Область техники, к которой относится изобретение
Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике, и может быть использовано для регулирования движения скоростных поездов СП. Реализация способа основана на совместной работе четырех устройств: устройстве контроля местонахождения подвижного состава, устройстве контроля целостности рельсовых нитей, устройстве определения расстояния между поездами, устройстве обеспечения безопасности движения поездов.
Уровень техники
Известен способ регулирования движения поездов с использованием устройств радиосвязи, с помощью которых передают с поста электрической централизации ЭЦ на локомотив Л информацию о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля ЗК, т.е. между станцией и серединой перегона, номерах установленных маршрутах УМ и прогнозное время приема/отправления поезда, локомотивной ЭВМ ЭВМЛ, которая на основании полученной информации и информации хранящейся в ее памяти о путевом развитии (станций и перегонов), плане и профиле пути всего участка следования Л, а также с учетом местонахождения Л, которое определяет приемник ГЛОНАСС ПГЛ, рассчитывает протяженность свободного участка пути перед поездом, определяет конфигурацию маршрута (с учетом марок стрелочных крестовин), оптимальную скорость движения поезда в любой точке пути (рассчитывает кривую скорости) и передает информацию о скорости на устройство регулирования скорость поезда УРСП, которое управляет локомотивным контроллером и краном машиниста, поддерживает оптимальную скорость в ЗК (между средними точками перегонов и границами станций);
контроль состояний перегонных рельсовых линий РЛ осуществляют тональными рельсовыми цепями ТРЦ, с помощью двухпроводной линии для питания ТРЦ ЛП и пошаговой работы линейных распределителей ЛРС, и двухпроводной линии контроля ЛК для передачи информации о состоянии РЦ на посты ЭЦ прилегающих станций;
линии ЛП и ЛК укладывают от середины перегона до границы станции, к ЛП на посту ЭЦ подсоединяют тональный путевой генератор ПГ, а к ЛК - тональный путевой приемник ПП; под воздействием станционной ЭВМ ЭВМС ПГ посылает в ЛП серию импульсов, между которыми следует интервал, выполняющий функции сигнала цикловой синхронизации ЦС, импульсы разделены границами, где фаза сигнала изменяется на противоположную;
на границах РЦ устанавливают путевые коробки ПК с аппаратурой питающего конца ПКг (генераторный) или приемного конца ПКп, ПКп и ПКг размещают в шахматном порядке;
выходы линейных распределителей ЛРС, размещенных в ПК, подсоединяют к электронному ключу ЭК так, чтобы осуществлять циклический контроль состояний РЦ;
по ЛК циклически передают информацию на ПП о состоянии РЦ, при этом к ПП посредством путевых трансформаторов ПТ и ЛК подсоединяют приемный конец РЦ, амплитуда сигнала указывает на состояние РЛ (занята/свободна, исправна/неисправна);
на Л передают информацию о состоянии РЦ находящихся в ЗК и дополнительно о РЦ на участке, длина которого соответствует интервалу попутного следования и который примыкает к середине перегона, что является зоной управления ЗУ, это позволяет уверенно регулировать скорость движения поездов пересекающих середину перегона;
передачу информации с поста ЭЦ на Л осуществляют с помощью приказа телеуправления ТУ с участием радиопередатчика поста ЭЦ РПЭ, прием информации на Л с поста ЭЦ - с помощью локомотивного радиоприемника РПЛ, на все Л, находящиеся в ЗУ, передают одинаковую информацию: о свободных РЦ на перегоне и установленных маршрутах на станции (маршрутах приема и отправления), выбор полезной части информации на Л осуществляют с участием ПГЛ;
переключение РПЛ с приема радиосигнала с поста ЭЦ станции отправления на прием информации радиосигнала с поста ЭЦ станции приема осуществляют в середине перегона, которую фиксирует ПГЛ. [Патент RU №2732181, МКП B61L 23/16. Способ регулирования движения поездов. Автор: Полевой Ю.И. БИ №26, 2020 г].
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является реализация способа регулирования движения скоростных поездов.
