Изобретение относится к буровой технике и может быть использовано при бурении скважин, а именно наклонно-направленных скважин с протяженным горизонтальным участком, в частности, для разработки труднодоступных запасов углеводородов.
Известно устройство управления направленным бурением наклонных скважин, включающее забойный двигатель, соединенный шарнирным соединением с долотом, пульт управления буровой установки и связанный с ним скважинный блок для создания осевого отклонения. Скважинный блок для создания осевого отклонения снабжен последовательно соединенными автономной системой передачи информации, формирователем импульсов управления и тиристорным блоком и установленным на валу долота электрогенератором, индуктор которого с постоянными магнитами расположен на валу между долотом и шарнирным соединением, а каждый полюс обмотки якоря соединен со встречно включенными тиристорами тиристорного блока, управляемые входы которых соединены с выходом формирователя импульсов управления, а каждый полюс якоря электрогенератора имеет две взаимно перпендикулярные обмотки, при этом вход автономной системы передачи информации соединен с выходом пульта управления буровой установки (патент РФ №2123108 от 10.12.1998).
Недостатком известного устройства является низкая точность позиционирования долота, которая обусловлена регулированием угла отклонения только в двух взаимно перпендикулярных направлениях и постоянством величины радиальной отклоняющей силы на вал устройства.
Известно устройство для гидромеханического управления направленным роторным бурением, которое содержит трубчатый корпус, толкатель, трубчатый вал, камеру давления, направляемые штифты, поршень с направляющей дорожкой, имеющей первую, вторую и третью взаимосвязанные направляющие части для зацепления направляемых штифтов, первое смещающее средство, перемещающее поршень, муфту, жестко установленные на муфте кулачки, неподвижно смонтированные в трубчатом корпусе пазы для зацепления с кулачками, второе смещающее средство для перемещения муфты с кулачками в положение зацепления, в котором кулачки и пазы зацепляются друг за друга, кулачки и пазы выполнены с возможностью отсоединения друг от друга, нижняя часть трубчатого корпуса выполнена с искривленной частью, трубчатый вал установлен с возможностью осевого движения внутри трубчатого корпуса и состоит из последовательно герметично соединенных долотного вала, нижнего вала, поршневого вала и верхнего вала. Долотный вал соединен с нижним валом посредством шарнирного соединения. Нижний вал соединен с поршневым валом посредством нижнего шлицевого соединения. Поршневой вал выполняет роль поршня и соединен с верхним валом посредством верхнего шлицевого соединения. Между искривленной частью трубчатого корпуса и долотным валом установлена шаровая опора с возможностью осевого перемещения вместе с долотным валом относительно искривленной части трубчатого корпуса. В шарнирном соединении долотного вала с нижним валом установлен механизм индикации. В корпусе с осевой подвижностью установлен плунжер, образуя с корпусом камеру давления, соединяющуюся с управляемым толкателем (патент РФ №2612403 от 09.03.2017).
Недостатками известного устройства являются необходимость прекращения циркуляции промывочной жидкости в скважине для смены режима работы устройства и слабая индикация режима работы устройства.
Известна роторная управляемая система со скользящей муфтой для бурения скважин. Приводной компонент внутри скользящей переходной муфты бурового инструмента, находящийся во вращательном отношении с отклоняющей оправкой, расположенной с возможностью поворота внутри скользящей переходной муфты инструмента и несущей буровое долото. Генерируют управляющие сигналы направления, в соответствии с которыми гидравлически позиционируют отклоняющую оправку относительно ее шарнирной опоры во время приводного вращения отклоняющей оправки с помощью вращательного приводного компонента для поддержания оси отклоняющей оправки в существенной степени геостационарно и под предварительно определенными углами наклона и азимута. Скользящую переходную муфту инструмента перемещают со скольжением в соприкосновении со стенками ствола скважины во время бурения, предотвращая ее вращение (патент США №6158529 от 11.12.1998).
