Изобретение относится к буровой технике и может быть использовано при бурении скважин, а именно наклонно-направленных скважин с протяженным горизонтальным участком.
Известен шарнирный переводник для бурения наклонно-направленных скважин, содержащий корпус и полый вал со сферической опорной пятой, снабженные контактирующими элементами для передачи крутящего момента, например зубьями, сферические подпятники, установленные в корпусе, уплотнительный элемент. Устройство снабжено установленным в корпусе полым штоком с уплотнением, хвостовик которого размещен в полости полого вала, а уплотнительный элемент размещен на хвостовике штока на расстоянии не более 1/4 радиуса уплотняемой поверхности от плоскости, проходящей через центр сферы опорной пяты и перпендикулярной оси полого вала (патент РФ №2192535 от 10.11.2002).
Недостатком известного шарнирного переводника является низкая точность позиционирования долота, вследствие того, что нет возможности изменять направление бурения долота с поверхности.
Известен блок отклонения системы наклонно-направленного бурения, содержащий корпус, размещенный в корпусе вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса. Блок снабжен исполнительным органом, размещенным в корпусе, включающий механизм перемещения, клин-отклонитель и датчик перемещения. Механизм перемещения содержит насос, регулирующий клапан, поршень и цилиндр. Механизм перемещения установлен с возможностью перемещения клина-отклонителя в обе стороны с обеспечением отклонения вала от оси корпуса (патент РФ №2603148, опубл. 10.04.2016). Данный блок принят за прототип.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения: корпус, имеющий ось; размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса; исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса.
Недостатком известного блока отклонения системы наклонно-направленного бурения, принятого за прототип, является отсутствие радиального подшипника на ведомом валу, которое приводит к восприятию нагрузки в процессе бурения ступенчатыми клиньями и их повышенному износу, вследствие этого происходит снижение точности позиционирования долота и быстрый выход из строя элемента повышенной ответственности. Кроме того, отсутствие указанного подшипника ведет к нагрузке на шарнир и повышенному износу его уплотнений, что также снижает надежность известного блока. Недостатком также является наличие одного шарнира на валу долота, что приводит к смещению оси долота в торце относительно устройства, что, в свою очередь, приводит к повышенной нагрузке на торцевые уплотнения, а также на боковую стенку долота.
Задачей предлагаемого изобретения является повышение надежности блока отклонения системы управления буровым устройством, повышение точности позиционирования долота для проведение скважины по заданной траектории.
Поставленная задача была решена за счет того, что в известном блоке отклонения системы управления буровым устройством, включающем корпус, имеющий ось, размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса, исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса, согласно изобретению вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами, ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса, исполнительный орган содержит три клина-отклонителя и три датчика перемещения, механизм перемещения исполнительного органа выполнен в виде трех шаговых двигателей, расположенных под углом 120 градусов друг относительно друга, при этом каждому шаговому двигателю соответствует клин-отклонитель, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса, и на каждом клине-отклонителе установлен датчик перемещения.
Признаки заявляемого технического решения, отличительные от прототипа, - вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами; ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса; исполнительный орган содержит три клина-отклонителя и три датчика перемещения; механизм перемещения исполнительного органа выполнен в виде трех шаговых двигателей, расположенных под углом 120 градусов друг относительно друга; каждому шаговому двигателю соответствует клин-отклонитель, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса; на каждом клине-отклонителе установлен датчик перемещения.
Наличие в конструкции блока двух шарниров на валу и установка на ведомом валу радиально-упорного подшипника вблизи торца корпуса позволяют предотвратить отклонение вала вблизи торца блока, снизить нагрузки на шарниры, возникающие в процессе бурения. В результате увеличивается срок службы уплотнений и повышается надежность блока отклонения системы управления буровым устройством.
Благодаря исполнительному органу, содержащему три шаговых двигателя, расположенных под углом 120 градусов друг относительно друга, при этом каждому двигателю соответствует клин-отклонитель с установленным на нем датчиком перемещения, обеспечивается более точное позиционирование долота, которое, в свою очередь, исключает боковое давление на режущую стенку долота.
Заявителю неизвестно использование в науке и технике отличительных признаков блока отклонения системы управления буровым устройством с получением указанного технического результата.
Предлагаемый блок отклонения системы управления буровым устройством иллюстрируется чертежами, представленными на фиг. 1-3.
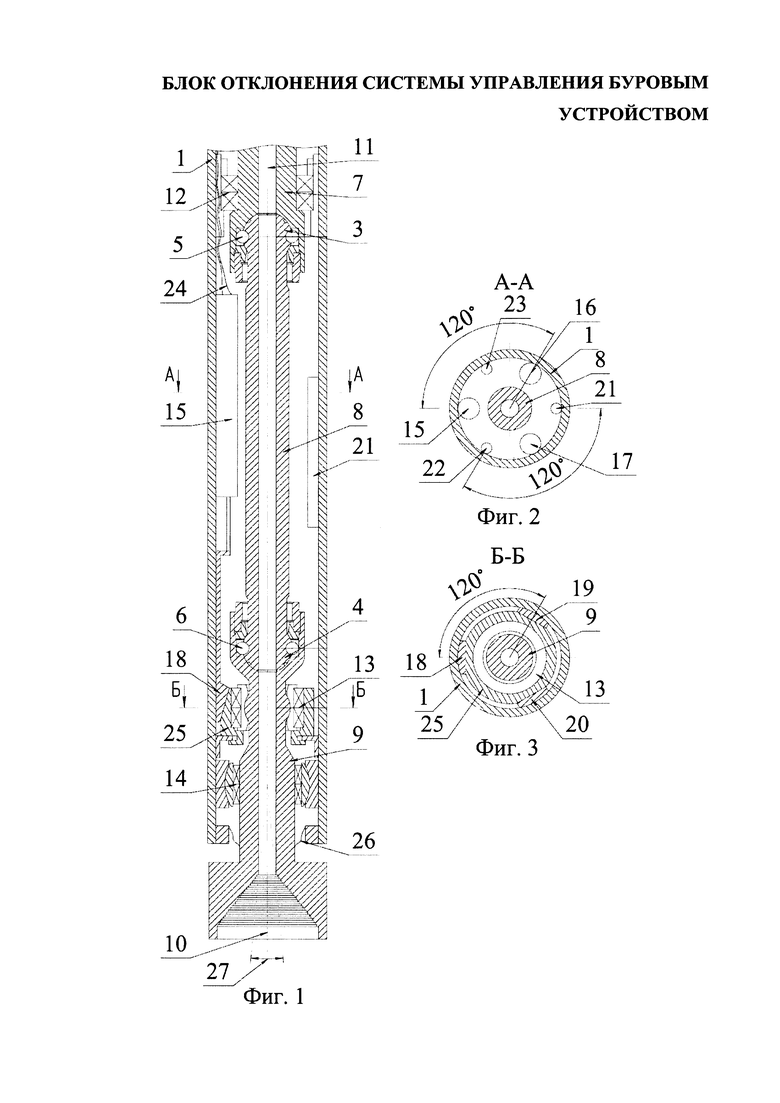
На фиг. 1 представлен разрез блока отклонения.
На фиг. 2 показано сечение А-А.
На фиг. 3 показано сечение Б-Б.
Блок отклонения системы управления буровым устройством включает корпус 1. В корпусе 1 размещен с возможностью вращения вал, содержащий шарниры 2, 3 и шпонки 4-5. Вал состоит из ведущего 6 вала, промежуточного 7 вала и ведомого 8 вала.
Шаровые шарниры 2, 3 обеспечивают отклонение оси 9 долота относительно оси 10 корпуса блока отклонения, шпонки 4 передают крутящий момент с ведущего 6 вала, поддерживаемого подшипником 11 при вращении, на промежуточный 7 вал, а шпонки 5 передают крутящий момент с промежуточного 7 вала на ведомый 8 вал.
Ведомый 8 вал снабжен радиально-упорными подшипниками 12, 13.
Исполнительный орган содержит механизм перемещения, выполненный в виде трех шаговых двигателей 14-16 (фиг. 2), расположенных под углом 120 градусов друг относительно друга, три клина-отклонителя 17-19 (фиг. 1, 3) и три датчика перемещения 20-22 (фиг. 1, 2). При этом каждому шаговому двигателю 14-16, управляемому цепью 23 соответствует клин-отклонитель 17-19, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса 10. На каждом клине-отклонителе 17-19 установлен датчик перемещения 20-22 для определения бокового положения и/или смещения клина-отклонителя.
Клинья-отклонители 17-19 взаимодействуют с подклинком 24, в который входит ведомый вал 8. Радиально-упорный подшипник 12 установлен на ведомом 8 валу для его поддержания при вращении в подклинке 24. Радиально-упорный подшипник 13 установлен на ведомом валу 8 вблизи торца корпуса 1. На торце корпуса 1 размещены уплотнители 25 для защиты внутреннего пространства корпуса 1 от бурового раствора и выбуренной породы.
Позицией 26 на фиг. 1 показан диапазон изменения направления долота.
Устройство работает следующим образом.
Блок отклонения системой управления буровым устройством используется для направленного бурения с постоянным контролем положения долота и вращением бурильной колонны. Изменение направления бурения долота 26 осуществляется из удаленного места посредством телеметрических устройств и достигается следующим образом: на шаговые двигатели 14-16 через управляющую цепь 23 передается команда для установки требуемого направления долота, которые перемещают клинья-отклонители 17-19 вдоль корпуса 1 блока на соответствующее (требуемому направлению) расстояние, в результате чего осуществляется боковое смещение подклинка 24 и ведомого 8 вала, расположенного в нем, относительно корпуса 1 блока, соответственно ось долота смещается относительно оси 10 устройства. Благодаря наличию второго шарнира 3 на валу, становится возможным установить радиально-упорный подшипник 13 вблизи торца устройства, что снижает нагрузки, возникающие в процессе бурения, а также увеличивает продолжительность работы уплотнений 25. В результате повышается надежность устройства. Для удобства определения бокового положения и/или смещения клиньев-отклонителей 17-19 (фиг. 3) применяются датчики перемещения 20-22. После бурения изогнутой части ствола скважины с отклонением долота предлагаемым блоком можно прекратить процесс отклонения путем передачи соответствующего сигнала в исполнительный орган для перемещения клиньев-отклонителей 17-19 шаговыми двигателями 14-16 в нейтральное положение, которому соответствует совпадение осей 10 корпуса блока и вала, и соответственно оси долота 9, после чего осуществить бурение прямолинейной части скважины. Таким образом, осуществляется точное позиционирование долота для направленного бурения изогнутых участков ствола скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БУРОВЫМ УСТРОЙСТВОМ ДЛЯ РАЗРАБОТКИ ТРУДНОДОСТУПНЫХ ЗАПАСОВ УГЛЕВОДОРОДОВ | 2018 |
|
RU2681053C1 |
| Устройство для создания осевого усилия на долото при бурении горизонтальных скважин | 2021 |
|
RU2777048C1 |
| СИСТЕМА НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2603148C2 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ РАБОТЫ БУРОВОГО СТАВА В НАКЛОННОЙ СКВАЖИНЕ | 1994 |
|
RU2109125C1 |
| Забойный двигатель с гидравлическим регулятором (варианты) | 2019 |
|
RU2741297C1 |
| РОТОРНАЯ УПРАВЛЯЕМАЯ СИСТЕМА С ЭЛЕКТРОПРИВОДОМ ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДОЛОТА | 2017 |
|
RU2690238C1 |
| РЕДУКТОР ЗАБОЙНОГО ДВИГАТЕЛЯ | 2019 |
|
RU2723807C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ СКВАЖИНЫ | 2024 |
|
RU2837757C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ С ОТБОРОМ КЕРНА | 2024 |
|
RU2832393C1 |
| НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО БУРОВОГО ИНСТРУМЕНТА ДЛЯ СЕЛЕКТИВНОГО ВХОДА В БОКОВОЙ СТВОЛ | 2017 |
|
RU2657583C1 |
Изобретение относится к буровой технике и может быть использовано при бурении скважин, а именно наклонно-направленных скважин с протяженным горизонтальным участком. Блок отклонения системы управления буровым устройством включает корпус, имеющий ось, размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса, исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса. Вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами. Ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса. Исполнительный орган содержит три клина-отклонителя и три датчика перемещения. Механизм перемещения исполнительного органа выполнен в виде трех шаговых двигателей, расположенных под углом 120 градусов друг относительно друга. Каждому шаговому двигателю соответствует клин-отклонитель, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса, и на каждом клине-отклонителе установлен датчик перемещения. Обеспечивается повышение надежности блока отклонения системы управления буровым устройством, повышение точности позиционирования долота для проведения скважины по заданной траектории. 3 ил.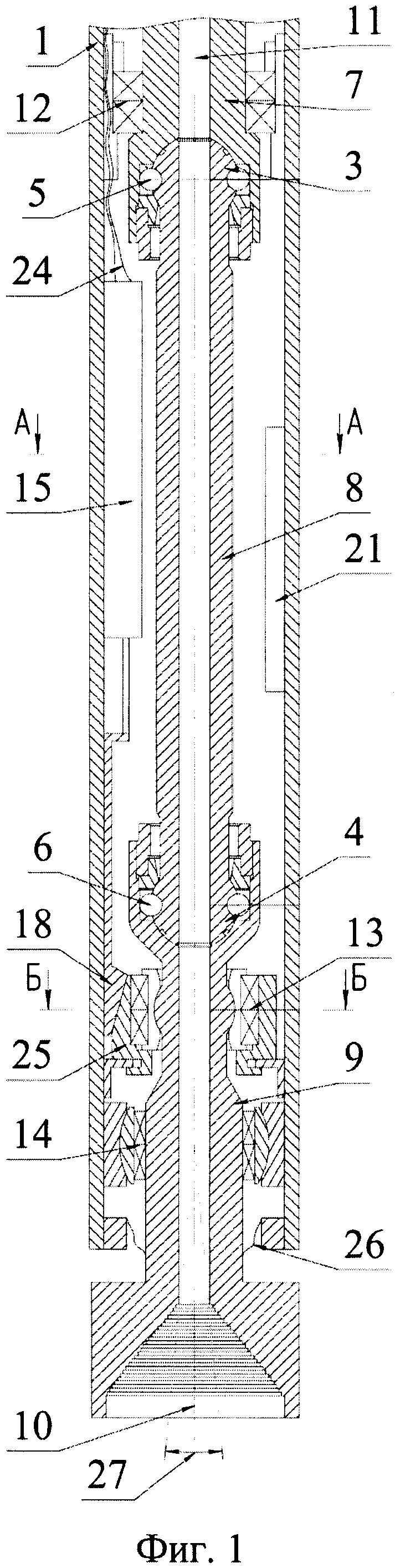
Блок отклонения системы управления буровым устройством, включающий корпус, имеющий ось, размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса, исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса, отличающийся тем, что вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами, ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса, исполнительный орган содержит три клина-отклонителя и три датчика перемещения, механизм перемещения исполнительного органа выполнен в виде трех шаговых двигателей, расположенных под углом 120 градусов друг относительно друга, при этом каждому шаговому двигателю соответствует клин-отклонитель, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса, и на каждом клине-отклонителе установлен датчик перемещения.
| СИСТЕМА НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2603148C2 |
| ШАРНИРНЫЙ ОТКЛОНИТЕЛЬ | 2000 |
|
RU2179226C2 |
| ШАРНИРНЫЙ ПЕРЕВОДНИК | 2001 |
|
RU2192535C1 |
| US 5875859 A1, 02.03.1999 | |||
| US 6216802 B1, 17.04.2001 | |||
| US 6659201 B2, 09.12.2003. | |||

