Область техники
[0001] Настоящее изобретение относится к устройству управления для линейного соленоида и, в частности, связано с технологиями для уменьшения этапов адаптации для адаптации параметров системы управления с обратной связью для управления линейным соленоидом.
Уровень техники
[0002] Известен электронный модуль управления (ECU), в котором параметры системы управления с обратной связью для линейного соленоида, который используется в линейном соленоидном клапане и т.п., например, определяются для каждого из различных уровней значения состояния, такого как напряжение источника мощности, которое представляет собой фактор скорости отклика, и определенные параметры сохраняются в ROM, включенном в электронный модуль управления, так что постоянная скорость отклика реализована при любом уровне значения состояния, такого как напряжение источника мощности. В качестве примера такого электронного модуля управления, устройство управления для линейного соленоида раскрыто в патентном документе 1.
Документы предшествующего уровня техники
[0003] Патентный документ 1: JP-2003-67006A
Патентный документ 2: JP-2009-14118A
Патентный документ 3: JP-2004-212182A
Сущность изобретения
[0004] В устройстве управления для линейного соленоида, раскрытом в вышеуказанном патентном документе 1, необходимо получать скорость отклика при каждом из различных уровней значения состояния в качестве фактора скорости отклика таким образом, чтобы надлежащим образом определять параметры системы управления с обратной связью для различных уровней значения состояния, в целях получения высокой скорости отклика, без формирования вибрации в системе управления с обратной связью. Таким образом, требуется очень большое число этапов адаптации, т.е. этапов для адаптации параметров для каждого из различных уровней значения состояния.
[0005] Настоящее изобретение осуществлено с учетом предшествующего уровня техники, описанного выше. В силу этого цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления для линейного соленоида, которое допускает уменьшение этапов адаптации для адаптации параметров, которые применяются в системе управления с обратной связью устройства управления. Это цель достигается согласно следующим аспектам настоящего изобретения.
[0006] Согласно первому аспекту изобретения, предусмотрено устройство управления для управления линейным соленоидом посредством управления управляющим током, подаваемым в линейный соленоид, через управление с обратной связью, при этом управление с обратной связью выполняется с помощью системы управления с обратной связью, имеющей параметры, которые определяются в соответствии со способом ILQ-проектирования, при этом усиление передаточной функции, которая представляет отношение вывода к возмущениям в системе управления с обратной связью, ниже 0 [дБ] по всем частотным диапазонам. Следует отметить, что, например, когда управляющий ток, подаваемый в линейный соленоид, управляется посредством входного напряжения, которое получается посредством принудительного управления напряжением аккумулятора путем включения/выключения на основе PWM-сигнала, устройство управления может включать в себя: узел аппроксимации электрической схемы, выполненный с возможностью аппроксимировать электрическую схему линейного соленоида, через которую протекает управляющий ток, посредством последовательной схемы из сопротивления и индуктивности; первый узел формулирования, выполненный с возможностью формулировать уравнение схемы, связанное с мгновенным значением управляющего тока, протекающего через последовательную схему; второй узел формулирования, выполненный с возможностью формулировать уравнение, связанное с регулируемой переменной для управления управляющим током; узел извлечения рекуррентных уравнений, выполненный с возможностью извлекать рекуррентное уравнение из уравнения, связанного с регулируемой переменной; узел решения рекуррентных уравнений, выполненный с возможностью решать рекуррентное уравнение; узел линеаризации, выполненный с возможностью линеаризовать решенное рекуррентное уравнение, линеаризованное посредством аппроксимирующего уравнения; и узел извлечения передаточных функций, выполненный с возможностью извлекать, из линеаризованного уравнения, связанного с регулируемой переменной, передаточную функцию управления с обратной связью, которая должна использоваться для того, чтобы определять регулируемую переменную.
[0007] Согласно второму аспекту изобретения, в устройстве управления согласно первому аспекту изобретения, линейный соленоид предоставляется в линейном соленоидном клапане, при этом линейный соленоидный клапан выполнен с возможностью выводить сигнальное давление, величина которого соответствует управляющему току, который определяется через управление с обратной связью.
[0008] Согласно третьему аспекту изобретения, в устройстве управления согласно второму аспекту изобретения, в модуле гидравлического управления автоматической трансмиссии транспортного средства, линейный соленоидный клапан выполнен с возможностью подавать сигнальное давление в клапан регулирования давления в магистрали для управления давлением в магистрали, сформированным посредством клапана регулирования давления в магистрали.
[0009] Согласно четвертому аспекту изобретения, в устройстве управления согласно второму аспекту изобретения, в модуле гидравлического управления автоматической трансмиссии транспортного средства, линейный соленоидный клапан выполнен с возможностью подавать сигнальное давление в гидравлические фрикционные зацепляющие устройства для управления гидравлическими фрикционными зацепляющими устройствами, которые работают с возможностью устанавливать позиции передач в автоматической трансмиссии транспортного средства.
[0010] Согласно пятому аспекту изобретения, в устройстве управления согласно первому аспекту изобретения, линейный соленоид предоставляется в приводе, при этом в модуле гидравлического управления для управления механизмом регулируемых фаз газораспределения, выполненным с возможностью регулировать время открытия/закрытия клапанов двигателя транспортного средства, привод выполнен с возможностью подавать, в механизм регулируемых фаз газораспределения, сигнальное давление, величина которого соответствует управляющему току, который определяется через управление с обратной связью, для формирования гидравлического давления для регулирования времени открытия/закрытия.
[0011] Согласно шестому аспекту изобретения, в устройстве управления согласно первому аспекту изобретения, управляющий ток, подаваемый в линейный соленоид, управляется посредством входного напряжения, которое получается посредством принудительного управления напряжением аккумулятора путем включения/выключения на основе PWM-сигнала, при этом электрическая схема линейного соленоида, через которую протекает управляющий ток, аппроксимируется посредством последовательной схемы из сопротивления и индуктивности, при этом уравнение схемы, связанное с мгновенным значением управляющего тока, протекающего через последовательную схему, формулируется, при этом уравнение, связанное с регулируемой переменной для управления управляющим током, формулируется, при этом уравнение, связанное с регулируемой переменной, извлекается в качестве рекуррентного уравнения, при этом рекуррентное уравнение решается, и решенное рекуррентное уравнение линеаризуется посредством аппроксимирующего уравнения, при этом передаточная функция управления с обратной связью извлекается из линеаризованного уравнения, связанного с регулируемой переменной, и извлеченная передаточная функция используется для того, чтобы определять регулируемую переменную.
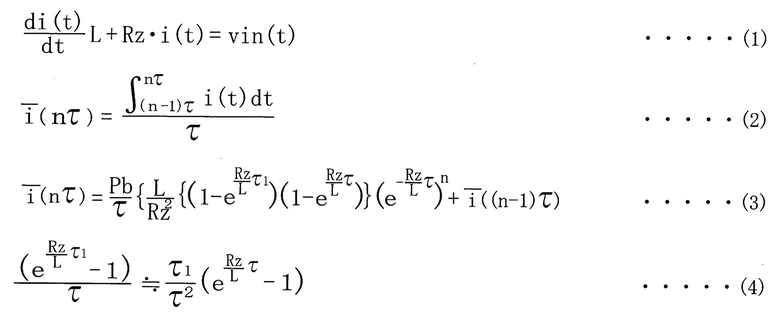
[0012] Согласно седьмому аспекту изобретения, в устройстве управления согласно шестому аспекту изобретения, в котором уравнение схемы формулируется в качестве уравнения (1), уравнение, связанное с регулируемой переменной, которая представляет собой среднее значение управляющего тока в n-ый период (n: натуральное число), формулируется в качестве уравнения (2), рекуррентное уравнение формулируется в качестве уравнения (3), и аппроксимирующее уравнение формулируется в качестве уравнения (4), где "t [с]" представляет время, "τ [с]" представляет каждый период возбуждения PWM-сигнала, "τ1 [с]" представляет время включения, которое представляет собой продолжительность, в течение которой управляющий ток (i(t)) подается в линейный соленоид в каждый период возбуждения, "Pb [В]" представляет напряжение аккумулятора, и "L (Гн)" представляет индуктивность.
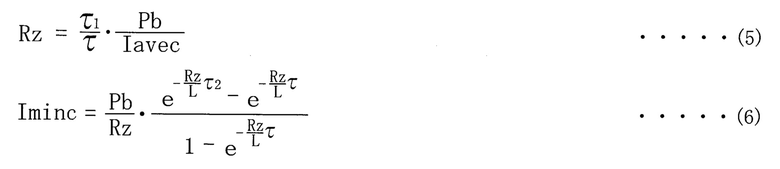
[0013] Согласно восьмому аспекту изобретения, в устройстве управления согласно первому аспекту изобретения, управляющий ток, подаваемый в линейный соленоид, управляется посредством входного напряжения, которое получается посредством принудительного управления напряжением аккумулятора путем включения/выключения на основе PWM-сигнала, при этом сопротивление Rz [Ом] электрической схемы линейного соленоида, через которую протекает управляющий ток, вычисляется в соответствии с уравнением (5), и индуктивность L[Гн] электрической схемы вычисляется в соответствии с уравнением (6), где "τ [с]" представляет каждый период возбуждения PWM-сигнала, "τ1 [с]" представляет время включения, которое представляет собой продолжительность, в течение которой управляющий ток подается в линейный соленоид в каждый период возбуждения, "τ2 [с]" представляет время выключения, которое представляет собой продолжительность, в течение которой управляющий ток не подается в линейный соленоид в каждый период возбуждения, "Pb [В]" представляет напряжение аккумулятора, "Iavec" представляет среднее значение управляющего тока в сходящемся состоянии, и "Iminc" представляет минимальное значение мгновенного тока для управляющего тока в сходящемся состоянии, в котором параметры корректируются в зависимости от сопротивления Rz [Ом] и индуктивности L[Гн], которые вычисляются в соответствии с надлежащими уравнениями (5) и (6).
[0014] В устройстве управления согласно первому аспекту изобретения, управление с обратной связью выполняется с помощью системы управления с обратной связью, имеющей параметры, которые определяются в соответствии со способом ILQ-проектирования, при этом усиление передаточной функции, которая представляет отношение вывода к возмущениям в системе управления с обратной связью, ниже 0 [дБ] по всем частотным диапазонам. С использованием системы управления с обратной связью, имеющей параметры, определенные в соответствии со способом ILQ-проектирования, можно уменьшать этапы адаптации для адаптации параметров для каждого из различных уровней значения состояния, такого как напряжение источника мощности, которое представляет собой фактор скорости отклика. Дополнительно, при выполнении управления с обратной связью с помощью системы управления с обратной связью, управляющий ток управляется таким образом, что управляющий ток сходится к целевому значению управления (соответствующему значению команды управления) при высокой скорости отклика относительно ступенчатого изменения целевого значения управления и ступенчатого изменения напряжения аккумулятора схемы возбуждения линейного соленоида, без принудительной вибрации системы управления и без вызывания связанной вибрации в линейном соленоиде.
[0015] В устройстве управления согласно второму аспекту изобретения, линейный соленоид предоставляется в линейном соленоидном клапане, при этом линейный соленоидный клапан выполнен с возможностью выводить сигнальное давление, величина которого соответствует управляющему току, который определяется через управление с обратной связью. Вследствие этой компоновки, управляющий ток линейного соленоида сходится к целевому значению управления при высокой скорости отклика без флуктуации управляющего тока, за счет чего сигнальное давление, выведенное из линейного соленоидного клапана, может управляться с возможностью предоставлять высокую скорость отклика без ее флуктуации.
[0016] В устройстве управления согласно третьему аспекту изобретения, в модуле гидравлического управления автоматической трансмиссии транспортного средства, линейный соленоидный клапан выполнен с возможностью подавать сигнальное давление в клапан регулирования давления в магистрали для управления давлением в магистрали, сформированным посредством клапана регулирования давления в магистрали. Вследствие этой компоновки, сигнальное давление, которое служит для управления давлением в магистрали, сформированным посредством клапана регулирования давления в магистрали, предоставленного в автоматической трансмиссии транспортного средства, может управляться с возможностью предоставлять высокую скорость отклика без ее флуктуации, за счет чего давление в магистрали, сформированное посредством клапана регулирования давления в магистрали, также может управляться с возможностью предоставлять высокую скорость отклика без ее флуктуации.
[0017] В устройстве управления согласно четвертому аспекту изобретения, в модуле гидравлического управления автоматической трансмиссии транспортного средства, линейный соленоидный клапан выполнен с возможностью подавать сигнальное давление в гидравлические фрикционные зацепляющие устройства для управления гидравлическими фрикционными зацепляющими устройствами, которые работают с возможностью устанавливать позиции передач в автоматической трансмиссии транспортного средства. Вследствие этой компоновки, сигнальное давление, которое служит для управления гидравлическими фрикционными зацепляющими устройствами, предоставленными в автоматической трансмиссии транспортного средства, может управляться с возможностью предоставлять высокую скорость отклика без ее флуктуации, за счет чего зацепление и расцепление действий каждого из гидравлических фрикционных зацепляющих устройств также может управляться с возможностью предоставлять высокую скорость отклика без ее вибрации.
[0018] В устройстве управления согласно пятому аспекту изобретения, линейный соленоид предоставляется в приводе, при этом в модуле гидравлического управления для управления механизмом регулируемых фаз газораспределения, выполненным с возможностью регулировать время открытия/закрытия клапанов двигателя транспортного средства, привод выполнен с возможностью подавать, в механизм регулируемых фаз газораспределения, сигнальное давление, величина которого соответствует управляющему току, который определяется через управление с обратной связью, для формирования гидравлического давления для регулирования времени открытия/закрытия. Вследствие этой компоновки, сигнальное давление, которое подается в механизм регулируемых фаз газораспределения, выполненный с возможностью регулировать время открытия/закрытия клапанов двигателя транспортного средства, может управляться с возможностью предоставлять высокую скорость отклика без ее флуктуации, за счет чего регулирование времени открытия/закрытия посредством механизма регулируемых фаз газораспределения также может управляться с возможностью предоставлять высокую скорость отклика без ее вибрации.
[0019] В устройстве управления согласно шестому аспекту изобретения, управляющий ток, подаваемый в линейный соленоид, управляется посредством входного напряжения, которое получается посредством принудительного управления напряжением аккумулятора путем включения/выключения на основе PWM-сигнала, при этом электрическая схема линейного соленоида, через которую протекает управляющий ток, аппроксимируется посредством последовательной схемы из сопротивления и индуктивности, при этом уравнение схемы, связанное с мгновенным значением управляющего тока, протекающего через последовательную схему, формулируется, при этом уравнение, связанное с регулируемой переменной для управления управляющим током, формулируется, при этом уравнение, связанное с регулируемой переменной, извлекается в качестве рекуррентного уравнения, при этом рекуррентное уравнение решается, и решенное рекуррентное уравнение линеаризуется посредством аппроксимирующего уравнения, при этом передаточная функция управления с обратной связью извлекается из линеаризованного уравнения, связанного с регулируемой переменной, и извлеченная передаточная функция используется для того, чтобы определять регулируемую переменную. Таким образом, передаточная функция, которая точно линеаризуется и аппроксимируется, извлекается, за счет чего регулируемая переменная определяется посредством вычислений таким образом, что можно уменьшать этапы адаптации для адаптации параметров для каждого из различных уровней значения состояния, такого как напряжение источника мощности, которое представляет собой фактор скорости отклика.
[0020] В устройстве управления согласно седьмому аспекту изобретения, уравнение схемы формулируется в качестве уравнения (1), уравнение, связанное с регулируемой переменной, которая представляет собой среднее значение управляющего тока в n-ый период (n: натуральное число), формулируется в качестве уравнения (2), рекуррентное уравнение формулируется в качестве уравнения (3), и аппроксимирующее уравнение формулируется в качестве уравнения (4), где "t [с]" представляет время, "τ [с]" представляет каждый период возбуждения PWM-сигнала, "τ1 [с]" представляет время включения, которое представляет собой продолжительность, в течение которой управляющий ток (i(t)) подается в линейный соленоид в каждый период возбуждения, "Pb [В]" представляет напряжение аккумулятора, и "L (Гн)" представляет индуктивность. Таким образом, передаточная функция, которая точно линеаризуется и аппроксимируется, извлекается посредством уравнений (3), (4), за счет чего регулируемая переменная определяется посредством вычислений таким образом, что можно уменьшать этапы адаптации.
[0021] В устройстве управления согласно восьмому аспекту изобретения, управляющий ток, подаваемый в линейный соленоид, управляется посредством входного напряжения, которое получается посредством принудительного управления напряжением аккумулятора путем включения/выключения на основе PWM-сигнала, при этом сопротивление Rz [Ом] электрической схемы линейного соленоида, через которую протекает управляющий ток, вычисляется в соответствии с уравнением (5), и индуктивность L[Гн] электрической схемы вычисляется в соответствии с уравнением (6), где "τ [с]" представляет каждый период возбуждения PWM-сигнала, "τ1 [с]" представляет время включения, которое представляет собой продолжительность, в течение которой управляющий ток подается в линейный соленоид в каждый период возбуждения, "τ2 [с]" представляет время выключения, которое представляет собой продолжительность, в течение которой управляющий ток не подается в линейный соленоид в каждый период возбуждения, "Pb [В]" представляет напряжение аккумулятора, "Iavec" представляет среднее значение управляющего тока в сходящемся состоянии, и "Iminc" представляет минимальное значение мгновенного тока для управляющего тока в сходящемся состоянии, при этом параметры корректируются в зависимости от сопротивления Rz [Ом] и индуктивности L[Гн], которые вычисляются в соответствии с надлежащими уравнениями (5) и (6). Таким образом, фактические значения сопротивления Rz и индуктивности L даже после износа в течение множества лет после изготовления транспортного средства или даже при необычном условии, таком как низкая или высокая температура, могут вычисляться посредством уравнений (5) и (6). Таким образом, параметры системы управления с обратной связью корректируются в зависимости от фактических значений сопротивления Rz и индуктивности L, которые вычисляются так, как описано выше, так что можно уменьшать ухудшение характеристик динамических характеристик управления при управлении линейным соленоидом.
Краткое описание чертежей
[0022] Фиг. 1 является видом, схематично показывающим конструкцию устройства передачи движущей силы транспортного средства, включающего в себя электронный модуль управления, к которому применяется настоящее изобретение;
Фиг. 2 является таблицей, поясняющей комбинацию каждой из позиций передач автоматической трансмиссии, показанной на фиг. 1, и соответствующих одного или более гидравлических фрикционных зацепляющих устройств автоматической трансмиссии, которые должны зацепляться, чтобы устанавливать каждую из позиций передач в автоматической трансмиссии;
Фиг. 3 является блок-схемой, схематично показывающей основную конструкцию модуля гидравлического управления, выполненного с возможностью управлять автоматической трансмиссией, показанной на фиг. 1;
Фиг. 4 является принципиальной гидравлической схемой, показывающей устройство формирования давления в магистрали, показанное на фиг. 3;
Фиг. 5 является функциональной блок-схемой, показывающей, посредством примеров, эквивалентную схему линейного соленоида SSLT, показанного на фиг. 4, схему DRV возбуждения линейного соленоида SSLT и электронный модуль управления для линейного соленоида SSLT, при этом электронный модуль управления проектируется в соответствии со способом ILQ-проектирования согласно варианту осуществления изобретения;
Фиг. 6 является функциональной блок-схемой, показывающей, посредством других примеров, эквивалентную схему линейного соленоида SSLT, показанного на фиг. 4, схему DRV возбуждения линейного соленоида SSLT и электронный модуль управления для линейного соленоида SSLT, при этом электронный модуль управления проектируется в соответствии со способом ILQ-проектирования согласно варианту осуществления изобретения;
Фиг. 7A и 7B являются видами, поясняющими изменение мгновенного значения управляющего тока, при котором управляющий транзистор, показанный на фиг. 6, подвергается управлению включением/выключением с подачей PWM-сигнала, а также изменение среднего мгновенного значения управляющего тока в каждый период возбуждения;
Фиг. 8 является функциональной блок-схемой, показывающей процесс проектирования системы управления с обратной связью в электронном модуле управления, показанном на фиг. 6;
Фиг. 9 является блок-схемой последовательности операций способа, показывающей процесс проектирования системы управления с обратной связью в электронном модуле управления, показанном на фиг. 6, а также определение регулируемой переменной в спроектированной системе управления с обратной связью;
Фиг. 10 является результатом моделирования, в котором скважность импульсов изменяется с 0% до 50% в момент 0 [с] времени, и показывает временную характеристику в качестве результата моделирования,
Фиг. 11 является видом, показывающим взаимосвязь между выводом y1 и временем τ1 включения и взаимосвязь между выводом y2 и временем τ1 включения, при этом вывод y1 имеет линейную взаимосвязь относительно возможных значений времени τ1 включения, в то время как вывод y2 имеет нелинейную взаимосвязь относительно возможных значений времени τ1 включения;
Фиг. 12 является результатом моделирования, в котором скважность импульсов задается равной 5%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения;
Фиг. 13 является результатом моделирования, в котором скважность импульсов задается равной 10%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения;
Фиг. 14 является результатом моделирования, в котором скважность импульсов задается равной 20%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения;
Фиг. 15 является результатом моделирования, в котором скважность импульсов задается равной 30%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения;
Фиг. 16 является результатом моделирования, в котором скважность импульсов задается равной 50%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения;
Фиг. 17 является результатом моделирования, в котором скважность импульсов задается равной 50%, и показывает ступенчатый отклик в качестве результата моделирования в случае непрерывного модельного уравнения, а также в случае дискретного модельного уравнения;
Фиг. 18A и 18B показывают диаграмму Боде передаточной функции непрерывного модельного уравнения;
Фиг. 19 является функциональной блок-схемой, показывающей процесс определения параметров системы управления с обратной связью в соответствии со способом ILQ-проектирования в электронном модуле управления, показанном на фиг. 6;
Фиг. 20 является блок-схемой последовательности операций способа, показывающей процесс определения параметров системы управления с обратной связью в соответствии со способом ILQ-проектирования в электронном модуле управления, показанном на фиг. 6;
Фиг. 21 является блок-схемой последовательности операций способа, показывающей процесс определения регулируемой переменной в системе управления с обратной связью в электронном модуле управления;
Фиг. 22 является функциональной блок-схемой, показывающей эквивалентную схему линейного соленоида и схему возбуждения линейного соленоида, которые показаны на фиг. 4, а также электронный модуль управления линейного соленоида, спроектированный посредством системы управления с двумя степенями свободы согласно сравнительному примеру;
Фиг. 23A и 23B показывают диаграмму Боде передаточной функции, представляющей отношение вывода y к возмущениям d в узле контроллера обратной связи, показанном на фиг. 22, и результат моделирования, в котором параметр Tc изменяется;
Фиг. 24A и 24B показывают диаграмму Боде передаточной функции, представляющей отношение вывода y к манипулируемой переменной u в узле контроллера обратной связи, показанном на фиг. 22, и результат моделирования, в котором параметр Tc изменяется;
Фиг. 25A и 25B показывают диаграмму Боде передаточной функции Gyd(s) в узле контроллера обратной связи, показанном на фиг. 6, и результат моделирования;
Фиг. 26 показывает результат моделирования относительно точности статического тока (абсолютной ошибки и относительной ошибки) в узле контроллера обратной связи, показанном на фиг. 6;
Фиг. 27A и 27B показывают диаграмму Боде передаточной функции G(s) в узле контроллера обратной связи, показанном на фиг. 6, и результат моделирования;
Фиг. 28 является видом, поясняющим отклонение и величину коррекции по обратной связи при ступенчатом отклике в узле контроллера обратной связи, показанном на фиг. 6;
Фиг. 29A и 29B показывают результат моделирования отклика на ступенчатое изменение (уменьшение) напряжения аккумулятора в узле контроллера обратной связи, показанном на фиг. 6;
Фиг. 30A и 30B показывают результат моделирования отклика на ступенчатое изменение (увеличение) напряжения аккумулятора в узле контроллера обратной связи, показанном на фиг. 6;
Фиг. 31 является функциональной блок-схемой, показывающей эквивалентную схему линейного соленоида и схему возбуждения линейного соленоида, которые показаны на фиг. 4, и электронный модуль управления для линейного соленоида, который проектируется в соответствии со способом ILQ-проектирования и сконструирован согласно варианту осуществления изобретения, для управления коррекцией параметров;
Фиг. 32 является видом, показывающим взаимосвязь между индуктивностью электрической схемы, через которую протекает управляющий ток, и минимальным значением мгновенного тока;
Фиг. 33 является блок-схемой последовательности операций способа, показывающей процесс для управления коррекцией параметров в электронном модуле управления, показанном на фиг. 31; и
Фиг. 34-36 являются видами, показывающими конструкции основных узлов устройства регулирования фаз газораспределения, включающего в себя электронный модуль управления, сконструированный согласно другому варианту осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления
[0023] В настоящем описании изобретения, имеются описания, связанные с различными матрицами, при этом суффикс "-1" в правой верхней стороне матрицы означает обратную матрицу, которая является обратной по отношению к матрице, суффикс "T" в правой верхней стороне матрицы означает транспонированную матрицу, которая является транспонированной по отношению к матрице, и матрица I означает единичную матрицу.
[0024] Далее подробно описываются некоторые предпочтительные варианты осуществления изобретения со ссылкой на прилагаемые чертежи.
Первый вариант осуществления
[0025] Фиг. 1 является видом, схематично показывающим конструкцию устройства 20 передачи движущей силы транспортного средства, которое должно предоставляться в транспортном средстве и которое включает в себя электронный модуль 170 управления согласно варианту осуществления изобретения. Фиг. 1 также показывает конструкцию устройства 200 гидравлического регулирования фаз газораспределения, включающего в себя электронный модуль 270 управления согласно другому варианту осуществления изобретения. Устройство 20 передачи движущей силы включает в себя преобразователь 12 крутящего момента, соединенный с двигателем 10 транспортного средства, автоматическую трансмиссию 14 транспортного средства, дифференциальный зубчатый механизм 16 и модуль 18 гидравлического управления, выполненный с возможностью управлять действиями переключения передач автоматической трансмиссии 14, в дополнение к электронному модулю 170 управления, выполненному с возможностью управлять модулем 18 гидравлического управления. Движущая сила, выведенная из двигателя 10, передается на ведущие колеса (не показаны) транспортного средства, например, через преобразователь 12 крутящего момента, автоматическую трансмиссию 14, дифференциальный зубчатый механизм 16 и правую и левую оси 22.
[0026] Преобразователь 12 крутящего момента включает в себя рабочее колесо 28 насоса, соединенное с коленчатым валом 26 двигателя 10, рабочее колесо 32 турбины, которое соединяется с входным валом 30 автоматической трансмиссии 14 и в которой движущая сила передается через жидкость под давлением, рабочее колесо 38 статора, соединенное через одностороннюю муфту 34 с кожухом 36 в качестве невращающегося элемента, и блокировочную муфту 40, выполненную с возможностью непосредственно соединять рабочее колесо 28 насоса и рабочее колесо 32 турбины через демпфер (не показан).
[0027] Автоматическая трансмиссия 14 представляет собой многоскоростную трансмиссию, выполненную с возможностью устанавливать четыре позиции передач переднего хода и одну позицию передачи заднего хода. Автоматическая трансмиссия 14 включает в себя, в дополнение к входному валу 30, планетарный зубчатый механизм 44 Равиньо, коронную шестерню 48, которая должна вращаться вместе с коронной шестерней 46 планетарного зубчатого механизма 44, и обратный вал 50, служащий в качестве выходного вала, выполненного с возможностью передавать движущую силу между коронной шестерней 48 и дифференциальным зубчатым механизмом 16.
[0028] Планетарный зубчатый механизм 44 состоит из планетарного передаточного механизма 52 с сателлитами одного типа и планетарного передаточного механизма 54 с сателлитами двух типов, при этом водило 56 и коронная шестерня 46 представляют собой вращательные элементы, общий для планетарных передаточных механизмов 52, 54. Планетарный передаточный механизм 52 включает в себя вращательные элементы в форме солнечной шестерни 58, планетарные шестерни 60, присоединяемые к водилу 56, и коронную шестерню 46. Планетарный передаточный механизм 54 включает в себя вращательные элементы в форме солнечной шестерни 62 и первой и второй сателлиты 64, 66 таким образом, что первой и второй сателлиты 64, 66 соединяются как единое целое друг с другом и удерживаются с возможностью вращения посредством водила 56.
[0029] Некоторые вращательные элементы планетарных передаточных механизмов 52, 54 соединяются как единое целое друг с другом, некоторые вращательные элементы избирательно соединяются друг с другом через три муфты C1, C2, C3, некоторые вращательные элементы избирательно соединяются с кожухом 36 через три тормоза B1, B2, B3, и некоторые вращательные элементы зацепляются с кожухом 36 через две односторонних муфты FC1, FC2 в зависимости от своих направлений вращения. Следует отметить, что устройство 20 передачи движущей силы транспортного средства сконструировано практически симметрично вокруг оси CL1 (соответствующей оси входного вала 30), за исключением преобразователя 12 крутящего момента и обратного вала 50 автоматической трансмиссии 14 таким образом, что нижняя сторона оси CL1 не показана на фиг. 1.
[0030] Каждое из муфт C1, C2, C3 и тормозов B1, B2, B3 в качестве гидравлических фрикционных зацепляющих устройств состоит, например, из многодисковой муфты или ленточного тормоза, включающего в себя одну ленту или две ленты, которые намотаны в соответствующих противоположных направлениях. Каждое из муфт C1, C2, C3 и тормозов B1, B2, B3 управляется посредством модуля 18 гидравлического управления, который работает в соответствии с командами, подаваемыми из электронного модуля 170 управления, таким образом, что оно переводится в зацепленное состоянии, состояние проскальзывания или расцепленное состояние, за счет чего автоматическая трансмиссия 14 может устанавливать четыре позиции передач переднего хода и одну позицию задней шестерни, которые отличаются по передаточному отношению γ (=частота вращения входного вала 30/частота вращения обратного вала 50), как показано на фиг. 2, в котором "первая", "вторая", "третья", "четвертая" представляют соответствующие четыре позиции передач переднего хода, т.е. первую, вторую, третью и четвертую позиции передач, соответственно. Передаточное отношение γ снижается в направлении от первой позиции передачи к четвертой позиции передачи. Дополнительно, на фиг. 2, "P", "R", "N", "D", "2", "L" представляют диапазон парковки, диапазон заднего хода, диапазон нейтрали, диапазон приведения в движение, диапазон второй скорости и диапазон низких скоростей, соответственно, которые избирательно выбираются посредством операции вручную рычага 84 переключения передач. Каждый из диапазона парковки и диапазона нейтрали представляет собой диапазон отсутствия приведения в движение, который должен выбираться, когда транспортное средство не приводится в движение с возможностью двигаться. Диапазон заднего хода представляет собой диапазон приведения в движение, который должен выбираться, когда транспортное средство приводится в движение с возможностью двигаться в обратном направлении. Каждый из диапазона приведения в движение, диапазона второй скорости и диапазона низких скоростей представляет собой диапазон приведения в движение, который должен выбираться, когда транспортное средство приводится в движение с возможностью двигаться в прямом направлении.
[0031] Фиг. 2 является таблицей, поясняющей комбинацию каждой из позиций передач автоматической трансмиссии 14, показанной на фиг. 1, и соответствующих одного или более гидравлических фрикционных зацепляющих устройств автоматической трансмиссии 14, которые должны зацепляться, чтобы устанавливать каждую из позиций передач в автоматической трансмиссии 14. В таблице по фиг. 2, "O" указывает рабочее или зацепленное состояние зацепляющих устройств, и пустота указывает нерабочее или расцепленное состояние зацепляющих устройств. Например, действие переключения передач "вверх" с позиции второй передачи на позицию третьей передачи в диапазоне приведения в движение выполняется за счет принудительного перевода муфты C2 в зацепленное состояние и поддержания зацепленного состояния муфты C1. Дополнительно, действие переключения передач "вниз" из позиции четвертой передачи в позицию третьей передачи выполняется за счет принудительного перевода муфты C1 в зацепленное состояние и за счет принудительного перевода тормоза B1 в расцепленное состояние таким образом, что действие зацепления муфты C1 и действие расцепления тормоза B1 выполняются посредством так называемого "межмуфтового переключения передач", а именно, выполняются в состоянии перекрытия или состоянии отрицательного перекрытия.
[0032] Модуль 18 гидравлического управления включает в себя первый и второй электромагнитные отпирающие/запирающие клапаны SV1, SV2, которые должны управляться с возможностью устанавливать позиции передач в автоматической трансмиссии 14, два линейных соленоидных клапана SLT, SLU и датчик 88 температуры масла. Линейный соленоидный клапан SLT выполнен с возможностью формировать управляющее гидравлическое давление PS [МПа], величина которого соответствует нагрузке на двигатель, т.е. степени TA открытия дросселя [%], определенной посредством датчика 76 степени открытия дросселя. Линейный соленоидный клапан SLU выполнен с возможностью формировать гидравлическое давление для управления, например, рабочим состоянием блокировочной муфты 40, а именно, для установления фрикционного зацепления муфты 40, прекращения фрикционного зацепления и управления величиной проскальзывания муфты 40. Датчик 88 температуры масла служит в качестве устройства определения температуры рабочей жидкости, выполненного с возможностью определять температуру Thoil [°C] рабочей жидкости в модуле 18 гидравлического управления. Следует отметить, что управляющее гидравлическое давление PS соответствует "сигнальному давлению", изложенному в прилагаемой формуле изобретения.
[0033] Электронный модуль 170 управления (ECU) включает в себя так называемый микрокомпьютер, включающий CPU, ROM, RAM и интерфейс ввода-вывода (не показан). Электронный модуль 170 управления выполнен с возможностью управлять гидравлическими фрикционными зацепляющими устройствами (такими как муфты C1, C2, C3 и тормоза B1, B2, B3) и блокировочной муфтой 40, которые включены в устройство 20 передачи движущей силы, посредством инструктирования CPU обрабатывать различные входные сигналы, согласно управляющим программам, сохраненным в ROM, при использовании функции временного хранения данных RAM. Электронный модуль 170 управления соответствует "устройству управления", изложенному в прилагаемой формуле изобретения.
[0034] Электронный модуль 170 управления принимает различные входные сигналы из различных датчиков, предоставленных в транспортном средстве, такие как: выходной сигнал вышеописанного датчика 76 степени открытия дросселя, выполненного с возможностью определять степень TA открытия дросселя во впускной трубе (не показана) двигателя 10; выходной сигнал датчика 78 частоты вращения двигателя, выполненного с возможностью определять частоту Ne вращения двигателя [об/мин]; выходной сигнал датчика 80 частоты вращения входного вала, выполненного с возможностью определять частоту Nin вращения входного вала [об/мин]; выходной сигнал датчика 82 скорости движения, выполненного с возможностью определять частоту Nc вращения обратного вала [об/мин], т.е. скорость Vc движения транспортного средства [км/ч]; выходной сигнал датчика 86 позиции переключения передач, выполненного с возможностью определять рабочую позицию Pst вышеописанного рычага 84 переключения передач, а именно, определять то, в каком одном из диапазона парковки, диапазона заднего хода, диапазона нейтрали, диапазона приведения в движение, диапазона второй скорости и диапазона низких скоростей размещается рычаг 84 переключения передач; выходной сигнал вышеописанного датчика 88 температуры масла, выполненного с возможностью определять температуру Thoil рабочей жидкости (рабочего масла) в модуле 18 гидравлического управления.
[0035] Фиг. 3 является блок-схемой, схематично показывающей основную конструкцию модуля 18 гидравлического управления, выполненного с возможностью управлять автоматической трансмиссией 14, показанной на фиг. 1. Гидравлический насос 90 должен приводиться в действие или работать посредством двигателя 10 таким образом, чтобы всасывать рабочую жидкость, возвращаемую через сетчатый фильтр 92, и подавать рабочую жидкость в устройство 100 формирования давления в магистрали. Устройство 100 формирования давления в магистрали регулирует рабочую жидкость, подаваемую из гидравлического насоса 90, до давления PL в магистрали [МПа], которое соответствует нагрузке на двигатель, и затем выводит отрегулированное давление PL в магистрали в качестве исходного давления каждого из гидравлических фрикционных зацепляющих устройств в форме муфт C1, C2, C3 и тормозов B1, B2, B3 в клапанное устройство 102 переключения передач. Клапан 104 с ручным управлением механически соединяется с рычагом переключения передач 104 и выбирает назначение, в которое должно подаваться давление PL в магистрали таким образом, что выбранное назначение зависит от рабочей позиции Pst рычага 84 переключения передач. Посредством выбора, гидравлическое давление, соответствующее рабочей позиции Pst рычага 84 переключения передач, например, давление в диапазоне заднего хода, давление в диапазоне приведения в движение, давление в диапазоне второй скорости или давление в диапазоне низких скоростей, выводится в клапанное устройство 102 переключения передач. Каждый из первого электромагнитного отпирающего/запирающего клапана SV1 и второго электромагнитного отпирающего/запирающего клапана SV2 выводит выходное давление, которое управляется посредством электронного модуля 170 управления, чтобы выбирать одну из позиций передач, и выходное давление подается в клапанное устройство 102 переключения передач.
[0036] Клапанное устройство 102 переключения передач включает в себя клапан переключения передач 1-2, клапан переключения передач 2-3 и клапан переключения передач 3-4 (не показаны), которые должны переключаться для действия переключения передач, на основе гидравлического давления, соответствующего рабочей позиции Pst рычага 84 переключения передач и подаваемого из клапана 104 с ручным управлением, а также выходного давления, подаваемого из каждого из первого и второго электромагнитного отпирающего/запирающего клапана SV1, SV2. Клапанное устройство 102 переключения передач подает давление зацепления в каждое из соответствующих одного или более гидравлических фрикционных зацепляющих устройств в форме муфт C1, C2, C3 и тормозов B1, B2, B3, в соответствии с надлежащей комбинацией, указываемой на фиг. 2. Муфты C1, C2, C3 и тормоза B1, B2 соединяются с C1-аккумулятором AC1, C2-аккумулятором AC2, C3-аккумулятором AC3, B1-аккумулятором AB1 и B2-аккумулятором AB2, соответственно, таким образом, что увеличение подаваемого давления зацепления, т.е. крутящего момента зацепления в каждом из этих гидравлических фрикционных зацепляющих устройств облегчается.
[0037] Фиг. 4 является принципиальной гидравлической схемой, показывающей устройство 100 формирования давления в магистрали, показанное на фиг. 3. Клапан 110 регулирования давления в магистрали включает в себя: плунжер 112; корпус 114 золотникового клапана, который находится в контакте с плунжером 112 и который является аксиально перемещаемым таким образом, чтобы избирательно разрешать и запрещать сообщение между входным портом 110b и выходным портом 110d; и пружину 118, которая постоянно принудительно подталкивает или смещает корпус 114 золотникового клапана через приемную пластину 116 для пружины в направлении запрета соединения, что заставляет корпус 114 золотникового клапана запрещать сообщение между входным портом 110b и выходным портом 110d. Клапан 110 регулирования давления в магистрали регулирует рабочую жидкость, подаваемую из гидравлического насоса 90 во входной порт 110b, на основе управляющего гидравлического давления PS, подаваемого из линейного соленоидного клапана SLT во входной порт 110a, так что рабочая жидкость регулируется до давления PL в магистрали, которое соответствует нагрузке двигателя 10. Через входной порт 110c, гидравлическое давление, которое подается через входной порт 110b, подается в качестве гидравлического давления обратной связи. Давление PL в магистрали выражается посредством уравнения (7), приведенного ниже, в котором "WREG [Н]" представляет силу смещения пружины 118, "AREG1 [мм2]" представляет площадь приема давления кольцевой формы седла 120 корпуса 114 золотникового клапана, и "AREG2 [мм2]" представляет площадь приема давления плунжера 112, на который действует гидравлическое давление, принудительно перемещающее корпус 114 золотникового клапана в вышеописанном направлении запрета соединения. Уравнение (7) указывает то, что давление PL в магистрали формируется пропорционально управляющему гидравлическому давлению PS. Таким образом, поскольку величина управляющего гидравлического давления PS задается с возможностью соответствовать нагрузке на двигатель, давление PL в магистрали регулируется таким образом, что оно имеет величину, соответствующую нагрузке на двигатель.
PL=(AREG2*PS+WREG)/AREG1........ (7)
[0038] Линейный соленоидный клапан SLT включает в себя: корпус 132 золотникового клапана, выполненный с возможностью избирательно разрешать и запрещать сообщение между входным портом 130a и выходным портом 130b; и пружину 134, которая постоянно принудительно подталкивает или смещает корпус 132 золотникового клапана в направлении разрешения соединения, что заставляет корпус 132 золотникового клапана разрешать сообщение между входным портом 130a и выходным портом 130b. В линейный соленоидный клапан SLT, постоянное гидравлическое давление PSOL [МПа] подается через входной порт 130a, и подаваемое постоянное гидравлическое давление PSOL регулируется до управляющего гидравлического давления PS, соответствующего управляющему току i(t)[А] линейного соленоида SSLT, который управляется посредством электронного модуля 170 управления таким образом, что отрегулированное управляющее гидравлическое давление PS выводится через выходной порт 130b. Управляющее гидравлическое давление PS (или характеристика изменения относительно осевого давления FI) выражается посредством уравнения (8), приведенного ниже, в котором "FI [Н]" представляет осевое давление, в качестве сигнала SD1 возбуждения, соответствующего управляющему току i(t) линейного соленоида SSLT, который принудительно перемещает корпус 132 золотникового клапана в направлении запрета соединения, что заставляет корпус 132 золотникового клапана запрещать сообщение между входным портом 130a и выходным портом 130b, "WSLT [Н]" представляет силу смещения пружины 134, и "ASLT [мм2]" представляет площадь приема давления кольцевой формы седла 136 корпуса 132 золотникового клапана. Жидкостная камера 140 обратной связи, заданная между седлом 136 и седлом 138, поддерживает сообщение с выходным портом 130b через канал 142 для жидкости таким образом, что гидравлическое давление, действующее на площадь приема давления кольцевой формы седла 136, соответствует управляющему гидравлическому давлению PS. Осевое давление FI имеет величину, которая является пропорциональной управляющему току i(t) линейного соленоида SSLT.
PS=WSLT/ASLT-FI/ASLT............. (8)
[0039] Клапан 150 для снижения давления включает в себя корпус 152 золотникового клапана, выполненный с возможностью избирательно разрешать и запрещать сообщение между входным портом 150a и выходным портом 150b; и пружину 154, которая постоянно принудительно подталкивает или смещает корпус 152 золотникового клапана в направлении разрешения соединения, что заставляет корпус 152 золотникового клапана разрешать сообщение между входным портом 150a и выходным портом 150b. Клапан 150 для снижения давления регулирует давление PL в магистрали, подаваемое в него через входной порт 150a, до постоянного гидравлического давления PSOL, и выводит постоянное гидравлическое давление PSOL через выходной порт 150b. Постоянное гидравлическое давление PSOL, выведенное через выходной порт 150b, подается в линейный соленоидный клапан SLT и линейный соленоидный клапан SLU. Во входной порт 150c клапана 150 для снижения давления, гидравлическое давление, выведенное через выходной порт 150b, подается в качестве гидравлического давления обратной связи. Постоянное гидравлическое давление PSOL выражается посредством уравнения (9), приведенного ниже, в котором "AMOD [мм2]" представляет площадь фрагмента приема давления корпуса 152 золотникового клапана, который поддерживает сообщение с входным портом 150c, и "WMOD [Н]" представляет силу смещения пружины 154.
PSOL=WMOD/AMOD............. (9)
[0040] Фиг. 5 является функциональной блок-схемой, показывающей эквивалентную схему линейного соленоида SSLT, показанного на фиг. 4, схему DRV возбуждения линейного соленоида SSLT и электронный модуль 170a управления для линейного соленоида SSLT, который сконструирован согласно компоновке варианта осуществления изобретения. На фиг. 5, фрагмент узла 176a контроллера обратной связи, который должен подвергаться управлению, окружен посредством штрихпунктирной линии с одной точкой, и фрагмент, подвергнутый управлению, имеет конструкцию без проходного элемента. Фиг. 6 является функциональной блок-схемой, показывающей эквивалентную схему линейного соленоида SSLT, показанного на фиг. 4, схему DRV возбуждения линейного соленоида SSLT и электронный модуль 170b управления для линейного соленоида SSLT, который сконструирован согласно другой компоновке варианта осуществления изобретения. На фиг. 6, фрагмент узла 176b контроллера обратной связи, который должен подвергаться управлению, окружен посредством штрихпунктирной линии с одной точкой, и фрагмент, подвергнутый управлению, имеет конструкцию с проходным элементом. Функциональные блок-схемы, показанные на фиг. 5 и 6, являются идентичными друг другу, за исключением узла 176a контроллера обратной связи, показанного на фиг. 5, и узла 176b контроллера обратной связи, показанного на фиг. 6, которые отличаются друг от друга. Следует отметить, что электронный модуль 170a управления и электронный модуль 170b управления представляют собой примеры электронного модуля 170 управления, и система управления с обратной связью электронного модуля 170 управления проектируется в соответствии со способом ILQ-проектирования. Термин "система управления с обратной связью" интерпретируется как означающий конструкцию, выполненную с возможностью выполнять автоматическое управление посредством управления с обратной связью, и представляется посредством, например, блок-схемы управления, показанной в узле 176a контроллера обратной связи на фиг. 5, и блок-схемы управления, показанной в узле 176b контроллера обратной связи на фиг. 6.
[0041] В дальнейшем описываются функции электронного модуля 170 управления, со ссылкой на фиг. 6, который показывает электронный модуль 170b управления. Линейный соленоид SSLT имеет электрические характеристики, которые представляются посредством последовательной RL-схемы из эквивалентной индуктивности Ls [Гн] и эквивалентного сопротивления Rs [Ом]. Следует отметить, что сопротивление во включенном состоянии управляющего транзистора Tr (описан ниже) включено в эквивалентное сопротивление Rs. Схема DRV возбуждения для линейного соленоида SSLT включает в себя: контактный вывод Bt, через который напряжение Pb аккумулятора [В] подается в качестве напряжения источника мощности; управляющий транзистор Tr; сопротивление Rd определения [Ом]; операционный усилитель AMP и аналого-цифровой преобразователь ADC. При включенном управляющем транзисторе Tr, управляющий ток i(t) принудительно протекает через линейный соленоид SSLT посредством напряжения Pb аккумулятора. Сопротивление Rd определения [Ом] последовательно соединяется с линейным соленоидом SSLT таким образом, что управляющий ток i(t), протекающий через линейный соленоид SSLT, принимается в качестве разности напряжений между противоположными концами сопротивления Rd определения. Принимаемая разность напряжений усиливается посредством операционного усилителя AMP и затем преобразуется в оцифрованный сигнал в форме сигнала Iact тока, представляющего фактический управляющий ток i(t). Сигнал Iact тока вводится в электронный модуль 170b управления.
[0042] Электронный модуль 170b управления включает в себя, в дополнение к узлу 176b контроллера обратной связи, узел 172 задания значений команд управления, узел 174 хранения параметров и PWM-узел 178.
[0043] Узел 172 задания значений команд управления задает значение r(t) команды управления током, представляющее целевое значение управления в форме среднего значения управляющего тока i(t) линейного соленоида SSLT, в соответствии с предварительно определенной рабочей картой, на основе сигнала, указывающего степень TA открытия дросселя, сигнала, указывающего частоту Ne вращения двигателя, сигнала, указывающего частоту Nin вращения входного вала, сигнала, указывающего частоту Nc вращения обратного вала, т.е. скорость Vc движения транспортного средства, и сигнала, указывающего рабочую позицию Pst рычага 84 переключения передач. Узел 172 задания значений команд управления выводит значение r(t) команды управления током, которое подается в узел 176b контроллера обратной связи.
[0044] Параметры, которые применяются к системе управления с обратной связью, как описано ниже, сохраняются в узле 174 хранения параметров на стадии формирования узла 174 хранения параметров.
[0045] Узел 176b контроллера обратной связи принудительно подвергает значение r(t) команды управления током, подаваемое из узла 172 задания значений команд управления, управлению с обратной связью с использованием сигнала Iact тока, представляющего фактический управляющий ток i(t), и выводит, в качестве вывода y, значение r(t) команды управления током, подвергнутое управлению с обратной связью. Вывод y выводится в PWM-узел 178. Вывод y представляет собой сигнал, представляющий скважность импульсов в зависимости от среднего управляющего тока i(nτ) в качестве регулируемой переменной, которая описывается ниже.
[0046] PWM-узел 178 формирует сигнал PWM (широтно-импульсной модуляции) на основе вывода y, подаваемого из узла 176b контроллера обратной связи. PWM-узел 178 выводит сформированный PWM-сигнал в электрод затвора управляющего транзистора Tr и выполняет управление включением/выключением управляющего транзистора Tr. Входное напряжение vin(t) [В], введенное в линейный соленоид SSLT через сторону управляющего транзистора Tr, управляется посредством скважности импульсов управления включением/выключением управляющего транзистора Tr, за счет чего управляется управляющий ток i(t) линейного соленоида SLT.
[0047] Относительно указываемых значений различных элементов в настоящем варианте осуществления, например, характеристические значения сопротивлений и индуктивности представляются посредством эквивалентного сопротивления Rs=5,3 [Ом], сопротивления Rd определения=0,5 [Ом] и эквивалентной индуктивности Ls=20*10-3 [H] в номинальных значениях. Номинальное значение представляет собой среднее значение каждого из характеристических значений сопротивлений и индуктивности. Фактическое характеристическое значение (в дальнейшем называемое "фактическим значением") варьируется в зависимости от варьирования изготовления и изменения температуры. Дополнительно, напряжение Pb аккумулятора составляет 15 [В], и частота fd возбуждения PWM-сигнала составляет 1/3,324*103 [Гц]. Следовательно, каждый период τ возбуждения составляет 1/3*10-2 [с] (=1/fd).
[0048] Фиг. 7A и 7B являются видами, поясняющими изменение мгновенного значения управляющего тока i(t), при котором управляющий транзистор Tr, показанный на фиг. 6, подвергается управлению включением/выключением с подачей PWM-сигнала, а также изменение среднего Iave мгновенного значения управляющего тока i(t) в каждый период τ возбуждения. Фиг. 7A и 7B показывают случай, когда PWM-сигнал, скважность импульсов которого составляет 50%, начинает вводиться в управляющий транзистор Tr в момент 0 [с] времени. Управляющий транзистор Tr включен в первой половине (50%) каждого периода τ возбуждения и выключен во второй половине (50%) каждого периода τ возбуждения. Фиг. 7A показывает изменение входного напряжения vin(t) относительно времени, в то время как фиг. 7B показывает изменение управляющего тока i(t) относительно времени. Как показано на фиг. 7A, ввод в 15 [В] и ввод в 0 [В] попеременно выполняются в линейный соленоид SSLT в качестве входного напряжения vin(t) в каждой половине (приблизительно 1,67 [мс]) каждого периода τ возбуждения. На фиг. 7B, одна из двух пунктирных линий представляет собой линию, которая соединяет минимальные значения Imin мгновенного тока, появляющиеся в соответствующие периоды τ возбуждения, и другая из двух пунктирных линий представляет собой линию, которая соединяет максимальные значения Imax мгновенного тока, появляющиеся в соответствующие периоды τ возбуждения. Как показано на фиг. 7B, мгновенное значение управляющего тока i(t), который протекает через линейный соленоид SSLT, флуктуирует между минимальным значением Imin мгновенного тока и максимальным значением Imax мгновенного тока в каждый период τ возбуждения и постепенно увеличивается со схождением каждого из минимального значения Imin мгновенного тока и максимального значения Imax мгновенного тока к постоянному значению после того, как определенная продолжительность истекает. Среднее Iave мгновенного значения управляющего тока i(t) также постепенно увеличивается с увеличениями каждого из минимального значения Imin мгновенного тока и максимального значения Imax мгновенного тока и сходится к постоянному значению после того, как определенная продолжительность истекает. Среднее Iavec представляет собой среднее мгновенного значения управляющего тока i(t) в сходящемся состоянии. Минимальные значения Imin мгновенного тока представляют собой минимум мгновенного значения управляющего тока i(t) в сходящемся состоянии. Следует отметить, что "сходящееся состояние" интерпретируется как означающее состояние, в котором минимальное значение Imin мгновенного тока и среднее Iave мгновенного значения управляющего тока i(t) становятся постоянными или практически постоянными без изменения или существенного изменения.
[0049] Фиг. 8 является функциональной блок-схемой, показывающей процесс 190 проектирования системы управления с обратной связью в показанном электронном модуле 170b управления, показанном на фиг. 6. Как показано на фиг. 8, процесс 190 проектирования включает в себя этапы "аппроксимации 190a электрической схемы", "первого формулирования 190b", "второго формулирования 190c", "извлечения 190d рекуррентного уравнения", "решения 190e рекуррентного уравнения", "линеаризации 190f посредством аппроксимирующего уравнения", "извлечения 190g передаточной функции посредством способа ILQ-проектирования" и "ввода 190h параметров". Каждый из этих этапов может реализовываться либо человеком-оператором, или посредством электронного компьютера, такого как AI (искусственный интеллект). Если этапы реализуются посредством электронного компьютера, электронный компьютер составляет узлы, выполненные с возможностью реализовывать соответствующие этапы. Следует отметить, что показанный электронный модуль 170b управления может интерпретироваться как включающий в себя в себя узел 190a аппроксимации электрической схемы, первый узел 190b формулирования, второй узел 190c формулирования, узел 190d извлечения рекуррентных уравнений, узел 190e решения рекуррентных уравнений, узел 190f линеаризации, узел 190g извлечения передаточных функций и узел 190h ввода параметров, которые выполнены с возможностью реализовывать соответствующие этапы.
[0050] Этап "аппроксимации 190a электрической схемы", который реализуется первым, представляет собой этап аппроксимации последовательной схемы, включающей в себя сопротивление Rz [Ом] и индуктивность L[Гн], к электрической схеме линейного соленоида SSLT, через которую протекает управляющий ток i(t), при этом сопротивление Rz является суммой эквивалентного сопротивления Rs линейного соленоида SSLT и сопротивления Rd определения, и индуктивность L является синонимичной с эквивалентной индуктивностью Ls линейного соленоида SSLT. Этап "первого формулирования 190b", который реализуется после этого, представляет собой этап формулирования уравнения схемы, связанного с мгновенным значением управляющего тока i(t), который протекает в аппроксимированной последовательной схеме. Этап "второго формулирования 190c", который реализуется после этого, представляет собой этап формулирования уравнения, связанного с регулируемой переменной при управлении управляющим током i(t). Этап "извлечения 190d рекуррентного уравнения", который реализуется после этого, представляет собой этап извлечения рекуррентного уравнения из уравнения, связанного с регулируемой переменной. Этап "решения 190e рекуррентного уравнения", который реализуется после этого, представляет собой этап получения решения рекуррентного уравнения посредством решения рекуррентного уравнения. Этап "линеаризации 190f посредством аппроксимирующего уравнения", который реализуется после этого, представляет собой этап линеаризации решенного рекуррентного уравнения посредством аппроксимирующего уравнения. Этап "извлечения 190g передаточной функции посредством способа ILQ-проектирования", который реализуется после этого, представляет собой этап извлечения передаточной функции посредством использования рекуррентного уравнения, которое линеаризовано и решено. "Ввод 190h параметров", который реализуется после этого, представляет собой этап записи или ввода параметров, которые должны применяться к извлеченной передаточной функции, в узел 174 хранения параметров электронного модуля 170 управления. Ниже описывается конкретное содержимое этих этапов.
[0051] Фиг. 9 является блок-схемой последовательности операций способа, показывающей процесс проектирования системы управления с обратной связью в электронном модуле 170b управления, показанном на фиг. 6. Из числа этапов процесса проектирования, каждый из этапов, за исключением этапа S70, начинает реализовываться и реализуется однократно на стадии процесса проектирования. Этап S70 реализуется однократно, когда параметры сохраняются в электронном модуле 170b управления, предоставленном в устройстве 20 передачи движущей силы каждого из транспортных средств.
[0052] На этапе S10, соответствующем этапу "аппроксимации 190a электрической схемы", электрическая схема линейного соленоида SSLT, через которую протекает управляющий ток i(t), аппроксимируется посредством последовательной схемы из сопротивления Rz и индуктивности Ls. После этапа S10 выполняется этап S20.
[0053] На этапе S20, соответствующем этапу "первого формулирования 190b", уравнение (10) в форме дифференциального уравнения формулируется в качестве уравнения схемы, связанного с электрической схемой, которая состоит из линейного соленоида SSLT и схемы DRV возбуждения, и через которую протекает управляющий ток i(t), при этом входное напряжение, введенное в линейный соленоид SSLT через сторону управляющего транзистора Tr, представляется посредством "vin(t)". Следует отметить, что уравнение (10) является идентичным с вышеописанным уравнением (1). После этапа S20 выполняется этап S30.
[0054] На этапе S30, соответствующем этапу "второго формулирования 190c", уравнение (11) формулируется в качестве уравнения, связанного с регулируемой переменной, которая состоит из среднего управляющего тока i(nτ), который представляет собой среднее мгновенного значения управляющего тока i(t) в n-ый период (n: натуральное число), когда управляющий ток i(t) должен управляться. Следует отметить, что уравнение (11) является идентичным с вышеописанным уравнением (2). После этапа S30 выполняется этап S40.

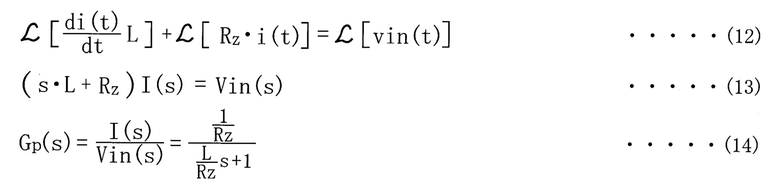
[0055] На этапе S40, соответствующем этапу "извлечения 190d рекуррентного уравнения", уравнение, связанное со средним управляющим током i(nτ) в качестве регулируемой переменной, извлекается в качестве рекуррентного уравнения. Уравнение (12) получается посредством применения преобразования Лапласа к обеим сторонам вышеописанного уравнения (10) и преобразуется в уравнение (13). Дополнительно, передаточная функция Gp(s), которая имеет первичную задержку, представляется посредством уравнения (14).
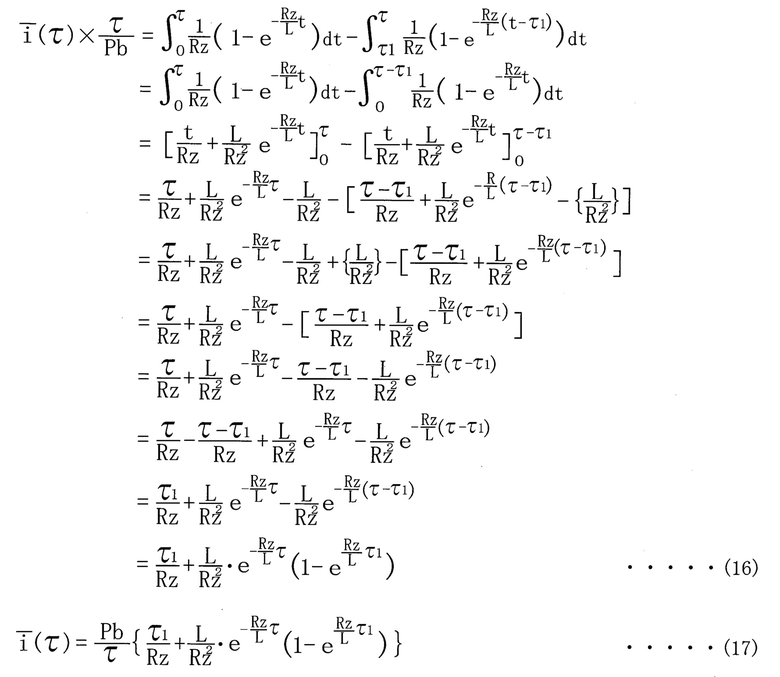
[0056] Уравнение (15), связанное с управляющим током i(t), устанавливается посредством получения ступенчатого отклика управляющего тока i(t) в ответ на ступенчатый ввод входного напряжения vin(t) в момент 0 [с] времени в вышеуказанной передаточной функции Gp(s), при этом "Pb" представляет напряжение аккумулятора, как описано выше.

[0057] Уравнение (16), связанное со средним управляющим током i(τ) в первый период, устанавливается в соответствии с принципом наложения, при этом τ1/τ*100 [%] соответствует скважности импульсов. Уравнение (17), связанное со средним управляющим током i(τ), получается посредством преобразования уравнения (16). Следует отметить, что время τ1 включения [с] представляет продолжительность, в течение которой управляющий транзистор Tr управляется таким образом, что он включен, и время τ2 выключения [с] представляет продолжительность, в течение которой управляющий транзистор Tr управляется таким образом, что он выключен. Время τ2 выключения получается посредством вычитания времени τ1 включения из периода τ возбуждения.
[0058] Аналогично, уравнение (18), связанное со средним управляющим током i(2τ) во второй период, устанавливается. Поскольку уравнение (19) устанавливается, уравнение (20), связанное со средним управляющим током i(2τ), устанавливается. Дополнительно, посредством преобразования уравнений, практически идентичного извлечению среднего управляющего тока i(τ) и среднего управляющего тока i(2τ), уравнение (21) в форме рекуррентного уравнения извлекается. Следует отметить, что уравнение (21) является идентичным с вышеописанным уравнением (3). После этапа S40 выполняется этап S50.
[0059]
[0060]

[0061] На этапе S50, соответствующем этапу "решения 190e рекуррентного уравнения", рекуррентное уравнение решается таким образом, что получается решение, связанное с регулируемой переменной.
[0062] Когда средний управляющий ток an и переменные α, β задаются как соответствующие уравнения (22), (23), (24), вышеописанное уравнение (21) перезаписывается в уравнение (25). Следовательно, средний управляющий ток an выражается посредством уравнения (26) с использованием вычисления, связанного с суммой геометрического ряда.
[0063] Поскольку переменные α, β задаются посредством соответствующих уравнений (23), (24), уравнение (27), связанное с α*β, устанавливается. Дополнительно, поскольку средний управляющий ток a1 вычисляется как средний управляющий ток i(τ) в вышеописанном уравнении (17), вышеописанное уравнение (26) перезаписывается в уравнение (28). Таким образом, решение, связанное с регулируемой переменной в форме среднего управляющего тока an (=среднему управляющему току i(nτ)), получается через уравнение (28).

[0064]
[0065] Фиг. 10 является результатом моделирования, в котором скважность импульсов изменяется с 0% до 50% в момент 0 [с] времени, и показывает временную характеристику в качестве результата моделирования, которое выполняется в соответствии с уравнением (28). На фиг. 10, метки X указывают временную характеристику управляющего тока i(t), который задается в соответствии с уравнением (28), и пунктирная линия указывает сходящееся значение управляющего тока i(t). Сходящееся значение после того, как достаточная продолжительность истекла, а именно, сходящийся управляющий ток a∞ с n→∞ в уравнении (28) представляется так, как указано в уравнении (29). Таким образом, поскольку переменная β, заданная в вышеописанном уравнении (24), составляет β<1, уравнение (30), связанное со сходящимся управляющим током a∞, устанавливается.
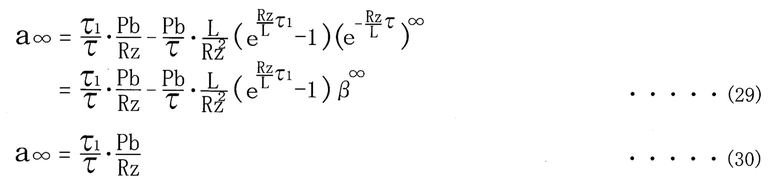
[0066] Таким образом, сходящийся управляющий ток a∞ после того, как достаточная продолжительность истекла, соответствует "скважности импульсов*напряжение аккумулятора Pb/сопротивление Rz", как указано в вышеописанном уравнении (30), так что следует понимать, что сходящийся управляющий ток a∞ имеет линейную взаимосвязь относительно скважности импульсов. После этапа S50 выполняется этап S60.
[0067] На этапе S60, соответствующем этапам "линеаризации 190f посредством аппроксимирующего уравнения" и "извлечения 190g передаточной функции посредством способа ILQ-проектирования", решенное рекуррентное уравнение линеаризуется посредством аппроксимирующего уравнения, и передаточная функция извлекается.
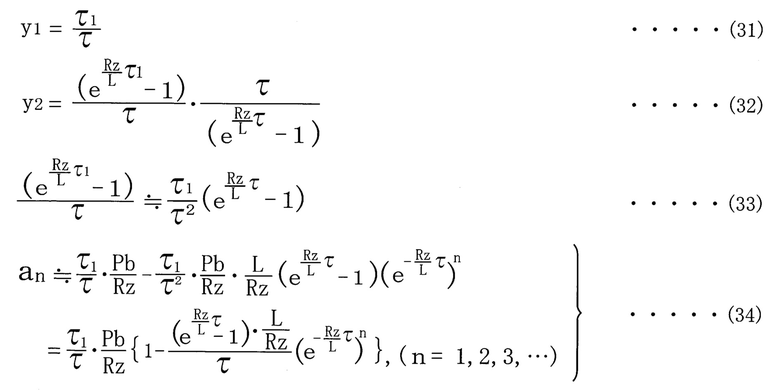
[0068] В вышеописанном уравнении (28) средний управляющий ток an в качестве регулируемой переменной имеет нелинейную взаимосвязь относительно скважности импульсов. Таким образом, рекуррентное уравнение линеаризуется для упрощения проектирования узла 176b контроллера обратной связи. Выводы y1, y2 задаются посредством уравнений (31), (32), соответственно. Фиг. 11 является видом, показывающим взаимосвязь между выводом y1 и временем τ1 включения и взаимосвязь между выводом y2 и временем τ1 включения, при этом вывод y1 имеет линейную взаимосвязь относительно возможных значений времени τ1 включения, в то время как вывод y2 имеет нелинейную взаимосвязь относительно возможных значений времени τ1 включения. Из результата, показанного на фиг. 11, можно считать, что выводы y1, y2 практически равны друг другу таким образом, что можно считать, что левая сторона уравнения (33), которая имеет нелинейную взаимосвязь относительно времени τ1 включения, практически равна правой стороне уравнения (33), которая имеет линейную взаимосвязь относительно времени τ1 включения. Таким образом, посредством применения уравнения (33) к уравнению (28), средний управляющий ток an в качестве регулируемой переменной представляется посредством уравнения (34), которое линеаризуется посредством аппроксимирующего уравнения таким образом, что оно имеет линейную взаимосвязь относительно скважности импульсов. Таким образом, уравнение (33) представляет собой аппроксимирующее уравнение, посредством которого линеаризуется уравнение (28), связанное с регулируемой переменной. Следует отметить, что уравнение (33) является идентичным с вышеописанным уравнением (4).
[0069] В дальнейшем описывается влияние на временную характеристику среднего управляющего тока an в качестве регулируемой переменной, когда среднему управляющему току an придается линейная взаимосвязь относительно скважности импульсов, как представлено посредством уравнения (34). Ступенчатый отклик среднего управляющего тока an в ответ на ступенчатый ввод входного напряжения vin(t) в момент 0 [с] показан на фиг. 12-16, на которых метки X указывают средний управляющий ток an в соответствии с уравнением (28), которое представляет собой нелинейное модельное уравнение, метки в виде черного круга указывают средний управляющий ток an в соответствии с уравнением (34), которое представляет собой линейное модельное уравнение, и пунктирная линия указывает сходящееся значение среднего управляющего тока an. Фиг. 12 является результатом моделирования, в котором скважность импульсов задается равной 5%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения. Фиг. 13 является результатом моделирования, в котором скважность импульсов задается равной 10%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения. Фиг. 14 является результатом моделирования, в котором скважность импульсов задается равной 20%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения. Фиг. 15 является результатом моделирования, в котором скважность импульсов задается равной 30%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения. Фиг. 16 является результатом моделирования, в котором скважность импульсов задается равной 50%, и показывает ступенчатый отклик в качестве результата моделирования в случае нелинейного модельного уравнения, а также в случае линейного модельного уравнения. Как очевидно из фиг. 12-16, уравнение (33) в качестве аппроксимирующего уравнения также предоставляет удовлетворительную аппроксимацию при ступенчатом отклике.
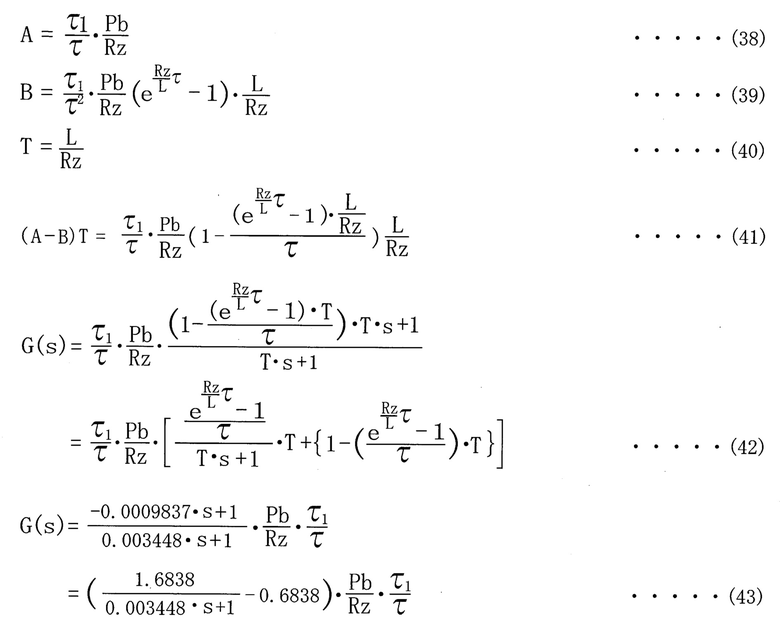
[0070] Из уравнения (34), получается передаточная функция G(s) (непрерывная временная модель) системы. В дальнейшем описывается передаточная функция G1(s) системы, в которой функция времени ступенчатого отклика представляется посредством уравнения (35). Уравнение (36) получается посредством применения преобразования Лапласа к обеим сторонам уравнения (35). Таким образом, передаточная функция G1(s) представляется посредством уравнения (37).

[0071] Посредством сравнения коэффициентов в уравнениях (34), (35), устанавливаются уравнения (38), (39), (40). Коэффициент (A-B)T для "s", составляющий числитель правой стороны уравнения (37), соответствует уравнению (41) таким образом, что передаточная функция G(s) представляется посредством уравнения (42). Передаточная функция G(s) представляется посредством уравнения (43), которое получается посредством применения вышеописанных указываемых значений к уравнению (42).
[0072] Фиг. 17 является результатом моделирования, в котором скважность импульсов задается равной 50%, и показывает ступенчатый отклик в качестве результата моделирования в случае уравнения (42) в качестве непрерывного модельного уравнения, а также в случае уравнения (28) в качестве дискретного модельного уравнения. На фиг. 17, сплошная линия указывает управляющий ток i(t) в соответствии с непрерывным модельным уравнением, метки X указывают управляющий ток i(t) в соответствии с дискретным модельным уравнением, и пунктирная линия указывает сходящееся значение управляющего тока i(t). Значения, вычисленные посредством уравнения (28) в качестве дискретного модельного уравнения, являются идентичными значениям, дискретизированным из ступенчатого отклика, вычисленного посредством уравнения (42) в качестве непрерывного модельного уравнения в соответствующие периоды τ возбуждения.
[0073] Фиг. 18A и 18B показывают диаграмму Боде передаточной функции G(s) непрерывного модельного уравнения. Фиг. 18A показывает частотную характеристику усиления передаточной функции G(s). Фиг. 18B показывает частотную характеристику фазы передаточной функции G(s). Из представления передачи передаточной функции G(s) уравнения (42) следует понимать, что передаточная функция G(s) формируется посредством параллельной комбинации блока первичной задержки и блока усиления, которая не имеет динамики.
[0074] В дальнейшем описывается извлечение модели представления пространства состояний.
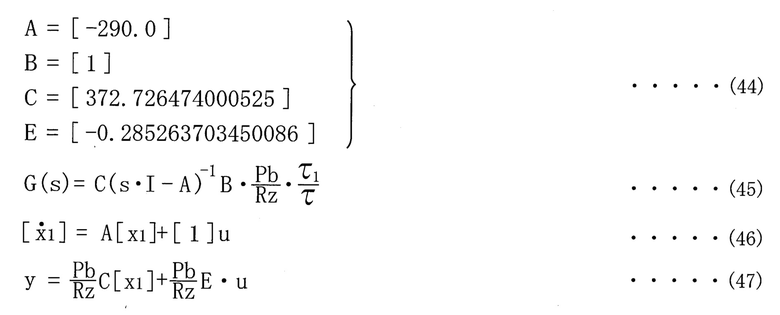
[0075] Передаточная функция G(s), которая представляет собой уравнение (45), представляется посредством представления пространства состояний (канонической формы управляемости) в форме уравнений (44). С учетом усиления в установившемся состоянии ввода и вывода, уравнения (46), (47) с использованием переменной x1 состояния устанавливаются.
[0076] После того, как передаточная функция G(s) извлечена, как описано выше, реализуется этап S70.
[0077] На этапе S70, соответствующем этапу "ввода 190h параметров", параметры системы управления с обратной связью записываются или вводятся в узел 174 хранения параметров электронного модуля 170b управления. Ввод параметров в узел 174 хранения параметров выполняется в процессе изготовления каждого транспортного средства. Ниже описывается процесс определения параметров системы управления с обратной связью. Таким образом, целевое значение управления управляющего тока i(t) линейного соленоида SSLT определяется посредством использования передаточной функции, которая может представляться посредством математического выражения. Процесс, показанный на блок-схеме последовательности операций способа по фиг. 9 завершается с реализацией этапа S70.
[0078] Фиг. 19 является функциональной блок-схемой, показывающей процесс определения параметров системы управления с обратной связью в соответствии со способом ILQ-проектирования в электронном модуле 170b управления, показанном на фиг. 6. Узел 192 ILQ-проектирования используется на этапе "извлечения 190g передаточной функции посредством способа ILQ-проектирования", показанном на фиг. 8. Узел 192 ILQ-проектирования представляет собой систему автоматизированного проектирования (CAD: автоматизированного проектирования) в качестве инструментального средства проектирования для выполнения вычислений в способе ILQ-проектирования (способе обратного линейного квадратичного проектирования) и включает в себя узел 192a определения усиления, узел 192b определения регулярных матриц, узел 192c определения положительно определенных матриц, узел 192d хранения параметров и узел 192e ввода параметров. Способ ILQ-проектирования, который также называется "способом проектирования оптимальных систем управления на основе обратных линейных квадратичных уравнений", представляет собой способ проектирования оптимальных сервосистем, к которому целесообразно применяется результат обратной проблемы относительно проблемы оптимального регулятора (LQ-проблемы) на основе современной теории управления. В способе ILQ-проектирования, решение LQ-проблемы может извлекаться посредством простого назначения полюсов без взвешивания. Способ ILQ-проектирования подробно раскрыт во множестве документов (например, заголовок: Robust Control; авторы: Hidenori Kimura, Takao Fujii, Takehiro Mori; опубликован Korona-sha в 1994 году; см. страницы 141-153).
[0079] Узел 192a определения усиления определяет усиление K в системе управления с обратной связью. Ниже подробно описывается определение усиления K в соответствии со способом ILQ-проектирования. После определения усиления K, узел 192a определения усиления выводит сигнал команды управления в узел 192b определения регулярных матриц. Следует отметить, что усиление K соответствует одному из "параметров", изложенных в прилагаемой формуле изобретения.
[0080] При приеме сигнала команды управления, подаваемого из узла 192a определения усиления, узел 192b определения регулярных матриц определяет регулярную матрицу V в системе управления с обратной связью. Ниже подробно описывается определение регулярной матрицы V в соответствии со способом ILQ-проектирования. После определения регулярной матрицы V, узел 192b определения регулярных матриц выводит сигнал команды управления в узел 192c определения положительно определенных матриц.
[0081] При приеме сигнала команды управления, подаваемого из узла 192b определения регулярных матриц, узел 192c определения положительно определенных матриц определяет положительно определенную матрицу Σ в системе управления с обратной связью. Ниже подробно описывается определение положительно определенной матрицы Σ в соответствии со способом ILQ-проектирования. После определения положительно определенной матрицы Σ, узел 192c определения положительно определенных матриц выводит параметры, такие как усиление K, регулярная матрица V и положительно определенная матрица Σ, на этап "ввода 190h параметров", показанный на фиг. 8. Следует отметить, что положительно определенная матрица Σ соответствует одному из "параметров", изложенных в прилагаемой формуле изобретения.
[0082] Как описано выше, на этапе "ввода 190h параметров", параметры, такие как усиление K, регулярная матрица V и положительно определенная матрица Σ, записываются или вводятся в узел 174 хранения параметров электронного модуля 170b управления.
[0083] В дальнейшем подробно описывается процесс определения параметров системы управления с обратной связью в соответствии со способом ILQ-проектирования. В способе ILQ-проектирования, когда усиление K обратной связи по состоянию предоставляется, обязательно предоставляются необходимые и достаточные условия, требуемые для того, чтобы минимизировать оценочную функцию для некоторых матриц Q, R весовых коэффициентов и параметризации. Таким образом, в структуре усиления, которая является надежно оптимальной для матриц Q, R весовых коэффициентов, как следствие, требуется назначение полюсов системы с замкнутым контуром и правило управления, устанавливающее частотную характеристику передаточной функции.
[0084] В дальнейшем сначала описываются необходимые и достаточные условия правила управления, которое является оптимальным для некоторых матриц Q, R весовых коэффициентов. Нижеприведенное описание приводится посредством использования системных матриц, преобразованных в качестве уравнений (49), (50), которые получаются посредством применения базового преобразования к системным матрицам A, B, которые удовлетворяют условию уравнения (48), без потери общности, в целях улучшения перспектив вычисления. В уравнении (48), "Rn x n" представляет набор матриц действительных чисел порядка n*n и, "Rn x m" представляет набор матриц действительных чисел порядка n*m. В уравнении (49), "R (n-m) x (n-m)" представляет набор матриц действительных чисел порядка (n-m)*(n-m), "R (n-m) x m" представляет набор матриц действительных чисел порядка (n-m)*m,, "Rm x (n-m)" представляет набор матриц действительных чисел порядка m*(n-m). В уравнении (50), "Rm x m" представляет набор матриц действительных чисел порядка m*m.
[0085] Усиление K оптимального регулятора параметризуется в качестве уравнения (51). Дополнительно, матрица R весовых коэффициентов представляется посредством уравнения (52). Следует отметить, что "V" представляет регулярную матрицу, и "Σ" представляет положительно определенную матрицу.
K=В-1ΣV [F1 I]...................... (51)
R=VTΣ-1V............................ (52)
[0086] Во-первых, определяется матрица F1. С точки зрения целевой скорости отклика, вектор gi задается таким образом, что ti является взаимно независимым относительно назначенных полюсов s1,..., sn-m в уравнении (53). Затем матрица F1 получается в уравнении (54).
[0087] Затем, определяется регулярная матрица V. Для упрощения, например, регулярная матрица V состоит из единичной матрицы, поскольку регулярная матрица V не ограничена конкретным образом при условии, что она представляет собой регулярную матрицу.
[0088] Затем, положительно определенная матрица Σ определяется на основе уравнения (55), которое представляет собой линейное матричное неравенство. В частности, матрица, которая не меньше Σmin, выбирается в качестве положительно определенной матрицы Σ, при этом Σmin представляет собой минимальную положительно определенную матрицу, которая обеспечивает достижимость положительно определенной матрицы Y1 (>0) в уравнении (55).
[0089] После этого описывается проблема проектирования оптимальной сервосистемы, которая предоставляет вывод y(t) n-мерной линейной системы с m входами и m выходами, которая представляется посредством уравнений (56), (57) и которая является управляемой и наблюдаемой с возможностью придерживаться значения r(t) команды управления током, которое изменяется ступенчато. Термин "управляемый" означает допускающий перемещение управляемого объекта предпочтительно посредством входного тока. Термин "наблюдаемый" означает допускающий оценку значения переменной состояния в системе посредством только ввода и вывода текущего установленного датчика. Состояние Xe выражается посредством уравнения (58), в котором "r" представляет значение команды управления током, "x" представляет состояние после ввода значения r команды управления током, "u" представляет ввод, "x (с надчеркиванием)" представляет значение в установившемся состоянии для состояния x, и "u (с надчеркиванием)" представляет значение в установившемся состоянии для ввода u. Уравнение (61) представляет расширенную отклоняющую систему ввода v, выражаемого посредством уравнения (59), и вывода ye, выражаемого посредством уравнения (60), в то время как оценочная функция J выражается посредством уравнения (62). Вышеописанная проблема проектирования приводит к проблеме оптимального регулятора, которая минимизирует оценочную функцию J. Оптимальная сервосистема выражается посредством использования уравнения (64) на основе решения v=-Ke*xe и уравнения (63). Блок-схема управления реализована посредством структуры узла 176a контроллера обратной связи, показанного на фиг. 5, описанном выше.
[0090] В проектном решении оптимальной сервосистемы в соответствии со способом ILQ-проектирования, результаты из вышеописанных уравнений (48)-(55) могут применяться практически непосредственно к расширенной системе, состоящей из Ae, Be, Ce. Следовательно, правило Ke оптимального управления для расширенной системы параметризуется в качестве уравнения (65). При применении уравнения (65) к уравнению (64), правило Ke оптимального управления выражается посредством уравнения (66). Блок-схема управления соответствует структуре узла 176b контроллера обратной связи, показанного на фиг. 6, описанном выше. Тем не менее, вычисление упрощается, поскольку каждая системная матрица расширенной системы имеет частично нулевую матрицу.
Ke=V-1ΣV[K I].................... (65)
Ke=V-1ΣV[KF0 KI0].................... (66)
[0091] В дальнейшем описывается процесс определения параметров уравнения (65).
[0092] Во-первых, определяется усиление K. С точки зрения целевой скорости отклика, вектор gi задается таким образом, что ti является взаимно независимым относительно назначенных полюсов s1,..., sn-m в уравнении (67). Затем усиление K получается в уравнении (68).
[0093] Затем, определяется регулярная матрица V. Как описано выше, регулярная матрица V состоит из единичной матрицы, например, для упрощения.
[0094] Затем, положительно определенная матрица Σ определяется на основе уравнения (69), которое представляет собой линейное матричное неравенство. В частности, матрица, которая не меньше Σmin, выбирается в качестве положительно определенной матрицы Σ, при этом Σmin представляет собой минимальную положительно определенную матрицу, которая обеспечивает достижимость положительно определенной матрицы Y (>0) в уравнении (69).
[0095] В дальнейшем описывается вычисление правила Ke оптимального управления относительно расширенной системы (Ae, Be, Ce), выражаемого в уравнении (70). В вычислении, преобразование уравнений выполняется упрощенно с учетом уравнения (71).

[0096] Усиление K получается посредством назначения полюсов, и положительно определенная матрица Σ(σ) задается равной положительно определенной диагональной матрице, которая превышает определенный нижний предел. В настоящем варианте осуществления, назначенный полюс, когда σ→∞, задается равным -1/0,0282*3, в целях инструктирования целевому значению управления придерживаться значения, ослабляемого или сдерживаемого посредством постоянной Tf времени в 28,2 [мс]. Дополнительно, усиления KF, KI (см. фиг. 5), которые эквивалентно преобразуются в интегральную сервосистему, получаются в уравнении (72). Следует отметить, что Ae, Be, Ce выражаются посредством уравнений (73).
[0097] Обеспечивающий оптимальность нижний предел Σmin получается как минимальная положительно определенная матрица Σmin (>0), которая обеспечивает достижимость положительно определенной матрицы Y1 (>0) в уравнении (75), в котором "Ak", "Bv", "Kv" выражаются посредством уравнений (74), и обеспечивающий оптимальность нижний предел Σmin выражается посредством уравнения (76).

[0098] Уравнения (77), (78) устанавливаются так, как следует понимать из фиг. 6, который показывает блок-схему управления узла 176b контроллера обратной связи, который проектируется в соответствии со способом ILQ-проектирования в настоящем варианте осуществления. Уравнение (79) получается посредством применения уравнения (78) к уравнению (77). Тем не менее, уравнение (78) преобразуется в уравнения (81) с учетом уравнения (80). Уравнение (82) получается посредством применения уравнений (81) к уравнению (79).
[0099] Уравнение (82) преобразуется в уравнение (83) посредством решения "Y(s)". Таким образом, передаточная функция Gyd(s) узла 176b контроллера обратной связи согласно настоящему варианту осуществления, который показан на фиг. 6, выражается посредством уравнения (84).
[0100] Фиг. 20 является блок-схемой последовательности операций способа, показывающей процесс определения параметров системы управления с обратной связью в электронном модуле 170b управления, показанном на фиг. 6, в соответствии со способом ILQ-проектирования. Процесс, показанный посредством блок-схемы последовательности операций способа на фиг. 20, начинает выполняться и выполняется однократно на стадии процесса проектирования системы управления с обратной связью.
[0101] Во-первых, на этапе S100, соответствующем функции узла 192a определения усиления, вычисляется и определяется усиление K. Далее, после этапа S100 выполняется этап S110.
[0102] На этапе S110, соответствующем функции узла 192b определения регулярных матриц, вычисляется и определяется регулярная матрица V. Далее, после этапа S110 выполняется этап S120.
[0103] На этапе S120, соответствующем функции узла 192c определения положительно определенных матриц, вычисляется и определяется положительно определенная матрица Σ. Процесс, показанный на блок-схеме последовательности операций способа по фиг. 20, завершается с реализацией этапа S120.
[0104] Узел 176b контроллера обратной связи вычисляет вывод y посредством применения значения, полученного посредством вычитания сигнала Iact тока (который подается из аналого-цифрового преобразователя ADC) из значения r(t) команды управления током (которое подается из узла 172 задания значений команд управления), в систему управления с обратной связью, в которой применяются параметры, такие как усиление K и положительно определенная матрица Σ, которые сохраняются в узле 174 хранения параметров. Затем узел 176b контроллера обратной связи выводит вычисленный вывод y в PWM-узел 178.
[0105] Фиг. 21 является блок-схемой последовательности операций способа, показывающей процесс определения регулируемой переменной в системе управления с обратной связью в электронном модуле 170 управления. Например, изменение рабочего состояния транспортного средства инициирует начало процесса, показанного на блок-схеме последовательности операций способа по фиг. 21.
[0106] Во-первых, на этапе S200, соответствующем функции узла 172 задания значений команд управления, задается значение r(t) команды управления током, представляющее целевое значение управления в форме среднего значения управляющего тока i(t) линейного соленоида SSLT. Далее, после этапа S200 выполняется этап S210.
[0107] На этапе S210, соответствующем функциям узла 174 хранения параметров и узла 176b контроллера обратной связи, отклонение e сигнала Iact тока сигнала Iact тока в качестве наблюдаемого значения вывода y подвергается вычислению, выполняемому посредством системы управления с обратной связью, представленной посредством блок-схемы управления, описанной в узле 176b контроллера обратной связи, показанном на фиг. 6, за счет чего вычисляется вывод y. Далее, после этапа S210 выполняется этап S220.
[0108] На этапе S220, соответствующем функции PWM-узла 178, PWM-сигнал формируется на основе вывода y и выводится в электрод затвора управляющего транзистора Tr. Процесс, показанный на блок-схеме последовательности операций способа по фиг. 21, завершается с реализацией этапа S220.
Сравнительный пример
[0109] Фиг. 22 является функциональной блок-схемой, показывающей эквивалентную схему линейного соленоида SSLT, схему DRV возбуждения линейного соленоида SSLT и электронный модуль 370 управления линейного соленоида SSLT. Электронный модуль 370 управления, который задается согласно традиционному примеру, проектируется посредством системы управления с двумя степенями свободы. Электронный модуль 370 управления согласно сравнительному примеру является практически идентичным электронному модулю 170 управления согласно вышеописанному первому варианту осуществления. Тем не менее, электронный модуль 370 управления и электронный модуль 170 управления отличаются друг от друга в том, что их узел 376 контроллера обратной связи проектируется посредством системы управления с двумя степенями свободы в сравнительном примере, в то время как каждой из узлов 170a, 170b контроллера обратной связи имеет конструкцию, спроектированную посредством способа ILQ-проектирования в первом варианте осуществления. Следовательно, в дальнейшем описываются главным образом отличия, и ссылки с номерами, идентичные ссылкам с номерами, используемым в вышеописанном первом варианте осуществления, используются для того, чтобы идентифицировать функционально соответствующие элементы, при этом их описания опускаются по мере необходимости.
[0110] Электронный модуль 370 управления включает в себя вышеописанные узел 172 задания значений команд управления, узел 174 хранения параметров, PWM-узел 178 и узел 376 контроллера обратной связи.
[0111] В узле 174 хранения параметров, параметры, которые применяются к системе управления с обратной связью, как описано выше, сохраняются на стадии формирования узла 174 хранения параметров. Следует отметить, что "система управления с обратной связью" согласно сравнительному примеру представляется посредством блок-схемы управления, описанной в узле 376 контроллера обратной связи, показанном на фиг. 22.
[0112] Узел 376 контроллера обратной связи принудительно подвергает значение r(t) команды управления током, подаваемое из узла 172 задания значений команд управления, управлению с обратной связью с использованием сигнала Iact тока, представляющего фактический управляющий ток i(t), и выводит, в качестве вывода y, значение r(t) команды управления током, подвергнутое управлению с обратной связью. Вывод y выводится в PWM-узел 178. Вывод y представляет собой сигнал, представляющий скважность импульсов в зависимости от среднего управляющего тока i(nτ) в качестве регулируемой переменной, которая описывается ниже.
[0113] Как описано выше, узел 376 контроллера обратной связи, показанный на фиг. 22, имеет конструкцию управления с обратной связью, которая состоит из системы управления с двумя степенями свободы. В частности, узел 376 контроллера обратной связи состоит из узла прямой связи и узла обратной связи. Узел прямой связи умножает манипулируемую переменную u на коэффициент преобразования (усиление прямой связи Kff=50) для преобразования манипулируемой переменной u в целевую скважность импульсов, при этом манипулируемая переменная u получается посредством применения первичного фильтра нижних частот постоянной времени Tf =28,2 [мс] к значению r(t) команды управления током. Узел обратной связи применяет отклонение e сигнала Iact тока (которое является наблюдаемым значением вывода y) от манипулируемой переменной u, к передаточной функции GC(s)= Kfb/(TC*s+1). Значение, которое является суммой манипулируемых переменных, вычисленных посредством соответствующих узлов прямой связи и обратной связи, составляет конечную манипулируемую переменную (параметр Kfb =60, параметр TC=0,150). Конечная манипулируемая переменная подвергается вычислению передаточной функции Gp(s), за счет чего определяется средний управляющий ток i(nτ) в качестве вывода y, т.е. регулируемая переменная.
[0114] Между прочим, на фиг. 22, "d" представляет возмущения, вызываемые, когда корпус 132 золотникового клапана перемещается посредством гидравлической вибрации и т.п. Возмущения d состоят, например, из противодействующей электродвижущей силы, которая формируется в линейном соленоиде SSLT посредством перемещения железного сердечника в катушке в качестве линейного соленоида SSLT, которое выполняется посредством перемещения корпуса 132 золотникового клапана. Дополнительно, хотя усиление Kff прямой связи задается равным 50, предпочтительно, если усиление Kff прямой связи задается на основе напряжения Pb аккумулятора и сопротивления Rz (которое является суммой эквивалентного сопротивления Rs и сопротивления Rd определения), например, таким образом, что усиление Kff прямой связи задается равным [1/{(Pb)/(Rs+Rd)}], что извлекается из вышеописанного уравнения (30). Считается, что, в узле 376 контроллера обратной связи, может вызываться связанная вибрация относительно вибрации корпуса 132 золотникового клапана (которая вызывается посредством гидравлической вибрации) и вибрации управляющего тока i(t). Следует понимать, что связанная вибрация с большой вероятностью формируется посредством анализа характеристики передаточной функции Gyd(s), которая представляет отношение вывода y к возмущениям d на фиг. 22. Следует отметить, что связанная вибрация представляет собой сложную вибрацию, вызываемую посредством двух или более систем вибрации, которые действуют или оказывают влияние друг на друге. В связанной вибрации, наблюдается перемещение вибрационного состояния между системой вибрации и другой системой вибрации. Связанная вибрация может представлять собой фактор, ухудшающий сходимость и скорость отклика при управлении системой вибрации до определенного целевого значения управления.
[0115] Передаточная функция Gyd(s) узла 376 контроллера обратной связи показана на фиг. 22 выражается посредством уравнения (85). Когда используются значения вышеописанной передаточной функции Gp(s), конкретное числовое решение передаточной функции Gyd(s) выражается посредством уравнения (86).

[0116] В дальнейшем описываются параметры узла 376 контроллера обратной связи и характерное изменение системы. Передаточная функция Gyu(s), представляющая отношение вывода y к манипулируемой переменной u, выражается посредством уравнения (87). Числовое решение передаточной функции Gyu(s) получается посредством использования указываемых значений, и передаточная функция Gyu(s) выражается посредством уравнения (88). Числовое решение после того, как достаточное время истекло, для ступенчатого ввода выражается посредством уравнения (89). Следовательно, поскольку точность статического тока находится под влиянием изменения параметра Kfb (=60) узла 376 контроллера обратной связи, другой параметр Tc узла 376 контроллера обратной связи изменяется. Фиг. 23A и 23B показывают диаграмму Боде передаточной функции Gyd(s), представляющей отношение вывода y к возмущениям d в узле 376 контроллера обратной связи, показанном на фиг. 22, и результат моделирования, в котором параметр Tc изменяется. Фиг. 24A и 24B показывают диаграмму Боде передаточной функции Gyu(s), представляющей отношение вывода y к манипулируемой переменной u в узле 376 контроллера обратной связи, показанном на фиг. 22, и результат моделирования, в котором параметр Tc изменяется. Таким образом, когда связанная вибрация гидравлического давления является проблематичной, скорость отклика ухудшается, но резонанс может не допускаться без снижения точности статического тока, посредством регулирования параметра Tc.
[0117] В дальнейшем в этом документе, узел 176b контроллера обратной связи, спроектированный в соответствии со способом ILQ-проектирования согласно настоящему варианту осуществления, и узел 376 контроллера обратной связи, спроектированный посредством системы управления с двумя степенями свободы согласно сравнительному примеру, сравниваются с точки зрения характеристик.
[0118] Фиг. 25A и 25B показывают диаграмму Боде передаточной функции Gyd(s) и результат моделирования, в котором сопротивление Rz изменяется, при этом сплошные линии представляют результат в узле 176b контроллера обратной связи, выражаемый посредством уравнения (84) согласно настоящему варианту осуществления, в то время как пунктирные линии представляют результат в узле 376 контроллера обратной связи, выражаемый посредством уравнения (86) согласно сравнительному примеру. Фиг. 25A представляет частотную характеристику усиления передаточной функции Gyd(s). Фиг. 25B представляет частотную характеристику фазы передаточной функции Gyd(s).
[0119] Фиг. 25A указывает, в узле 376 контроллера обратной связи согласно сравнительному примеру, что резонансный частотный диапазон изменяется относительно изменения сопротивления Rz, которое вызывается посредством изменения эквивалентного сопротивления Rs, которое составляет часть сопротивления Rz, при этом изменение эквивалентного сопротивления Rs изменяется с изменением температуры линейного соленоида SSLT. В узле 376 контроллера обратной связи согласно сравнительному примеру, имеется резонансный частотный диапазон с усилением, превышающим 0 [дБ], приблизительно при 300 [рад/с]. С другой стороны, в системе с замкнутым контуром узла 176b контроллера обратной связи согласно настоящему варианту осуществления, хотя характеристика усиления изменяется, отсутствует диапазон, в котором усиление превышает 0 [дБ], по всем частотным диапазонам, так что следует понимать, что связанная вибрация практически никогда не возникает. Таким образом, по сравнению с узлом 376 контроллера обратной связи согласно сравнительному примеру, узел 176b контроллера обратной связи согласно настоящему варианту осуществления предоставляет более высокую устойчивость к изменению сопротивления Rz.
[0120] Фиг. 26 показывает результат моделирования относительно точности статического тока (абсолютной ошибки и относительной ошибки) в узле 176b контроллера обратной связи согласно настоящему варианту осуществления. Фиг. 26 также показывает результат моделирования относительно точности статического тока (абсолютной ошибки и относительной ошибки) в узле 376 контроллера обратной связи согласно сравнительному примеру, для ссылки. В узле 376 контроллера обратной связи согласно сравнительному примеру, поскольку управляющий ток i(t) сходится к окрестности целевого значения управления посредством увеличения усиления обратной связи, ошибка увеличивается (коэффициент ошибок является практически постоянным) с увеличением значения r(t) команды управления током, соответствующего целевому значению управления. С другой стороны, в узле 176b контроллера обратной связи согласно настоящему варианту осуществления, который представляет собой сервосистему типа 1, хотя отклонение теоретически равно 0, ошибка приблизительно в 0,1 [мА] наблюдается при любом уровне значения r(t) команды управления током, соответствующего целевому значению управления, вследствие ошибки дискретизации и т.п., при моделировании.
[0121] Фиг. 27A и 27B показывают диаграмму Боде передаточной функции G(s), которая представляет отношение вывода y к значению r команды управления током в узле 176b контроллера обратной связи согласно настоящему варианту осуществления и результат моделирования. Из диаграммы Боде по фиг. 27A и 27B, следует понимать, что система управления согласно настоящему варианту осуществления, которая проектируется посредством способа ILQ-проектирования, демонстрирует характеристику усиления монотонного снижения системы с замкнутым контуром и состоит из характеристики с замкнутым контуром без резонансного режима.
[0122] Фиг. 28 является видом, поясняющим отклонение и величину коррекции по обратной связи при ступенчатом отклике в узле 176b контроллера обратной связи согласно настоящему варианту осуществления. Как показано на фиг. 28, значение r(t) команды управления током, соответствующее целевому значению управления, изменяется ступенчато с 0 на 1,0 в момент 0 [с] времени, до того, как значение r(t) команды управления током ослабляется или сдерживается. С другой стороны, после сдерживания, значение r(t) команды управления током, соответствующее целевому значению управления, сдерживается с постоянной Tf времени, составляющей 28,2 [мс], при этом положительно определенная матрица Σ в качестве параметра для настройки задается равной 300. Как следует понимать из фиг. 28, достаточно высокая скорость отклика на значение r(t) команды управления током (после сдерживания) выполняется без перерегулирования.
[0123] Фиг. 29A и 29B показывают результат моделирования отклика на ступенчатое изменение (уменьшение) напряжения Pb аккумулятора в узле 176b контроллера обратной связи согласно настоящему варианту осуществления. Фиг. 29A и 29B также показывают результат моделирования отклика на ступенчатое изменение (уменьшение) напряжения Pb аккумулятора в узле 376 контроллера обратной связи согласно сравнительному примеру для ссылки. Фиг. 29A показывает изменение напряжения Pb аккумулятора относительно времени. В момент 0 [с] времени, напряжение Pb аккумулятора, которое составляет 15 [В], уменьшается ступенчато до 12 [В]. Фиг. 29B показывает изменение среднего Iave управляющего тока i(t), когда напряжение Pb аккумулятора изменяется ступенчато, как показано на фиг. 29A. Фиг. 30A и 30B показывают результат моделирования отклика на ступенчатое изменение (увеличение) напряжения Pb аккумулятора в узле 176b контроллера обратной связи согласно настоящему варианту осуществления. Фиг. 30A и 30B также показывают результат моделирования отклика на ступенчатое изменение (увеличение) напряжения Pb аккумулятора в узле 376 контроллера обратной связи согласно сравнительному примеру для ссылки. Фиг. 30A показывает изменение напряжения Pb аккумулятора относительно времени. В момент 0 [с] времени, напряжение Pb аккумулятора, которое составляет 12 [В], увеличивается ступенчато до 15 [В]. Фиг. 30B показывает изменение среднего Iave управляющего тока i(t), когда напряжение Pb аккумулятора изменяется ступенчато, как показано на фиг. 30A. Напряжение Pb аккумулятора используется также в качестве напряжения источника мощности для устройства для кондиционирования воздуха (такого как кондиционер) и аудиооборудования (такого как радиооборудование) таким образом, что напряжение Pb аккумулятора может изменяться ступенчато после включения/выключения устройства для кондиционирования воздуха и/или аудиооборудования. Как оценивается из передаточной функции Gyd(s), представляющей отношение вывода y к возмущениям d, управляющий ток i(t) сходится при флуктуации в узле 376 контроллера обратной связи согласно сравнительному примеру, в то время как отклонение плавно уменьшается до нуля в узле 176b контроллера обратной связи согласно настоящему варианту осуществления.
[0124] В электронном модуле 170b управления согласно настоящему варианту осуществления, управление с обратной связью выполняется с помощью системы управления с обратной связью, имеющей параметры, которые определяются в соответствии со способом ILQ-проектирования, при этом усиление передаточной функции Gyd(s), которая представляет отношение вывода y к возмущениям d в системе управления с обратной связью, ниже 0 [дБ] по всем частотным диапазонам. С использованием системы управления с обратной связью, имеющей параметры, определенные в соответствии со способом ILQ-проектирования, можно уменьшать этапы адаптации для адаптации параметров для каждого из различных уровней значения состояния, такого как напряжение источника мощности, которое представляет собой фактор скорости отклика. Дополнительно, при выполнении управления с обратной связью с помощью системы управления с обратной связью, управляющий ток i(t) управляется таким образом, что управляющий ток i(t) сходится к целевому значению управления (соответствующему значению команды управления) при высокой скорости отклика относительно ступенчатого изменения целевого значения управления и ступенчатого изменения напряжения Pb аккумулятора схемы DRV возбуждения линейного соленоида SSLT, без принудительной вибрации системы управления и без вызывания связанной вибрации в линейном соленоиде SSLT.
[0125] В электронном модуле 170b управления согласно настоящему варианту осуществления, линейный соленоид SSLT предоставляется в линейном соленоидном клапане SLT, который выполнен с возможностью подавать управляющее гидравлическое давление PS в клапан 110 регулирования давления в магистрали для управления давлением PL в магистрали, сформированным посредством клапана 110 регулирования давления в магистрали в модуле 18 гидравлического управления автоматической трансмиссии 14 транспортного средства. Вследствие этой компоновки, управляющее гидравлическое давление PS, которое служит для управления давлением PL в магистрали, сформированным посредством клапана 110 регулирования давления в магистрали, предоставленного в автоматической трансмиссии 14 транспортного средства, управляется с возможностью предоставлять высокую скорость отклика без ее вибрации, за счет чего давление PL в магистрали, сформированное посредством клапана 110 регулирования давления в магистрали, также управляется до быстрого отклика без ее вибрации.
[0126] В электронном модуле 170b управления согласно настоящему варианту осуществления, управляющий ток i(t), подаваемый в линейный соленоид SSLT, управляется посредством входного напряжения vin(t), которое получается посредством принудительного управления напряжением Pb аккумулятора путем включения/выключения на основе PWM-сигнала, при этом электрическая схема линейного соленоида SSLT, через которую протекает управляющий ток i(t), аппроксимируется посредством последовательной схемы из сопротивления Rz и индуктивности L, при этом уравнение схемы, связанное с мгновенным значением управляющего тока i(t), протекающего через последовательную схему, формулируется, при этом уравнение, связанное со средним управляющим током i(nτ) в качестве регулируемой переменной для управления управляющим током i(t), формулируется, при этом уравнение, связанное со средним управляющим током i(nτ), извлекается в качестве рекуррентного уравнения, при этом рекуррентное уравнение решается, и решенное рекуррентное уравнение линеаризуется посредством аппроксимирующего уравнения, при этом передаточная функция управления с обратной связью извлекается из линеаризованного уравнения, связанного с регулируемой переменной, и извлеченная передаточная функция используется для того, чтобы определять средний управляющий ток i(nτ). Таким образом, передаточная функция, которая точно линеаризуется и аппроксимируется, извлекается, за счет чего средний управляющий ток i(nτ) в качестве регулируемой переменной определяется посредством вычислений таким образом, что можно уменьшать этапы адаптации для адаптации параметров для каждого из различных уровней значения состояния, такого как напряжение источника мощности, которое представляет собой фактор скорости отклика. Например, можно уменьшать этапы адаптации для адаптации параметров для изменения напряжения Pb аккумулятора, которое соответствует напряжению источника мощности линейного соленоида SSLT, и изменения целевого значения управления управляющего тока i(t) линейного соленоида SSLT.
[0127] В электронном модуле 170b управления согласно настоящему варианту осуществления, уравнение схемы формулируется в качестве уравнения (1), уравнение, связанное с регулируемой переменной, которая представляет собой среднее значение управляющего тока i(t) в n-ый период (n: натуральное число), формулируется в качестве уравнения (2), рекуррентное уравнение формулируется в качестве уравнения (3), и аппроксимирующее уравнение формулируется в качестве уравнения (4), где "t [с]" представляет время, "τ [с]" представляет каждый период возбуждения PWM-сигнала, "τ1 [с]" представляет время включения, которое представляет собой продолжительность, в течение которой управляющий ток (i(t)) подается в линейный соленоид SSLT в каждый период возбуждения, "Pb [В]" представляет напряжение аккумулятора, и "L (Гн)" представляет индуктивность. Таким образом, передаточная функция, которая точно линеаризуется и аппроксимируется, извлекается посредством уравнений (3), (4), за счет чего регулируемая переменная определяется посредством вычислений таким образом, что можно уменьшать этапы адаптации.
Второй вариант осуществления
[0128] Фиг. 31 является функциональной блок-схемой, показывающей эквивалентную схему линейного соленоида SSLT и схему DRV возбуждения линейного соленоида SSLT, которые показаны на фиг. 4, и электронный модуль 170c управления для линейного соленоида SSLT, который проектируется в соответствии со способом ILQ-проектирования и сконструирован согласно этому второму варианту осуществления изобретения для управления коррекцией параметров. Хотя электронный модуль 170c управления согласно второму варианту осуществления является практически идентичным с электронным модулем 170b управления согласно вышеописанному первому варианту осуществления с точки зрения конструкции, электронный модуль 170c управления отличается от электронного модуля 170b управления в том, что параметры системы управления с обратной связью корректируются в зависимости от фактических значений сопротивления Rz и индуктивности L электрической схемы линейного соленоида SSLT, через которую протекает управляющий ток i(t). Следовательно, в дальнейшем описываются главным образом отличия, и ссылки с номерами, идентичные ссылкам с номерами, используемым в вышеописанном первом варианте осуществления, используются для того, чтобы идентифицировать функционально соответствующие элементы, при этом их описания опускаются по мере необходимости. Следует отметить, что эквивалентная схема линейного соленоида SSLT и схема DRV возбуждения линейного соленоида SSLT, которые показаны на фиг. 31, описаны со ссылкой на фиг. 6, и их описания не предоставляются.
[0129] Электронный модуль 170c управления включает в себя, в дополнение к вышеописанным узлу 172 задания значений команд управления, узлу 174 хранения параметров, узлу 176c контроллера обратной связи и PWM-узлу 178, узел 180 измерения, узел 182 вычисления и узел 184 коррекции, которые предоставляются для управления коррекцией параметров. Электронный модуль 170c управления вычисляет фактические значения сопротивления Rz и индуктивность L электрической схемы линейного соленоида SSLT, через которую протекает управляющий ток i(t), и корректирует параметры, связанные с управлением с обратной связью. Электронный модуль 170c управления принимает различные входные сигналы из различных датчиков, предоставленных в транспортном средстве, такие как: вышеописанный выходной сигнал, указывающий степень TA открытия дросселя; выходной сигнал, указывающий частоту Ne вращения двигателя; выходной сигнал, указывающий частоту Nin вращения входного вала; выходной сигнал, указывающий частоту Nc вращения обратного вала, т.е. скорость Vc движения транспортного средства; выходной сигнал, указывающий рабочую позицию Pst рычага 84 переключения передач; выходной сигнал, указывающий температуру Thoil рабочей жидкости в модуле 18 гидравлического управления; и выходной сигнал, который подается из датчика 74 напряжения, выполненного с возможностью определять напряжение Pb аккумулятора на контактном выводе Bt, и который служит признаком напряжения Pb аккумулятора.
[0130] Узел 172 задания значений команд управления задает значение r(t) команды управления током, которое представляет целевое значение управления в форме среднего значения управляющего тока i(t) линейного соленоида SSLT, как описано выше. При управлении коррекцией параметров, узел 172 задания значений команд управления продолжает выводить, в узел 176c контроллера обратной связи, значение r(t) команды управления током в форме определенного значения Rpd команды управления током [А], по меньшей мере, в течение данной продолжительности Tpd [с]. Предпочтительно, если определенное значение Rpd команды управления током составляет значение, превышающее нормальное значение значения r(t) команды управления током таким образом, что сопротивление Rz и индуктивность L могут точно вычисляться. Узел 172 задания значений команд управления выводит, в узел 180 измерения, сигнал TM таймера в качестве сигнала начала вывода, указывающего начало вывода значения r(t) команды управления током. Дополнительно, когда данная продолжительность Tpd [с] истекла после запуска вывода значения Rpd команды управления током, узел 172 задания значений команд управления выводит сигнал TM таймера в качестве выходного стопового сигнала в узел 180 измерения. Следует отметить, что определенное значение Rpd команды управления током представляет собой значение, которое получается посредством экспериментирования или определяется посредством соответствующей теории проектирования таким образом, что управляющий ток i(t) линейного соленоида SSLT сходится, когда истекает данная продолжительность Tpd. Дополнительно, данная продолжительность Tpd представляет собой продолжительность, в течение которой мгновенное значение управляющего тока i(t) сходится в случае определенного значения Rpd команды управления током и получается посредством экспериментирования или определяется посредством соответствующей теории проектирования, из номинальных значений напряжения Pb аккумулятора, сопротивления Rz, индуктивности L и расчетных значений периода τ возбуждения и времени τ1 включения управляющего транзистора Tr таким образом, что управляющий ток i(t) сходится в данной продолжительности Tpd, даже если фактические значения изменяются относительно вышеуказанного номинального значения и спроектированных значений в ожидаемых диапазонах вследствие износа в течение множества лет или при необычном температурном условии.
[0131] Узел 174 хранения параметров, узел 176c контроллера обратной связи и PWM-узел 178 имеют функции, как описано выше со ссылкой на фиг. 6.
[0132] Когда сигнал начала вывода в форме сигнала TM таймера подается из узла 172 задания значений команд управления в узел 180 измерения, узел 180 измерения получает напряжение Pb аккумулятора из датчика 74 напряжения и получает сигнал Iact тока из аналого-цифрового преобразователя ADC. Узел 180 измерения измеряет среднее Iave и минимальные значения Imin мгновенного тока сигнала Iact тока, из полученного сигнала Iact тока. Среднее Iave сигнала Iact тока измеряется, например, посредством вычисления скользящего среднего сигнала Iact тока в течение продолжительности, соответствующей периоду τ [с], который представляет каждый период τ возбуждения PWM-сигнала. Измеренное среднее Iave обновляется. Минимальные значения Imin мгновенного тока сигнала Iact тока измеряются, например, посредством вычисления минимального значения сигнала Iact тока в каждый период τ возбуждения PWM-сигнала. Вычисленные минимальные значения Imin мгновенного тока обновляются. Узел 180 измерения получает время τ1 включения, время τ2 выключения и период τ возбуждения управляющего транзистора Tr, например, из вывода y, вычисленного посредством узла 176c контроллера обратной связи, и значений команд управления, таких как PWM-сигнал, сформированный посредством PWM-узла 178. Когда сигнал прекращения вывода в форме сигнала TM таймера подается из узла 172 задания значений команд управления в узел 180 измерения, узел 180 измерения определяет среднее Iave и минимальные значения Imin мгновенного тока, которые узел 180 измерения измеряют и обновляют, в качестве среднего Iavec и минимального значения мгновенного тока Iminc в сходящемся состоянии, соответственно. После определения среднего Iavec и минимального значения мгновенного тока Iminc в сходящемся состоянии, узел 180 измерения выводит сигнал команды управления в узел 182 вычисления.
[0133] Когда значение команды управления подается из узла 180 измерения в узел 182 вычисления, узел 182 вычисления вычисляет сопротивление Rz в соответствии с вышеописанным уравнением (5) и вычисляет индуктивность L в соответствии с вышеописанным уравнением (6). После вычисления сопротивления Rz и индуктивности L, узел 182 вычисления выводит сигнал команды управления в узел 184 коррекции.
[0134] В дальнейшем описываются причины, по которым сопротивление Rz вычисляется в соответствии с уравнением (5), и индуктивность L вычисляется в соответствии с уравнением (6).
[0135] Сходящийся управляющий ток a∞, который выражается посредством вышеописанного уравнения (30), представляет собой среднее Iavec в сходящемся состоянии таким образом, что уравнение (5) извлекается посредством преобразования уравнения (30) в уравнение относительно сопротивления Rz.
[0136] Уравнение (90) относительно минимального значения мгновенного тока Iminc в сходящемся состоянии устанавливается из вышеописанного уравнения (15) и принципа наложения. Уравнение (90) преобразуется в уравнение (91), которое является идентичным с уравнением (6).
[0137] Между прочим, уравнение (6) не формулируется в уравнение, в котором индуктивность L решается. Фиг. 32 является видом, показывающим взаимосвязь между индуктивностью L электрической схемы, через которую протекает управляющий ток i(t), и минимальным значением мгновенного тока Iminc в сходящемся состоянии. Фиг. 32 показывает взаимосвязь между индуктивностью L и минимальным значением мгновенного тока Iminc, когда индуктивность L находится в диапазоне 0-0,1 [H], при этом указываемые значения представляют собой напряжение аккумулятора Pb=15 [В], сопротивление Rz=5,8 [Ом]{=5,3 [Ом] (эквивалентное сопротивление Rs)+0,5 [Ом] (сопротивление Rd определения)}, период τ возбуждения=1/3*10-2 [с] и время τ2 выключения=τ/2 [с]. Как следует понимать из фиг. 32, минимальное значение мгновенного тока Iminc представляет собой монотонно возрастающую функцию индуктивности L. Следовательно, индуктивность L может получаться посредством вычисления сходимости с использованием итеративного способа, такого как метод Ньютона и способ двоичного поиска.
[0138] Когда выходной сигнал подается из узла 182 вычисления в узел 184 коррекции, узел 184 коррекции корректирует параметры, используемые в узле 176c контроллера обратной связи, в зависимости от вычисленного сопротивления Rz и индуктивности L. Узел 184 коррекции обновляет параметры, сохраненные в узле 174 хранения параметров, посредством их перезаписи в скорректированные параметры таким образом, что управление с обратной связью выполняется на основе скорректированных параметров в узле 176c контроллера обратной связи.
[0139] Фиг. 33 является блок-схемой последовательности операций способа, показывающей процесс для управления коррекцией параметров в электронном модуле 170c управления, показанном на фиг. 31. В настоящем варианте осуществления, этот процесс, показанный на блок-схеме последовательности операций способа по фиг. 33, начинается, например, при проверке, проведенной во время процесса изготовления модуля 18 гидравлического управления, который предоставляется для того, чтобы управлять автоматической трансмиссией 14. Тем не менее, процесс может начинаться, например, когда проверка проводится, когда модуль 18 гидравлического управления, включающий в себя линейный соленоид SSLT, присоединяется к транспортному средству после ремонта, когда полное проезжаемое расстояние транспортного средства превышает определенное расстояние (например, 10,000 км) для проверки износа, либо когда наступает необычное условие, такое как низкая или высокая температура. Поскольку процесс, показанный на блок-схеме последовательности операций способа по фиг. 33, завершается за короткий промежуток времени, к примеру, за 0,1 [с], процесс выполняется в ходе состояния движения транспортного средства, когда полное проезжаемое расстояние транспортного средства превышает определенное расстояние, например, так что движение не затрагивается даже посредством подачи управляющего тока i(t) в линейный соленоид SSLT. Необычное условие определяется, например, через выходной сигнал, который подается из датчика 88 температуры масла, который служит признаком температуры Thoil рабочей жидкости, например, когда двигатель 10 запускается после остановки в течение большой продолжительности в холодной зоне, либо когда линейный соленоид SSLT нагревается до высокой температуры посредством увеличения рабочей жидкости, которое вызывается посредством движения транспортного средства на подъеме в течение большей продолжительности.
[0140] Процесс инициируется с этапом S300, соответствующим функции узла 172 задания значений команд управления, который реализуется, чтобы выводить определенное значение Rpd команды управления током в качестве значения r(t) команды управления током, по меньшей мере, в течение данной продолжительности Tpd. После этапа S300 выполняется этап S310.
[0141] На этапе S310, соответствующем функции узла 180 измерения, напряжение Pb аккумулятора, среднее Iavec в сходящемся состоянии, минимальное значение мгновенного тока Iminc в сходящемся состоянии и период τ возбуждения, время τ1 включения и время τ2 выключения управляющего транзистора Tr получаются или измеряются. После этапа S310 выполняется этап S320.
[0142] На этапе S320, соответствующем функции узла 182 вычисления, сопротивление Rz вычисляется в соответствии с уравнением (5). После этапа S320 выполняется этап S330.
[0143] На этапе S330, соответствующем функции узла 182 вычисления, индуктивность L вычисляется в соответствии с уравнением (6). После этапа S330 выполняется этап S340.
[0144] На этапе S340, соответствующем функции узла 184 коррекции, параметры, используемые в узле 176c контроллера обратной связи, корректируются на основе вычисленного сопротивления Rz и индуктивности L. Процесс, показанный на блок-схеме последовательности операций способа по фиг. 33, завершается с реализацией этапа S340.
[0145] В электронном модуле 170b управления согласно второму варианту осуществления, управляющий ток i(t), подаваемый в линейный соленоид SSLT, управляется посредством напряжения Pb аккумулятора и времени τ1 включения и времени τ2 выключения периода τ возбуждения, при этом сопротивление Rz [Ом] электрической схемы линейного соленоида SSLT, через которую протекает управляющий ток i(t), вычисляется в соответствии с уравнением (5), и индуктивность L[Гн] электрической схемы вычисляется в соответствии с уравнением (6), где "Iavec" представляет среднее значение управляющего тока i(t) в сходящемся состоянии, и "Iminc" представляет минимальное значение мгновенного тока для управляющего тока i(t) в сходящемся состоянии, при этом параметры корректируются в зависимости от сопротивления Rz [Ом] и индуктивности L[Гн], которые вычисляются в соответствии с надлежащими уравнениями (5) и (6). Таким образом, фактические значения сопротивления Rz и индуктивности L даже после износа в течение множества лет после изготовления транспортного средства или даже при необычном условии, таком как низкая или высокая температура, могут вычисляться посредством уравнений (5) и (6). Таким образом, даже в случае, если эквивалентное сопротивление Rs и эквивалентная индуктивность Ls линейного соленоида SSLT и сопротивление Rd определения схемы DRV возбуждения изменены с износом в течение множества лет после изготовления транспортного средства, либо даже в случае, если эквивалентное сопротивление Rs, эквивалентная индуктивность Ls и сопротивление Rd определения значительно отличаются, при необычном условии, таком как низкая или высокая температура, относительно значений при нормальном условии, управление с обратной связью линейного соленоида SSLT может выполняться таким образом, что управляющий ток i(t) управляется с возможностью предоставлять высокую скорость отклика без ее флуктуации, без вызывания связанной вибрации в линейном соленоиде SSLT.
Третий вариант осуществления
[0146] Как описано выше, фиг. 1 также показывает конструкцию устройства 200 гидравлического регулирования фаз газораспределения, включающего в себя электронный модуль 270 управления согласно этому третьему варианту осуществления изобретения. В вышеописанных первом и втором вариантах осуществления, настоящее изобретение применяется к электронному модулю 170 управления линейного соленоида SSLT модуля 18 гидравлического управления, выполненного с возможностью управлять действиями переключения передач автоматической трансмиссии 14. В отличие от первого и второго вариантов осуществления, в третьем варианте осуществления, изобретение применяется к устройству 200 гидравлического регулирования фаз газораспределения. Ссылки с номерами, идентичные ссылкам с номерами, используемым в вышеописанных первом и втором вариантах осуществления, используются для того, чтобы идентифицировать функционально соответствующие элементы, и их описания опускаются по мере необходимости.
[0147] Устройство 200 регулирования фаз газораспределения включает в себя впускной кулачковый вал 204, механизм 202 регулируемых фаз газораспределения (VVT-i: интеллектуальное регулирование фаз газораспределения), модуль 232 гидравлического управления и вышеописанный электронный модуль 270 управления.
[0148] Двигатель 10 включает в себя впускные клапаны 208, которые должны открываться и закрываться в подходящее время с приведением в действие соответствующих кулачков 206 таким образом, что горючая смесь вовлекается в соответствующие цилиндры двигателя 10 в данное время. Каждый из кулачков 206 имеет, в поперечном сечении, в общем, форму яйца, которая задается посредством окружности, имеющей плавно выступающую часть. Вращательное движение каждого кулачка 206 преобразуется в возвратно-поступательное движение соответствующего впускного клапана 208, за счет чего впускной клапан 208 открывается и закрывается. Когда двигатель 10 включает в себя множество цилиндров, впускной кулачковый вал 204 содержит множество кулачков 206. Вращение коленчатого вала 26 передается в звездочку 220, которая удерживается с возможностью вращения на оси CL2, например, через звездочку 24, предоставленную на коленчатом валу 26, и цепь 212 механизма газораспределения. Вращающийся элемент 210 предоставляется для того, чтобы вращаться на частоте вращения, идентичной частоте вращения звездочки 220. Как описано ниже, позиция вращения или фаза вращающегося элемента 210 относительно звездочки 220 является регулируемой. Впускной кулачковый вал 204 и вращающийся элемент 210 крепятся друг к другу и удерживаются с возможностью вращения на оси CL2. Когда двигатель 10 представляет собой четырехтактный двигатель, каждый кулачок 206 вращается однократно, и коленчатый вал 26 вращается двукратно в течение четырех ходов (т.е. хода впуска, хода сжатия, рабочего хода и хода выпуска) двигателя 10 таким образом, что звездочка 220 имеет диаметр, в два раза превышающий диметр звездочки 24.
[0149] Механизм 202 регулируемых фаз газораспределения включает в себя вращающийся элемент 210, прикрепленный к концевому фрагменту впускного кулачкового вала 204, и звездочку 220, с возможностью вращения удерживаемую в концевом фрагменте впускного кулачкового вала 204. Как описано ниже, механизм 202 регулируемых фаз газораспределения выполнен с возможностью регулировать фазу вращения впускного кулачкового вала 204 посредством гидравлического давления, подаваемого из модуля 232 гидравлического управления, за счет чего регулируется время открытия/закрытия впускных клапанов 208 двигателя 10.
[0150] Каждый из фиг. 34-36 является видом, показывающим конструкции основных узлов устройства 200 регулирования фаз газораспределения, включающего в себя электронный модуль 270 управления согласно третьему варианту осуществления. На фиг. 34, показано поперечное сечение каждой звездочки 220 и вращающегося элемента 210 при просмотре в направлении оси CL2, и также показано поперечное сечение каждого из впускного кулачкового вала 204, клапанного блока 238 (описан ниже) и привода 234 (описан ниже) при просмотре в направлении оси CL2. Фиг. 34 показывает случай, когда фаза вращения впускного кулачкового вала 204 регулируется таким образом, что она задерживается или перемещается к фазе запаздывания. Вращающийся элемент 210, который прикрепляется к впускному кулачковому валу 204, включает в себя пару лопастных фрагментов 210a, 210b, которые выступают радиально наружу из внешней периферийной поверхности цилиндрического фрагмента основного корпуса вращающегося элемента 210. Вращающийся элемент 210 принимается в цилиндрическом фрагменте сердечника звездочки 220, в котором задаются жидкостная камера 220a на стороне опережения, жидкостная камера 220b на стороне запаздывания и жидкостные камеры 220c, 220d. Жидкостная камера 220a на стороне опережения и жидкостная камера 220c расположены в соответствующих противоположных сторонах лопастного фрагмента 210a в периферийном направлении звездочки 220 таким образом, что жидкостная камера 220a на стороне опережения расположена на задней стороне жидкостной камеры 220c в направлении Fr вращения звездочки 220. Жидкостная камера 220b на стороне запаздывания и жидкостная камера 220d расположены в соответствующих противоположных сторонах лопастного фрагмента 210b в периферийном направлении таким образом, что жидкостная камера 220b на стороне запаздывания расположена на передней стороне жидкостной камеры 220d в направлении Fr вращения. Каждая из жидкостной камеры 220a на стороне опережения, жидкостной камеры 220b на стороне запаздывания и жидкостных камер 220c, 220d герметизируется посредством герметизирующего элемента таким образом, что гидравлическое давление в ней поддерживается. Гидравлическое давление в каждой из этих камер 220a-220d управляется посредством модуля 232 гидравлического управления, как описано ниже.
[0151] Модуль 232 гидравлического управления включает в себя, в дополнение к вышеописанному приводу 234 и клапанному блоку 238, контрольные клапаны 214, 216, канал 222 подачи жидкости, субканалы 224, 226 подачи жидкости и каналы 228, 230 выпуска жидкости. Привод 234 включает в себя линейный соленоид 234a, прижимной фрагмент 234b, кожух 234c соленоида и фрагмент 234d схемы возбуждения. В приводе 234, управляющий ток i(t) линейного соленоида 234a управляется посредством PWM-сигнала, подаваемого из электронного модуля 270 управления в фрагмент 234d схемы возбуждения, и прижимной фрагмент 234b, расположенный в кожухе 234c соленоида, перемещается, посредством осевого давления на основе сигнала SD2 возбуждения, соответствующего управляющему току i(t), в направлении оси CL2. Клапанный блок 238 включает в себя цилиндрический основной корпус 240, корпус 242 золотникового клапана, пружину 244 и нижний концевой фрагмент 246. Корпус 242 золотникового клапана принимается в сквозном отверстии 240d, которое формируется в цилиндрическом основном корпусе 240 и которое идет в направлении оси CL2 таким образом, что корпус 242 золотникового клапана является перемещаемым в направлении оси CL2. Пружина 244 удерживается в корпусе 242 золотникового клапана посредством пружинного стопорного кольца, которое закрепленно расположено на корпусе 242 золотникового клапана таким образом, что корпус 242 золотникового клапана постоянно принудительно подталкивается или смещается посредством пружины 244 в направлении к приводу 234. Вместе с перемещением прижимного фрагмента 234b привода 234 в направлении оси CL2, корпус 242 золотникового клапана, который располагается в цилиндрическом основном корпусе 240, перемещается в направлении оси CL2. В зависимости от позиции корпуса 242 золотникового клапана относительно цилиндрического основного корпуса 240 в направлении оси CL2, рабочая жидкость избирательно подается и выпускается через канал 222 подачи жидкости, субканалы 224, 226 подачи жидкости и каналы 228, 230 выпуска жидкости. Таким образом, выходное давление PW1, которое должно подаваться из клапанного блока 238 в канал 222 подачи жидкости, выходное давление PW2, которое должно подаваться из клапанного блока 238 в канал 228 выпуска жидкости, и выходное давление PW3, которое должно подаваться из клапанного блока 238 в канал 230 выпуска жидкости, управляются, за счет чего рабочая жидкость подается или выпускается из жидкостной камеры 220a на стороне опережения, жидкостной камеры 220b на стороне запаздывания и жидкостных камер 220c, 220d. Следует отметить, что каждое из выходных давлений PW1, PW2, PW3 соответствует "сигнальному давлению", которое изложено в прилагаемой формуле изобретения и которое служит в качестве высокого давления, посредством которого рабочая жидкость, или в качестве давления на выпуске, посредством которого рабочая жидкость выпускается.
[0152] Аналогично электронному модулю 170 управления согласно вышеописанному первому варианту осуществления, электронный модуль 270 управления включает в себя так называемый микрокомпьютер и выполнен с возможностью управлять устройством 200 регулирования фаз газораспределения, посредством инструктирования CPU обрабатывать различные входные сигналы, согласно управляющим программам, сохраненным в ROM, при использовании функции временного хранения данных RAM. Электронный модуль 270 управления соответствует "устройству управления", изложенному в прилагаемой формуле изобретения.
[0153] Электронный модуль 270 управления принимает выходной сигнал, который подается из датчика 70 позиции коленчатого вала, выполненного с возможностью определять угол вращения коленчатого вала 26, и который служит признаком угла Pcra вращения коленчатого вала [рад], соответствующего углу вращения коленчатого вала 26, и выходной сигнал, который подается из датчика 72 позиции кулачка, выполненного с возможностью определять угол вращения впускного кулачкового вала 204, и который служит признаком угла Pcam вращения кулачка [рад], соответствующего углу вращения впускного кулачкового вала 204. Электронный модуль 270 управления выводит PWM-сигнал в фрагмент 234d схемы возбуждения привода 234, как описано выше.
[0154] Электронный модуль 270 управления имеет функции управления, практически идентичные функциям управления электронного модуля 170b управления согласно вышеописанному первому варианту осуществления, который описывается со ссылкой на функциональную блок-схему по фиг. 6. Линейный соленоид 234a привода 234 имеет эквивалентную схему, которая является идентичной эквивалентной схеме линейного соленоида SSLT в первом варианте осуществления и которая выражается посредством последовательной RL-схемы, состоящей из эквивалентной индуктивности Ls и эквивалентного сопротивления Rs. Фрагмент 234d схемы возбуждения привода 234 имеет эквивалентную схему, которая является идентичной со схемой DRV возбуждения в первом варианте осуществления и которая состоит из контактного вывода Bt (в который подается напряжение Pb аккумулятора), управляющего транзистора Tr, сопротивления Rd определения, операционного усилителя AMP и аналого-цифрового преобразователя ADC.
[0155] На фиг. 34, стрелка Fr указывает направление вращения звездочки 220, которое должно выполняться, когда вращение коленчатого вала 26 передается в звездочку 220 через звездочку 24 и цепь 212 механизма газораспределения. Управляющий ток i(t), протекающий через линейный соленоид 234a, управляется посредством PWM-сигнала, выведенного из электронного модуля 270 управления, за счет чего прижимной фрагмент 234b привода 234 перемещается против силы смещения пружины 244 таким образом, что он позиционируется в такой позиции, которая приводит выпускное отверстие 242a в сообщение с отверстием 240c для подачи жидкости. В этом случае, рабочая жидкость из жидкостной камеры 220a на стороне опережения звездочки 220 принудительно протекает в направлении, указываемом посредством стрелок через субканал 224 подачи жидкости, канал 228 выпуска жидкости, отверстие 240c для подачи жидкости и выпускное отверстие 242a, и выпускается в канал 242b для жидкости, который формируется в корпусе 242 золотникового клапана и который идет в направлении направления оси CL2.
[0156] Таким образом, за счет принудительного подталкивания звездочки 220 таким образом, что она вращается в направлении стрелки Fr, рабочая жидкость в жидкостной камере 220a на стороне опережения выпускается посредством лопастного фрагмента 210a, и рабочая жидкость в жидкостной камере 220d принудительно протекает в жидкостную камеру 220c через канавку 210c, за счет этого заставляя вращающийся элемент 210 вращаться в направлении, противоположном направлению стрелки Fr. Следовательно, фаза вращения впускного кулачкового вала 204, соединенного с вращающимся элементом 210, задерживается или перемещается к фазе запаздывания относительно фазы вращения звездочки 220, которая механически ассоциирована с коленчатым валом 26, за счет чего время открытия/закрытия впускных клапанов 208 задерживается или перемещается к фазе запаздывания.
[0157] Фиг. 35 является видом, показывающим конструкцию основных узлов устройства 200 регулирования фаз газораспределения, включающего в себя электронный модуль 270 управления, в случае, в котором фаза вращения впускного кулачкового вала 204 регулируется с возможностью перемещаться к фазе опережения. Подача PWM-сигнала из электронного модуля 270 управления в фрагмент 234d схемы возбуждения прекращается, за счет чего привод 234 управляется таким образом, что управляющий ток i(t) не подается в линейный соленоид 234a. При отсутствии подачи управляющего тока i(t) в линейный соленоид 234a, корпус 242 золотникового клапана, расположенный в цилиндрическом основном корпусе 240, перемещается, посредством силы смещения пружины 244, в направлении направления оси CL2 в клапанном блоке 238. Таким образом, корпус 242 золотникового клапана позиционируется в такой позиции, которая приводит выпускное отверстие 242a корпуса 242 золотникового клапана в сообщение с отверстием 240a для подачи жидкости. В этом случае, рабочая жидкость из жидкостной камеры 220b на стороне запаздывания звездочки 220 принудительно протекает в направлении, указываемом посредством стрелок через субканал 226 подачи жидкости, канал 230 выпуска жидкости, отверстие 240a для подачи жидкости и выпускное отверстие 242a, и выпускается в канал 242b для жидкости.
[0158] Таким образом, за счет принудительного подталкивания звездочки 220 таким образом, что она вращается в направлении, противоположном направлению стрелки Fr, рабочая жидкость в жидкостной камере 220b на стороне запаздывания выпускается посредством лопастного фрагмента 210b, и рабочая жидкость в жидкостной камере 220c принудительно протекает в жидкостную камеру 220d через канавку 210c, за счет этого заставляя вращающийся элемент 210 вращаться в направлении стрелки Fr. Следовательно, фаза вращения впускного кулачкового вала 204, соединенного с вращающимся элементом 210, перемещается к фазе опережения относительно фазы вращения звездочки 220, которая механически ассоциирована с коленчатым валом 26, за счет чего время открытия/закрытия впускных клапанов 208 перемещается к фазе опережения.
[0159] Фиг. 36 является видом, показывающим конструкцию основных узлов устройства 200 регулирования фаз газораспределения, включающего в себя электронный модуль 270 управления, в случае, в котором фаза вращения впускного кулачкового вала 204 регулируется с возможностью поддерживаться. Когда угол Pcam вращения кулачка становится целевым углом, корпус 242 золотникового клапана перемещается посредством перемещения прижимного фрагмента 234b привода 234, которое выполняется посредством PWM-сигнала, выведенного в фрагмент 234d схемы возбуждения из электронного модуля 270 управления, и корпус 242 золотникового клапана позиционируется в такой позиции, которая приводит выпускное отверстие 242a корпуса 242 золотникового клапана в сообщение с отверстием 240b для подачи жидкости, при изоляции выпускного отверстия 242a от отверстий 240a, 240c для подачи жидкости таким образом, что рабочая жидкость не выпускается из каналов 228, 230 выпуска жидкости в канал 242b для жидкости. В этом случае, рабочая жидкость в жидкостной камере 220a на стороне опережения и рабочая жидкость в жидкостной камере 220b на стороне запаздывания не выпускаются, поскольку отверстия 240a, 240c для подачи жидкости закрыты посредством корпуса 242 золотникового клапана, в то время как жидкостные камеры 220c, 220d заполняются рабочей жидкостью, которая подается в жидкостные камеры 220c, 220d через канал 222 подачи жидкости. Дополнительно, рабочая жидкость в канале 222 подачи жидкости подается в жидкостную камеру 220a на стороне опережения и жидкостную камеру 220b на стороне запаздывания через контрольные клапаны 214, 216 и субканал 224, 226 подачи жидкости. Следовательно, фаза вращения впускного кулачкового вала 204 соединена с вращающимся элементом 210 относительно фазы вращения звездочки 220, которая механически ассоциирована с коленчатым валом 26, за счет чего определяется время открытия/закрытия впускных клапанов 208. Следует отметить, что рабочая жидкость подается в канал 222 подачи жидкости из гидравлического насоса 90 через отверстие 258 для подачи жидкости, жидкостную камеру 256, которая предоставляется в концевом фрагменте впускного кулачкового вала 204, отверстие 262 для подачи жидкости, контрольный клапан 252, канал 260 для жидкости и вышеописанное отверстие 240b для подачи жидкости.
[0160] Управление с обратной связью, которое выполняется посредством электронного модуля 270 управления для фрагмента 234d схемы возбуждения, является практически идентичным управлению с обратной связью, выполняемому посредством электронного модуля 170b управления для схемы DRV возбуждения в вышеописанном первом варианте осуществления. Таким образом, PWM-сигнал, соответствующий значению r(t) команды управления током, подается из электронного модуля 270 управления в фрагмент 234d схемы возбуждения, и сигнал Iact тока, представляющий управляющий ток i(t), фактически подаваемый из фрагмента 234d схемы возбуждения в линейный соленоид 234a, принимается посредством электронного модуля 270 управления. Электронный модуль 270 управления выполняет управление с обратной связью с использованием системы управления с обратной связью, имеющей параметры, которые определяются способом, практически идентичным способу в вышеописанном первом варианте осуществления.
[0161] В электронном модуле 270 управления согласно третьему варианту осуществления, линейный соленоид 234a предоставляется в приводе 234, при этом в модуле 232 гидравлического управления для управления механизмом 202 регулируемых фаз газораспределения, выполненным с возможностью регулировать время открытия/закрытия впускных клапанов 208 двигателя 10, клапанный блок 238 модуля 232 гидравлического управления принудительно подает, в механизм 202 регулируемых фаз газораспределения, выходные давления PW1, PW2, PW3, каждое из которых соответствует сигнальному давлению, величина которого соответствует управляющему току i(t), который определяется через управление с обратной связью, для формирования гидравлического давления для регулирования времени открытия/закрытия. Вследствие этой компоновки, сигнальное давление, которое подается из клапанного блока 238 в механизм 202 регулируемых фаз газораспределения, может управляться с возможностью предоставлять высокую скорость отклика без ее флуктуации, за счет чего регулирование времени открытия/закрытия посредством механизма 202 регулируемых фаз газораспределения также может управляться с возможностью предоставлять высокую скорость отклика без ее вибрации.
[0162] Хотя выше подробно описываются предпочтительные варианты осуществления этого изобретения в отношении чертежей, следует понимать, что изобретение может осуществляться иным образом.
[0163] В вышеописанном втором варианте осуществления, параметры системы управления с обратной связью корректируются только на основе вычисленного сопротивления Rz и индуктивности L электрической схемы, через которую протекает управляющий ток i(t). Например, параметры системы управления с обратной связью могут корректироваться на основе вычисленных значений сопротивления Rz и индуктивности L, а также номинальных значений сопротивления Rz и индуктивности L. В этой модификации, взвешивание может предоставляться для номинального значения и вычисленного значения, например, таким образом, что весовой коэффициент в 7:3 предоставляется для номинального значения и вычисленного значения, за счет чего параметры системы управления с обратной связью корректируются на основе значения, соответствующего (0,7*номинальное значение+0,3*вычисленное значение) для сопротивления Rz, и значения, соответствующего (0,7*номинальное значение+0,3*вычисленное значение) для индуктивности L. В этой модификации, даже если вычисленное значение ошибочно отклоняется от фактического значения, номинальное значение, которому предоставляется более высокое взвешивание, отражается в основном на коррекции параметров таким образом, что управление с обратной связью удовлетворительно выполняется. Дополнительно, в электронном модуле 270 управления согласно вышеописанному третьему варианту осуществления, также может проводиться коррекция параметров системы управления с обратной связью на основе фактических значений сопротивления Rz и индуктивности L электрической схемы, через которую протекает управляющий ток i(t), аналогично второму варианту осуществления.
[0164] В вышеописанных первом и втором вариантах осуществления, линейный соленоид SSLT, который управляется в соответствии с принципом настоящего изобретения, предоставляется для линейного соленоидного клапана SLT, выполненного с возможностью подавать управляющее гидравлическое давление PS в качестве сигнального давления в клапан 110 регулирования давления в магистрали для управления давлением PL в магистрали, сформированным посредством клапана 110 регулирования давления в магистрали в модуле 18 гидравлического управления автоматической трансмиссии 14. Тем не менее, линейный соленоид, который должен управляться посредством принципа настоящего изобретения, например, может представлять собой линейный соленоид, предоставленный для каждого из первого электромагнитного отпирающего/запирающего клапана SV1 и второго электромагнитного отпирающего/запирающего клапана SV2, которые представляют собой линейные соленоидные клапаны, сконфигурированные с возможностью управлять муфтами C1, C2, C3, и тормозами B1, B2, B3 модуля 18 гидравлического управления в качестве гидравлических фрикционных зацепляющих устройств, работающих с возможностью устанавливать позиции передач в автоматической трансмиссии 14. Например, каждый из первого и второго электромагнитных отпирающих/запирающих клапанов SV1, SV2 имеет конструкцию, практически идентичную конструкции линейного соленоидного клапана SLT в вышеописанном первом варианте осуществления таким образом, что выходные давления PV1, PV2, величины которых соответствуют управляющему току i(t), протекающему через линейный соленоид, предоставленный для каждого из первого и второго электромагнитных отпирающих/запирающих клапанов SV1, SV2, выводятся из соответствующих первого и второго электромагнитных отпирающих/запирающих клапанов SV1, SV2. В этой модификации, каждое из выходных давлений PV1, PV2 соответствующих первого и второго электромагнитных отпирающих/запирающих клапанов SV1, SV2 соответствует "сигнальному давлению", изложенному в прилагаемой формуле изобретения. В этой модификации, выходные давления PV1, PV2 первого и второго электромагнитных отпирающих/запирающих клапанов SV1, SV2 управляются с возможностью предоставлять высокую скорость отклика без ее вибрации, за счет чего действия зацепления и расцепления каждого из гидравлических фрикционных зацепляющих устройств также могут управляться с возможностью предоставлять высокую скорость отклика без ее вибрации.
[0165] В вышеописанном третьем варианте осуществления, время открытия/закрытия впускных клапанов 208 управляется посредством управления линейным соленоидом 234a посредством электронного модуля 270 управления. Тем не менее, вместо или в дополнение к впускным клапанам 208, могут управляться выпускные клапаны двигателя 10.
[0166] В вышеописанных вариантах осуществления, способ ILQ-проектирования используется для уменьшения этапов адаптации, уменьшения связанной вибрации и установления высокой скорости отклика. Тем не менее, при условии, что высокий приоритет не обязательно отдается установлению высокой скорости отклика, узел контроллера обратной связи может проектироваться в соответствии, вместо способа ILQ-проектирования, с другим способом проектирования или теорией управления, таким как способ согласно вышеописанному сравнительному примеру, способ LQ-проектирования (способ линейного квадратичного проектирования), контроллер на основе SPR (строго положительных действительных чисел), управление со скользящим режимом и PID-управление. Кроме того, в этом случае, передаточная функция, которая точно линеаризуется и аппроксимируется, извлекается таким образом, что можно уменьшать этапы адаптации для адаптации параметров для каждого из различных уровней значения состояния, такого как напряжение источника мощности, которое представляет собой фактор скорости отклика.
[0167] Следует понимать, что варианты осуществления, описанные выше, приводятся в только качестве иллюстрации, и что настоящее изобретение может быть осуществлено с различными модификациями и улучшениями, которые могут быть очевидными для специалистов в данной области техники.
Перечень ссылочных позиций
[0168] 10 - двигатель транспортного средства
14 - автоматическая трансмиссия транспортного средства
18 - модуль гидравлического управления
110 - клапан регулирования давления в магистрали
170-170a, 170b, 170c - электронный модуль управления (устройство управления)
202 - механизм регулируемых фаз газораспределения
208 - впускной клапан (клапан)
232 - модуль гидравлического управления
234 - привод
234a - линейный соленоид
270 - электронный модуль управления (устройство управления)
B1-B3 - тормоза (гидравлические фрикционные зацепляющие устройства)
C1-C3 - муфты (гидравлические фрикционные зацепляющие устройства)
d - возмущения
Gyd(s) -передаточная функция
i(t) -управляющий ток
i(nτ), Iave, Iavec - средний управляющий ток (регулируемая переменная)
Iminc - минимальные значения мгновенного тока
K - усиление (параметр)
L - индуктивность
Pb - напряжение аккумулятора
PL - давление в магистрали
PS - управляющее гидравлическое давление (сигнальное давление)
PV1, PV2 - выходное давление (сигнальное давление)
PW1, PW2, PW3 - выходное давление (сигнальное давление)
Rz - сопротивление
SLT, SV1, SV2 - линейный соленоидный клапан
SSLT - линейный соленоид
t - время
vin(t) -входное напряжение
y - вывод
Σ - положительно определенная матрица (параметр)
τ - период возбуждения
τ1 - время включения
τ2 - время выключения

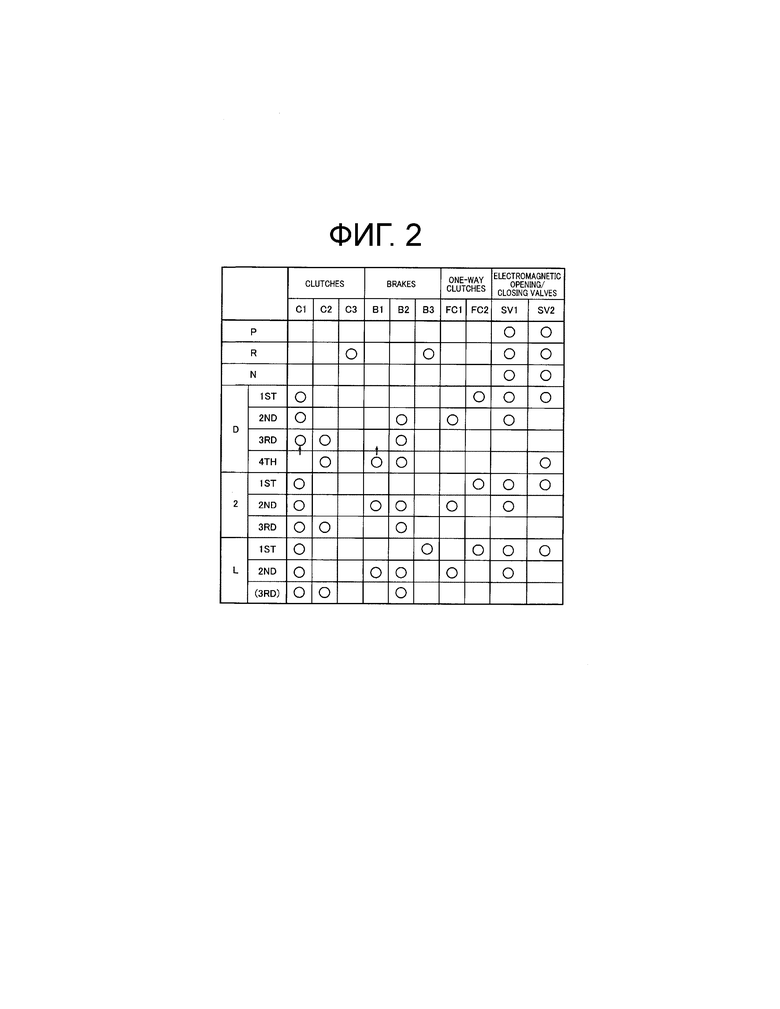
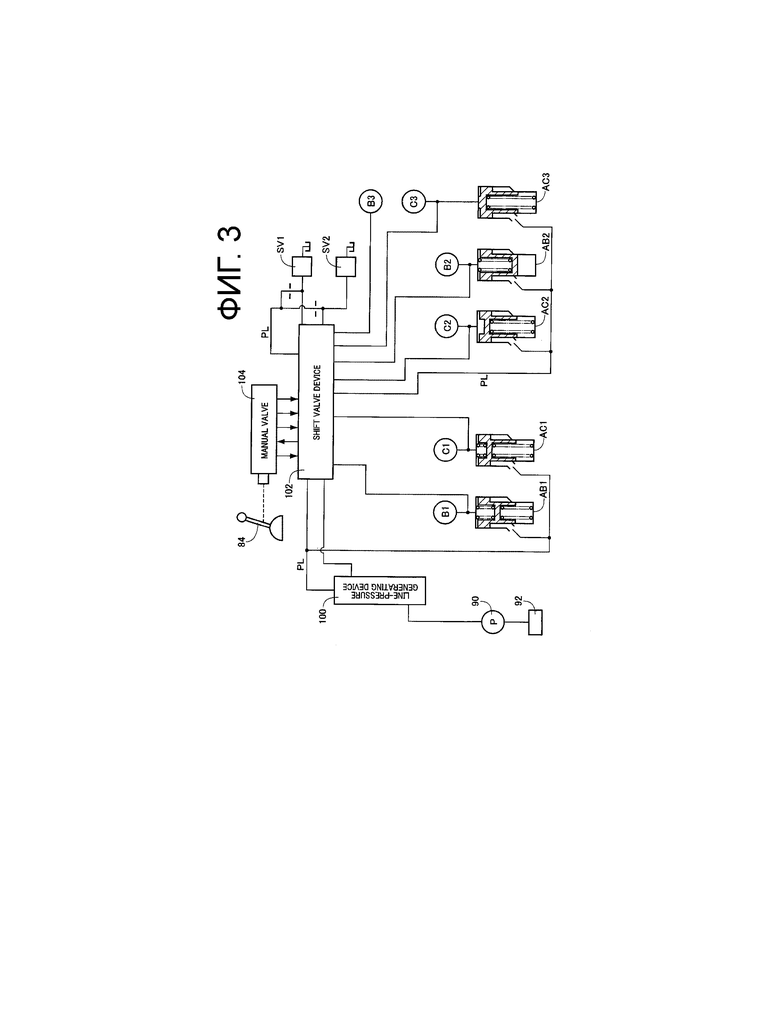
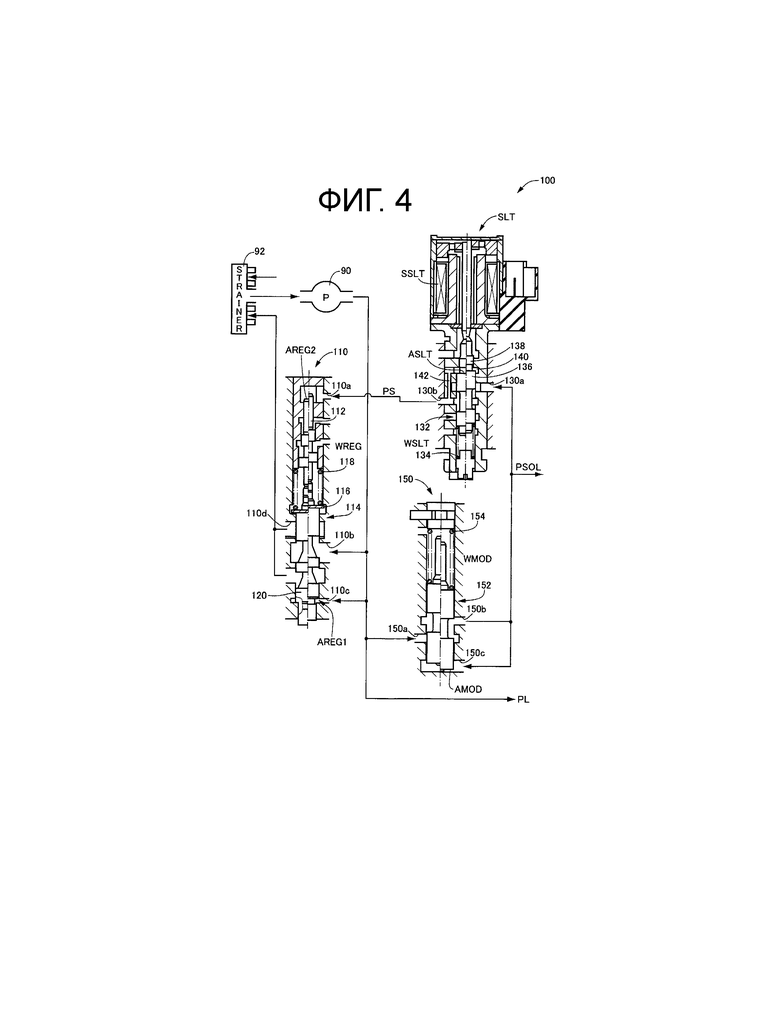
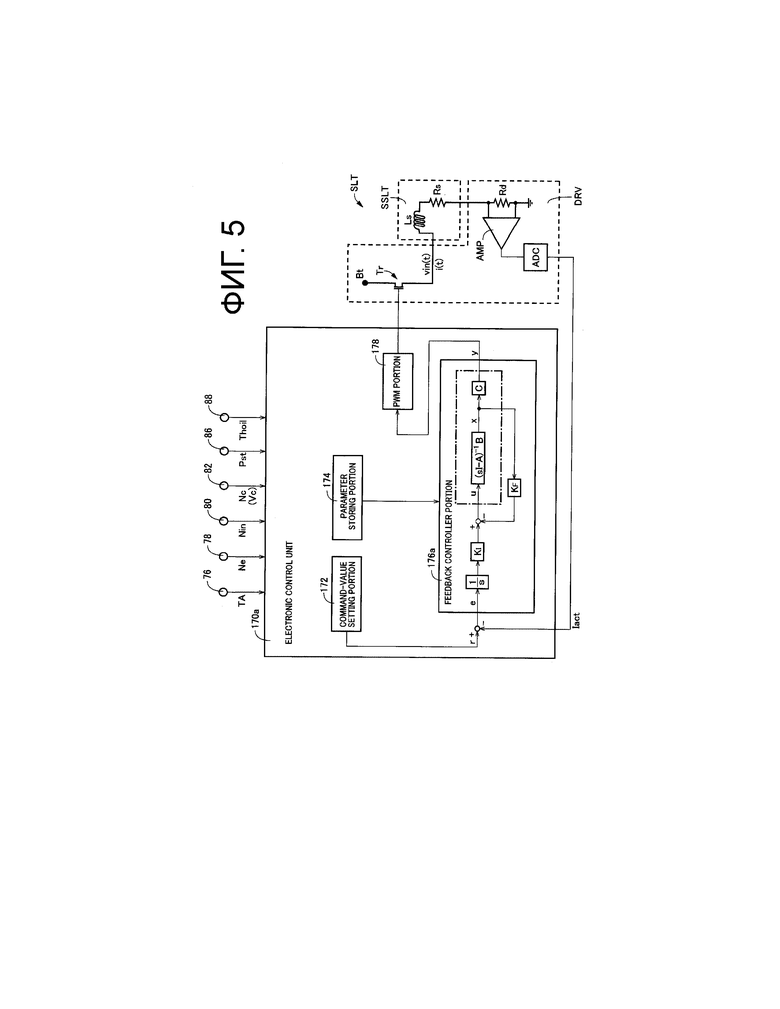
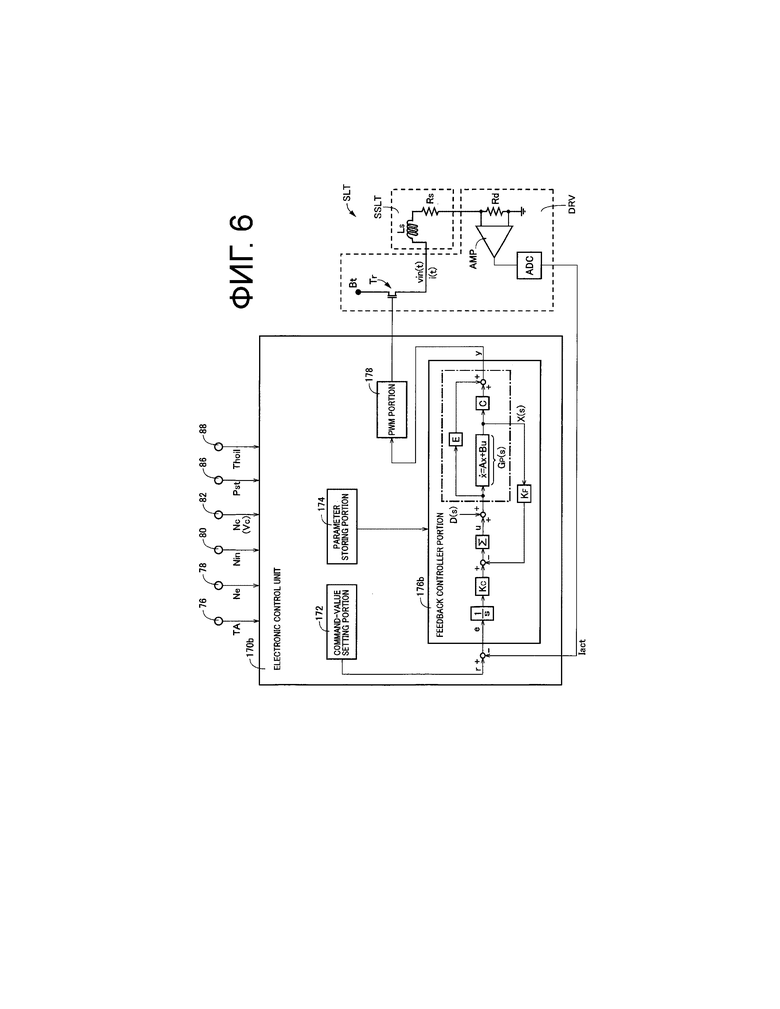
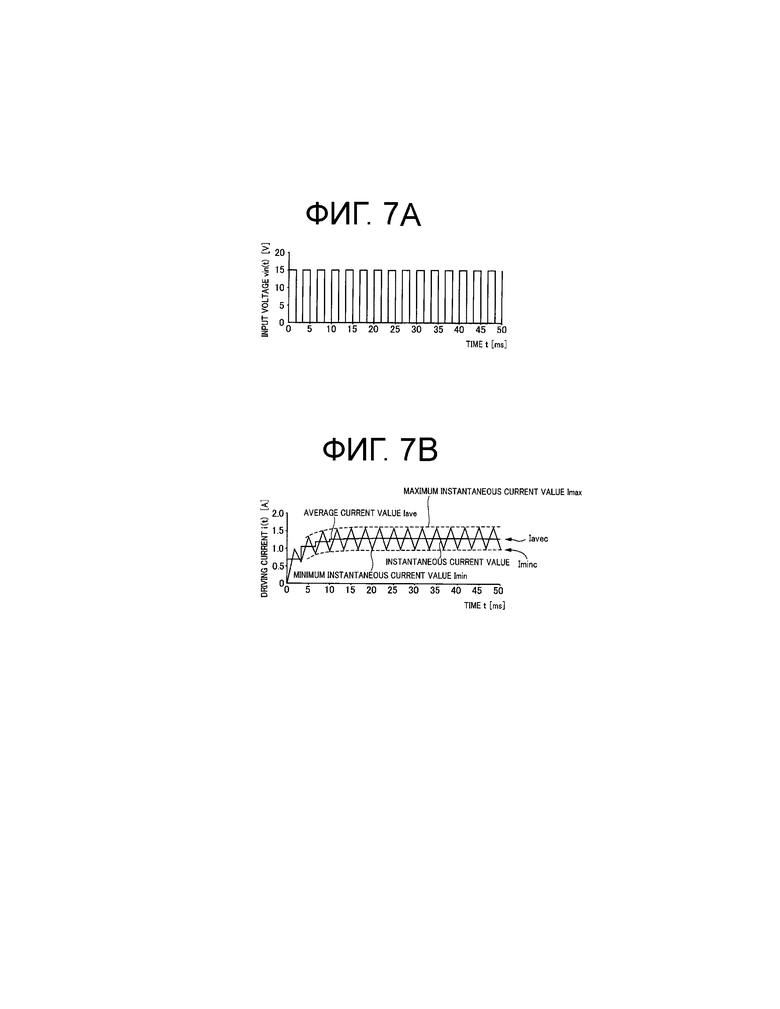
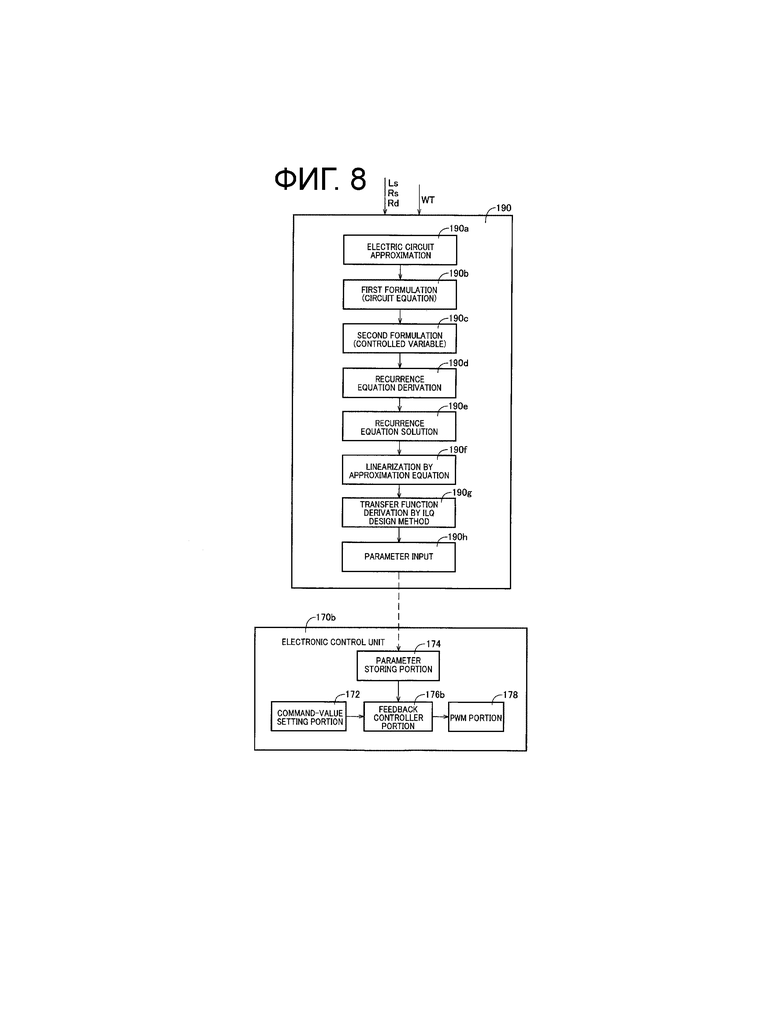
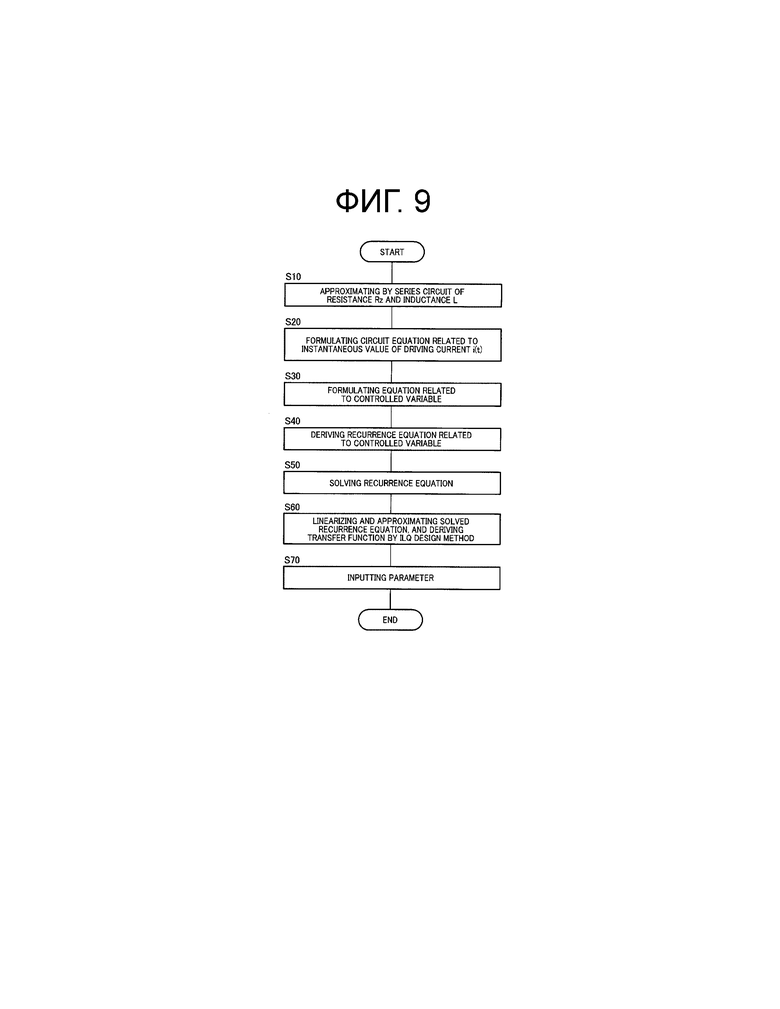
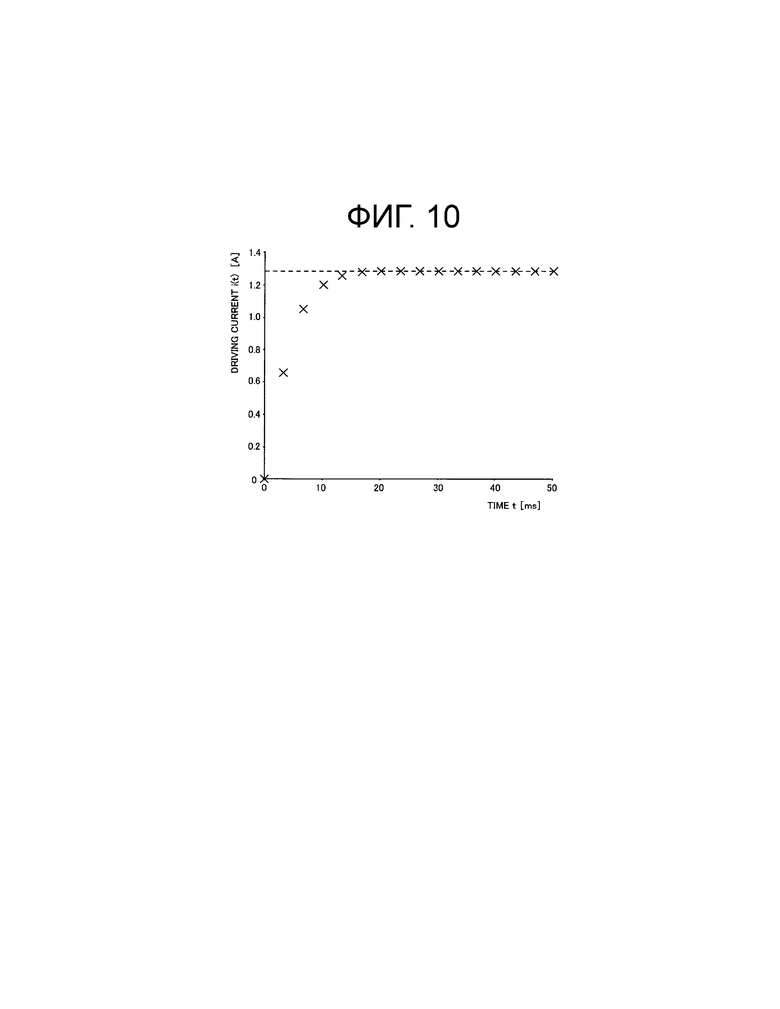
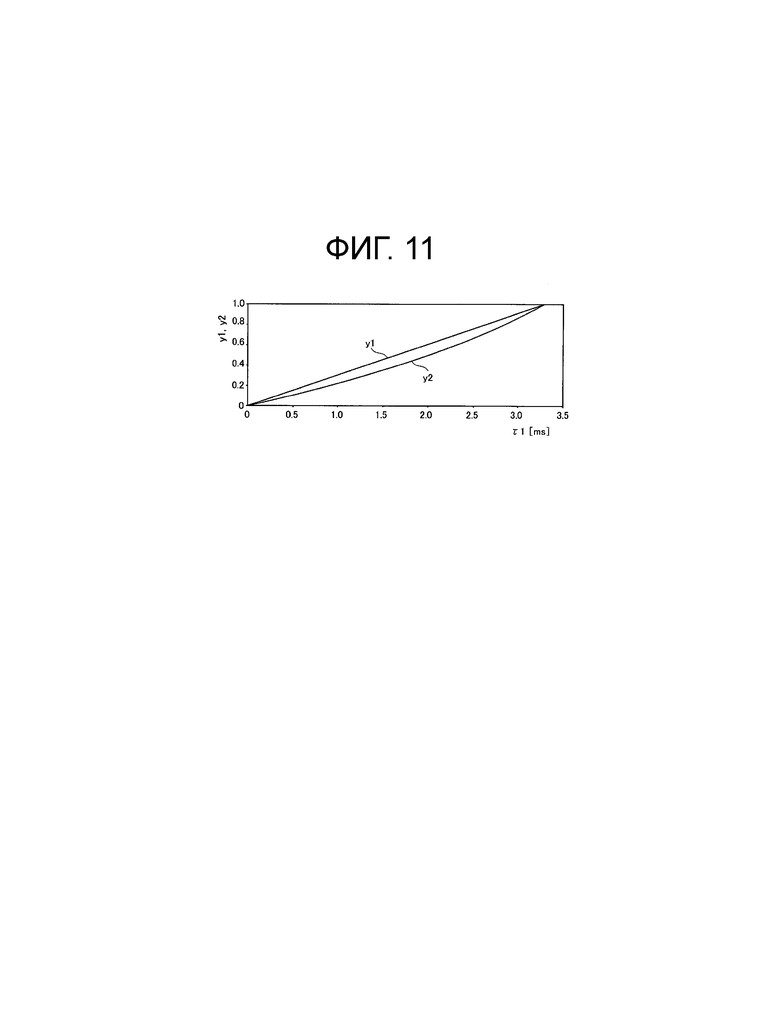
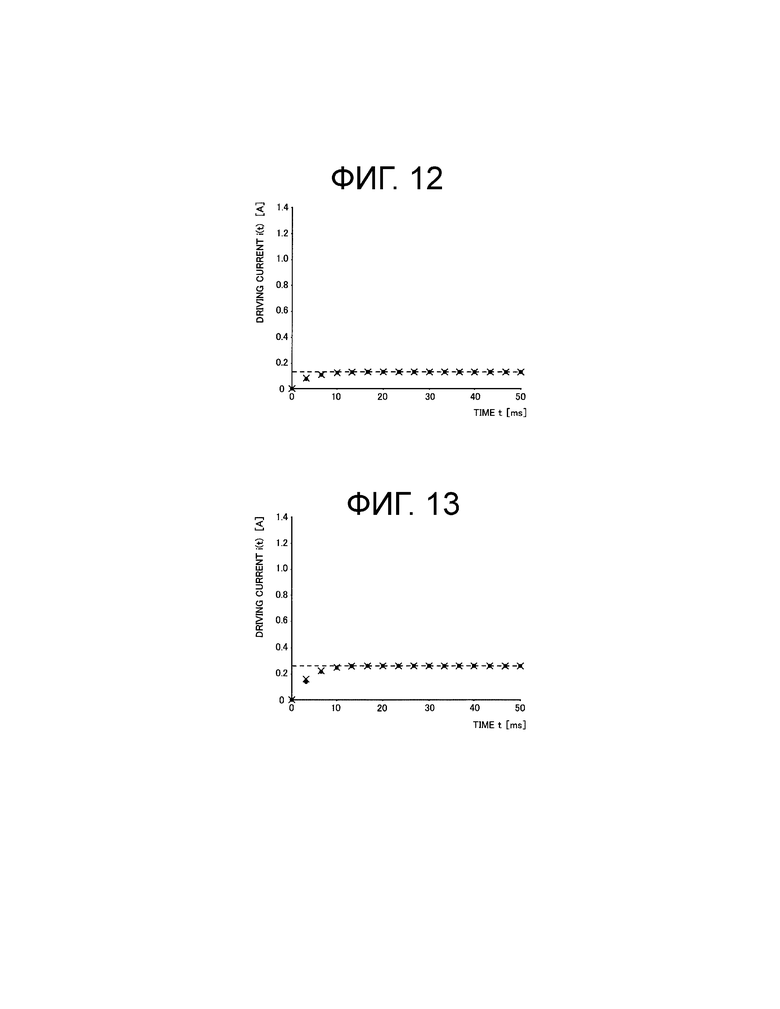
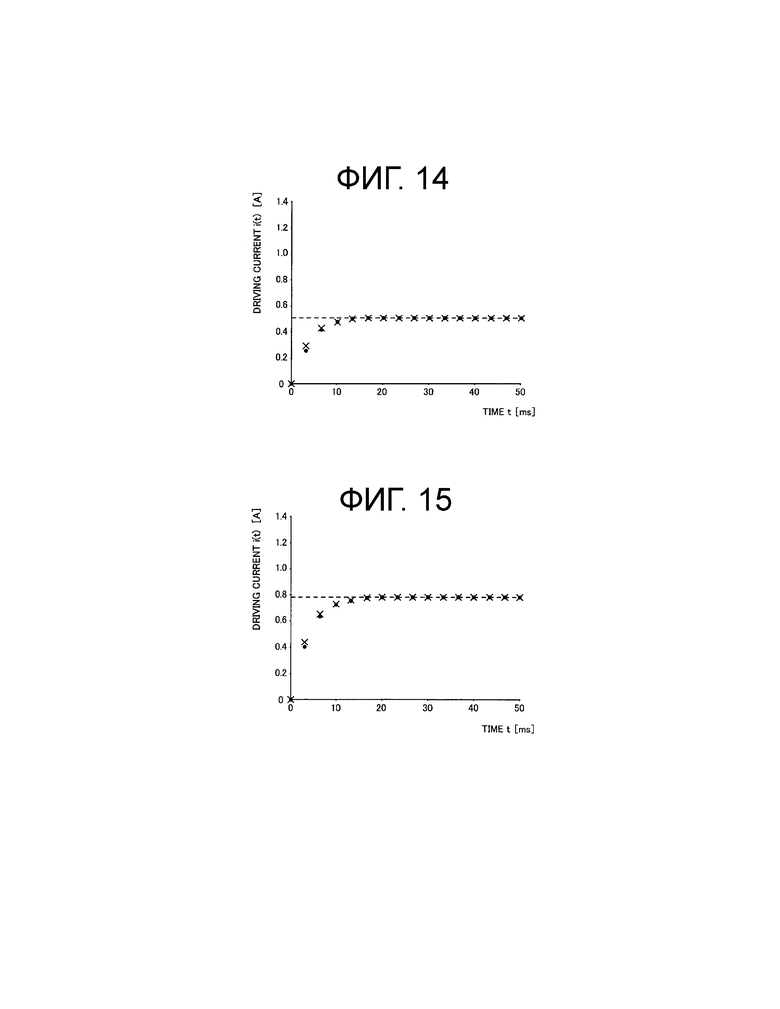
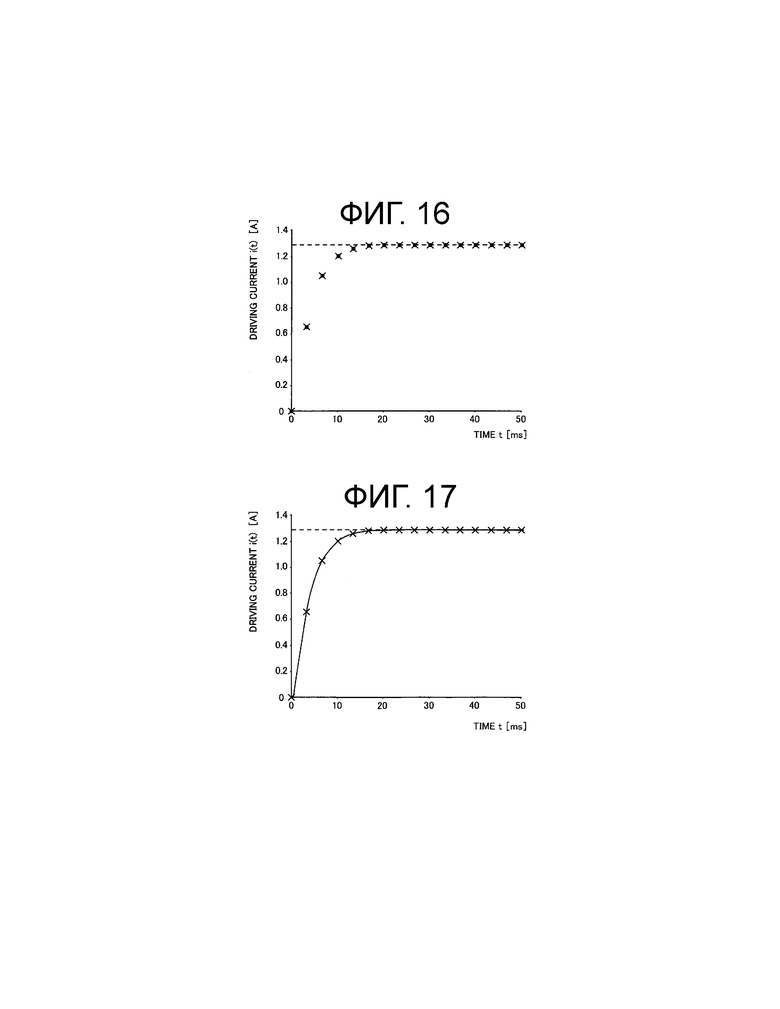

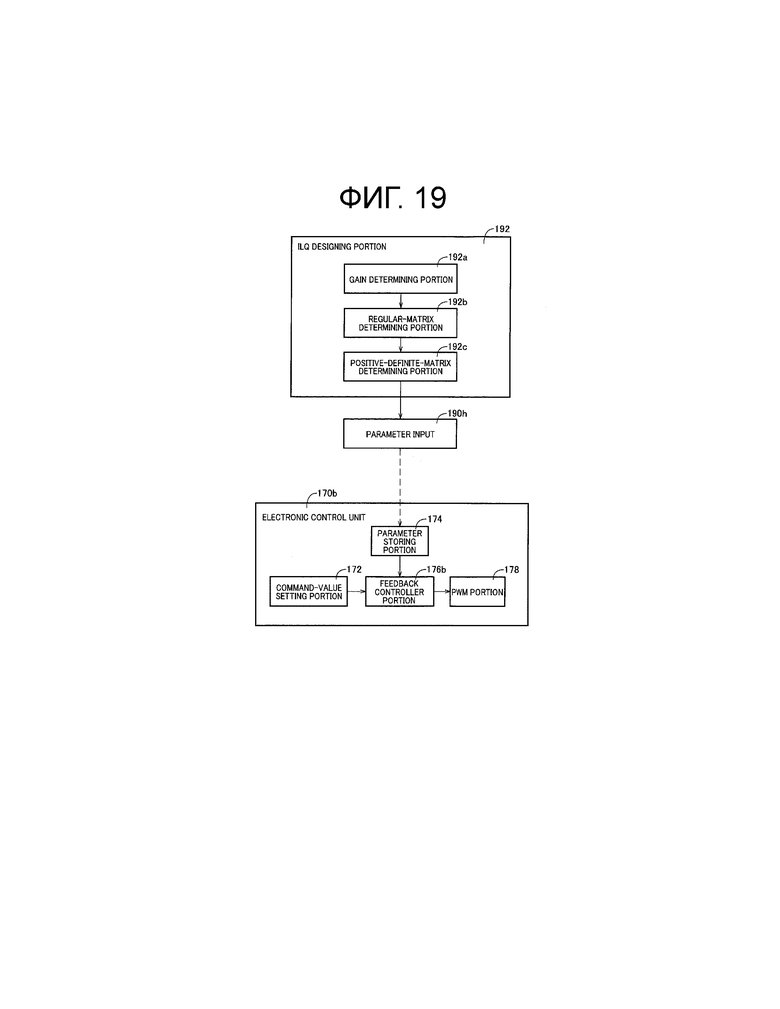
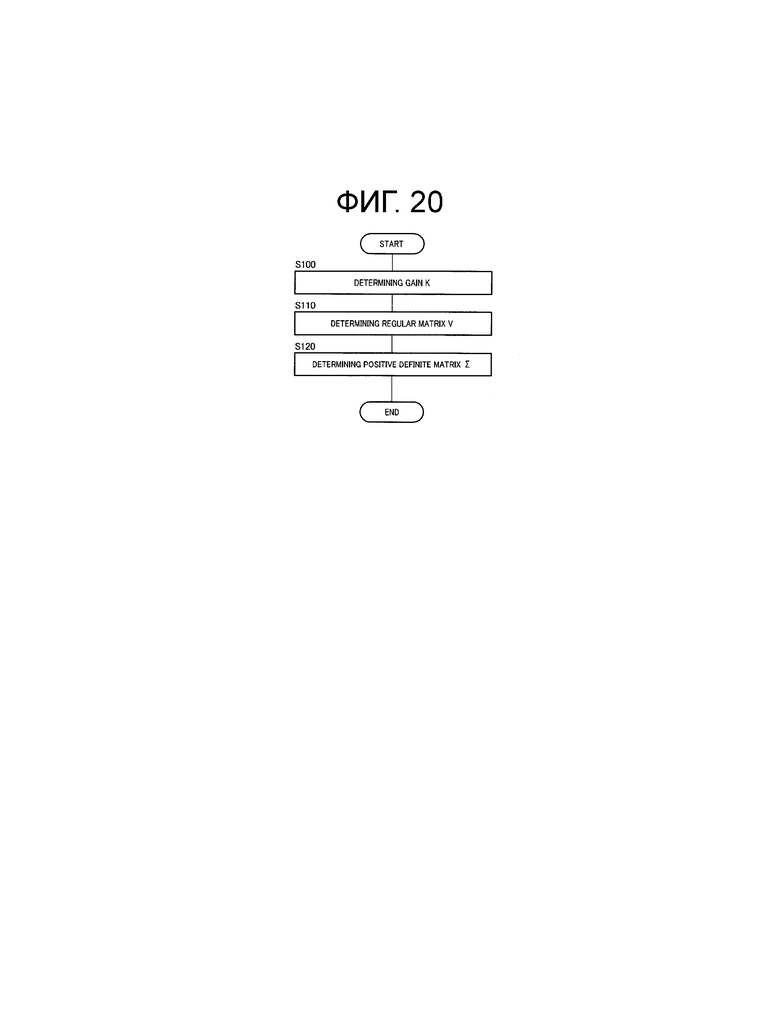
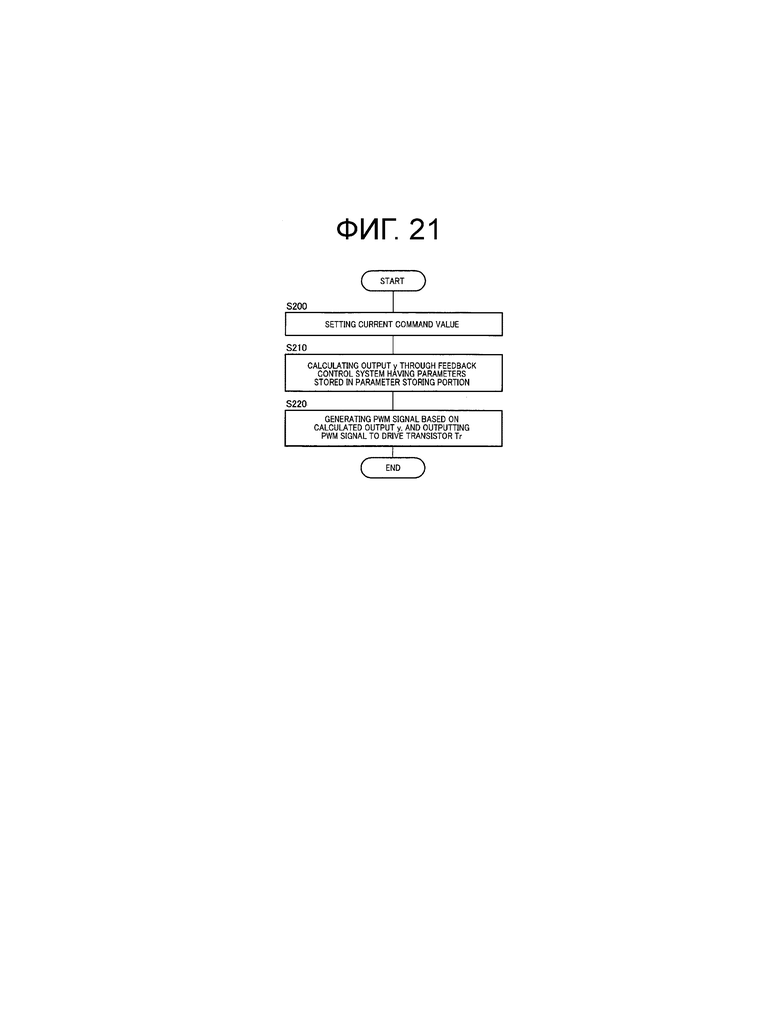
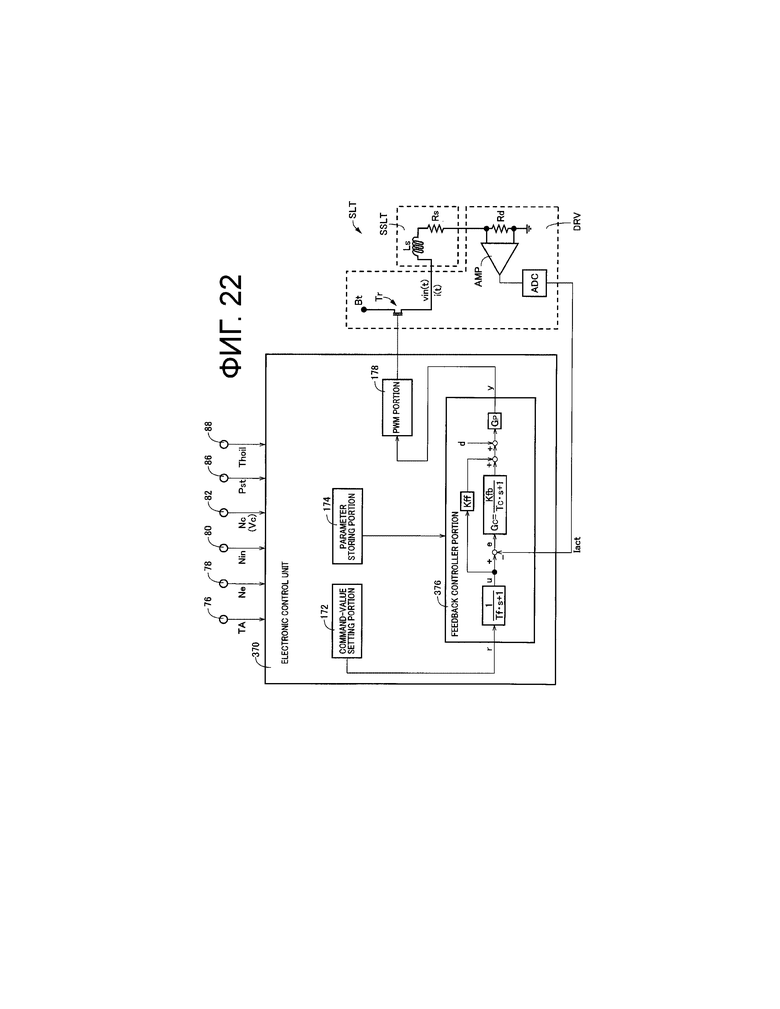
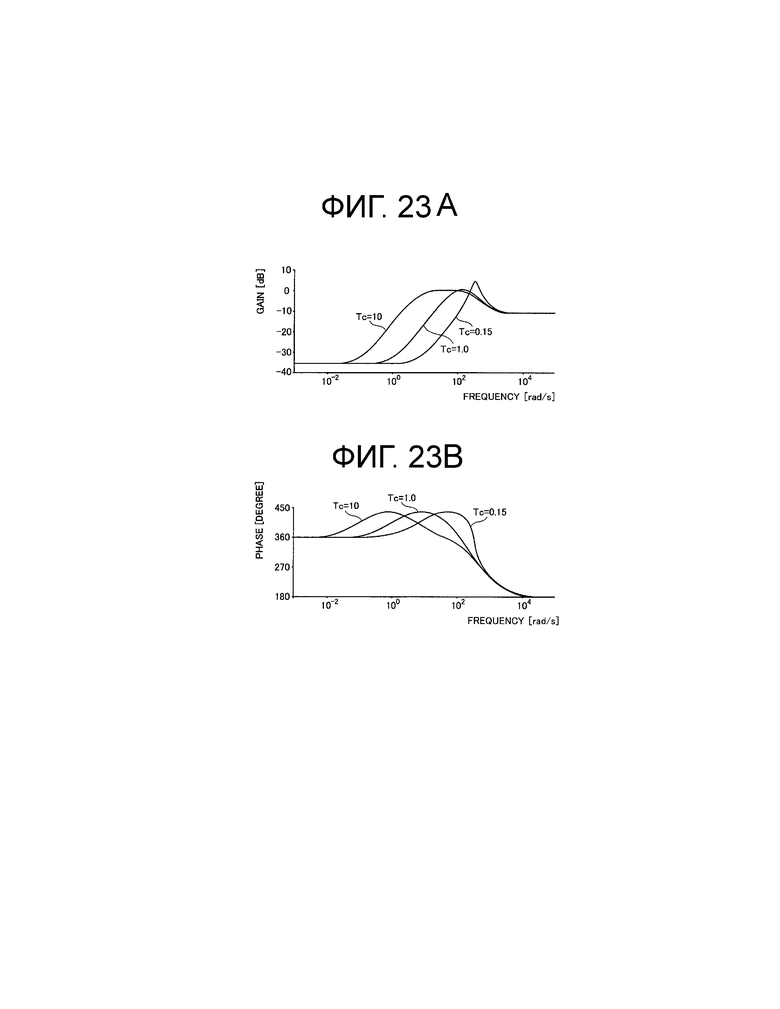
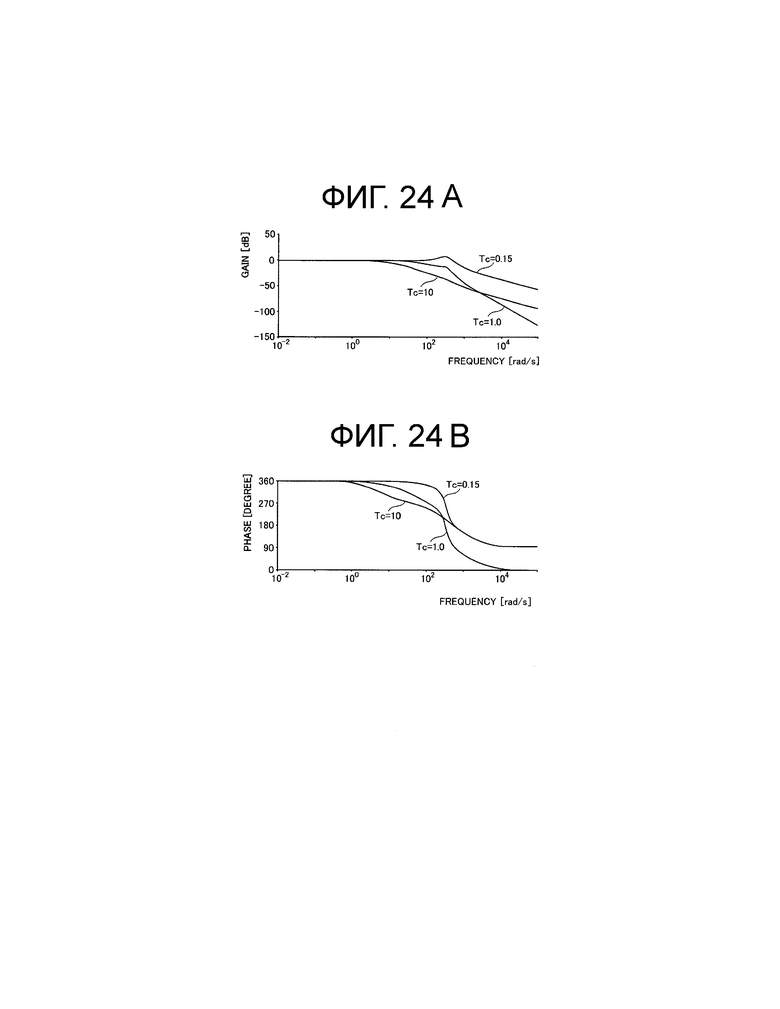
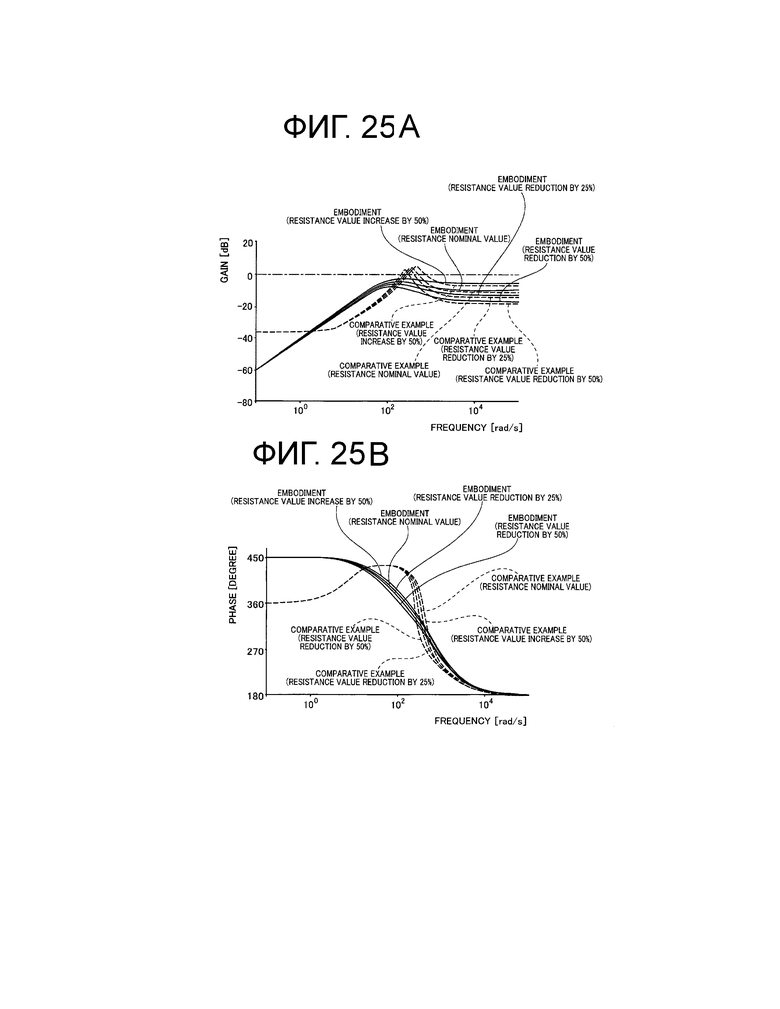
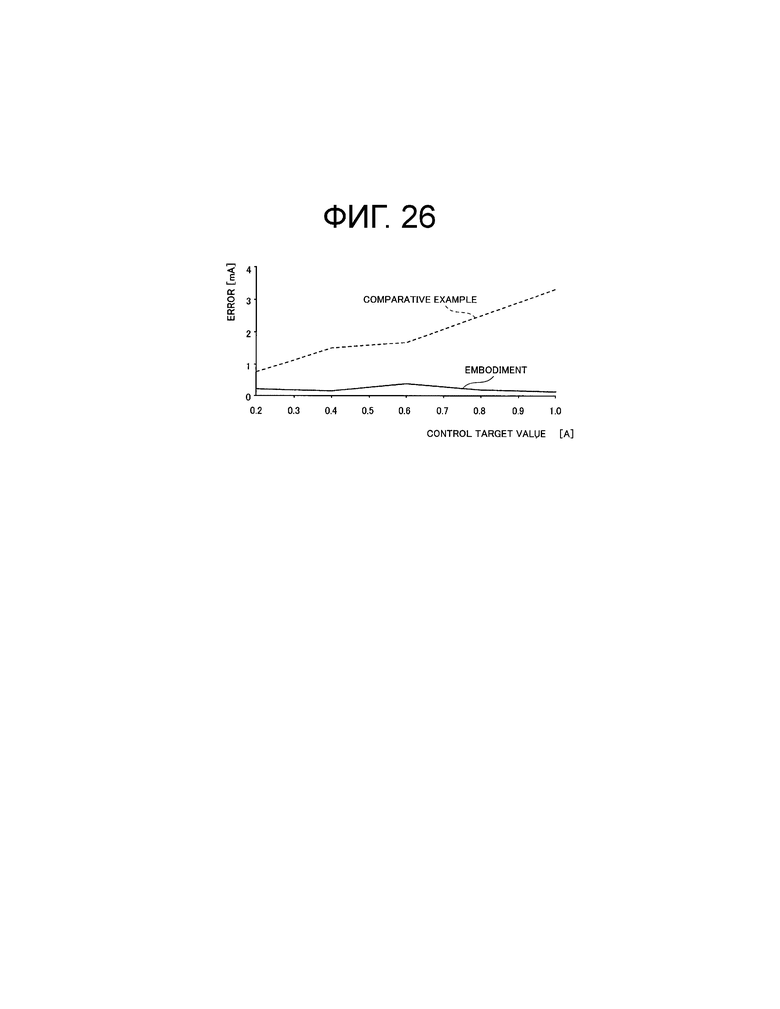
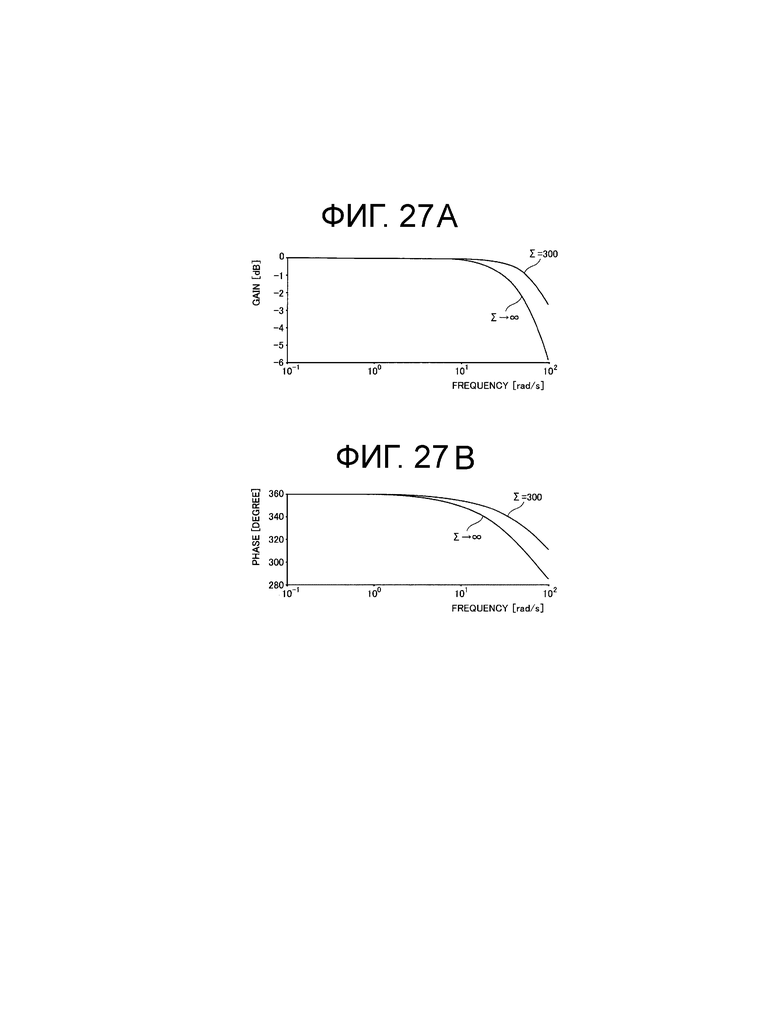
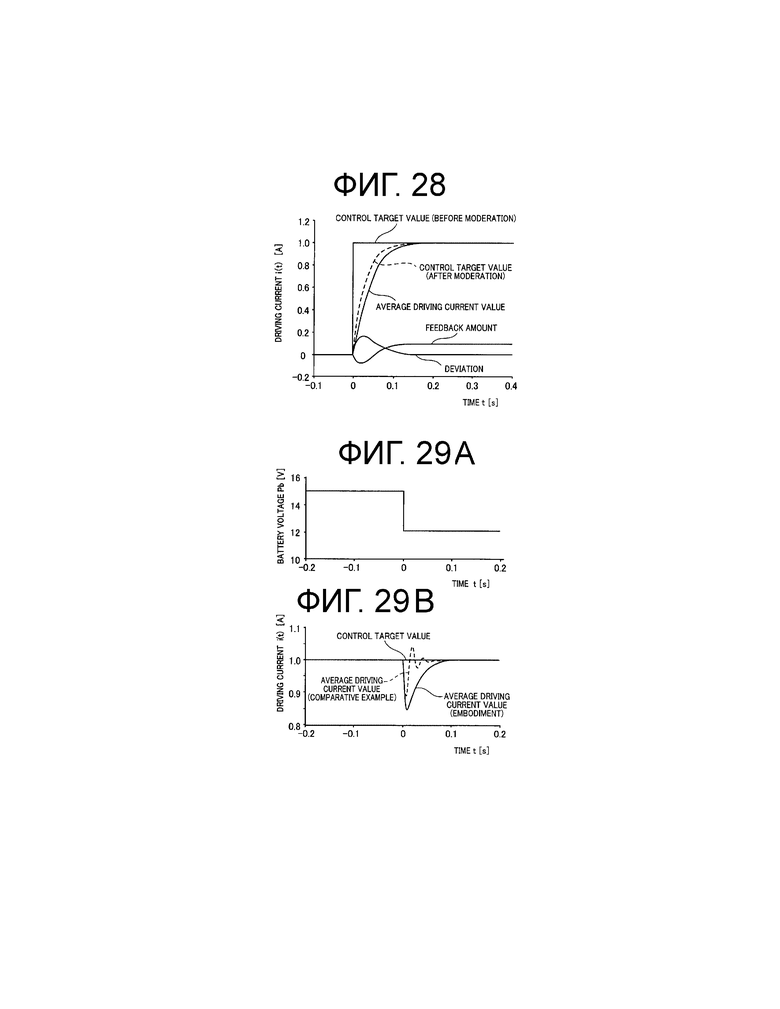
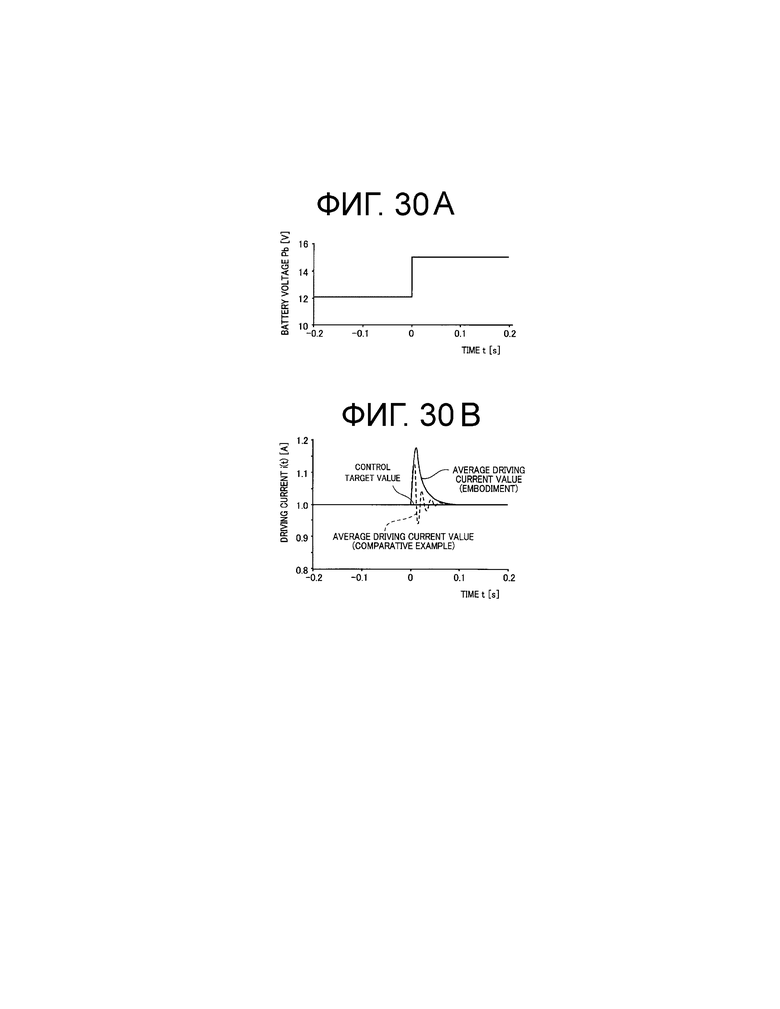
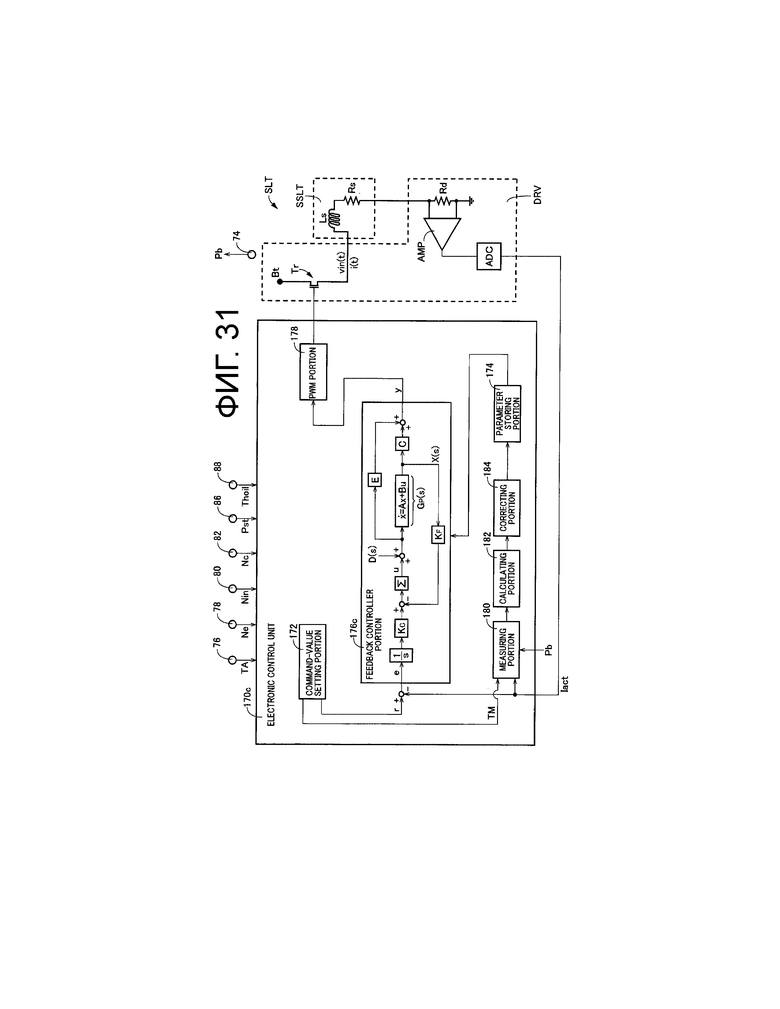
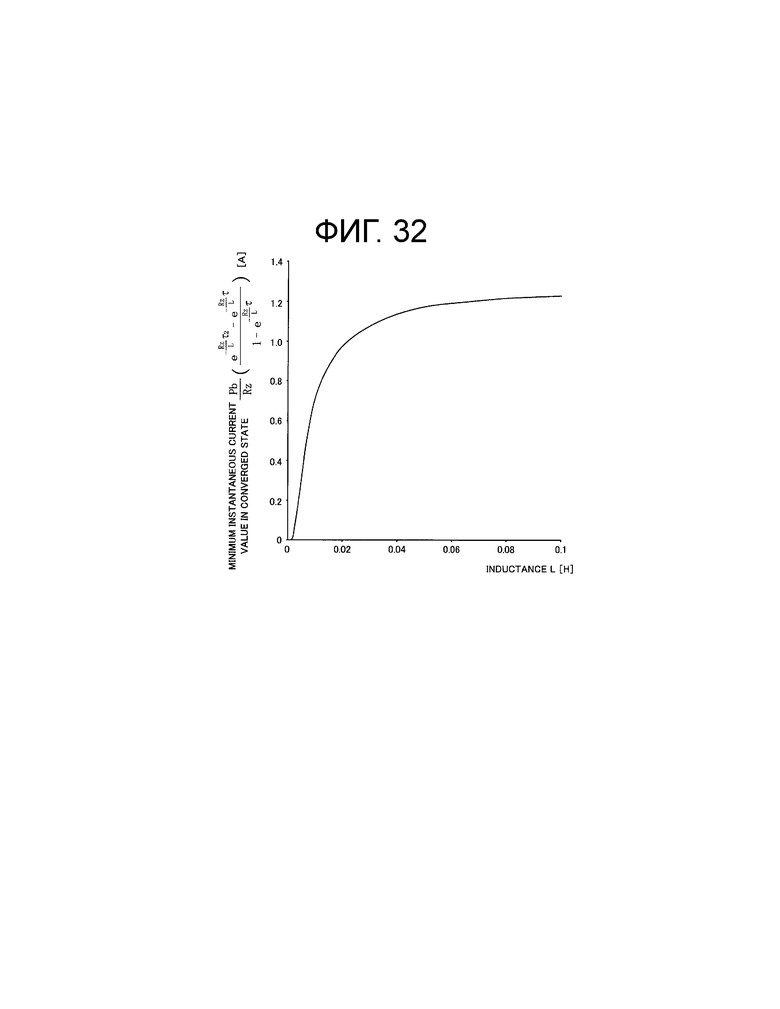
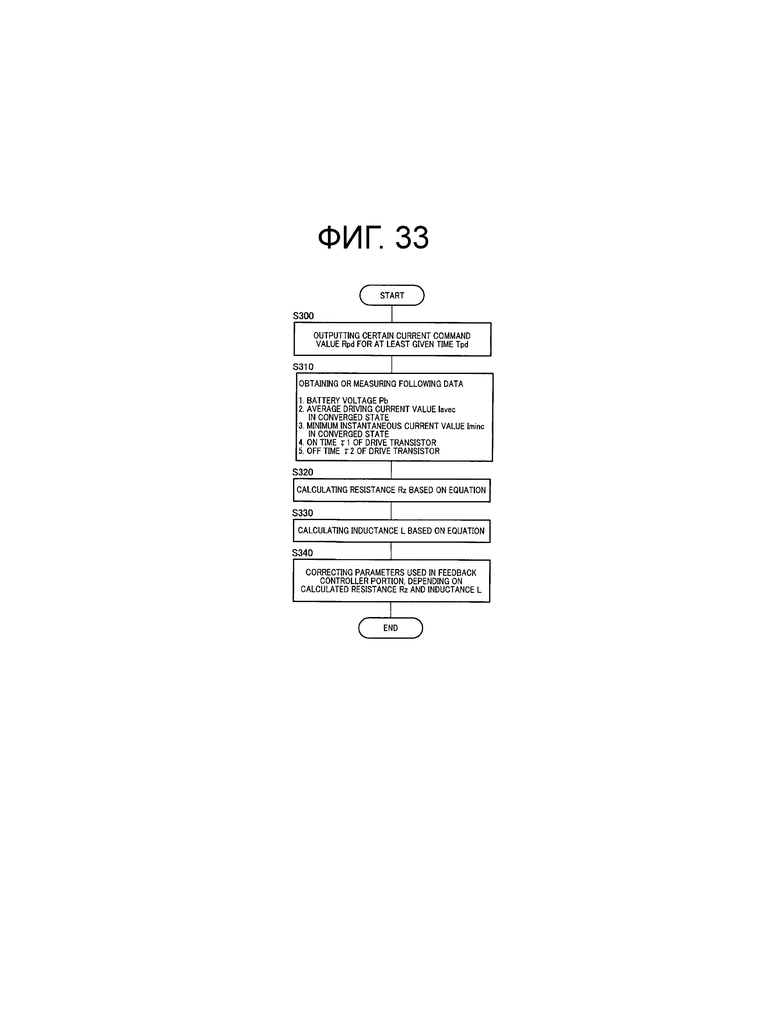
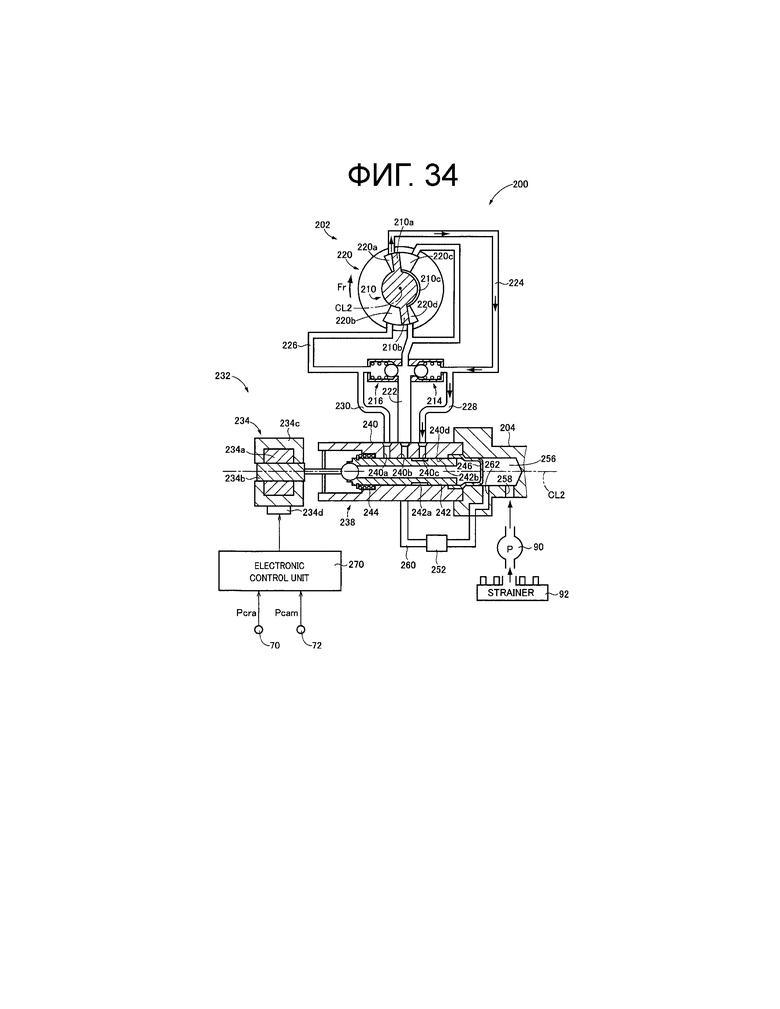
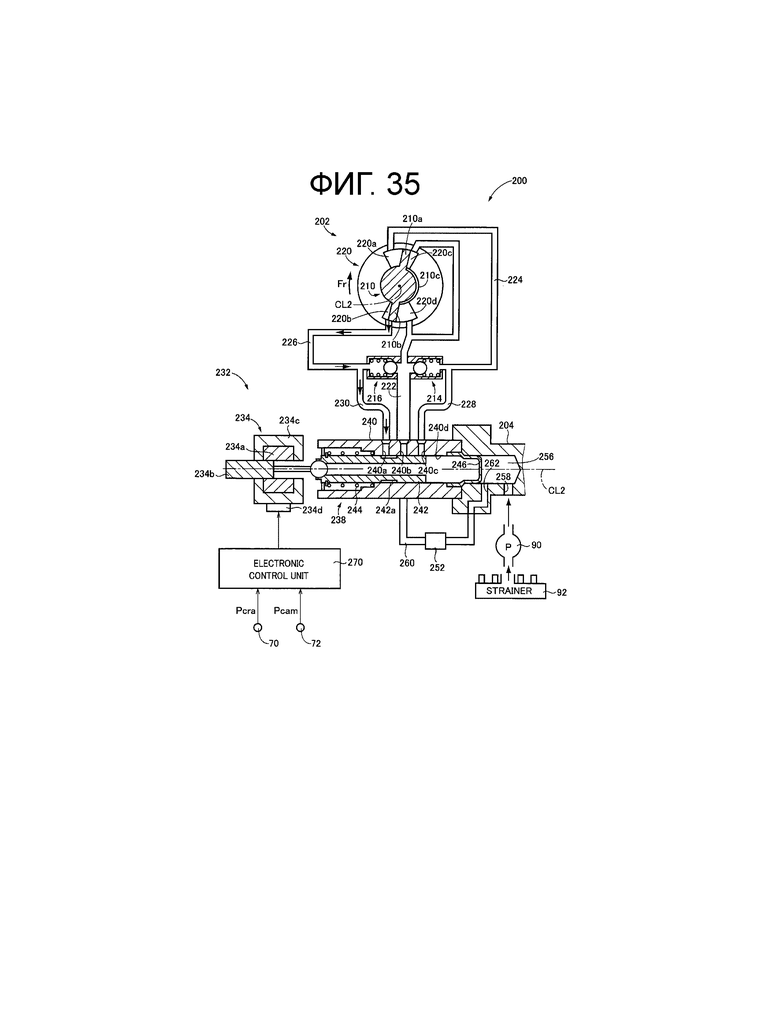
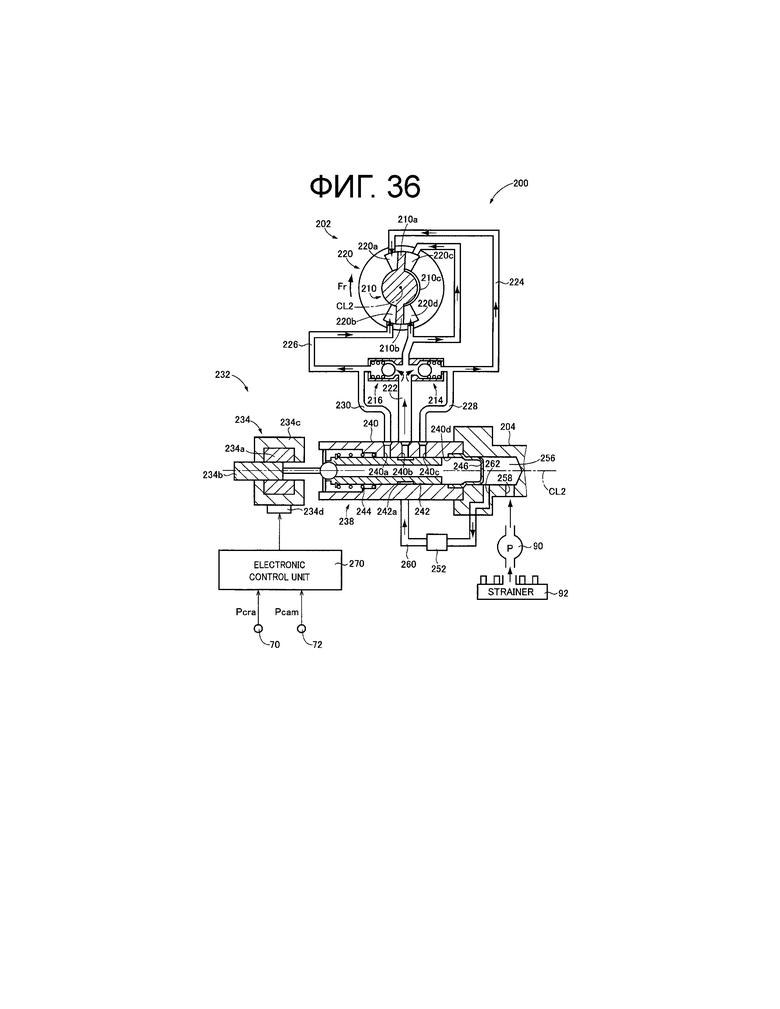
Изобретение относится к системам управления двигателем автомобиля, в частности к адаптации параметров системы управления с обратной связью для управления линейным соленоидом для автоматической трансмиссии. Техническим результатом является обеспечение управления для линейного соленоида, которое допускает уменьшение этапов адаптации для адаптации параметров. Предложено оборудование управления для управления линейным соленоидом посредством управления управляющим током, подаваемым в линейный соленоид через управление с обратной связью. Управление с обратной связью выполняется посредством системы управления с обратной связью, имеющей параметры, которые определяются в соответствии со способом обратного линейного квадратичного проектирования (ILQ-проектирования). В частотной характеристике усиления передаточной функции, представляющей отношение вывода к возмущениям в системе управления с обратной связью, усиление ниже 0 [дБ] по всем частотным диапазонам. 6 з.п. ф-лы, 36 ил. 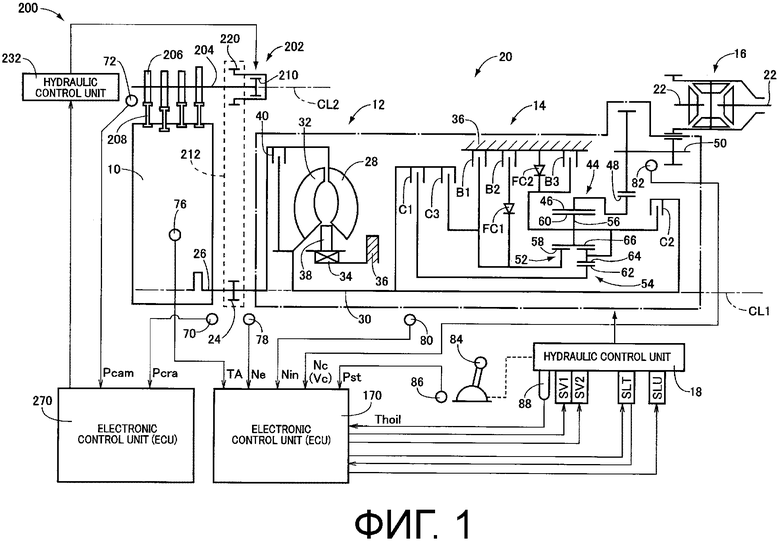
1. Устройство управления для управления линейным соленоидом посредством управления управляющим током, подаваемым в линейный соленоид, с помощью управления с обратной связью, причем управляющий ток, подаваемый в линейный соленоид, управляется посредством входного напряжения, которое получается посредством принудительного управления напряжением аккумулятора путем включения/выключения на основе PWM-сигнала, при этом устройство управления содержит:
узел аппроксимации электрической схемы, выполненный с возможностью аппроксимирования электрической схемы линейного соленоида, через которую протекает управляющий ток, посредством последовательной схемы из сопротивления и индуктивности;
первый узел формулирования, выполненный с возможностью формулирования уравнения схемы, связанного с мгновенным значением управляющего тока, протекающего через последовательную схему;
второй узел формулирования, выполненный с возможностью формулирования уравнения, связанного с регулируемой переменной для управления управляющим током;
узел извлечения рекуррентных уравнений, выполненный с возможностью извлечения рекуррентного уравнения из уравнения, связанного с регулируемой переменной;
узел решения рекуррентных уравнений, выполненный с возможностью решения рекуррентного уравнения;
узел линеаризации, выполненный с возможностью линеаризации решенного рекуррентного уравнения, линеаризованного посредством аппроксимирующего уравнения; и
узел извлечения передаточных функций, выполненный с возможностью извлечения, из линеаризованного уравнения, связанного с регулируемой переменной, передаточной функции управления с обратной связью, которая должна использоваться для того, чтобы определять регулируемую переменную.
2. Устройство управления по п. 1, которое предназначено для линейного соленоида, находящегося в линейном соленоидном клапане, выполненном с возможностью выдачи сигнального давления, величина которого соответствует управляющему току, который определен через управление с обратной связью.
3. Устройство управления по п. 1, которое предназначено для линейного соленоида, находящегося в линейном соленоидном клапане модуля гидравлического управления автоматической трансмиссии транспортного средства, причем линейный соленоидный клапан выполнен с возможностью подачи сигнального давления в клапан регулирования давления в магистрали для управления давлением в магистрали, создаваемым клапаном регулирования давления в магистрали.
4. Устройство управления по п. 1, которое предназначено для линейного соленоида, находящегося в линейном соленоидном клапане модуля гидравлического управления автоматической трансмиссии транспортного средства, причем линейный соленоидный клапан выполнен с возможностью подачи сигнального давления в гидравлические фрикционные зацепляющие устройства для управления гидравлическими фрикционными зацепляющими устройствами, которые управляются для установления позиций передач в автоматической трансмиссии транспортного средства.
5. Устройство управления по п. 1, которое предназначено для линейного соленоида, находящегося в приводе модуля гидравлического управления для управления механизмом регулируемых фаз газораспределения, выполненным с возможностью регулирования времени открытия/закрытия клапанов двигателя транспортного средства, причем привод выполнен с возможностью подачи к механизму регулируемых фаз газораспределения сигнального давления, величина которого соответствует управляющему току, который определен через управление с обратной связью, для формирования гидравлического давления для регулирования времени открытия/закрытия.
6. Устройство управления по п. 1, в котором уравнение схемы формулируется в качестве уравнения (92), уравнение, связанное с регулируемой переменной, которая представляет собой среднее значение управляющего тока в n-й период (n: натуральное число), формулируется в качестве уравнения (93), рекуррентное уравнение формулируется в качестве уравнения (94), и аппроксимирующее уравнение формулируется в качестве уравнения (95), где “t [с]” представляет время, “τ [с]” представляет каждый период возбуждения PWM-сигнала, “τ1 [с]” представляет время включения, которое представляет собой продолжительность, в течение которой управляющий ток (i(t)) подается в линейный соленоид в каждый период возбуждения, “Pb [В]” представляет напряжение аккумулятора, и “L (Гн)” представляет индуктивность:
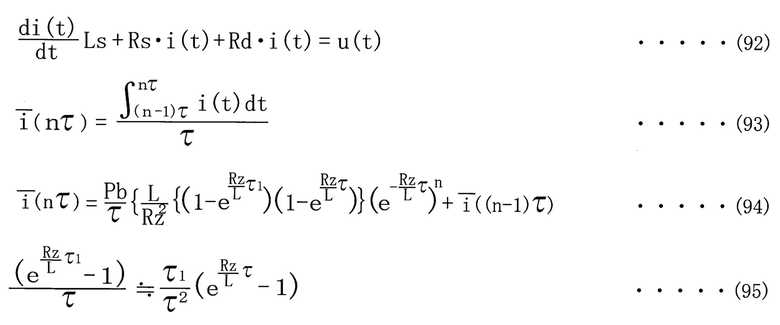
7. Устройство управления по п. 1, в котором управляющий ток, подаваемый в линейный соленоид, управляется посредством входного напряжения, которое получается посредством принудительного управления напряжением аккумулятора путем включения/выключения на основе PWM-сигнала,
при этом сопротивление Rz [Ом] электрической схемы линейного соленоида, через которую протекает управляющий ток, вычисляется в соответствии с уравнением (96), и индуктивность L [Гн] электрической схемы вычисляется в соответствии с уравнением (97), где “τ [с]” представляет каждый период возбуждения PWM-сигнала, “τ1 [с]” представляет время включения, которое представляет собой продолжительность, в течение которой управляющий ток подается в линейный соленоид в каждый период возбуждения, “τ2 [с]” представляет время выключения, которое представляет собой продолжительность, в течение которой управляющий ток не подается в линейный соленоид в каждый период возбуждения, “Pb [В]” представляет напряжение аккумулятора, “Iavec [A]” представляет среднее значение управляющего тока в сходящемся состоянии, и “Iminc [A]” представляет минимальное значение мгновенного тока для управляющего тока в сходящемся состоянии,
причем параметры корректируются в зависимости от сопротивления Rz [Ом] и индуктивности L [Гн], которые вычисляются в соответствии с надлежащими уравнениями (96) и (97):

| JP 2003067006 A, 2003.03.07 | |||
| US 2002134956 A1, 2002.09.26 | |||
| JP 2009014118 A, 2009.01.22 | |||
| US 2013327423 A1, 2013.12.12 | |||
| СХЕМА ГИДРАВЛИЧЕСКОГО ПРИВОДА УПРАВЛЕНИЯ ДЛЯ БЕССТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 1999 |
|
RU2232321C2 |