Недостатком известного устройства является ее сложность, что объясняется наличием гидравлической системы позиционирования вала долота посредством сервоуправляемых поршней, что снижает надежность системы в целом.
Известна система контроля направления вращательной управляемой буровой компоновки с использованием каналов с переменным потоком флюида. Система для контроля направления буровой компоновки в скважине содержит корпус и канал переменного потока флюида. Управляемый флюидом механизм привода находится в гидравлическом соединении с каналом переменного потока флюида. Дополнительно, отклоняющий сердечник может быть подсоединен к выходу управляемого флюидом механизма привода. Отклоняющий сердечник может независимо вращаться относительно корпуса. В определенных вариантах осуществления, система может также включать в себя вал долота, подвижно соединенный с корпусом. Вал долота может быть соединен эксцентричной приемной частью отклоняющего сердечника, и корпус может быть выполнен с возможностью передавать крутящий момент на вал долота. Вал долота может быть соединен с буровым долотом, и крутящий момент, переданный корпусом на вал долота, может приводить в движение буровое долото. Управляемый флюидом механизм привода вращает отклоняющий сердечник в противоположном направлении по отношению к корпусу, что поддерживает угловую ориентацию отклоняющего сердечника, вала долота и бурового долота по отношению к окружающей формации во время буровых операций. Скорость вращения отклоняющего сердечника в противоположном направлении может изменяться путем управления скоростью управляемого флюидом механизма привода. Скорость управляемого флюидом механизма привода управляется путем изменения потока бурового флюида в канале переменного потока флюида, с которым управляемый флюидом механизм привода находится в гидравлическом соединении (патент КНР 104812987 (А) от 26.06.2014).
Недостатком известного устройства является сложная система каналов для протекания потока бурового промывочного раствор. Часть каналов имеет достаточно малый проходной диаметр, что приводит к возникновению большого перепада давления на устройстве, ускоренному абразивному износу каналов. Также высок риск засорения данных каналов.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система наклонно-направленного бурения, содержащая корпус, размещенный в корпусе вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса. Система снабжена исполнительным органом, размещенным в корпусе, включающий механизм перемещения, клин-отклонитель и датчик перемещения. Механизм перемещения содержит насос, регулирующий клапан, поршень и цилиндр. Механизм перемещения установлен с возможностью перемещения клина-отклонителя в обе стороны с обеспечением отклонения вала от оси корпуса (патент РФ №2603148 от 20.11.2016 г.). Данная система принята за прототип.
Признаки прототипа, совпадающие с существенными признаками заявляемого изобретения: корпус, имеющий ось; размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира; на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса; исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса.
Недостатком известной системы наклонно-направленного бурения, принятой за прототип, является отсутствие радиального подшипника на ведомом валу, которое приводит к восприятию нагрузки в процессе бурения ступенчатыми клиньями и их повышенному износу, вследствие этого происходит снижение точности позиционирования долота и быстрый выход из строя элемента повышенной ответственности. Кроме того, отсутствие указанного подшипника ведет к нагрузке на шарнир и повышенному износу его уплотнений, что также снижает надежность известной системы. Недостатком также является наличие одного шарнира на валу долота, что приводит к смещению оси долота в торце относительно устройства, что в свою очередь приводит к повышенной нагрузке на торцевые уплотнения, а также на боковую стенку долота.
Задачей предлагаемого изобретения является повышение надежности системы управления буровым устройством, повышение точности позиционирования долота для проведения скважины по заданной траектории.
Поставленная задача была решена за счет того, что известная система управления буровым устройством (СУБУ), включающая корпус, имеющий ось, размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса, исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса, согласно изобретению дополнительно снабжена центратором, жестко соединенным с корпусом, размещенными в корпусе электронным модулем с электрической цепью и вращающимся контактным устройством, соединенным с электронным модулем через электрическую цепь, при этом вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами, причем использованы шарниры, работающие в масляной ванне, ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса, исполнительный орган содержит три клина и три индуктивных датчика перемещения, механизм перемещения исполнительного органа выполнен в виде трех электрических двигателей с планетарными редукторами, расположенных под углом 120 градусов друг относительно друга, при этом каждому электрическому двигателю соответствует клин, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса, и на каждом клине установлен индуктивный датчик перемещения.
Признаки заявляемого технического решения, отличительные от прототипа, - центратор, жестко соединенный с корпусом; размещенные в корпусе электронный модуль с электрической цепью и вращающееся контактное устройство, соединенное с электронным модулем через электрическую цепь; вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами; использованы шарниры для соединения валов, работающие в масляной ванне; ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса; исполнительный орган содержит три клина и три индуктивных датчика перемещения; механизм перемещения исполнительного органа выполнен в виде трех электрических двигателей с планетарными редукторами, расположенных под углом 120 градусов друг относительно друга; каждому электрическому двигателю соответствует клин, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса, и на каждом клине установлен индуктивный датчик перемещения.
Наличие в конструкции системы двух шарниров на валу, работающих в масляной ванне, и установка на ведомом валу радиально-упорного подшипника вблизи торца корпуса позволяют предотвратить отклонение вала вблизи торца системы, снизить нагрузки на шарниры, возникающие в процессе бурения. В результате увеличивается срок службы уплотнений и повышается надежность системы управления буровым устройством.
Благодаря исполнительному органу, содержащему три электрических двигателя, расположенных под углом 120 градусов друг относительно друга, при этом каждому двигателю соответствует клин с установленным на нем индуктивным датчиком перемещения, обеспечивается более точное позиционирование долота, которое в свою очередь исключает боковое давление на режущую стенку долота.
Электронный модуль задает алгоритм работы исполнительного органа и управление электрическими двигателями, исключающее их перегрузку и заклинку.
Центратор обеспечивает удержание корпуса СУБУ от проворота в процессе бурения ствола скважины.
Вращающееся контактное устройство обеспечивает коммутацию цепи, передачу электрических сигналов управления с вращающегося вала на не вращающейся электронный модуль с электрической цепью.
Отличительные признаки в совокупности с известными позволят достичь заявленный технический результат: повышение надежности системы управления буровым устройством, повышение точности позиционирования долота для проведения скважины по заданной траектории.
Заявителю неизвестно использование в науке и технике отличительных признаков системы управления буровым устройством с получением указанного технического результата.
