Изобретение относится к измерительной технике и может быть использовано для измерения абсолютных величин линейных перемещений в различных отраслях машиностроения.
Известен фотоэлектрический датчик для измерения характеристик перемещения испытуемого объекта при прохождении через окно, фиксированное в пространстве (авторское свидетельство СССР №88097, кл. F42b 15/00, F41j 5/00). Указанный датчик содержит основание, боковые стойки, на которых размещены излучатели света, отражатели света и фотоприемники с индивидуальными механизмами настройки в вертикальной и горизонтальной плоскостях.
Известен фотоэлектрический датчик линейных перемещений для автоматического прецизионного измерения линейных перемещений (авторское свидетельство СССР №1368631, кл. 4 G01В 21/00), включающий измерительные решетки с механизмом взаимного разворота, полосовой фильтр, фазочувствительный детектор, сумматор, генератор, усилитель постоянного тока и привод, компенсирующий ошибку угла разворота решеток.
Известны также фотоэлектрические преобразователи линейного и углового перемещений (ФПП), используемые в автоматизированных электроприводах (March 7, 2014 by admin). Принцип действия этих преобразователей состоит в преобразовании маски в изменение интенсивности светового потока, регистрируемого фотоэлементами и преобразуемого в электрический сигнал. Эти преобразователи включают разрядные дорожки, источники света - светодиоды, фотоприемники. Выходной сигнал получается в форме двоичного кода.
Примером фотоэлектронного кодового датчика может служить датчик типа ППК-15. Датчики такого типа создают систему абсолютного отсчета углового или линейного перемещения.
В качестве прототипа использован фотоэлектрический датчик перемещения объекта по патенту РФ №2047087, МПК G01В 11/00, G01В 11/26, содержащий корпус, источник питания, модулятор, управляемый мультивибратором, генератор тока, перфорированную шторку, закрепленную на объекте перемещений, запоминающий элемент, электронный ключ, компаратор, формирователь управляющего напряжения, полосовой фильтр и синхронный детектор, оптические датчики, включающие излучатель и приемник светового луча, разветвитель в виде двухканального усилителя, сумматор, схему сравнения и фильтр низких частот.
В сравнении с указанными выше аналогами, прототип позволяет повысить точность измерения линейного перемещения связанного с ним объекта перемещения. Недостатком прототипа является его сложность.
Задачей изобретения является упрощение конструкции датчика повышение точности измерения и визуальное снятие информации абсолютной величины линейного перемещения объекта.
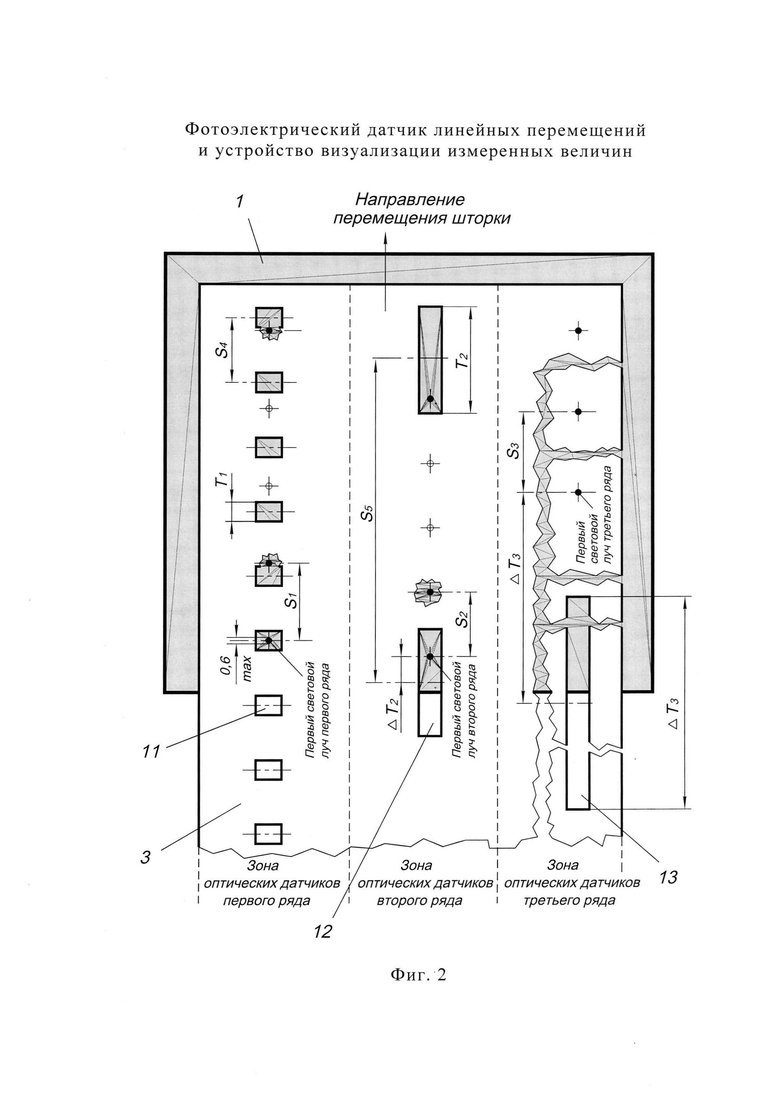
Поставленная задача решается тем, что оптические датчики на корпусе с соответствующими окнами перфорации на шторке размещены по разрядам в три ряда по направлению перемещения объекта, при этом в первом и втором рядах установлено по пять датчиков с шагом 12 и 10, в третьем ряду три датчика с шагом 40 единиц дискретности. Размеры световых лучей оптических датчиков установлены по направлению перемещения меньшим, чем 0,6 единиц, а точность их позиционных размеров размещения меньшим, чем 0,1 единиц. Соответствующие окна перфорации на шторке выполнены: для первого ряда - длиной 3 с точностью не хуже чем ±0,05 единицы и шагом 10, причем, точность любого шага и любой суммы этих шагов не хуже 0,1 единицы, для второго ряда - длиной 17 и шагом 50 единиц, для третьего ряда -одно окно длиной 126 единиц. Кроме того, в исходном положении по ходу перемещения осевые смещения окон перфорации шторки относительно оптических осей первых в ряду датчиков установлены: для первого ряда без смещения, а для второго и третьего со смещением 4 и 110 единиц дискретности соответственно.
