Предлагаемое изобретение относится к испытательной технике и может быть использовано для обработки однократных или редко повторяющихся нестационарных сигналов, предварительно зарегистрированных на магнитную ленту и сопровождаемых широкополосным стационарным процессом (в частности, вибрационным).
Аналогом предлагаемого изобретения является канал оптимальной обработки сигнала, в котором выполняются операции оптимальной фильтрации и логической обработки сигнала [1]. При помощи оптимальной фильтрации обеспечивается наилучшее выделение сигнала из помех и формируется на выходе сигнальный рельеф, характеризующий распределение апостериорной вероятности. Далее производится логическая обработка сигнального рельефа, выполняемая решающим устройством. При этом в соответствии с выбранным критерием выносится решение о наличии сигнала и производится оценка параметров сигнала. Если в качестве помехи в смеси с полезным сигналом действует белый шум, передаточная характеристика оптимального фильтра равна комплексно-сопряженному спектру сигнала [2]. По форме импульсная передаточная характеристика оптимального фильтра представляет собой зеркальное отображение временной функции выделяемого сигнала. Фильтр с такой импульсной передаточной характеристикой называется согласованным.
Оптимальная фильтрация эффективна для сигналов известной формы. Напротив, осуществление оптимальной фильтрации сигналов произвольной формы представляет большие трудности [3].
Аналогом-прототипом предлагаемого изобретения является способ корреляционного приема, принципиальная основа которого рассмотрена в литературе по статистической радиотехнике [2, 4].
Сущность операций, выполняемых при этом со смесью полезного сигнала и шума, состоит в следующем.
Входное напряжение, содержащее смесь полезного сигнала и шума, перемножается с опорным сигналом, являющимся копией полезного сигнала. Данная операция выполняется схемой умножения, сигнал с выхода которой передается на вход интегратора, где производится интегрирование произведения указанных сигналов за время существования исследуемого сигнала. С выхода интегратора сигнал поступает в пороговое устройство, где происходит сравнение с пороговым напряжением, величина которого устанавливается по исходным (априорным) данным. Превышение порога отмечается появлением на выходе указанного устройства сигнала в виде кодовой или двоичной посылки. Таким образом, алгоритм обработки рассматривается как последовательность преобразований принятого сигнала, направленных на получение ответа на вопрос: есть ли полезный сигнал на входе приемника или его нет?
В состав устройства, реализующего способ корреляционного приема, кроме указанных средств и генератора опорного сигнала входит также схема синхронизации, предназначенная для запуска устройства в целом в момент прихода сигнала и возврата в исходное состояние после принятия решения.
Прототип эффективно используется для обнаружения, выделения и определения статистических характеристик полезных сигналов, смешанных с широкополосным стационарным шумом, причем форма полезного сигнала должна быть известна. Повышение помехоустойчивости при обработке достигается за счет избыточности сигнала по длительности. При этом в литературе нет материалов, относящихся к применению прототипа для обработки коротких сигналов произвольной формы.
Задача предлагаемого изобретения состоит в разработке способа поиска и обнаружения однократных или редкоповторяющихся процессов ограниченной длительности, сопровождаемых широкополосным стационарным процессом и последующего измерения характеристик указанных процессов (в частности, вибрационных).
Сущность предлагаемого изобретения состоит в том, что поиск и обнаружение нестационарного процесса, преобразованного в знакопеременный электрический сигнал, последовательно производятся следующими операциями:
- поиск (обнаружение) осуществляется с запоминанием мгновенных значений корреляционной функции и спектральной плотности исследуемого сигнала;
- определение (оценка) амплитудного диапазона и полосы частот, принадлежащих нестационарной компоненте (составляющей) исследуемого процесса;
- передача реализации совместного процесса на вход фильтра, полоса прозрачности которого равна полосе частот исследуемого нестационарного сигнала;
- передача реализаций с входа и с выхода указанного фильтра на соответствующие входы компьютерной системы для последующего определения статистических характеристик исследуемого процесса во временной и частотной области.
Использование предлагаемого изобретения обеспечивает надежное обнаружение нестационарного сигнала ограниченной длительности в смеси с широкополосным стационарным процессом, последующую фильтрацию обнаруженного сигнала и аппаратурную обработку исследуемого процесса средствами компьютерной технологии.
