Изобретение относится к информационно-измерительной технике, в частности к имитационному моделированию, и предназначено для создания имитационных моделей беспилотных летательных аппаратов (БПЛА).
Из уровня техники известен способ оценивания параметров запуска объектов управления (описание к патенту РФ №2600964, дата приоритета 01.07.2015, МПК F41F 3/04, G06F 9/00) на основе имитационного статистического моделирования с помощью средств вычислительной техники, при котором определяют маршрут полета объектов управления с учетом параметров обстановки и решения оператора, формулируют функциональные задачи вычислительной системы, задают параметры решения, задают параметры объекта исследования и параметры обстановки, моделируют выход объекта управления в точку привязки к объекту исследования, распределяют объекты исследования, рассчитывают показатели эффективности запуска объектов управления, обеспечивающие вероятность досягаемости цели и учитывающие количество назначенных объектов исследования, средств противодействия противника, набора параметров целераспределения, задания различных признаков налета, сопряженными с функциональными задачами корабельной системы управления запуском объектов управления, а также обеспечивают подготовку данных для автоматического определения оценки оператора за принятое решение.
Из уровня техники известен также способ имитационного статистического моделирования радиоэлектронного вооружения надводных кораблей (RU, патент №2399096, дата приоритета 23.10.2009, МПК G09B 9/00), выбранный в качестве прототипа, при котором используют различные сценарии внешней обстановки, формирующейся вокруг корабля, моделируют функционирование элементов и средств системы радиоэлектронного вооружения надводного корабля, условия функционирования которых имитируются с помощью модели окружающей корабль внешней обстановки, включающей моделирование объектов воздушной, надводной, подводной обстановки, радиочастотных и гидроакустических информационных полей с применением технологий учета полных групп ошибок, допусков и разброса параметров имитируемых объектов и процессов в соответствии с реальными условиями проведения испытаний эффективности и надежности работы системы управления надводного корабля в различных условиях его функционирования, при этом результаты функционирования исполнительных средств - устройств и систем с номерами К=1, …, М описываются в виде вектора состояния этих средств S(t)=(S1(t), …, SM(t)), где Skj(t)=fkj (t, В, A, F, W, Пkj, Уk), где Пkj - потенциал воздействия k-го исполнительного средства на j-й объект внешней обстановки, Уk - накопленный к моменту времени t ущерб для k-го исполнительного средства в результате воздействия на него со стороны условий и объектов внешней обстановки, B - состояние морской поверхности, A - состояние воздушной среды, F - частотные характеристики радиочастотных и гидроакустических полей, W - мощностные характеристики радиочастотных и гидроакустических полей. Указанный способ имитационного статистического моделирования радиоэлектронного вооружения надводных кораблей позволяет осуществлять ввод данных, сериализацию, десериализацию, создавать имитационные модели, обрабатывать результаты и осуществлять хранение данных и результатов.
К недостаткам прототипа следует отнести то, что реализация описанного в нем способа позволяет обеспечивать исследование только морского носителя БПЛА в качестве центрального объекта при меняющихся параметрах внешней обстановки. При этом отсутствует возможность исследования функционирования для различных вариантов сценариев, при которых любой объект или группа объектов могут выступать как в качестве исследуемых, так и входить в состав внешней обстановки.
Технической проблемой заявляемого изобретения является разработка способа автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов (далее - БПЛА), позволяющего осуществлять автоматизированное конфигурирование имитационных моделей для различных типов и количества БПЛА, различных параметров окружающей среды, различных типов и количества целей и носителей БПЛА.
Техническая проблема решается за счет того, что заявляемый способ автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов состоит в том, что осуществляют актуализацию имитационной модели за счет введения исполнителем исходных данных, преобразования исходных данных в документы в формате схемы данных, преобразования документов в структуру данных в формате имитационной модели, последовательного обращения к структурам данных в формате имитационной модели, обработки полученных результатов, сохранения данных и результатов, а также изменения данных в соответствии с заданной логикой, при этом до актуализации имитационной модели проводят подготовительный этап, который заключается в том, что в схеме данных задают описание всех подлежащих конфигурированию элементов имитационной модели, преобразуют описание элементов схемы данных в исходный код на языке программирования высокого уровня, осуществляют централизованное хранение исходного кода на языке программирования высокого уровня и транслирование исходного кода из языка высокого уровня в машинный код.