Для визуализации измеренной величины линейного перемещения в устройстве для дешифровки оптического сигнала, содержащем блок питания, приемник-кодировщик оптического сигнала в двоичный код Грея, блок дешифровки и индикатор показаний, приемник-кодировщик оптического сигнала выполнен в виде трехкаскадного блока с выводом раскодированных логических сигналов двоичного кода, преобразованных в семисегментный код, на полупроводниковый оптический индикатор линейных перемещений, при этом:
- блок первого каскада выполнен в виде приемника-кодировщика оптических сигналов первого ряда считывающих элементов датчика в коды, реализующие логические функции НЕ и 2И-НЕ, и передатчика кодированных сигналов на дешифратор, а функцию 2И-НЕ - и на блок второго каскада;
- блок второго каскада выполнен в виде приемника -кодировщика оптических сигналов второго ряда считывающих элементов датчика в коды, реализующие логические функции 2И-НЕ, 4И-НЕ, 8И-НЕ и 2-2И-2ИЛИ-НЕ, и передатчика кодированных сигналов на дешифратор, а функций 2И-НЕ и 2-2И-2ИЛИ-НЕ - и на блок третьего каскада;
- блок третьего каскада выполнен в виде приемника-кодировщика оптических сигналов третьего ряда считывающих элементов датчика в коды, реализующие логические функции 3И-НЕ и НЕ, и передатчика кодированных сигналов на дешифратор.
Совокупность отличительных признаков обеспечивает решение поставленной задачи.
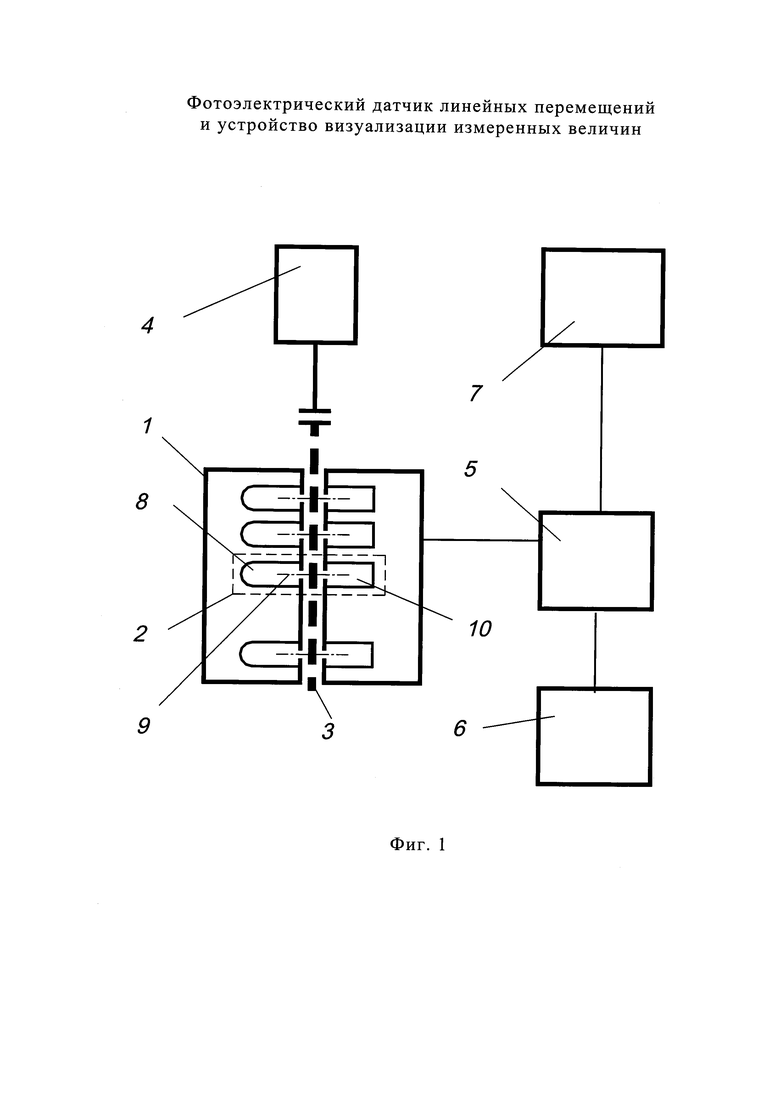
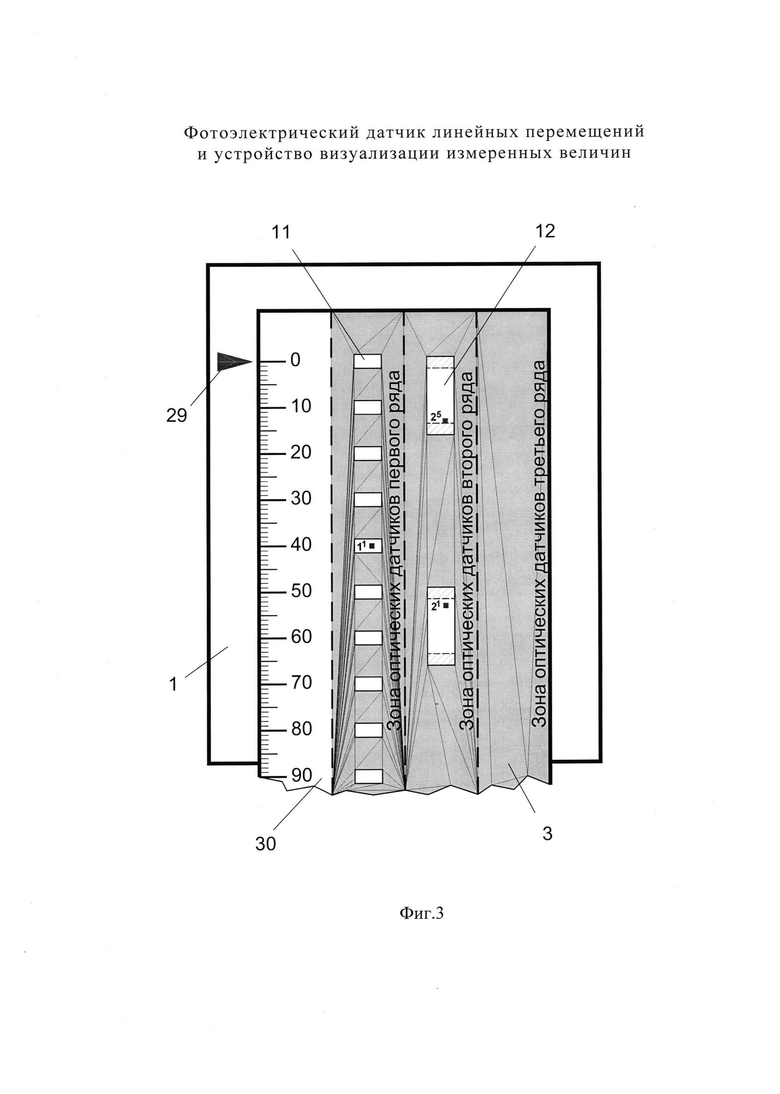
