Изобретение относится к области железнодорожной автоматики и может быть использовано для регулирования движения поездов. Известен способ контроля состояний рельсовых цепей перегона посредством поочередного подключения каждой рельсовой линии к путевому генератору расположенному на станции отправления и путевому приемнику расположенному на станции приема [Патент №2291815 РФ, Способ подключения приборов к рельсовой цепи, Полевой Ю.И. и др. Опубл. 20.01.2007. Бюл. №2].
Недостатком известного способа является то, что для выбора рельсовой цепи требуется либо частотное уплотнение линии связи, либо отдельные физические цепи, что возможно с использованием генераторов, фильтров и приемников, или с прокладкой многожильного кабеля, что существенно снижает надежность действия устройств, а также увеличивает капитальные и эксплуатационные затраты.
Известен способ регулирования движения поездов с использованием тональных рельсовых цепей с централизованным расположением аппаратуры [Типовые материалы для проектирования 410306-ТМП, АВТОБЛОКИРОВКА С ТОНАЛЬНЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ И ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ ОБОРУДОВАНИЯ, АБТЦ-03. ОАО «РЖД» Филиал института по проектированию сигнализации, централизации, связи и радио на железнодорожном транспорте «ГИПРОТРАНССИГНАЛСВЯЗЬ». 2004 г.]. Информация о состоянии путевых участков формируется с помощью рельсовых цепей и по линейным проводам передается на прилегающие к перегону станции. На подвижной состав информация о состоянии впередилежащих путевых участках передается с помощью оптических устройств и системы АЛС.
Недостатками системы является использование напольных и локомотивных светофоров, большая жильность кабеля, невысокая точность определения координаты хвоста поезда, а также стандартные требования для каждого из блок-участков по их длине с целью обеспечения снижения скорости или полной остановки поезда, использование нескольких несущих и модулирующих частот, а так же большого количества путевых приборов, определение оптимальной и предельно допустимой скорости по опыту ведения поезда машинистом с учетом плана и профиля пути, параметров поезда и недостатков системы пневматических тормозов.
Данное техническое решение выбрано в качестве прототипа.
Технический результат достигается тем, что способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры основан на контроле состояний рельсовых линий, передаче на подвижной состав информации о количестве свободных впередилежащих рельсовых линий и параметрах маршрута приема (пропуска), напряжение сигнальной частоты с транспортабельного модуля непрерывно подается в первую линейную цепь для осуществления питания через согласующие устройства в попарно соединенные рельсовые линии в интервалы времени, отведенные для контроля этих линий, к другим концам которых так же через согласующие устройства, посредством второй и третьей линейных цепей подключаются путевые приемники на постах ЭЦ, в следующие временные интервалы контролируются другие пары рельсовых линий, временные интервалы задаются с помощью тактовых генераторов с кварцевой стабилизацией, делителей частоты и счетчиков тактов, синхронизация которых осуществляется сигналами цикловой синхронизации, которые формируется в четвертой линейной цепи, в качестве таких сигналов используются кратковременные интервалы между длительными интервалами подачи питания на линейные установки, сигналы цикловой синхронизации формируется в транспортабельном модуле сразу на два направления, подключение напряжения сигнальной частоты к первой линии происходит в транспортабельном модуле, там же формируется и синхроинтервал, подключение согласующих элементов к первой, второй и третьей линейным цепям осуществляется в линейных установках посредством электронных ключей, которые управляются счетными схемами, в которые входят тактовые генераторы, делители частоты и счетчики, входы которых подсоединены к электронным ключам так, чтобы обеспечить поочередный контроль состояний всех рельсовых линий, на входы путевых приемников на постах ЭЦ поступают аналоговые сигналы, которые затем передаются в ЭВМ поста ЭЦ для обработки по алгоритму работы адаптивной рельсовой цепи (относительной, соотносительной или комбинированной), фазы сигналов на входах путевых приемников в смежных промежутках времени отличаются на 180° для того, чтобы снизить влияние инерционности фильтров, этому же способствует сокращение длительности стробирующего импульса передаваемого от ЭВМ на путевой приемник (см. систему «ЛУЧ»), это улучшает условия приема сигнала путевыми приборами при неполной синхронизации работы счетчиков на посту ЭЦ и линейных установках, полученная информация о состоянии рельсовых линий обрабатывается программой ЭВМ и совместно с информацией о номере пути приема (сквозного или безостановочного пропуска), по радиоканалу передается на подвижной состав, находящийся в зоне управления ЭВМ постов ЭЦ, зоной управления является участок от середины одного перегона до середины другого с расширением его в обе стороны на расстояние тормозного пути, расстояние соответствующее времени восприятия сигнала, подготовки к торможению, инерционности действия тормозов и др. параметров поезда и пути (при длине рельсовой цепи 0,5 км этот интервал составляет около восьми рельсовых цепей), с подвижного состава на посты ЭЦ ближайших станций поступает информация о координате головы подвижного состава, на подвижном составе с учетом принятой информации по радиоканалам с постов ЭЦ, а также информации, хранящейся в памяти подвижного состава о параметрах пути, путевого развития станций и поезда с помощью ЭВМ определяется допустимая и оптимальная скорость движения подвижного состава для каждой точки пути и выводится на экран локомотивного навигатора в виде кривых скоростей с отметками мест контроля бдительности, подготовки к торможению, начала торможения и места остановки, а также выводятся на экран рекомендуемые позиции локомотивного контроллера и крана машиниста, позиции органов управления посредством механических устройств управления скоростью движения подвижного состава, вся информация записывается в «черный ящик» для последующего анализа при сбое в регулировании скорости подвижного состава, а также для реализации функции самообучения, во время движения поезда машинист контролирует совпадение рекомендованной и фактической скорости движения.