Технический результат заявляемого способа автоматизированного конфигурирования имитационных моделей БПЛА, заключающийся в возможности осуществления автоматизированного конфигурирования имитационных моделей для различных типов БПЛА, различных параметров окружающей среды, различных типов целей и носителей БПЛА, обеспечивается за счет проведения подготовительного этапа инициализации, во время которого формируют условия для автоматизированного конфигурирования имитационных моделей в дальнейшем, которое возможно осуществлять как на единичном автоматизированном рабочем месте, так и на удаленных взаимосвязанных автоматизированных рабочих местах.
Из уровня техники известна модель оценивания параметров запуска объектов управления (RU, патент №2600964, дата приоритета 01.07.2015, МПК F41F 3/04,G06F9/00), построенная по принципам имитационного статистического моделирования с помощью средств вычислительной техники, обеспечивающая расчет маршрута полета объектов управления (ОУ) с учетом параметров обстановки и решения оператора, модель содержит блок функциональных задач вычислительной системы (ВС), блок задания/приема параметров решения, блок задания/приема параметров объекта исследования (ОИ) и параметров обстановки, в состав блока функциональных задач ВС входит блок моделирования выхода ОУ в точку привязки к ОИ, блок распределения ОИ, блок расчета показателей эффективности запуска объектов управления (ОУ), обеспечивающие расчет вероятности досягаемости цели и учитывающие количество назначенных ОИ, средств противодействия противника, набора параметров целераспределения, задания различных признаков налета, сопряженными с функциональными задачами корабельной системы управления запуском объектов управления, а также обеспечивают подготовку данных для автоматического определения оценки оператора за принятое решение.
Из уровня техники известна также система имитационного статистического моделирования радиоэлектронного вооружения надводных кораблей (описание к патенту на изобретение РФ №2399096, дата приоритета 23.10.2009, МПК G09B 9/00), выбранная в качестве прототипа, которая содержит модуль ввода данных, модуль сериализации-десериализации, модуль имитационной модели, модуль обработки результатов и модуль хранения данных и результатов.
К недостаткам вышеуказанного прототипа относится то, что применение описанной в нем системы имитационного статистического моделирования позволяет обеспечивать исследование центрального объекта одного типа, в частности, носителя БПЛА, при меняющихся параметрах внешней обстановки. При этом отсутствует возможность ее применения для различных вариантов сценариев, при которых любой объект может выступать как в качестве исследуемого, так и входить в состав внешней обстановки.
Технической проблемой заявляемого изобретения является разработка системы автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов (далее - БПЛА), позволяющего осуществлять автоматизированное конфигурирование имитационных моделей для различных типов БПЛА, различных параметров окружающей среды, различных типов целей и носителей БПЛА.
Техническая проблема решается за счет того, что заявляемая система автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов для реализации способа автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов содержит исполнительный блок, включающий в себя модуль ввода данных, модуль хранения, модуль сериализации-десериализации, модуль имитационной модели и модуль обработки результатов, а также блок инициализации, состоящий из модуля схемы данных, модуля генератора кода, модуля программного кода и компилятора, при этом выход модуля схемы данных связан со входом модуля генератора кода, выход модуля генератора кода связан со входом модуля программного кода, выход модуля программного кода связан со входом компилятора, первый выход компилятора связан с первым входом модуля ввода данных, второй выход компилятора связан с первым входом модуля сериализации-десериализации, третий выход компилятора связан с первым входом модуля имитационной модели, выход модуля ввода данных связан с первым входом модуля хранения, первый выход модуля сериализации-десериализации связан со вторым входом модуля хранения, второй выход модуля сериализации-десериализации связан со вторым входом модуля имитационной модели, выход модуля имитационной модели связан с третьим входом модуля сериализации-десериализации, первый выход модуля хранения связан со вторым входом модуля ввода данных, второй выход модуля хранения связан со вторым входом модуля сериализации-десериализации, третий выход модуля хранения связан со входом модуля обработки результатов, выход модуля обработки результатов связан с третьим входом модуля хранения.
Технический результат заявляемой системы автоматизированного конфигурирования имитационных моделей БПЛА для реализации способа автоматизированного конфигурирования имитационных моделей БПЛА, заключающийся в возможности осуществления автоматизированного конфигурирования имитационных моделей для различных типов БПЛА, различных параметров окружающей среды, различных типов целей и носителей БПЛА, обеспечивается за счет наличия в системе блока инициализации, включающего модуль схемы данных, модуль генератора кода, модуль программного кода и компилятор, что позволяет на первоначальном этапе сформировать условия для автоматизированной работы всей системы.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема системы автоматизированного конфигурирования имитационных моделей БПЛА для реализации способа автоматизированного конфигурирования имитационных моделей БПЛА.