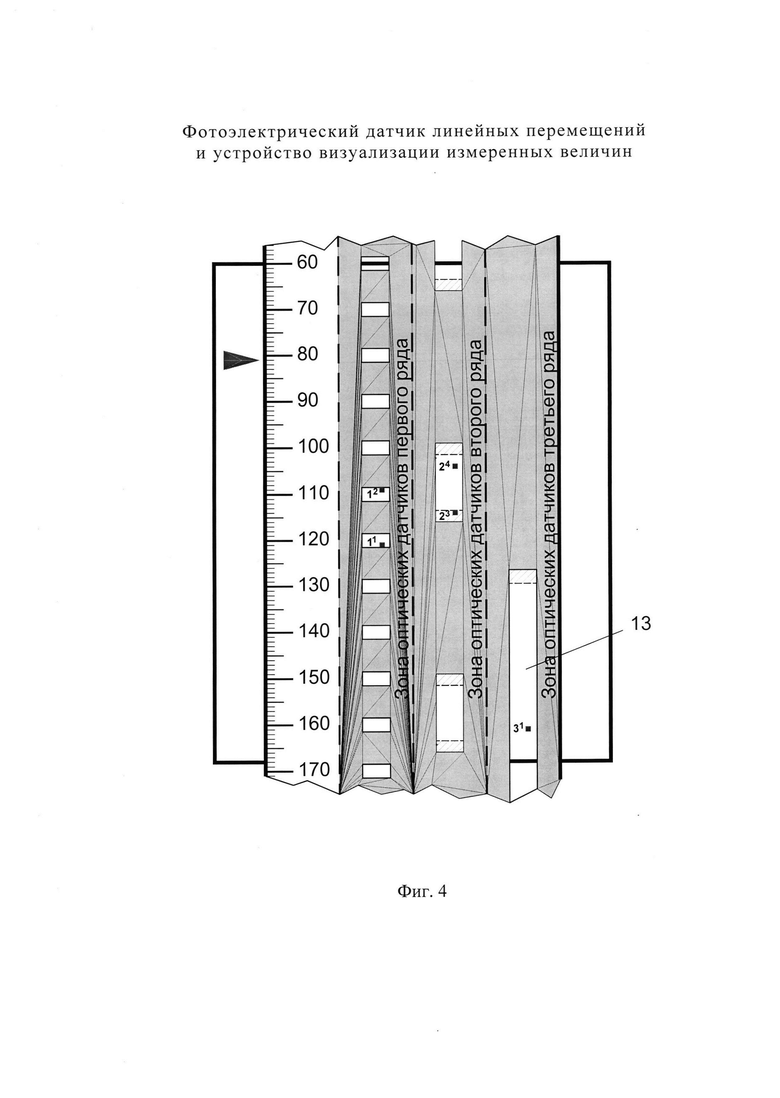
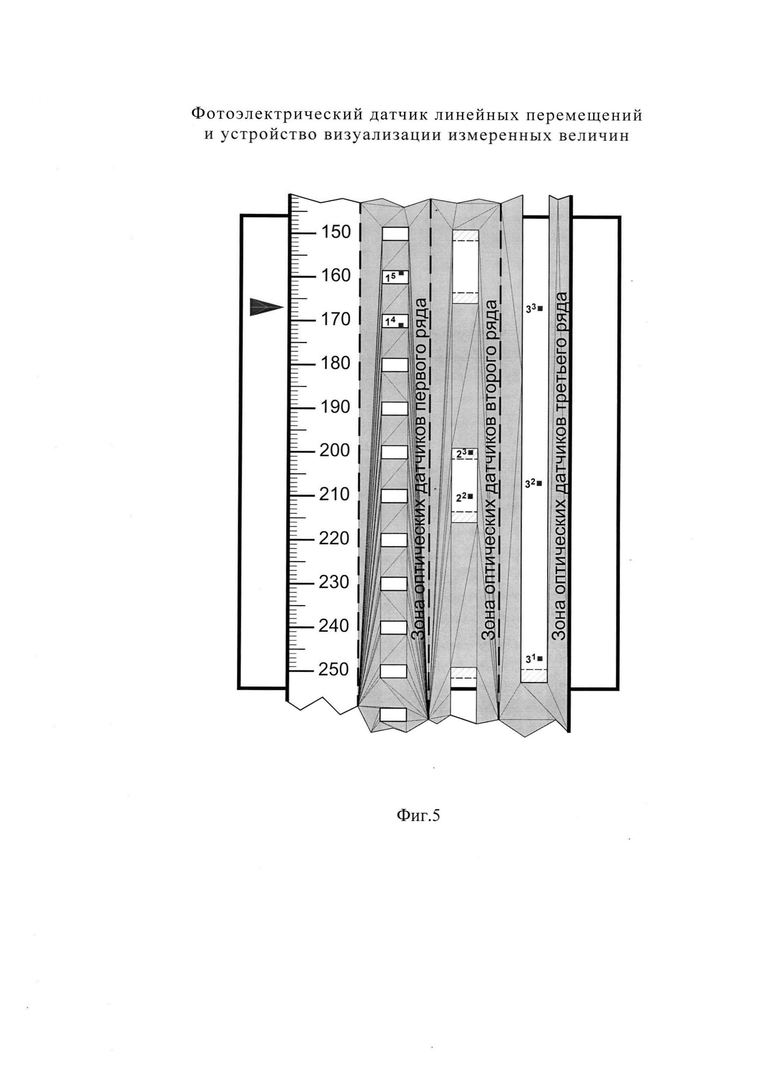
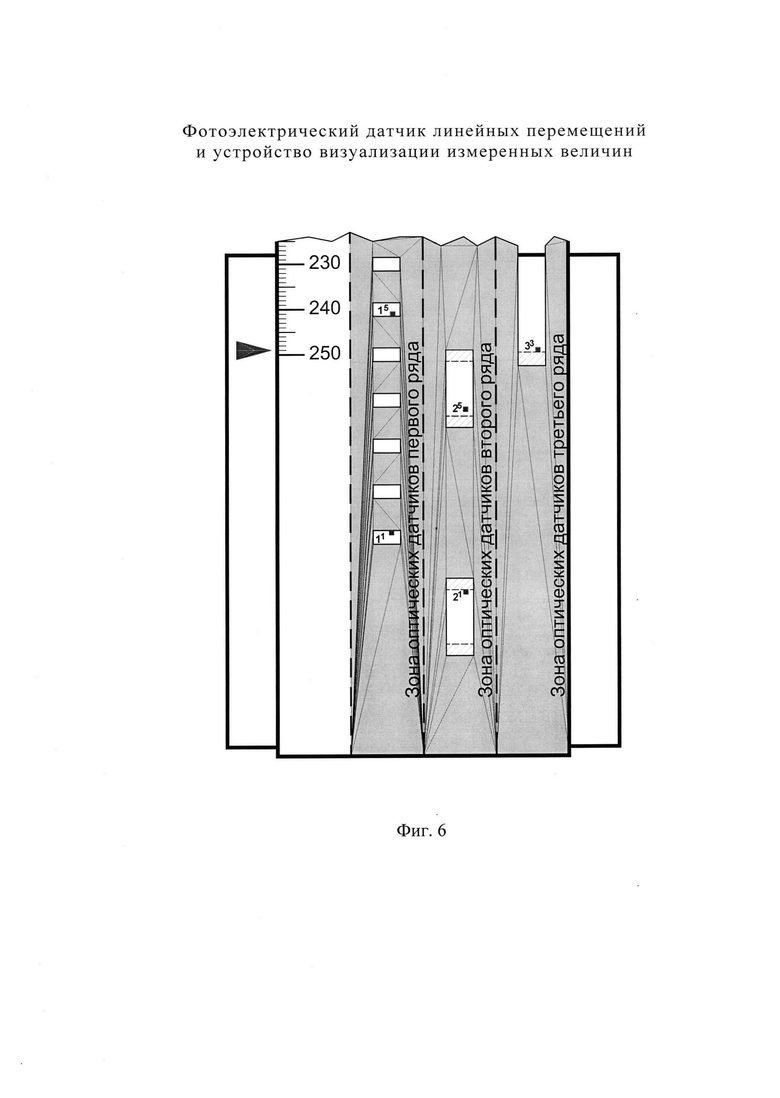
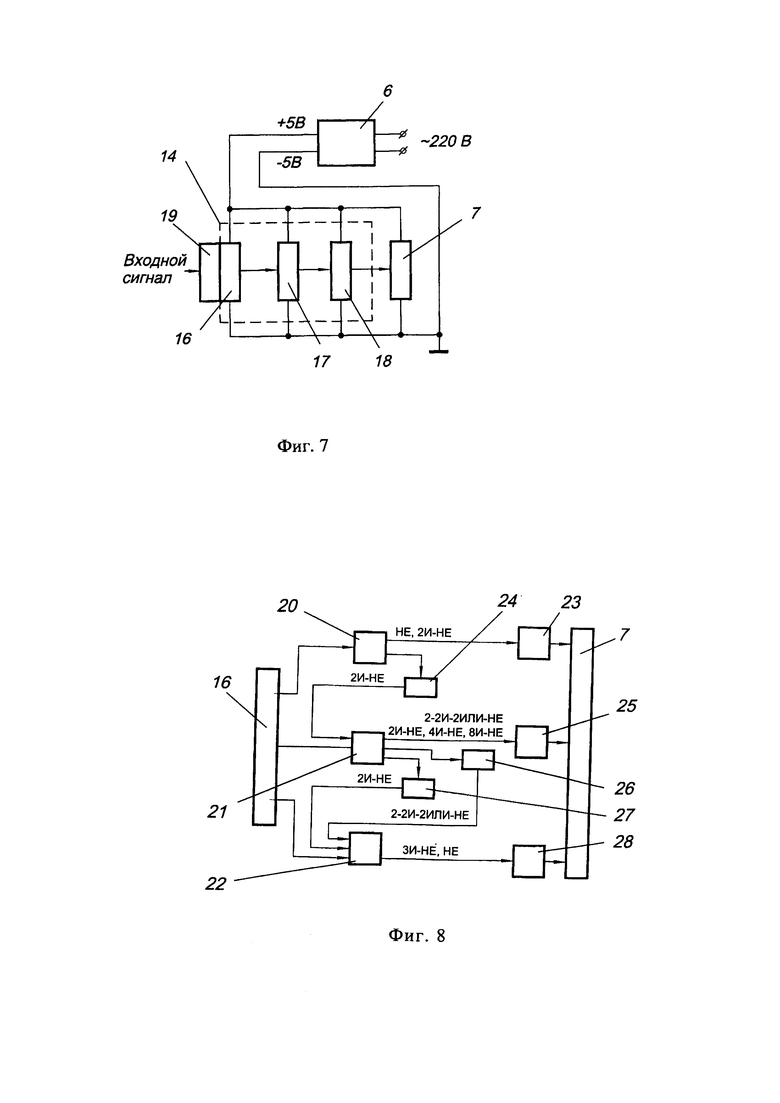
Сущность изобретения поясняется чертежом, где на фиг. 1 показана принципиальная схема датчика, на фиг. 2 - схема взаимного расположение оптических датчиков на корпусе и шторки, на фиг. 3, 4, 5, 6 - примеры визуального считывания показаний фотоэлектрического датчика при перемещении объекта на расстояние соответствующее 0, 81, 167 и 249 дискретным единицам, на фиг. 7 - принципиальная схема прибора для визуализации показаний фотоэлектрического датчика, на фиг. 8 - блок-схема дешифратора показаний фотоэлектрического датчика перемещений.
