Изобретение относится к области медицины, когнитивных технологий и смежных областей и предназначено для использования в терапии болезней нервной системы и заболеваний головного мозга, в технологиях активизации творческих способностей и восстановления утраченных функций сенсоров пациентов.
Известны различные способы и устройства транскраниальной магнитной стимуляции.
Известны способы транскраниальной магнитной стимуляции и устройства для его осуществления (см. патенты US9352167 B2 и US20100113959A1), включающие проведение транскраниальной магнитной стимуляции (ТМС), при котором осуществляется пространственное суммирование магнитных потоков за счет множества электромагнитов, расположенных в пространстве вокруг головы реципиента на определенном шаге друг от друга и с числом обмоток на катушке от одного до двух.
Известен также способ транскраниальной магнитной стимуляции (см. патент US 8052591 B2), включающий проведение транскраниальной магнитной стимуляции (ТМС), в заданных местах головного или спинного мозга множеством электромагнитов, расположенных в заданной конфигурации.
Наиболее близким к заявленному изобретению является способ транкраниальной магнитной стимуляции, включающий воздействие магнитным полем, формируемым катушками индукторов (см. патент US 20050228209 A1), включающий перемещение одной и более катушек относительно зоны стимуляции, причем магнитные поля катушек воздействуют на зону стимуляции из нескольких точек, в результате суммарная энергия магнитного поля от катушек в зоне стимуляции больше, чем энергия магнитного поля в областях вблизи зоны стимуляции на том же расстоянии от катушки.
Общим недостатком перечисленных известных способов является, наличие значительных по уровню электромагнитных помех из-за необходимости применения множества перемещающихся по кругу электромагнитов, воздействующих на мозг реципиента, что приводит к низкой технологичности, эффективности и точности.
Задачей, на решение которой направлено изобретение, является повышение эффективности и технологичности.
Технический результат, получаемый при решении поставленной задачи, заключается в обеспечении снижения уровня электромагнитных помех за счет обеспечения движения магнитного потока вокруг головы реципиента по гибкому магнитопроводу, что также повышает эффективность воздействия на мозг за счет увеличения магнитного потока, проходящего через зону стимуляции мозга. Кроме того, обеспечиваются необходимые условия, при которых вектор индукции магнитного поля проходит через зону стимуляции мозга за счет направления вектора индукции магнитного поля по дуге окружности, с центром вращения, проходящего через зону стимуляции мозга, что повышает эффективность и технологичность стимуляции.
Для решения поставленной задачи способ транcкраниальной магнитной стимуляции, включающий воздействие магнитным полем, формируемым катушками индукторов, отличается тем, что используют две катушки индукторов магнитного поля, которые соединяют по магнитному потоку гибким магнитопроводом и перемещают вокруг головы реципиента по дуге окружности в произвольном направлении с равной их угловой скоростью, при этом центр вращения траектории перемещения катушек, проходит через зону стимуляции мозга.
Кроме того, при перемещении катушек индукторов вокруг головы реципиента устанавливают наличие запрещенных зон мозга, через которые движение вектора индукции магнитного поля опасно или запрещено, при этом при приближении вектора индукции магнитного поля к этим зонам минимизируют значения индукции магнитного поля.
Кроме того, контролируют значения энергии магнитного поля, воздействующих на зону стимуляции и запрещенные зоны мозга реципиента, для чего измеряют напряженность магнитного поля, действующих в указанных зонах и фиксируют длительность этого воздействия, при этом устанавливают допустимые значения этого воздействия на безопасном уровне.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналогов свидетельствует о соответствии заявленного решения критерию «новизна».
Признаки отличительной части формулы изобретения обеспечивают решение комплекса функциональных задач.
Признаки, указывающие, что «используют две катушки индукторов магнитного поля, которые соединяют по магнитному потоку гибким магнитопроводом», обеспечивают снижение электромагнитных помех за счет движения магнитного потока, формируемого катушками индукторов вокруг головы реципиента, по гибкому магнитопроводу, а также, повышают эффективность воздействия на мозг за счет увеличения магнитного потока, формирующего вектор индукции магнитного поля, проходящего через зону стимуляции мозга.
Признаки, указывающие, что «катушки индукторов перемещают вокруг головы реципиента по дуге окружности», обеспечивают возможность подачи магнитного потока через зону стимуляции мозга с произвольных точек вокруг головы реципиента.