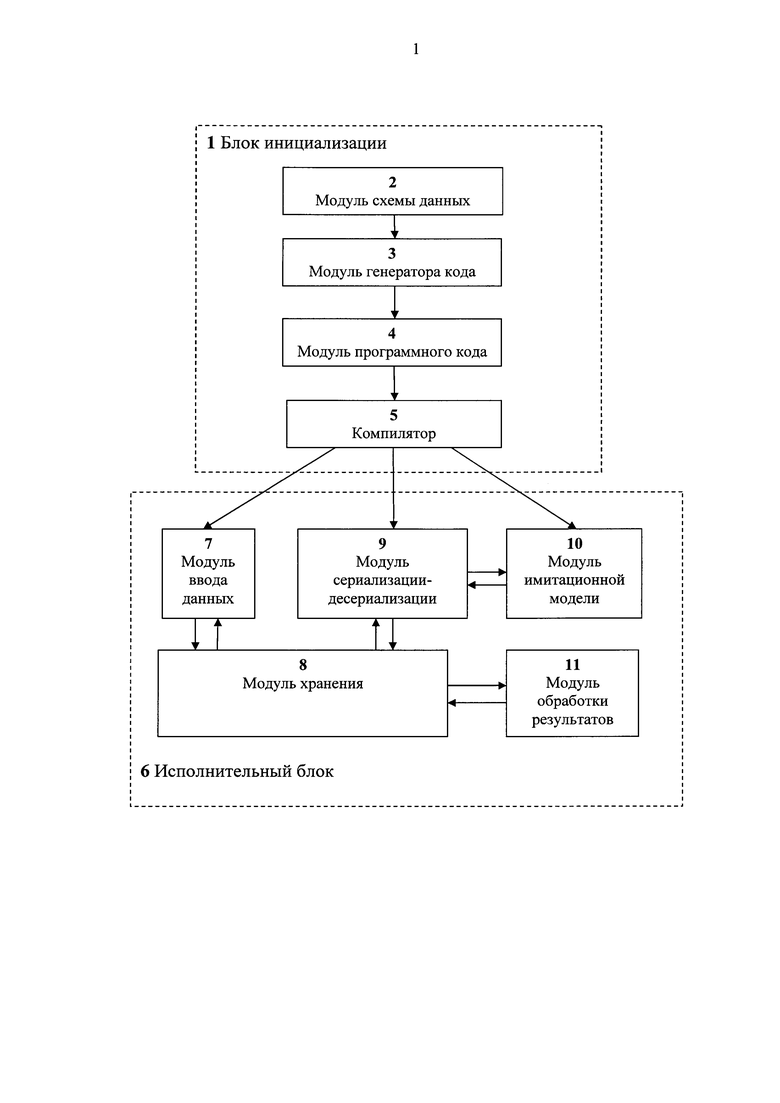
Способ автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов (БПЛА) состоит в том, что первоначально на подготовительном этапе инициализации осуществляют формирование условий для автоматизированного конфигурирования имитационных моделей БПЛА, за счет блока инициализации (1), которое заключается в том, что в модуле схемы данных (2) задают описание всех подлежащих конфигурированию элементов имитационной модели, в модуле генератора кода (3) преобразуют описание элементов схемы данных в исходный код на языке программирования высокого уровня, в модуле программного кода (4) осуществляют централизованное хранение исходного кода на языке программирования высокого уровня, осуществляют транслирование исходного кода из языка высокого уровня в машинный код за счет компилятора (5). После завершения подготовительного этапа инициализации осуществляют непосредственную актуализацию исполнительного блока (6) путем введения оператором исходных данных в модуль ввода данных (7), преобразования исходных данных в документы в формате схемы данных и преобразования документов в структуру данных в формате имитационной модели, которые осуществляются в модуле сериализации-десериализации (9), последовательного обращения в модуле имитационной модели (10) к структурам данных в формате имитационной модели, обработки полученных результатов в модуле обработки результатов (11), а также сохранения данных и результатов в модуле хранения (8).
Система автоматизированного конфигурирования имитационных моделей БПЛА, предназначенная для реализации способа автоматизированного конфигурирования имитационных моделей БПЛА, пример конкретного исполнения которой представлен на блок-схеме, изображенной на чертеже, содержит блок инициализации (1), состоящий из модуля схемы данных (2), модуля генератора кода (3), модуля программного кода (4) и компилятора (5), а также исполнительный блок (6), включающий в себя модуль ввода данных (7), модуль хранения (8), модуль сериализации-десериализации (9), модуль имитационной модели (10) и модуль обработки результатов (11). При этом в системе автоматизированного конфигурирования имитационных моделей БПЛА выход модуля схемы данных (2) связан со входом модуля генератора кода (3), выход модуля генератора кода (3) связан со входом модуля программного кода (4), выход модуля программного кода (4) связан со входом компилятора (5), первый выход компилятора (5) связан с первым входом модуля ввода данных (7), второй выход компилятора (5) связан с первым входом модуля сериализации-десериализации (9), третий выход компилятора (5) связан с первым входом модуля имитационной модели (10), выход модуля ввода данных (7) связан с первым входом модуля хранения (8), первый выход модуля сериализации-десериализации (9) связан со вторым входом модуля хранения (8), второй выход модуля сериализации-десериализации (9) связан со вторым входом модуля имитационной модели (10), выход модуля имитационной модели (10) связан с третьим входом модуля сериализации-десериализации (9), первый выход модуля хранения (8) связан со вторым входом модуля ввода данных (7), второй выход модуля хранения (8) связан со вторым входом модуля сериализации-десериализации (9), третий выход модуля хранения (8) связан со входом модуля обработки результатов (11), выход модуля обработки результатов (11) связан с третьим входом модуля хранения (8).
Блок инициализации (1) может быть размещен на автоматизированном рабочем месте (далее - АРМ) оператора.
Модуль схемы данных (2) содержит описание всех подлежащих конфигурированию элементов имитационной модели-файлы XSD, реализован в форме документа на языке описания XML-Schema.
Модуль генератора кода (3) представляет собой программу, преобразующую описание элементов модуля схемы данных (2) из языка описания XML-Schema в исходный код на языке программирования высокого уровня, например С++.
Модуль программного кода (4) представляет собой последовательность команд и осуществляет централизованное хранение программного кода для модуля ввода данных (7), модуля сериализации-десериализации (9), а также для модуля имитационной модели (10). Содержит описание логики функционирования модулей (7), (9), (10) в виде исходного кода на языке программирования высокого уровня, например С++.
Компилятор (5) представляет собой программу и транслирует исходный код из языка высокого уровня, например С++, в машинный код.
Все модули (2-5), входящие в состав блока инициализации (1), могут быть размещены на запоминающем устройстве АРМа, например, на жестком диске.
Исполнительный блок (6) обеспечивает взаимодействие входящих в его состав модулей (7-11) и может быть размещен либо на одном, либо на нескольких независмых АРМах. АРМ для размещения исполнительного блока (6) может как совпадать с АРМом для размещения блока инициализации (1), так и не совпадать.
Модуль ввода данных (7) может быть реализован, например, в виде графического интерфейса и преобразует полученные от общения с пользователем исходные данные, например, графический интерфейс, в последовательность битов.
Модуль хранения (8) осуществляет хранение данных и может быть выполнен, например, в виде жесткого диска или в виде сервера.
Модуль сериализации-десериализации (9) преобразует последовательность битов в XML-документ в формате модуля схемы данных (2), а также преобразует XML-документы в структуры данных в формате модуля имитационной модели (10). Модуль сериализации-десериализации (9) расположен в оперативной памяти компьютера АРМа исполнительного блока (6).
Модуль имитационной модели (10) осуществляет последовательное обращение к структурам данных в формате имитационной модели и изменение данных в соответствии с заданной логикой функционирования в блоке инициализации (1). Модуль имитационной модели (10) представляет собой программу на жестком диске АРМа в исполнительном блоке (6).
Модуль обработки результатов (11) представляет собой программу, записанную, например, на жестком диске, и может быть представлена в виде системы визуализации, например системы 3D визуализации.
Система автоматизированного конфигурирования имитационных моделей БПЛА работает следующим образом.
Первоначально на подготовительном этапе осуществляют формирование исполнительного блока (6) за счет блока инициализации (1), которое заключается в том, что в модуле схемы данных (2) задают описание всех подлежащих конфигурированию элементов имитационной модели, в модуле генератора кода (3) преобразуют описание элементов схемы данных в исходный код на языке программирования высокого уровня, в модуле программного кода (4) осуществляют централизованное хранение исходного кода на языке программирования высокого уровня, осуществляют транслирование исходного кода из языка высокого уровня в машинный код за счет компилятора (5). После завершения формирования исполнительного блока (6) осуществляют непосредственную актуализацию исполнительного блока (6) путем введения оператором исходных данных в модуль ввода данных (7), преобразования исходных данных в документы в формате схемы данных и преобразования документов в структуру данных в формате имитационной модели, которые осуществляются в модуле сериализации-десериализации (9), последовательного обращения в модуле имитационной модели (10) к структурам данных в формате имитационной модели, обработки полученных результатов в модуле обработки результатов (11), а также сохранения данных и результатов в модуле хранения (8).
Все составляющие модули системы автоматизированного конфигурирования имитационных моделей БПЛА могут быть изготовлены с использованием существующей элементной базы, применение настоящего изобретения позволяет осуществлять автоматизированное конфигурирование имитационных моделей для различных типов БПЛА, различных параметров окружающей среды, различных типов целей и носителей БПЛА, как на единичном автоматизированном рабочем месте, так и на удаленных взаимосвязанных автоматизированных рабочих местах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СРЕДСТВА СОПРЯЖЕНИЯ ТИПОВ | 2004 |
|
RU2364918C2 |
| ИСПОЛЬЗОВАНИЕ АБСТРАКТНЫХ ОПИСАНИЙ ДЛЯ ГЕНЕРАЦИИ, ОБМЕНА И КОНФИГУРИРОВАНИЯ РАБОЧИХ ЦИКЛОВ СЕРВИСА И КЛИЕНТА | 2005 |
|
RU2405202C2 |
| СПОСОБ ИСПЫТАНИЯ МОДЕЛИ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2813741C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ СТРУКТУРЫ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2423286C1 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
| СПОСОБ УНИФИКАЦИИ ДАННЫХ ПРИ ВЗАИМОДЕЙСТВИИ НАЗЕМНОЙ СТАНЦИИ УПРАВЛЕНИЯ С РОБОТИЗИРОВАННЫМИ КОМПЛЕКСАМИ | 2021 |
|
RU2780080C1 |
| ИНТЕРФЕЙС ПРОГРАММИРОВАНИЯ ДЛЯ КОМПЬЮТЕРНОЙ ПЛАТФОРМЫ | 2004 |
|
RU2371758C2 |
| Специализированный программно-аппаратный комплекс автоматизированного проектирования радиолокационных станций, комплексов и систем, а также их компонентов (СПАК) | 2021 |
|
RU2778139C1 |
| Способ автоматизации калибровки датчиков бесплатформенной инерциальной системы роботизированного беспилотного летательного аппарата | 2020 |
|
RU2751143C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
Группа изобретений относится к способу и системе для автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов (БПЛА). Для осуществления способа предварительно задают описание всех подлежащих конфигурированию элементов имитационной модели и преобразуют их на языке программирования высокого уровня, осуществляют хранение исходного кода и его транслирование в машинный код. Осуществляют актуализацию имитационной модели за счет введения оператором исходных данных, преобразования их в документы в формате схемы данных, преобразования документов в структуру данных в формате имитационной модели, последовательного обращения к структурам данных, обработки полученных результатов и их сохранения. Система содержит исполнительный блок и блок инициализации. Исполнительный блок содержит модуль ввода данных, модуль сериализации-десериализации, модуль имитационной модели, модуль хранения, модуль обработки результатов. Блок инициализации содержит модуль схемы данных, модуль генератора кода, модуль программного кода, компилятор. Обеспечивается автоматизированное конфигурирование имитационных моделей БПЛА различных типов, различных параметров окружающей среды и типов носителей БПЛА. 2 н.п. ф-лы, 1 ил. 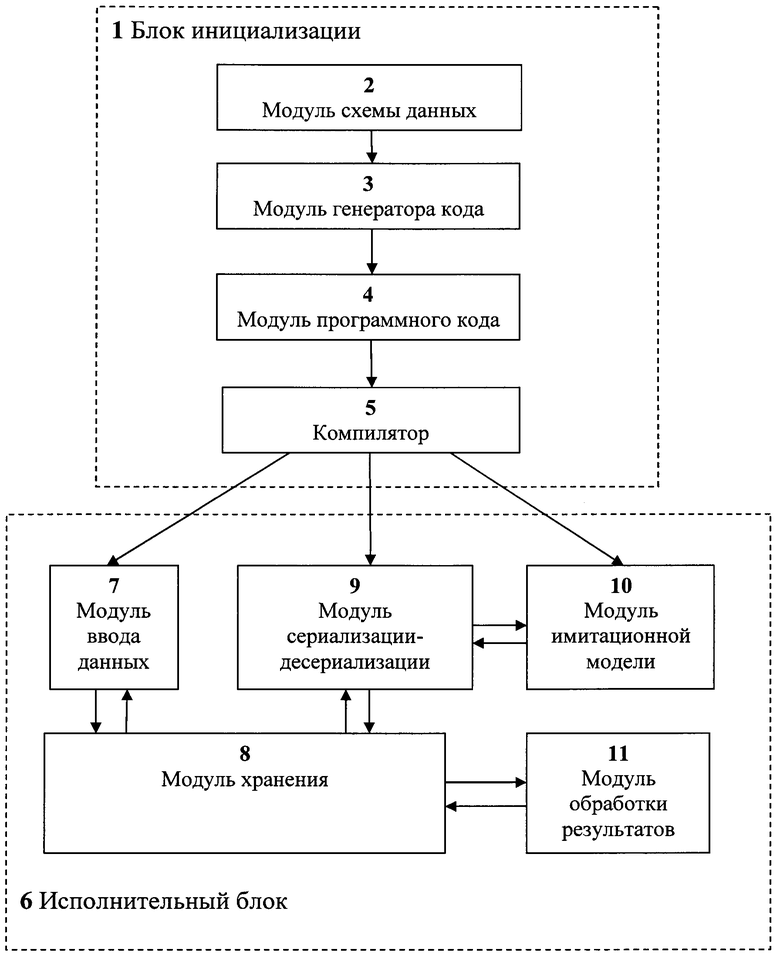
1. Способ автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов (БПЛА) состоящий в том, что осуществляют актуализацию имитационной модели за счет введения оператором исходных данных, преобразования исходных данных в документы в формате схемы данных, преобразования документов в структуру данных в формате имитационной модели, последовательного обращения к структурам данных в формате имитационной модели, обработки полученных результатов, сохранения данных и результатов, отличающийся тем, что до актуализации автоматизированного конфигурирования осуществляют подготовительный этап инициализации, заключающийся в том, что в схеме данных задают описание всех подлежащих конфигурированию элементов имитационной модели, преобразуют описание элементов схемы данных в исходный код на языке программирования высокого уровня, осуществляют централизованное хранение исходного кода на языке программирования высокого уровня и транслирование исходного кода из языка высокого уровня в машинный код.
2. Система автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов для реализации способа по п. 1, содержащая исполнительный блок, включающий в себя модуль ввода данных, модуль хранения, модуль сериализации-десериализации, модуль имитационной модели и модуль обработки результатов, отличающаяся тем, что система снабжена блоком инициализации, состоящим из модуля схемы данных, модуля генератора кода, модуля программного кода и компилятора, при этом выход модуля схемы данных связан со входом модуля генератора кода, выход модуля генератора кода связан со входом модуля программного кода, выход модуля программного кода связан со входом компилятора, первый выход компилятора связан с первым входом модуля ввода данных, второй выход компилятора связан с первым входом модуля сериализации-десериализации, третий выход компилятора связан с первым входом модуля имитационной модели, выход модуля ввода данных связан с первым входом модуля хранения, первый выход модуля сериализации-десериализации связан со вторым входом модуля хранения, второй выход модуля сериализации-десериализации связан со вторым входом модуля имитационной модели, выход модуля имитационной модели связан с третьим входом модуля сериализации-десериализации, первый выход модуля хранения связан со вторым входом модуля ввода данных, второй выход модуля хранения связан со вторым входом модуля сериализации-десериализации, третий выход модуля хранения связан со входом модуля обработки результатов, выход модуля обработки результатов связан с третьим входом модуля хранения.
| СПОСОБ ИМИТАЦИОННОГО СТАТИСТИЧЕСКОГО МОДЕЛИРОВАНИЯ РАДИОЭЛЕКТРОННОГО ВООРУЖЕНИЯ НАДВОДНЫХ КОРАБЛЕЙ | 2009 |
|
RU2399096C1 |
| UA 40294 U, 25.03.2009 | |||
| АВИАЦИОННЫЕ СИСТЕМЫ ФГУП ГОСНИИАС, 50, октябрь 2014 | |||
| Система визуализации VRSG фирмы MetaVR для тренажеров БЛА, с.4 | |||
| JP 3188566 B2, 16.07.2001. | |||