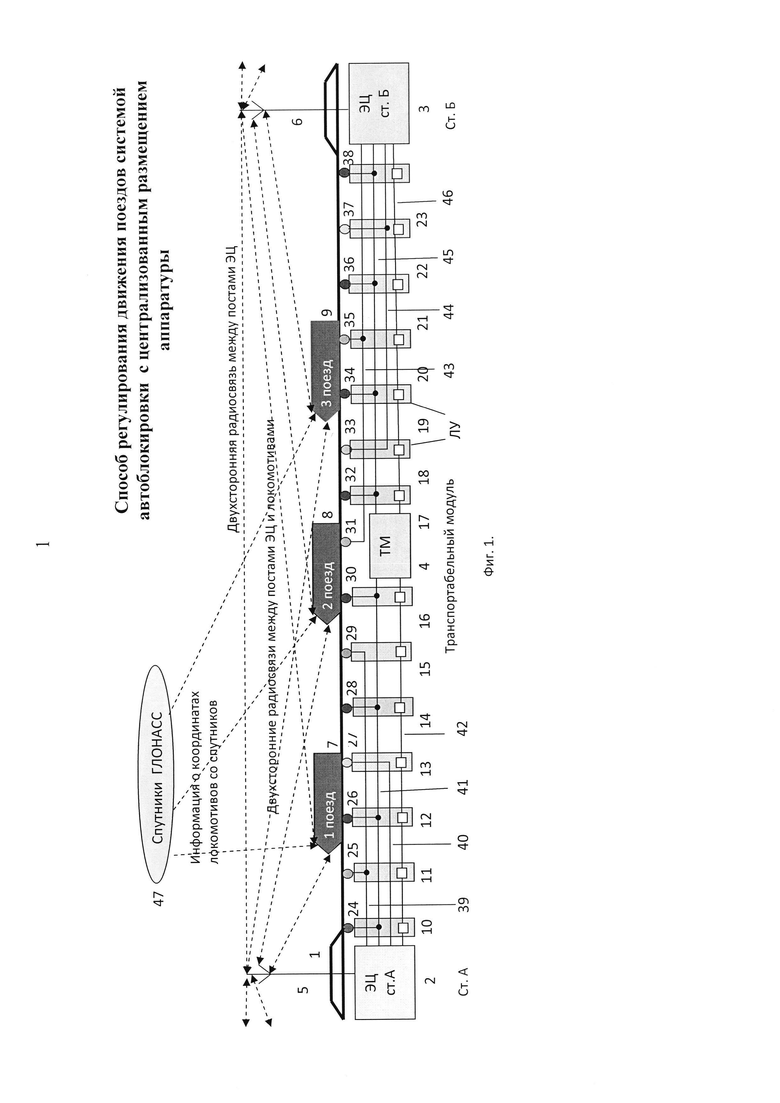
На фиг. 1 представлена схема путевого развития станций А и Б, перегона с размещением постов ЭЦ, транспортабельного модуля (ТМ), линейных установок (ЛУ), устройств сопряжения (УС), кабельных линий и движущимися поездами.
