Изобретение относится к системам автоматического регулирования н может быть использовано Б устройствах требующих линейных перемещений с заданными скоростями в частности в устройствах для прецизионных координатных измерений при обработке данных физического экспер1И1 -зента«
Цель изобретения - повьапение точности регулирования на малых скоростях и упрощение устройства,,
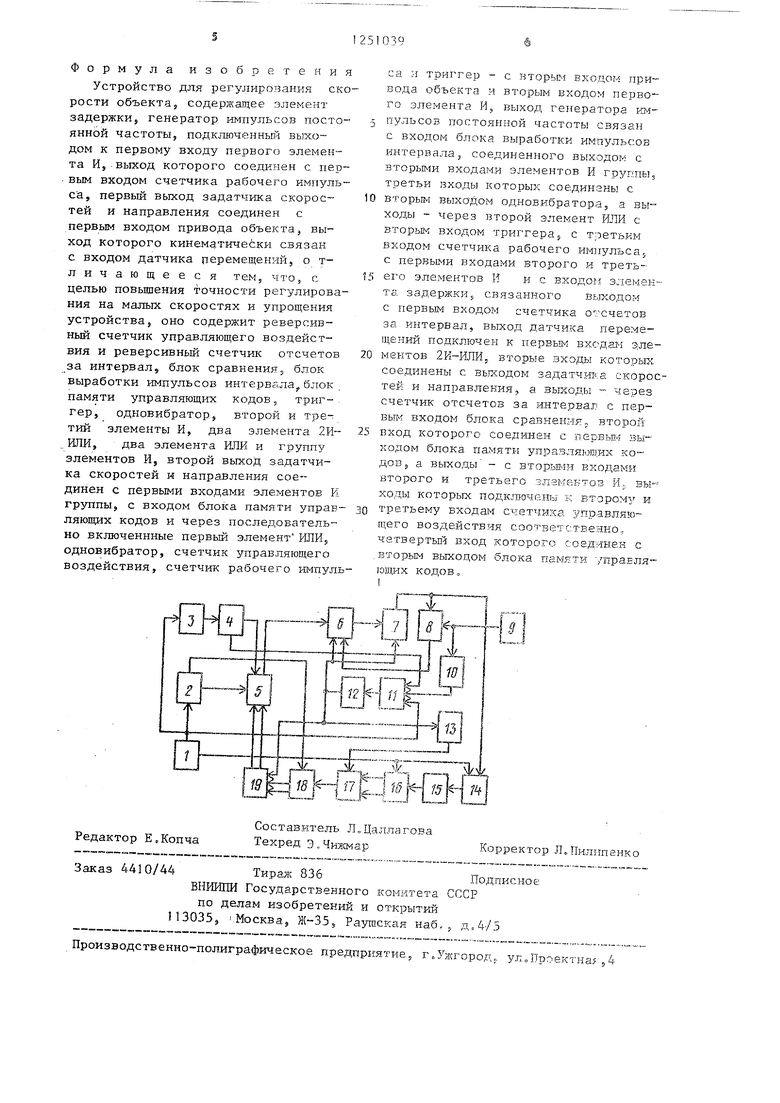
На чертеже изображена блок-схема устройства.
Устройство содерлшт задатчрж 1 скоростей и направленияJ блок 2 памяти управляющих кодов первый элемент ИЛИ 3, одновибратор 4,, реверсивный счетчик 5 управляющего воздействия, счетчик 6 рабочего импульса, триггер 7, первый элемент И 8,, генератор 9 импульсов постоянной частоты,, блок 10 выработки импуль-- сов интервала, группу 1 1 . элементов второй элемент ИЛИ 12 элемент 13 задержки, привод 14 объекта, датчике 15 перемещений, первый и второй элементы 2И-ИЛИ 16, реверсивный счетчи 7 отсчетов за интервал блок 18 сравнения,, второй и третий элементы
И 19.
Задатчик I скоростей и направлен имеет две группы выходных пюн. Перв группа шин - это выходы сигналов на равлен1-1яJ например вперед,, назад, Выходы сигналов направления задат- чика I соединены с вторымрз входами элементов 2И-ШШ 16 и входами первой группы привода 14 объекта,, Вторая группа шин задатчика 1 -- это вы хо,п;ы сигналов скоростиj которые могут быть представлены в гюзици:онном двоичном коде, коде Грея к т„д. Выходы сигналов скорости задатчика I соединены с входами блока 2 памят управляющих кодов, первого элемента ИЛИ 3 и первыми входами соответствующих элементов И I 1 ,
Каждой скорости в задатчике 1 ставится в соответствие код управляющего воздействия и код приращения счетчика отсчетов за интервал,, Эти коды хранятся в блоке 2 памяти управляющих кодовэ которьй может быть вьшолнен на стандартных микросхемах ШЗУ, например т%тл SN74288,, При этом адресные входы ППЗУ соединяются с выходами скоростей эадат- чика 1, Скорости в этом слз чае
0
5
долкны быть представлены в двоичном коде.
