Группа изобретений относится к медицинской и биологической технике и может быть многофункционально использована в физиотерапии и, в частности, в экспериментальной и клинической онкологии.
Известны сведения о результатах непосредственного воздействия низкочастотных магнитных полей различной интенсивности на злокачественные опухоли. Установлено, что высокая интенсивность поля более 1 Тл частотой 1 и 16 Гц, генерируемого индуктором, охлаждаемым льдом, вызывало деструктивные изменения как в опухолевых клетках саркомы Ml, так и в здоровых тканях (Каплан М.А. Перспективы применения высокоинтенсивных импульсных магнитных полей в лечении злокачественных новообразований / М.А. Каплан, Р.Г. Никитина, М.Е. Климанов, Н.Д. Яковлева, В.В. Дрожжина // Российский онкологический журнал. - 1998. - №5. - С. 34-37).
Инфильтрация и размягчение тканей злокачественных опухолей обнаружены в одной из ранних работ, использующих синусоидальное прерывистое воздействие по (2÷3) секунды при индукции 40 мТл (А.с. 522688 СССР, МПК А61N 1/42. Способ лечения злокачественных опухолей / А.К. Панков, М.А. Уколова, Е.Б. Квакина, Л.Х. Гаркави, Е.И. Бражникова, Р.Н. Салатов, Г.Р. Соловьева, В. А. Еремин, Ростовский научно-исследовательский онкологический ин-т и Всесоюзный научно-исследовательский ин-т медицинского приборостроения. - Опубл. 05.03.77, Бюл. №9.).
Зафиксировано некротическое уменьшение опухолей рака молочных желез подопытных мышей при воздействии полусинусоидальным полем частотой 1 Гц с амплитудой индукции 94 мТл (Tatarov I., Effect of Magnetic Fields on Tumor Growth and Viability / I. Tatarov, A. Panda, D. Petkov, K. Kolappasvamy, K. Thompson, A. Kavirayani, M.M. Lipsky, E. Elson, C.C. Davis, S.S. Martin, L.J. DeTolla // Comp. Med. - August 2011. - 61(4) - p. 339-345).
Ранее авторами была выявлена, возможно, оптимальная интенсивность воздействия (100÷200) мТл и способ преимущественного подавления спонтанных злокачественных опухолей - карциномы молочных желез представительной выборки беспородных собак импульсным магнитным полем (Патент 2376043 РФ, МПК А61N 2/04. Способ подавления функций и разрушения клеток злокачественных опухолей / И.М. Донник, А.П. Волобуев, Е.Д. Усков. - Опубл. 20.12.2009, Бюл. №35). Использованное устройство позволяло генерировать поле требуемой интенсивности частотой не более 1 Гц, при этом регулировка формы и структуры импульсов не предусматривалась.
Известно магнитотерапевтическое устройство (Патент RU №2051706 на изобретение, приор, от 21.10. 1991, опубл. 10.01.1996, МПК 6 A61N 2/04), позволяющее воздействовать на онкопатологии пациентов, помещаемых в рабочую зону между двумя соосными индукторами.
Устройство-прототип содержит генератор импульсов, где коммутирующий блок выполнен в виде управляемого трехфазного выпрямителя с амплитудным регулятором биполярного тока (на основе двухполупериодного выпрямительного моста) и генератором напряжений, управляющих изменением амплитуды импульсов. В амплитудный регулятор введены оптотиристор и одновибратор, который подключен параллельно полевым транзисторам и управляется от генератора импульсов. В устройстве генерируются нерегулируемые по форме и структуре двухступенчатые импульсы напряжения. Величина последующей ступени каждого импульса в (1,5÷4,0) раза выше предыдущей. Путем изменения амплитуд импульсов формируется магнитное поле в виде синусоиды, трапеции или в пилообразном виде с частотой до 1 Гц и амплитудой (50÷80) мТл.
Значащими недостатками устройства являются:
- нерегулируемая форма и структура импульсов, обусловленная тем, что в системе не предусмотрен учет инерционности генератора магнитного поля, обусловленный его индуктивностью, контроль тока в индукторах отсутствует;
- в системе не предусмотрена регулировка скорости нарастания и спада фронтов импульсов, что существенно ограничивает частотный диапазон;
- охлаждение индукторов осуществляется путем естественной конвекции, что ограничивает ток в индукторах и значение индукции магнитного поля;
- низкое значение индукции магнитного поля и малая скорость его изменения на фронтах импульсов снижает интенсивность воздействия;
- не представлен способ формирования рабочей зоны - расстояния между индукторами и не предусмотрена возможность избирательного экранирования магнитного поля;
- не проработан вопрос оптимизации конструкции устройства и, в частности индукторов, что ограничивает эффективность его использования.
Для обеспечения температурного режима требуется система теплоотвода.
Известно устройство (Патент RU №2211713 на изобретение, приор, от 17.07.2001, опубл. 20.04.2003, A61N 2/00) для индукционной гипертермии злокачественных опухолей мелких животных, помещаемых в капсулу, выполненную в виде термостатируемого цилиндра, находящегося в полости, ограниченной снаружи обмоткой индуктора. Через зазор в двойной стенке капсулы прокачивается теплоноситель, отводимый в термостат. Снаружи индуктор охлаждается вентилятором. Недостатком данного устройства является его конструктивное исполнение, при котором объект воздействия помещается в капсулу из полупрозрачного нетокопроводящего материала ограниченных неизменных размеров, предназначенную для малогабаритных биообъектов. Стенки капсулы не находятся в тепловом контакте с внутренней поверхностью индуктора. Указанная система охлаждения индуктора не обеспечивает интенсивный теплоотвод от индуктора и ограничивает продолжительность процедуры воздействия.
Формирование рабочей зоны предполагает разработку механического привода. Известно устройство допускающее формирование рабочей зоны магнитотерапевтического воздействия (Патент RU №2188677 на изобретение, приор, от 25.04.2000, опубл. 10.09.2002, A61N 2/00). Устройство включает нижний неподвижный планшет-ложемент и верхний подвижный планшет, шарнирно соединенный с нижним. В планшеты вмонтированы индукторы магнитного поля. Верхний подвижный планшет приводится в движение штоком от приводного механизма и благодаря шарниру поворачивается относительно нижнего планшета до вертикального положения, открывая рабочую камеру. Пациент укладывается на нижний планшет. Верхний планшет поворотом возвращается в горизонтальное положение и закрывает камеру. Размеры камеры, как следует из описания изобретения, зависят исключительно от формы верхнего планшета. При незначительной его выпуклости объем рабочей камеры оказывается мал. Это ограничивает возможность размещения в ней крупногабаритных объектов. Для достижения равно максимального терапевтического эффекта у пациентов с различными антропометрическими данными необходим демонтаж и соответствующая замена верхнего планшета. Это серьезно усложняет работу персонала и увеличивает время обслуживания и подготовки к работе такой установки.
