Изобретение относится к способу определения того, находится ли инжектор в заблокированном состоянии.
Инжектор является соленоидным инжектором типа инжектора мочевины, используемого в выхлопном трубопроводе моторного транспортного средства и находящегося выше по потоку от каталитического нейтрализатора оксидов азота SCR-типа (катализатор избирательного восстановления).
Инжектор впрыскивает мочевину, более конкретно, водный раствор, содержащий 32,5% по объему мочевины, в выхлопной трубопровод. Своевременно впрыснутая мочевина распространяется в SCR-катализатор, чтобы реагировать с окислами азота (NOx), поступающими из камеры сгорания двигателя и присутствующими в SCR-катализаторе. Химическая реакция производит молекулярный азот и кислород на выходе выхлопного трубопровода.
Такая SCR-система известна специалистам в области техники и позволяет существенно уменьшить количество оксида азота, выбрасываемого двигателем, которым оборудовано транспортное средство. Главный недостаток в реализации SCR-системы лежит в правильной дозировке количества мочевины, которое должно быть впрыснуто в SCR-катализатор. На практике исключительно малое количество впрыснутой мочевины не позволяет уменьшить окислы азота, присутствующие в выхлопе, в удовлетворительной пропорции. Международные стандарты, относящиеся к максимальному количеству выбросов окислов азота (NOx) в выхлопном отверстии, в таком случае больше не соблюдаются. Избыточное количество впрыснутой мочевины приводит в результате к пахучим и раздражающим утечками аммиака на выходе выхлопной трубы, что является нежелательным.
Управление количеством мочевины, которая впрыскивается инжектором, следовательно, имеет первостепенную важность. Для этого необходимо быстро обнаруживать его неисправность, более конкретно, обнаруживать заблокированный инжектор. Такие отказы инжектора могут происходить, например, когда водный раствор мочевины кристаллизуется внутри инжектора при высокой температуре (>100°C). Действительно, выше 100°C вода в водном растворе испаряется, и мочевина формирует твердые остатки. Возможно расплавлять эти остатки, нагревая мочевину выше точки ее плавления, которая равна, скажем, выше 140°C.
Для того чтобы обнаруживать неисправность инжектора мочевины, известной практикой из предыдущего уровня техники является позиционирование датчика окислов азота (NOx) ниже по потоку от SCR-катализатора. Этот датчик измеряет уровень окислов азота, присутствующих на выходе SCR-катализатора, и делает возможным обнаружение отказа инжектора мочевины. Однако в случае инжектора, который заблокирован открытым, значительное количество аммиака сначала накапливается в SCR-катализаторе до тех пор, пока последний не станет насыщенным, и NOx-датчик не мгновенно обнаруживает аномально высокое количество аммиака вследствие утечки из инжектора. Также, в случае инжектора, который заблокирован закрытым, NOx-датчик не обнаруживает достаточно быстро аномально высокое количество NOx из-за отказа инжектора, вследствие инерции химической реакции, протекающей внутри SCR-катализатора.
Кроме того, обнаружение неисправности инжектора мочевины посредством NOx-датчика не дает возможности выполнить диагностику отказа инжектора, прежде чем SCR-система будет запущена. На практике необходимо сначала активировать инжектор несколько раз посредством команд впрыска мочевины и ожидать реакции от NOx-датчика, находящегося ниже по потоку от SCR-катализатора, прежде чем появится возможность анализировать упомянутый сигнал. С использованием такого способа, являются неизбежными утечки аммиака и избыточные количества NOx в выхлопе в течение короткого интервала времени, прежде чем будет выполнено диагностирование.
Также известно из предшествующего уровня, что для того, чтобы обнаруживать заблокированный соленоидный инжектор, например топливный инжектор, необходимо измерять напряжение на клеммах инжектора. US 2012/0296553 A1 описывает систему управления для двигателя внутреннего сгорания и способ для управления упомянутым двигателем, которые делают возможным различение заблокированного топливного инжектора от "нормального" инжектора, т.е. инжектора, который работает правильно. Различение выполняется на основе измерения напряжения на клеммах инжектора. Во время команды закрытия или открытия инжектора, если последний заблокирован, напряжение на клеммах инжектора отклоняется от номинального напряжения.