Технический результат заявленного способа состоит в выделении нестационарных сигналов, имеющих ограниченную длительность, произвольных по форме и спектру частот, что обеспечивает возможность их обработки современной аппаратурой.
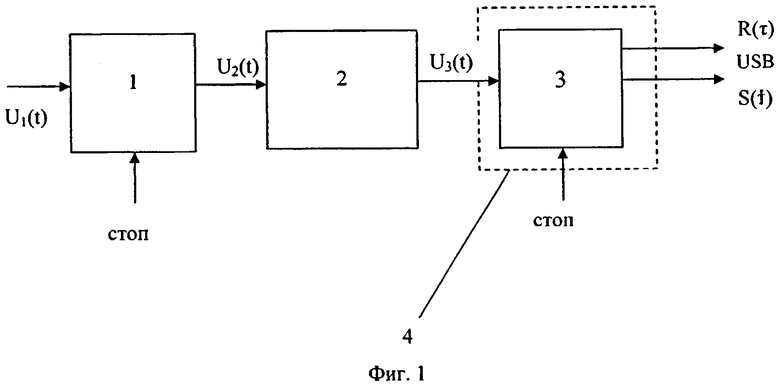
На фиг.1 представлена блок-схема устройства, при помощи которого производится операция поиска полезного сигнала, присутствующего в составе совместного динамического процесса. На фиг.2 представлена блок-схема устройства, при помощи которого осуществляется собственно фильтрация и определение характеристик исследуемого процесса во временной и частотной области.
На фиг.3-10 показаны диаграммы сигналов, поясняющие работу блок-схемы фиг.1 и 2.
Блок-схема фиг.1 содержит в своем составе следующие функциональные средства:
- магнитный регистратор 1;
- прибор 2 визуального контроля;
- приемный блок 3, входящий в состав компьютерного анализатора 4.
Вход магнитного регистратора 1 соединен с входом блок-схемы, а его выход через прибор 2 визуального контроля подключен к входу приемного блока 3 анализатора 4.
Блок-схема фиг.2 содержит в своем составе следующие функциональные средства:
- магнитный регистратор 1;
- фильтр 2;
- приемный блок 3 и триггерный модуль 4, входящий в состав регистратора 5.
Взаимосвязи приемного блока 3 и триггерного модуля 4 устанавливаются программными средствами.
Выходные средства компьютерного анализатора в блок-схемах фиг.1 и 2 представляют собой USB-разъем.
В осуществленном варианте предлагаемого изобретения применены следующие аппаратурные средства:
- в качестве магнитного регистратора 1 - магнитограф НО67;
- в качестве прибора 2 визуального контроля (фиг.1) - вольтметр VM-70 производства VEB Merta Meb - und Frequenztechnik Radebeui (Германия);
- в качестве фильтра 2 (фиг.2) - узкополосный фильтр 01013 производства VEB Robotron-Messelektronik (Германия);
- в качестве анализатора 5 (поз.4 на фиг.1) - компьютерная система Photon (см. web-сайт: www.lds-group.com, редакция 6.0).
Взаимодействие элементов блок-схемы фиг.1 происходит следующим образом.