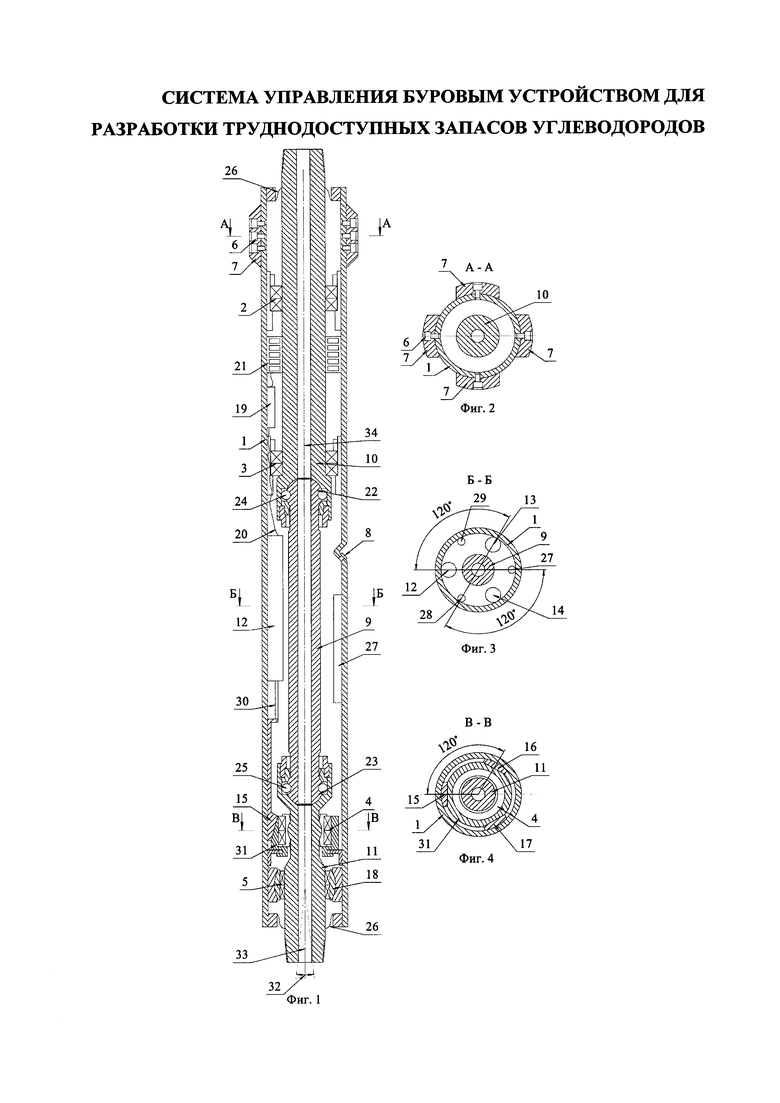
Предлагаемая система управления буровым устройством иллюстрируется чертежами, представленными на фиг. 1 -4. На фиг. 1 представлен разрез СУБУ. На фиг. 2 показано сечение А-А системы. На фиг. 3 показано сечение Б-Б системы. На фиг. 4 показано сечение В-В системы.
Не вращающаяся оболочка СУБУ (фиг. 1) состоит из корпуса 1, в котором размещены подшипники 2-5 для опоры вращающегося вала. На корпусе 1 посредством винтов 6 закреплен центратор 7 (фиг. 2). В корпус 1 ввернуты пробки 8 для заправки внутреннего объема трансмиссионным маслом.
Внутри корпуса 1 размещены вал, состоящий из промежуточного вала 9, ведущего вала 10 и ведомого вала 11, три привода в сборе 12-14 (фиг. 3), расположенных под углом 120 градусов друг относительно друга, для перемещения трех клиньев 15-17 (фиг. 4), сферическая опора 18 с радиально-упорными подшипниками 5 для вращающегося ведомого вала 11, электронный модуль 19 с электрической цепью 20 для управления электродвигателями приводов 12-14, вращающееся контактное устройство 21 для передачи электрических сигналов управления с вращающегося ведущего вала 10 на не вращающийся электронный модуль 11 и трансмиссионным маслом внутри корпуса 1. Вращающийся промежуточный вал 9 через шариковый шарнир 22 соединен с ведущим валом 10, и через шариковый шарнир 23 - с ведомым валом 11. Шариковые шарниры по конструкции являются шарнирами равных угловых скоростей, внутри которых располагаются шарики 24 и 25, через которые передается вращающий момент между валами. Шарниры работают в масляной ванне. Ведущий вал 10 установлен в корпусе 1 на радиально-упорных подшипниках 2 и 3. Герметичность соединений обеспечивается специальными уплотнениями 26. Буровой раствор через СУБУ проходит по внутреннему каналу ведущего вала 10, промежуточного вала 9, и ведомого вала 11.
Привод в сборе 12-14 состоит из электрического двигателя, планетарного редуктора и индуктивного датчика перемещения 27-29 (фиг. 3). Электродвигатель с редуктором размещены внутри герметичного корпуса. Выходной вал планетарного редуктора находится в зацеплении с винтом 30. Винт 30 шипом сцеплен с пазом клина 15-17. При вращении выходного вала планетарного редуктора винт 30 с клином 15-17 перемещаются от минус 30 до плюс 30 мм от среднего положения. На корпус привода 12-14 через планку крепится индуктивный датчик перемещения 27-29, выдвижной шток которого соединен через кронштейн с винтом 30 привода. Три привода в сборе 12-14 удерживаются в корпусе фиксаторами.
Клинья 15-17 взаимодействуют с подклинком 31, в который входит ведомый вал 11. Радиально-упорный подшипник 4 установлен на ведомом 11 валу для его поддержания при вращении в подклинке 31.
Передачу напряжения питания для приводов 12-14, электронного модуля 19 и информации обеспечивает вращающееся контактное устройство 21.
Электронный модуль выполнен в виде электронной печатной платы, содержащей микропроцессорное устройство и обеспечивает управление работой приводов 12-14.
Для центрирования и удержания корпуса 1 от проворота применен центратор 7.
На торцах корпуса 1 размещены уплотнители 26 для защиты внутреннего пространства корпуса 1 от бурового раствора и выбуренной породы.
На фиг. 1 позицией 32 показан диапазон изменения направления долота, позицией 33 показана ось ведомого вала, позицией 34 показана ось корпуса системы.
Устройство работает следующим образом:
Вращение от ротора через бурильные трубы и корпус телеметрической системы передается на ведущий вал 10 (фиг. 1), далее промежуточный вал 9 и ведомый вал 11. Расположенные снаружи корпус 1 и центратор 6 не вращаются, и контактируют со стенкой скважины.
При получении сигнала от телеметрической системы на искривление положения оси ведомого вала 33 электронным модулем 19 формируются управляющие сигналы и подаются на электродвигатели привода 12-14 в заданной полярности. Момент вращения от электродвигателя через планетарный редуктор передается на пару гайка-винт в результате поступательного движения винтов 30. Происходит перемещение клиньев 15-17, которые скользят по поверхности подклинка 31. В результате чего осуществляется боковое смещение подклинка 31 и ведомого 11 вала, расположенного в нем, относительно корпуса 1, соответственно ось вала 33 смещается относительно оси 34 устройства на заданный угол. После отработки, заданного электронным модулем 11 перемещения клиньев 15-17 по сигналам индуктивных датчиков 27-29 происходит разрыв цепи питания и останов электродвигателей. Искривление положения оси вала 33 выполняют только при снятии осевой нагрузки.
После выполнения операции изменения положения оси вала 33, продолжают процесс бурения.
Наличие второго шарнира 23 на валу 9 позволяет установить радиально-упорный подшипник 5 вблизи торца устройства, что снижает нагрузки, возникающие в процессе бурения, а также увеличивает продолжительность работы уплотнений 26. В результате повышается надежность устройства. Для контроля положения клиньев 15-17 (фиг. 3) применяются индуктивные датчики перемещения 27-29. После бурения изогнутой части ствола скважины с отклонением долота предлагаемой СУБУ можно прекратить процесс отклонения путем передачи соответствующего сигнала в исполнительный орган для перемещения клиньев 15-17 электрическими двигателями 12-14 в нейтральное положение, которому соответствует совпадение осей 34 корпуса 1 и соответственно оси ведомого вала 33, после чего осуществить бурение прямолинейной части скважины.
Таким образом, осуществляется точное позиционирование долота для направленного бурения изогнутых участков ствола скважины.
Преимущество изобретения состоит в том, что возможность точного позиционирования долота для направленного бурения позволяет использовать заявляемую систему для разработки труднодоступных запасов углеводородов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для создания осевого усилия на долото при бурении горизонтальных скважин | 2021 |
|
RU2777048C1 |
| БЛОК ОТКЛОНЕНИЯ СИСТЕМЫ УПРАВЛЕНИЯ БУРОВЫМ УСТРОЙСТВОМ | 2017 |
|
RU2655325C1 |
| ПОВЫШЕНИЕ КРУТЯЩЕГО МОМЕНТА ПРИВОДА ЭЛЕКТРОДВИГАТЕЛЯ И СИСТЕМА УПРАВЛЕНИЯ РОТОРНОЙ УПРАВЛЯЕМОЙ СИСТЕМОЙ | 2013 |
|
RU2636984C2 |
| УСТРОЙСТВО ДЛЯ ГИДРОМЕХАНИЧЕСКОГО УПРАВЛЕНИЯ НАПРАВЛЕННЫМ РОТОРНЫМ БУРЕНИЕМ | 2016 |
|
RU2612403C1 |
| СИСТЕМА НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2603148C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ СКВАЖИНЫ | 2024 |
|
RU2837757C1 |
| МОДУЛЬНАЯ УПРАВЛЯЕМАЯ СИСТЕМА РОТОРНОГО БУРЕНИЯ СКВАЖИН МАЛОГО ДИАМЕТРА | 2018 |
|
RU2691194C1 |
| ДОЛОТНЫЙ НАГРУЖАЮЩИЙ КОМПЛЕКС | 2000 |
|
RU2194839C2 |
| МАЛОГАБАРИТНЫЙ ШПИНДЕЛЬ СЕКЦИОННОГО ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2017 |
|
RU2674485C1 |
| УПРАВЛЕНИЕ ТОРЦОМ ДОЛОТА СКВАЖИННОГО ИНСТРУМЕНТА С УМЕНЬШЕННЫМ ТРЕНИЕМ БУРИЛЬНОЙ КОЛОННЫ | 2014 |
|
RU2673827C2 |
Изобретение относится к буровой технике и может быть использовано при бурении скважин, а именно наклонно-направленных скважин с протяженным горизонтальным участком, в частности, для разработки труднодоступных запасов углеводородов. Система управления буровым устройством включает корпус, имеющий ось, размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса, исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса. Система дополнительно снабжена центратором, жестко соединенным с корпусом, размещенными в корпусе электронным модулем с электрической цепью и вращающимся контактным устройством, соединенным с электронным модулем через электрическую цепь. Вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами. Шарниры работают в масляной ванне. Ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса. Исполнительный орган содержит три клина и три индуктивных датчика перемещения, механизм перемещения исполнительного органа выполнен в виде трех электрических двигателей с планетарными редукторами, расположенных под углом 120 градусов относительно друг друга. Каждому электрическому двигателю соответствует клин, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса. На каждом клине установлен индуктивный датчик перемещения. Обеспечивается повышение надежности системы управления буровым устройством, повышение точности позиционирования долота для проведения скважины по заданной траектории. 4 ил.
Система управления буровым устройством, включающая корпус, имеющий ось, размещенный в корпусе с возможностью вращения вал, состоящий из ведущего и ведомого валов, соединенных с помощью шарнира, на ведомом валу установлен радиально-упорный подшипник с возможностью поддержания его коллинеарным с осью корпуса, исполнительный орган и механизм перемещения, установленные с возможностью обеспечения отклонения вала от оси корпуса, отличающаяся тем, что она дополнительно снабжена центратором, жестко соединенным с корпусом, размещенными в корпусе электронным модулем с электрической цепью и вращающимся контактным устройством, соединенным с электронным модулем через электрическую цепь, при этом вал снабжен вторым шарниром, образуя промежуточный вал между ведущим и ведомым валами, причем использованы шарниры, работающие в масляной ванне, ведомый вал снабжен вторым радиально-упорным подшипником, установленным вблизи торца корпуса, исполнительный орган содержит три клина и три индуктивных датчика перемещения, механизм перемещения исполнительного органа выполнен в виде трех электрических двигателей с планетарными редукторами, расположенных под углом 120 градусов относительно друг друга, при этом каждому электрическому двигателю соответствует клин, установленный с возможностью перемещения в обе стороны с обеспечением отклонения вала от оси корпуса, и на каждом клине установлен индуктивный датчик перемещения.
| СИСТЕМА НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2603148C2 |
| ШАРНИРНЫЙ ОТКЛОНИТЕЛЬ | 2000 |
|
RU2179226C2 |
| US 5875859 A1, 02.03.1999 | |||
| US 6216802 B1, 17.04.2001 | |||
| US 6659201 B2, 09.12.2003. | |||

