ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к устройству обработки энергией, в частности к использованию ультразвуковых преобразователей для высокоинтенсивного фокусированного ультразвука.
УРОВЕНЬ ТЕХНИКИ
При недавних достижениях в медицинской визуализации и ультразвуковой технологии, повысился интерес к абляции опухолей высокоинтенсивным фокусированным ультразвуком (HIFU). Абляция опухоли выполняется посредством нагревания объемов внутри опухоли до тех пор, пока не будет достигнута накопленная тепловая доза. Вследствие этого, надежный контроль температуры в реальном времени с помощью сканера магнитно-резонансной визуализации (MRI) необходим, чтобы гарантировать достаточный тепловой некроз для цели, в то же время избегая чрезмерного нагревания и повреждения окружающих здоровых тканей.
US 2012/0053448 A1 раскрывает способ для регулирования плоскости сканирования в зависимости от формы интервенционного инструмента.
В патентной заявке США US2012/0070058 говорится о предоставлении общего базового термографического изображения, которое выступает в качестве общего образца для разных положений плоскостей среза, в которых должна быть определена температура. Для этого терапевтическая HIFU-система с направлением посредством MR-изображения сконфигурирована с возможностью применения нескольких статичных поперечных плоскостей изображения, из которых интерполируют базовые наборы данных в дополнительных плоскостях изображения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления данного изобретения могут предусматривать медицинское устройство, компьютерный программный продукт и способ управления медицинским устройством в независимых пунктах формулы изобретения. Варианты осуществления даны в зависимых пунктах формулы изобретения.
"Компьютерная память" или "память" является примером машиночитаемого носителя информации. Компьютерной памятью является любая память, которая напрямую доступна процессору. Примеры компьютерной памяти включают в себя, но не ограничены этим: RAM-память, регистраторы и файлы регистраторов.
"Компьютерный накопитель" или "накопитель" является примером машиночитаемого носителя информации. Компьютерным накопителем является любой энергонезависимый машиночитаемый носитель информации. Примеры компьютерного накопителя включают в себя, но не ограничиваются этим: накопитель на жестком магнитном диске, накопитель для порта USB, гибкий магнитный диск, смарт-карту, DVD, CD-ROM и твердотельный жесткий диск. В некоторых вариантах осуществления компьютерным накопителем может также быть компьютерная память или наоборот.
"Процессор", как используется в настоящем документе, охватывает электронный компонент, который способен исполнять программу или исполняемую машиной инструкцию. Вычислительное устройство, содержащее "процессор", должно рассматриваться как возможно содержащее более, чем один процессор. Процессор может, например, быть многоядерным процессором. Процессор может также относиться к группе процессоров внутри единой компьютерной системы или распределен среди многочисленных компьютерных систем. Термин "вычислительное устройство" должно рассматриваться как возможно относящееся к группе или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Инструкции многих программ выполнены множественными процессорами, которые могут быть внутри одного и того же вычислительного устройства или которые могут быть равномерно распределены среди многочисленных вычислительных устройств.
"Пользовательский интерфейс", как использовано в настоящем документе, является интерфейсом, который обеспечивает пользователю или оператору возможность взаимодействия с компьютером или компьютерной системой. "Пользовательский интерфейс" может также называться "устройством с человеко-машинным интерфейсом" Пользовательский интерфейс может предоставить информацию или данные оператору и/или принять информацию или данные от оператора. Пользовательский интерфейс может обеспечить возможность ввода от оператора, который должен быть принят компьютером, и может обеспечить вывод пользователю из компьютера. Другими словами, пользовательский интерфейс может обеспечить оператору возможность управления или манипулирования компьютером, и интерфейс обеспечить компьютеру возможность указания эффектов управления или манипулирования оператора. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером предоставления информации оператору. Прием данных посредством клавиатуры, мыши, шарового манипулятора, сенсорной панели, ручки указательного устройства, графического планшета, джойстика, игрового джойстика, веб-камеры, гарнитуры, рычага переключения передач, рулевого колеса, педалей, проводной перчатки, панели для танцев, пульта дистанционного управления и акселерометра являются примерами компонентов пользовательского интерфейса, который обеспечивает возможность приема информации или данных от оператора.
"Аппаратный интерфейс", как используется в настоящем документе, охватывает интерфейс, который обеспечивает процессору компьютерной системы возможность взаимодействия с и/или управления внешним вычислительным устройством и/или устройством. Аппаратный интерфейс может обеспечить процессору возможность отправки сигналов управления или инструкций на внешнее вычислительное устройство и/или устройство. Аппаратный интерфейс может также обеспечить процессору возможность обмена данными с внешним вычислительным устройством и/или устройством. Примеры аппаратного интерфейса включают в себя, но не ограничены этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, Bluetooth-соединение, соединение по беспроводной локальной сети, TCP/IP-соединение, Ethernet-соединение, интерфейс управления напряжением, MIDI-интерфейс, интерфейс аналогового ввода и интерфейс цифрового ввода.
"Дисплей" или "устройство отображения", как используется в настоящем документе, охватывает устройство вывода или пользовательский интерфейс, адаптированный для отображения изображений или данных. Дисплей может выводить визуальные, аудио и/или тактильные данные. Примеры дисплея включают в себя, но не ограничены этим: компьютерный монитор, телевизионный экран, воспринимающий касания экран, тактильный электронный дисплей, экран Брайля, катодно-лучевую трубку (CRT), запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный люминесцентный дисплей (VF), дисплеи на светоизлучающих диодах (LED), электролюминесцентный дисплей (ELD), плазменные отображающие панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светоизлучающих диодах (OLED), проектор и головной дисплей.
Данные магнитно-резонансного изображения определяются в настоящем документе как записанные измерения радиочастотных сигналов, испущенных спинами атомов, посредством антенны магнитно-резонансного устройства во время сканирования при магнитно-резонансной визуализации. Изображение магнитно-резонансной визуализации (MRI) определяется в настоящем документе как реконструированная двух или трехмерная визуализация анатомических данных, содержащихся внутри данных магнитно-резонансной визуализации. Эта визуализация может быть выполнена с использованием компьютера.
Данные магнитного резонанса могут содержать измерения радиочастотных сигналов, испущенных спинами атомов, посредством антенны магнитно-резонансного устройства во время сканирования при магнитно-резонансной визуализации, которые содержат информацию, которая может быть использована для магнитно-резонансной термометрии. Магнитно-резонансная термометрия функционирует посредством измерения изменений чувствительных к температуре параметров. Примерами параметров, которые могут быть измерены во время магнитно-резонансной термометрии, являются: сдвиг частоты резонанса протонов, коэффициент диффузии, или изменения времени T1 и/или T2 релаксации могут быть использованы для измерения температуры с использованием магнитного резонанса. Сдвиг частоты резонанса протонов зависит от температуры, так как магнитное поле, воздействие которого испытывают отдельные протоны, атомы водорода, зависит от окружающей молекулярной структуры. Увеличение температуры ослабляет молекулярный скрининг из-за воздействия температуры на водородные связи. Это приводит к температурной зависимости частоты резонанса протонов.
Протонная плотность линейно зависит от равновесия намагниченности. Вследствие этого возможно определить изменения температуры с использованием изображений, взвешенных по протонной плотности.
Время T1, T2 и T2 со звездочкой (иногда записанное как T2*) релаксации также является зависимым от температуры. Реконструкция изображений, взвешенных по T1, T2 и T2-со звездочкой, может вследствие этого быть использована для построения тепловых или температурных карт.