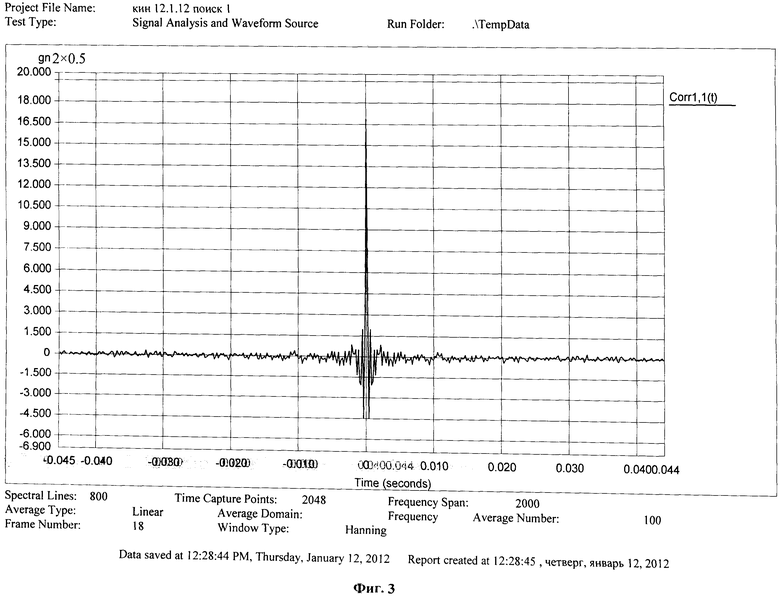
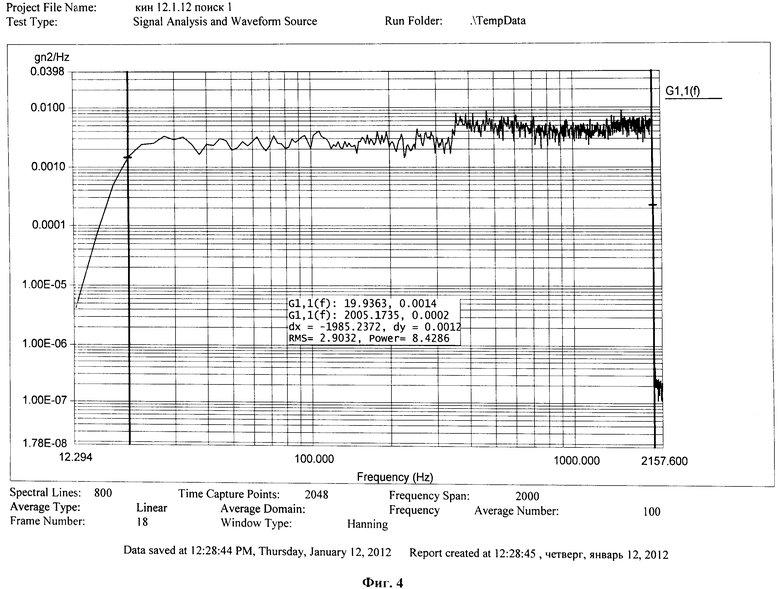
Исследуемый динамический процесс, преобразованный в знакопеременный электрический сигнал U1(t), поступает на вход магнитного регистратора 1, работающего в сквозном режиме записи. При этом на выходе магнитного регистратора воспроизводится сигнал U2(t), равнозначный сигналу U1(t). Сигнал U2(t) через прибор2 визуального контроля передается на вход приемного блока 3 анализатора 4. При этом уровень сигнала U3(t) на выходе прибора 2 по необходимости устанавливается изменением коэффициента передачи из соображений соответствия амплитудному диапазону анализатора 4. Кроме того, прибор 2 служит средством наблюдения за характером исследуемого процесса. Если исследуемый процесс является стационарным, это обязательно фиксируется прибором 2; анализатор 4 при этом регистрирует корреляционную функцию R(τ) и спектральную плотность S(t), обладающие признаками стационарности. В качестве примера диаграммы указанных функций приведены на фиг.3 и 4.
Корреляционная функция широкополосного стационарного процесса представляет собой δ-функцию при τ=0. При этом ее максимальная величина равняется дисперсии процесса, а значение дисперсии, вычисленные по корреляционной и спектральной зависимостям, всегда одинаковые. Если реализация исследуемого динамического процесса (по существу в рассматриваемом случае - сигнал U3(t) на блок-схеме фиг.1) на всей временной протяженности исследуемого процесса характеризуется зависимостями, подобными показанным на фиг.3 и 4. Это указывает на отсутствие полезного сигнала в составе колебания, поступившего на вход.
Определение характеристик стационарного процесса осуществляется в тех случаях, когда априори известно, что исследуемый процесс не обладает признаками нестационарности.
Собственно операция поиска выполняется с изменением режима работы анализатора 4 и прибора визуального контроля 2. В частности, постоянная времени двухполупериодного выпрямителя прибора 2 выбирается минимальной, анализатор 4 с увеличенной скоростью работает в режиме запоминания мгновенных значений R(τ) и S(t). Это обеспечивает минимальную вероятность пропуска полезного сигнала.