Признаки, указывающие, что катушки индукторов перемещают вокруг головы реципиента «в произвольном направлении с равной их угловой скоростью, при этом центр вращения траектории перемещения катушек, проходит через зону стимуляции мозга» обеспечивают необходимые и достаточные условия, при которых вектор индукции магнитного поля проходит через зону стимуляции мозга при перемещении катушек индукторов вокруг головы реципиента.
Признаки первого дополнительного пункта формулы изобретения позволяют, при необходимости, ввести опасные и запрещенные зоны в мозге при проведении транcкраниальной магнитной стимуляции, а также, поясняют принцип управления значениями индукции магнитного поля при движении вектора магнитной индукции вблизи опасных и запрещенных зон в мозге.
Признаки второго дополнительного пункта формулы изобретения позволяют обеспечить контроль и условия дозированного безопасного воздействия магнитным полем на зону стимуляции и запрещенные зоны мозга реципиента.
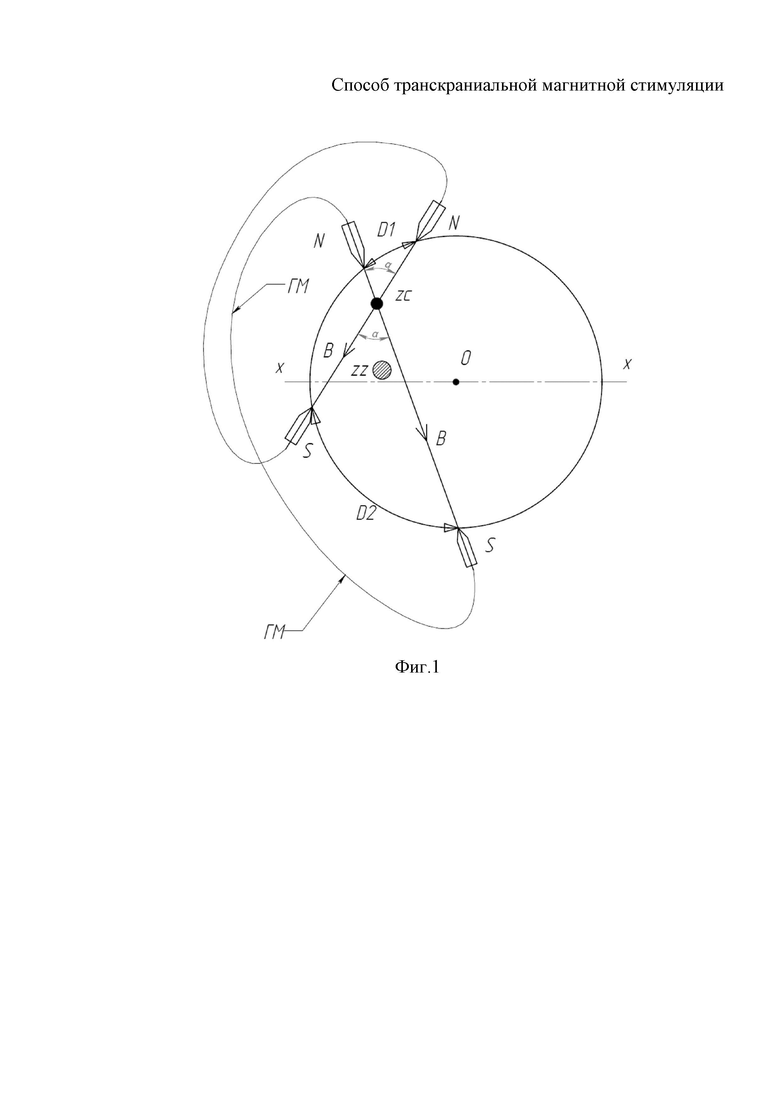
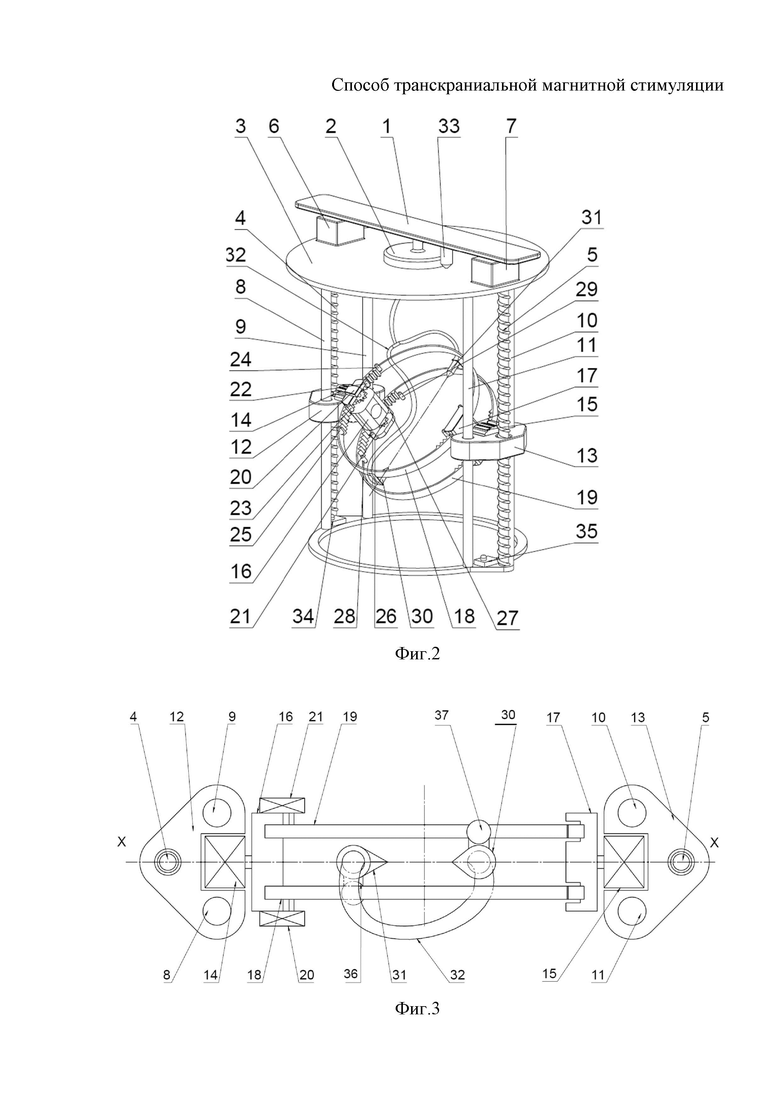
