Область техники, к которой относится изобретение
Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике, и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ авторегулировки скорости, заключающийся в передаче на локомотив информации о количестве свободных блок-участков [Путевая блокировка и авторегулировка. Н.Ф. Котляренко и др. - М.: Транспорт, 1983 - 408 с.]. Способ предназначен для поддержания программной скорости.
Недостатком способа является низкая пропускная способность.
Известен способ регулирования движения поездов, в котором регулирование движения поезда осуществляется по линейным светофорам и сигналам АЛС [Шалягин Д.В. Устройства железнодорожной автоматики, телемеханики и связи / Д.В. Шалягин, Н.А. Цыбуля, С.С. Косенко, А.А. Волков и др. - М.: Маршрут, 2006. - 588 с. стр. 339-345].
Недостатками способа являются низкая пропускная способность ввиду небольшой точности определения координаты препятствия (впереди идущий поезд или сигнал определяется с точностью соответствующей длине блок-участка - 1,0-2,5 км), низкая надежность регулирования движения поездов ввиду того, что информация о плане и профиле пути вводиться посредством системы управления торможением (САУТ-М), а не хранится постоянно в памяти ЭВМ, кроме того, видимость показаний напольных светофоров не всегда удовлетворительна (пыльные или снежные бури, кривые участки пути, разрегулировка положения напольных светофоров).
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является повышение безопасности движением поездов и повышение пропускной способности.