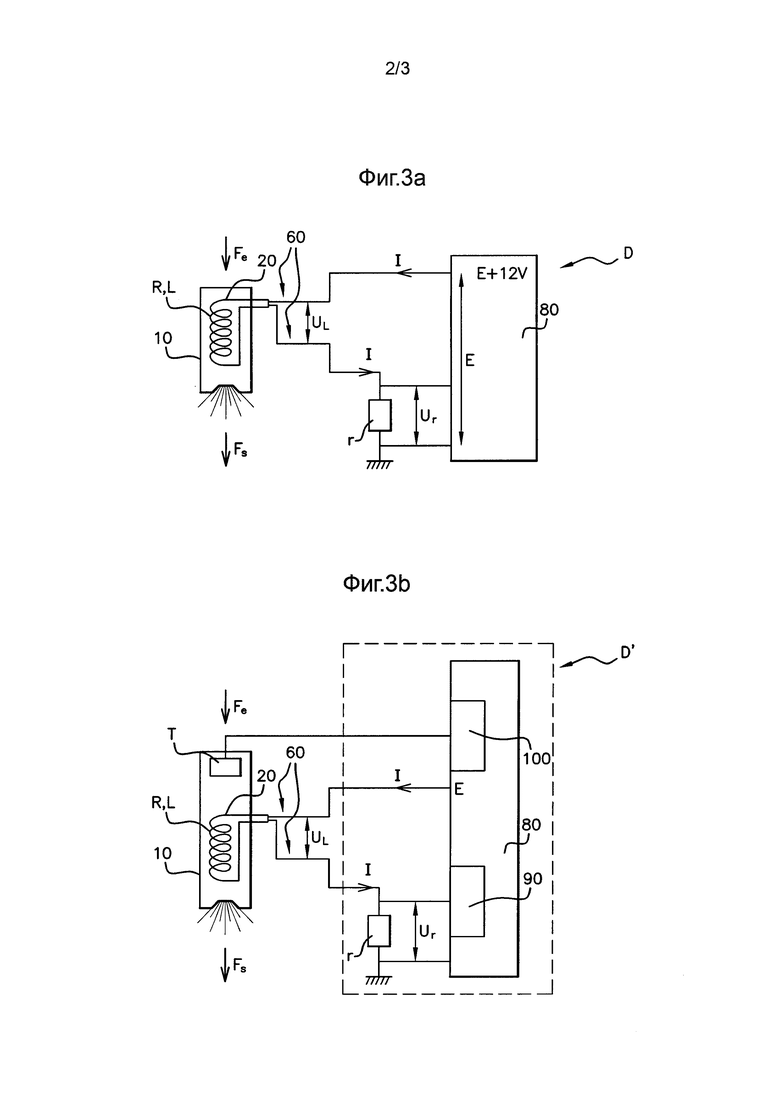
По тому же принципу производятся измерения напряжения Ur (см. фиг. 3a) на клеммах измерительного резистора для того, чтобы определять, заблокирован или нет инжектор. Фиг. 3a показывает инжектор 10 и управляющее устройство D для упомянутого инжектора 10 из предшествующего уровня техники. В инжектор, с одной стороны, подается ток (как правило, с напряжением E, равным 12 В) посредством микроконтроллера 80 и, с другой стороны, соединяется на "землю". Измерительный резистор r соединяется на одной стороне с инжектором 10, а на другой стороне - с "землей". Напряжение Ur на клеммах измерительного резистора r измеряется посредством микроконтроллера 80. По команде открытия инжектора 10 напряжение Ur увеличивается асимптотически (см. кривую B на фиг. 1), но подвергается временному уменьшению Z, когда инжектор 10 окончательно открывается. Когда инжектор 10 заблокирован (кривая A), это временное уменьшение Z не возникает в измерении напряжения Ur. Наличие или отсутствие временного уменьшения Z, следовательно, делает возможным быстрое определение того, заблокирован или нет инжектор.
Эти способы из предшествующего уровня техники представляют недостатки, они не дают возможности выполнять диагностику отказавшего инжектора перед запуском системы, с которой он ассоциируется (в нашем примере, SCR-системы).
Задачей изобретения является быстрое обнаружение неисправности инжектора мочевины до запуска SCR-системы.
Задача решается способом определения того, находится ли инжектор в заблокированном состоянии, упомянутый инжектор содержит электромагнитный соленоид с катушкой, имеющей сопротивление и индуктивность, через которую проходит ток источника питания максимальной интенсивности, и которая питается напряжением источника питания, закрытие и открытие инжектора, управляемого посредством управляющего устройства, упомянутое управляющее устройство содержит микроконтроллер и измерительный резистор, способ обнаружения согласно изобретению содержит следующие этапы:
- Этап 1: Управление открытием инжектора посредством микроконтроллера,
- Этап 2: Измерение посредством микроконтроллера интенсивности тока, проходящего через измерительный резистор, как функции времени,
- Этап 3: Определение необходимой продолжительности для интенсивности, чтобы достигать предварительно определенного значения интенсивности, более низкого, чем максимальная интенсивность, так что:
Ipred=P×Imax
где P является константой между 0 и 1,
Ipred: предварительно определенное значение (A) интенсивности,
Imax: максимальная интенсивность (A),
- Этап 4: Вычисление индуктивности катушки соленоида как функции необходимой продолжительности,
- Этап 5: Сравнение значения индуктивности, вычисленной таким образом, с пороговым значением индуктивности,
- Этап 6: Если значение индуктивности больше или равно пороговому значению, тогда инжектор заблокирован в закрытом положении, иначе
- Этап 7: Если значение индуктивности меньше порогового значения, инжектор заблокирован в открытом положении.
Изобретение является практичным, поскольку значение индуктивности само по себе делает возможным различение блокировки инжектора в закрытом положении или в открытом положении. Этапы 3-7 могут выполняться дополнительным средством вычисления, в форме программного обеспечения (например, встроенного в микроконтроллер), которое, следовательно, является недорогим и не громоздким, для того, чтобы быстро определять, заблокирован ли инжектор в открытом положении или в закрытом положении. Действительно, посредством простого измерения интенсивности I тока, проходящего через измерительный резистор r, способ согласно изобретению делает возможным быстрое выведение индуктивности L катушки соленоида и, следовательно, положения инжектора, заблокированного в закрытом положении или заблокированного в открытом положении.
Способ согласно изобретению делает возможным различение этих двух случаев (заблокирован в открытом положении или заблокирован в закрытом положении) и выполнение этого даже перед тем, как SCR-система будет запущена (т.е. перед нагнетанием давления системы и активацией насоса подачи мочевины), для того, чтобы избегать любой утечки аммиака или любого чрезмерного испускания NOx в атмосферу.
В случае инжектора, заблокированного в открытом положении, необходимо не запускать SCR-систему, т.е. не запускать насос подачи мочевины, для того, чтобы избегать любого испускания аммиака в атмосферу. Если SCR-система уже работает, тогда необходимо прекращать подачу мочевины, что означает остановку насоса подачи мочевины.