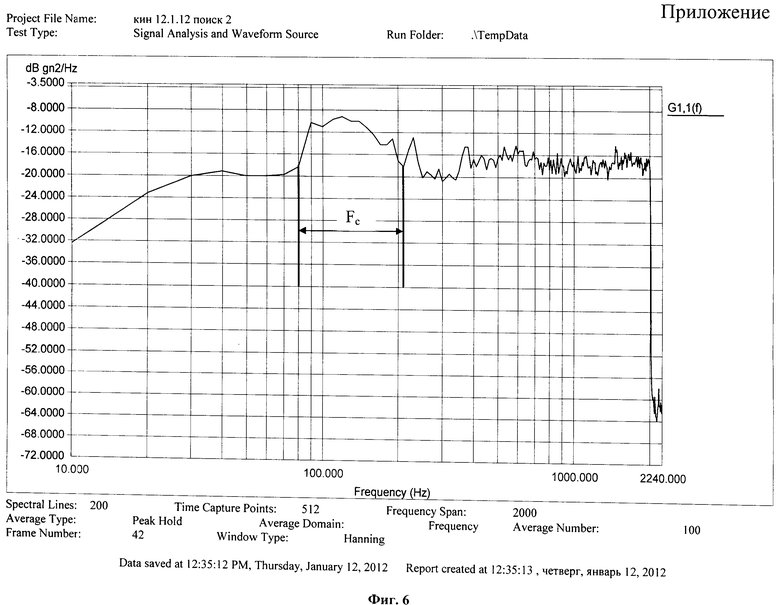
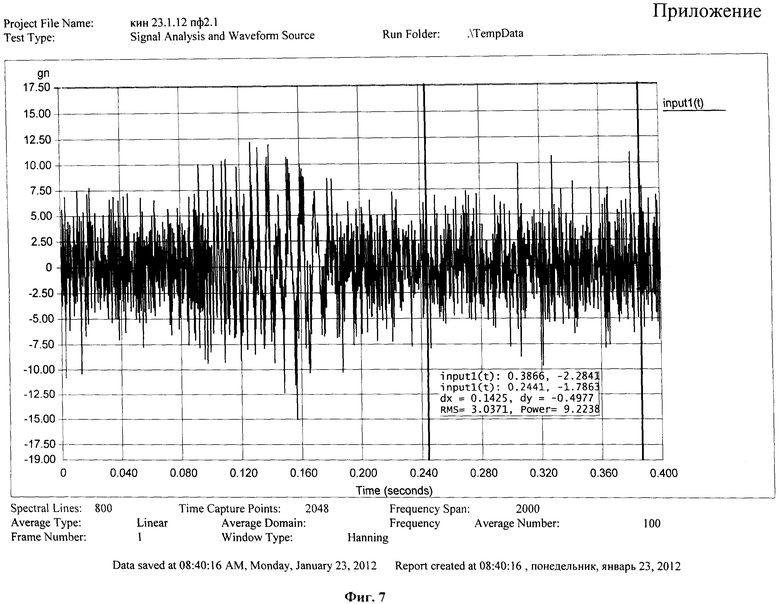
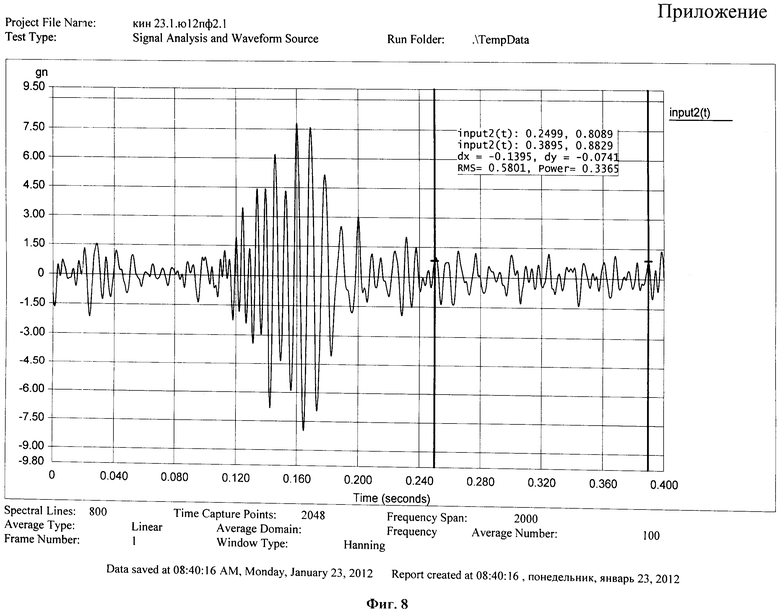
Пример результатов, полученных при осуществлении операции поиска полезного сигнала, показан на диаграммах фиг.7 и 8. Отчетливое видоизменение облика зависимости R(τ) и S(t) сравнительно с характеристиками стационарного процесса, показанными на фиг.3 и 4, указывает на присутствие полезного сигнала в составе исследуемого процесса. По окончании регистрации указанных зависимостей прием сигнала U1(t) и обработка сигнала U3(t) прекращаются программно создаваемой командой «Стоп».
