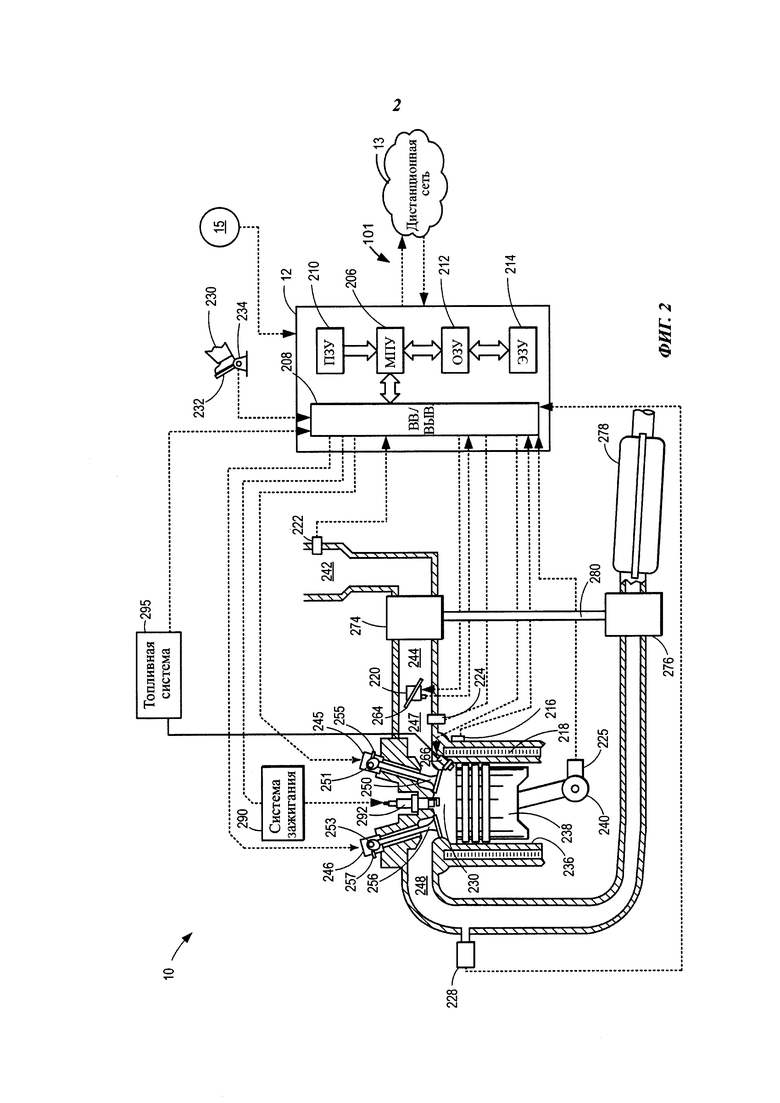
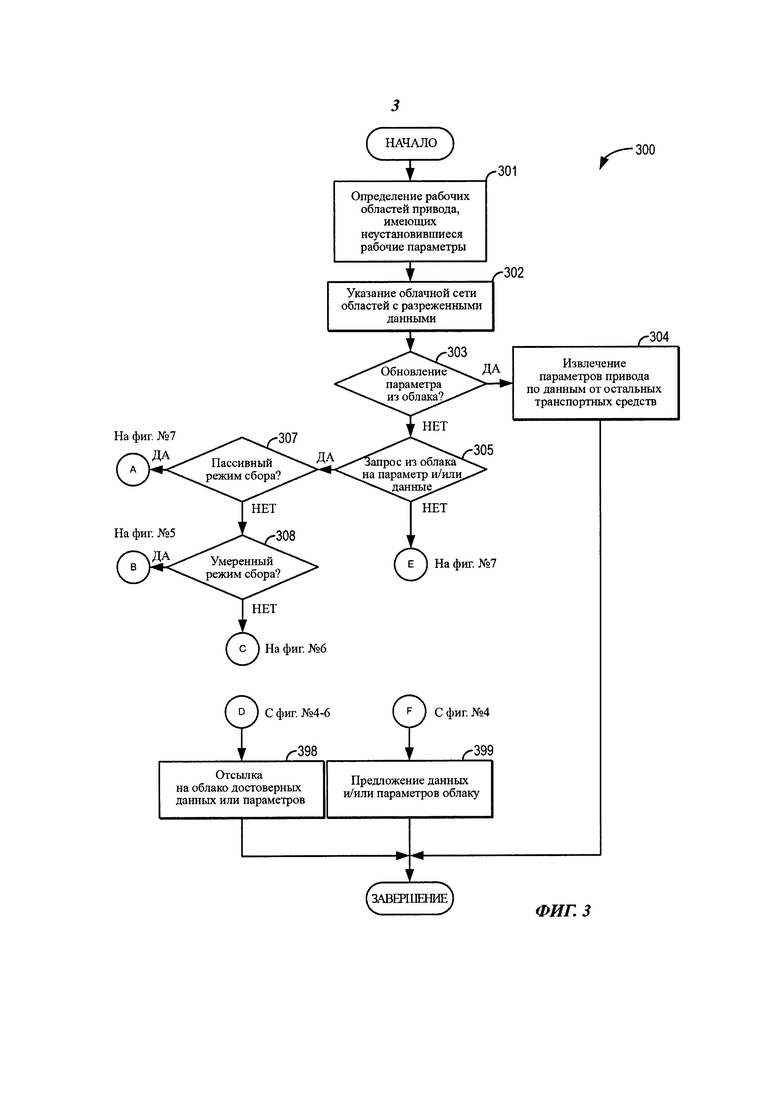
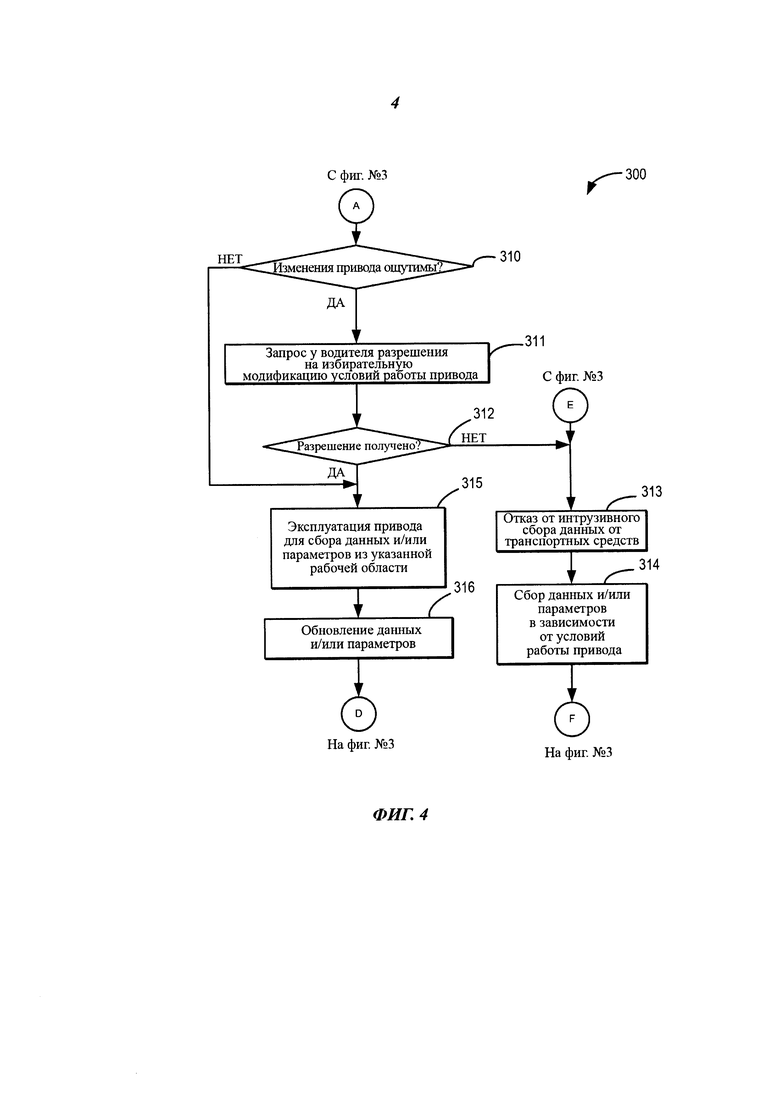
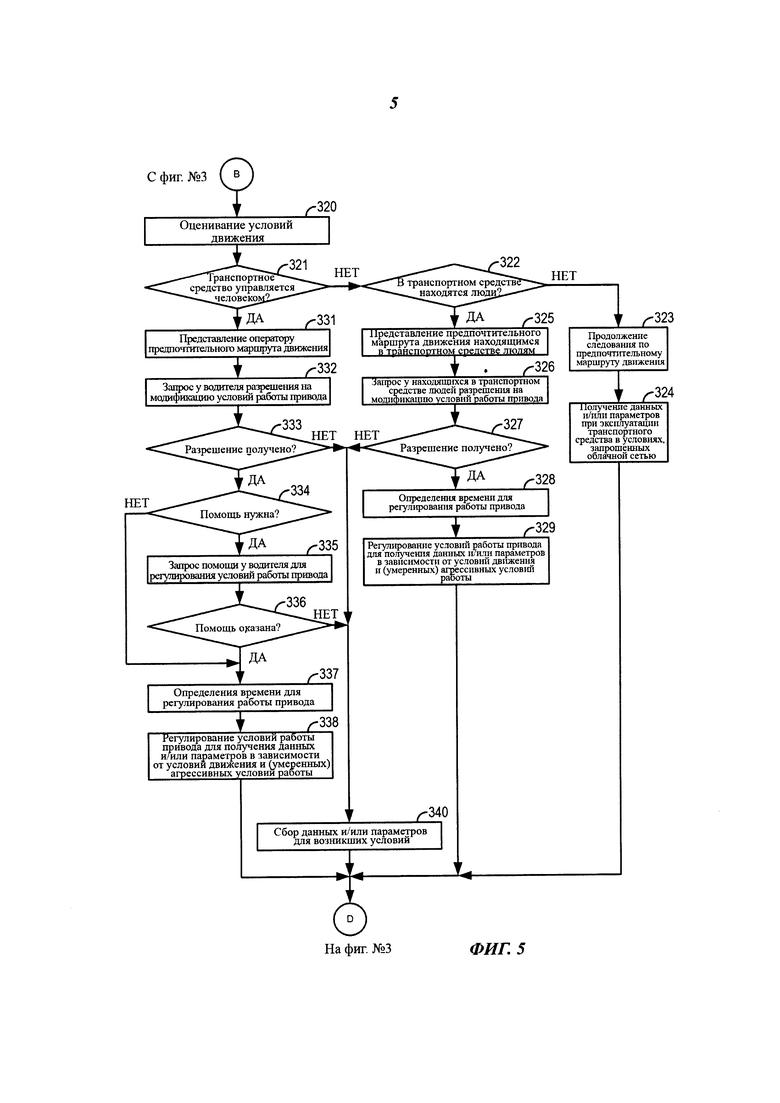
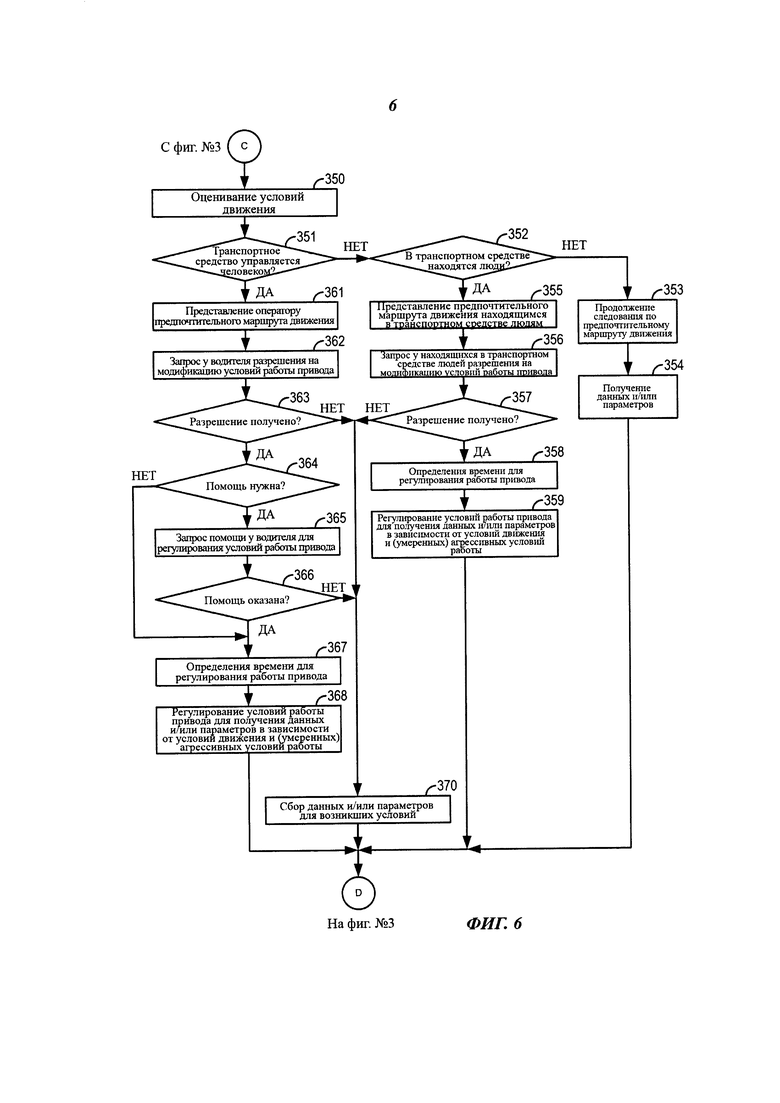
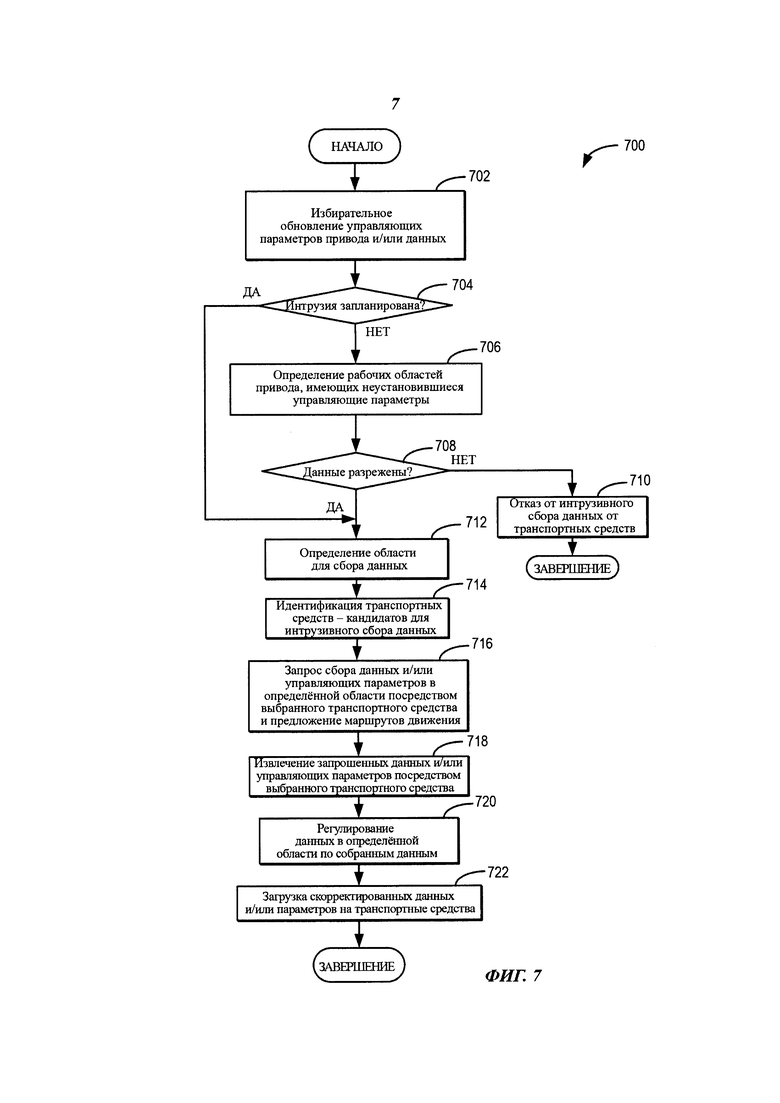
Способ эксплуатации привода по одному из вариантов изобретения содержит передачу контроллеру транспортного средства рабочих областей привода, для которых в базе данных сети, дистанционной относительно транспортного средства, существуют неустановившиеся параметры привода; регулирование исполнительного устройства посредством контроллера по запросу от указанной сети, причем исполнительное устройство регулируют для эксплуатации привода при указанных рабочих областях, для которых существуют неустановившиеся параметры привода; обеспечение трех режимов сбора данных для