Изобретение относится к радиосредствам обмена данными и может быть использовано для защиты операторов, участвующих в высокоскоростном информационном обмене информацией между беспилотными летательными аппаратами (БПЛА) и наземными пунктами управления (НПУ).
Известна система радиосвязи с подвижными объектами (ПО) [1], которая состоит из наземной и бортовой приемопередающих радиостанций, между которыми в соответствии с заложенными алгоритмами осуществляется обмен данными. В этой системе во время движения подвижные воздушные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом. Принимаемые наземной радиостанцией из канала "воздух-земля" сообщения через аппаратуру передачи данных поступают в вычислитель автоматизированного рабочего места (АРМ) на базе ПЭВМ, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с адресами подвижных воздушных объектов, хранящимися в памяти их бортовых вычислителей. При совпадении адреса подвижного воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения подвижных воздушных объектов и состоянии их многочисленных датчиков выводится на один экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения постоянной радиосвязи со всеми N ПО. При выходе за пределы радиогоризонта, хотя бы одного из ПО или приближении к границе зоны устойчивой радиосвязи, определяется программно один из ПО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ПО определяются оптимальные пути доставки сообщений удаленному от НК за радиогоризонт выбранному подвижному воздушному объекту. Сообщение от НК через последовательную цепочку, состоящую из (N-1) подвижных объектов, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ПО, назначенного ретранслятором, и адреса подвижных воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые на ПО сообщения анализируются в блоке анализа типа сообщений. После анализа решается вопрос о направлении данных по двунаправленной шине на систему управления объекта или ретрансляции их на соседний ПО.
В обычном режиме с НК, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ПО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение также отображается на экране монитора АРМ. На ПО после прохождения через бортовые антенну МВ-ДМВ диапазонов, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного воздушного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения, и определяется в каком режиме должна работать аппаратура ПО. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу "воздух-земля" взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ПО и мониторе АРМ НК соответственно. Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
Однако аналогу присущи следующие недостатки, связанны с тем, что на НК отсутствуют сведения о состоянии бортовых систем, не передаются на наземные службы сведения о наблюдаемых объектах и не предусмотрены процедуры обмена данными между НК и ПО при отсутствии экипажа, отсутствует защита экипажа ПО и операторов НК от самонаводящихся на радиоизлучение снарядов.
Известен аналог - система радиосвязи с подвижными объектами по патенту РФ №2518054 [2]. Система состоит из наземного комплекса, содержащего наземную антенну МВ-ДМВ диапазонов, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных (АПД) к соответствующему первому входу/выходу вычислителя АРМ. Первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. Концентратор подключен к локально-вычислительным сетям (ЛВС), которые в свою очередь соединены двухсторонними связями с соответствующими входами/выходами наземной направленной антенны, наземному антенному коммутатору, наземной аппаратуре связи, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ. Каждый из В блоков сопряжения состоит из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, выход которого является входом/выходом системы. Наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи. Наземный блок горизонтирования подключен к наземной направленной антенне механическими связями. В вычислителе АРМ в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами воздушных объектов, хранящимися в памяти вычислителя АРМ. При совпадении адреса воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков, в том числе датчика с высокоскоростной информацией, выводится на экран монитора АРМ НК. В вычислителе АРМ решаются следующие задачи: прием-передача сигналов со второй наземной АПД, прием данных о фактическом положении диаграммы направленности наземной направленной антенны и состоянии наземной аппаратуры связи, формирование хронизирующих сигналов для переключения режимов «передача-прием» антенного коммутатора, сигналов управления: положением диаграммы направленности антенны (ДНА) наземной направленной антенны по азимуту и углу места, наземным блоком горизонтирования, режимами работы ПО, прием, обработка и вывод на экран монитора АРМ сигналов контроля со всех радиоэлектронных узлов системы, сигналов с выхода наземного приемника сигналов навигационных спутниковых систем, прием-передача данных через блок сопряжения по шине потребителям информации; формирование на экране монитора АРМ картинки в соответствии с принятой с ПО информацией и вспомогательной информацией в виде графических линий, символов и других изображений; отображение квитанций и донесений о режимах работы ПО, НК, АРМ, слежение за местоположением всех ПО в зоне радиосвязи; обеспечение постоянной радиосвязи со всеми N ПО, оптимальное управление их движением; решение конфликтных ситуаций и выполнение других операций. Для удобства разрешения оператором НК конфликтной ситуации при наличии помеховой обстановки на экран каждого монитора АРМ НК может выводиться положение каждого ПО относительно НК. Для этого, программно, с помощью вычислителя АРМ выделяются части пространства, в которых помеховая ситуация в вероятностном смысле менее напряженная, и через находящиеся там ПО осуществляется трафик. Для отображения тенденции движения каждого ПО на экране монитора АРМ вычислителем АРМ формируются отметки, характеризующие предыдущее местоположение ПО и экстраполяционные отметки, характеризующие местоположение ПО через заданный интервал времени. По мере движения ПО устаревающие отметки стираются. Точка, характеризующая местоположение НК, обычно размещается в центре экрана монитора АРМ. ПО, находящиеся вблизи зоны устойчивой радиосвязи, выделяются от остальных, например, цветом отметки на экране монитора АРМ, и для них в вычислителях начинается решение задачи выбора оптимального пути трансляции управляющих сообщений от НК на выбранный ПО.
Набираемое оператором (диспетчером) сообщение для ПО и принятые данные отображаются на экране монитора АРМ. Принятые на НК навигационные сообщения от всех ПО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
В состав каждого из N подвижных объектов входят бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Выход бортового вычислителя подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления подвижным воздушным объектом. Бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне МВ-ДМВ диапазонов. Бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования соединены двухсторонними связями с соответствующими входами/выходами бортового вычислителя. Бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями. Передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного воздушного объекта, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке. Бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне. В режимах ретрансляции и обмена данными бортовая направленная антенна 1-го ПО соединена по эфиру с бортовой направленной антенной 2-го ПО и так далее до N-го ПО.
Аналогу присущи недостатки, заключающиеся в том, что отсутствует трансляция данных контроля оборудования ПО и сведения о обнаруженных объектах по маршруту следования на мониторы НК, оборудование функционирует только с экипажем ПО, отсутствует защита экипажа ПО и операторов НК от самонаводящихся на радиоизлучение снарядов.
Известна система радиосвязи с подвижными объектами по патенту РФ №2673680 [3]. Она состоит из НК, содержащего наземную антенну, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к соответствующему первому входу/выходу вычислителя АРМ. Первый вход АРМ подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к первому монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. Концентратор подключен к локально-вычислительным сетям, которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной направленной антенны, наземного антенного коммутатора, наземной аппаратуры связи, каждому из А АРМ. Автоматизированное рабочее место состоит из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ. Каждый из В блоков сопряжения состоит из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи. Вход/выход канала связи является входом/выходом системы. Наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи. Наземный блок горизонтирования подключен к наземной направленной антенне механическими связями. В режимах ретрансляции и обмена данными бортовая направленная антенна 1-го ПО соединена по эфиру с бортовой направленной антенной 2-го ПО и так далее до N-го ПО. В состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Выход бортового вычислителя подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления подвижным объектом. Бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования соединены двухсторонними связями с соответствующими входами/выходами бортового вычислителя. Бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями. Бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне. Бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне. Передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного объекта, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке. Распределитель данных в НК подключен двухсторонними связями к локально-вычислительным сетям. Второй монитор, соединен с соответствующим выходом вычислителя АРМ.