Температура также воздействует на броуновское движение молекул в водном растворе. Вследствие этого, последовательности импульсов, которые позволяют измерять коэффициенты диффузии, такие как импульсное диффузное градиентное спин-эхо, могут быть использованы для измерения температуры.
Один из наиболее полезных способов измерения температуры с использованием магнитного резонанса осуществляется посредством измерения сдвига частоты резонанса протонов (PRF) для протонов воды. Частота резонанса протонов является зависимой от температуры. По мере изменения температуры в вокселе, сдвиг частоты будет вызывать изменение измеренной фазы протонов воды. Вследствие этого, может быть определено изменение температуры между изображениями двух фаз. Этот способ определения температуры имеет преимущество в том, что он является относительно быстрым по сравнению с другими способами. PRF-способ в настоящем документе рассматривается более подробно, чем другие способы. Однако, способы и методы, рассмотренные в настоящем документе, также применимы к другим способам выполнения термометрии с помощью магнитно-резонансной визуализации.
Спектроскопические данные магнитного резонанса определяются в настоящем документе как записанные измерения радиочастотных сигналов, испущенных спинами атомов, посредством антенны магнитно-резонансного устройства во время сканирования при магнитно-резонансной визуализации, которые содержат информацию, которая описывает многочисленные резонансные пики.
Спектроскопические данные магнитного резонанса могут, например, быть использованы для выполнения способа построения температурных карт на основе фотонной спектроскопической (PS) визуализации, который может производить температурные карты с абсолютной шкалой. Эта температурная карта с абсолютной шкалой может вследствие этого быть использована для выполнения температурной калибровки. Этот способ полагается на физические принципы температурной зависимости сдвига частоты резонанса протонов воды в качестве способа частоты резонанса протонов, но способ получения отличается: сдвиг частоты вычисляется из спектра магнитного резонанса. Сдвиг вычисляется из разности положений пика протонов воды и опорного пика протонов. Протоны в липидах могут, например, быть использованы как опорные, так как их частота резонанса известна как наиболее независимая от температуры, тогда как пик протонов воды имеет линейную зависимость от температуры. Это может быть сделано в вокселях, где присутствуют оба типа тканей. Если вода и липиды не существуют в одном вокселе, можно попробовать использовать в качестве опорных некоторые другие типы тканей, чем липиды. Если не удалось, могут быть несколько вокселей, где опорные пики, и вследствие этого данные температуры, не доступны. Интерполяция и/или температурная фильтрация могут быть использованы для помощи в этих ситуациях, так как обычно не ожидается быстрое изменение температуры в пространственном отношении при повышении сильно локализованной температуры, обычно вызванным тепловой терапией, что является очевидным исключением. Использование опорных пиков делает способ относительно независимым от дрейфа поля или движением между сканированиями. Так как сканирование занимает время по меньшей мере в порядке одной минуты при текущих способах, PS-способ чувствителен к движению во время сканирования или изменению температуры во время сканирования. В случае, когда температура постоянна, или вариация температуры небольшая как во времени, так и пространстве, способ позволяет произвести полезную информацию. Например, с помощью высокоинтенсивного фокусированного ультразвука, направленного с помощью магнитного резонанса (MR-HIFU), PS-способ может быть использован для предоставления актуального распределения температуры тела до начала MR-HIFU или другой температурной обработки в отличие от использования пространственно однородной начальной температуры, взятой за внутреннюю температуру тела, измеренную с помощью температурного зонда. В качестве альтернативы, PS-способ может быть использован в качестве проверки работоспособности на предмет накопленной температуры между обработками, нагревая внешнюю зону обработки.
Также могут быть использованы другие способы визуализации, если энергетическая обработка не оказывает заметного воздействия на температуру объема энергетической обработки. Например, некроз тканей из-за повреждения облучением или нацеленного высвобождения лекарства может проявиться на MR-изображениях перфузии или диффузии. Также, концентрация кислорода может быть измерена для оценки эффективности и предоставления обратной связи терапии.
Термин "тепловая доза", как используется в настоящем документе, относится к накопленному повреждению для клеток ткани, нанесенному нагреванием.
Термин "элемент преобразователя" относится к одиночному излучающему ультразвуковому элементу в преобразователе, содержащем много независимо управляемых элементов.
В одном аспекте, данное изобретение относится к медицинскому устройству, содержащему модуль магнитно-резонансной визуализации для получения данных магнитного резонанса из ядер субъекта размещенного внутри визуализируемого объема; терапевтическое устройство, содержащее устройство доставки энергии для доставки энергии в целевой объем внутри визуализируемого объема, причем терапевтическое устройство выполнено с возможностью вращения вокруг продольной оси терапевтического устройства; систему позиционирования для вращения терапевтического устройства; память для хранения исполняемых машиной инструкций; и процессор для управления медицинским устройством.
Исполнение исполняемых машиной инструкций предписывает процессору принимать данные размещения, указывающие размещение целевого объема. Размещение целевого объема может представлять собой координаты целевого объема по отношению к опорному кадру MRI-модуля. Исполнение исполняемых машиной инструкций дополнительно предписывает процессору управлять системой позиционирования для вращения терапевтического устройства вокруг продольной оси. Вращение может быть автоматическим или ручным. Это может иметь преимущество точного позиционирования катетера по траектории вращения вокруг продольной оси. Исполнение исполняемых машиной инструкций дополнительно предписывает процессору управлять устройством доставки энергии для доставки энергии в целевой объем в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения. Исполнение исполняемых машиной инструкций дополнительно предписывает процессору определить первый набор плоскостей среза целевого объема в первом положении вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации. Исполнение исполняемых машиной инструкций дополнительно предписывает процессору управлять модулем магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза. Реконструированное изображение из первых данных магнитного резонанса из конкретного среза обычно представляется как двухмерных график или поле. Исполнение исполняемых машиной инструкций дополнительно предписывает процессору определить второй набор плоскостей среза целевого объема по меньшей мере в одном втором положении вращения по траектории вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации; и управлять модулем магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза.
Вышеуказанные признаки предоставляют в дополнение к данным, полученным из фиксированных плоскостей среза (в фиксированном положении терапевтического устройства), данные из вращающихся плоскостей среза, расположенных в разных положениях вращения по траектории вращения терапевтического устройства. То есть полученные данные покрывают большой 3D объем. Преимущество состоит в том, что этот способ менее затратный по времени по сравнению с обыкновенными способами. В действительности, чтобы покрыть большой 3D объем в области, представляющей интерес, эти обыкновенные способы с фиксированными плоскостями среза требуют расширенного поля обзора плоскости среза для того, чтобы получить данные за пределами элементов преобразователя, что занимает длительное время и замедляет систему сбора данных. Способы фиксированных плоскостей среза также требуют больше срезов и небольшой толщины срезов для обеспечения равного разрешения вдоль продольной оси.
Согласно одному варианту осуществления, терапевтическое устройство содержит катетер, при этом устройство доставки энергии содержит ультразвуковой преобразователь, при этом ультразвуковой преобразователь является линейной фазированной решеткой, вмонтированной в дистальный конец катетера, при этом доставка энергии в целевой объем содержит нагревание целевого объема, при этом первые данные магнитного резонанса содержат первые термометрические данные магнитного резонанса, при этом вторые данные магнитного резонанса содержат вторые термометрические данные магнитного резонанса. Нагревание целевого объема может быть сделано, например, посредством возбуждения (или регулирования) элементов преобразователя ультразвукового преобразователя для выборочной фокусировки пучка ультразвуковой энергии из ультразвукового преобразователя в целевой объем. Это может также быть сделано, например, посредством возбуждения (или регулирования) элементов преобразователя ультразвукового преобразователя для выборочного включения несфокусированного пучка ультразвуковой энергии из ультразвукового преобразователя в целевой объем.