регулирования неустановившихся параметров привода, содержащихся в указанной базе данных. Первый режим соответствует случаю, когда изменение рабочих параметров привода меньше первого порога, второй режим соответствует случаю, когда изменение рабочих параметров привода меньше второго порога, превышающего первый порог, третий режим соответствует случаю, когда изменение рабочих параметров привода больше второго порога. Обеспечивается снижение временных затрат на заполнение значениями управляющих параметров привода в контроллере транспортного средства. 3 н. и 15 з.п. ф-лы, 7 ил.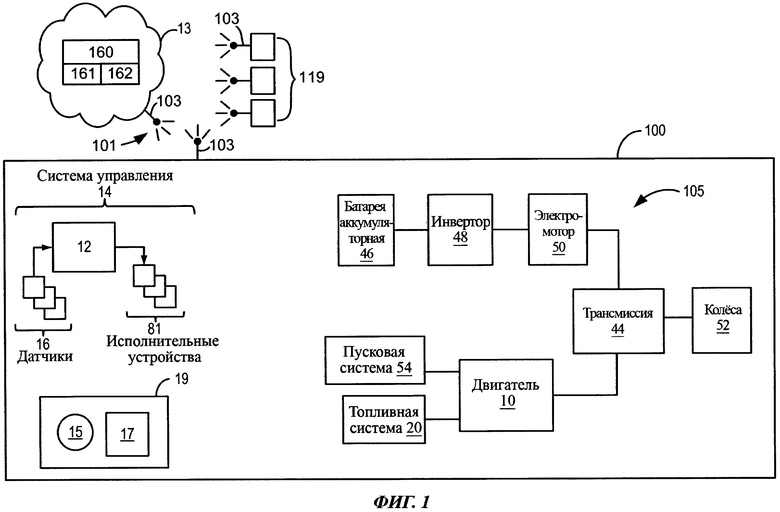
1. Способ эксплуатации привода, содержащий:
передачу контроллеру транспортного средства рабочих областей привода, для которых в базе данных сети, дистанционной относительно транспортного средства, существуют неустановившиеся параметры привода;