В случае инжектора, заблокированного в закрытом положении, насос подачи мочевины, наоборот, запускается для того, чтобы инициировать, посредством давления и посредством нагрева, растворение кристаллов мочевины, которые блокируют инжектор и способны повлиять на работу SCR-систему.
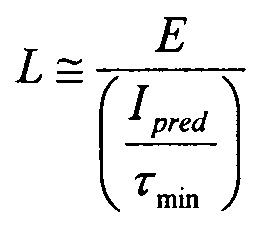
В первом варианте осуществления способа согласно изобретению, когда константа P находится между x1 и x2, где x1<x2<<1 (например, x1<0,2), тогда этап 4 состоит в следующем:
- Этап 4: Вычисление индуктивности катушки соленоида средством вычисления, согласно формуле:
где:
L: индуктивность катушки соленоида (Гн),
E: напряжение источника питания (В),
Ipred: предварительно определенная интенсивность (А),
τmin: необходимая продолжительность (с).
Во втором варианте осуществления способа согласно изобретению, когда константа P находится между x3 и x4, где x4>x3>>0 (например, x3>0,5), этап 4 состоит в следующем:
- Этап 4: Вычисление индуктивности катушки соленоида вычислительным средством, согласно формуле:
L=τ×(R+r)
где:
L: индуктивность катушки соленоида (Гн),
R: сопротивление катушки соленоида (Ом),
r: измерительное сопротивление (Ом),
τ: необходимая продолжительность (с).
Способ может дополнительно содержать этап предварительной калибровки для того, чтобы определять пороговое значение индуктивности.
В предпочтительном варианте осуществления способа согласно изобретению способ дополнительно содержит:
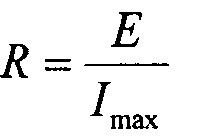
- перед этапом 1, этап вычисления, вычислительным средством, значения сопротивления катушки соленоида, так что:

где:
E: напряжение источника питания (В),
Imax: максимальная интенсивность (A),
R: сопротивление катушки соленоида (Ом),
- и этап предварительной калибровки для того, чтобы определять пороговое значение индуктивности как функции значения сопротивления катушки соленоида.
Эти дополнительные этапы делают возможным учитывать влияние температуры соленоида на значение его сопротивления и, следовательно, на вычисление индуктивности катушки соленоида.
Изобретение также относится к управляющему устройству, реализующему способ согласно признакам, перечисленным выше, так что микроконтроллер содержит средство вычисления, подходящее для:
- определения необходимой продолжительности, чтобы достигать предварительно определенного значения интенсивности, меньшего, чем максимальная интенсивность,
- вычисления индуктивности катушки соленоида,
- сравнения значения индуктивности, вычисленной таким образом, с пороговым значением индуктивности.
Во втором варианте осуществления изобретения микроконтроллер дополнительно содержит средство вычисления, подходящее для вычисления значения сопротивления катушки соленоида.