Технический результат достигается тем, что способ регулирования движения поездов ,основанный на приеме оптических сигналов о расстоянии до препятствия, используется для определения оптимальной скорости, информация воспринимается машинистом с электронного локомотивного табло, которое управляется локомотивной ЭВМ, которая управляет тягой и торможением поезда, информация о расстоянии до препятствия определяется станционной ЭВМ, на которую по второму каналу с линейных точек передается информация о прохождении головы или хвоста поезда этих точек, по этому же каналу со станционной ЭВМ на локомотивную ЭВМ через преобразователи сигналов и оптические системы передается информация о расстоянии до препятствия, а по первому каналу осуществляется питание линейных точек, а также за счет короткого перерыва в питании проходит сигнал цикловой синхронизации для синхронной работы ЭВМ и линейных точек.
Целью изобретения является то, что за счет укорочения до 500 м расстояния между линейными точками, повышенной информативности локомотивного табло относительно локомотивного светофора, информации о путевом развитии, плане и профиле пути всей железной дороги и примыкающих дорог, которая постоянно хранится в ЭВМ, оперативная информация передается в линейные точки в момент времени, соответствующего групповому циклу этой точки, а с линейной точки - на локомотивный приемник в момент прохода головой поезда линейной точки.
Краткое описание чертежей
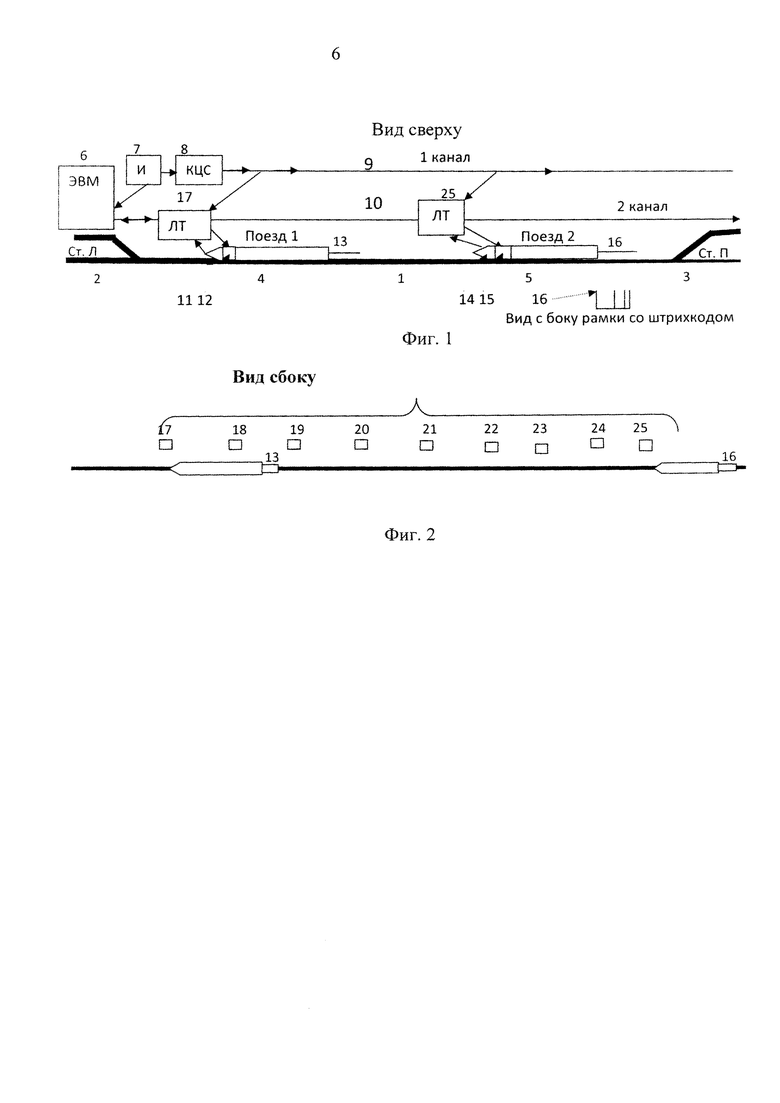
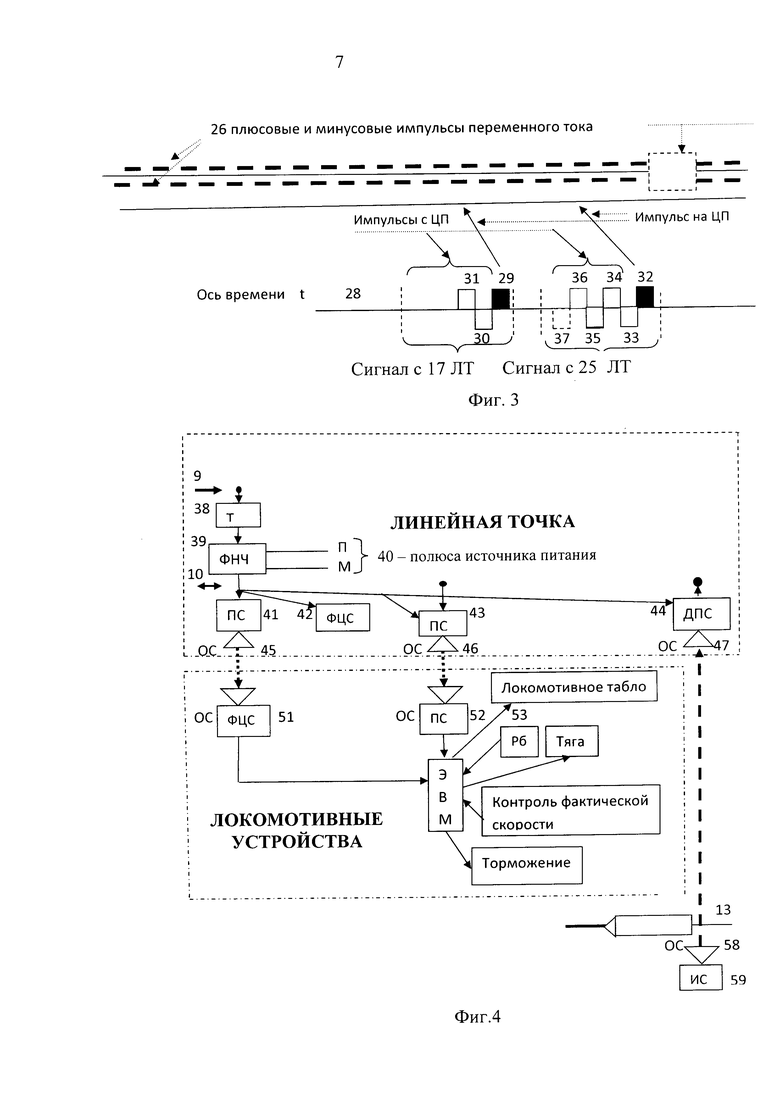
На фиг. 1 представлено расположение путей, аппаратуры и поездов. Нафиг. 2 приведено размещение линейных точек (ЛТ) и поездов. На фиг. 3 представлена структура сигналов телеуправления (ТУ), телесигнализации (ТС) и цикловой синхронизации (ЦС). На фиг. 4 изображена блок схема локомотивных устройств.
Осуществление изобретения
На фиг. 1-4 представлена сквозная нумерация следующих пунктов: 1 - железнодорожный путь перегона; 2 - станция Л (левая); 3 - станция П (правая); 4 - первый поезд; 5 - второй поезд; 6 - электронная вычислительная машина (ЭВМ) на станции Л; 7 - источник питания переменного тока (И); 8 - коммутатор кодовых циклов (КЦС) обеспечивает цикловую синхронизацию линейных точек и приемников поездов (по аналогии с ДЦ «ЛУЧ»); 9 - первый канал обеспечивает питание линейных точек (ЛТ) и создает метки цикловой синхронизации (короткие интервалы в питании около 0,5 с); 10 - второй канал для связи ЭВМ станции Л и поездов, а также управления ЛТ; 11 - локомотивный передатчик первого поезда для фиксации прохождения головой поезда ЛТ; 12 - локомотивный приемник первого поезда для приема информации о протяженности свободной части пути; 13 - хвостовой датчик первого поезда (рамка со штрихкодом крепится в зев автосцепки последнего вагона); 14 - локомотивный передатчик второго поезда для фиксации прохождения головой поезда ЛТ; 15 - локомотивный приемник второго поезда для приема информации о протяженности свободной части пути; 16 - хвостовой датчик второго поезда (рамки со штрихкодом крепится в зев автосцепки последнего вагона), вид рамки 16 сбоку приведен в конце фиг. 1.
На фиг. 2 изображены линейные точки 17-25 и пункты, упомянутые выше (1, 4, 5, 13, 16).
На фиг. 3 изображены следующие пункты: 26 - плюсовые и минусовые импульсы переменного тока; 27 - сигнал цикловой синхронизации - отсутствие питания в течение 0,5 с; 28 - ось времени t, 29 - импульс с линейной точки 17 в ЭВМ о прохождение хвоста поезда 4 мимо этой точки; 30 - импульс с ЭВМ на ЛТ 17 о свободности 500 м участка перед поездом 4; 31 - импульс с ЭВМ на ЛТ 17 о свободности еще одного 1000 м участка; 32 - импульс с линейной точки 25 в ЭВМ о прохождение хвоста поезда 5 мимо этой точки; 33 - импульс с ЭВМ на ЛТ 25 о свободности перед поездом 5 500 м участка; 34 - импульс с ЭВМ на ЛТ 25 о свободности еще одного 1000 м участка; 35 - импульс с ЭВМ на ЛТ 25 о свободности еще одного 1000 м участка; 36 - импульс с ЭВМ на ЛТ 25 о свободности еще одного 1000 м участка; 37 - импульс с ЭВМ на ЛТ 25 о свободности еще одного 1000 м участка (может и не быть, если участок занят).
На фиг. 4 изображены следующие пункты: 38 - линейный трансформатор (Т); 39 - фильтр низкой частоты; 40 - полюса источника питания; 41 - преобразователь сигнала; 42 - формирователь сигнала циклической синхронизации на линейной точке; 43 дешифратор и преобразователь сигнала; 44 преобразователи сигнала; 45, 46, 47, 48, 49 и 50 оптические системы (совокупность линз); 51 - формирователь сигнала циклической синхронизации на локомотиве (ФЦС); 52 - преобразователь сигнала; 53 - рукоятка (кнопка) бдительности; 54 - блок управления тягой; 55 - ЭВМ; 56 - контроль фактической скорости; 57 - блок управления тягой; 58 - оптическая система; 59 - источник света.
Предназначение пунктов: 1 - перегон для пропуска поездов; 2 и 3 - железнодорожные станции для производства скрещения, обгона, маневровой работы и других операций с подвижным составом; 4 и 5 - поезда для перевозки грузов и пассажиров; 6 - станционная ЭВМ для определения протяженности свободного расстояния между поездом и препятствием (поезд, запрещающий светофор, участок ремонтных работ и др.); 7 - источник питания для питания перегонных и станционных устройств, а также элементов передачи и съема информации с локомотива; 8 - для коммутации (формирования) сигнала цикловой синхронизации; 9 - первый линейный канал питания ЛТ и передачи сигнала цикловой синхронизации (ЦС); 10 - второй линейный канал для передачи информации с поезда на станционную ЭВМ и с этой ЭВМ и на локомотивный приемник; 11 - локомотивный передатчик первого поезда для передачи координаты локомотива на ЭВМ, 12 - локомотивный приемник первого поезда для приема информации о длине участка пути до препятствия; 13 - хвостовой датчик первого поезда для определения координаты хвоста поезда посредством решетки со штриходом, укрепленной в зев автосцепки последнего вагона; 14 - локомотивный передатчик второго поезда работает аналогично передатчику первого поезда; 15 - локомотивный приемник второго поезда работает аналогично приемнику первого поезда; 16 - хвостовой датчик второго поезда работает аналогично датчику первого поезда; 17-25 линейные точки для связи с поездами; 26 - импульсы переменного тока (длительностью 20 - 30 с), прерываемые интервалами 0,5 с; сигнал с ЛТ может начинаться импульсами 29 и 32, что означает занятие участка за ЛТ. Эти импульсы передаются не в момент занятия, а с задержкой, которая определяется интервалом, в течение которого осуществляется связь поезда с ЭВМ станции Л (групповой цикл). Затем (в этом же групповом цикле) импульсы, сформированные станционной ЭВМ, поступают на локомотивные приемники всех поездов, импульсы 30 и 31 или 33-37 от ЭВМ информируют о расстояния до препятствия. Импульсы 30 и 33 соответствуют свободности 500 м участкам, остальные импульсы - 1000 м участкам. Сумма импульсов (30 и 31, 33-37) определяет расстояние до препятствия. Импульсов 33 и 30 может и не быть, тогда расстояние до препятствия кратно 1000 м.
Напряжение первого канала 9 понижается линейным трансформатором 38 до 5 В, выпрямляется фильтром 39 и полюса П и М (пункт 40) используются для элементов ЛТ (17-25). Преобразователи сигналов 41, 43 преобразуют электрические сигналы в оптические, преобразователь 52 - оптический сигнал в электрический. Оптические системы 45, 46, 47, 48, 49 и 58 пропускают световой поток в направлении пунктирных стрелок. В ЭВМ станции Л предусмотрена программа (счетчик групповых циклов), которая поочередно подключает ЛТ ко 2-му каналу 10. Синхронную работу ЭВМ, ЛТ и локомотивных приемников и передатчиков обеспечивает сигнал цикловой синхронизации, который поступает на элементы через ФЦС 42 и 51. ДПС 44 работает аналогично ПС, но дополнительно является дешифратором сигнала штрихкода, который формирует элемент 13 (16). Информация о расстоянии до препятствия, план и профиль пути, а также дополнительная информация представлена на локомотивном табло 50, контроль бдительности машиниста проверяется рукояткой 53, режим тяги обеспечивается блоком 54, а торможения - блоком 57, значение фактической скорости определяется блоком 56.
Название «линейные точки» (17-25) используется место термина «сигнальные точки», т.к. линейные точки не имеют сигналов, кроме того они не имеют аппаратуры рельсовых цепей, т.к. рельсовые цепи на перегоне вообще не предусмотрены. Это не является недостатком, т.к. имеется надежный контроль местонахождения поезда, а вместо контрольного режима предусмотрено значительное увеличение проходов дефектоскопов. Кроме того, планируется оптический автоматический контроль рельс камерами, установленными на локомотивах над головками рельс с записью и последующей обработкой локомотивной ЭВМ. Существующий контрольный режим не контролирует излом рельса без нарушения гальванического контакта, а в неблагоприятных случаях и при отсутствии гальванического контакта.
Таким образом, предложенные меры существенно повышают безопасность движения поездов.
Действие метода при движении поездов осуществляется следующим образом. При проходе (фиг. 4) хвостом первого поезда ЛТ 17 световой поток от ИС 59 через ОС 58, хвостовой датчик 13, ОС 47 преобразуется в электрический в ДПС 44, по второму каналу 10 поступает в ЭВМ 6 (фиг. 1), где фиксируется освобождение участка между 17 и 18 ЛТ за счет импульса 29 (фиг. 3). С учетом этого обстоятельства в ЛТ 25 в соответствующий момент времени импульсами 33-37 передается информация о новой длине свободного участка до препятствия. Посредством второго канала 10, ПС 43, ОС 46,ОС 49, ПС52 эта информация поступает в локомотивную ЭВМ 55, которая затем появляется на табло 50, регулирует скорость движения поезда посредством элементов 54 и 57, чем обеспечивают безопасность движения поездов. Кроме того, ЭВМ 55 контролирует бдительность за счет блока РБ и контролирует фактическую скорость за счет блока 56. Для синхронизации работы ЛТ и станционной ЭВМ предусмотрены линейный трансформатор Т 38, фильтр низкой частоты ФНЧ 39, преобразователь сигнала 41 и формирователь сигнала цикловой синхронизации ФЦС 42, связь между которыми показана стрелками. В соответствующие моменты времени ФЦС 43 включает в работу преобразователь ПС 43 и дешифратор-преобразователь ДПС 44.
Для синхронной работы станционной и локомотивных ЭВМ с ПС 41 через ОС 48, ФЦС 51 передается сигнал на ЭВМ 55, которая принимает сигнал с ПС 43 в соответствующий момент времени.
Изобретение относится к области железнодорожной автоматики и телемеханики для регулирования движения поездов. Способ основан на приеме оптических сигналов о расстоянии до препятствия и используемый для определения оптимальной скорости, где электронным локомотивным табло машиниста управляет локомотивная ЭВМ, которая управляет тягой и торможением поезда. Причем информацию о расстоянии до препятствия определяют станционной ЭВМ, на которую по второму каналу с линейных точек передают информацию о прохождении головы или хвоста поезда этих точек, по этому же каналу со станционной ЭВМ на локомотивную ЭВМ через преобразователи сигналов и оптические системы передают информацию о расстоянии до препятствия, а по первому каналу осуществляют питание линейных точек, а также за счет короткого перерыва в питании, проходит сигнал цикловой синхронизации для синхронной работы ЭВМ и линейных точек. Достигается повышение пропускной способности и безопасности движения поездов. 4 ил.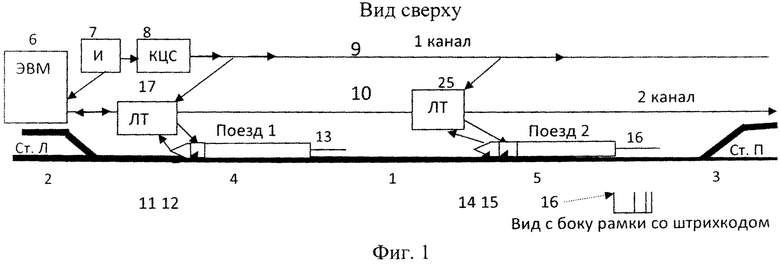
Способ регулирования движения поездов, основанный на приеме оптических сигналов о расстоянии до препятствия и используемый для определения оптимальной скорости, отличающийся тем, что информацию воспринимает машинист с электронного локомотивного табло, которым управляет локомотивная ЭВМ, которая управляет тягой и торможением поезда, при этом информацию о расстоянии до препятствия определяют станционной ЭВМ, на которую по второму каналу с линейных точек передают информацию о прохождении головы или хвоста поезда этих точек, причем по этому же каналу со станционной ЭВМ на локомотивную ЭВМ через преобразователи сигналов и оптические системы передают информацию о расстоянии до препятствия, а по первому каналу осуществляют питание линейных точек, а также за счет короткого перерыва в питании проходит сигнал цикловой синхронизации для синхронной работы ЭВМ и линейных точек.
| RU 2014120248 A, 27.11.2015 | |||
| АВТОБЛОКИРОВКА | 2002 |
|
RU2233224C2 |
| УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2012 |
|
RU2488506C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| RU 138441 U1, 20.03.2014. | |||