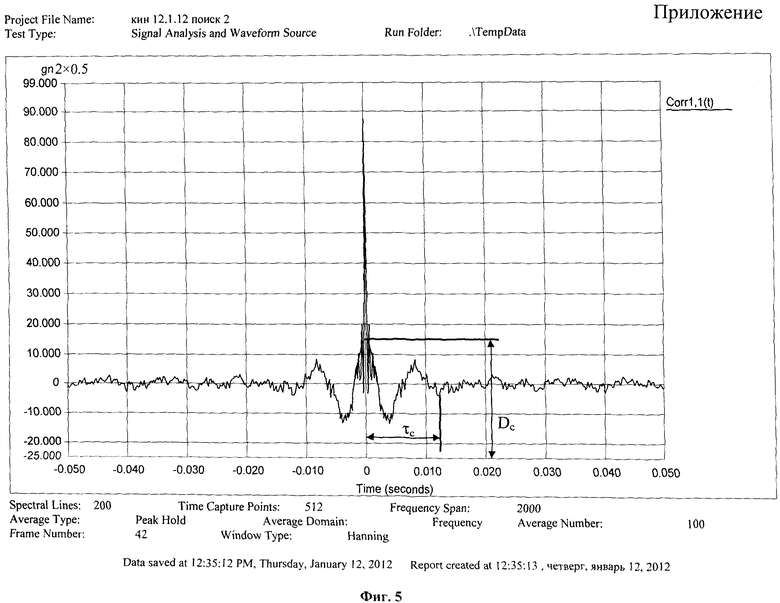
Полученные таким образом результаты позволяют получить оценку следующих параметров полезного сигнала:
- полосы частот Fc;
- интервала τc корреляции;
- дисперсии Dc и среднеквадратичной величины Ос.
По существу при этом производится оценка амплитудно-частотного диапазона полезного сигнала. Указанные параметры отмечены на фиг.5 и 6.
Последующая работа производится согласно блок-схеме фиг.2, взаимодействие элементов которой происходит следующим образом.
Сигнал U1(t) с выхода магнитного регистратора 1, работающего в режиме воспроизведения, поступает на вход фильтра 2, настройка которого выполнена в соответствии с полученными ранее результатами. Сигналы U1(t) и U2(t) с входа и выхода фильтра 2 передаются на соответствующие входы приемного блока 3 анализатора 5. Кроме того, сигнал U2(t) с выхода фильтра 2 поступает также на вход триггерного программного модуля 4, что обеспечивает регистрацию и обработку сигналов в едином временном масштабе. Необходимая настройка триггерного модуля 4 достигается опытным путем с учетом амплитудно-частотного диапазона полезного сигнала, оценка которого получена при работе блок-схемы фиг.1. Взаимодействие приемного блока 3 и триггерного модуля 4 осуществляется программными средствами анализатора 5.