Способ регулирования движения скоростных поездов, заключается в том, что используют устройства радиосвязи, с помощью которых передают информацию (в прототипе: с поста электрической централизации ЭЦ) с линейного пункта управления ЛПУ (фиг. 2) на скоростной поезд СП о состоянии перегонных рельсовых цепей РЦ, расположенных (в прототипе; в зоне контроля ЗК, т.е. между станцией и серединой перегона) в зоне контроля участков приближения ЗКП и удаления ЗКУ, т.е. в зоне связи ЗС, а так же об участке, следующем за ЗС, т.е. об участке ЗКП, который находится в ЗС со следующим ЛПУ, номерах установленных маршрутах УМ (на фиг. 1-4 не показаны) и прогнозное время (в прототипе: приема/отправления поезда) проследования головой поезда следующего ЛПУ (фиг. 3), ЭВМ (в прототипе: ЭВМЛ) головного вагона (ЭВМА или ЭВМБ фиг. 4), на основании полученной информации и информации хранящейся в память о путевом развитии (станций и перегонов), плане и профиле пути всего участка следования СП, а также с учетом местонахождения СП, которое определяет приемник ГЛОНАСС (в прототипе: ПГЛ) ПГА совместно с ПГБ, рассчитывает длину свободного участка пути перед СП, определяют конфигурацию маршрута (с учетом марок стрелочных крестовин), оптимальную скорость движения поезда в любой точке пути (рассчитывают кривую скорости) и передают информацию о скорости на устройство регулирования скорость поезда УРСП (УСРПБ, УСРПБ), которое управляет поездным контроллером и краном машиниста, поддерживает оптимальную скорость движения СП;
контроль целостности рельсовых нитей РН (фиг. 2) осуществляют тональными рельсовыми цепями ТРЦ с помощью двухпроводной линии питания ЛП для осуществления пошаговой работы линейных распределителей ЛРС (РСЛ1, РСЛ2), и двухпроводной линии контроля ЛК для передачи информации о целостности РН на ЛПУ;
линии ЛП и ЛК укладывают от середины перегона до ЛПУ, к ЛП на посту ЛПУ подсоединяют источник питания ИП (ИПу, ИПп), а к ЛК -тональный путевой генератор Г (Гу, Гп); под управлением ЭВМ ИП (ИПу, ИПп) посылает в ЛТ серию импульсов (на фиг. 1-4 не представлены), между которыми следует интервал, выполняющий функцию сигнала цикловой синхронизации ЦС, импульсы разделены границами, где фаза сигнала изменяется на противоположную;
на границах рельсовых РЦ устанавливают путевые коробки с аппаратурой линейной точки ЛТ (ЛТ1, ЛТ2 на фиг. 2);
выходы линейных распределителей ЛРС (РСЛ1, РСЛ2) подсоединяют к электронному ключу ЭК так, чтобы можно было осуществлять циклический контроль состояний РЦ;
по ЛК циклически передают информацию на ЛПУ о целостности рельсовых нитей РН, при этом к ЛК посредством путевых трансформаторов ПТ (ПТ1, ПТ2) подсоединяют к середине РЛ, амплитуда сигнала указывает на исправность/неисправность РН;
на СП с ЛПУ передают информацию о целостности РН, находящихся в зоне связи ЗС (ЗКП и ЗКУ), и дополнительно - о РН следующего участка (ЗКУ впереди лежащей ЛПУ), кроме того, передают информацию о координатах головы и хвоста других СП;
передачу информации с ЛПУ на СП осуществляют с помощью РЛС (фиг. 2), прием информации на СП с ЛПУ - с помощью радиостанции РСА и РСБ (фиг. 4), выбор полезной части информации на СП осуществляют с участием ПГ (ПГА, ПГБ);
с каждого СП на ЛПУ (фиг. 1, 4) передают информацию о координатах головы и хвоста для контроля свободности путевых участков и контроля следования СП в полном составе;
переключение радиостанций РСА и РСБ с одного ЛПУ на другой осуществляют в середине перегона, которую фиксируют с помощью ПГ (фиг. 2 ПГБ, ПГА);
отличается тем, что на перегонах предусмотрены РЦ длиной 1800-2200 м (фиг. 2), через 48000-52000 м установлены ЛПУ (фиг. 1), РЦ осуществляют контроль целостности рельсовых нитей РН, на ЛПУ с помощью мобильных устройств СП (фиг. 4) определяют координаты головы и хвоста, находящиеся в ЗС (фиг. 1), и ЗКП к следующему ЛПУ, полученную информацию передают на СП находящиеся в ЗС, смежные ЛПУ обмениваются полученной информацией по оптоэлектронным кабелям, уложенным между ЛПУ;
контроль целостности РН осуществляют с помощью РЦ (фиг.2), к середине РЛ которых подключается Гу через резистор Ry, на выходе Гу с участием аналого-цифрового преобразователя АЦШу измеряют напряжение, с участием аналого-цифрового преобразователя АЦШу измеряется падение напряжения на резисторе Ry (сопротивление 1 Ом), информация об этих напряжениях передается на ЭВМ, которая определяет значение входного напряжения линии ЛП, а затем и целостность РЛ;
контроль свободности РЦ осуществляют с помощью мобильных приборов СК (фиг. 4) ПГА, ПГБ, ЭВМА, ЭВМБ, РСА, РСБ, приборов ЛПУ (фиг. 2) ЛРС, ЭВМ;
информация о состоянии путевых участков с помощью ЛРС (фиг.2), РСА, РСБ (фиг. 4) передается на ЭВМА, ЭВМБ, которые посредством УРСА, УРСБ регулируют скорость движения СП;
все электронно-вычислительные машины, радиостанции, приемники ГЛОНАСС имеют горячий резерв (на фиг. 1, 2, 3, 4 не представлены), а каждая электронно-вычислительные машины работает последовательно с двумя однотипными программами, результаты работы этих программ сравниваются, сравниваются и результаты работы основных и резервных электронно-вычислительных машин, при несовпадении результатов регулирование скорости СП осуществляется с помощью достоверной программы и исправной электронно-вычислительные машины под контролем машиниста до прибытия на конечную станцию;
прокладку скоростных железнодорожных путей целесообразно осуществлять в тоннелях мелкого заложения (на фиг. 1, 2, 3, 4 не представлены), проезд какого бы то ни было транспорта по крыши тоннеля необходимо исключить, использование тоннеля исключает занос железнодорожных путей снегом, затопление дождем, попадание человека и животных опасные зоны, т.е. способствует повышению безопасности движения и надежности действия перевозок на СП.