регулирование исполнительного устройства посредством контроллера по запросу от указанной сети, причем исполнительное устройство регулируют для эксплуатации привода при указанных рабочих областях, для которых существуют неустановившиеся параметры привода;
обеспечение трех режимов сбора данных для регулирования неустановившихся параметров привода, содержащихся в указанной базе данных,
при этом первый режим соответствует случаю, когда изменение рабочих параметров привода меньше первого порога,
второй режим соответствует случаю, когда изменение рабочих параметров привода меньше второго порога, превышающего первый порог,
третий режим соответствует случаю, когда изменение рабочих параметров привода больше второго порога.
2. Способ по п. 1, также содержащий:
определение одного или более управляющих параметров в указанных рабочих областях привода, для которых существуют неустановившиеся параметры привода;
и обновление параметров базы данных на основе указанных одного или более управляющих параметров, причем указанные неустановившиеся параметры привода представляют собой подразумеваемые управляющие параметры, которые не были отрегулированы с учетом эксплуатации транспортного средства.
3. Способ по п. 2, в котором этап обновления параметров базы данных содержит подгрузку одного или нескольких управляющих параметров в указанную сеть, дистанционную относительно транспортного средства.
4. Способ по п. 3, также содержащий загрузку обновленных параметров в другие транспортные средства.
5. Способ по п. 4, также содержащий эксплуатацию остальных транспортных средств на основе обновленных параметров.
6. Способ по п. 1, в котором рабочие области привода основаны на частоте вращения и крутящем моменте двигателя,
при этом способ также содержит:
запрос разрешения от водителя на эксплуатацию привода в первом режиме сбора данных, если изменения в первом режиме сбора данных становятся ощутимыми, причем указанные изменения в первом режиме сбора данных становятся ощутимыми, если управляющий параметр изменился более чем на пороговую величину относительно существующих условий,
и не запрашивание разрешения от водителя на эксплуатацию привода в первом режиме сбора данных, если изменения в первом режиме сбора данных не становятся ощутимыми, причем указанные изменения в первом режиме сбора данных не являются ощутимыми, если управляющий параметр изменился менее чем на пороговую величину.