Фотоэлектрический датчик включает корпус 1, установленные на корпусе оптические датчики 2, перфорированную шторку 3, связанную с перемещающимся объектом 4, устройство цифровой визуализации 5 оптических датчиков 2, блок питания 6 и индикатор 7. Оптические датчики состоят из излучателя 8 светового луча 9 и приемника 10 светового луча. Оптические датчики 2, размещены на шторке в трех зонах: зона первого ряда, зона второго ряда и зона третьего ряда. При этом в первом и втором рядах установлено по пять оптических датчиков 2 с шагом S1=12 и S2=10, в третьем ряду три датчика с шагом S3=40 единиц. Размеры световых лучей оптических датчиков 2 установлены по направлению перемещения меньшим, чем 0,6 единиц, а точность их позиционных размеров размещения меньшим, чем 0,1 единиц. Соответственно шторка 3 перфорирована тремя рядами окон 11, 12 и 13 для прохождения светового луча 9. Окна 11 первого ряда выполнены длиной T1=3 дискретных единицы с высокой точностью - не хуже, чем ±0,05 единицы, расположенных с шагом S4=10 единиц, причем точность любого шага и любой суммы этих шагов не хуже 0,1 единицы. Окна 12 второго ряда выполнены длиной Т2=17 с шагом S5=50 единиц. В третьем ряду выполнено одно окно 13 длиной Т3=126. В исходном положении по ходу перемещения объекта 4 осевые смещения окон перфорации шторки относительно оптических осей первых в ряду датчиков установлены: для первого ряда без смещения, а для второго и третьего со смещением ΔT2=4 и ΔT3=110 единиц дискретности соответственно.
Устройство цифровой визуализации 4 (фиг. 7) содержит блок 6 питания, блок 14 приема и обработки информации, полученной от оптического сигнала фотодатчика и полупроводниковый оптический индикатор 7. Блок 14 включает в себя розетку 16, приемник-кодировщик 17 оптического сигнала и блок 18 дешифровки параметров. Розетка 16, состыкованная с вилкой 19, воспринимает электрические сигналы от приемника 10 и передает на приемник-кодировщик 17, который кодирует его в двоичный код Грея. Приемник-кодировщик 17 представляет собой трехкаскадный блок, собранный на базе логических интегральных микросхем 155-ой серии типа К155ЛА2, К155ЛА3, К155ЛА4, К155ЛА6, К155ЛН1, К155ЛР1, с выводом закодированных оптических сигналов двоичного кода на блок 18 дешифровки параметров. Блок 18 дешифровки параметров собран на микросхемах-дешифраторах типа К514ИД2, он преобразует сигналы двоичного кода в семисегментный код и передает их на полупроводниковый оптический индикатор 7. Приемник-кодировщик 17 оптического сигнала и блок 18 дешифровки параметров выполнены трехкаскадными в виде блоков 20, 21 и 22, передающих информацию соответственно в единицах, десятках и сотнях дискретных единиц. Блок 20 первого каскада выполнен в виде приемника-кодировщика оптических сигналов первого ряда считывающих элементов фотодатчика в коды, реализующие логические функции НЕ и 2И-НЕ, и передатчика кодированных сигналов на дешифратор 23, а функцию 2И-НЕ - через микросхему 24 и на блок 21 второго каскада. Блок 21 второго каскада выполнен в виде приемника - кодировщика оптических сигналов второго ряда считывающих элементов датчика в коды, реализующие логические функции 2И-НЕ, 4И-НЕ, 8И-НЕ и 2-2И-2ИЛИ-НЕ, и передатчика кодированных сигналов на дешифратор 25, а функций 2И-НЕ и 2-2И-2ИЛИ-НЕ - через микросхемы 26 и 27 на блок 22 третьего каскада. Блок 22 третьего каскада выполнен в виде приемника-кодировщика оптических сигналов третьего ряда считывающих элементов датчика в коды, реализующие логические функции 3И-НЕ и НЕ, и передатчика кодированных сигналов на дешифратор 28.
Фотоэлектрический датчик линейных перемещений и устройство визуализации цифровой информации работают следующим образом.