Преимущество состоит в том, что построение температурной карты в целевом объеме является точным благодаря повышенному разрешению, что гарантирует, что тепловая доза достигнута должным образом.
Терапевтическое устройство может содержать лазерное термотерапевтическое устройство.
Терапевтическое устройство может также содержать микроволновое и/или радиочастотное термотерапевтическое устройство.
Терапевтическое устройство может также содержать внешний вращающийся портал с линейным ускорителем.
Согласно одному варианту осуществления, медицинское устройство дополнительно содержит градиентную катушку, радиочастотную катушку и устройства управления катушкой, при этом управление модулем магнитно-резонансной визуализации для получения вторых данных магнитного резонанса содержит управление устройствами управления катушкой для получения градиентной катушки, чтобы сгенерировать соответствующее первое магнитное градиентное поле, и для получения радиочастотной катушки, чтобы сгенерировать соответствующее первое радиочастотное поле для каждого из второго набора плоскостей среза в соответствии со вторым положением вращения.
Согласно одному варианту осуществления, управление модулем магнитно-резонансной визуализации для получения первых данных магнитного резонанса содержит управление устройствами управления катушкой для получения градиентной катушки, чтобы сгенерировать соответствующее второе магнитное градиентное поле, и для получения радиочастотной катушки, чтобы сгенерировать соответствующее второе радиочастотное поле для каждого из первого набора плоскостей среза в соответствии с первым положением вращения.
Градиентные катушки используются, чтобы произвести вариации в основном магнитном поле (B0) модуля магнитно-резонансной визуализации, так же как и радиочастотные (РЧ) катушки используются, чтобы произвести модификацию радиочастотного импульса для того, чтобы локализовать и произвести плоскость среза в соответствии с первым и/или вторым положением вращения. Это может быть предпочтительным, так как обеспечивается точное позиционирование плоскости среза и генерируется радиочастотный сигнал возбуждения, который только направляет желаемые спины в плоскость среза.
Согласно одному варианту осуществления, исполнение исполняемых машиной инструкций дополнительно предписывает процессору управлять устройствами управления катушкой для получения градиентной и РЧ катушек, чтобы динамически изменять поле обзора в дополнение к положению первой и второй плоскостей среза во время терапии. Это может быть предпочтительным, так как это может быть использовано, чтобы детализировать критическую структуру для более точного определения дозы, или чтобы проверить нежелательное нагревание за пределами обычного поля обзора.
Согласно одному варианту осуществления, исполнение исполняемых машиной инструкций дополнительно предписывает процессору получить вторые термометрические данные магнитного резонанса и вторые морфологические данные магнитного резонанса из второго набора плоскостей среза с помощью последовательности чередующихся импульсов.
Согласно одному варианту осуществления, исполнение исполняемых машиной инструкций дополнительно предписывает процессору получить первые термометрические данные магнитного резонанса и первые морфологические данные магнитного резонанса из первого набора плоскостей среза с помощью последовательности чередующихся импульсов.
Морфологическими данными могут быть данные диагностического изображения с клинически высоким качеством для визуализации целевого объема. Термометрические данные магнитного резонанса могут быть произведены с высоким временным разрешением по сравнению с морфологическими данными магнитного резонанса, или термометрические данные магнитного резонанса могут быть произведены с помощью разных методов, которые имеют разные требования по времени. Реконструированное изображение из термометрических данных магнитного резонанса может быть наложено на реконструированное изображение из морфологических данных магнитного резонанса. Это полезно тем, что чередующиеся данные предоставляют данные с высоким пространственным разрешением для точного определения распределения температуры и данные с высоким временным разрешением для отслеживания изменений (например, увеличения) температуры.
Согласно одному варианту осуществления, исполнение исполняемых машиной инструкций дополнительно предписывает процессору одновременно получать первые и вторые данные магнитного резонанса. То есть данные получаются за короткий период времени и покрывают большой 3D объем. Например, нагревание может стимулировать быстрое изменение температуры в целевом объеме и получение термометрических данных за короткое время требуется для того, чтобы должным образом управлять выделением энергии.
Согласно одному варианту осуществления, каждый из первого и второго набора плоскостей среза содержит одну плоскость среза, ориентированную параллельно продольной оси.
Согласно одному варианту осуществления, каждый из первого и второго набора плоскостей среза дополнительно содержит одну или более параллельных плоскостей среза, параллельных продольной оси.
Согласно одному варианту осуществления, каждый из первого и второго набора плоскостей среза дополнительно содержит одну или более веерообразных плоскостей среза, параллельных продольной оси.
Согласно одному варианту осуществления, каждый из первого и второго набора плоскостей среза дополнительно содержит плоскости, размещаемые вдоль продольной оси.
Первый набор плоскостей среза может быть определен в невращающемся положении. То есть первый набор плоскостей среза является фиксированным набором плоскостей среза. Эти первые плоскости среза дополнительно содержат трансаксиальные плоскости, перпендикулярные продольной оси. Второй набор плоскостей среза вращается относительно вращения катетера, следуя траектории вращения. Вращение может происходить от куска к куску на фиксированные углы по траектории вращения относительно продольной оси и/или отставать или опережать вращение катетера с известным соотношением. Это обеспечивает возможность визуализации клинически полезных эффектов нагревания до и после действительного активного нагревания. Такими эффектами могут быть перфузия, диффузия и перенос тепла внутри тканей.
Согласно одному варианту осуществления, исполнение исполняемых машиной инструкций дополнительно предписывает процессору принять план лечения, содержащий инструкции для управления работой ультразвукового преобразователя; получить одно или более опорных изображений целевого объема в предварительно определенных положениях относительно продольной оси по траектории вращения катетера; вычислить изменение температуры между первым и вторым набором плоскостей среза и соответствующим одним или более опорными изображениями; и управлять работой ультразвукового преобразователя с поправкой на изменение температуры.
Измерение изменения температуры предоставляет клиницисту точные данные измерения температуры и термометрические данные в реальном времени. Таким образом, температура может оптимизироваться и регулироваться постоянно посредством использования, например, пропорционального, интегрального и дифференциального (PID) контроллера. PID-контроллер может обновлять уровень мощности катетера согласно изменению температуры, учитывая физические характеристики, такие как перфузия, диффузия и абсорбция целевого объема. PID-контроллер может также регулировать скорость вращения катетера. Это гарантирует строго контролируемую границу между сохраняемой и разрушаемой тканью, созданную во время нагревания целевого объема.
Согласно одному варианту осуществления, ультразвуковой преобразователь содержит многочисленные элементы ультразвукового преобразователя, при этом исполнение исполняемых машиной инструкций дополнительно предписывает процессору принять первую тепловую карту целевого объема; принять план лечения, содержащий инструкции для управления работой ультразвукового преобразователя с использованием первой тепловой карты; определить вторую тепловую карту посредством использования первых и вторых термометрических данных магнитного резонанса; и управлять многочисленными элементами ультразвукового преобразователя для регулирования нагревания целевого объема в соответствии с первой и второй тепловыми картами.
Согласно одному варианту осуществления, регулирование многочисленных элементов ультразвукового преобразователя содержит подачу элементам преобразователя электрических сигналов возбуждения, имеющих регулируемые фазы, для того, чтобы применить соответствующую фазу к каждому элементу преобразователя.
Согласно одному варианту осуществления, исполнение исполняемых машиной инструкций дополнительно предписывает процессору регулировать поле обзора и положение первого и второго набора плоскостей среза. Это обеспечивает возможность покрытия зоны за пределами элементов преобразователя и таким образом покрытия большого 3D объема.
В другом аспекте, данное изобретение относится к компьютерному программному продукту, содержащему исполняемые машиной инструкции для исполнения процессором управления медицинским устройством, при этом медицинское устройство содержит модуль магнитно-резонансной визуализации для получения данных магнитного резонанса из ядер субъекта размещенного внутри визуализируемого объема; терапевтическое устройство, содержащее устройство доставки энергии для доставки энергии в целевой объем внутри визуализируемого объема, причем терапевтическое устройство выполнено с возможностью вращения вокруг продольной оси терапевтического устройства; систему позиционирования для вращения терапевтического устройства; при этом исполнение исполняемых машиной инструкций предписывает процессору:
- принять данные размещения, указывающие размещение целевого объема;
- управлять системой позиционирования для вращения терапевтического устройства вокруг продольной оси;
- управлять устройством доставки энергии для доставки энергии в целевой объем в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения;
- определить первый набор плоскостей среза целевого объема в первом положении вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации;
- управлять модулем магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза;
- определить второй набор плоскостей среза целевого объема по меньшей мере в одном втором положении вращения по траектории вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации; и
- управлять модулем магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза.
В другом аспекте, данное изобретение относится к способу управления медицинским устройством, при этом медицинское устройство содержит модуль магнитно-резонансной визуализации для получения термометрических данных магнитного резонанса из ядер субъекта размещенного внутри визуализируемого объема; терапевтическое устройство, содержащее устройство доставки энергии для доставки энергии в целевой объем внутри визуализируемого объема, причем терапевтическое устройство выполнено с возможностью вращения вокруг продольной оси терапевтического устройства; систему позиционирования для вращения терапевтического устройства; причем способ содержит этапы, на которых:
- принимают данные размещения, указывающие размещение целевого объема;
- управляют системой позиционирования для вращения терапевтического устройства вокруг продольной оси;
- управляют устройством доставки энергии для доставки энергии в целевой объем в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения;
- определяют первый набор плоскостей среза целевого объема в первом положении вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации;
- управляют модулем магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза;
- определяют второй набор плоскостей среза целевого объема по меньшей мере в одном втором положении вращения по траектории вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации; и
- управляют модулем магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем будут описаны предпочтительные варианты осуществления данного изобретения, только в качестве примера, и со ссылкой на чертежи, на которых:
Фиг. 1 показывает вид в поперечном разрезе и функциональный вид медицинского устройства,
Фиг. 2 показывает катетер,
Фиг. 3 является схемой последовательности операций способа управления медицинским устройством,
Фиг. 4 является схемой последовательности операций способа регулирования элементов ультразвукового преобразователя,
Фиг. 5 иллюстрирует упрощенный схематичный вид плоскостей среза, и
Фиг. 6 является схемой последовательности операций способа нагревания целевого объема с использованием визуализации температуры на основе изменения фазы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В нижеследующем, подобные пронумерованные элементы на фигурах являются либо подобными элементами, либо выполняют эквивалентную функцию. Элементы, которые были рассмотрены ранее, необязательно будут рассмотрены на дальнейших фигурах, если функция является эквивалентной.
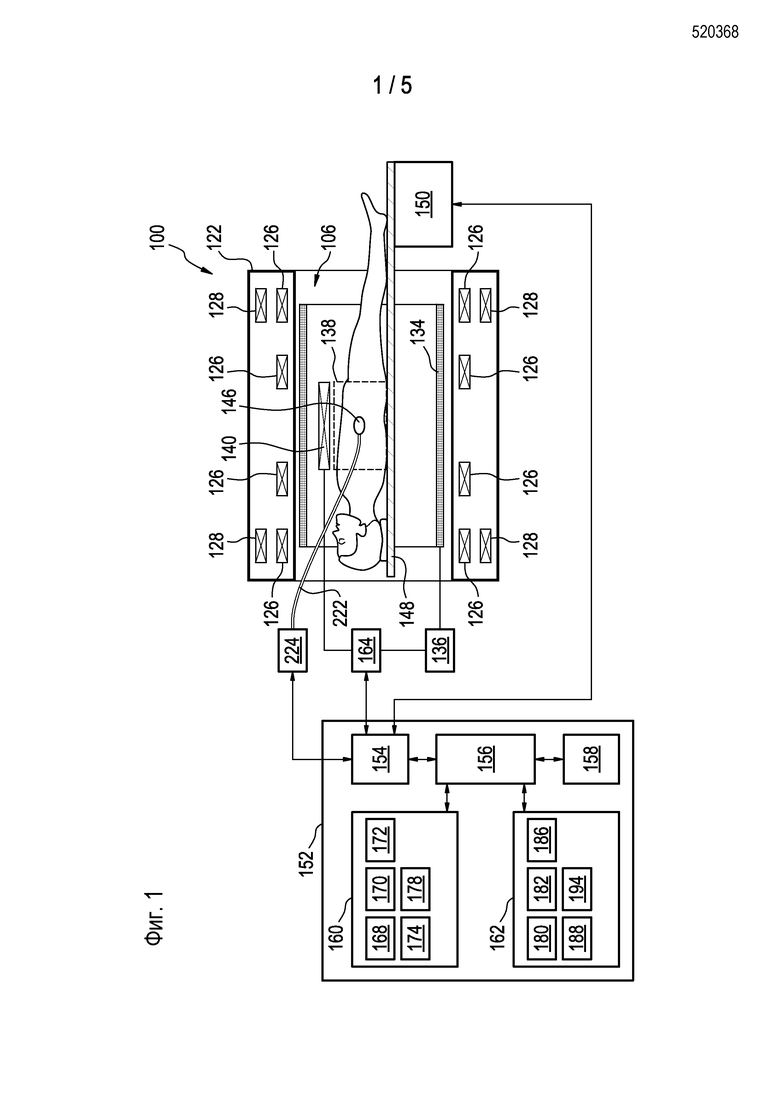
Фиг. 1 показывает вид в поперечном разрезе и функциональный вид медицинского устройства 100. Медицинское устройство 100 показано как содержащее модуль 106 магнитно-резонансной визуализации. Модуль 106 магнитно-резонансной визуализации показан как содержащий магнит 122. Магнит 122, показанный на Фиг. 1, является сверхпроводящим магнитом цилиндрического типа. Однако, для вариантов осуществления данного изобретения также применимы другие магниты. Магнит 122 имеет переохлажденный криостат 124. Внутри криостата 124 находится группа сверхпроводящих катушек 126. Также есть компенсационные катушки 128, чей ток противоположен направлению тока в сверхпроводящих катушках 126.
Внутри ствола магнита находится катушка 134 градиента магнитного поля, которая используется для получения магнитно-резонансных данных отслеживания движения и данных магнитно-резонансного изображения для пространственного кодирования объектов внутри визуализируемого объема 138 магнита 122. Катушка 134 градиента магнитного поля соединена с источником 136 питания катушки градиента магнитного поля и устройством 164 управления катушкой. Катушка 134 градиента магнитного поля предназначена для репрезентативной цели. Обычно катушки градиента магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Визуализируемый объем 138 размещен в центре магнита 122.
Рядом с визуализируемым объемом 138 находится радиочастотная катушка 140 для манипулирования ориентациями магнитных спинов внутри визуализируемого объема 138 и для приема радиопередач от спинов также внутри визуализируемого объема 138. Радиочастотная катушка 140 соединена с устройствами 164 управления катушкой. Понятно, что радиочастотная катушка 140 является просто репрезентативной.
Внутри центра магнита также размещен субъект 144. Субъект 144 имеет целевой объем 146 и показан как покоящийся на опоре 148 для субъекта. Опора 148 для субъекта имеет механическую систему 150 позиционирования (опционально). Механическая система 150 позиционирования адаптирована для позиционирования субъекта 144 внутри магнита 122. В зависимости от пространства, доступного внутри магнита, опора 148 для субъекта может быть адаптирована для перемещения субъекта в разных направлениях. Устройства 164 управления катушкой и механическая система 150 позиционирования показаны соединенными с аппаратным интерфейсом 154 компьютерной системы 152. Компьютерная система 152 использует процессор 156 для управления медицинским устройством 100.
Катетер 222 был вставлен в субъект 144. Дистальный конец катетера 222 находится внутри визуализируемого объема 138. Катетер 222 содержит ультразвуковой преобразователь. Ультразвуковым преобразователем может быть, например, линейная фазированная решетка, вмонтированная в дистальный конец катетера 222. Система 224 позиционирования прикреплена к катетеру 222. Катетер 222 предназначен по возможности представлять многочисленные катетеры, вставленные в субъект 144. Система 224 позиционирования сконфигурирована для вращения катетера 222 вокруг продольной оси катетера 222. Система 224 позиционирования показана соединенной с аппаратным интерфейсом 154.
Компьютерная система 152. показанная на Фиг. 1, является репрезентативной. Многочисленные процессоры и компьютерные системы могут быть использованы для представления функциональности, проиллюстрированной этой единой компьютерной системой 152. Компьютерная система 152 содержит аппаратный интерфейс 154, который обеспечивает процессору 156 возможность отправки и приема сообщений для компонентов медицинского устройства 100. Процессор 156 также соединен с пользовательским интерфейсом 158, компьютерным накопителем 160 и компьютерной памятью 162.
Компьютерный накопитель 160 показан как содержащий план 168 лечения. План 168 лечения содержит инструкции или план для обработки целевого объема 146. План 168 лечения может содержать сведения об анатомии 144 субъекта относительно целевого объема 146. Он может описывать объемы, которые должны быть разрушены, и объемы, которые должны быть сохранены вблизи целевого объема. Компьютерный накопитель 160 дополнительно показан как содержащий данные 170 термометрии и изображения магнитного резонанса, которые были получены модулем 106 магнитно-резонансной визуализации. Компьютерный накопитель 160 показан как дополнительно содержащий диагностические изображения 172, которые были реконструированы из данных термометрии и изображения магнитного резонанса. Компьютерный накопитель 160 показан как дополнительно содержащий координаты 174 целевого объема 146. Компьютерный накопитель 160 показан как дополнительно содержащий сигналы 178 управления нагреванием.
Компьютерная память 162 содержит исполняемые машиной инструкции 180, 182, 186, 188, 194 для выполнения процессором 156. Компьютерная память 162 показана как содержащая модуль 180 управления медицинским устройством. Модуль 180 управления медицинским устройством содержит исполняемые машиной инструкции, которые обеспечивают процессору 156 возможность управления общим функционированием медицинского устройства 100. Компьютерная память 162 показана как дополнительно содержащая модуль 182 управления катетером. Модуль 182 управления катетером содержит исполняемые машиной инструкции, которые обеспечивают процессору 156 возможность управления функционированием катетера 222.
Компьютерная память 162 показана как дополнительно содержащая модуль 186 управления магнитно-резонансной визуализацией. Модуль управления магнитно-резонансной визуализацией содержит исполняемый машиной код, который обеспечивает процессору 156 возможность управления функционированием и работой модуля 106 магнитно-резонансной визуализации. Компьютерная память 162 показана как дополнительно содержащая модуль 188 реконструкции изображения. Модуль 188 реконструкции изображения содержит исполняемый машиной код, который используется процессором 156 для реконструкции данных 170 термометрии и изображения магнитного резонанса в качестве изображений 172.
Компьютерная память 162 показана как дополнительно содержащая модуль 194 генерирования сигнала управления нагреванием. Модуль 194 генерирования сигнала управления нагреванием содержит исполняемый компьютером код, который процессор 156 использует для генерирования сигналов 178 управления нагреванием. Сигналы 178 управления нагреванием могут быть сгенерированы применительно к координатам целевого объема 146 и плана 168 лечения.
При использовании такого медицинского устройства 100, клиницист может вставить катетер 222 в субъект 144. Субъект 144 затем помещается так, чтобы целевой объем 146 находился внутри визуализируемого объема 138. Медицинское устройство 100 дополнительно выполнено с возможностью идентификации размещения дистального конца и целевого объема 146. Фокус катетера 222 является регулируемым, процессор 156 способен отправлять команды системе 224 позиционирования, так, чтобы целевой объем 146 автоматически нагревался катетером 222. Целевой объем 146 управляемым образом нагревается катетером 222 и автоматически управляется компьютерной системой 152.
Фиг. 2 показывает вид катетера 222 сверху. Катетер 222 имеет зонд 202 с дистальным концом 212. На дистальном конце 212, находится ультразвуковой преобразователь 204, имеющий плоскую поверхность 206 с решеткой 210 элементов 208 преобразователя. Решетка 210 имеет свой собственный индивидуальный электрический кабель 220. При подаче электрической энергии, ультразвуковой преобразователь 204 выделяет ультразвуковую энергию в целевой объем 146, который находится рабом или со стороны зонда 202.
Фиг. 3 является схемой последовательности операций способа управления медицинским устройством (например, 100). Медицинское устройство содержит терапевтическое устройство, такое как катетер 222. Терапевтическое устройство содержит устройство доставки энергии, такое как ультразвуковой преобразователь 204 для доставки энергии в целевой объем 146 внутри визуализируемого объема 138, причем терапевтическое устройство выполнено с возможностью вращения вокруг продольной оси терапевтического устройства. Медицинское устройство дополнительно содержит модуль 106 магнитно-резонансной визуализации и систему 224 позиционирования.
На этапе 301 процессор 156 компьютерной системы 162 принимает данные размещения, указывающие (или описывающие) размещение целевого объема 146. Размещение целевого объема 146 может представлять собой координаты целевого объема 146 по отношению к опорному кадру MRI-модуля.
На этапе 303, процессор 156 управляет системой 224 позиционирования для вращения терапевтического устройства вокруг продольной оси терапевтического устройства. Терапевтическое устройство вращается для воздействия на разные участки целевого объема 146.
На этапе 305, процессор 156 управляет устройством доставки энергии для доставки энергии в целевой объем 146 в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения. В случае катетера, это может быть сделано, например, посредством подачи на элементы 208 преобразователя электрических сигналов возбуждения, имеющих регулируемые фазы для того, чтобы применить соответствующую фазу к каждому элементу преобразователя. На этапе 307, процессор 156 определяет первый набор плоскостей среза целевого объема 146 в первом положении вращения, который должен быть визуализирован модулем 106 магнитно-резонансной визуализации. Первым положением вращения может быть невращающееся положение. То есть первый набор плоскостей среза является фиксированным набором плоскостей среза. Эти первые плоскости среза содержат трансаксиальные плоскости, перпендикулярные продольной оси.