Краткое описание чертежей
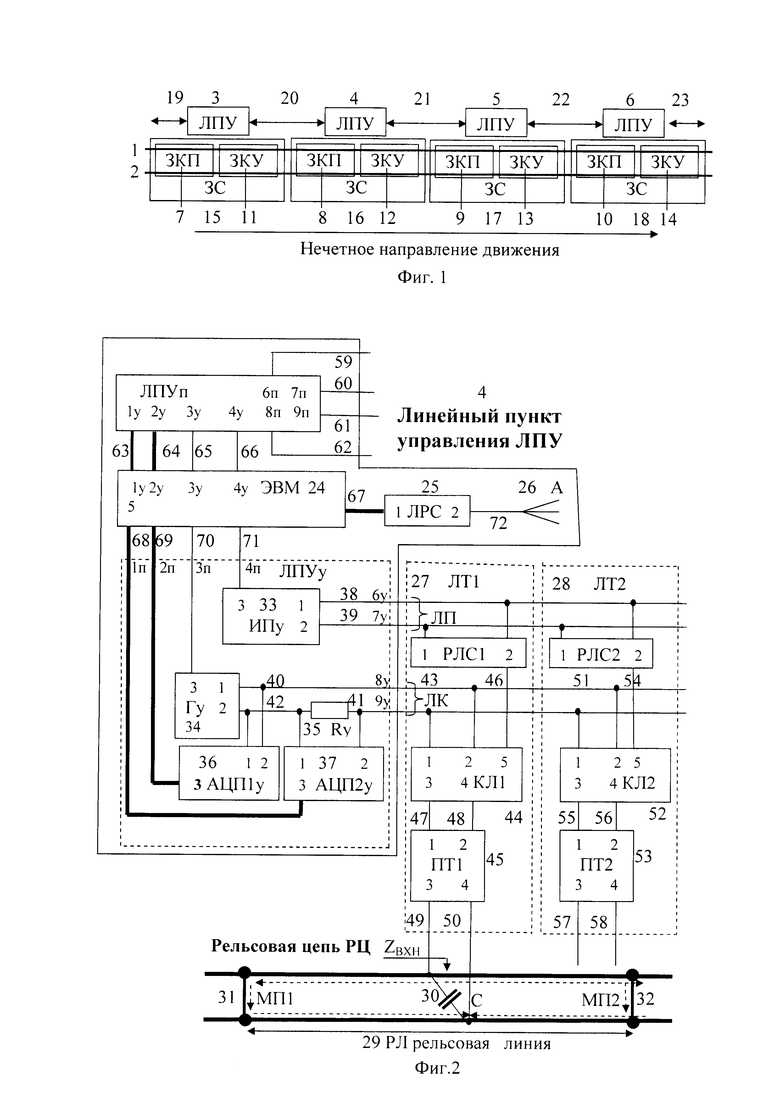
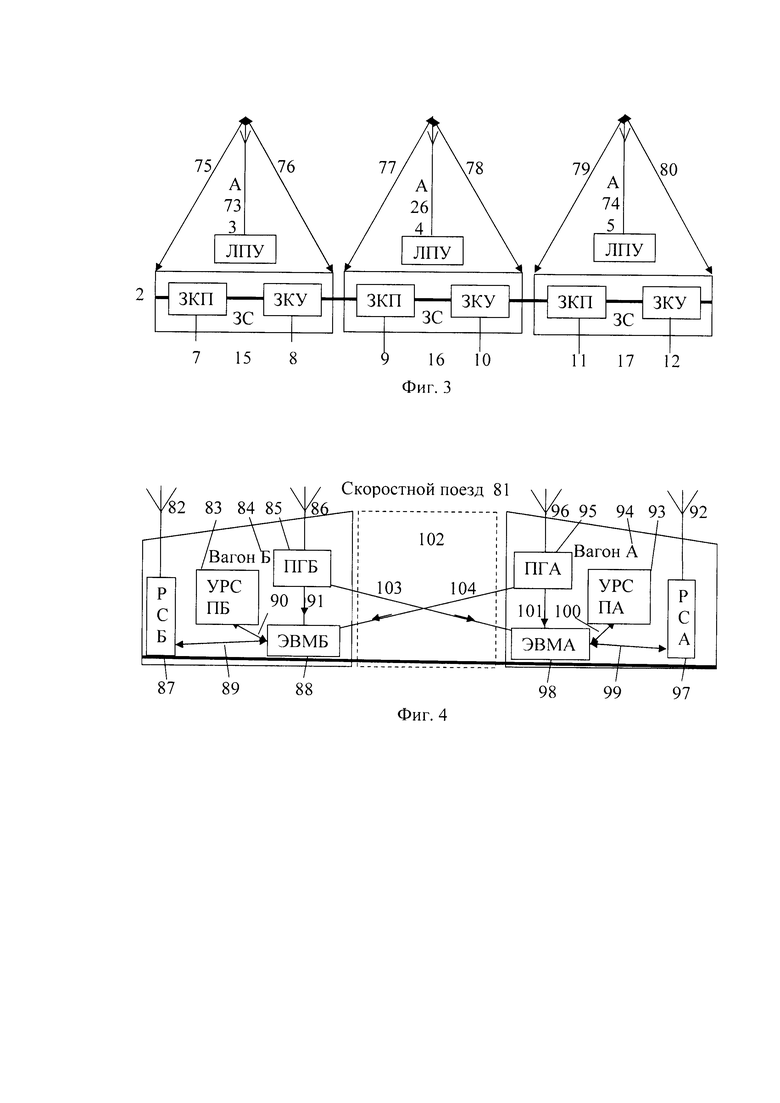
На фиг. 1 представлен двухниточный план перегона с расстановкой линейных пунктов управления ЛПУ, зон контроля приближения ЗПУ и удаления ЗКУ, зон связи ЗС; на фиг. 2 - схема соединения приборов ЛПУ, приборов линейных установок ЛУ и подключения к рельсовой линии РЛ; на фиг. 3 - однониточный план перегона с расстановкой ЛПУ, каналов связи радиостанций ЛПУ со скоростными поездами СП находящимися в ЗКП и ЗКУ; на фиг. 4 - схема соединения приборов ведения СП вагонов А и Б.
Описание изобретения
На фиг. 1-4 представлены следующие обозначения:
На фиг. 1 изображены:
1, 2 - первый и второй рельсы;
3, 4, 5, 6 - линейные пункты управления ЛПУ;
7, 8, 9, 10 - зоны контроля (участков) приближения ЗКП;
11, 12, 13, 14 - зоны контроля (участков) удаления ЗКУ;
15, 16, 17, 18 - зоны связи ЗС скоростных поездов с линейными пунктами управления;
19, 20, 21, 22, 23 - оптоэлектронные кабели между линейными пунктами; на фиг. 2 дополнительно показаны:
24 - электронно-вычислительная машина ЭВМ;
25 - линейная радиостанция ЛРС;
26 - антенна линейной радиостанция А;
27, 28 - первая и вторая линейные точки ЛТ;
29 - рельсовая линия РЛ длиной около 2000 м, (1800 - 2200 м);
30 - конденсатор С;
31 и 32 - первая и вторая междурельсовые перемычки МП1 и МП2;
33 - источник питания ИП для работы распределителей участков удаления ИПу;
34 - генератор Г для рельсовых цепей участков удаления Гу;
35 - резистор R для участков удаления Ry;
36, 37 - первый и второй аналого-цифровой преобразователи участков удаления АУШу, АЦП2у;
38, 39 - линии питания линейных точек ЛП;
40, 41 - линии контроля целостности рельсовых нитей ЛК;
42 - внутренняя связь линейном пункте управления;
43 - линейный распределитель первой линейной точки РЛС1;
44 - электронный ключ первой линейной точки КЛ1;
45 - путевой трансформатор первой линейной точки ПТ1;