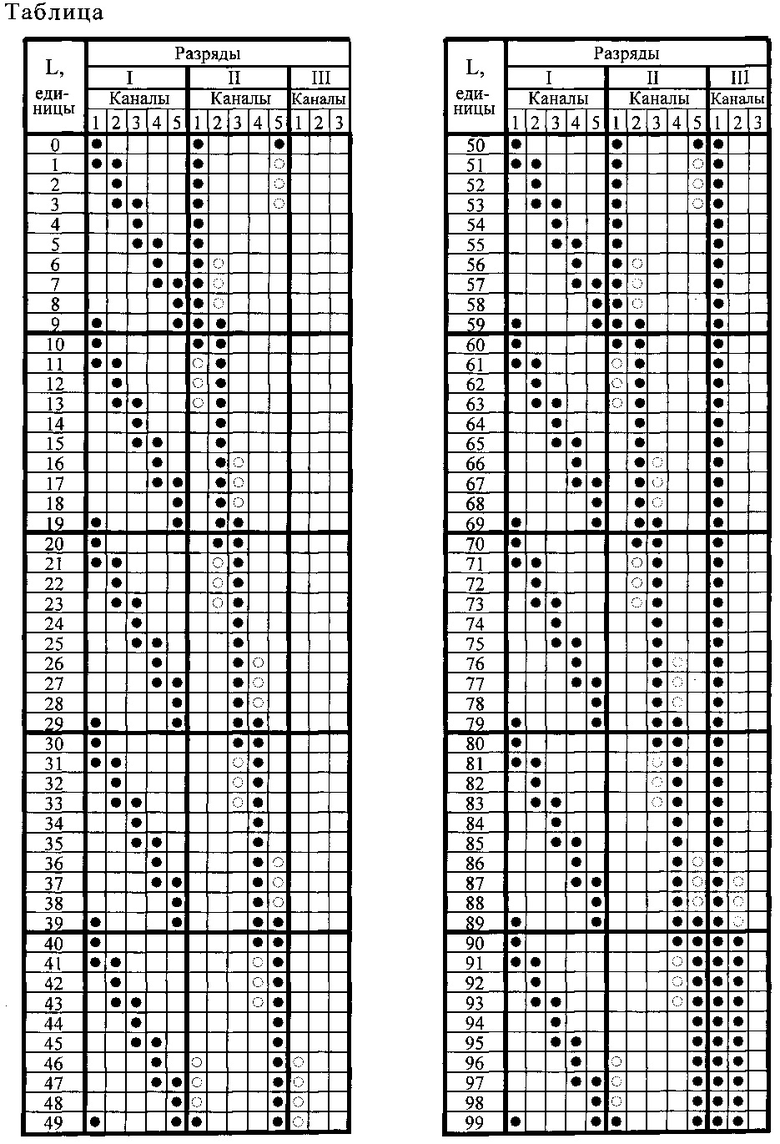
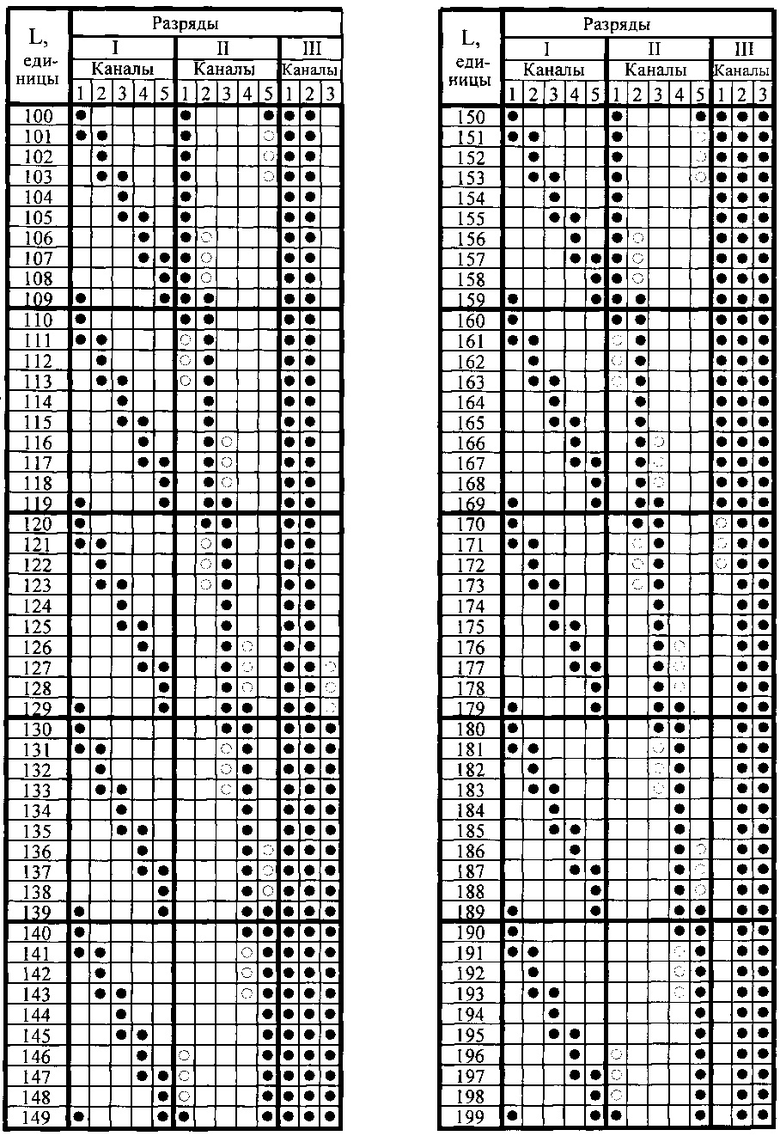
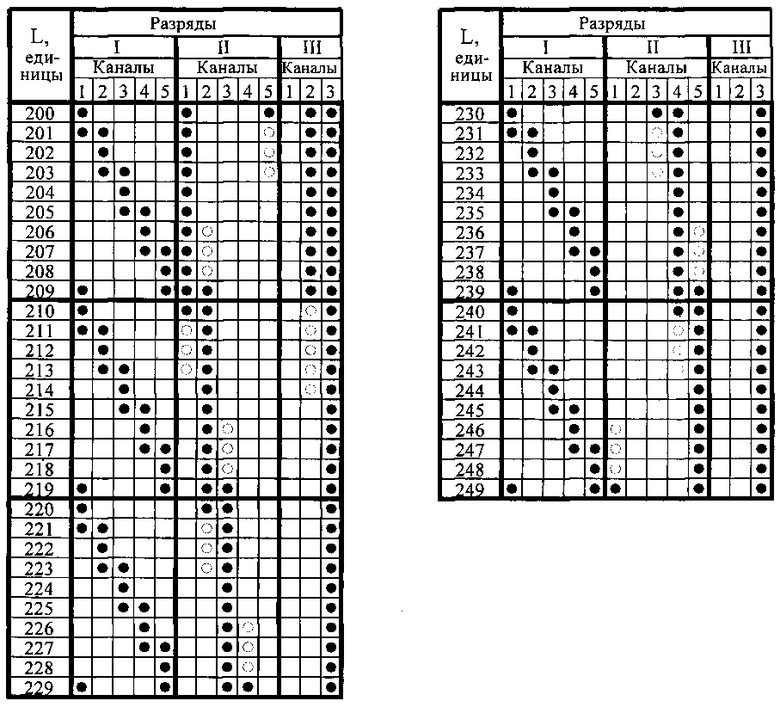
В исходном положении к фотоэлектрическому датчику и устройству визуализации от блока питания 6 подано напряжение 5 В постоянного тока. Шторка 3 соединена с объектом 4. Оптические датчики 2 выдают исходный сигнал, например, соответствующий положению «0» перемещений, указанный на фиг. 3. На чертежах фиг. 3-6 для удобства понимания работы датчика на чертежах корпуса 1 нанесены стрелки 29, а на чертежах шторки нанесены шкалы 30 дискретных единиц. Положению «0» соответствует положение, при котором в первом ряду в открытые окна 11 попадает световой луч 9 (далее по тексту световой луч, пошедший через окно шторки, обозначен С-луч Аб, где А - зона расположения оптических датчиков, б - номер окна) С-луч 11 (первый датчик первого ряда), во втором ряду в открытое окно 12 попадают С-лучи 1 и 5 (первый и пятый датчики второго ряда), в третьем ряду световые лучи 9 всех оптических датчиков перекрыты шторкой 3. В процессе работы устройство блок 18 дешифровки параметров преобразует полученные сигналы оптических датчиков двоичного кода в семисегментный код и передает их на полупроводниковый оптический индикатор 7, блокируя при этом С-лучи светового луча 9, лежащие в зоне погрешности выполнения окон 11 и 12 шторки 3 (на чертежах фиг. 3-6 эти зоны заштрихованы). В таблице эти С-лучи отмечены знаком « ».
».
Эти сигналы представлены в разрядной части (I-каналы 1, 2, 3, 4 и 5; II-каналы 1, 2, 3, 4 и 5; III-каналы 1, 2 и 3) таблицы, а оптический индикатор 7 на своем экране показывает параметры перемещения объекта 4 в цифрах натурального ряда (параметры L таблицы).
Положению «81» соответствует положение, при котором в первом ряду в открытое окно 11 попадают С-лучи 11 и 21 (первый и второй датчики первого ряда), во втором ряду в открытые окна 12 попадают С-луч 32, расположенный в зоне погрешности (этот С-луч блокируется дешифратором 23), и 42 (третий и четвертый датчики второго ряда), в третьем ряду в открытое окно 13 попадает С-луч 13 (первый датчик третьего ряда).
Примечания:
«пустая клетка» - С-луч оптического датчика полностью закрыт,
« » - С-луч оптического датчика полностью открыт,
» - С-луч оптического датчика полностью открыт,
«» - С-луч оптического датчика в любом из предыдущих положений,
«L» - положение шторки относительно корпуса (начального положения).
Положению «167» соответствует положение, при котором в первом ряду в открытые окна 11 попадают С-лучи 41 и 51 (четвертый и пятый датчики первого ряда), во втором ряду в открытые окна 12 попадают С-луч 22 и С-луч 32, расположенный в зоне погрешности, (которая блокируется дешифратором 23), в третьем ряду в открытое окно 13 попадают С-лучи 13, 23, 33 (все датчики третьего ряда).
Положению «249» соответствует положение, при котором в первом ряду в открытые окна попадают С-лучи 11 и 51 (первый и пятый датчики первого ряда), во втором ряду в открытые окна 12 попадают С-лучи 12 и 52 (первый и пятый датчики второго ряда), в третьем ряду в открытое окно попадает С-луч 33 (третий датчик третьего ряда).
Показания измеренных величин с оптического индикатора 7 могут сниматься различными способами: визуально, с помощью фотосъемки экрана, регистрация на компьютер и т.д.
Предложенный фотоэлектрический датчик позволяет производить измерение абсолютных величин линейного перемещения объекта с высокой точностью и обеспечить визуальное снятие информации как невооруженным глазом, так и с помощью инструментальных съемок, с помощью фоторегистраторов и компьютера.
На предприятии изготовлен и испытан с положительными результатами опытный образец фотоэлектрического датчика линейных перемещений.
Предложение рекомендовано к внедрению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ГРАФИЧЕСКИХ ИЗОБРАЖЕНИИ | 1973 |
|
SU373975A1 |
| Устройство для цифровой записи и воспроизведения звука | 1985 |
|
SU1319073A1 |
| СПОСОБ ГРАДУИРОВКИ СПЕКТРА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2119649C1 |
| Устройство для цифровой записи и воспроизведения звука | 1986 |
|
SU1345242A1 |
| ПРИКЛАДНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА | 2005 |
|
RU2304362C2 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 1996 |
|
RU2128890C1 |
| Копировальный аппарат | 1987 |
|
SU1478185A1 |
| СПОСОБ РЕГИСТРАЦИИ ФАЗЫ КВАДРАТУРНЫХ СИГНАЛОВ | 2018 |
|
RU2692965C1 |
| МОЩНЫЙ ИМПУЛЬСНО-ПЕРИОДИЧЕСКИЙ ЛАЗЕР С НЕУСТОЙЧИВЫМ РЕЗОНАТОРОМ | 1985 |
|
SU1839868A1 |
| Устройство для цифровой записи и воспроизведения звуковых сигналов | 1986 |
|
SU1411816A1 |
Группа изобретений относится к измерительной технике и может быть использована для измерения абсолютных величин линейных перемещений в различных отраслях машиностроения. Фотоэлектрический датчик включает корпус, оптические датчики, перфорированную шторку, устройство цифровой визуализации оптических датчиков, блок питания и индикатор. Оптические датчики состоят из излучателя светового луча и приемника светового луча и размещены в трех зонах. Для дешифровки сигналов оптических датчиков в устройстве цифровой визуализации оптического сигнала приемник-кодировщик оптического сигнала выполнен в виде трехкаскадного блока с выводом раскодированных логических сигналов двоичного кода, преобразованных в семисегментный код, на полупроводниковый оптический индикатор линейных перемещений. Технический результат: упрощение конструкции при сохранении высокой точности измерений абсолютных величин линейных перемещений и снижение трудоемкости обработки результатов измерений. 2 н.п. ф-лы, 8 ил., 1 табл.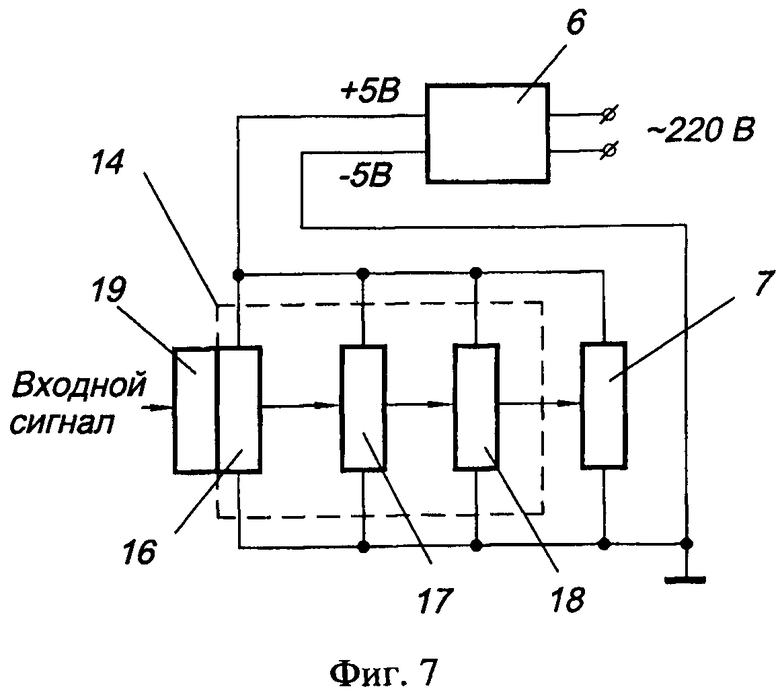
1. Фотоэлектрический датчик линейных перемещений, содержащий корпус, перфорированную шторку, закрепленную на объекте перемещений, оптические датчики, включающие излучатель и приемник светового луча, отличающийся тем, что оптические датчики на корпусе с соответствующими окнами перфорации на шторке размещены по разрядам в три ряда по направлению перемещения объекта, при этом в первом и втором рядах установлено по пять датчиков с шагом 12 и 10 соответственно, в третьем ряду три датчика с шагом 40 единиц дискретности, при этом размеры световых лучей оптических датчиков установлены по направлению перемещения меньше чем 0,6 единиц, а точность их позиционных размеров размещения меньше чем 0,1 единиц, соответствующие окна перфорации на шторке выполнены: для первого ряда - длиной 3 с точностью не хуже чем ±0,05 единицы и шагом 10, причем точность любого шага и любой суммы этих шагов не хуже 0,1 единицы, для второго ряда - длиной 17 и шагом 50 единиц, для третьего ряда - одно окно длиной 126 единиц, кроме того, в исходном положении по ходу перемещения осевые смещения окон перфорации шторки относительно оптических осей первых в ряду датчиков установлены: для первого ряда без смещения, а для второго и третьего со смещением 4 и 110 единиц дискретности соответственно.
2. Фотоэлектрический датчик по п. 1, отличающийся тем, что он снабжен устройством цифровой визуализации измеренных величин линейных перемещений, выполненным в виде прибора, снабженного блоком питания, приемником-кодировщиком оптического сигнала в двоичный код Грея, блоком дешифровки и индикатором показаний, при этом приемник-кодировщик оптического сигнала выполнен в виде трехкаскадного блока с выводом раскодированных логических сигналов двоичного кода, преобразованных в семисегментный код, на полупроводниковый оптический индикатор линейных перемещений, при этом:
- блок первого каскада выполнен в виде приемника-кодировщика оптических сигналов первого ряда считывающих элементов датчика в коды, реализующие логические функции НЕ и 2И-НЕ, и передатчика кодированных сигналов на дешифратор, а функцию 2И-НЕ - на блок второго каскада;
- блок второго каскада выполнен в виде приемника-кодировщика оптических сигналов второго ряда считывающих элементов датчика в коды, реализующие логические функции 2И-НЕ, 4И-НЕ, 8И-НЕ и 2-2И-2ИЛИ-НЕ, и передатчика кодированных сигналов на дешифратор, а функций 2И-НЕ и 2-2И-2ИЛИ-НЕ - и на блок третьего каскада;
- блок третьего каскада выполнен в виде приемника-кодировщика оптических сигналов третьего ряда считывающих элементов датчика в коды, реализующие логические функции 3И-НЕ и НЕ, и передатчика кодированных сигналов на дешифратор.
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ВЕЛИЧИНЫ УГЛА ПОЛОЖЕНИЯ ВАЛА | 1997 |
|
RU2133986C1 |
| КОДОВАЯ ШКАЛА | 2014 |
|
RU2560782C1 |
| Устройство для регулирования скорости объекта | 1984 |
|
SU1251039A1 |
| US 20060249665 A1, 09.11.2006. | |||