На этапе 309, процессор 156 управляет модулем 106 магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза. Это делается посредством управления устройствами управления катушкой для получения градиентной катушки 134, чтобы сгенерировать соответствующее первое магнитное градиентное поле, и для получения радиочастотной катушки 140, чтобы сгенерировать соответствующее первое радиочастотное поле для каждого из первого набора плоскостей среза в соответствии с первым положением вращения. Первыми данными магнитного резонанса могут быть, например, первые термометрические данные магнитного резонанса.
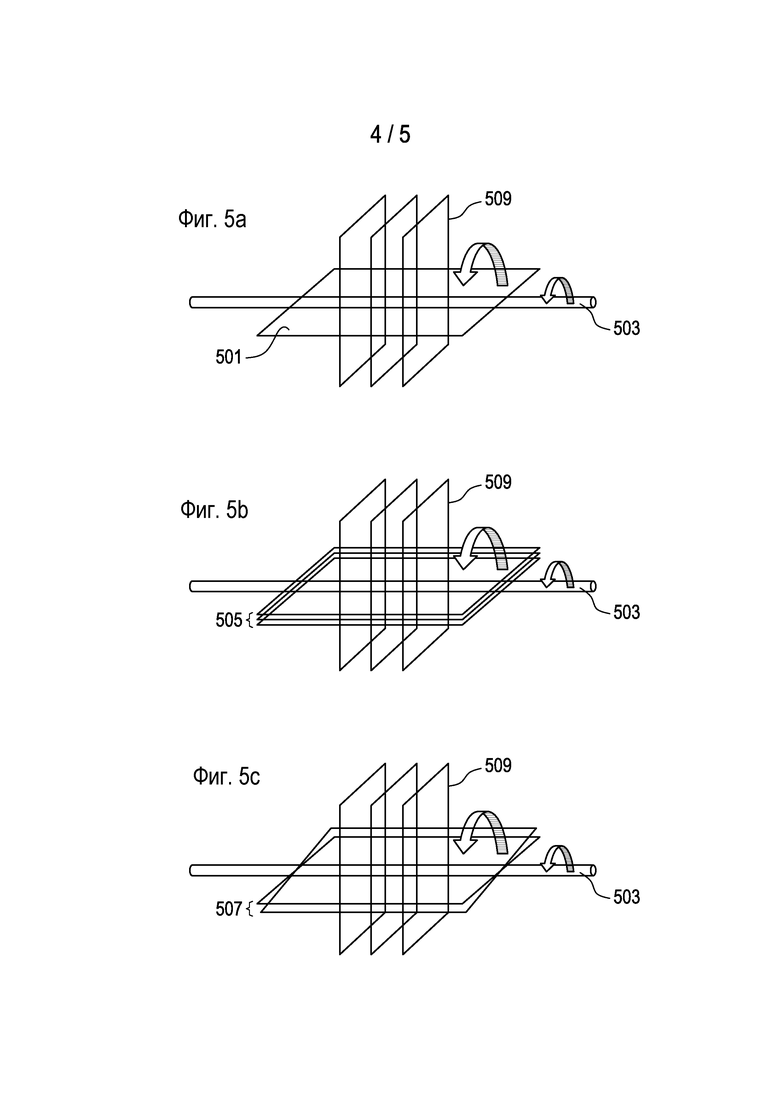
На этапе 311, процессор 156 определяет второй набор плоскостей среза целевого объема 146 по меньшей мере в одном втором положении вращения по траектории вращения, который должен быть визуализирован модулем 106 магнитно-резонансной визуализации. Каждый из первого и второго набора плоскостей среза содержит одну плоскость среза 501 (Фиг. 5a), ориентированную параллельно продольной оси 503 (Фиг. 5). Каждый из первого и второго набора плоскостей среза дополнительно содержит одну или более параллельных плоскостей среза 505 (Фиг. 5b), параллельных продольной оси 503 (Фиг. 5). Каждый из первого и второго набора плоскостей среза дополнительно содержит одну или более веерообразных плоскостей среза 507 (Фиг. 5c), параллельных продольной оси 503 (Фиг. 5). Первый набор плоскостей среза дополнительно содержит плоскости 509 (Фиг. 5), размещаемые вдоль продольной оси 503 и перпендикулярные продольной оси 503.
На этапе 313, процессор 156 управляет модулем 106 магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза. Для этого, второе положение вращения определяется с использованием системы 224 позиционирования, и устройствами управления катушкой управляют для получения градиентной катушки 134, чтобы сгенерировать соответствующее второе магнитное градиентное поле, и для получения радиочастотной катушки 140, чтобы сгенерировать соответствующее второе радиочастотное поле для каждого из второго набора плоскостей среза в соответствии со вторым положением вращения. Первые и вторые данные магнитного резонанса могут быть получены одновременно. Вторыми данными магнитного резонанса могут быть, например, вторые термометрические данные магнитного резонанса. Первые (вторые) термометрические данные магнитного резонанса и первые (вторые) морфологические данные магнитного резонанса из первого (второго) набора плоскостей среза могут быть получены с помощью последовательности чередующихся импульсов.
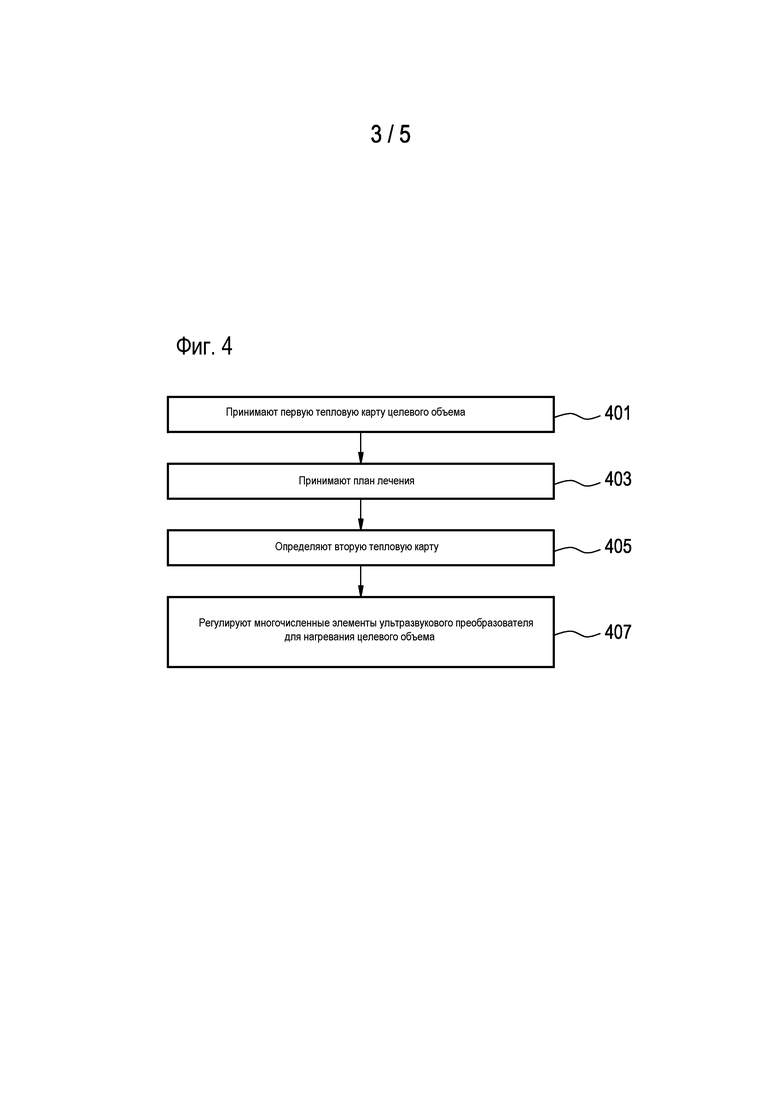
Фиг. 4 показывает схему последовательности операций способа регулирования элементов ультразвукового преобразователя 208. На этапе 401, процессор 156 принимает первую тепловую карту целевого объема. Тепловая карта может быть, например, пространственным распределением с присвоенными цветами, представляющими уровень температуры в разных зонах целевого объема. На этапе 403, процессор 156 принимает план лечения, содержащий инструкции для управления работой ультразвукового преобразователя 204 с использованием первой тепловая карта совместно с данными размещения. Управление может быть выполнено, например, посредством контроля в ходе нагревания. На этапе 405, процессор 156 определяет вторую тепловую карту посредством использования первых и вторых термометрических данных магнитного резонанса. Вторая тепловая карта может быть получена посредством добавления измерения приращения температуры во втором положении вращения к первой тепловой карте. На этапе 407, процессор 156 управляет многочисленными элементами ультразвукового преобразователя 208 для регулирования нагревания целевого объема 146 в соответствии с первой и второй тепловыми картами. Управление многочисленными элементами ультразвукового преобразователя 208 может быть выполнено посредством подачи на эти элементы 208 преобразователя электрических сигналов возбуждения, имеющих регулируемые фазы для того, чтобы применить соответствующую фазу к каждому элементу преобразователя.