46, 47, 48, 49, 50 - внутренняя связь первой линейной точки;
51 - линейный распределитель второй линейной точки РЛС2;
52 - электронный ключ второй линейной точки КЛ2;
53 - путевой трансформатор второй линейной точки ПТ2;
54, 55, 56, 57, 58 - внутренняя связь второй линейной точки;
59, 60, 61, 62 - линии связи между линейными пунктами управления и линейными точками приближения;
63, 64, 65, 66 - линии связи между линейным пунктом управления (первая половина ЛПУ) и электронно-вычислительной машиной;
67 - линия связи между электронно-вычислительной машиной и линейной радиостанцией;
68, 69, 70, 71 - линии связи между линейным пунктом управления (вторая половина ЛПУ) и электронно-вычислительной машиной;
72 - связь между антенной и линейной радиостанцией;
на фиг. 3 дополнительно показаны:
73, 74 - антенны линейных пунктов управления;
75, 76, 77, 78, 79, 80 - направления передачи информации между поездными радиостанциями и радиостанциями линейных пунктов управления;
на фиг. 4 дополнительно показаны:
81 - скоростной поезд СП;
82 - антенна радиостанции вагона Б;
83 - устройство регулирования скорости поезда в вагоне Б УРСПБ;
84 - вагон Б;
85 - приемник ГЛОНАСС ПГБ в вагоне Б;
86 - антенна приемника ГЛОНАСС вагона Б;
87 - радиостанция в вагоне Б РСБ;
88 - электронно-вычислительная машина в вагоне ЭВМБ Б;
89, 90, 91 - внутренняя связь между приборами вагона Б;
92 - антенна радиостанции вагона А;
93 -устройство регулирования скорости поезда в вагоне А УРСПА;
94 - вагон А;
95 - приемник ГЛОНАСС ПГА в вагоне А;
96 - антенна приемника ГЛОНАСС вагона А;
97 - радиостанция вагона А;
98 - электронно-вычислительная машина вагона А;
99, 100, 101 - внутренняя связь между приборами вагона А;
102 - промежуточные вагоны скоростного поезда;
103 - связь между приемником ГЛОНАС в вагоне Б и электронно-вычислительной машиной в вагоне ЭВМА А;
104 - связь между приемником ГЛОНАС ПГА вагона А и электронно-вычислительной машиной в вагоне ЭВМБ Б.
Действие способа регулирования движения скоростных поездов во многом совпадает с работой способа, выбранного в качестве прототипа. При этом, в ограничительной части формулы изобретения (стр. 3, 4) представлены узлы, функции которых совпадают с функциями узлов прототипа или очень похожи на них (в прототипе и изобретении одинаковые обозначения ЗС; в прототипе - ЗК, в изобретении - ЗКП и ЗПУ и др.), а также узлы, отличающиеся между собой количественными показателями (длина РЦ в прототипе составляет около 500 м, в изобретении - около 2000 м).
Основными отличиями является между прототипом и изобретением является то, что в изобретении на перегоне дополнительно установлены линейные пункты управления; рельсовые линии, а также поездные шунты не участвуют в определении координат местонахождения поезда (головы и хвоста). При высоких скоростях (300-500 км/ч) и сравнительно коротких поездах (200-400 м) велика вероятность потери шунта, особенно под хвостовой частью поезда.
На фиг. 1 представлены: 1,2 - первый и второй рельсы; 3, 4, 5, 6 - линейные пункты управления ЛПУ; 7, 8, 9, 10 - зоны контроля (участков) приближения ЗКП; 11, 12, 13, 14 - зоны контроля (участков) удаления ЗКУ; 15, 16, 17, 18 - зоны связи ЗС скоростных поездов с линейными пунктами управления; 19, 20, 21, 22, 23 - оптоэлектронные кабели между линейными пунктами.
На фиг. 2 дополнительно показаны: 24 - электронно-вычислительная машина ЭВМ; 25 - линейная радиостанция ЛРС; 26 - антенна линейной радиостанция А; 27, 28 - первая и вторая линейные точки ЛТ; 29 - рельсовая линия РЛ длиной около 2000 м, (1800-2200 м); 30 - конденсатор С; 31 и 32 - первая и вторая междурельсовые перемычки МП1 и МП2; 33 - источник питания ИП для работы распределителей участков удаления ИПу; 34 - генератор Г для рельсовых цепей участков удаления Гу; 35 - резистор R для участков удаления Ry; 36, 37 - первый и второй аналого-цифровой преобразователи участков удаления АУШу, АЦШу; 38, 39 - линии питания линейных точек ЛП; 40, 41 - линии контроля целостности рельсовых нитей ЛК; 42 - внутренняя связь линейном пункте управления; 43 - линейный распределитель первой линейной точки РЛС1; 44 - электронный ключ первой линейной точки КЛ1; 45 - путевой трансформатор первой линейной точки ПТ1; 46, 47, 48, 49, 50 - внутренняя связь первой линейной точки; 51 - линейный распределитель второй линейной точки РЛС2; 52 - электронный ключ второй линейной точки КЛ2; 53 - путевой трансформатор второй линейной точки ПТ2; 54, 55, 56, 57, 58 - внутренняя связь второй линейной точки; 59, 60, 61, 62 - линии связи между линейными пунктами управления и линейными точками приближения; 63, 64, 65, 66 - линии связи между линейным пунктом управления (первая половина ЛПУ) и электронно-вычислительной машиной; 67 - линия связи между электронно-вычислительной машиной и линейной радиостанцией; 68, 69, 70, 71 - линии связи между линейным пунктом управления (вторая половина ЛПУ) и электронно-вычислительной машиной; 72 - связь между антенной и линейной радиостанцией.
На фиг. 3 дополнительно показаны: 73, 74 - антенны линейных пунктов управления; 75, 76, 77, 78, 79, 80 - направления передачи информации между поездными радиостанциями и радиостанциями линейных пунктов управления.
На фиг. 4 дополнительно показаны: 81 - скоростной поезд СП; 82 - антенна радиостанции вагона Б; 83 - устройство регулирования скорости поезда в вагоне Б УРСПБ; 84 - вагон Б; 85 - приемник ГЛОНАСС ПГБ в вагоне Б; 86 - антенна приемника ГЛОНАСС вагона Б; 87 - радиостанция в вагоне Б РСБ; 88 - электронно-вычислительная машина в вагоне ЭВМБ Б; 89, 90, 91 - внутренние связи между приборами вагона Б; 92 - антенна радиостанции вагона А; 93 - устройство регулирования скорости поезда в вагоне А УРПА; 94 - вагон А; 95 - приемник ГЛОНАСС ПГА в вагоне А; 96 - антенна приемника ГЛОНАСС вагона А; 97 - радиостанция вагона А; 98 - электронно-вычислительная машина вагона А; 99, 100, 101 - внутренняя связь между приборами вагона А; 102 - промежуточные вагоны скоростного поезда; 103 - связь между приемником ГЛОНАС в вагоне Б и электронно-вычислительной машиной в вагоне ЭВМА А; 104 - связь между приемником ГЛОНАС ПГА вагона А и электронно-вычислительной машиной в вагоне ЭВМБ Б.
Способ регулирования движения скоростных поездов, заключается в том, что используются устройства радиосвязи, с помощью которых передают информацию с линейного пункта управления ЛПУ 4 (3-6) (фиг. 2) на скоростной поезд СП 81 (фиг. 4) о состоянии перегонных рельсовых цепей РЦ (фиг. 2), расположенных в зоне контроля участков приближения ЗКП 8 (7-10) (фиг. 1) и удаления ЗКУ 12 (11-14) т.е. в зоне связи ЗС 16 (15-18), а так же об участке, следующем за ЗС 16, т.е. об участке ЗКП 9, который находится в ЗС 17 со следующим ЛПУ5, номерах установленных маршрутах УМ (на фиг. 1-4 не показаны) и прогнозное время проследования головой поезда следующего ЛПУ 5, ЭВМ головного вагона (ЭВМА 98 или ЭВМБ 88 фиг. 4), на основании полученной информации и информации хранящейся в память о путевом развитии (станций и перегонов), плане и профиле пути всего участка следования СП, а также с учетом местонахождения СП 81, которое определяет приемник ГЛОНАСС ПГА 95 совместно с ПГБ 85, рассчитывает длину свободного участка пути перед СП 81, определяют конфигурацию маршрута (с учетом марок стрелочных крестовин), оптимальную скорость движения поезда в любой точке пути (рассчитывают кривую скорости) и передают информацию о скорости на устройство регулирования скорость поезда УРСП (УСРПА 93, УСРПБ 83), которое управляет поездным контроллером и краном машиниста, поддерживает оптимальную скорость движения СП 81.
Контроль целостности рельсовых нитей РН (фиг.2) осуществляют тональными рельсовыми 43 цепями ТРЦ с помощью двухпроводной линии питания ЛП 27 для осуществления пошаговой работы линейных распределителей ЛРС (РСЛ1 43, РСЛ2 51), и двухпроводной линии контроля ЛК 43 для передачи информации о целостности РН на ЛПУ 4.
Линии ЛП 27 и ЛК 43 укладывают от середины перегона до ЛПУ 4, к ЛП 27 на посту ЛПУ 4 подсоединяют источник питания ИП (ИПу 33, ИПп), а к ЛК 43 - тональный путевой генератор Г (Гу 34, Гп); под управлением ЭВМ 24 ИП (ИПу 33, ИПп) посылает в ЛТ 27 (28) серию импульсов (на фиг. 1-4 не представлены), между которыми следует интервал, выполняющий функцию сигнала цикловой синхронизации ЦС, импульсы разделены границами, где фаза сигнала изменяется на противоположную.
На границах рельсовых РЦ устанавливают путевые коробки с аппаратурой линейной точки ЛТ (ЛТ1 27, ЛТ2 28 на фиг. 2). Выходы линейных распределителей ЛРС (РСЛ1 43, РСЛ2 51) подсоединяют к электронному ключу КЛ 44 так, чтобы можно было осуществлять циклический контроль состояний РЦ.
По ЛК 43 циклически передают информацию на ЛПУ 4 о целостности рельсовых нитей РН, при этом к ЛК 43 посредством путевых трансформаторов ПТ (ПТ1 45, ПТ2 53) подсоединяют к середине РЛ 29, амплитуда сигнала указывает на исправность/неисправность РН.
На СП 81 (фиг. 4) с ЛПУ 4 (фиг. 2) передают информацию о целостности РН, находящихся в зоне связи ЗС 16 (ЗКП 8 и ЗКУ 12), и дополнительно - о РН следующего участка (ЗКУ 9 впереди лежащей ЛПУ 5), кроме того, передают информацию о координатах головы и хвоста других СП 81.
Передачу информации с ЛПУ 4 (фиг. 2) на СП 81 (фиг. 4) осуществляют с помощью РЛС (фиг. 2), прием информации на СП 81 (фиг. 4) с ЛПУ 4 - с помощью радиостанции РСА 97 и РСБ 87 (фиг. 4), выбор полезной части информации на СК 81 (фиг. 4) осуществляют с участием ПГ (ПГА 95, ПГБ 86). С каждого СП на ЛПУ (фиг. 1, 4) передают информацию о координатах головы и хвоста для контроля свободности путевых участков и контроля следования СП в полном составе.
Переключение радиостанций РСА 97 и РСБ 87 (фиг. 4) с одного ЛПУ (фиг. 1) на другой осуществляют в середине перегона, которую фиксируют с помощью ПГ (фиг. 4 ПГБ 86, ПГА 95).
На перегонах предусмотрены РЦ длиной 1800-2200 м (фиг.2), через 48000-52000 м установлены ЛПУ (фиг. 1), РЦ осуществляют контроль целостности рельсовых нитей РН, на ЛПУ с помощью мобильных устройств СП (фиг. 4) определяют координаты головы и хвоста, находящиеся в ЗС (фиг. 1), и ЗКП к следующему ЛПУ, полученную информацию передают на СП находящиеся в ЗС, смежные ЛПУ обмениваются полученной информацией по оптоэлектронным кабелям, уложенным между ЛПУ.