При разработке стационарного устройства для локального воздействия на биообъекты регулируемым импульсным низкочастотным магнитным полем решается техническая проблема создания комплексного устройства. В настоящее время отсутствуют многофункциональные устройства, которые были бы лишены указанных выше значимых недостатков, существенно снижающих эффективность их использования.
Заявляемое стационарное устройство направлено на обеспечение оптимального терапевтического эффекта импульсным низкочастотным магнитным полем для многофункционального использования в физиотерапии и, в частности, в экспериментальной и клинической онкологии. Указанная проблема решается регулированием в широком диапазоне параметров магнитного поля в допустимом для систем стационарного устройства и объекта воздействия тепловом режиме с возможностью формирования при этом необходимой зоны воздействия между индукторами. Таким образом, технический результат, достигаемый при осуществлении стационарного устройства, заключается в реализации им своего назначения как комплексного многофункционального устройства.
Заявляемое стационарное устройство для локального воздействия на биообъекты регулируемым импульсным низкочастотным магнитным полем содержит систему механического привода для формирования рабочей зоны воздействия, включающую неподвижное основание и расположенную над ним траверсу, выполненную с возможностью регулируемого вертикального перемещения, на неподвижном основании и траверсе соосно друг другу расположены индукторы магнитного поля с обмоткой в виде соленоида, причем каждый из них имеет подключенные к секции теплоотвода теплосъемники, также устройство содержит систему управления и формирования импульсов напряжения для генерации индукторами регулируемых импульсов магнитного поля, соединенную с системой соленоидов индукторов.
Система управления и формирования импульсов стационарного устройства содержит диодный трехфазный выпрямитель по типу Миткевича, либо по типу Ларионова, фильтр, к которому подключена мостовая схема на силовых ключевых транзисторах, подсоединяемых к соленоидам индукторов, измеритель тока (на шунте или датчике Холла) с усилителем, микроконтроллерный блок управления с аналого-цифровым преобразователем (АЦП), связанный с мостовой схемой через блок широтно-импульсной модуляции (ШИМ) и радиатор охлаждения (со встроенным вентилятором и датчиком контроля температуры), на котором размещены мостовая схема и выпрямитель. В мостовой схеме используются силовые ключевые транзисторы с максимальной рабочей частотой до 100 кГц.
Измеритель тока на шунте или датчике Холла позволяет производить непосредственный контроль амплитуды импульсов тока и, соответственно, магнитного поля, генерируемого соленоидами системы индукторов. Измеритель тока отслеживает его отклонение при изменении сопротивления обмоток из-за нагрева (охлаждения) за счет изменения коэффициента заполнения ШИМ. Какой-либо системы обратной связи в устройстве-прототипе не предусмотрено.
В отличие от прототипа, имеющего аналоговую систему управления, представленное устройство оборудовано микроконтроллером с блоком ШИМ и АЦП, что позволяет программировать произвольную форму импульса и устанавливать контролируемые параметры работы системы индукторов в зависимости от поставленных задач.
Кроме того, в отличие от прототипа предусмотрена система охлаждения, что позволяет работать с индукторами значительно большей мощности.
Силовые ключевые транзисторы в мостовой схеме способны работать с сетевым напряжением при токе до 120 А и максимальной рабочей частотой до 100 кГц. Это позволяет без использования понижающего трансформатора осуществить ускоренное нарастание (спад) фронтов импульсов и удерживать ток заданного уровня в соленоидах системы индукторов, подавая кратковременные импульсы сетевого напряжения с регулировкой коэффициента заполнения ШИМ. В результате могут быть получены импульсы по току практически прямоугольной формы.
В отличие от прототипа использование аналогичного индуктора с заявляемой системой управления и формирования импульсов позволяет увеличить частоту их следования в (5÷7) раз.
Многофункциональность системы управления достигается тем, что она обеспечивает регулируемую форму импульсов, вплоть до практически прямоугольных по току, что позволяет увеличивать эффективность воздействия и расширить диапазон частот. При максимальном токе в 30 А в каждом соленоиде индукторов частота следования импульсов может достигать 15 Гц для однополярного режима и 7,5 Гц для биполярного. При минимальном токе в 5 А - 90 и 45 Гц соответственно. Она позволяет регулировать частоту и скважность сигналов, амплитуду, форму и полярность импульсов. Пульсации по току на плато импульса составляют не более 3,5% от амплитуды тока и происходят с частотой 150 Гц.
Таким образом, система управления и формирования импульсов как отдельная подсистема направлена на обеспечение многофункциональности и регулируемой интенсивности контролируемого в автоматическом режиме воздействия, в том числе при нагрузках повышенной мощности. Указанная проблема решается за счет достижения технического результата - регулирования формы импульсов, вплоть до прямоугольной, их полярности и амплитуд, частоты и скважности при непосредственном контроле тока, его стабилизацию в условиях температурных изменений сопротивления обмоток индукторов.
Индуктор стационарного устройства содержит каркас в виде двух дисков, закрепленных на втулке, обмотку, пропитанную теплопроводящим компаундом, в виде равных по числу витков секций, разделенных незамкнутыми кольцевыми вставками, находящимися в тепловом контакте с дисками. Внешний диаметр обмотки индуктора соответствует ширине зоны воздействия, а максимальная высота обмотки составляет величину, при которой индукция магнитного поля, генерируемого наиболее удаленным от зоны воздействия витком на внешнем радиусе составляет не менее 75% от индукции магнитного поля, генерируемого ближайшим к зоне воздействия витком. Теплосъемники расположены на дисках каркаса и выполнены покрывающими площадь обмотки, причем диски, втулка, кольцевые вставки и теплосъемники изготовлены из немагнитного теплопроводящего материала.
В соответствии с вариантом исполнения обмотка выполнена в виде трех равных по числу витков секций, а ее высота составляет не более 1\4 ее внешнего диаметра. Теплосъемники установлены на торцах дисков каркаса и выполнены в виде полых дисков для прокачки теплоносителя.