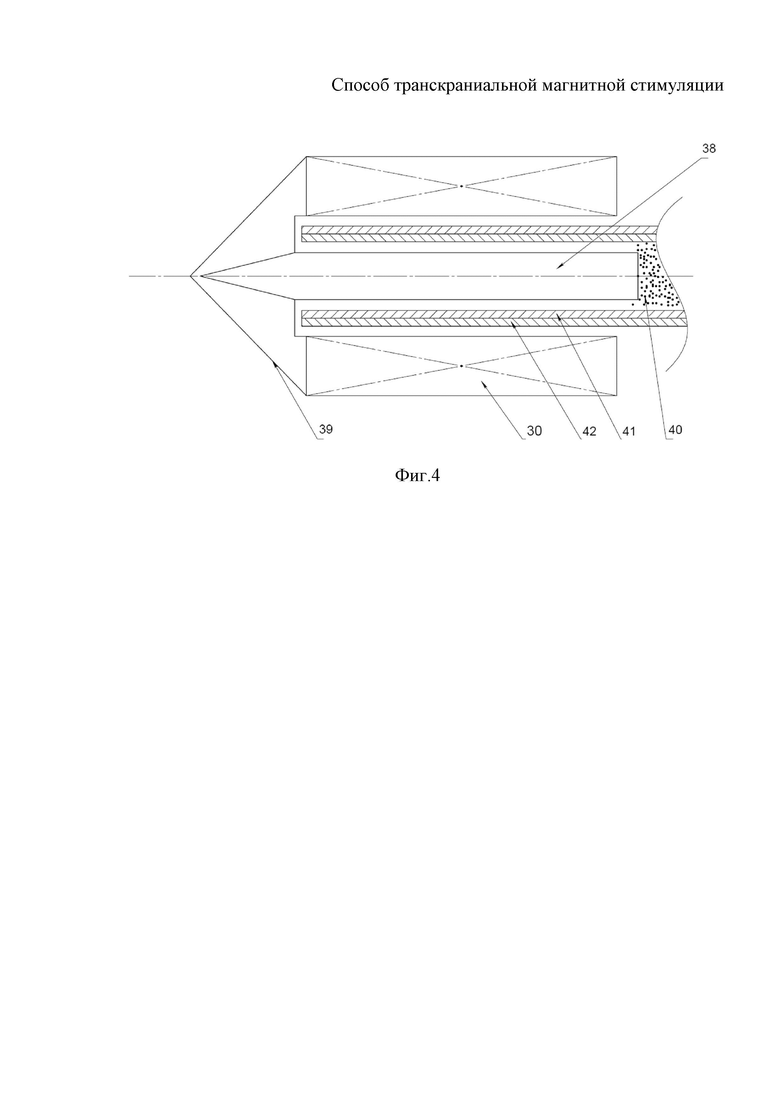
На фиг. 1 схематически показаны перемещение катушек индукторов и вектора индукции магнитного поля в рабочем пространстве устройства (здесь, рабочее пространство устройства, это пространство, ограниченное областью перемещения вектора индукции магнитного поля, сформированного катушками индукторов, и заданное в цилиндрической или сферической системе координат, в которое помещается голова реципиента); на фиг. 2 - схема устройства; на фиг. 3 - разрез устройства в горизонтальной плоскости по оси вращения поворотных платформ (вид сверху) для случая, когда ось вращения колец лежит в горизонтальной плоскости, нормально к оси вращения поворотных платформ; на фиг. 4 показан разрез гибкого магнитопровода.
На фиг. 1: N и S - северный и южный полюсы катушек индукторов магнитного поля; ГМ - гибкий магнитопровод; D1 и D2 - дуги окружности; O – центр окружности и начало координат в цилиндрической или сферической системе координат; В - вектор магнитной индукции магнитного поля между катушками индукторов; ZC, ZZ и ZD – соответственно, зона стимуляции, запрещенные