Аналогу присущи недостатки:
- бортовое оборудование ПО рассчитано на обслуживание экипажем, так как в нем имеется блок регистрации данных;
- отсутствует защита экипажа ПО и операторов НК от самонаводящихся на радиоизлучение снарядов;
- для управления бортовой направленной антенной используются громоздкие электромеханические узлы из-за чего затруднена оперативная трансляция на НК данных по каналу СВЧ диапазона при смене позиции НК;
- при потере сигналов управления из-за помех дальнейшая организация обмена данными между НК и ПО невозможна.
Известна система, реализующая способ управления движением летательных аппаратов [4], содержащий этапы, на которых в наземной пункте управления принимают данные, касающиеся местоположения летательных аппаратов, создают карту движения летательных аппаратов в режиме реального времени на основе указанных данных местоположения, оценивают возможность столкновения летательных аппаратов на основе карты. В случае, если такая проверка дает положительный результат, отправляют предупреждение о возможном столкновении на летательные аппараты. При этом обработку сигналов осуществляют посредством сервера реального времени (RTS-сервера), выполненного с возможностью осуществлять связь с навигационными приборами, расположенными на борту летательных аппаратов и оснащенными приложением, выполненным с возможностью передавать данные о положении летательных аппаратов на RTS-сервер и определять идеальный маршрут и идеальную высоту полета в соответствии с правилами визуального полета (VFR) и областями пролета, определенными аэронавигационным картографированием, причем упомянутое приложение взаимодействует с системой управления полетом летательных аппаратов.
Недостатками данного способа и системы его реализующей являются ограниченность функционала, направленного, в основном, на предотвращение столкновений в воздухе, недостаточная скрытность работы и местоположения операторов наземного пункта управления, отсутствие его защиты от осколков мин и самонаводящихся на радиоизлучение снарядов типа SMArt, ALARM [5].
Наиболее близким по назначению и большинству существенных признаков является система, реализующая способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора [6]. Указанная система характеризуется тем, что в состав ее бортового оборудования пилотируемого летательного аппарата вводят сервер-агрегатор, использующий в своей работе технологии искусственного интеллекта (ИИ), применяемые для построения программы применения отдельного БПЛА или группы БПЛА. При этом с каждого БПЛА, входящего в группу, передается по радиоканалу в систему связи пилотируемого летательного аппарата информация об обнаруженных БПЛА, объектах и их характеристиках, а также информация о конфигурации БПЛА и текущем состоянии его систем, которая затем по сетевому каналу через бортовую цифровую вычислительную машину (БЦВМ) поступает в сервер-агрегатор. При этом дополнительно к этой информации от БЦВМ в сервер-агрегатор передается информация о местоположении, высотно-скоростных параметрах обнаруженных объектов, о радиолокационной и метеорологической обстановке и характеристиках радиоконтрастных объектов, о текущей обстановке в оптическом и инфракрасном диапазоне, а также информация о полетном задании и цифровая карта местности с объектным составом. По видеоканалу через блок преобразования телевизионных сигналов в сервер-агрегатор поступает теле-видеоинформация от группы БПЛА, в том числе радиолокационное изображение и изображение в оптическом и/или инфракрасном диапазонах. Затем после комплексной обработки поступившей информации в сервере-агрегаторе синтезируется единое тактическо-информационное поле и программы применения группы БПЛА или отдельных БПЛА, которые поступают для подтверждения на индикатор летчику-оператору и после его одобрения передаются по сетевому каналу информационного взаимодействия в систему связи для дальнейшей передачи по радиоканалу в каждый БПЛА группы. В случае несогласия летчика-оператора с предложенными программами применения БПЛА ему предоставляется возможность вручную через органы управления индикатора задавать параметры применения для любого БПЛА группы или группы БПЛА в целом. В сервере-агрегаторе используется информация, получаемая по радиоканалу системой связи, в том числе от наземного пункта управления.
Прототипу присущи недостатки:
- в системе отсутствует защита воздушного пункта летчика-оператора от самонаводящихся на радиоизлучение снарядов (СНС), при попадании которых в пилотируемый летательный аппарат погибнет экипаж и разрушится технология управления группой БПЛА;
- существуют трудности реализации одновременного слежения с пилотируемого летательного аппарата за быстро перемещающимися в пространстве несколькими БПЛА;
- в пилотируемом летательном аппарате имеется бронекапсула для экипажа, обитаемый отсек, устройства для обеспечения жизнедеятельности экипажа, управления полетом самолета и другая аппаратура, что значительно увеличивает его массу (снижает маневренность и время полета), увеличивает эффективную площадь поверхности рассеивания, что повышает вероятность его обнаружения, а, следовательно, и вероятность поражения средствами ПВО;
- по объему оборудования системы и выполняемым функциям пилотируемый летательный аппарат напоминает оборудование самолета радиолокационной разведки и наведения А-50 или А-100, для предполетной подготовки и ввода в действие которого требуются часы и согласованная работа личного состава в двух разнесенных районах: у линии соприкосновения войск и аэродроме приписки пилотируемого летательного аппарата;
- при размещении оператора на НПУ, также нет защиты от поражения СНС и осколками мин после обнаружения его местоположения с помощью средств радиотехнической разведки и выдачи точных координат на батареи противника; воспользоваться укрытием оператору НПУ нельзя, так как в укрытии из-за влияния поверхности Земли резко снижается энергетический потенциал высокоскоростной линии радиосвязи и, следовательно, ухудшаются помехозащищенность и качество управления БПЛА.
Технический результат реализации предлагаемой системы связи состоит в повышении защищенности оператора наземного пункта управления от осколков мин и самонаводящихся на радиоизлучение снарядов и расширении функциональных возможностей безопасного управления группой беспилотных летательных аппаратов, а именно, повышение качества защищенного управления с НПУ и автоматической передачи с групповых БПЛА широкополосной информации и обработка ее как на групповых БПЛА, ведущем и резервном БПЛА, так и на рабочем месте оператора НПУ, удаление излучающих средств связи от местоположения оператора НПУ.