7. Способ по п. 6, в котором рабочие области привода включают в себя заданную передачу трансмиссии,
при этом способ также содержит: определение того, находится ли в транспортном средстве человек, после чего транспортное средство предоставляет предпочтительный маршрут движения при втором и третьем режимах сбора данных, причем предпочтительный маршрут движения определяют посредством указанной сети, дистанционной относительно транспортного средства.
8. Способ эксплуатации привода, содержащий:
передачу контроллеру транспортного средства рабочих областей привода, для которых в базе данных сети, дистанционной относительно транспортного средства, существуют неустановившиеся параметры привода;
регулирование исполнительного устройства посредством контроллера по запросу от указанной сети, причем исполнительное устройство регулируют для эксплуатации привода при указанных рабочих областях, для которых существуют неустановившиеся параметры привода;
и вход в один из трех режимов сбора данных, включающих в себя пассивный режим, умеренный режим и агрессивный режим, при этом посредством контроллера обновляют неустановившиеся параметры привода.
9. Способ по п. 8, в котором существуют только три режима сбора данных,
причем пассивный режим включает в себя регулирование рабочих условий привода без разрешения водителя,
при этом способ также содержит: определение того, эксплуатируется ли транспортное средство человеком, после чего транспортное средство предоставляет предпочтительный маршрут движения при втором и третьем режимах сбора данных, причем предпочтительный маршрут движения определяют посредством указанной сети, дистанционной относительно транспортного средства.
10. Способ по п. 9, в котором величина регулировок рабочих условий привода в пассивном режиме меньше, чем в умеренном режиме.
11. Способ по п. 8, в котором первый режим соответствует случаю, когда изменение рабочих параметров привода меньше первого порога,
второй режим соответствует случаю, когда изменение рабочих параметров привода меньше второго порога, превышающего первый порог,
третий режим соответствует случаю, когда изменение рабочих параметров привода больше второго порога.
12. Способ по п. 8, в котором водителя уведомляют о запросе на регулирование рабочих условий привода.
13. Способ по п. 12, в котором водителя запрашивают изменить входные данные транспортного средства.
14. Способ по п. 8, в котором транспортное средство ведут автономно.
15. Способ эксплуатации привода, содержащий:
транслирование в контроллер транспортного средства рабочих областей привода, для которых в базе данных сети, дистанционной относительно транспортного средства, существуют неустановившиеся параметры привода, осуществляемое в соответствии с одним или несколькими неустановившимися параметрами привода, содержащимися в указанной базе данных;
регулирование исполнительного устройства посредством контроллера по запросу от указанной сети, причем исполнительное устройство регулируют для эксплуатации привода при указанных рабочих областях, для которых существуют неустановившиеся параметры привода, при этом указанные рабочие области представляют собой основу для регулирования неустановившихся параметров привода;
вход в режим сбора данных, при этом посредством контроллера обновляют неустановившиеся параметры привода,
и невыполнение регулирования рабочих условий привода в ответ на подачу водителем входных данных в контроллер, если транспортное средство управляется не человеком.
16. Способ по п. 15, в котором двигатель привода эксплуатируют при постоянной частоте вращения при рабочих условиях привода,
при этом способ также содержит: определение того, находится ли в транспортном средстве человек, если транспортное средство управляется не человеком, после чего получают данные и регулируют рабочие условия привода.
17. Способ по п. 15, в котором рабочие условия привода включают в себя положение дроссельной заслонки и передачу трансмиссии,
причем в качестве указанного режима сбора данных используют один из трех режимов сбора данных,
при этом первый режим соответствует случаю, когда изменение рабочих параметров привода меньше первого порога,
второй режим соответствует случаю, когда изменение рабочих параметров привода меньше второго порога, превышающего первый порог,
и третий режим соответствует случаю, когда изменение рабочих параметров привода больше второго порога.
18. Способ по п. 15, также содержащий оценивание дорожных условий и невыполнение регулирования неустановившихся параметров привода в случае, если дорожные условия не соответствуют предустановленным условиям движения.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