Конструкция индуктора как отдельное изобретение группы решает проблему соотношения между тепловыделением и инерционностью - ограничениями по амплитуде магнитного поля и генерируемой частоте, обеспечивающих интенсивное воздействие. Технический результат, достигаемый при реализации предлагаемой конструкции индукторов, заключается в достижении высоких, по сравнению с прототипом, значений магнитного поля в сочетании с умеренным энергопотреблением, а также эффективным теплоотводом для стабильной работы устройства.
Заявляемая конструкция индуктора характеризуется оптимальным соотношением диаметра его обмотки к высоте и позволяет сконцентрировать магнитное поле в рабочей зоне до 150 мТл в задаваемом частотном диапазоне при энергопотреблении каждого индуктора не более 800 Вт и улучшенном теплоотводе на его торцы при отсутствии перегрева рабочей зоны.
Указанные значения магнитного поля при умеренном энергопотреблении достигаются, в частности, за счет расположения витков обмотки индукторов (источника магнитного поля) вблизи рабочей зоны, что выражается в уменьшении ее высоты. Такой принцип ее выполнения позволяет избежать неэффективной генерации поля на максимально удаленных от объекта воздействия витках. Для каждого расположенного на внешнем радиусе витка, при расстоянии от него не более 1/4 диаметра обмотки индуктора, уменьшение индукции поля не превышает 25%.
Использование теплопроводящего компаунда и кольцевых вставок в совокупности с уменьшенной высотой индуктора позволяют избежать его внутреннего перегрева, усилить теплоотвод на теплосъемники и обеспечить его сохранность при продолжительной работе. Теплосъемники в свою очередь экранируют рабочую зону от нагрева, вызываемого работающим индуктором.
Без применения системы теплоотвода тепло, выделяемое при прохождении тока в обмотке индукторов, при мощностях, обеспечивающих генерирование интенсивного магнитного поля, может приводить к их недопустимому разогреву. Секции теплоотвода стационарного устройства решают проблему обеспечения допустимого теплового воздействия на биообъекты при заданном температурном поле в индукторах. Результатом их работы является обеспечение допустимой с точки зрения используемых материалов температуры самих индукторов при продолжительной работе и обеспечение температуры, не превышающей допустимую для биологических объектов в зоне контакта индукторов с рабочей зоной, без использования теплоизоляторов.
Каждая секция теплоотвода от индуктора заявляемого стационарного устройства содержит соединенные трубопроводом в замкнутый контур циркуляционный насос, радиатор со встроенным вентилятором, клапаны ввода и вывода теплоносителя, удаления воздуха из системы, а также счетчик регистрации скорости прокачки теплоносителя и указатель давления и температуры. Причем вентилятор, встроенный в радиатор воздушного охлаждения, выполнен с возможностью регулировки скорости вращения, а в циркуляционном насосе предусмотрена регулировка скорости прокачки теплоносителя.
Избыточное тепло от теплосъемников индуктора отводится теплоносителем, прокачка которого обеспечивается циркуляционным насосом. Поступающий в радиатор теплоноситель охлаждается, благодаря потоку воздуха, создаваемому встроенным вентилятором.
Секция теплоотвода отличается, в том числе, регулировкой контролируемой скорости прокачки теплоносителя посредством фиксации режима работы циркуляционного насоса и скорости вращения вентилятора, что определяет температурное поле индуктора и тепловой режим объекта воздействия.
Для формирования зоны воздействия магнитным полем в соответствии с размерами облучаемого объекта заявляемое стационарное устройство содержит систему механического привода. Как одно из изобретений группы система привода направлена на достижение технического результата, который заключается в возможности выполнять регулируемое вертикальное перемещение верхнего индуктора, расположенного на траверсе, в том числе при точной установке размеров рабочей зоны по контактной линейке с шагом в 5 см.
Указанный результат достигается тем, что подвижная траверса надета на установленные на основании полые стойки с вертикальными диаметрально расположенными прорезями, под неподвижным основанием установлен приводной электродвигатель, соединенный через промежуточные валы с винтовыми домкратами и вертикальными винтовыми валами, расположенными в стойках, через прорези которых траверса подсоединена к винтовым валам с помощью надетых на них винтовых бронзовых цилиндрических ступенчатых втулок, прикрепленных к траверсе.
Приводной электродвигатель, подсоединяемый к реверсивному блоку питания, содержит электромагнитный тормоз для фиксации положения траверсы при его отключении. Для требуемой по высоте установки траверсы на ней закреплена контактная линейка в виде стержня с возможностью фиксации в различающихся положениях относительно концевых выключателей.
Регулируемое положение траверсы позволяет устанавливать размер рабочей зоны между индукторами в соответствии с антропометрическими характеристиками объекта воздействия. Фиксация различных положений контактной линейки позволяет приводить в действие нижний концевой выключатель при заданных положениях верхнего индуктора, тем самым обеспечивая точную установку размеров рабочей зоны.
Кроме того появляется возможность дополнительного регулирования, настройки и фиксации положения траверсы в ходе самой процедуры одновременно с варьированием параметров магнитного поля. Благодаря этому создаются условия для достижения оптимального эффекта.
Сущность группы изобретений поясняется фигурами, на которых изображено:
- на фиг. 1 - общий вид стационарного устройства для воздействия низкочастотным магнитным полем на медико-биологические объекты,
- на фиг. 2 - блок-схема системы управления и формирования импульсов магнитного поля,
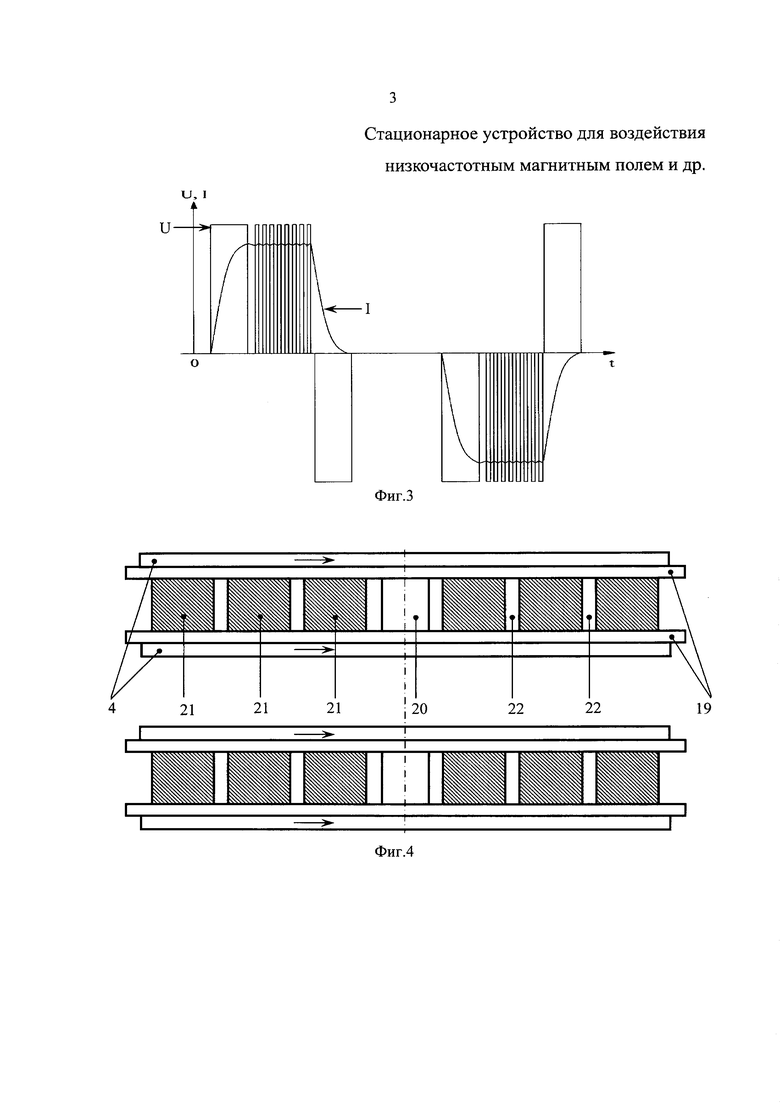
- на фиг. 3 - графики напряжения и тока на индукторе,
- на фиг. 4 - конструкция индукторов,
- на фиг. 5 - блок-схема одной секции системы теплоотвода.
Для подтверждения возможности реализации группой изобретений своего назначения и достижения заявленных результатов рассмотрим вариант исполнения стационарного устройства и его подсистем.
Стационарное устройство (см. фиг. 1) имеет неподвижное основание (1), над которым расположена подвижная траверса (2). На основании (1) и траверсе (2) соосно друг к другу установлены индукторы (3) с теплосъемниками (4). Причем теплосъемники (4) подключены к автономным секциям (5) теплоотвода, обеспечивающим прокачку охлаждаемого теплоносителя, поддерживая допустимый для объекта воздействия и самих индукторов (3) тепловой режим. Объект воздействия располагается на горизонтальной подвижной подставке между индукторами (3).
Задавать и регулировать необходимую для целей воздействия структуру импульсов позволяет система (6) управления и формирования импульсов напряжения для генерации индукторами регулируемых импульсов магнитного поля, которая содержит (см. фиг.2) простой (по типу Миткевича) или по типу Ларионова диодный трехфазный выпрямитель (7) с фильтром (8), к которому подключена мостовая схема (9) на силовых ключевых транзисторах, измеритель тока (10) с усилителем (11), микроконтроллерный блок управления (МК) (12) с аналого-цифровым преобразователем (АЦП) (13), связанный с мостовой схемой (9) через блок широтно-импульсной модуляции (ШИМ) (14) и радиатор (15). При этом используется измеритель тока (10) на шунте или датчике Холла, позволяющий проводить непосредственный контроль тока в обмотке индукторов.
Управление мостовой схемой (9) осуществляется от блока ШИМ (14), связь МК (12) с компьютером (16) - посредством, интерфейса (17) передачи данных. Соленоиды системы индукторов (3) подключаются к мостовой схеме (9).
В целях обеспечения температурного режима мостовая схема (9) и выпрямитель (7) размещены на радиаторах (15), охлаждаемых встроенными вентиляторами. Температура на радиаторах (15) контролируется датчиком (18), за счет использования которого при перегреве выполняется аварийное отключение.
В мостовой схеме (9) используются силовые ключевые транзисторы, с максимальной рабочей частотой до 100 кГц, что позволяет использовать сетевое напряжение для ускоренного нарастания (спада) фронтов импульсов, увеличивая частоту следования импульсов магнитного поля.
Система управления и формирования импульсов работает следующим образом.
Сетевое напряжение выпрямляется, затем сглаживаются пульсации за счет использования фильтра (8), оно составляет порядка 300 В или 600 В - при использовании схемы выпрямителя (7) по типу Ларионова. Заявляемая схема формирования импульсов магнитного поля без изменений поддерживает реализацию обоих вариантов выпрямителей (7), обеспечивающих выходное напряжение не менее 300 В.
Выпрямленное напряжение поступает на мостовую схему (9). Ее назначение заключается в задании величины тока через соленоиды при помощи ШИМ. Величина тока контролируется его измерителем (10). Перед передачей с измерителя (10) на АЦП (13) производится увеличение напряжения в блоке усилителя (11).
В начальный момент времени для формирования прямоугольного импульса быстронарастающего тока с выхода высоковольтного выпрямителя (7) на вход мостовой схемы (9) подается напряжение не менее 300 В (см. фиг. 3). В мостовой схеме (9) возникает ток. Время нарастания импульса не превышает 18 мс, спада - 15 мс. Спустя время, соответствующее длительности фронта импульса тока, подача постоянного напряжения на вход мостовой схемы (9) прекращается. Для поддержания постоянного тока на плато импульса применяется широтно-импульсная модуляция, представляющая собой пачку прямоугольных импульсов напряжения постоянной амплитуды с частотой порядка 22-23 кГц.
При нагреве обмотки индукторов (3) увеличивается их сопротивление, что вызывает отклонение величины тока, контролируемой измерителем (10), от заданной. В этом случае автоматически изменяется коэффициент заполнения ШИМ, чтобы стабилизировать уровень тока в обмотке индуктора (3).
После отключения ШИМ соленоиды индукторов (3), накопив энергию, должны разряжаться и отдавать ее в источник питания (выпрямитель (7)). Для ускорения передачи энергии подается отрицательное напряжение на соленоиды индуктора (3), ускоряя их разряд. Для этого замкнутая диагональ моста размыкается, а другая - замыкается и к мостовой схеме (9) вновь прикладывают разность потенциалов не менее 300 В, тем самым осуществляя переполюсовку соленоидов. Длительность импульса напряжения такова, чтобы ток через них уменьшился до нуля за время, равное нарастанию фронта его импульса.
В ходе работы микроконтроллерный блок (12) управляет мостовой схемой (9). Выделяемое мостовой схемой (9) и выпрямителем (7) тепло снимается через охлаждаемые радиаторы (15), обеспечивая устойчивость их работы. Температура радиаторов (15) контролируется датчиком (18) сигнал с которого поступает на АЦП (13).
Аналогично осуществляется работа системы управления при формировании импульсов, отличных от прямоугольных по току при использовании соответствующего программного обеспечения.
Формируемые импульсы поступают на два соосных параллельно соединенных соленоида индукторов (3) (см. фиг. 4), которые могут быть задействованы как совместно, так и раздельно для генерирования магнитного поля в расположенной между ними рабочей зоне.
Известно, что амплитуда индукции импульсного магнитного поля определяется индуктивностью индукторов и величиной тока в их обмотках. В свою очередь от индуктивности зависит инерционность системы, а от тока тепловыделение.
Каркасы индукторов представляют собой диски (19), закрепленные на центральной втулке (20). Обмотка выполнена в виде равных по числу витков секций (21), разделенных незамкнутыми кольцевыми вставками (22), которые находятся в тепловом контакте с дисками (19) каркаса, осуществляя отвод тепла из центра катушки.
На дисках (19) каркаса размещены теплосъемники (4), которые выполнены в виде полых охлаждающих камер для прокачки через них теплоносителя и отвода тепла при заданном энергопотреблении. Теплосъемники (4) должны покрывать площадь обмотки, при этом они могут быть выполнены в виде дисков соответствующего диаметра. Между теплосъемниками (4) и дисками (19) каркаса обеспечивается плотное прилегание, для чего между ними дополнительно наносится слой термопасты.
Обмотка пропитана теплопроводящим компаундом, который повышает теплопроводность индуктора. Элементы каркаса - диски (19) и втулка (20), а также кольцевые вставки (22) и теплосъемники (4) выполнены из немагнитного теплопроводящего материала - дюраля или латуни и т.д.
Обмотка в соответствии с одним из вариантов исполнения выполнена в виде трех секций (21), что является оптимальным с точки зрения сборки конструкции с одной стороны и обеспечением теплоотвода с другой.
Размер индуктора (3) определяется исходя из задач, поставленных назначением устройства. При этом внешний диаметр обмотки индуктора (3) для обеспечения эффективного воздействия должен соответствовать ширине зоны воздействия. Компоновка обмотки выбирается, исходя из заданного внешнего диаметра, и составляет величину, при которой индукция магнитного поля, генерируемого наиболее отдаленным от зоны воздействия витком на внешнем радиусе обмотки, будет составлять не менее 75% от индукции магнитного поля, генерируемого ближайшим к зоне воздействия витком.
При этом обмотка индуктора (3), при ее максимальной плотности, выполняется не более 1\4 от ее внешнего диаметра. Диаметр втулки (20) выполняется минимально возможным, но при этом достаточным для обеспечения устойчивости конструкции.
Таким образом, достигается соотношение индуктивности и сопротивления обмотки позволяющее обеспечить интенсивное магнитное поле в рабочей зоне до 150 мТл в задаваемом частотном диапазоне при энергопотреблении каждого индуктора (3) по 800 Вт. Режим работы индукторов (3) устанавливается системой управления и формирования импульсов.
Система индукторов (3) работает следующим образом.
С системы управления и формирования импульсов на соленоиды индукторов (3) подается импульс напряжения порядка 300 В. В течение времени, определяемого соотношением индуктивности к сопротивлению, происходит нарастание тока и магнитного поля до заданного значения.
Удержание тока на установленном значении производится генерацией серии коротких импульсов напряжения (ШИМ) с регулируемым коэффициентом заполнения. В целях ускорения спада импульса тока до нуля, генерируется такое же напряжение противоположное по знаку.
При работе индуктор (3) нагревается, излишнее тепло отводится от обмотки через кольцевые вставки (22) к дискам (19) каркаса на теплосъемники (4), подсоединенные к соответствующей секции (5) теплоотвода, в которых прокачивается теплоноситель. За счет теплопроводящего компаунда и кольцевых вставок (22) обеспечивается теплопередача из объема индуктора, что позволяет избежать перегрева обмотки.
Теплоотвод от индукторов (3) заявляемого стационарного устройства производится с помощью секций (5), установленных отдельно для каждого из них (см. фиг. 4), что допускает передвижение индукторов (3).
Секция (5) системы теплоотвода представляет собой замкнутый контур, состоящий из соединенных трубопроводом элементов, который герметично подсоединяется к теплосъемникам (4) для прокачки через них охлаждаемого теплоносителя и осуществления тем самым контролируемого охлаждения индуктора (3).
Для прокачки теплоносителя использован циркуляционный насос (23) с возможностью регулирования скорости прокачки. Скорость прокачки теплоносителя регистрируется счетчиком (24), давление и температура теплоносителя фиксируются указателем (25). Для компенсации температурного изменения объема теплоносителя предусмотрен гидроаккумулятор (26).
В качестве теплоносителя может использоваться антифриз или дистиллированная вода. Охлаждение теплоносителя осуществляют с помощью радиатора (27) со встроенным в его корпус вентилятором с регулируемой скоростью вращения, осуществляющим принудительное воздушное охлаждение.
Входной клапан (28) и выходной клапан (29) предназначены для подачи и слива теплоносителя. Клапаны (30) обеспечивают удаление из системы воздуха при ее заполнении.
Секция теплоотвода работает следующим образом.
Заполнение секции теплоносителем осуществляется через входной клапан (28) с помощью насоса (23) до давления не более 1 избыточной атмосферы. Контроль давления осуществляют с помощью указателя (25). Удаление из системы воздуха производят с помощью клапанов (30) при ее заполнении. Сброс теплоносителя из секции (5) осуществляется самотеком через выходной клапан (29).
Перед началом работы секции (5) теплоотвода устанавливают режимы работы циркуляционного насоса (23) и вентилятора радиатора (27) в зависимости от потребляемой мощности индуктора (3).
Счетчик (24) расхода теплоносителя позволяет определить его скорость. Максимальное значение скорости прокачки составляет 18 л/мин, что обеспечивает температуру теплоносителя до 35°С, при силе тока 30 А в течение воздействия порядка 45 мин.
При нагреве индуктора (3) основной поток тепла идет на теплосъемники (4) индукторов (3), через них производится теплоотдача к теплоносителю. Нагретый теплоноситель по трубкам секции (5) теплоотвода поступает в радиатор (27), где охлаждается набегающим потоком воздуха, создаваемым вентилятором, а затем вновь возвращается в теплосъемники (4).
Расширение теплоносителя вследствие его нагрева компенсируется использованием гидроаккумулятора (26), что позволяет стабилизировать давление в системе.
Контроль температуры и давления теплоносителя в процессе работы секции (5) осуществляется с помощью указателя (25). При недопустимом увеличении температуры скорость прокачки теплоносителя и(или) скорость вращения вентилятора увеличивают до достижения требуемого температурного режима.
Преимуществом секции (5) теплоотвода является обеспечение регулируемого теплового воздействия на различающиеся биообъекты при заданном температурном поле индукторов.
Известно, что интенсивность воздействия зависит от взаимного расположения объекта и индукторов (3). При этом значимым фактором являются антропометрические характеристики объекта. При локальном воздействии оно должно быть сосредоточено на ограниченной площади поверхности объекта.
Указанные проблемы решаются посредством целенаправленного формирования рабочей зоны воздействия путем использования механического привода и экранирующих поле пластин из магнитомягких сплавов задаваемых размеров и формы. Объект воздействия располагается в рабочей зоне между двумя соосными индукторами (3) на горизонтально подвижной подставке.
Система механического привода позволяет перемещать над нижней неподвижной частью в виде основания (1) траверсу (2) на заданную высоту. На основании (1) и траверсе (2) размещены индукторы (3) с дисками (4) теплосъемников, подсоединенных к секциям (5) теплоотвода, то есть элементы, для перемещения которых предназначена механическая система.
Под основанием (1) установлен приводной электродвигатель (31) соединенный через промежуточные валы (32) с винтовыми домкратами (33). Двигатель (31) оборудован электромагнитным тормозом для фиксации положения подвижной траверсы (2) при отключении реверсивного блока питания (34). На основании (1) закреплены полые стойки (35), в которых установлены взаимодействующие с домкратами (33) вертикальные выходные валы (36), выполненные в виде винтов. Полые стойки (35) закреплены на основании (1) и имеют диаметрально расположенные вертикальные прорези, через которые подвижная траверса (2) соединена с валами (36) с помощью надетых на валы (36) бронзовых винтовых втулок (37) цилиндрической ступенчатой формы, прикрепленных к траверсе.
Для ограничения движения траверсы (2) установлены верхний и нижний концевые выключатели (38) привода соответственно, связанные с реверсивным блоком питания (34). Для размыкания нижнего концевого выключателя (38) используют контактную линейку (39) с помощью которой предварительно задают положение верхнего индуктора (3). Линейка (39) представляет собой стержень, выполненный с возможностью фиксации на необходимой высоте на траверсе (2). Для этого линейка (39) выполнена с отверстиями для ее установки с помощью шпильки (40) на планке (41), закрепленной на траверсе (2).
Система формирования рабочей зоны работает следующим образом.
Приводной двигатель (31), через промежуточные валы (32), передает вращение на винтовые домкраты (33), которые преобразуют вращение двигателя (31) во вращение вертикально установленных валов (36) - винтов. Вращение вертикальных винтов валов (36) преобразуется через винтовые втулки (37), прикрепленные к траверсе, в поступательное вертикальное движение траверсы (2) с закрепленным верхним индуктором (3) вдоль стоек (35).
Предварительно может быть задана необходимая высота расположения траверсы (2), которая позволяет сформировать требуемую рабочую зону воздействия. Для этого контактная линейка (39) фиксируется посредством шпильки (40) на планке (41), закрепленной на траверсе (2). Таким образом, с траверсой (2) смещается закрепленная на ней планка (41), относительно которой в различающихся позициях с помощью шпильки (40) может фиксироваться контактная линейка (39). При движении траверсы (2) и соответственно контактной линейки (39) на установленной высоте происходит размыкание нижнего концевого выключателя (38) привода к реверсивному блоку питания (34) электродвигателя (31). Верхнее положение траверсы (2) задают с помощью стержня, установленного на ней.
Кроме того, вручную остановка может осуществляться отключением реверсивного блока питания (34).
Дополнительная настройка рабочей зоны, в том числе и в ходе самой процедуры может осуществляться путем направленных смещений траверсы (2) при реверсивном переключении блока питания (34) обеспечивающего работу электродвигателя (31). Траверса (2) с помощью электромагнитного тормоза при отключении электродвигателя (31) фиксируется в задаваемых положениях, предотвращая ее смещения.
Работа заявляемого стационарного устройства для локального воздействия на биообъекты регулируемым импульсным низкочастотным магнитным полем может быть проиллюстрирована на примере проведения экспериментального облучения злокачественных новообразований мелких животных.
Перед сеансом облучения посредством системы механического привода формируется рабочая зона, то есть необходимое расстояние между индукторами (3) с помощью контактной линейки (39). Управление перемещением производится посредством реверсивного блока питания (34), при достижении подвижной траверсой (2) заданного положения контактная линейка (39) приводит в действие концевой выключатель (38), фиксируя, таким образом, расстояние между индукторами (3).
После формирования рабочей зоны объект воздействия размещается между индукторами (3) на горизонтальной подвижной подставке. Перед началом работы системы управления и формирования импульсов, производится запуск обеих секций (5) теплоотвода. Устанавливаются режимы работы циркуляционных насосов (23) и вентиляторов радиаторов (27) в зависимости от потребляемой мощности индуктора (3).
Следующим этапом производится включение системы управления и формирования импульсов. На компьютере (16) задаются требуемые параметры магнитного поля: форма импульсов, их амплитуда, полярность, скважность, частота следования и продолжительность воздействия, далее направляется управляющая команда на микроконтроллер (12). Микроконтроллер (12), управляя мостовой схемой (9) через блок ШИМ (14), формирует импульсы напряжения заданной длительности и частоты на соленоидах индукторов (3) для получения в них требуемого тока (магнитного поля). Контроль уровня тока производится измерителем тока (10), при отклонении величины тока от заданной, микроконтроллер (12) регулирует коэффициент заполнения ШИМ в большую или меньшую сторону. Выделяемое мостовой схемой (9) и выпрямителем (7) тепло снимается через охлаждаемые радиаторы (15), обеспечивая устойчивость их работы. Температура радиаторов (15) контролируется датчиком (18) сигнал с которого поступает на АЦП (13).
С системы управления и формирования импульсов на соленоиды индукторов (3) подается импульс напряжения порядка 300 В, происходит нарастание тока и магнитного поля до заданного значения. Удержание тока на установленном значении производится генерацией серии коротких импульсов напряжения (ШИМ) с регулируемым коэффициентом заполнения. На этапе спада импульса тока до нуля, генерируется такое же напряжение противоположное по знаку.
При работе индуктор (3) нагревается, излишнее тепло отводится от обмотки через кольцевые вставки (22) к дискам (19) и теплосъемникам (4). Теплоноситель с помощью насоса (23) прокачивается по трубкам соответствующей секции (5) теплоотвода и поступает в радиатор (27), где и охлаждается набегающим потоком воздуха, создаваемым вентилятором. После охлаждения теплоноситель вновь поступает в теплосъемники (4). По завершению заданного времени сеанса воздействия программа системы (6) управления автоматически прекращает работу устройства.
Таким образом, стационарное устройство осуществляет эффективное локальное воздействие на биообъекты импульсным низкочастотным магнитным полем с регулируемыми в широком диапазоне параметрами. Система управления и формирования импульсов позволяет регулировать их форму, скорость нарастания и спада импульсов, амплитуду, полярность, скважность, частоту следования и продолжительность воздействия. Конструкция индукторов и использование автономных секций теплоотвода обеспечивают требуемую интенсивность магнитного поля при задаваемом энергопотреблении в допустимом для устройства и облучаемого объекта температурном режиме. Расстояние между индукторами может быть необходимым образом отрегулировано как предварительно, так и в ходе процедуры с помощью системы механического привода. В целом, заявляемые технические решения, в том числе в составе единого устройства, позволяют решать комплекс актуальных практических и исследовательских задач в магнитотерапии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ФУНКЦИЙ И РАЗРУШЕНИЯ КЛЕТОК ЗЛОКАЧЕСТВЕННЫХ ОПУХОЛЕЙ | 2008 |
|
RU2376043C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВОЗДЕЙСТВИЯ КОМБИНИРОВАННОГО МАГНИТНОГО ПОЛЯ НА КИНЕТИКУ БИОХИМИЧЕСКИХ ПРОЦЕССОВ В БИОЛОГИЧЕСКИХ СИСТЕМАХ, СОДЕРЖАЩИХ МАГНИТНЫЕ НАНОЧАСТИЦЫ | 2016 |
|
RU2673337C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ МОЩНОГО ВЫСОКОЧАСТОТНОГО ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ | 2008 |
|
RU2375722C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ЧЕЛОВЕКА МАГНИТНЫМ ПОЛЕМ | 1995 |
|
RU2104720C1 |
| Устройство для магнитно-импульсной обработки растений | 2016 |
|
RU2652818C1 |
| СПОСОБ НАМОТКИ СОЛЕНОИДА СИЛЬНОГО МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2497218C1 |
| Устройство температурно-вакуумного воздействия | 2021 |
|
RU2756337C1 |
| СВЕРХПРОВОДЯЩИЙ СОЛЕНОИД С ГОФРИРОВАННЫМ МАГНИТНЫМ ПОЛЕМ ДЛЯ УДЕРЖАНИЯ ПЛАЗМЫ | 2013 |
|
RU2557090C2 |
| СИСТЕМА ВОЗБУЖДЕНИЯ ВЕДУЩЕГО МАГНИТНОГО ПОЛЯ ЛИНЕЙНОГО ИНДУКЦИОННОГО УСКОРИТЕЛЯ | 1984 |
|
SU1238715A1 |
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ МАГНИТНЫМ ПОЛЕМ | 2000 |
|
RU2171696C1 |



Группа изобретений относится к медицинской технике и предназначена для многофункционального использования в физиотерапии и онкологии. Стационарное устройство для воздействия импульсным низкочастотным магнитным полем содержит основание и траверсу, на которых расположены индукторы. Каждый индуктор имеет теплосъемники с автономной секцией теплоотвода. Система управления и формирования импульсов заданной формы содержит диодный трехфазный выпрямитель простой, либо по типу Ларионова, фильтр, к которому подключена мостовая схема на силовых ключевых транзисторах с возможностью соединения с соленоидами индукторов, измеритель тока с усилителем, микроконтроллерный блок управления с АЦП, связанный с мостовой схемой через блок ШИМ, а также установлен радиатор охлаждения, на котором размещены мостовая схема и выпрямитель. Индуктор имеет каркас с обмоткой, секции которой равны по числу витков и разделены незамкнутыми кольцевыми вставками. Теплосъемники расположены на дисках каркаса. Зона воздействия задается с помощью системы механического привода. Группа изобретений позволяет регулировать в широком диапазоне параметры магнитного поля и рабочей зоны в допустимом тепловом режиме. 4 н. и 24 з.п. ф-лы, 5 ил.
1. Стационарное устройство для локального воздействия на биообъекты регулируемым импульсным низкочастотным магнитным полем, содержащее систему механического привода для формирования рабочей зоны воздействия, включающую неподвижное основание и расположенную над ним траверсу, выполненную с возможностью регулируемого вертикального перемещения, на неподвижном основании и траверсе соосно друг другу расположены индукторы магнитного поля с обмоткой в виде соленоида, причем каждый индуктор имеет подключенные к секции теплоотвода теплосъемники, устройство также содержит систему управления и формирования импульсов напряжения для генерации индукторами регулируемых импульсов магнитного поля, соединенную с системой соленоидов индукторов.
2. Стационарное устройство по п. 1, отличающееся тем, что система управления и формирования импульсов содержит диодный трехфазный выпрямитель по типу Миткевича либо по типу Ларионова, фильтр, к которому подключена мостовая схема на силовых ключевых транзисторах с возможностью соединения с соленоидами индукторов, измеритель тока с усилителем, микроконтроллерный блок управления с аналого-цифровым преобразователем, связанный с мостовой схемой через блок широтно-импульсной модуляции и радиатор охлаждения, на котором размещены мостовая схема и выпрямитель.
3. Стационарное устройство по п. 2, отличающееся тем, что в мостовой схеме используются силовые ключевые транзисторы с максимальной рабочей частотой до 100 кГц.
4. Стационарное устройство по п. 2, отличающееся тем, что используется измеритель тока на шунте или датчике Холла.
5. Стационарное устройство по п. 2, отличающееся тем, что радиатор системы управления содержит встроенный вентилятор.
6. Стационарное устройство по п. 2 или 5, отличающееся тем, что радиатор системы управления оснащен датчиком контроля температур.
7. Стационарное устройство по п. 1, отличающееся тем, что индуктор содержит каркас в виде двух дисков, закрепленных на втулке, обмотку, пропитанную теплопроводящим компаундом, в виде равных по числу витков секций, разделенных незамкнутыми кольцевыми вставками, находящимися в тепловом контакте с дисками, причем внешний диаметр обмотки индуктора соответствует ширине зоны воздействия, максимальная высота обмотки составляет величину, при которой индукция магнитного поля, генерируемого наиболее удаленным от зоны воздействия витком на внешнем радиусе, составляет не менее 75% от индукции магнитного поля, генерируемого ближайшим к зоне воздействия витком, а теплосъемники расположены на дисках каркаса и выполнены покрывающими площадь обмотки, причем диски, втулка, кольцевые вставки и теплосъемники выполнены из немагнитного теплопроводящего материала.
8. Стационарное устройство по п. 7, отличающееся тем, что высота обмотки составляет не более 1\4 ее внешнего диаметра.
9. Стационарное устройство по п. 7, отличающееся тем, что обмотка выполнена в виде трех равных по числу витков секций.
10. Стационарное устройство по п. 7, отличающееся тем, что теплосъемники установлены на торцах дисков каркаса и выполнены в виде полых дисков для прокачки теплоносителя.
11. Стационарное устройство по п. 1, отличающееся тем, что секция теплоотвода от индуктора содержит соединенные трубопроводом в замкнутый контур циркуляционный насос, радиатор со встроенным вентилятором, клапаны ввода и вывода теплоносителя, удаления воздуха из системы, а также счетчик регистрации скорости прокачки теплоносителя и указатель давления и температуры.
12. Стационарное устройство по п. 11, отличающееся тем, что вентилятор, встроенный в радиатор воздушного охлаждения, выполнен с возможностью регулировки скорости вращения.
13. Стационарное устройство по п. 11, отличающееся тем, что в циркуляционном насосе предусмотрена регулировка скорости прокачки теплоносителя.
14. Стационарное устройство по п. 1, отличающееся системой механического привода для формирования рабочей зоны, где траверса надета на установленные на основании полые стойки с вертикальными диаметрально расположенными прорезями, а под основанием установлен приводной электродвигатель с электромагнитным тормозом, подсоединенный к реверсивному блоку питания, двигатель через промежуточные валы соединен с винтовыми домкратами и вертикальными винтовыми валами, расположенными в стойках, через прорези которых траверса подсоединена к винтовым валам с помощью надетых на них винтовых втулок, прикрепленных к траверсе.
15. Стационарное устройство по п. 14, отличающееся тем, что винтовая втулка, через прорези прикрепленная к траверсе, имеет цилиндрическую ступенчатую форму.
16. Стационарное устройство по п. 14, отличающееся тем, что содержит концевые выключатели, контактную линейку в виде стержня, выполненного с возможностью фиксации на необходимой высоте на траверсе относительно концевых выключателей.
17. Система управления и формирования импульсов напряжения для генерации индукторами регулируемых импульсов магнитного поля, содержащая диодный трехфазный выпрямитель по типу Миткевича либо по типу Ларионова, фильтр, к которому подключена мостовая схема на силовых ключевых транзисторах с возможностью соединения с соленоидами индукторов, измеритель тока с усилителем, микроконтроллерный блок управления с аналого-цифровым преобразователем, связанный с мостовой схемой через блок широтно-импульсной модуляции и радиатор охлаждения, на котором размещены мостовая схема и выпрямитель.
18. Система по п. 17, отличающаяся тем, что в мостовой схеме используются силовые ключевые транзисторы с максимальной рабочей частотой до 100 кГц.
19. Система по п. 17, отличающаяся тем, что используется измеритель тока на шунте или датчике Холла.
20. Система по п. 17, отличающаяся тем, что радиатор охлаждения содержит встроенный вентилятор.
21. Система по п. 17 или 20, отличающаяся тем, что радиатор оснащен датчиком контроля температур.
22. Индуктор магнитного поля, характеризующийся тем, что содержит каркас в виде двух дисков, закрепленных на втулке, обмотку, пропитанную теплопроводящим компаундом, в виде равных по числу витков секций, разделенных незамкнутыми кольцевыми вставками, находящихся в тепловом контакте с дисками, причем внешний диаметр обмотки индуктора соответствует ширине зоны воздействия, максимальная высота обмотки составляет величину, при которой индукция магнитного поля, генерируемого наиболее удаленным от зоны воздействия витком на внешнем радиусе, составляет не менее 75% от индукции магнитного поля, генерируемого ближайшим к зоне воздействия витком, а на дисках каркаса установлены теплосъемники, покрывающие площадь обмотки, причем диски, втулка, кольцевые вставки и теплосъемники выполнены из немагнитного теплопроводящего материала.
23. Индуктор по п. 22, отличающийся тем, что высота обмотки составляет не более 1\4 ее внешнего диаметра.
24. Индуктор по п. 22, отличающийся тем, что обмотка выполнена в виде трех равных по числу витков секций.
25. Индуктор по п. 22, отличающийся тем, что теплосъемники установлены на торцах дисков каркаса и выполнены в виде полых дисков для прокачки теплоносителя.
26. Система механического привода для формирования рабочей зоны воздействия магнитного поля, содержащая траверсу, надетую на полые стойки, и основание, под которым установлен подключенный к реверсивному блоку питания приводной электродвигатель с электромагнитным тормозом, соединенный через промежуточные валы с винтовыми домкратами и вертикальными винтовыми валами, расположенными в полых стойках, закрепленных на основании и имеющих вертикальные диаметрально расположенные прорези, через которые траверса соединена с винтовыми валами, с помощью надетых на валы винтовых втулок, прикрепленных к траверсе.
27. Система механического привода по п. 26, отличающаяся тем, что винтовая втулка, через прорези прикрепленная к траверсе, имеет цилиндрическую ступенчатую форму.
28. Система механического привода по п. 26, отличающаяся тем, что содержит концевые выключатели, контактную линейку в виде стержня, выполненного с возможностью фиксации на необходимой высоте на траверсе относительно концевых выключателей.
| RU 2051706 C1, 21.10.1991 | |||
| Установка для выращивания культуры плесневых грибов Аspergillus поверхностным методом | 1954 |
|
SU101929A1 |
| УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОЙ ГИПЕРТЕРМИИ В ЭКСПЕРИМЕНТЕ | 2001 |
|
RU2211713C2 |