Контроль целостности РН осуществляют с помощью РЦ (фиг. 2), к середине РЛ которых подключается Гу 34 через резистор Ry 35, на выходе Гу 34 с участием аналого-цифрового преобразователя АЦШу 36 измеряют напряжение, с участием аналого-цифрового преобразователя АЦШу 37 измеряется падение напряжения на резисторе Ry 35 (сопротивление 1 Ом), информация об этих напряжениях передается на ЭВМ 24, которая определяет значение входного напряжения линии ЛП 4, а затем и целостность РЛ.
Контроль свободности РЦ осуществляют с помощью мобильных приборов СП (фиг. 4) ПГА 95, ПГБ 86, ЭВМА 98, ЭВМБ 88, РСА 97, РСБ 87, приборов ЛПУ 4 (фиг. 2) ЛРС 25, ЭВМ 24.
Информация о состоянии путевых участков с помощью ЛРС 4 (фиг. 2), РСА 97, РСБ 87 (фиг. 4) передается на ЭВМА 98, ЭВМБ 88, которые посредством УРСПА 93, УРСПБ 83 регулируют скорость движения СП.
Все электронно-вычислительные машины, радиостанции, приемники ГЛОНАСС имеют горячий резерв (на фиг. 1, 2, 3, 4 не представлены), а каждая электронно-вычислительные машины работает последовательно с двумя однотипными программами, результаты работы этих программ сравниваются, сравниваются и результаты работы основных и резервных электронно-вычислительных машин, при несовпадении результатов регулирование скорости СП осуществляется с помощью достоверной программы и исправной электронно-вычислительные машины под контролем машиниста до прибытия на конечную станцию.
Прокладку скоростных железнодорожных путей можно осуществлять обычным способом с ограждением заборам скоростных железнодорожных путей забором, но целесообразнее осуществлять в тоннелях мелкого заложения (на фиг. 1, 2, 3, 4 не представлены), проезд каких бы то ни было транспортных средств по крыши тоннеля недопустим, использование тоннеля исключает занос железнодорожных путей снегом, затопление дождем, попадание человека и животных в опасные зоны, т.е. способствует повышению безопасности движения и надежности действия перевозок на СП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ РЕЛЬСОВЫХ ЦЕПЕЙ НА СКОРОСТНЫЕ ПОЕЗДА | 2022 |
|
RU2781704C1 |
| УСТРОЙСТВО РЕЗЕРВНОГО КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВЫХ УЧАСТКОВ | 2020 |
|
RU2751830C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПАКЕТНЫХ ПОЕЗДОВ | 2022 |
|
RU2781700C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2770034C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2732181C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ДЛИННОСОСТАВНЫХ ПОЕЗДОВ | 2022 |
|
RU2781702C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ СТАНЦИОННЫХ РЕЛЬСОВЫХ ЦЕПЕЙ | 2020 |
|
RU2751922C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ ПЕРЕГОННЫХ РЕЛЬСОВЫХ ЦЕПЕЙ | 2021 |
|
RU2770031C1 |
| УСТРОЙСТВО РЕЗЕРВИРОВАНИЯ СИСТЕМЫ КОНТРОЛЯ СОСТОЯНИЙ РЕЛЬСОВЫХ ЛИНИЙ | 2021 |
|
RU2775033C1 |
Способ регулирования движения скоростных поездов заключается в том, что используются устройства радиосвязи, с помощью которых передают информацию с линейного пункта управления на скоростной поезд о состоянии перегонных рельсовых цепей, расположенных в зоне связи, а также об участке, следующем за зоной связи, номерах установленных маршрутов и прогнозное время проследования головой поезда следующего линейного пункта управления. На перегонах предусмотрены рельсовые цепи длиной 1800-2200 м, через 48000-52000 м установлены линейные пункты управления. Они осуществляют контроль целостности рельсовых нитей, на линейные пункты управления с помощью мобильных устройств определяют координаты головы и хвоста, находящиеся в зоне контроля. Все задействованные ЭВМ, радиостанции, приемники ГЛОНАСС имеют горячий резерв, а каждая ЭВМ работает последовательно с двумя однотипными программами, результаты работы этих программ сравниваются, сравниваются и результаты работы основных и резервных электронно-вычислительных машин, при несовпадении результатов регулирование скорости скоростного поезда осуществляется с помощью достоверной программы и исправной ЭВМ под контролем машиниста до прибытия на конечную станцию. Достигается реализация способа регулирования движения скоростных поездов. 4 ил.
