Предлагаемое изобретение относится к области автоматизации управления процессом проектирования законов управления и структуры систем управления движением судов и кораблей с использованием вычислительных средств, в частности к разделу автоматизации исследований и проектирования систем автоматического управления движением (САУД) корабля с применением компьютерного моделирования
Известны способы построения аппаратно-программных комплексов, так называемых SCADA систем, для исследования динамики движения судна (Прохоренков А.М. и др. Разработка исследовательских комплексов судовых систем управления // Труды XXXIV Всероссийской конференции "Управление движением морскими судами и специальными аппаратами", изд. ИЛУ РАН, М., 2007 г., с.148-156).
Известен также способ автоматизированного проектирования структуры систем управления техническими системами [Патент Р.Ф. №2331097]. «Способ состоит в следующем: формируют на пульте управления команду на начало проектирования системы управления (СУ) и передают ее на узел формирования структуры СУ, формируют задачи управлениями структуры СУ, оптимизируют элементы состава и структуру СУ по заданному критерию. Затем исследуют режимы функционирования СУ. При несоответствии заданию корректируют структуру СУ и повторяют процесс проектирования…» (Близким к рассмотренному способу проектирования СУ является способ проектирования с использованием ЦВМ, приведенный в патенте Р.Ф. №2294560). Рассмотренные способы проектирования СУ обладают недостаточными функциональными возможностями для исследования и проектирования структуры и законов САУД. Автоматизация формирования моделей проектирования для ввода их в ЦВМ отсутствует.
Рассмотрим способ автоматизации проектирования структуры и законов САУД судна «DLogic», который разработан в ЦНИИ «Аврора» и используется в системе автоматизации проектирования САУД судна. Данный способ принят нами в качестве прототипа. [Корчанов В.М. и др.: "Разработка системы управления движением судна с системой DLogic. // Труды XXXIV Всероссийской конференции "Управление движением морскими судами и специальными аппаратами", изд. ИЛУ РАН, М., 2007 г., стр.86-102
Способ DLgic использует два модуля:
- первый - модуль моделирования САУД для разработки и исследования динамических процессов движения судна, который включает блоки: модели динамики движения судна, модели исполнительных средств, модели управляющих и возмущающих воздействий,
- второй - модуль специализированного программного проектирования для автоматизированной разработки структуры САУД и оптимальных законов управления.
С использованием графического построения исследуемых динамических процессов движения судна разработчик формирует блоки:
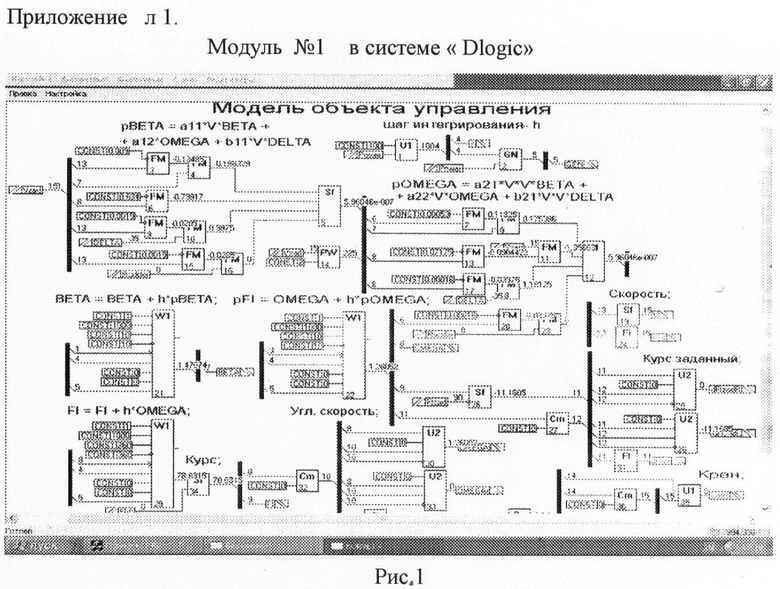
- модель динамики движения судна (см. приложение рис. 1);
- модель исполнительных средств (см. приложение рис. 2);
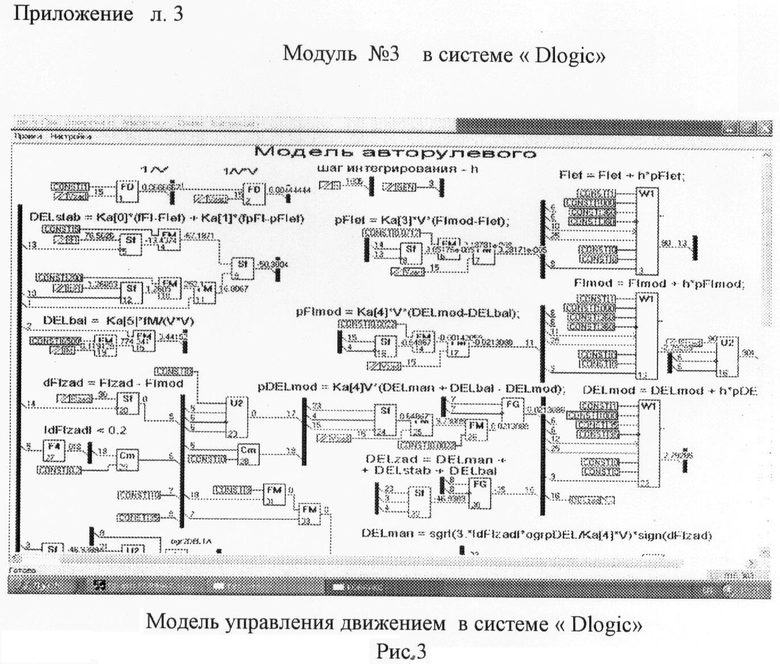
- модель автоматического управления движением корабля (см. приложение рис 3).
Рассмотренные блоки связываются через общие шины и формируют подсистему специализированного программного проектирования для автоматизированного расчета оптимальных законов управления САУД, которую совместно со вторым модулем вводят в ЦВМ. Сформированная структура и параметры законов проектируемой САУД записываются в виде таблиц и графиков для использования в проекте.
Способ автоматизации проектирования САУД судна «DLogic» позволяет получить параметры САУД (в том числе законы управления движением судна в разных условиях эксплуатации), если заданы динамические характеристики движения судна в окружающей среде и технологические параметры используемых модулей САУД.
Способ формирования блоков моделей приведен в приложении на рис.1, 2, 3. Из рассмотрения рисунков можно сделать следующие выводы:
- способ формирования программ моделей, используемых при автоматизированном проектировании САУД с помощью ЦВМ, требует от исследователя высокой квалификации в области программирования;
- перестройка стенда на новый объект исследования с использованием рассматриваемого способа формирования моделей, требует больших временных и интеллектуальных затрат;
- в систему автоматизированного проектирования САУД сложно ввести режим интерактивного управления.
В предложенном нами способе автоматизированного проектирования структуры и законов системы управления движением корабля отмеченные выше недостатки, присущие рассмотренным выше аналогам и прототипу, реализуемым с использованием компьютера, устранены. При формировании предложенного способа дополнительно используются модули автоматической компиляции с блоком расчета динамических систем (РДС), что позволяет:
- автоматически компилировать (преобразовывать) в модулях-моделях фрагменты простых (созданных инженером-разработчиком САУД с учетом только функциональных особенностей исследуемых процессов) программ моделей в более сложные программы на языке C++ для непосредственного исполнения в компьютере;
- автономно перестраивать модель любого блока, не нарушая работоспособности всей автоматизированной системы;
- при перестройке структурной схемы автоматически перестраивать связи между моделями для сохранения работоспособности всей системы после перенастройки модулей-моделей.
Цель предлагаемого способа - автоматически компилировать (преобразовывать) в модулях-моделях фрагменты простых моделей в более сложные на языке программирования C++ для непосредственного исполнения в компьютере.
Рассмотрим, как формируется предложенный способ автоматизированного проектирования структуры и законов системы управления движением корабля.
В способе, как и в прототипе, используются модуль параметрической оптимизации параметров законов управления движением корабля, компилятор и модели: динамики движения корабля, исполнительных средств, системы управления движением. Модели задаются в форме разностных уравнений с соответствующими логическими операциями для описания динамики и статики корабля, исполнительных средств и системы управления движением.
Для переформирования моделей в исполняемые программные библиотеки, которые используются непосредственно в компьютере, производят автоматическую компиляцию моделей;
- динамики движения корабля;
- исполнительных средств;
- системы управления движением.
С этой целью в способе дополнительно используют следующие модули: генератор программ, блок РДС и редактор моделей. В редактор моделей вводят модели: динамики движения корабля, исполнительных средств и системы управления движением, где они преобразуются в электронные модели. Из редактора моделей электронные модели вводят в генератор программ, который переформирует электронные модели на язык программирования C++ и вводит в компилятор, в котором формируются исполняемые программные библиотеки. С выхода компилятора исполняемые программные библиотеки вводятся через блок РДС на вход модуля параметрической оптимизации, в котором, во взаимодействии с РДС, формируется структура и законы системы управления движением проектируемого корабля, отвечающая выбранному критерию.
Блок автоматической компиляции строит полный исходный текст программы со всеми необходимыми описаниями по отдельным фрагментам, созданным разработчиком САУД с учетом только функциональных особенностей исследуемых процессов. Затем блок вызывает один из внешних штатных компиляторов, который, обработав сформированный текст, создаст программу в динамической библиотеке (DLL).
Блок автоматической компиляции в стенде автоматизированного проектирования структуры и законов системы управления движением корабля:
1. Обеспечивает ввод и редактирование фрагментов исходного текста программы модуля, отвечающих за его поведение и реакцию на события. Как минимум, должен обеспечиваться ввод функции расчета значений выходов модуля при поступлении данных на его входы. Для этого используется модуль редактора модели.
2. Собирает из фрагментов текста, введенных разработчиком, полный исходный текст программы модуля со всеми структурами данных и описаниями, необходимыми для доступа к собственным переменным блока, общим переменным системы и сервисным функциям стенда. Для этого используется модуль генератора программы.
3. Вызывает внешнюю программу типового компилятора, которая преобразует исходный текст программы в исполняемый файл DLL.
4. Взаимодействует с комплексом стенда, отключает на время компиляции модули стенда от исполняемых файлов DLL. Если этого не сделать, файлы будут заблокированы, и компилятор не сможет заменить их новыми. Этим занимается блок РДС.
Рассмотрим работу стенда автоматизированного проектирования структуры и законов системы управления движением, использующего предложенный способ.
На чертеже приведена блок- схема стенда автоматизированного проектирования структуры и законов системы управления движением корабля, которая построена с использованием предложенного способа автоматизированного проектирвания структуры и законов системы управления движением корабля.
Стенд содержит модель динамики движения судна - 1, модель исполнительных средств - 2, модель управления движением - 3, модуль параметрической оптимизации - 4, редактор моделей - 5, генератор программ - 6, компилятор - 7, блок РДС - 8, модуль записи результатов - 9.
В модули стенда вводят модели: динамики движения корабля - 1, исполнительных средств - 2 и системы управления движением - 3 (созданных разработчиком САУД с учетом только функциональных особенностей исследуемых процессов управления движением корабля). Все модели задаются в форме разностных уравнений с соответствующими логическими операциями для описания динамики и статики корабля, исполнительных средств и системы управления движением. Эти модели вводятся в редактор моделей - 5, где они преобразуются в электронные модели, обеспечивая ввод и редактирование фрагментов исходного текста программ моделей, отвечающих за его поведение и реакцию на события. (Как минимум, должен обеспечиваться ввод функции расчета значений выходов модели при поступлении данных на его входы).
Электронные модели из редактора моделей - 5 вводят в генератор программ - 6, который переформирует электронные модели на язык программирования C++, собирая из фрагментов текста, введенных разработчиком, полный исходный текст программы модуля со всеми структурами данных и описаниями, необходимыми для доступа к собственным переменным блока, общим переменным системы и сервисным функциям стенда.
Текст программ из генератора программ вводится в компилятор - 7, в котором формируются программы трех моделей в форме DLL (исполняемые программные библиотеки). С выхода компилятора - 7 исполняемые программные библиотеки вводятся через блок РДС - 8 на вход модуля параметрической оптимизации - 4, в котором в тандеме с блоком РДС модели DLL формируют, как в прототипе, требуемые законы управления САУД. Полученные структуры и законы управления, необходимые для проектирования САУД, вводятся в модуль записи результатов - 9.
Так автоматически формируется структура и законы управления проектируемой САУД, отвечающие выбранному критерию качества на стенде автоматизированного проектирования структуры и законов системы управления движением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЖАТИЯ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2013 |
|
RU2539622C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С ДИАГНОЗОМ СБОЕВ | 2009 |
|
RU2394721C1 |
| Способ автоматизированного проектирования производства и эксплуатации прикладного программного обеспечения и система для его осуществления | 2016 |
|
RU2676405C2 |
| СИСТЕМА И СПОСОБ РАСПРЕДЕЛЕННЫХ ВЫЧИСЛЕНИЙ | 2010 |
|
RU2554509C2 |
| СПОСОБ ОТКАЗОБЕЗОПАСНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2432297C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ДРАЙВЕРАМИ В ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЕ | 2002 |
|
RU2304305C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНФИГУРИРОВАНИЯ ИМИТАЦИОННЫХ МОДЕЛЕЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2656981C1 |
| СРЕДА РАЗРАБОТКИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ДЛЯ "ТОНКОГО" КЛИЕНТА | 2007 |
|
RU2469385C2 |
| СИСТЕМА ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2013 |
|
RU2536011C2 |

Изобретение относится к области автоматизации управления процессом проектирования законов управления и структуры систем управления судов и кораблей с использованием вычислительных средств. Заявленный способ позволяет ускорить процесс проектирования систем автоматического управления движением корабля на специальных стендах. Ускорение и повышение качества автоматизированного проектирования базируются на введении в автоматизированных системах проектирования законов управления движением кораблей автоматической компиляции моделей процесса управления с использованием блока редактирования, в который вводят модели процессов для преобразования в электронные модели, а также блока генератора программ, компилятора и блока расчета динамических систем в которых электронные программы преобразуют в исполняемые программы в формате DLL. Исполняемые программы в формате DLL вводят через блок расчета динамических систем в блок параметрической оптимизации для выработки структуры и законов системы управления движением корабля. 4 ил.
Способ автоматизированного проектирования структуры системы управления движением корабля, использующий модуль параметрической оптимизации, компилятор и модели: динамики движения корабля, исполнительных средств, системы управления движением, которые формируют набором разностных уравнений и логических операций, описывающих динамику движения и статику: корабля, исполнительных средств и системы управления движением, отличающийся тем, что модели динамики движения корабля, исполнительных средств и системы управления движением автоматически компилируют в исполняемые программные библиотеки с использованием дополнительных модулей: генератора программ, блока расчета динамических систем и редактора моделей, в который вводят модели динамики движения корабля, исполнительных средств и системы управления движением, преобразуемые им в электронные модели, из редактора моделей электронные модели направляют в генератор программ, с помощью которого формируют программы моделей на языке программирования C++, которые вводят в компилятор, где формируют исполняемые программные библиотеки, поступающие в блок расчета динамических систем, который соединен с модулем параметрической оптимизации, на выходе модуля параметрической оптимизации формируют структуру и законы системы управления движением корабля, которые направляют в модуль записи результатов.
| КОРЧАНОВ В.М | |||
| и др | |||
| Труды XXXIV Всероссийской конференции «Управление движением морскими судами и специальными аппаратами» | |||
| - М.: ИПУ РАН, 2007, с.86-102 | |||
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ И ПРОГРАММА АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ | 2003 |
|
RU2294560C2 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |
| CN 101373491 A, 25.02.2009. | |||