Фиг. 6 показывает схему последовательности операций способа нагревания целевого объема с использованием визуализации температуры на основе PRF. На этапе 601, процессор 156 принимает план лечения, содержащий инструкции для управления работой ультразвукового преобразователя 204. На этапе 603, процессор 156 получает одно или более опорных изображений целевого объема 146 в предварительно определенных положениях относительно продольной оси по траектории вращения катетера 222. На этапе 605, процессор вычисляет изменение температуры между первым и вторым набором плоскостей среза и соответствующим одним или более опорными изображениями. На этапе 607, процессор 156 управляет работой ультразвукового преобразователя с поправкой на изменение температуры. Измерение изменения температуры предоставляет терапевту (клиницисту) точные данные измерения температуры и термометрические данные в реальном времени. Таким образом, температура может оптимизироваться и регулироваться постоянно посредством использования, например, пропорционального, интегрального и дифференциального (PID) контроллера. PID-контроллер может обновлять уровень мощности катетера, учитывая физические характеристики, такие как диффузия и абсорбция целевого объема. PID-контроллер может также регулировать скорость вращения катетера.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
100 медицинское устройство
106 модуль магнитно-резонансной визуализации
122 магнит
124 криостат
126 сверхпроводящая катушка
128 компенсационная катушка
134 катушка градиента магнитного поля
136 источник питания катушки градиента магнитного поля
138 визуализируемый объем
140 радиочастотная катушка
144 субъект
146 целевой объем
148 опора для субъекта
150 механическая система позиционирования
152 компьютерная система
154 аппаратный интерфейс
156 процессор
158 пользовательский интерфейс
160 компьютерный накопитель
162 компьютерная память
164 устройства управления катушкой
168 план лечения
170 данные магнитного резонанса
172 магнитно-резонансное изображение
174 координаты целевого объема
178 сигналы управления нагреванием
180 модуль управления медицинским устройством
182 модуль управления катетером
186 модуль управления магнитно-резонансной визуализацией
188 модуль реконструкции изображения
190 модуль регистрации изображений
192 модуль генерирования сигнала управления исполнительным механизмом
194 модуль генерирования сигнала управления нагревания
222 катетер
224 система позиционирования
202 зонд
204 ультразвуковой преобразователь
206 плоская поверхность
208 элемент преобразователя
210 решетка
212 дистальный конец
301-309 этапы
401-407 этапы
501 одна плоскость среза
503 продольная ось
505 параллельные плоскости среза
507 веерообразные плоскости среза
509 плоскость среза
601-607 этапы


Группа изобретений относится к медицине, а именно к способу управления медицинским устройством. Машиночитаемый носитель информации содержит машиночитаемые инструкции для исполнения процессором, управляющим медицинским термотерапевтическим устройством, способа, содержащего этапы, на которых принимают данные размещения, указывающие размещение целевого объема; управляют системой позиционирования для вращения терапевтического устройства, содержащего устройство доставки энергии, вокруг продольной оси терапевтического устройства; управляют устройством доставки энергии для доставки энергии в целевой объем в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения; определяют первый фиксированный набор плоскостей среза, перпендикулярный продольной оси катетера в первом положении вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации; управляют модулем магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза; определяют второй набор плоскостей среза, параллельных продольной оси катетера, вращающихся относительно вращения катетера по меньшей мере в одном втором положении вращения терапевтического устройства по траектории вращения, который должен быть визуализирован модулем магнитно-резонансной визуализации; и управляют модулем магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза. Группа изобретений позволяет получить достаточный тепловой некроз для целевого объема, а также избежание чрезмерного нагревания и повреждения окружающих здоровых тканей. 3 н. и 12 з.п. ф-лы, 8 ил.
1. Медицинское термотерапевтическое устройство (100), содержащее:
- модуль (106) магнитно-резонансной визуализации для получения данных магнитного резонанса из ядер субъекта, размещенного внутри визуализируемого объема (138);
- терапевтическое устройство, содержащее катетер (222) с устройством доставки энергии для доставки энергии в целевой объем (146) внутри визуализируемого объема (138), причем терапевтическое устройство выполнено с возможностью вращения вокруг продольной оси терапевтического устройства;
- систему (224) позиционирования для вращения терапевтического устройства;
- память (162) для хранения машиноисполняемых инструкций (180, 182, 186, 188, 194); и
- процессор (156) для управления медицинским термотерапевтическим устройством (100), при этом исполнение машиноисполняемых инструкций предписывает процессору:
- принимать данные размещения, указывающие размещение целевого объема (146);
- управлять системой (224) позиционирования для вращения терапевтического устройства вокруг продольной оси;
- получить одно или более опорных изображений целевого объема в предварительно определенных положениях относительно продольной оси по траектории вращения катетера:
- управлять устройством доставки энергии для доставки энергии в целевой объем (146) в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения;
- определять первый фиксированный набор из одной или более плоскостей среза, перпендикулярных продольной оси катетера (222), в первом положении вращения, который должен быть визуализирован модулем (106) магнитно-резонансной визуализации;
- управлять модулем (106) магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза;
- определять второй набор из одной или более плоскостей среза целевого объема (146), параллельных продольной оси катетера (222), вращающихся относительно вращения катетера, по меньшей мере в одном втором положении вращения по траектории вращения, который должен быть визуализирован модулем (106) магнитно-резонансной визуализации;
- управлять модулем (106) магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза;
- при этом первые данные магнитного резонанса содержат первые термометрические данные магнитного резонанса, и вторые данные магнитного резонанса содержат вторые термометрические данные магнитного резонанса; и
- исполнение машиноисполняемых инструкций предписывает процессору вычислить изменение температуры между первым и вторым наборами плоскостей среза и соответствующим одним или более опорными изображениями.
2. Медицинское устройство по п.1, в котором устройство доставки энергии содержит ультразвуковой преобразователь, при этом ультразвуковой преобразователь (204) является линейной фазированной решеткой, установленной на дистальном конце (212) катетера (222), при этом во время доставки энергии в целевой объем происходит нагревание целевого объема.