Технический результат достигается тем, что в систему радиосвязи с беспилотными летательными аппаратами, содержащую наземный пункт управления с системой связи, N групп беспилотных летательных аппаратов, при этом каждый БПЛА содержит бортовую цифровую вычислительную машину, соединенную двухсторонними связями с оптической системой, пилотажно-навигационным оборудованием (ПНО), системой радиотехнической разведки, сервером-агрегатором, блоком преобразования телевизионных сигналов, который в свою очередь соединен двухсторонними связями с сервером-агрегатором и ПНО, в качестве управляющих летательных аппаратов дополнительно введены связанные между собой по радиоэфиру ведущий и резервный БПЛА, причем бортовой комплекс каждого из них содержит те же блоки, что и БПЛА из состава N групп, и дополнительно содержит модуль хранения и обновления программ искусственного интеллекта, соединенный двухсторонними связями с БЦВМ, бортовую часть системы связи, состоящую из последовательно соединенных двухсторонними связями модуля связи с БПЛА, преобразователя форматов данных и модуля связи с НПУ, каждый из которых соединен двухсторонними связями с БЦВМ, также содержит бортовой аккумулятор, подключенный ко всем узлам бортового комплекса, при этом преобразователь форматов данных подключен двухсторонней связью к блоку преобразования телевизионных сигналов, а БЦВМ имеет вход/выход для загрузки данных и внешнего контроля, модуль связи с БПЛА по радиоэфиру связан с соответствующим оборудованием БПЛА из состава N групп,
в наземную часть системы связи введены модуль связи с ведущим и резервным БПЛА наземной части системы связи, с которым связаны две цепочки последовательно соединенных узлов, одна из которых состоит из первого передающего оптического модуля (ПОМ) и одного из двух оптических волокон из состава оптического кабеля, а вторая цепочка состоит из первого приемного оптического модуля (ПрОМ) и соответствующего волокна из состава оптического кабеля, также введен первый наземный аккумулятор с входом для подзарядки, подключенный ко всем узлам наземной части системы связи,
в НПУ введены второй приемный оптический модуль, соединенный по одному из двух оптических волокон из состава оптического кабеля с первым ПОМ, второй передающий оптический модуль, соединенный по соответствующему волокну из состава оптического кабеля с первым ПрОМ, выход второго приемного оптического модуля и вход второго передающего оптического модуля через распределитель сигналов подключены к вычислителю НПУ со входом/выходом для загрузки данных и внешнего контроля, который связан двухсторонними связями с монитором рабочего места оператора (РМО), пультом управления РМО, базой данных НПУ, наземным модулем хранения и обновления программ искусственного интеллекта и модулем хранения и обновления навигационных и других характеристик абонентов системы, также введен второй наземный аккумулятор со входом для подзарядки, подключенный ко всем узлам НПУ, причем, при необходимости, второй наземный аккумулятор через соответствующий выход с помощью полевого кабеля может быть подключен ко входу для подзарядки первого наземного аккумулятора,
при этом модуль связи с НПУ по радиоэфиру связан с модулем связи с ведущим и резервным БПЛА наземной части системы связи, а для обеспечения управления N группами БПЛА используется N наземных частей системы связи, каждая из которых связана волоконно-оптическим кабелем с соответствующим НПУ, при этом все НПУ соединяются между собой двухсторонними связями.
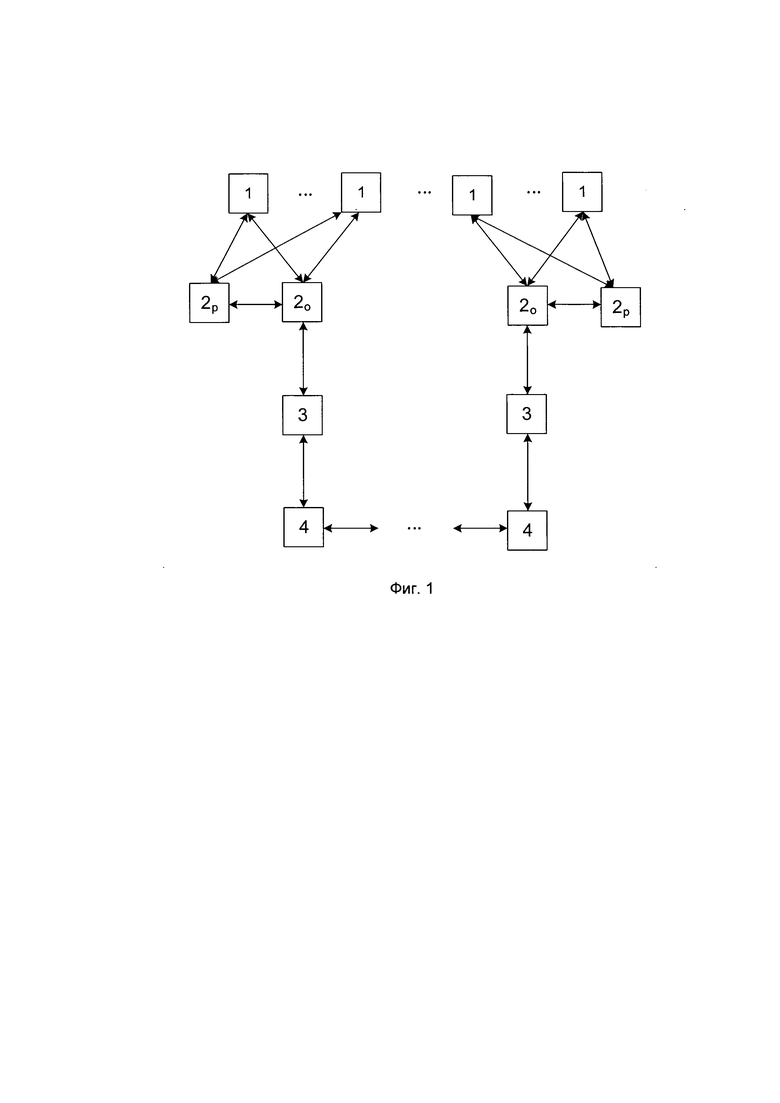
Изобретение поясняется структурными схемами, изображенными на фиг. 1 и фиг. 2, где введены обозначения:
1 - групповые беспилотные летательные аппараты (БПЛА) в составе N-й группы;
2 - основной ведущий (2o), резервный (2p) БПЛА;
3 - наземная часть системы связи;
4 - наземный пункт управления (НПУ).