и опасные зоны мозга; α - угол поворота катушек индукторов; ZC, ZZ и ZD, соответственно, зона стимуляции, запрещенные и опасные зоны; X – X, ось вращения поворотных платформ; Y – Y, вертикальная ось, проходящая через центр окружности O (на чертежах не показано) ; На фиг. 2 и 3:1 - неподвижная плита; 2 – двигатель; 3 – рама; 4 и 5 - винты; 6 и 7 - двигатели; 8, 9, 10 и 11 - направляющие; 12 и 13 - платформы; 14 и 15 - двигатели; 16 и 17 – поворотные платформы; 18 и 19 - кольца; 20 и 21 – двигатели вращения колец; 22 и 23 – концевые выключатели; 24 и 25 – стопорные ограничители; 26 и 27 – концевые выключатели; 28 и 29 - стопорные ограничители; 30 и 31 - катушки индукторов магнитного поля; 32 - гибкий магнитопровод; 33 - оптический датчик положения устройства; 34 и 35 - концевые выключатели; На фиг. 3: 36 и 37 – крепления катушек; На фиг. 4: 38 - концентратор магнитного поля; 39 - защитный наконечник концентратора магнитного поля; 40 - наночастицы магнитной жидкости; 41 - внутренняя оболочка гибкого магнитопровода; 42 - внешняя оболочка гибкого магнитопровода.
На чертежах показаны: (см. фиг. 1) N и S северный и южный полюсы катушек индукторов магнитного поля, связанные гибким магнитопроводом (ГМ), и перемещающиеся по дуге окружности, соответственно D1 и D2, с центром вращения, относительно точки O и вектора магнитной индукции B вокруг головы реципиента с центром вращения, проходящего через зону стимуляции ZC мозга в произвольном направлении с равной их угловой скоростью; α – угол поворота катушек индукторов по дуге окружности D1 и D2, предельно допустимый по условиям технологичности и безопасности; ZZ и ZD, соответственно, запрещенные и опасные зоны, прохождение вектора индукции магнитного поля в которых, запрещено или опасно; X – X, ось вращения поворотных платформ, проходящая через оси вращения, соответственно, двигателей 14 и 15; Y – Y, вертикальная ось, проходящая через центр окружности O и ось вращения двигателя 2 (на чертежах не показано). На фиг. 1 ось Y – Y проходит вертикально к плоскости чертежа. Посредством осей Х – Х и Y – Y задаются, соответственно, зенитный θ и азимутальный β углы зон ZC, ZZ и ZD, а также, расстояние r от начала координат до указанных зон в сферической системе координат в рабочем пространстве устройства; на неподвижной плите 1 (см. фиг.2) жестко закреплен двигатель 2, с возможностью вращения рамы 3 вокруг вертикальной оси Y – Y; винты 4 и 5 установлены на раме 3 с возможностью их вращения, соответственно, двигателями 6 и 7 для перемещения по направляющим 8, 9, 10 и 11 платформ 12 и 13 вдоль вертикальной оси рабочего пространства устройства; двигатели 14 и 15 закреплены, соответственно, на платформах 12 и 13, с возможностью вращения ими поворотных платформ 16 и 17 вокруг поворотной оси Х – Х; кольца 18 и 19 размещены на поворотных платформах 16 и 17 с возможностью их вращения, соответственно, двигателями 20 и 21 вокруг вертикальной оси Y – Y внутри рабочего пространства устройства в произвольном направлении с равной их угловой скоростью; концевые выключатели 22 и 23 используют для выключения двигателя 20 на границах допустимого углового перемещения кольца 18; стопорные ограничители 24 и 25 используют для ограничения углового перемещения кольца 18 двигателем 20; концевые выключатели 26 и 27 используют для выключения двигателя 21 на границах допустимого углового перемещения кольца 19; стопорные ограничители 28 и 29 используют для ограничения углового перемещения кольца 19 двигателем 21; 30 и 31 – катушки индукторов магнитного поля, закреплены, соответственно, на кольцах 18 и 19, причем, (см. фиг. 3 и 4) защитный наконечник 39 концентратора 38 магнитного поля лежит в плоскости, проходящей посередине между плоскостями, образованными кольцами 18 и 19 (в дальнейшем, поворотная плоскость); 32 – гибкий магнитопровод, концы которых присоединены к катушкам индукторов магнитного поля 30 и 31, которые посредством креплений 36 и 37 закреплены к кольцам, соответственно, 31 и 30 и подвешены к раме 3; оптический датчик 33 показывает угловое положение устройства при его вращении вокруг вертикальной оси Y - Y; концевые выключатели 34 и 35, соответственно, двигателей 6 и 7, определяют нижнюю границу вертикального перемещения платформ 12 и 13; концентратор магнитного поля 38 (см. фиг. 4), обеспечивает максимальное значение напряженности магнитного поля на его конце; защитный наконечник 39 концентратора магнитного поля защищает концентратор 38 магнитного поля от механических повреждений и обеспечивает безопасность реципиента при случайном с ним контакте; наночастицы магнитной жидкости 40 обеспечивают минимальное сопротивление магнитному потоку в гибком магнитопроводе 32; внутренняя 41 и внешняя 42 оболочки гибкого магнитопровода 32, обеспечивают его, соответственно, герметичность и механическую прочность.
В базовой конструкции все платформы 3, 12 и 13, 16 и 17, направляющие 8, 9, 10, 11, кольца 18 и 19 выполнены из диэлектрического материала, например, из полиуретана, винты 6 и 7 из прочного износостойкого материала с низкой магнитной проницаемостью. Катушки индукторов 30 и 31 выполнены сменными в зависимости от целей стимуляции и типа магнитного поля, воздействующего на мозг реципиента, и могут быть выполнены, либо из тонкого провода с большим числом витков на катушке, либо из толстого провода с небольшим числом витков.
Концентратор магнитного поля 38 выполняет также функции сердечника катушки индукторов магнитного поля и выполнен из магнитомягкого материала, например, пермаллоя. В качестве наночастиц магнитной жидкости 40 могут быть использованы наноразмерные частицы магнитных материалов с высокой магнитной проницаемостью, например, пермаллоя или метгласса. Внутренняя 41 и наружная 42 оболочки гибкого магнитопровода выполнены, соответственно, из герметичного гибкого и прочного гибкого диэлектрических материалов. В качестве оболочки гибкого магнитопровода возможно использование шлангов высокого давления при условии отсутствия в них, в качестве укрепляющего материала, металлической сетки.
Стандартный способ проведения транcкраниальной магнитной стимуляции включает: 1) проведение магнито-резонансной томографии реципиента в режиме Т1 MPR; 2) построение 3D индивидуальной модели головного мозга пациента (NBS eXimia Nexstim); 3) соотнесение анатомических образований с ориентирами на магнито-резонансной томограмме (МРТ); 4) привязку координат 3D индивидуальной модели головного мозга реципиента внутри устройства транскраниальной магнитной стимуляции; 5) проведение стимуляции зон мозга по заданным координатам 3D модели головного мозга реципиента внутри устройства транскраниальной магнитной стимуляции (см. http://cyberleninka.ru/article/n/novyy-shag-k-personifitsirovannoy-meditsine-navigatsionnaya-sistema-transkranialnoy-magnitnoy-stimulyatsii-nbs-eximia-nexstim, или Червяков А.В., Пирадов М.А., Савицкая Н.Г., Черникова Л.А., Кремнева Е.И. Новый шаг к персонифицированной медицине. Навигационная система транскраниальной магнитной стимуляции (NBS EXIMIA NEXSTIM), ж-л, «Анналы клинической и экспериментальной неврологии», т.6, № 3, с. 39). В заявленном способе исходят из того, что первые четыре пункта стандартного способа решены известным образом и осуществлена привязка координат 3D индивидуальной модели головного мозга реципиента внутри устройства транскраниальной магнитной стимуляции и подлежит реализации только пятый пункт – т.е. проведение стимуляции зон мозга по заданным координатам 3D модели головного мозга реципиента внутри устройства транскраниальной магнитной стимуляции.
Для транcкраниальной магнитной стимуляции, включающей воздействие магнитным полем, (см. фиг. 1) используют две катушки индукторов магнитного поля, связанные гибким магнитопроводом (ГМ), и перемещающиеся по дуге окружности, соответственно D1 и D2, с центром вращения, относительно точки O и вектора магнитной индукции B вокруг головы реципиента с центром вращения, проходящего через зону стимуляции мозга ZC в произвольном направлении с равной их угловой скоростью на угол α, а также, задают необходимый уровень напряженности магнитного поля Н и значение суммарной энергии W в зоне стимуляции ZC и их допустимые значения в запрещенных ZZ и опасных ZD зонах, по которым, в последующем, определяются, соответственно, токи в катушках индукторов и продолжительность транскраниальной магнитной стимуляции.
Для этого задают координаты зон ZC, ZZ и ZD, например, в сферической системе в рабочем пространстве устройства посредством указания зенитного θ и азимутального β углов зон, а также, расстояния r от начала координат до указанных зон и осуществляют привязку координат 3D индивидуальной модели головного мозга реципиента внутри устройства транcкраниальной магнитной стимуляции.
На реципиенте, при построении 3D индивидуальной модели головного мозга реципиента (NBS eXimia Nexstim) и соотнесении анатомических образований с ориентирами на магнитно-резонансной томограмме (МРТ), размещаются реперные точки путем их установки, например, на капе, зажатой зубами, по которым 3D индивидуальная модель головного мозга реципиента представляется в сферической или иной системе координат. Далее, для привязки координат 3D индивидуальной модели головного мозга реципиента внутри устройства транcкраниальной магнитной стимуляции используются те же реперные точки, которые использовались при построении 3D индивидуальной модели головного мозга реципиента. Для этого, капа посредством телескопических рычагов закрепляется на неподвижной части устройства, например, в основании направляющих 8, 9, 10 или 11, с возможностью реципиенту зажать капу зубами таким же образом, как и при построении 3D индивидуальной модели головного мозга реципиента с использованием МРТ (на чертежах не показаны). При этом важно, чтобы голова реципиента была зафиксирована неподвижно. Для снижения влияния динамических процессов, вызванных ударными выбросами крови из сердца и мышечными напряжениями грудной клетки в различных фазах дыхания, реципиента усаживают на жесткий стул с прямой спинкой и закрепленными на ней регулируемыми опорами (на чертежах не показаны) для костей черепа: сосцевидных отростков и скуловой кости, в спокойном расслабленном состоянии, затем подводят снизу под сосцевидные отростки и скуловые кости регулируемые опоры и фиксируют их в верхней фазе грудного вдоха, в интервале от нормального до глубокого, обеспечивающего достаточно комфортные условия для реципиента во время проведения транскраниальной стимуляции. По реперным точкам на капе, жестко связанным с неподвижной частью устройства, осуществляют привязку координат 3D индивидуальной модели головного мозга реципиента внутри устройства транcкраниальной магнитной стимуляции путем преобразования сферической системы координат анатомических образований МРТ мозга, построенных с использованием трех точек в капе, в сферическую или иную систему координат внутри рабочего пространства устройства.
Далее, двигателем 2 по данным оптического датчика 33 устанавливают азимутальный β угол зоны стимуляции, двигателями 6 и 7 (см. фиг. 2 и 3) посредством винтов 4 и 5, перемещают платформы 12 и 13 из верхнего горизонтального положения в рабочее вдоль вертикальной оси по направляющим 8, 9, 10 и 11, а вместе с ними и поворотные платформы 16 и 17 так, чтобы ось поворотной платформы Х – Х находилась ниже или выше зоны стимуляции ZC в соответствии, с заданным зенитным θ углом зоны стимуляции и расстоянием r начала координат до указанных зон в сферической системе координат в рабочем пространстве устройства. Двигателями 14 и 15, закрепленными, соответственно, на платформах 12 и 13, поворачивают поворотные платформы 16 и 17 вокруг поворотной оси Х – Х на зенитный θ угол так, чтобы координаты зоны стимуляции ZC, оказалась лежащей на поворотной плоскости. Далее, двигателями 20 и 21 посредством вращения колец 18 и 19, осуществляют перемещение катушек индукторов магнитного поля 30 и 31, формирующих вектор индукции магнитного поля В, на допустимый угол α, с центром вращения вектора магнитной индукции B между катушками индукторов, проходящего через зону стимуляции ZC. Перемещение катушек индукторов магнитного поля 30 и 31 производится в произвольном направлении с равной их угловой скоростью, что обеспечивает постоянное прохождение вектора магнитной индукции В через зону стимуляции ZC мозга. Стимуляция зоны ZC может быть осуществлена при различных зенитных θ углах, обеспечивая при этом допустимое возможное расстояние поворотной плоскости от запрещенных ZZ и опасных ZD зон.
В предлагаемом способе устанавливают также наличие запрещенных зон ZZ мозга, через которые движение вектора индукции магнитного поля В опасно для реципиента, или запрещено, при этом при приближении вектора индукции магнитного поля к этим зонам минимизируют значения индукции магнитного поля В. Для этого ось поворотной платформы Х – Х располагают относительно зоны стимуляции ZC так, чтобы поворотная плоскость не пересекала запрещенные ZZ и опасные ZD зоны. В случае, если поворотная плоскость все же пересекает запрещенные ZZ и опасные ZD зоны, или проходит рядом, то при приближении вектора индукции магнитного поля В к этим зонам минимизируют значения индукции магнитного поля, снижая или отключая токи в катушках индукторов магнитного поля 30 и 31. Для контроля значения энергии магнитного поля, воздействующих на зону стимуляции ZC и запрещенные зоны ZZ мозга реципиента, предварительно перед проведением стимуляции измеряют, известными методами, напряженность магнитного поля, действующих в указанных зонах при различных значениях тока в катушках индукторов магнитного поля, по данным которых определяют либо необходимое время воздействия на мозг реципиента, либо значения энергии магнитного поля, воздействующих на зону стимуляции ZC. Допустимые значения энергии магнитного поля, воздействующих на зону стимуляции ZC, устанавливают на безопасном уровне, задавая длительность воздействия при известных значениях напряженностей магнитного поля, предварительно измеренных перед проведением стимуляции.
По окончании заданного времени воздействия магнитным полем на зону стимуляции мозга выключают ток в катушках индукторов 30 и 31, устанавливают двигателями 14 и 15 кольца 18 и 19 в горизонтальное положение, и, далее, двигателями 6 и 7 поднимают платформы 12 и 13 в верхнее положение, затем опускают регулируемые опоры для сосцевидных отростков и скуловой кости, после которого реципиент может выйти из рабочего пространства устройства.
Промышленная применимость
Предложенный способ транскраниальной магнитной стимуляции позволяет обеспечить высокую технологичность, эффективность и точность дозированной, безопасной стимуляции структур мозга, а также, значительно снизить уровень электромагнитных помех. Способ может быть использован в терапии болезней нервной системы и заболеваний головного мозга, в технологиях активизации творческих способностей, ускорения и повышения когнитивных ресурсов для молодых и пожилых людей, восстановления утраченных функций и сенсоров пациентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ транскраниальной магнитной стимуляции | 2017 |
|
RU2654581C1 |
| Способ транскраниальной магнитной стимуляции | 2017 |
|
RU2654271C1 |
| СПОСОБ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2018 |
|
RU2703906C1 |
| СПОСОБ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2018 |
|
RU2707653C1 |
| Способ магнитоиндукционной томографии | 2018 |
|
RU2705248C1 |
| Способ магнитоиндукционной томографии | 2018 |
|
RU2705239C1 |
| Роботизированный реабилитационный аппаратно-программный комплекс с биологической обратной связью и модулем электромиостимуляции | 2024 |
|
RU2838938C1 |
| Устройство для тренировки рук при выполнении навигационной транскраниальной магнитной стимуляции | 2023 |
|
RU2817982C1 |
| Способ повышения скорости реакции человека на внешние визуальные стимулы | 2023 |
|
RU2823493C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2023 |
|
RU2817476C1 |
Изобретение относится к области медицины, а именно к физиотерапии. Осуществляют воздействие магнитным полем, которое формируют двумя катушками индукторов, соединенными по магнитному потоку гибким магнитопроводом. Магнитное поле перемещают вокруг головы реципиента по дуге окружности в произвольном направлении с равной их угловой скоростью. При этом центр вращения траектории перемещения катушек проходит через зону стимуляции мозга. При перемещении катушек индукторов вокруг головы реципиента устанавливают наличие запрещенных зон мозга, через которые движение вектора индукции магнитного поля опасно или запрещено. При приближении вектора индукции магнитного поля к ним минимизируют значения индукции магнитного поля. Измеряют напряженность магнитного поля, действующего на зону стимуляции и запрещенные зоны, и устанавливают допустимые значения этого воздействия на безопасном уровне. Способ повышает точность дозированной и безопасной стимуляции глубинных структур мозга, что достигается за счет увеличения магнитного потока, проходящего через зону стимуляции мозга, обеспечивая необходимые условия, при которых вектор индукции магнитного поля проходит через зону стимуляции мозга. 2 з.п. ф-лы, 4 ил.
1. Способ транскраниальной магнитной стимуляции, включающий воздействие магнитным полем, формируемым катушками индукторов, отличающийся тем, что используют две катушки индукторов магнитного поля, которые соединяют по магнитному потоку гибким магнитопроводом и перемещают вокруг головы реципиента по дуге окружности в произвольном направлении с равной их угловой скоростью, при этом центр вращения траектории перемещения катушек проходит через зону стимуляции мозга.
2. Способ по п. 1, отличающийся тем, что устанавливают наличие запрещенных зон мозга, через которые движение вектора индукции магнитного поля опасно для реципиента или запрещено, при этом при приближении вектора индукции магнитного поля к этим зонам минимизируют значения индукции магнитного поля.
3. Способ по пп. 1 и 2, отличающийся тем, что контролируют значения энергии магнитного поля, воздействующего на зону стимуляции и запрещенные зоны мозга реципиента, для чего измеряют напряженность магнитного поля, действующего в указанных зонах, и фиксируют длительность этого воздействия, при этом устанавливают допустимые значения этого воздействия на безопасном уровне.
| US 2005228209 A1, 13.10.2005 | |||
| RU 2015155765 A, 14.07.2017 | |||
| УСТРОЙСТВО ДЛЯ МАГНИТНОЙ СТИМУЛЯЦИИ | 2015 |
|
RU2617806C2 |
| US 2005154426 A1, 14.07.2005 | |||
| US 2005113630 A1, 26.05.2005 | |||
| US 2016346562 A1, 01.12.2016 | |||
| ЧЕРВЯКОВ А.В | |||
| и др | |||
| Новый шаг к персонифицированной медицине | |||
| Навигационная система транскраниальной стимуляции Анналы клинической и экспериментальной неврологии | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пишущая машина | 1922 |
|
SU37A1 |