3. Медицинское устройство по п.1, дополнительно содержащее градиентную катушку (134), радиочастотную катушку (140) и устройства (164) управления катушкой, при этом управление модулем (106) магнитно-резонансной визуализации для получения вторых данных магнитного резонанса содержит:
- управление устройствами (164) управления катушкой для возбуждения градиентной катушки (134), чтобы сгенерировать соответствующее первое магнитное градиентное поле, и для возбуждения радиочастотной катушки (140), чтобы сгенерировать соответствующее первое радиочастотное поле для каждого из второго набора плоскостей среза в соответствии со вторым положением вращения.
4. Медицинское устройство по п.3, в котором управление модулем (106) магнитно-резонансной визуализации для получения первых данных магнитного резонанса содержит:
- управление устройствами (164) управления катушкой для возбуждения градиентной катушки (134), чтобы сгенерировать соответствующее второе магнитное градиентное поле, и для возбуждения радиочастотной катушки (140), чтобы сгенерировать соответствующее второе радиочастотное поле для каждого из первого набора плоскостей среза в соответствии с первым положением вращения.
5. Медицинское устройство по п.2, в котором исполнение машиноисполняемых инструкций дополнительно предписывает процессору (156) получить вторые термометрические данные магнитного резонанса и вторые морфологические данные магнитного резонанса из второго набора плоскостей среза с помощью последовательности чередующихся импульсов.
6. Медицинское устройство по п.2, в котором исполнение машиноисполняемых инструкций дополнительно предписывает процессору (156) получить первые термометрические данные магнитного резонанса и первые морфологические данные магнитного резонанса из первого набора плоскостей среза с помощью последовательности чередующихся импульсов.
7. Медицинское устройство по любому из предшествующих пунктов, в котором исполнение машиноисполняемых инструкций дополнительно предписывает процессору (156) одновременно получить первые и вторые данные магнитного резонанса.
8. Медицинское устройство по п.1, в котором каждый из первого и второго наборов плоскостей среза содержит одну плоскость среза, ориентированную параллельно продольной оси.
9. Медицинское устройство по п.1, в котором каждый из первого и второго наборов плоскостей среза дополнительно содержит одну или более параллельных плоскостей среза, параллельных продольной оси.
10. Медицинское устройство по п.1, в котором каждый из первого и второго наборов плоскостей среза дополнительно содержит одну или более веерообразных плоскостей среза, параллельных продольной оси.
11. Медицинское устройство по п.1, в котором каждый из первого и второго наборов плоскостей среза дополнительно содержит плоскости, размещенные вдоль продольной оси.
12. Медицинское устройство по п.2, в котором исполнение машиноисполняемых инструкций дополнительно предписывает процессору:
- принять план лечения, содержащий инструкции для управления работой ультразвукового преобразователя (204);
- получить одно или более опорных изображений целевого объема (146) в предварительно определенных положениях относительно продольной оси по траектории вращения катетера (222);
- вычислить изменение температуры между первым и вторым наборами плоскостей среза и соответствующим одним или более опорными изображениями; и
- управлять работой ультразвукового преобразователя (204) с поправкой на изменение температуры.
13. Медицинское устройство по п.2, в котором ультразвуковой преобразователь содержит множество элементов ультразвукового преобразователя, при этом исполнение машиноисполняемых инструкций дополнительно предписывает процессору:
- принять первую тепловую карту целевого объема;
- принять план лечения, содержащий инструкции для управления работой ультразвукового преобразователя с использованием первой тепловой карты;
- определять вторую тепловую карту посредством использования первых и вторых термометрических данных магнитного резонанса; и
- управлять множеством элементов ультразвукового преобразователя для регулирования нагревания целевого объема в соответствии с первой и второй тепловыми картами.
14. Машиночитаемый носитель информации, содержащий машиноисполняемые инструкции (180, 182, 186, 188, 194) для исполнения процессором (156), управляющим медицинским термотерапевтическим устройством (100), при этом медицинское термотерапевтическое устройство (100) содержит модуль (106) магнитно-резонансной визуализации для получения данных магнитного резонанса из ядер субъекта, размещенного внутри визуализируемого объема (138); терапевтическое устройство, содержащее катетер с устройством доставки энергии для доставки энергии в целевой объем (146) внутри визуализируемого объема (138), причем терапевтическое устройство выполнено с возможностью вращения вокруг продольной оси терапевтического устройства; систему (224) позиционирования для вращения терапевтического устройства; при этом исполнение машиноисполняемых инструкций предписывает процессору (156):
- принимать данные размещения, указывающие размещение целевого объема (146);
- управлять системой (224) позиционирования для вращения терапевтического устройства вокруг продольной оси;
- управлять устройством доставки энергии для доставки энергии в целевой объем (146) в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения;
- определять первый фиксированный набор из одной или более плоскостей среза, перпендикулярных продольной оси катетера (222) в первом положении вращения, который должен быть визуализирован модулем (106) магнитно-резонансной визуализации;
- управлять модулем (106) магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза;
- определять второй набор из одной или более плоскостей среза, параллельных продольной оси катетера (222), вращающихся относительно вращения катетера по меньшей мере в одном втором положении вращения по траектории вращения, который должен быть визуализирован модулем (106) магнитно-резонансной визуализации; и
- управлять модулем (106) магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза.
15. Способ управления медицинским термотерапевтическим устройством (100), при этом медицинское термотерапевтическое устройство (100) содержит модуль (106) магнитно-резонансной визуализации для получения данных магнитного резонанса из ядер субъекта, размещенного внутри визуализируемого объема (138); терапевтическое устройство, содержащее катетер с устройством доставки энергии для доставки энергии в целевой объем (146) внутри визуализируемого объема (138), причем терапевтическое устройство выполнено с возможностью вращения вокруг продольной оси терапевтического устройства; систему (224) позиционирования для вращения терапевтического устройства; причем способ содержит этапы, на которых:
- принимают данные размещения, указывающие размещение целевого объема (146);
- управляют системой (224) позиционирования для вращения терапевтического устройства вокруг продольной оси;
- управляют устройством доставки энергии для доставки энергии в целевой объем (146) в первом положении вращения относительно продольной оси по траектории вращения терапевтического устройства с использованием данных размещения;
- определяют первый фиксированный набор из одной или более плоскостей среза, перпендикулярных продольной оси катетера (222), в первом положении вращения, который должен быть визуализирован модулем (106) магнитно-резонансной визуализации;
- управляют модулем (106) магнитно-резонансной визуализации для получения первых данных магнитного резонанса из первого набора плоскостей среза;
- определяют второй набор из одной или более плоскостей среза, параллельных продольной оси катетера (222), вращающихся относительно вращения катетера, по меньшей мере в одном втором положении вращения по траектории вращения, который должен быть визуализирован модулем (106) магнитно-резонансной визуализации; и
- управляют модулем (106) магнитно-резонансной визуализации для получения вторых данных магнитного резонанса из второго набора плоскостей среза.
| US 2007239062 A1, 11.10.2007 | |||
| US 20120053448 A1, 01.09.2010 | |||
| US 2012070058 A1, 22.03.2012 | |||
| HYNYNEN K | |||
| et al | |||
| "MRI guided and monitored focused ultrasound thermal ablation methods: a review of progress", INTERNATIONAL JOURNAL OF HYPERTHERMIA, BASINGSTOKE, vol | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ПЛАМЕННАЯ ПЕЧЬ ДЛЯ ПЛАВКИ ИЛИ НАГРЕВАНИЯ МЕТАЛЛОВ | 1920 |
|
SU725A1 |