Изобретение также относится к любому транспортному средству, использующему управляющее устройство согласно признакам, перечисленным выше.
Другие цели, признаки и преимущества изобретения станут очевидными из описания, неограничивающего варианта его осуществления, приводимого со ссылкой на чертежи, на которых:
- Фиг. 1 представляет, согласно предшествующему уровню техники, тенденцию напряжения Ur на клеммах измерительного резистора r как функцию времени t во время команды открытия инжектора, для заблокированного инжектора (кривая A) и незаблокированного инжектора (кривая B),
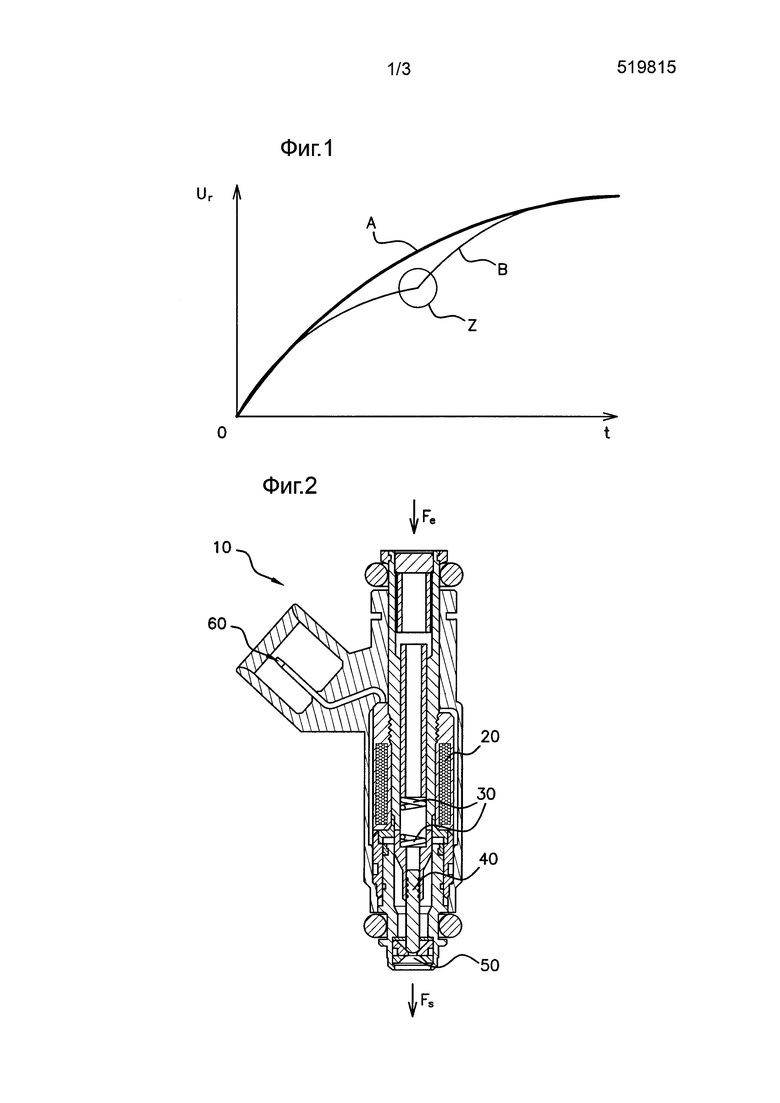
- Фиг. 2 представляет вид в поперечном разрезе соленоидного инжектора, используемого, например, для впрыска мочевины в выхлопной трубопровод моторного транспортного средства,
- Фиг. 3a представляет, согласно предшествующему уровню техники, управляющее устройство D для соленоидного инжектора,
- Фиг. 3b представляет, согласно изобретению, управляющее устройство D' для соленоидного инжектора,
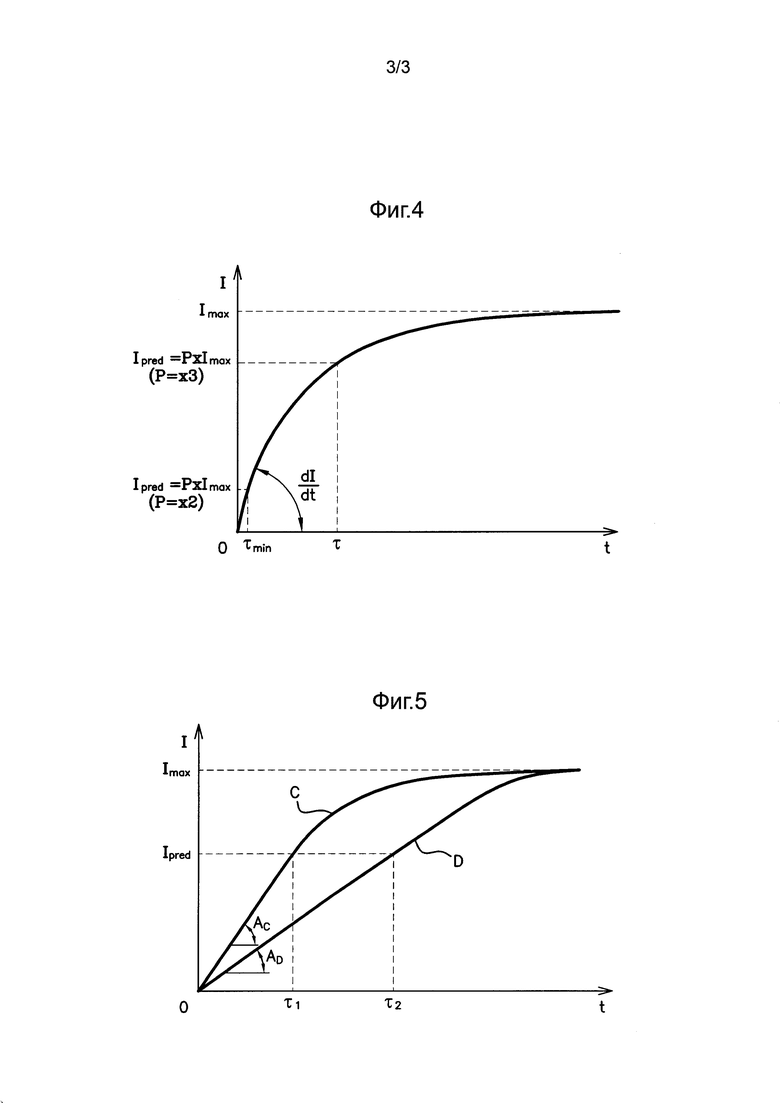
- Фиг. 4 представляет, согласно изобретению, тенденцию интенсивности I тока как функцию времени t, измеренную на клеммах измерительного резистора r во время команды открытия инжектора,
- Фиг. 5 представляет, согласно изобретению, интенсивность I тока, измеренную на клеммах измерительного резистора, как функцию времени t для инжектора, заблокированного в открытом положении (кривая C), и для инжектора, заблокированного в закрытом положении (кривая D), а также параметры, используемые, чтобы обнаруживать неисправность упомянутого инжектора.
Соленоидный инжектор 10 представлен на фиг. 2. Жидкость, здесь мочевина, например, проходит через инжектор сверху (стрелка Fe) вниз (стрелка Fs).
В инжектор 10 подается ток посредством электрического соединения 60. Ферромагнитный стержень 40, также называемый "иглой", удерживается нагруженным пружиной 30 в положении, в котором он закрывает отверстие 50. Соленоид 20, состоящий, например, из медной катушки, окружает верхнюю часть инжектора 10, в которой располагается пружина 30. Когда в соленоид 20 подается энергия с управляющим напряжением E (как правило, 12 В), катушка формирует магнитное поле, которое притягивает ферромагнитный стержень 40 к ней, ферромагнитный стержень 40, таким образом, смещается по направлению к соленоиду 20, т.е. к верху инжектора 10, сжимая пружину 30. Он, таким образом, освобождает отверстие 50, и текучая среда может протекать (стрелка Fs) из инжектора 10.
Когда управляющее напряжение больше не прикладывается к соленоиду 20, пружина 30 удерживает ферромагнитный стержень 40 под нагрузкой напротив поверхности отверстия 50, отверстие 50, таким образом, закрывается, и текучая среда не может выходить из инжектора 10.
Инжектор 10 электрическим образом связывается с управляющим устройством D' (см. фиг. 3b) через электрическое соединение 60. Управляющее устройство D' содержит, как в предшествующем уровне техники, микроконтроллер 80 и измерительный резистор r. В инжектор 10 подается мощность с напряжением E (как правило, E=12 В) посредством микроконтроллера 80. Инжектор 10 также связывается с электрическим заземлением. Измерительный резистор r, низкого значения, электрически связывается с одной стороны с инжектором 10, а с другой стороны с электрическим заземлением.
Медная катушка соленоида 20 имеет собственную индуктивность L и собственное сопротивление R. Изобретение основано на наблюдении, что индуктивность L катушки отличается, когда инжектор 10 заблокирован в открытом положении или заблокирован в закрытом положении.
Изобретение, следовательно, предлагает оценку индуктивности L катушки соленоида, на основе показателя интенсивности I тока, проходящего через измерительный резистор r, для того, чтобы определять, заблокирован ли инжектор 10 в открытом или заблокирован в закрытом положении.
Для этого, согласно изобретению, управляющее устройство D', как представлено на фиг. 3, дополнительно содержит, по сравнению с управляющим устройством D предшествующего уровня, дополнительное вычислительное средство 90, например, в форме программного обеспечения, встроенного в микроконтроллере 80, для того, чтобы выполнять способ обнаружения, детализированный ниже.
По команде открытия инжектора 10, происходящей от микроконтроллера 80, интенсивность I тока, проходящего через соленоид 20, измеряется посредством упомянутого микроконтроллера 80 с помощью измерительного резистора r. Эта интенсивность I следует асимптотической кривой, которая представлена на фиг. 4.
Интенсивность I увеличивается как функция времени t до тех пор, пока она не достигнет максимальной интенсивности Imax. Временная константа τ определяется как необходимая продолжительность, чтобы интенсивность I достигла предварительно определенного значения Ipred интенсивности, равного:
Ipred=P×Imax
где P является константой, такой как P∈[0,1].
Значение интенсивности I является функцией измерительного резистора r, а также сопротивления R катушки соленоида 20.
Напряжение E электропитания равно сумме напряжений на клеммах катушки UL и на клеммах измерительного резистора Ur:
E=UL+Ur
т.е.:
где:
E: напряжение электропитания микроконтроллера (В),
I: интенсивность тока, проходящего через соленоид (А),

R: сопротивление катушки соленоида (Ом),
L: индуктивность катушки соленоида (Гн),
Интенсивность I равна:
где:
 уравнение [1]
уравнение [1]
где:
I: интенсивность тока, проходящего через соленоид (А),
R: сопротивление катушки соленоида (Ом),
r: измерительное сопротивление (Ом),
τ: временная константа (с),
L: индуктивность катушки соленоида (Гн).
Фиг. 5 показывает, по команде открытия инжектора 10, кривые тренда интенсивности I тока, проходящего через инжектор 10, в двух случаях:
- Кривая C: инжектор 10 заблокирован в открытом положении,
- Кривая D: инжектор 10 заблокирован в закрытом положении.
Наклон AD (инжектор заблокирован в закрытом положении) тренда интенсивности I как функции времени (

Когда инжектор 10 находится в открытом заблокированном положении (кривая C), первая временная константа τ1 определяется как продолжительность, необходимая, чтобы интенсивность I достигла предварительно определенного значения Ipred интенсивности.
Когда инжектор 10 находится в закрытом заблокированном положении (кривая D), вторая временная константа τ2 определяется как продолжительность, необходимая, чтобы интенсивность I достигла предварительно определенного значения Ipred интенсивности.
На фиг. 5:
τ2>τ1
Тогда возможно вычислять первую индуктивность L1 катушки соленоида инжектора 10, заблокированного в открытом положении (кривая C), так что, согласно уравнению [1]:
L1=τ1×(R+r)
Аналогично, возможно вычислять вторую индуктивность L2 катушки соленоида инжектора 10, заблокированного в закрытом положении (кривая D), так что, согласно уравнению [1]:
L2=τ2×(R+r)
Поскольку
τ2>τ1
получается следующее:
L2>L1
Положение ферромагнитного стержня 40 относительно катушки соленоида 20 изменяет интенсивность магнитного поля, сформированного упомянутой катушкой. Когда ферромагнитный стержень 40 находится в контакте с отверстием 50 (инжектор в закрытом заблокированном положении), индуктивность L катушки является максимальной. Когда ферромагнитный стержень 40 приближается к катушке, индуктивность L уменьшается.
Поскольку L2 соответствует индуктивности катушки, когда инжектор 10 заблокирован в закрытом положении, возможно определять пороговое значение индуктивности, например, Lth=L2, ниже которого значение индуктивности L тогда соответствует инжектору 10, заблокированному в открытом положении.
На практике, когда временная константа τ является небольшой (см. τmin на фиг. 4), значение интенсивности I может быть игнорировано относительно значения наклона тренда интенсивности I как функции времени, т.е. I пренебрежимо мало относительно производной интенсивности относительно времени: 
и:
где:
E: напряжение электропитания микроконтроллера (В),
L: индуктивность катушки соленоида (Гн),

Изобретение, следовательно, предлагает два варианта осуществления, индуктивность L вычисляется двумя различными способами как функция значения временной константы τ, τmin, т.е. согласно предварительно определенному значению интенсивности Ipred и, следовательно, константы P.
В первом варианте осуществления, когда предварительно определенное значение интенсивности Ipred является небольшим, т.е. когда константа P является небольшой, например, P<<1, между x1=0,05 и x2=0,2, тогда индуктивность L вычисляется согласно:
E: напряжение электропитания микроконтроллера (В),
L: индуктивность катушки соленоида (Гн),

Во втором варианте осуществления изобретения, когда предварительно определенное значение интенсивности Ipred является большим, т.е. когда константа P является большой, например, P>>0, между x3=0,5 и x4=0,9, тогда индуктивность L вычисляется согласно формуле:
L=τ×(R+r)
где:
R: сопротивление катушки соленоида (Ом),
r: измерительное сопротивление (Ом),
τ: временная константа (с),
L: индуктивность катушки соленоида (Гн).
Таким образом, на первом этапе (1) способа согласно изобретению открытие инжектора 10 управляется с помощью микроконтроллера 80. На втором этапе (этапе 2) интенсивность I тока, проходящего через измерительный резистор r, как функция времени t, измеряется посредством микроконтроллера 80. На третьем этапе (этапе 3) вычислительное средство 90 определяет необходимую продолжительность τ, τmin, соответствующую предварительно определенному значению Ipred интенсивности (ниже максимальной интенсивности Imax). Вычислительное средство 90 является, например, программным средством, встроенным в микроконтроллер 80. Далее, индуктивность L катушки соленоида вычисляется посредством упомянутого вычислительного средства 90 как функция необходимой продолжительности τ, τmin.
После чего вычислительное средство 90 затем сравнивает значение индуктивности L, таким образом вычисляется в пороговое значение индуктивности Lth (этап 5). Это пороговое значение индуктивности Lth может быть определено ранее на этапе калибровки и сохранено в контроллере 80. Если значение индуктивности L больше или равно упомянутому пороговому значению Lth, тогда это означает, что инжектор 10 заблокирован в закрытом положении (этап 6). Если значение индуктивности L ниже упомянутого порогового значения индуктивности Lth, тогда это означает, что инжектор 10 заблокирован в открытом положении (этап 7).
Таким образом, если значение индуктивности катушки L является таким, что:
L<Lth,
тогда инжектор 10 заблокирован в открытом положении, и если:
L≥Lth,
тогда инжектор 10 заблокирован в закрытом положении.
В первом варианте осуществления, если константа P является небольшой, P<<1 лежит между двумя значениями (x1, x2), тогда индуктивность L вычисляется вычислительным средством 90 согласно формуле (этап 4):
Во втором варианте осуществления, если константа P является большой, P>>0, лежит между двумя другими значениями (x3, x3), тогда индуктивность L вычисляется вычислительным средством 90 согласно формуле (этап 4):
L=τ×(R+r)
Как упомянуто выше, определение порогового значения Lth индуктивности, например, выполняется на этапе предварительной калибровки, во время которого значение индуктивности L2, соответствующее инжектору 10, заблокированному в закрытом положении, измеряется на множестве инжекторов 10. Также возможно рассматривать определение порогового значения Lth индуктивности для каждого инжектора 10, пороговое значение индуктивности Lth тогда хранится в микроконтроллере 80 в паре с каждым инжектором 10 для того, чтобы сравниваться с индуктивностью L, измеренной для упомянутого инжектора 10.
После необходимости сначала оснащения микроконтроллера 80 вычислительным средством 90 способ согласно изобретению, следовательно, содержит следующие этапы:
- Этап 1: Управление открытием инжектора 10 посредством микроконтроллера 80,
- Этап 2: Измерение посредством микроконтроллера 80 интенсивности I тока, проходящего через измерительный резистор r, как функции времени,
- Этап 3: Определение вычислительным средством 90 необходимой продолжительности τ, τmin, чтобы интенсивность I достигла предварительно определенного значения Ipred интенсивности, меньшей, чем максимальная интенсивность Imax, так что:
Ipred=P×Imax
где P является константой между 0 и 1,
- Этап 4: Вычисление индуктивности L катушки соленоида 20 вычислительным средством 90 как функции необходимой продолжительности τ, τmin,
- Этап 5: Сравнение вычислительным средством 90 значения индуктивности L, вычисленного таким образом, с предварительно сохраненным пороговым значением индуктивности Lth,
- Этап 6:
Если значение индуктивности L больше или равно пороговому значению Lth индуктивности, тогда инжектор 10 заблокирован в закрытом положении, иначе
- Этап 7: Если значение индуктивности L меньше порогового значения Lth индуктивности, инжектор 10 заблокирован в открытом положении.
Если константа P находится между x1 и x2, тогда этап 4 заключается в следующем:
- Этап 4: Вычисление индуктивности L катушки соленоида 20 вычислительным средством 90 согласно формуле:
где:
E: напряжение электропитания микроконтроллера в вольтах (В),
Ipred: предварительно определенное значение (A) интенсивности,
τmin: необходимая продолжительность (с).
Например, x1=0,05, x2=0,2.
Если константа P находится между x3 и x4, тогда этап 4 заключается в следующем:
- Этап 4: Вычисление индуктивности L катушки соленоида 20 вычислительным средством 90 согласно формуле:
L=τ×(R+r)
где:
L: индуктивность катушки соленоида (Гн),
R: сопротивление катушки соленоида (Ом),
r: измерительное сопротивление (Ом),
τ: необходимая продолжительность или временная константа (с).
Например, x3=0,5 и x4=0,9.
Однако температура соленоида 90 влияет на значение сопротивления R катушки соленоида 20.
И, следовательно, согласно уравнению ниже, интенсивность I изменяется как функция значения сопротивления R катушки соленоида 20:
Значение интенсивности I как функция времени t, измеренное посредством микроконтроллера 80, также изменяется как функция температуры соленоида 20. Результатом этого является то, что значение индуктивности L, вычисленное для значения I интенсивности, зависит от температуры соленоида.
Следовательно изобретение предлагает, во втором варианте осуществления, первую оценку значения сопротивления R катушки соленоида перед вычислением индуктивности L.
Вычисление значения сопротивления R катушки выполняется вычислительным средством 90, когда интенсивность I, измеренная посредством микроконтроллера 80, достигла своего максимального значения Imax.
В этом случае,

где 
получается следующее:

где:
E=UL+Ur,
и в котором E является напряжением электропитания (В) от микроконтроллера и, как правило, находится в области 12 В.
Способ в этом втором варианте осуществления, следовательно, содержит, перед этапом 1, этап вычисления, вычислительным средством 90, значения сопротивления R катушки, так что:
Следующие этапы 1-7 идентичны первому варианту осуществления.
Однако пороговое значение индуктивности Lth, используемое в сравнении на этапе 5, определяется ранее как функция значения сопротивления R катушки. Таким образом, сравнение между вычисленным значением индуктивности L и пороговым значением Lth индуктивности выполняется для одного и того же значения сопротивления R катушки.
Способ согласно изобретению является практичным, поскольку он требует только дополнительного вычислительного средства 90, в форме программного обеспечения, которое, следовательно, является недорогим и негромоздким для того, чтобы быстро определять, заблокирован ли инжектор 10 в открытом положении или в закрытом положении.
Изобретение, следовательно, делает возможным, при одной команде для открытия инжектора, без запуска работы SCR-системы (нет необходимости повышать давление в системе, нет активации насоса подачи мочевины) и посредством простого измерения интенсивности I тока, проходящего через измерительный резистор r, быстро выводить из этого индуктивность L катушки соленоида 20 и, следовательно, положение инжектора 10, заблокированного в закрытом положении или заблокированного в открытом положении.
Таким образом, соответствующие действия, останавливающие насос подачи мочевины (инжектор заблокирован открытым) или, наоборот, активизирующие упомянутый насос (инжектор заблокирован закрытым), могут быть немедленно реализованы в транспортном средстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ ИЗВЛЕЧЕНИЯ ЖИДКОЙ ПРИСАДКИ ИЗ РЕЗЕРВУАРА | 2014 |
|
RU2643279C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ЕГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2533382C2 |
| СПОСОБ РАСЧЕТА ТОКА ВОЗБУЖДЕНИЯ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА | 2004 |
|
RU2384435C2 |
| УСТРОЙСТВО И СПОСОБ ДИАГНОСТИКИ СОЛЕНОИДНЫХ КЛАПАНОВ | 2018 |
|
RU2758717C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО СОЛЕНОИДА | 2019 |
|
RU2719336C1 |
| Способ определения значения стационарного сопротивления заземляющего устройства опор воздушных линий электропередачи без отсоединения грозозащитного троса и устройство для его реализации | 2019 |
|
RU2726042C1 |
| УСТРОЙСТВО И СПОСОБ ДИАГНОСТИКИ СОЛЕНОИДНЫХ КЛАПАНОВ | 2018 |
|
RU2768368C2 |
| СЕКЦИЯ ТРУБОПРОВОДА ОТРАБОТАВШИХ ГАЗОВ ДЛЯ ПОДВОДА ЖИДКОЙ ПРИСАДКИ | 2014 |
|
RU2669982C2 |
| КАТУШКА ВЫСОКОДОБРОТНОГО ИМПУЛЬСНОГО СОЛЕНОИДА | 2009 |
|
RU2508573C2 |
| КОРПУС | 2012 |
|
RU2608708C2 |
В изобретении предложен способ для определения того, находится ли инжектор (10) в заблокированном состоянии, причем инжектор содержит катушку сопротивления R и индуктивности L, через которую проходит ток электропитания максимальной интенсивности (Imax) и которая питается напряжением E, причем в способе:
- управляют открытием инжектора,
- измеряют интенсивность I тока, проходящего через измерительный резистор r, как функции времени t,
- определяют продолжительность τ, необходимую для достижения предварительно определенного значения (Ipred) интенсивности, более низкого, чем максимальная интенсивность (Imax),
- вычисляют индуктивность L как функцию необходимой продолжительности, причем
- если L≥Lth, инжектор заблокирован в закрытом положении, иначе
- если L<Lth, инжектор заблокирован в открытом положении, где Lth является пороговым значением индуктивности. 4 н. и 4 з.п. ф-лы, 6 ил.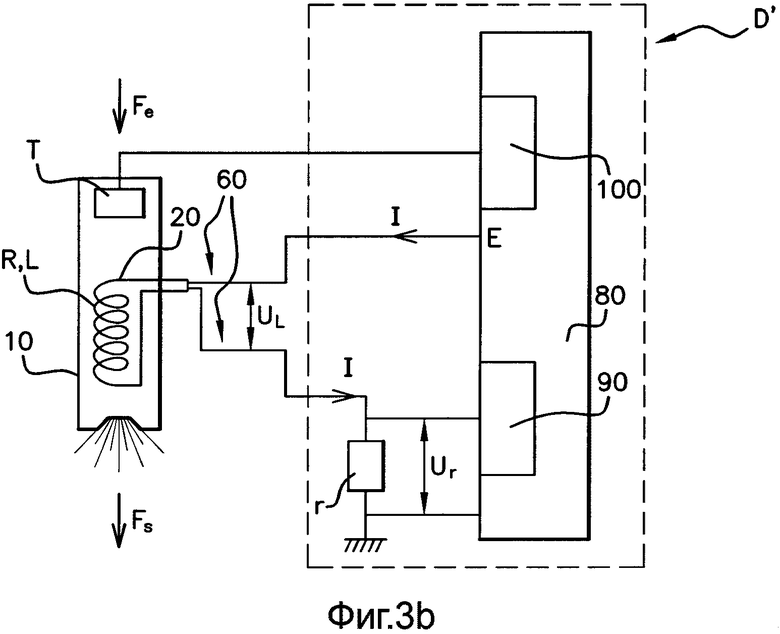
1. Способ определения фактора блокировки инжектора (10), содержащего электромагнитный соленоид (20) с катушкой, имеющей сопротивление (R) и индуктивность (L), через которую проходит ток электропитания максимальной интенсивности (Imax) и которая питается напряжением (Е) электропитания, причем закрытием и открытием инжектора (10) управляют посредством управляющего устройства (D'), содержащего микроконтроллер (80) и измерительный резистор (r), причем способ отличается тем, что содержит следующие этапы:
этап 1, на котором управляют открытием инжектора (10) посредством микроконтроллера (80),
этап 2, на котором измеряют посредством микроконтроллера (80) интенсивность (I) тока, проходящего через измерительный резистор (r), как функции времени (t),
этап 3, на котором определяют необходимую продолжительность (τ, τmin), при которой интенсивность тока (I) достигает предварительно определенное значение (Ipred) интенсивности, более низкое, чем максимальная интенсивность (Imax), так что:
Ipred=P⋅Imax
где Р является константой между 0 и 1,
Ipred: предварительно определенное значение (А) интенсивности,
Imax: максимальная интенсивность (А),
этап 4, на котором вычисляют индуктивность (L) катушки соленоида (20) как функцию упомянутой необходимой продолжительности (τ, τmin),
этап 5, на котором сравнивают значения индуктивности (L), вычисленной таким образом, с пороговым значением индуктивности (Lth),
этап 6, на котором, если значение индуктивности (L) больше порогового значения индуктивности (Lth) или равно ему, инжектор (10) оказывается заблокированным в закрытом положении,
этап 7, на котором, если значение индуктивности (L) меньше порогового значения (Lth) индуктивности, инжектор (10) заблокирован в открытом положении.
2. Способ по п. 1, отличающийся тем, что константа Р находится между x1 и х2, где х1<х2<<1, причем:
на этапе 4: производят вычисление индуктивности (L) катушки соленоида (20) согласно формуле:
где:
Е: напряжение источника питания (В),
Ipred: предварительно определенная интенсивность (А),
τmin: необходимая продолжительность (с).
3. Способ по п. 2, отличающийся тем, что, когда константа Р находится между х3 и х4, где х4>х3>>0, на этапе 4 производят вычисление индуктивности (L) соленоида (20) согласно формуле:
L=τ⋅(R+r)
где:
L: индуктивность катушки соленоида (Гн),
R: сопротивление катушки соленоида (Ом),
r: измерительное сопротивление (Ом),
τ: необходимая продолжительность (с).
4. Способ по любому из пп. 1-3, отличающийся тем, что способ дополнительно содержит этап предварительной калибровки для определения порогового значения индуктивности (Lth).
5. Способ по любому из пп. 1-3, отличающийся тем, что упомянутый способ, перед этапом 1, дополнительно содержит:
этап, на котором вычисляют значения сопротивления (R) катушки соленоида, так что:
где:
Е: напряжение источника питания (В),
Imax: максимальная интенсивность (А),
R: сопротивление катушки соленоида (Ом),
этап, на котором производят предварительную калибровку для определения порогового значения индуктивности (Lth) как функции значения сопротивления катушки (R) соленоида.
6. Управляющее устройство (D'), реализующее способ по любому из пп. 1-4, отличающееся тем, что содержит микроконтроллер (80), содержащий вычислительное средство (90), выполненное с возможностью:
- определения необходимой продолжительности (τ, τmin), для получения предварительно определенного значения (Ipred) интенсивности, более низкого, чем максимальная интенсивность (Imax),
- вычисления индуктивности (L) катушки соленоида (20),
- сравнения значения индуктивности (L), вычисленной таким образом, с пороговым значением индуктивности (Lth).
7. Управляющее устройство (D'), реализующее способ по п. 5, отличающееся тем, что содержит микроконтроллер (80), содержащий вычислительное средство (90), выполненное с возможностью:
- вычисления значения сопротивления (R) катушки соленоида,
- определения необходимой продолжительности (τ, τmin), для получения предварительно определенного значения (Ipred) интенсивности, более низкого, чем максимальная интенсивность (Imax)
- вычисления индуктивности (L) катушки соленоида (20),
- сравнения значения индуктивности (L), вычисленного таким образом, со значением сопротивления (R) катушки соленоида с пороговым значением индуктивности (Lth), предварительно определенным для того же значения сопротивления (R) катушки.
8. Транспортное средство, использующее управляющее устройство (D') по п. 6 или 7.
| US 20080148831 A1, 26.06.2008 | |||
| WO 2011114365 A1, 22.09.2011 | |||
| US 20080236685 A1, 02.10.2008 | |||
| УЗЕЛ ПОДАЧИ ТЕКУЧЕЙ СРЕДЫ, СИСТЕМА УВЕЛИЧЕНИЯ МОЩНОСТИ И СПОСОБ ИНЖЕКТИРОВАНИЯ ТЕКУЧЕЙ СРЕДЫ | 2009 |
|
RU2425994C2 |