Способ регулирования движения скоростных поездов заключается в том, что используются устройства радиосвязи, с помощью которых передают информацию с линейного пункта управления ЛПУ на скоростной поезд СП о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля участков приближения ЗКП и удаления ЗКУ, т.е. в зоне связи ЗС, а также об участке, следующем за ЗС, т.е. об участке ЗКП, который находится в ЗС со следующим ЛПУ, номерах установленных маршрутов УМ и прогнозное время проследования головой поезда следующего ЛПУ, ЭВМ головного вагона, на основании полученной информации и информации, хранящейся в памяти о путевом развитии, плане и профиле пути всего участка следования СП, а также с учетом местонахождения СП, которое определяет приемник ГЛОНАСС ПГ А совместно с ПГ Б, рассчитывает длину свободного участка пути перед СП, определяют конфигурацию маршрута, оптимальную скорость движения поезда в любой точке пути и передают информацию о скорости на устройство регулирования скорости поезда УРС, которое управляет поездным контроллером и краном машиниста, поддерживает оптимальную скорость движения СП;
контроль целостности рельсовых нитей РН осуществляют тональными рельсовыми цепями ТРЦ с помощью двухпроводной линии питания ЛП для осуществления пошаговой работы линейных распределителей ЛРС и двухпроводной линии контроля ЛК для передачи информации о целостности РН на ЛПУ;
линии ЛП и ЛК укладывают от середины перегона до ЛПУ, к ЛП на посту ЛПУ подсоединяют источник питания ИП, а к ЛК - тональный путевой генератор Г; под управлением ЭВМ ИП посылает в ЛТ серию импульсов, между которыми следует интервал, выполняющий функцию сигнала цикловой синхронизации ЦС, импульсы разделены границами, где фаза сигнала изменяется на противоположную;
на границах рельсовых РЦ устанавливают путевые коробки с аппаратурой линейной точки ЛТ;
выходы линейных распределителей ЛРС подсоединяют к электронному ключу ЭК так, чтобы можно было осуществлять циклический контроль состояний РЦ;
по ЛК циклически передают информацию на ЛПУ о целостности рельсовых нитей РН, при этом к ЛК посредством путевых трансформаторов ПТ подсоединяют к середине рельсовой линии РЛ, амплитуда сигнала указывает на исправность/неисправность РН;
на СП с ЛПУ передают информацию о целостности РН, находящихся в зоне связи ЗС, и дополнительно - о РН следующего участка, кроме того, передают информацию о координатах головы и хвоста других СП;
передачу информации с ЛПУ на СП осуществляют с помощью РЛС, прием информации на СП с ЛПУ - с помощью радиостанции РС А и РС Б, выбор полезной части информации на СП осуществляют с участием ПГ;
с каждого СП на ЛПУ передают информацию о координатах головы и хвоста для контроля свободности путевых участков и контроля следования СП в полном составе;
переключение радиостанций РС А и РС Б с одного ЛПУ на другой осуществляют в середине перегона, которую фиксируют с помощью ПГ;
отличающийся тем, что на перегонах предусмотрены РЦ длиной 1800-2200 м, через 48000-52000 м установлены ЛПУ, РЦ осуществляют контроль целостности рельсовых нитей РН, на ЛПУ с помощью мобильных устройств СП определяют координаты головы и хвоста, находящиеся в ЗС, и ЗКП к следующему ЛПУ, полученную информацию передают на СП, находящиеся в ЗС, смежные ЛПУ обмениваются полученной информацией по оптоэлектронным кабелям, уложенным между ЛПУ;
контроль целостности РН осуществляют с помощью РЦ, к середине РЛ которых подключается генератор Гу рельсовых цепей участков удаления через резистор Ry, на выходе Гу с участием аналого-цифрового преобразователя АЦП1у измеряется напряжение, с участием аналого-цифрового преобразователя АЦП2у измеряют падение напряжения на резисторе Ry с сопротивлением 1 Ом, информация об этих напряжениях передается на ЭВМ, которая определяет значение входного напряжения линии ЛП, а затем и целостность РЛ;
контроль свободности РЦ осуществляют с помощью мобильных приборов СП ПГА, ПГБ, ЭВМ А, ЭВМ Б, РС А, РС Б, приборов ЛПУ ЛРС, ЭВМ;
информация о состоянии путевых участков с помощью ЛРС, РС А, РС Б передается на ЭВМ А, ЭВМ Б, которые посредством УРС А, УРС Б регулируют скорость движения СП;
все электронно-вычислительные машины, радиостанции, приемники ГЛОНАСС имеют горячий резерв, а каждая электронно-вычислительная машина работает последовательно с двумя однотипными программами, результаты работы этих программ сравниваются, сравниваются и результаты работы основных и резервных электронно-вычислительных машин, при несовпадении результатов регулирование скорости СП осуществляется с помощью достоверной программы и исправной электронно-вычислительные машины под контролем машиниста до прибытия на конечную станцию;
прокладку скоростных железнодорожных путей можно осуществлять обычным способом с ограждением заборам скоростных железнодорожных путей, но целесообразнее осуществлять в тоннелях мелкого заложения, проезд какого бы то ни было транспорта по крыше тоннеля необходимо исключить, использование тоннеля исключает занос железнодорожных путей снегом, затопление дождем, попадание человека и животных в опасные зоны, т.е. способствует повышению безопасности движения и надежности действия перевозок на СП.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ ПО СООТНОШЕНИЮ ЗНАЧЕНИЙ ТОКОВ В РЕЛЬСАХ | 2019 |
|
RU2706607C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |