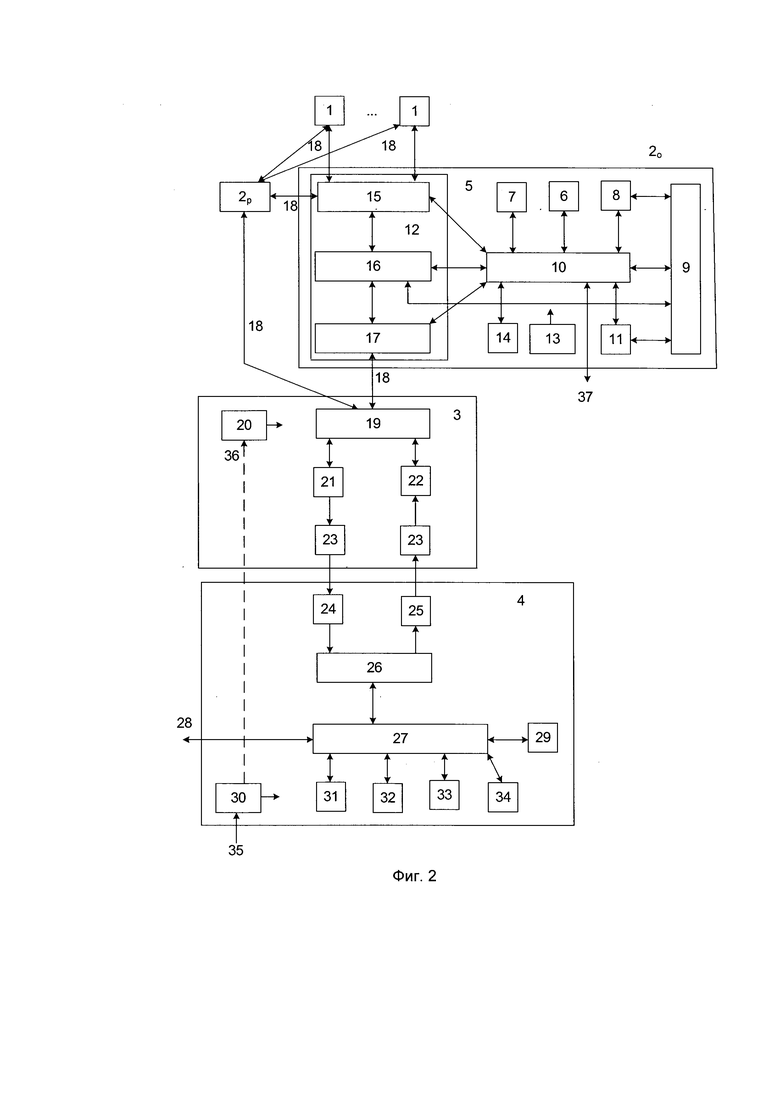
На фиг. 2 приведена расширенная структурная схема системы связи с БПЛА и введены обозначения:
5 - бортовой комплекс ведущего или резервного БПЛА;
6 - оптическая система;
7 - система радиотехнической разведки (РТР);
8 - пилотажно-навигационное оборудование (ПНО);
9 - блок преобразования телевизионных сигналов (БПТС);
10 - бортовая цифровая вычислительная машина (БЦВМ) с входом/выходом 37 для загрузки данных и внешнего контроля, взаимосвязи с бортовыми исполнительными подсистемами двигателем, рулями, автопилотом, и другими, на приведенными на фиг. 2;
11 - сервер-агрегатор;
12 - бортовая часть системы связи;
13 - бортовой аккумулятор, подключенный ко всем узлам бортовых комплексов 5 ведущего или резервного БПЛА;
14 - модуль хранения и обновления программ искусственного интеллекта (ИИ);
15 - модуль связи с БПЛА;
16 - преобразователь форматов данных;
17 - модуль связи с НПУ;
18 - радиоэфир;
19 - модуль связи с ведущим и резервным БПЛА;
20 - первый наземный аккумулятор с входом 36 для подзарядки, подключенный ко всем узлам наземной части системы связи 3;
21 - первый передающий оптический модуль (ПОМ);
22 - первый приемный оптический модуль (ПрОМ);
23 - оптические волокна из состава оптического кабеля;
24 - второй приемный оптический модуль;
25 - второй передающий оптический модуль;
26 - распределитель сигналов;
27 - вычислитель НПУ с входом/выходом 28 для загрузки данных и внешнего контроля;
29 - монитор рабочего места оператора (РМО);
30 - второй наземный аккумулятор, подключенный ко всем узлам НПУ с входом 35 для подзарядки;
31 - пульт управления РМО;
32 - база данных НПУ;
33 - наземный модуль хранения и обновления программ искусственного интеллекта;
34 - модуль хранения и обновления навигационных и других характеристик абонентов системы.
Сущность изобретения заключается в том, что для обеспечения защищенности оператора наземного пункта управления от осколков мин и самонаводящихся на радиоизлучение снарядов его рабочее место удаляют от излучающих средств системы связи на расстояние 100 м, информацию на наземную часть системы связи передают по волоконно-оптическому кабелю, не позволяющему обнаружить направление на убежище оператора с помощью аппаратуры радиотехнической разведки. Команды управления, формируемые на НПУ, для уменьшения длительности посылки формализуются -переводятся в двоичный код, известный всем абонентам системы, который затем модулируется сложным сигналом, имеющим малый уровень составляющих спектра выходного сигнала. Вынесение наземной части системы связи выше поверхности Земли позволяет исключить потери энергетического потенциала при укрытии оператора в окопе.
Расширении функциональных возможностей по управлению группой беспилотных летательных аппаратов связано с внедрением в систему элементов искусственного интеллекта: бесшовная непрерывная передача команд управления (хэндофф) групповыми БПЛА 1 с помощью ведущего 2o или резервного 2p БПЛА, распознавание искомых объектов с помощью процедуры корреляции цифровых масок их изображения, накладываемых на реальное видеоизображение, правильное разделение ортогональных кодов, которые являются адресами БПЛА, непрерывный мониторинг радиоэфира на предмет обнаружения помех, анализа его результатов, определение местоположения постановщика и параметров движения и передача этих сведений на НПУ в структурно-адресной части сообщения по прямому каналу связи, определение вероятностно-оптимальных частот, псевдослучайный выбор частоты и временного интервала для организации на них следующих сеансов передачи команд управления, уменьшение излучаемой мощности радиосигналов при близком нахождении от ведущего 2o или резервного 2p БПЛА, от НПУ 4 или групповых БПЛА 1 от ведущего 2o или резервного 2p БПЛА (режим адаптации по мощности).
В состав оборудования каждого беспилотного летательного аппарата предлагаемой системы радиосвязи входят бортовая цифровая вычислительная машина 10, соединенная двухсторонними связями с оптической системой 6, пилотажно-навигационным оборудованием 8, системой радиотехнической разведки 7, сервером-агрегатором 11, блоком преобразования телевизионных сигналов 9, который в свою очередь соединен двухсторонними связями с сервером-агрегатором 11 и ПНО 8. Для организации связей сервер-агрегатора 11 и БЦВМ 10 с узлами системы используются:
- сетевой канал информационного обмена (СКИО), который представляет собой полнодуплексные линии связи и информационного обмена по технологии FC (Fiber Channel) на основе волоконно-оптических каналов связи, в том числе с помощью СКИО обеспечивается обмен сообщениями между НПУ и наземной частью системы связи;
- видеоканал информационного обмена (ВКИО), который представляет собой линии связи, осуществляющие передачу видеоизображения (например, по стандартам ARINC 818, HDMI, LVDS и другие).
Бортовая цифровая вычислительная машина 10, как и сервер-агрегатор 11, представляют собой устройства вычислительной техники, построенные на основе многопроцессорной архитектуры и предназначенные для выполнения алгоритмических задач и/или построения графических объектов, решения навигационных и связных задач, вопросов дублирования друг друга, обслуживания элементов искусственного интеллекта.
Бортовые комплексы 5 ведущего 2o и резервного 2p БПЛА дополнительно содержат модуль хранения и обновления программ искусственного интеллекта, бортовую часть системы связи, состоящую из последовательно соединенных двухсторонними связями модуля связи с БПЛА, преобразователя форматов данных и модуля связи с НПУ, а также бортовой аккумулятор, подключенный ко всем узлам бортового комплекса 5. БЦВМ 10 соединена входами/выходами по СКИО с бортовой частью системы связи 12, сервером-агрегатором 11, блоком преобразования телевизионной информации 9, пилотажно-навигационным оборудованием 8, а также входами/выходами по ВКИО через БПТС 9 с бортовой системой связи 12.
Сервер-агрегатор 11 представляет собой устройство вычислительной техники, в котором имеются программные модули для реализации совместно с узлами 10 и 14 технологии искусственного интеллекта (в частности, машинного обучения, нейросетевых технологий, нечеткой логики). Сервер-агрегатор 11 на ведущем 2o и резервном 2p БПЛА предназначен для анализа текущей тактической ситуации и выработки оптимального решения для выполнения текущей задачи как отдельными БПЛА, так и их группой. Сервер-агрегатор 11 соединен входами/выходами по СКИО с БЦВМ 10 и через БЦВМ 10 с бортовой частью системы 12 связи, а также входами/выходами по ВКИО через БПТС 9 с бортовой частью 12 системы связи, пилотажно-навигационным оборудованием 8. После комплексной обработки поступившей информации в сервере-агрегаторе 11 синтезируется единое тактическо-информационное поле и программы применения группы БПЛА или отдельных БПЛА, которые поступают для подтверждения оператору НПУ 4 и после его одобрения передаются по сетевому каналу информационного взаимодействия в систему 3 связи для дальнейшей передачи по радиоканалу в каждый БПЛА группы, при этом, в случае несогласия оператора НПУ 4 с предложенными программами применения БПЛА, ему предоставляется возможность вручную через органы управления пульта 31 РМО задавать параметры применения для любого БПЛА группы или группы БПЛА в целом.
БПТС 9 представляет собой устройство для приема, коммутации, маршрутизации, преобразования и выдачи видео и телевизионных сигналов (изображений), поступающих на его входы, как в аналоговой, так и в цифровой форме.
Для повышения эффективности применения централизованного управления группой БПЛА с НПУ 4 через БПЛА, определенного ведущим 2o или резервным 2p, дублирующим ведущего 2o при его отсутствии, необходимо с помощью ИИ решение на его борту ряда частных функциональных задач, требующих выполнения комплексного анализа окружающей обстановки, принятия решений по управлению траекторией полета группы БПЛА после согласования с оператором НПУ 4. Комплексный анализ окружающей обстановки основан на автоматическом обнаружении и распознавании искомых объектов на основе корреляции их изображения с соответствующей цифровой маской искомого объекта, а также формировании соответствующих оценок выполнения условий полета группы БПЛА. Алгоритмы принятия решений должны учитывать оперативно возникающие факторы и угрозы внешней среды (тактическая ситуация, траекторные флуктуации, метеорологическая обстановка), отказы и повреждения и принимать необходимое решение, эффективное в текущих условиях в зависимости от текущей задачи. Например, оперативное формирование маршрута полета БПЛА при выполнении задач полета с учетом оперативно возникающих опасных факторов (противовоздушные средства, искусственные объекты на земле, метеорологическая обстановка) с учетом координат и параметров движения и структуры выявленных групп искомых объектов, оборонительное или тактическое маневрирование.
Формализация принципов решения указанных видов задач для применения алгоритмического аппарата с конечными состояниями затруднена или практически невозможна из-за множества необходимых учитываемых факторов объектов и среды, наличия свойств неоднозначности и неопределенности их параметров, наличия значительного множества вариантов развития ситуаций. В то же время решение значительной части подобных задач возможно путем применения технологий ИИ, преимущественно с использованием машинного обучения на основе нейросетей. При этом каждая указанная частная задача требует создания и обучения собственной нейросети, передачи полученного «опыта» резервному БПЛА. Поэтому применение нейросетевых технологий и машинного обучения требует значительных вычислительных ресурсов, которые с учетом специализированного характера вычислений могут быть достигнуты применением нейронных процессоров. В свою очередь нейропроцессоры на авиационной технике должны работать в условиях особых внешних воздействующих факторов. Это требует создания вычислительных средств с нейропроцессорами в авиационном исполнении.
Полетное задание, содержащее планы связи, - искомые объекты и их маски (сигнатуры), варианты задач для каждого БПЛА системы, в том числе и для ведущего 2o и резервного 2p БПЛА, на земле с помощью соответствующих программ загружается в БЦВМ 10 групповых БПЛА 1, ведущего 2o БПЛА и его дублера-резервного 2p БПЛА по входу/выходу 37 и по нему же осуществляется контроль правильности ввода данных и работоспособности БПЛА. Возможна коррекция полетного задания в процессе полета БПЛА по командам с НПУ 4, поступившим на борт по радиоканалу через обратный канал системы связи, с которой по СКИО они передаются в БЦВМ 10.
На мониторе 29 рабочего места оператора НПУ 4 в многоэкранном режиме или на отдельный экран, при необходимости, выводятся для отображения варианты задач для каждого БПЛА, полученные по СКИО от вычислителя НПУ 4. Оператор НПУ 4 выбирает задачу, которая передается по обратному каналу системы связи (НПУ 4 - ведущий 2o БПЛА - резервный 2p БПЛА - групповой БПЛА 1), а на борту с оборудования бортовой части системы 12 связи по СКИО через БЦВМ 10 в сервер-агрегатор 11 ведущего 2o БПЛА (или резервного 2p, если тот не исправен или ушел на посадку). При необходимости задачи могут быть скорректированы в процессе полета. Резервный 2p БПЛА дублирует функции ведущего 2o БПЛА при выходе его из строя или посадке для замены аккумулятора. Накопленный ведущим 2o БПЛА опыт, полученный в результате анализа процессов в существующей обстановке, с помощью узлов 14, 10, 16, 15 транслируется через узлы 15, 16, 10 на модуль 14 резервного БПЛА. Использование в системе связи элементов ИИ позволяет плавно перейти от управления групповыми БПЛА 1 ведущим 2o БПЛА к управлению резервным 2p БПЛА (провести процедуру хэндофф).
В БЦВМ 10 ведущего 2o и резервного 2p БПЛА, как и в групповых БПЛА1, по СКИО поступает информация о местоположении и высотно-скоростных параметрах от пилотажно-навигационного оборудования, информация об обстановке в оптическом и инфракрасном диапазоне от оптической станции 6, информация об источниках излучения от системы радиотехнической разведки (эта процедура осуществляется только в ведущем 2o и резервном 2p БПЛА). В целях повышения эффективности и качества решения задач, например, повышение точности определения собственного местоположения на основе данных с приемника глобальных навигационных спутниковых систем (ГЛОНАСС) полученная информация в БЦВМ 10 обрабатывается и комплексируется с другими данными.
Для создания комплексной картины тактической обстановки (комплексирование информации) в обеспечение успешного выполнения задач в сервер-агрегатор 11 ведущего 2o и резервного 2p БПЛА поступает информация с каждого БПЛА группы о его состоянии, вооружении, местоположении, запасе топлива (электроэнергии), а также информация о характеристиках обнаруженных группой БПЛА объектов (при наличии у БПЛА соответствующей аппаратуры, например, оптической системы и другой), которая может включать в себя в том числе информацию о местоположении объектов, направлении движения, скорости, вида объекта и т.п., передаваемая по радиоканалу в бортовую часть системы 12 связи ведущего 2o и резервного 2p БПЛА. Также в сервер-агрегатор 11 по СКИО от БЦВМ 10 поступает скомплексированная информация о местоположении и высотно-скоростных характеристиках искомых объектов (азимут, угол места, дальность, скорость), информация об обстановке в оптическом и инфракрасном диапазоне на фоне трехкоординатной цифровой карты местности, например, в виде матрицы высот и объектного состава (различные базы данных, например, инженерных сооружений, опасных зон, лесных массивов, справочной информации, весовых коэффициентов поправок и т.д.).
Также в целях комплексного распознавания искомых объектов путем сравнения их изображения с соответствующими масками, заложенными при предстартовой подготовке по входу/выходу 37, в сервер-агрегатор 11 через БПТС 9 по ВКИО поступает видеоизображение с БПЛА, которое передается по радиоканалу в бортовую часть системы 12 связи, и видеоизображение от оптической системы 6 ведущего 2o и резервного 2p БПЛА.
На основании полученной информации и выбранных искусственным интеллектом задач, сервер-агрегатор 11 совместно с узлами 10 и 14 с использованием адаптивных алгоритмов:
- проводит распознавание и идентификацию объектов на видеоизображении, сопоставляя его с заложенными масками искомых объектов;
- создает (синтезирует) единое тактическо-информационное поле, содержащее совокупность информации (координаты всех групповых БПЛА и обнаруженных объектов, тип объекта, скорость и т.д.) о всех известных объектах, в том числе наземных и морских, влияющих или могущих повлиять на выполнение полетного задания (БПЛА, радиолокационные станции, средства ПВО, ракеты, метеорологическая обстановка и т.д.);
- разрабатывает оптимальную программу применения для каждого выбранного БПЛА группы, включающая маршрут БПЛА, разрешения/запрет на использование БПЛА средств наблюдения и обнаружения, а также целевых нагрузок, включение/отключение у БПЛА режима радиомолчания и другие.
Информация о распознанных и идентифицированных объектах передаются в БЦВМ 10 для использования в целевых алгоритмах искусственного интеллекта и сбрасывается по прямому каналу системы связи (групповой БПЛА 1 - ведущий 2o (резервный 2p) БПЛА - НПУ) для отображения оператору НПУ 4 на экране монитора 29 рабочего места оператора для анализа и принятия решения.
Варианты программы применения выбранного группового БПЛА 1 передается в виде подсказки на экран монитора 29 оператору НПУ 4, который может из них что-то выбрать, подтвердить, изменить или отменить. В случае, если полетное задание предусматривает использование группы БПЛА, для выполнения задания сервер-агрегатор 11 подготавливает и направляет на соответствующие БПЛА единую программу применения для требуемой группы БПЛА. Оператор НПУ 4 может одобрить программу целиком или откорректировать задачи и/или программу для каждого БПЛА 1 группы. В случае подтверждения элементы маршрута и команды управления передаются для исполнения в групповой БПЛА 1 через бортовые части системы 12 связи.
При изменении элементов программы вследствие изменения внешней обстановки, состояния БПЛА и поступлении внешних команд с НПУ 4, делающих необходимым корректировку программы применения, сервер-агрегатор 11 формирует новый вариант программы применения.
При наличии сложной оперативно-тактической обстановки управление БПЛА переходит непосредственно к оператору НПУ 4. С помощью органов управления пульта 31 управления оператор НПУ выставляет требуемые параметры программы применения для БПЛА, например, роль БПЛА, маршрут движения, аспекты применения полезной нагрузки и т.д. и по обратному каналу системы связи в формализованном виде передает на ведущий 2o и резервный 2p БПЛА. Также возможен вариант непосредственного управления оператором НПУ 4 через ведущий 2o или резервный 2p БПЛА одним из группы БПЛА с помощью отдельных органов управления пульта 31, например, с помощью джойстика, трекбола и других элементов, вырабатывающих с помощью БЦВМ 10 формализованные команды управления, передаваемые по обратному каналу системы связи через ведущий 2o или резервный 2p БПЛА на вызываемый БПЛА.
Узлы 1-11 по назначению и составу аналогичны соответствующим узлам прототипа.
Бортовая часть 12 системы связи содержит в составе модуль 15 связи с БПЛА, преобразователь 16 форматов, в котором также в структурно-адресную часть сообщения с группового БПЛА 1 добавляется информация о соответствующих параметрах ведущего 2o (резервного 2p) БПЛА, и модуль 17 связи с НПУ 4 предназначена для организации высокоскоростного обмена данными между группой БПЛА и НПУ 4 с преобразованием входных и выходных форматов данных для согласования. Узлы бортовой части 12 системы связи могут быть выполнены на известных серийных элементах с разнесением частот на передачу и на прием с использованием псевдослучайного изменения рабочей частоты для повышения помехозащищенности [7]. Для уплотнения высокоскоростных каналов передачи информации с датчиков БПЛА в бортовой и наземной частях системы связи 12 и 3 могут использованы, например, методы кодового (с применением ортогональных кодов) разделения каналов [7, 8, 9]. Бортовая и наземная части 12 и 3 системы связи могут быть выполнены на элементах и процедурах, рассмотренных в патенте [10], а их антенны - всенаправленные для приема радиосигналов со всех направлений. В наземной части системы связи для повышения энергетического потенциала может быть использована также секторная антенна с шириной диаграммы направленности, например, 90°.
Бортовой аккумулятор 13, подключаемый ко всем узлам бортовых комплексов 5 ведущего 2o или резервного 2p БПЛА, конструктивно является съемным и имеет вход 36 для подзарядки.
С помощью вычислительной части узлов 10, 11 и 14 на борту и 27, 33 на НПУ 4 формируется интеллектуальная машина, при использовании которой появляется способность достижения поставленных перед ней целей. Сама такая машина будет воспринимать окружающий мир с помощью датчиков, и воздействовать на объекты в окружающей среде с помощью исполнительных механизмов при тщательном изучении алгоритмов поиска пути и принятия решений при использовании машинного обучения [11, 12] и процесса самостоятельного получения знаний в процессе ее работы [13-15]. Такое обучение без учителя позволяет распознать образы во входном потоке. Модуль 14 используется также для хранения цифровой трехкоординатной карты местности с объектным составом.
Радиоэфир 18 используется для организации высокоскоростных каналов между группой БПЛА и ведущим 2o (резервным 2p) БПЛА, а также между ведущим 2o (резервным 2p) БПЛА и НПУ 4, между ведущим 2o и резервным 2p БПЛА.
Модуль 19 предназначен для организации двухсторонней связи НПУ 4 с ведущим 2o и резервным 2p БПЛА. Для исключения потерь энергетического потенциала он (его антенна) может быть вынесен выше поверхности Земли, например, с помощью треноги. Узел 19 может быть выполнен на известных серийных элементах с разнесением частот прямого и обратного каналов на передачу и на прием с использованием псевдослучайного изменения рабочей частоты для повышения помехозащищенности [7]. Для снижения заметности излучений радиосигналов управления БПЛА и, следовательно, затруднения точности определения местоположения излучаемого средства с помощью устройств радиотехнической разведки все команды для уменьшения длительности посылки формализуются - переводятся в двоичный код, известный всем абонентам системы, который затем модулируется сложным сигналом, имеющим малый уровень составляющих спектра выходного сигнала [7].
Первый наземный аккумулятор 20, подключаемый ко всем узлам наземной части системы 3 связи с входом 36 для подзарядки конструктивно является съемным и серийно изготовляемым. При длительной работе для подзарядки первого наземного аккумулятора 20 может быть использована энергия второго наземного аккумулятора 30, подводимая, например, с помощью полевого кабеля марки П-274 (показано на фиг. 2 штриховой линией).
Первый и второй передающие оптические модули 21 и 25 предназначены для преобразования видеосигнала в оптический и могут быть реализованы на известных серийных изделиях.
Первый и второй приемные оптические модули 22 и 24 предназначены для преобразования оптического сигнала в видеосигнал и могут быть реализованы на известных серийных изделиях.
Оптические волокна 23 предназначены для передачи оптических сигналов с системы 3 связи на НПУ 4 и в обратном направлении. Они входят в состав оптического кабеля, укладываемого на грунт.
Узел 26 предназначен для распределения сигналов между ПОМ 25, ПрОМ 24 и вычислителем 27 НПУ и преобразования формата данных.
Вычислитель 27 НПУ предназначен для управления работой всех сопрягаемых с ним узлов, совместно с узлом 33 формирования интеллектуальной машины, его вход/выход 28 необходим для загрузки данных и внешнего контроля. Он может быть реализован на известных серийных изделиях.
Монитор 29 совместно с пультом 31 управления, базой 32 данных НПУ и вычислителем 27 НПУ необходимы для организации РМО. Он может работать в многоэкранном режиме, иметь несколько экранов, например, по числу БПЛА в группе и быть реализован на известных серийных изделиях.
Второй наземный аккумулятор 30, подключаемый ко всем узлам НПУ 4 с входом 35 для подзарядки, конструктивно является съемным. Аккумуляторы могут быть реализованы на известных серийных изделиях.
Пульт 31 обеспечивает управление всеми узлами НПУ 4, удаленными БПЛА 1, ведущим 2o и резервным 2p БПЛА. Он может быть реализован на известных серийных изделиях.
База 32 предназначен для хранения и обновления данных, вводимых в вычислитель НПУ 27 по входу/выходу 28, полученных в результате анализа текущей обстановки, оценки выполнения других процедур в системе, цифровой трехкоординатной карты местности с объектным составом. Она может быть реализована программно.
Модуль 34 необходим для хранения и обновления навигационных и других характеристик абонентов системы и собственных, получаемых с выходов приемников глобальных навигационных спутниковых систем, получаемых с удаленных объектов в структурно-адресной части принимаемых кодограмм. Он может быть реализован программно.
Расширение функциональных возможностей по управлению группой беспилотных летательных аппаратов связано с внедрением в систему элементов искусственного интеллекта - на борту БПЛА обеспечивают их функционирование БЦВМ 10, сервер-агрегатор 11, модуль 14 хранения и обновления программ искусственного интеллекта, а на НПУ 4 -вычислитель 27 с входом/выходом 28 для загрузки данных и внешнего контроля, наземный модуль 33 хранения и обновления программ искусственного интеллекта, а также для сопряжения с другими НПУ и внешними системами. Указанные выше узлы обеспечивают программными методами бесшовную непрерывную передачу команд управления (хэндофф) групповым БПЛА 1 с НПУ 4 через ведущий 2o или резервный 2p БПЛА, распознавание искомых объектов с помощью процедуры корреляции цифровых масок их изображения, накладываемых на реальное видеоизображение, правильное разделение ортогональных кодов, которые являются адресами БПЛА, непрерывный мониторинг радиоэфира на предмет обнаружения помех, анализа его результатов, запрета на прием ложных, имитируемых команд управления, определение местоположения постановщика и параметров движения и передача этих сведений на НПУ 4 в структурно-адресной части сообщения по прямому каналу связи, при этом с НПУ 4 сообщение будет передаваться с меньшей информационной скоростью (вводятся более сложные помехоустойчивы коды и соответствующие технологии [16] - адаптация по скорости, определение вероятностно-оптимальных частот, псевдослучайный выбор частоты и временного интервала для организации на них следующих сеансов передачи команд управления, уменьшение излучаемой мощности радиосигналов при близком нахождении ведущего 2o или резервного 2p БПЛА от НПУ или групповых БПЛА 1 от ведущего 2o или резервного 2p БПЛА, режим адаптации по мощности).
Групповые БПЛА 1 по составу практически совпадают с составом ведущего 2o или резервного 2p БПЛА за исключением наличия у них полезного груза со схемой управления, не показанными на фигурах: боеприпас, листовки и т.п.и отсутствием системы радиотехнической разведки, модуля связи с НПУ 4, аппаратуры связи между групповыми БПЛА 1, отдельных программ, не используемых в групповых БПЛА 1.
Конструктивно наземная часть системы 3 связи представляет собой два волокна в составе полевого волоконно-оптического кабеля, например, марки АрПОК1Х-5 мм (масса отрезка 100 м - 2,5 кг), оборудование РМО НПУ 4, представляет собой, например, ноутбук с пультом управления, имеющий клавиатуру, два джойстика (один джойстик необходим для управления по скорости, второй - для управления направлением полета). Указанные элементы совместно со съемным аккумулятором составляют единое целое, причем кабель наматывается на конструкцию узла 3 и легко разматывается с нее, обеспечивая оперативность связи. Для удобства конструкцию узла 3 можно установить, например, на треноге.
Вынесение наземной части системы связи, излучающей радиосигналы, от рабочего места оператора НПУ 4 на расстояние, например, 100 м, необходимо для защиты оператора от осколков мин и снарядов, пуль снайперов. В этом случае оператор может спрятаться в замаскированном окопе с убежищем типа «лисья нора» [17] и оттуда безопасно управлять БПЛА с помощью курсора по изображению ситуации и использованию других данных на экране монитора без потери энергетического потенциала из-за отражений от поверхности Земли.
Литература:
1. Патент РФ №2195774, опубл. 27.02.2002 г. Бюл. №36.
2. Патент РФ №2518054, опубл. 10.06.2014 г. Бюл. №16.
3. Патент РФ №2673680, опубл. 29.11.2018 г. Бюл. №34.
4. Патент РФ №2769017, опубл. 28.03.2022 г. Бюл. №30.
5. Ефимов Е., Дворецкий А. УР Класса «воздух-поверхность» // Зарубежное военное обозрение. - М., 1995. - №8. - С. 27-35.
6. Патент РФ №2809495, опубл. 12.12.2023 г. Бюл. №35 (прототип).
7. Скляр, Бернард. Цифровая связь. Теоретические основы и практическое применение. Изд. 2-е, испр.: Пер. с англ. - М.: Издательский дом "Вильяме", 2003. 1104 с.
8. Ратынский М.В. Основы сотовой связи / Под ред. Д.Б. Зимина - М.: Радио и связь, 1998. - 248 с.
9. Патент РФ №2809552, опубл. 12.12. 2023 г. Бюл. №35.
10. Патент РФ №2779925, опубл. 15.09. 2022 г. Бюл. №26.
11. ru.wikipedia.org>Искусственный интеллект
12. Машинное oбyчeниe: Russell&Norvig, 2003, pp.649-788.
13. ru.ruwiki.ru/wiki/Искусственный_интеллект#Начало
14. Рутковский Л. Методы и технологии искусственного интеллекта. - М.: Горячая линия-Телеком, 2010, - 520 с.
15. Макаров И.М. Искусственный интеллект и интеллектуальные системы управления. Отделение информационных технологий и вычислительных систем. - М.: Наука, 2006, -333 с.
16. Золотарев В.В., Овечкин Г.В. Помехоустойчивое кодирование. Методы и алгоритмы: Справочник / Под. ред. чл.-кор. РАН Ю.Б. Зубарева. - М.: Горячая линия-Телеком, 2004.
17. Спасение в «лисьей норе»: как пережидают артобстрелы. tvzvezda.ru>Новости>2022781627-jVRAM.html
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535922C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2690494C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2692696C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793150C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2505929C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544006C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2673680C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
Изобретение относится к радиосредствам обмена данными и может быть использовано для защиты операторов, участвующих в высокоскоростном информационном обмене информацией между беспилотными летательными аппаратами (БПЛА) и наземными пунктами управления (НПУ). Техническим результатом изобретения является повышение качества защищенного управления с НПУ и автоматической передачи с групповых БПЛА широкополосной информации и обработка ее как на групповых БПЛА, ведущем и резервном БПЛА, так и на рабочем месте оператора НПУ, удаление излучающих средств связи от местоположения оператора НПУ. Система радиосвязи с беспилотными летательными аппаратами дополнительно содержит ведущий и резервный БПЛА, передающие и приемные оптические модули, соединенные волоконно-оптическим кабелем, распределитель сигналов, вычислитель НПУ, монитор рабочего места оператора (РМО), пульт управления РМО, базу данных НПУ, наземный модуль хранения и обновления программ искусственного интеллекта, модуль хранения и обновления навигационных характеристик абонентов системы. 2 ил.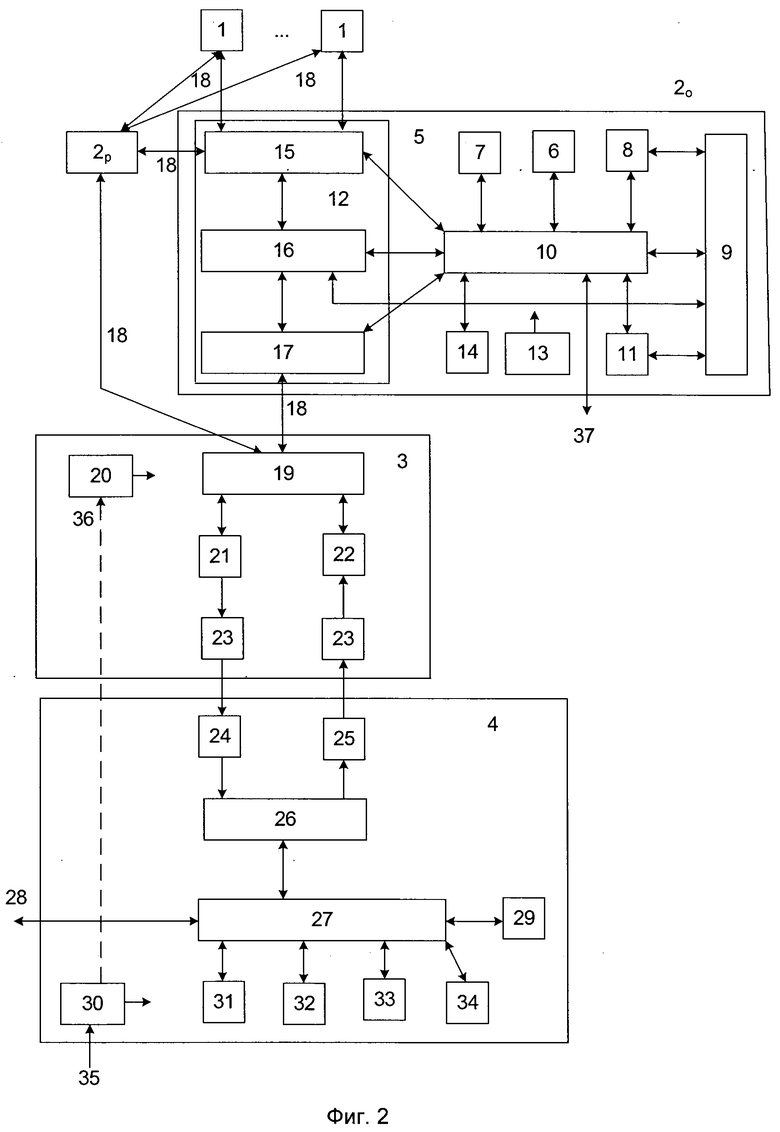
Система радиосвязи с беспилотными летательными аппаратами, содержащая наземный пункт управления (НПУ) с системой связи, N групп беспилотных летательных аппаратов (БПЛА), при этом каждый БПЛА содержит бортовую цифровую вычислительную машину (БЦВМ), соединенную двухсторонними связями с оптической системой, пилотажно-навигационным оборудованием (ПНО), системой радиотехнической разведки, сервером-агрегатором, блоком преобразования телевизионных сигналов, который в свою очередь соединен двухсторонними связями с сервером-агрегатором и ПНО, отличающаяся тем, что в качестве управляющих летательных аппаратов дополнительно введены связанные между собой по радиоэфиру ведущий и резервный БПЛА, причем бортовой комплекс каждого из них содержит те же блоки, что и БПЛА из состава N групп, и дополнительно содержит модуль хранения и обновления программ искусственного интеллекта, соединенный двухсторонними связями с БЦВМ, бортовую часть системы связи, состоящую из последовательно соединенных двухсторонними связями модуля связи с БПЛА, преобразователя форматов данных и модуля связи с НПУ, каждый из которых соединен двухсторонними связями с БЦВМ, также содержит бортовой аккумулятор, подключенный ко всем узлам бортового комплекса, при этом преобразователь форматов данных подключен двухсторонней связью к блоку преобразования телевизионных сигналов, а БЦВМ имеет вход/выход для загрузки данных и внешнего контроля, модуль связи с БПЛА по радиоэфиру связан с соответствующим оборудованием БПЛА из состава N групп, в наземную часть системы связи введены модуль связи с ведущим и резервным БПЛА наземной части системы связи, с которым связаны две цепочки последовательно соединенных узлов, одна из которых состоит из первого передающего оптического модуля (ПОМ) и одного из двух оптических волокон из состава оптического кабеля, а вторая цепочка состоит из первого приемного оптического модуля (ПрОМ) и соответствующего волокна из состава оптического кабеля, также введен первый наземный аккумулятор с входом для подзарядки, подключенный ко всем узлам наземной части системы связи, в НПУ введены второй приемный оптический модуль, соединенный по одному из двух оптических волокон из состава оптического кабеля с первым ПОМ, второй передающий оптический модуль, соединенный по соответствующему волокну из состава оптического кабеля с первым ПрОМ, выход второго приемного оптического модуля и вход второго передающего оптического модуля через распределитель сигналов подключены к вычислителю НПУ со входом/выходом для загрузки данных и внешнего контроля, который связан двухсторонними связями с монитором рабочего места оператора (РМО), пультом управления РМО, базой данных НПУ, наземным модулем хранения и обновления программ искусственного интеллекта и модулем хранения и обновления навигационных характеристик абонентов системы, также введен второй наземный аккумулятор со входом для подзарядки, подключенный ко всем узлам НПУ, причем второй наземный аккумулятор выполнен с возможностью подключения ко входу для подзарядки первого наземного аккумулятора через соответствующий выход с помощью полевого кабеля, при этом модуль связи с НПУ по радиоэфиру связан с модулем связи с ведущим и резервным БПЛА наземной части системы связи, а для обеспечения управления N группами БПЛА используется N наземных частей системы связи, каждая из которых связана волоконно-оптическим кабелем с соответствующим НПУ, при этом все НПУ соединяются между собой двухсторонними связями.
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2673680C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2769017C2 |
| WO 2024054628 A2, 14.03.2024 | |||
| CN 106209213 A, 07.12.2016 | |||
| CN 109841092 A, 04.06.2019. | |||