Блок 2 памяти управляющих кодов может быть реализован также на осно- стандартных микросхем типа И-НЕ, И-ИЛИ например3 155 ЛАЗ 155 ЛР1 PI других, в этом случае скорости быть представлены в позидион-- ном коде„
Бы-ходные шины блока 2 памяти управляющих кодов разделены па две группы Первая группа шин соединена с вторьлу входом блока 18 сравнения, а вторая группа с установочньми входами счетчика 5 управляющего воз действия.
Выход первого элемента ИЛИ 3 подключен к входу одновибратора 4; выход которого подключен к зходу разрешения приема кода в счетчик 5 управляющего воздействия, Инверсный вьгход одновибратора 4 соединен с треты-ии входами элементо з И группы I К
Информационные выходы счетчика 5 управляющего воздействия соединены с установочными входами счетчика 6 рабочего импульса, ЕЫХОД импульса заема которого соединен с входом становки нуля триггера 7; а выход последнего соединен с вторьм входом первого элемента И 8 и вторым входом привода 14 объекта,,
Выход генератора 9 ш тульсов постоянной частоты соединен с первьм входом первого элемента И 3 .и входом блока 10 выработки импульсов интервала,, Выход первого элемента И 8 соединен с вьгаитаюш .им входом счетчика 6 рабочего импульса.
Блок 0 выработки импульсов интервала состоит кз схем деления частоты и формирователей импульсов интервал ао
Блок 10 может быть реализован на стандартных микросхемах, на.пример 155 ИЕ 2, 155 ИЕ4, 155 Ж5, 155 АГЗ. Блок О выработки импульсов интервала имеет столько выходов, сколь- ко различных частот используется для выработки сигнала рассогласова -- ния. Выходь блока 10 подключены к вторьтм входам элементов И группы I 1 с
Выходы элементов И группы через второй элемент ИЛИ 12 подклк1че- ны входу установки единицы триг- гара 7; входу разрешения приема кода в счетчике б рабочего импульсвз первому входу sTopoi o и третьего
. . 3
элементов И 19 и через элемент 13 задержки к входу установки нуля счетчика 17 отсчетов за интервал.
Привод 14 объекта состоит из двигателя постоянного тока, . силовой мостовой схемы и источника питания двигателя. Двигатель привода 14 объ екта кинематически связан с датчиком 15 перемещений, который имеет две выходные шины. На одной шине импульсы вырабатываются при движении объекта5 например вперед, на другой - при перемещении объекта в противоположную сторону.
Выходы датчика перемещений подключены к первым входам элементов 2И-ИЛИ 16, В качестве элементов могут быть использованы стандартные микросхемы типа 155 ЛР1,
Выходы элементов 2И-ИЛИ 16 подключены к суммирующему и вычитающему входам счетчика I7 отсчетов за интервал, информационные выходы ко- торого подключены к первым входам блока 18 сравнения.
Блок 18 сравнения имеет три выхода: коды на первом и втором входах равны, первьш код больше второго и ..первый код меньше второго. Блок 18 сравнения может быть реализован на стандартных микросхемах типа 155 СП1 Выходы Больше и Меньше блока 18 сравнения соединены с вторыми входами второго и третьего элементов И 19, выходы которых соединены с суммирующим и вычитающим входами счетчика 5 управляющего воздействия.
Устройство работает следующим образом.
Пусть в задатчике скоростей и на равлении задано направление перемещения объекта и установлен код скорости.
Сигнал направления подготавливает соответствующие цепи в силовой мостовой схеме привода 14 объекта. По коду скорости в блоке 2 памяти управляющих кодов осуществляется выборка кода управляющего воздействия, который поступает на вход счет чика 5 управляющего воздействия, и кода приращения счетчика отсчетов з интервал, которьй поступает в блок 18 сравнения.
В момент задания скорости одно- вибратор 4 вырабатывает импульс, по которому код управляющего воздействия принимается в счетчик 5, По им510394
пульсу интервала, если он не совпадает с импульсом одновибратора 4, на выходе второго элемента ИЛИ 12 вырабатывается импульс, который ус- 5 танавливает в единичное состояние триггер 7 и разрещает прием кода из счетчика 5 управляющего воздействия в счетчик 6 рабочего импульса. Сигнал с триггера 7 открывает
JO подготовленное сигналом направления соответствующее плечо силовой мостовой схемы, на двигатель привода 14 поступает рабочий импульс, и объект начинает двигаться.
2 Одновременно сигнал с триггера 7 открывает элемент И 8, импульсы с генератора 9 постоянной частоты поступают на вычитающий вход счетчика 6 рабочего импульса. ,
2Q Импульсы с датчика 15 перемещений поступают на один из входов реверсивного счетчика 17 отсчетов за интервал. На суммирующий вход счетчика 17 импульсы поступают в том слу5. чае, если знак импульса перемещения совпадает с заданным направлением. В противном случае импульсы поступают на вычитающий вход счетчика 17 отсчетов за интервал,- Роль коммутатора импульсов перемещения вьшолня-
0
ют элементы 2И-ИЛИ 16,
Когда счетчик 6 рабочего импульса установится в нулевое состояние, импульсом заема триггер 7 сбрасы- вается. Рабочий импульс снимается с двигателя.
Код в счетчике 17 отсчетов за интервал постоянно сравнивается с заданным в блоке 18 сравнения. Если в момент импульса интервала коды на входах блока 18 равны, то длительность рабочего импульса не изменяется. Если код в счетчике 17 отсчетов за интервал меньше заданиого, то содержимое счетчика 5 .управляющего воздействия увеличивается на единицу. Следовательно, в следующем интервале длительность рабочего импульса будет увеличена на один такт генератора 9. Если код в счетчике 17 отсчетов за интервал больше заданного, то содержимое счетчика 5 управляющего воздействия уменьшается на единицу, В следующем интервале длительность рабочего импульса будет уменьшена на один такт задающе ;го генератора.
Формула изобретения
Устройство для регулирования скорости объекта, содержащее элемент задержки, генератор импульсов постоянной частоты, подключенный выходом к первому входу первого элемента И, выход которого соединен с первым входом счетчика рабочего импуль- с а, первый выход задатчика скоростей и направления соединен с первым входом привода объекта выход которого кинематически связан с входом датчика перемещений, о т- личающееся тем, что, с целью повьшения точности регулирования на малых скоростях и упрощения устройства, оно содержит реверсивный счетчик управляющего воздействия и реверсивный счетчик отсчетов за интервал, блок сравненияэ блок выработки импульсов интервала блок. памяти управляющих кодов, триггер, одновибратор, второй и третий элементы Hj два элемента 2И-- ИЛИ, два элемента ИЛИ и группу элементов И, второй выход задатчика скоростей и направления соединен с первыми входами элементов И группы, с входом блока памяти управляющих кодов и через последовательно Бключеннные первый элемент ИЛИ, одновибратор, счетчик управляющего воздействия, счетчик рабочего импулса и триггер - с вторьп-- входом привода объекта и BTOPEJM входом первого элемента И, выход генератора импульсов постоянной частоты связан с входом блока выработки импульсов интервалаэ соединенного выходом с вторьЕМи входами элементов И группы, третьи входы которых соединены с
вторым выходом одновибратора, а выходы через второй элемент ИЛИ с вторым входом триггера, с третьим входом счетчика рабочего импульса5 с первыми входами второго и третьего элементов И и с входом элемер;-задержки5 связанного
вьпсодом
с первым входом счетчика отсчетов за интервал, выход датчика перемещений подключен к первьа ; вхсда1п э.лементов ZK-IUIM, вторые входы которых соединены с выходом задатчика скоростей и направления,, а выходы - через счетчик отсчетов за интервал с пер- вык входом блока сравнения„ второй
вход которого соединен с первьм выходом блока памяти упра/зляющих кодов, а выходы - с BTopbE iH входами второго и третьего з-лакектоз И, вы ходы которых подключены к второму и
третьему входам счетчика управляющего воздейств ;{я соответственно, четвертьп1 вход которого соединен с вторым выходом блока памяти /правля- ющих кодов,
Редактор Е.Копча Заказ 4410/44
Составитель Л„Цаллагова Техред Э,, Чилшар
Корректор
Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, .Москва, Ж-ЗЗ, Раушская наб. .,
Производсгвенно-полиграфическое предприятие, гЛ лсгород,. уЛоПроектнаг 4
Корректор ЛоНилипенко
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное временное устройство | 1988 |
|
SU1647517A1 |
| Устройство для исследования пульсовой динамики сердечно-сосудистой системы | 1987 |
|
SU1512561A1 |
| Программное временное устройство | 1987 |
|
SU1446601A1 |
| Устройство для ввода информации | 1987 |
|
SU1529231A1 |
| Многоканальное устройство для контроля параметров | 1987 |
|
SU1444714A1 |
| Устройство для входного контроля изделий | 1989 |
|
SU1619313A1 |
| Устройство для контроля работы дегазационных скважин | 1978 |
|
SU779586A1 |
| Система для программного управления | 1985 |
|
SU1325409A1 |
| Устройство для программного управления намоточным станком | 1987 |
|
SU1451648A1 |
| Устройство для измерения температуры | 1989 |
|
SU1679221A1 |
Изобретение относится к системам автоматического регулирования и может быть использовано в устройствах, требующих линейных перемещений с заданными скоростями. Устройство решает задачу повьппения точности регулирования на малых скоростях и упрощения устройства. Устройство содержит задатчик скоростей и направления, счетчики управляющего воздействия, рабочего импульса, при-, ращений за интервал, генератор им-, пульсов постоянной частоты, блоки сравнения и выработки импульсов интервала, память управляющих кодов, логические элементы, датчик перемещений и привод объекта. 1 ил. СП
| Система регулирования скорости электропривода постоянного тока | 1980 |
|
SU920652A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для стабилизации скорости перемещения каретки подвижного зеркала интерферометра | 1979 |
|
SU954811A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