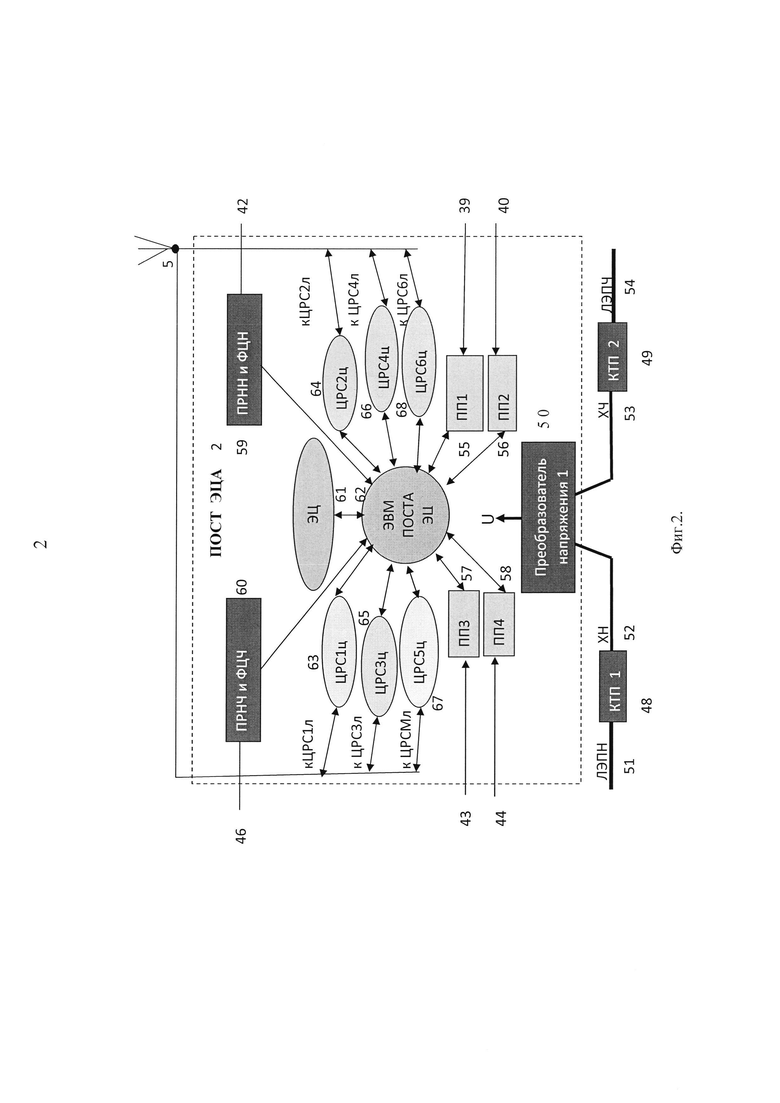
На фиг. 2 изображена структурная схема соединения приборов поста ЭЦ и подвода кабельных линий.
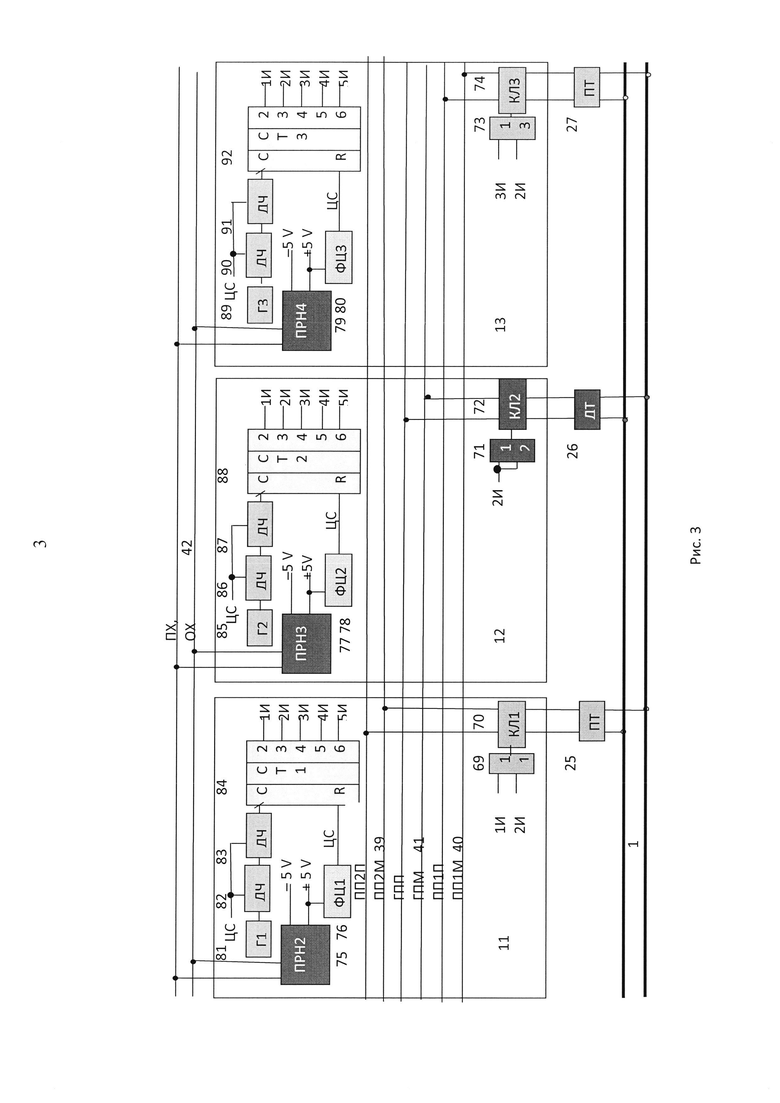
На фиг. 3 показана структурная схема соединения приборов линейных установок и с согласующими приборами и рельсами.
На фиг. 4 представлена структурная схема транспортабельного модуля и кабельные линии.
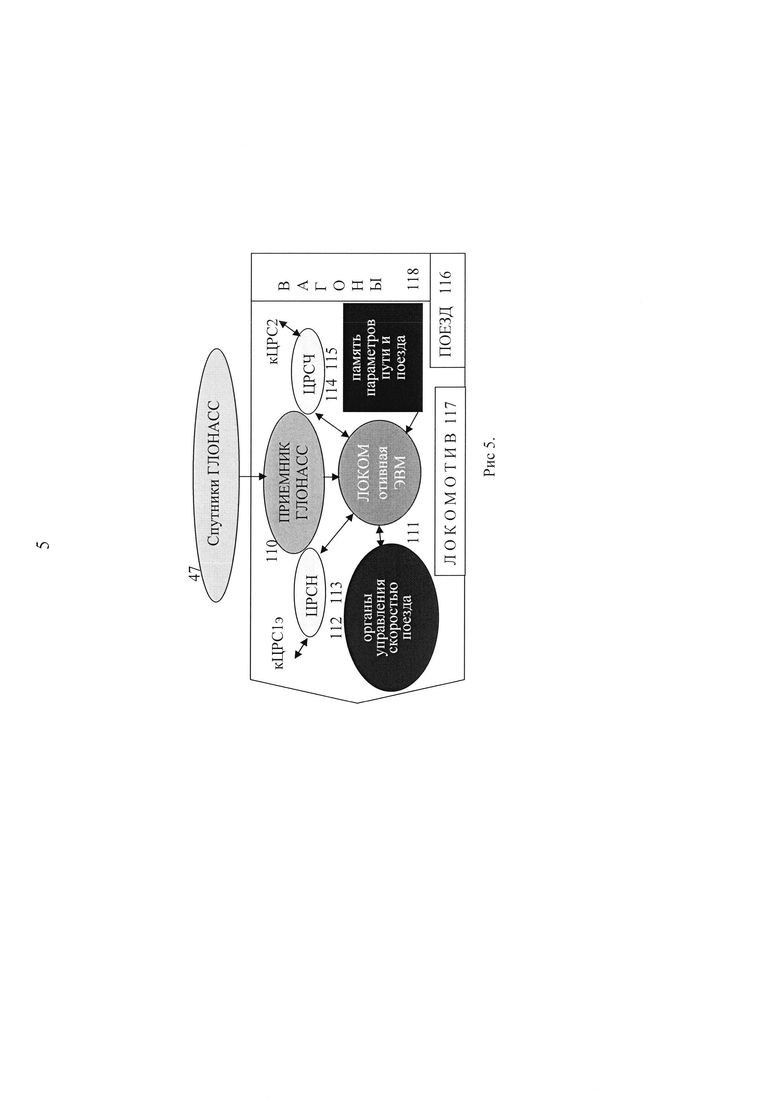
На фиг. 5 изображена структурная схема соединения приборов подвижного состава.
На фиг. 6 показан монитор локомотивного навигатора с путевым развитием, подвижным составом, кривыми скоростей и другой информацией.
На фиг. 1 изображены следующие позиции:
1 - путевое развитие;
2 - пост ЭЦ ст. А;
3 - пост ЭЦ ст. Б;
4 - транспортабельный модуль (ТМ);
5 - антенна ст. А;
6 - антенна ст. Б;
7 - первый поезд;
8 - второй поезд;
9 - третий поезд;
10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23 - линейные установки (ЛУ);
24, 25, 26, 27, 28, 29, 30, 31. 32. 33, 34, 35, 36. 37, 38 - согласующие устройства (УС) (путевые трансформаторы, дроссель-трансформаторы);
39 - жилы кабеля для подключения первого путевого приемника на ст. А;
40 - жилы кабеля для подключения второго путевого приемника на ст. А;
41 - жилы кабеля для подключения первого путевого генератора на транспортабельном модуле;
42 - жилы кабеля для питания линейных установок напряжением 220 B между постов ЭЦ ст. А и ТРМ;
43 - жилы кабеля для подключения первого путевого приемника на ст. А;
44 - жилы кабеля для подключения второго путевого приемника на ст. А;
45 - жилы кабеля для подключения второго путевых генераторов на транспортабельном модуле;
46 - жилы кабеля для питания линейных установок напряжением 220 B между постов ЭЦ ст. Б и ТРМ;
47 - группа спутников ГЛОНАСС.
На фиг. 2 представлена схема, где, кроме приведенных фиг. 1, изображены следующие позиции:
48 - первая контрольно-трансформаторная подстанция;
49 - вторая контрольно-трансформаторная подстанция;
50 - первый преобразователь напряжения;
51 - ЛЭП (ЛЭПН) с нечетной стороны;
52 - провода ПХ и ОХ (ХН) с напряжением 220 B с нечетной стороны;
53 - провода ПХ и ОХ (ХЧ) с напряжением 220 B с четной стороны;
54 - ЛЭП (ЛЭПЧ) с четной стороны;
55 - первый путевой приемник;
56 - второй путевой приемник;
57 - третий путевой приемник;
58 - четвертый путевой приемник;
59 - нечетные преобразователь напряжения (ПРНН) и формирователь сигналов цикловой синхронизации (ФЦН);
60 - четные преобразователь напряжения (ПРНЧ) и формирователь сигналов цикловой синхронизации (ФЦЧ);
61 - устройства ЭЦ;
62 - ЭВМ поста ЭЦ;
63 - первая цифровая радиостанция поста ЭЦ (ЦРС1ц);
64 - вторая цифровая радиостанция поста ЭЦ (ЦРС2ц);
65 - третья цифровая радиостанция поста ЭЦ (ЦРС3ц);
66 - четвертая цифровая радиостанция поста ЭЦ (ЦРС4ц);
67 - пятая цифровая радиостанция поста ЭЦ (ЦРС5ц);
68 - шестая цифровая радиостанция поста ЭЦ (ЦРС6ц).
На фиг. 3 представлена схема, где, кроме приведенных фиг. 1 и 2, изображены следующие позиции:
69 - первый логический элемент ИЛИ;
70 - первый ключ;
71 - второй логический элемент ИЛИ;
72 - второй ключ;
73 - третий логический элемент ИЛИ;
74 - третий ключ;
75 - второй преобразователь напряжения;
76 - первый формирователь сигнала циклической синхронизации;
77 - третий преобразователь напряжения;
78 - второй формирователь сигнала циклической синхронизации;
79 - четвертый преобразователь напряжения;
80 - третий формирователь сигнала циклической синхронизации;
81 - первый тактовый генератор;
82 - первый делитель частоты;
83 - второй делитель частоты;
84 - первый счетчик;
85 - второй тактовый генератор;
86 - третий делитель частоты;
87 - четвертый делитель частоты;
88 - второй счетчик;
89 - третий тактовый генератор;
90 - пятый делитель частоты;
91 - шестой делитель частоты;
92 - третий счетчик;
На фиг. 4 представлена схема транспортабельного модуля, где, кроме приведенных фиг. 1, 2 и 3 изображены следующие позиции:
93 - четвертый тактовый генератор;
94 - седьмой делитель частоты;
95 - восьмой делитель частоты;
96 - четвертый счетчик;
97 - четвертый логический элемент ИЛИ;
98 - четвертый ключ;
99 - первый путевой генератор;
100 - второй путевой генератор;
101 - цепи питания путевых генераторов;
102 - тяга управления цепями питания путевых генераторов;
103 - третья контрольно-трансформаторная подстанция;
104 - четвертая контрольно-трансформаторная подстанция;
105 - пятый преобразователь напряжения;
106 - ЛЭП с нечетной стороны;
107 - провода с напряжением 220 В с нечетной стороны (ХН);
108 - провода с напряжением 220 В с четной стороны (ХЧ);
109 - ЛЭП с четной стороны.
На фиг. 5 представлена схема локомотивных узлов, где, кроме приведенных фиг. 1, 2, 3 и 4 изображены следующие позиции:
110 - локомотивный приемник ГЛОНАСС;
111 - локомотивная ЭВМ;
112 - органы управления скоростью поезда (механические);
113 - локомотивная цифровая радиостанция для связи с цифровой радиостанцией поста ЭЦ станции приема;
114 - локомотивная цифровая радиостанция для связи с цифровой радиостанцией поста ЭЦ станции отправления;
115 - элемент памяти параметров пути и поезда;
116 - поезд;
117 - локомотив;
118 - вагоны поезда.
На фиг. 6 представлен локомотивный навигатор с позициями:
119 - план пути (перегон и станция);
120 - профиль пути;
121 - расположение кривых участков;
122 - впередиидущий поезд;
123 - управляемый поезд;
124 - метка контроля бдительности;
125 - метка подготовки к торможению;
126 - метка начала торможения;
127 - метка остановки головы поезда.
Примечание: КН - позиция локомотивного контроллера;
КМ - позиция крана машиниста; ДТМ - давление в тормозной магистрали;
КБ - кнопка бдительности, остальные обозначения являются общепринятыми.
Алгоритм способа регулирования движения поездов системой автоблокировки с распределенным размещением аппаратуры содержит следующие элементы: сбор информации о состоянии перегонных и станционных рельсовых цепей, установка маршрута (маршрутов), передача информации на подвижной состав, расчет (определения) оптимальной скорости движения подвижного состава с учетом параметров пути и подвижного состава, отображение на экране локомотивного навигатора расчетной информации, реализация расчетных параметров ведения подвижного состава, контроль соответствия полученных и фактических параметров движения.
Сбор информации о состоянии перегонных рельсовых цепей осуществляется следующим образом. Со стороны транспортабельного модуля в сторону станции А 2 по двухпроводной линейной цепи 41 и в сторону станции Б 3 по двухпроводной линейной цепи 45 передается сигнальная частота 480 Гц для поочередного контроля рельсовых линий между согласующими устройствами 31-30-29, 29-28-27, 27-26-25, 25-24, а также 31-32-33, 33-34-35, 35-36-37, 37-38. При таком порядке осуществления контроля требуется всего четыре контрольных такта (КТ). Если длина перегона составляет 25 км, то общее время контроля рельсовых цепей перегона не превышает 1 сек.
На постах ЭЦ двухпроводным линиям 39, 40, 43 и 44 подсоединяются входы путевых приемников. Для синхронизации работы счетных схем в линейных установках и постах ЭЦ, которые позволяют осуществить поочередный контроль рельсовых цепей перегона с временным разделением передаваемой информации на посты ЭЦ прилегающих станций, используется двухпроводные линии 42 и 46. Основное назначение этих линий: обеспечение питания микроэлектронной аппаратуры линейных установок 10, 11, 12, 13, 14, 15, 16, 17, 18. 19, 20, 21, 22 и 23. Вместе с тем после окончания цикла опроса (1 с) питание линейных установок прерывается на 0,1 с, что является синхронизирующим сигналом. В это время питание микросхем осуществляется за счет энергии заряженных конденсаторов размещенных на линейных точках 10-23. На этих же точках предусмотрены электронные ключи, которые с участием счетных схем осуществляют подключения к рельсовым линиям приборов рельсовых цепей. Для снижения влияния инерционности работы фильтров питание смежных участков рельсовых линий осуществляется в противофазе.
На фиг. 2 приведена структурная схема соединения приборов поста ЭЦ. Электропитание приборов поста ЭЦА 2 и ЭЦБ 3 осуществляется от ЛЭПН 51 нечетной стороны или ЛЭПЧ 54 четной стороны напряжением 10 КВ. При этом задействованы первая КПТ1 48 и вторая КПТ2 49 контрольно-трансформаторные подстанции, а так же первый преобразователь напряжения 50 с выходными напряжениями постоянного и переменного тока 5, 10, 15, 20, 25, … В. КТП и преобразователь связаны линиями ХН 52 и ХЧ 53. Постовая ЭВМ 62 обменивается информацией с устройствами ЭЦ 61, путевыми приемниками 55, 56, 57, 58, цифровыми радиостанциями 63, 64, 65, 66, 67, 68, а также получает сигналы цикловой синхронизации с устройств 59 и 60, которые соединены с линейными устройствами линиями 42 и 46. Путевые приемники получают информацию по линиям 39, 40, 43 и 44.
ЭВМ с путевых приемников 43, 44, 55, 56 получает информацию с рельсовых линий перегонов, с цифровых радиостанций 63, 64, 65, 66, 67, 68 - о координате головы подвижного состава, с устройств ЭЦ 61 - о состоянии станционных объектов (номере пути приема, отправления). На основании полученной информации ЭВМ 62 формирует радиосигналы на локомотивы поездов о количестве свободных впередилежащих путевых участков и номере пути приема и отправления.
По радиоканалу передается информация на подвижной состав, находящийся в зоне управления ЭВМ постов ЭЦ. Зоной управления является участок от середины одного перегона до середины другого с расширением его в обе стороны на расстояние тормозного пути, расстояние, соответствующее времени восприятия сигнала, подготовки к торможению, инерционности действия тормозов и др. параметров поезда и пути (при длине рельсовой цепи 0, 5 км этот интервал расширения составляет около восьми рельсовых цепей). С подвижного состава на посты ЭЦ ближайших станций поступает информация о координате головы подвижного состава,
На фиг. 3 приведена структурная схема соединения приборов линейных установок 11, 12, 13, питание которых осуществляется с участием проводов ПХ-ОХ 42, второго преобразователя 75, третьего преобразователя 77, четвертого преобразователя 79. Для выбора временных интервалов контроля состояний рельсовых линий предусмотрен тактовый генератор 81 (85 и 89), делители частот 82 и 83 (86 и 87, 90 и 91), а также счетчик 84 (88 и 92). При этом формирователь цикловой синхронизации ФЦ1 76 (ФЦ 2 78 и ФЦ3 80) обеспечивают синхронную работу счетчиков 84, 88 и 92, При нахождении счетчиков 84, 88 и 92 во второй позиции (на выходах 2И всех счетчиков появляется потенциал логической единицы (ЛЕ)) к рельсовой линии 1 с участием элементов 69, 70, 25 подключена линейная цепь 39, с участием элементов 71, 72, 26 - линейная цепь 41, с участием элементов 73, 74, 27 - линейная цепь 40. Таким образом, контролируется рельсовая линия между путевыми трансформаторами 25 и 27, к которым подсоединены путевые приемники 55 и 56 с участием линий 39 и 40 (фиг. 2), а к середине этой рельсовой линии - путевой генератор ГП1 99 (фиг. 4) с участием линии 41.
На фиг. 4 приведена структурная схема транспортабельного модуля 4. Питание модуля может осуществляться от линии электропередачи ЛЭПН 106 или ЛЭПЧ 109 через контрольно-трансформаторные подстанции КПТ3 103 и КТП4 104, напряжение 220 В по цепи ХН 107 и ХЧ 108 подается на преобразователь напряжения 105, с выхода которого осуществляется питание микроэлектронных цепей. Питание рельсовых цепей осуществляется по цепям 41 и 45 с участием путевых генераторов ГП1 99 и ГП2 100.
Питание линейных установок 10-16 и 17-32 (фиг. 1) осуществляется от линий 42 и 46 от общей цепи 101 (фиг. 4), при условии, что ключ КЛ4 98 открыт и на входе У потенциал ЛЕ. Управление ключом осуществляется счетной схемой с элементами: тактовый генератор Г4 93, делители частоты ДЧ7 94 и ДЧ8 95, счетчик СТ4 96 и логический элемент ИЛИ4. На выходах 31 и 32 счетчика СТ4 96 в конце цикла контроля состояний рельсовых линий появляется потенциал логической единицы, благодаря чему в линиях 42 и 46 прерывается напряжение питания (сигнал цикловой синхронизации Ц).
На фиг. 5 приведена структурная схема приборов контроля и регулирования скорости подвижного состава. С помощью спутников системы ГЛОНАСС 47 локомотивный приемник 110 определяет местонахождение локомотива и передает координаты на локомотивную ЭВМ 111. На ЭВМ передается информация с блока памяти 115 о планах и профилях станций и перегонов, параметрах поезда. С прилегающих к перегону станций по радиоканалам с участием цифровых локомотивных радиостанций 113 и 114 на локомотивную ЭВМ поступает информация о состояниях перегонных рельсовых цепей, номере станционного пути приема (отправления) и его готовности к пропуску поезда. На станции ограничивающие перегон с локомотива передается информация о движении поезда. На основании полученной локомотивной ЭВМ 111 информации в соответствии с программой регулирования скорости поезда, ЭВМ посредством механических органов управления скоростью поезда 112 воздействует на локомотивный контроллер и кран машиниста.
На фиг. 6 изображен экран локомотивного навигатора с информацией о путевом развитии перегонов и станций (на фиг. 6 станция не отображена) 119, профиле и плане пути 120 и 121; местонахождение впередиидущего и управляемого поездов 122 и 123. Кроме того, отображена допустимая и оптимальная кривые скорости, а также кривая скорости, выбранная машинистом с учетом складывающейся поездной ситуации (Vопт*0,55). На оптимальной кривой скорости отложены метки: контроля бдительности КБ 124, подготовки к торможению (ПТ) 125, начала торможения (НТ) 126, остановки головы поезда ОГП 127.
На фиг. 6 показаны и др. параметры: позиции локомотивного контроллера (КН) (расчетная и фактическая), позиция крана машиниста (КМ) (расчетная и фактическая), давление в тормозной магистрали ДТМ и др. интуитивно-понятная информация. Укороченные рельсовые цепи (500 м) и размещение меток КБ, ПТ, НТ, не связанных с границами рельсовых цепей, существенно повышают пропускную способность.
Предложенный способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры позволяет снизить затраты на строительство и эксплуатацию, повысить пропускную способность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2017 |
|
RU2652319C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2694679C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА УЧАСТКАХ С ЭЛЕКТРИЧЕСКОЙ ТЯГОЙ | 2020 |
|
RU2738487C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ЭЛЕКТРИЧЕСКОЙ ТЯГЕ | 2020 |
|
RU2738486C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2017 |
|
RU2655106C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВЫХ УЧАСТКОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2739086C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ СТАНЦИОННЫХ РЕЛЬСОВЫХ ЦЕПЕЙ | 2019 |
|
RU2725312C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714824C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714965C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2732181C1 |


Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте для регулирования движения поездов. Способ регулирования движения поездов включает сбор информации о состоянии перегонных и станционных рельсовых цепей, установка маршрутов, передача информации о количестве свободных впередилежащих рельсовых линий и параметрах маршрута приема на подвижной состав, расчет и определение оптимальной скорости движения подвижного состава с учетом параметров пути и подвижного состава, отображение на экране локомотивного навигатора расчетной информации, реализация расчетных параметров ведения подвижного состава, контроль соответствия полученных и фактических параметров движения. Достигается повышение пропускной способности перегона. 6 ил.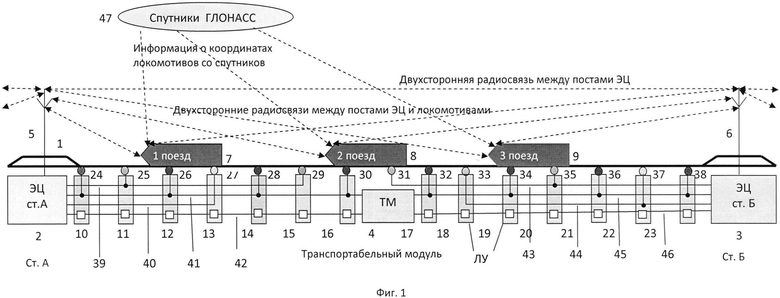
Способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры, основанный на контроле состояний рельсовых линий, передаче на подвижной состав информации о количестве свободных впередилежащих рельсовых линий и параметрах маршрута приема, отличающийся тем, что напряжение сигнальной частоты от транспортного модуля непрерывно подается в первую линейную цепь для осуществления питания через согласующие устройства в попарно соединенные рельсовые линии в интервалы времени, отведенные для контроля этих линий, к другим концам, которые также через согласующие устройства посредством второй и третьей линейных цепей подключаются путевые приемники на постах ЭЦ, в следующие временные интервалы контролируются другие пары рельсовых линий, временные интервалы задаются с помощью тактовых генераторов с кварцевой стабилизацией, делителей частоты и счетчиков тактов, синхронизация которых осуществляется сигналами цикловой синхронизации, которые формируются в четвертой линейной цепи, в качестве таких сигналов используются кратковременные интервалы между длительными интервалами подачи питания на линейные установки, сигналы цикловой синхронизации формируется в транспортабельном модуле сразу на два направления, подключение напряжения сигнальной частоты к первой линии происходит в транспортабельном модуле, там же формируется и синхроинтервал, подключение согласующих элементов к первой, второй и третьей линейным цепям осуществляется в линейных установках посредством электронных ключей, которые управляются счетными схемами, в которые входят тактовые генераторы, делители частоты и счетчики, входы которых подсоединены к электронным ключам так, чтобы обеспечить поочередный контроль состояний всех рельсовых цепей, на входы путевых приемником на постах ЭЦ поступают аналоговые сигналы, которые затем передаются в ЭВМ поста ЭЦ для обработки по алгоритму работы адаптивной рельсовой цепи, фазы сигналов на входах путевых приемников в смежных промежутках времени отличаются на 180° для того, чтобы снизить влияние инерционности фильтров, этому же способствует сокращение длительности стробирующего импульса, передаваемого от ЭВМ на путевой приемник, это улучшает условия приема сигнала путевыми приборами при неполной синхронизации работы счетчиков на посту ЭЦ и линейных установках, полученная информация о состоянии рельсовых линий обрабатывается программой ЭВМ и совместно с информацией о номере пути приема, по радиоканалу передается на подвижной состав, находящийся в зоне управления ЭВМ постов ЭЦ, зоной управления является участок от середины одного перегона до середины другого с расширением его в обе стороны на расстояние тормозного пути, расстояние, соответствующее времени восприятия сигнала, подготовки к торможению, инерционности действия тормозов, с подвижного состава на посты ЭЦ ближайших станций поступает информация о координате головы подвижного состава, на подвижном составе с учетом принятой информации по радиоканалам с постов ЭЦ, а также информации хранящейся в памяти подвижного состава о параметрах пути, путевого развития станций и поезда с помощью ЭВМ определяется допустимая и оптимальная скорость движения подвижного состава для каждой точки пути и выводится на экран локомотивного навигатора в виде кривых скоростей с отметками мест контроля бдительности, подготовки к торможению, начала торможения и места остановки, а также выводятся на экран рекомендуемые позиции локомотивного контроллера и крана машиниста, при реализации функции автоведения, рекомендованные позиции органов управления устанавливаются посредством механических устройств управления скоростью движения подвижного состава, вся информация записывается в «черный ящик» для последующего анализа при сбое в регулировании скорости подвижного состава, а также для реализации функции самообучения: во время движения поезда машинист контролирует совпадение рекомендованной и фактической скорости движения.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| Н | |||
| Г | |||
| Егоренков, В | |||
| А Кононов | |||
| Устройства телеуправления диспетчерской централизации системы "ЛУЧ", М.: Транспорт, 1998 г | |||
| Телефонно-осведомительный аппарат | 1921 |
|
SU306A1 |
| KR 101165355 B1, 18.07.2012. | |||