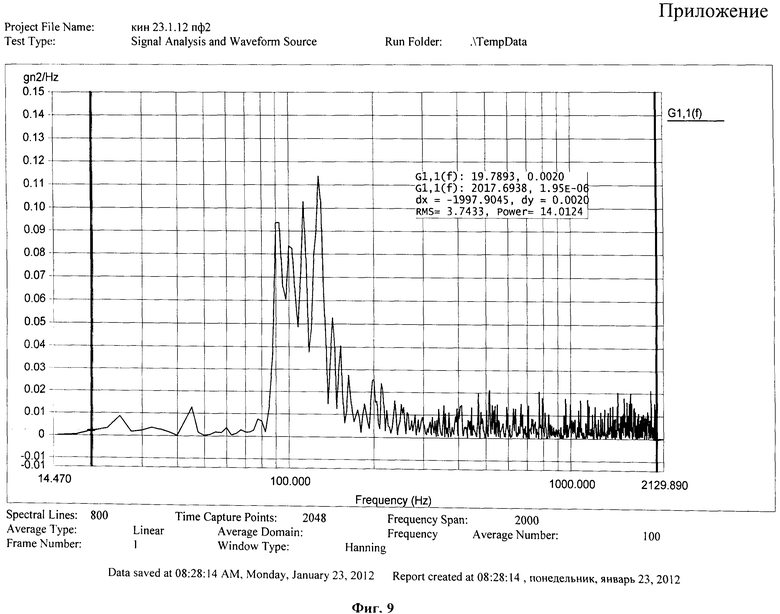
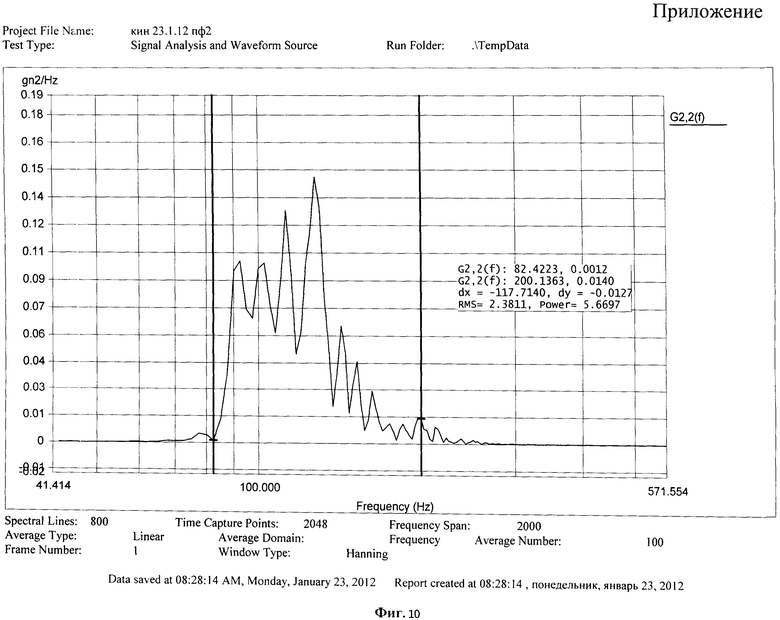
Результаты обработки сигналов, содержащих совместно широкополосный стационарный и нестационарный процессы, показаны на фиг.7-10. При этом на фиг.7 и 8 представлены однократные реализации сигналов U1(t) и U2(t) на входе и выходе схемы фильтрации, на фиг.9 и 10 - соответствующие указанным сигналам спектра в единицах спектральной плотности. Приведенные результаты получены с использованием двух последовательно включаемых фильтров, один из которых действовал как фильтр нижних частот, а второй - как фильтр верхних частот. Частота среза устанавливалась соответственно равной верхней и нижней границе полосы частот Fc полезного сигнала, установленной при выполнении операции поиска.
Литература
1. В.К. Слока, «Вопросы обработки радиолокационных сигналов», изд. «Советское радио», М., 1970, стр.19.
2. Б.Р. Левин, «Теоретические основы статической радиотехники», изд. «Советское радио», М., 1975, стр.262-263.
3. И.А. Липкин, «Основы статистической радиотехники, теории информации и кодирования», изд. «Советское радио», М., 1978, стр.133, 137.
4. «Справочник по радиоэлектронике», под ред. А.А. Куликовского, изд. «Энергия», М., 1967, стр.122-123, 130-132.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБРАБОТКИ СИГНАЛОВ | 2011 |
|
RU2498258C2 |
| СПОСОБ ВЫДЕЛЕНИЯ НЕСТАЦИОНАРНОГО СИГНАЛА | 2009 |
|
RU2428670C1 |
| Способ фильтрации нестационарных сигналов | 2017 |
|
RU2653584C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПОЛЕЗНОГО СИГНАЛА РЕАЛИЗУЕМОГО ПРОЦЕССА | 2008 |
|
RU2394216C1 |
| СПОСОБ ВОСПРОИЗВЕДЕНИЯ НЕСТАЦИОНАРНЫХ СЛУЧАЙНЫХ ПРОЦЕССОВ | 2010 |
|
RU2451272C1 |
| Система регистрации непреднамеренных электромагнитных излучений в ближнем поле электронных устройств | 2024 |
|
RU2829018C1 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КОНСТРУКЦИЙ И СИСТЕМ НА МЕХАНИЧЕСКИЕ И ЭЛЕКТРОННЫЕ ВОЗДЕЙСТВИЯ | 2014 |
|
RU2569636C2 |
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| Способ регистрации и анализа сигналов акустической эмиссии в системе диагностического мониторинга производственных объектов | 2019 |
|
RU2709414C1 |
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
Изобретение относится к испытательной технике и может быть использовано для обработки предварительно зарегистрированных однократных или редко повторяющихся нестационарных сигналов, сопровождаемых широкополосным стационарным процессом, например вибрационным. Достигаемый технический результат - выделение нестационарных сигналов, имеющих ограниченную длительность, произвольных по форме и спектру частот. Способ фильтрации нестационарных сигналов выполняется посредством корреляционного приема предварительно записанных на носитель информации с последующим выделением полезного сигнала, а поиск полезного сигнала осуществляется одновременно с запоминанием мгновенных значений корреляционной функции и спектральной плотности сигнала, их сравнением и выявлением отличий соответствующих характеристик от признаков стационарности, при этом производят оценку амплитудно-частотного диапазона полезного сигнала. 2 з.п. ф-лы, 10 ил.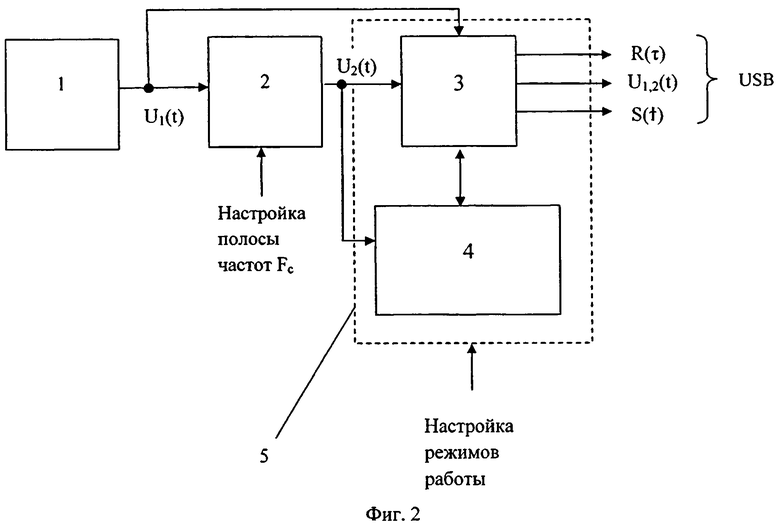
1. Способ фильтрации нестационарных сигналов, выполняемых посредством корреляционного приема предварительно записанных на носитель информации с последующим выделением полезного сигнала, отличающийся тем, что поиск полезного сигнала осуществляется одновременно с запоминанием мгновенных значений корреляционной функции и спектральной плотности сигнала, их сравнением и выявлением отличий соответствующих характеристик от признаков стационарности, при этом производят оценку амплитудно-частотного диапазона полезного сигнала.
2. Способ фильтрации сигналов по п.1, отличающийся тем, что реализации исследуемого процесса передают на вход фильтра, полоса прозрачности которого равна полосе частот полезного сигнала, причем входной и выходной сигналы фильтра передают на компьютерную систему для определения статистических характеристик исследуемого процесса.
3. Способ фильтрации по п.2, отличающийся тем, что настройку компьютерной системы производят соответственно амплитудному диапазону полезного сигнала.
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |

