Изобретение относится к области подъемных устройств и может быть использовано для подъема транспортабельных модулей-контейнеров на шасси транспортных средств и опускания их на площадку хранения.
Известны погрузочно-разгрузочные устройства транспортабельного модуля-контейнера для обслуживания модулей-контейнеров на терминалах производства компании Haacon group, Германия, например, модели 1889.10 [1] или 2689.12 [2], содержащие закрепляемые на модуле-контейнере четыре электромеханические опоры, каждая из которых имеет силовой корпус с выдвижной механической опорой двустороннего действия, с выдвижным штоком винтовым или реечным, оснащенным опорной плитой. Устройство также включает стойки крепления, механический привод для ручного режима работы или электромеханический привод для автоматического режима. Исходя из назначения рассматриваемых подъемных устройств они должны обеспечить подъем модулей-контейнеров на стандартную высоту не менее 1700 мм.
В данной конструкции электромеханической опоры требуемая высота подъема обеспечивается величиной хода выдвижного штока не менее 1700 мм. Данное устройство позволяет перемещать транспортабельный модуль-контейнер с шасси транспортного средства на площадку терминала и обратно. В транспортном положении электромеханические опоры в модели 1889.10/6286 убираются в нишу контейнера без выступания элементов их конструкции за габариты контейнера. В модели 2689.12-231700 грузоподъемные стойки в транспортном положении убираются вдоль транспортабельного модуля-контейнера с выступанием за его габариты.
Достоинствами данных систем является то, что электромеханические опоры с высокой степенью унифицированы, что они позволяют обеспечить ручной и автоматический режимы работы системы.
Недостатком данных погрузочно-разгрузочных устройств является то, что электромеханические опоры имеют большой размер по высоте, например для модели 1889.10/6286 высота опоры составляет 2340 мм, для 2689.12-231700 высота 2450 мм. Если учесть, что высота типовых контейнеров определена диапазоном (2100-2900) мм, то для низких контейнеров рассматриваемые опоры не удается разместить в транспортном положении без выступания за его габариты.
В тоже время иногда ставится задача, чтобы электромеханические опоры в транспортном положении не выступали за габариты контейнера. В этом случае, для контейнера, имеющего высоту 2100 мм, при требовании не выступания грузоподъемных стоек в транспортном положении за габариты контейнера, габаритная высота опоры в транспортном положении должна быть не более 1870 мм, что соизмеримо с размером стандартной высоты подъема кузова-контейнера, и что конструктивно не позволяет скомпоновать механизм с ходом выдвижного штока не менее 1700 мм.
Одним из вариантов решения задачи повышения компактности опоры по высоте может быть применение телескопического выдвижного штока. Известен винтовой телескопический домкрат [3], содержащий корпус с размещенным в нем во внешней, в виде цилиндрической втулки, и во внутренней телескопических направляющих телескопическим винтом, состоящим из коаксиально расположенных центрального и полого винтов с наружной резьбой одинакового шага, привод вращения центрального винта, телескопические направляющие имеют возможность продольного перемещения вдоль оси домкрата и зафиксированы от вращения внешней направляющей относительно корпуса, а внутренней направляющей - относительно внешней, отличающийся тем, что внутренняя телескопическая направляющая выполнена в виде резьбовой втулки, навинченной на полый винт, который навинчен на центральный винт, причем внутренняя резьба внутренней телескопической направляющей и полого винта выполнена в нижней части их длины, оба винта снабжены жестко закрепленным по профилю наружной резьбы на последнем ее витке во впадине профиля стопором, не выступающим за наружный диаметр резьбы, а полый винт имеет такой же стопор и на начальном витке своей наружной резьбы, при этом начальный и последний витки внутренней резьбы внутренней направляющей, как и последний виток внутренней резьбы полого винта, имеют уступ, высота которого равна высоте профиля резьбы, опора закреплена на верхнем торце внутренней направляющей соосно с центральным винтом, а на нижнем конце центрального винта, установленном на упорных подшипниках на основании корпуса, жестко закреплена коническая шестерня, зацепленная с другой приводной конической шестерней, шарнирно связанной с приводом через тягу.
Недостатком рассматриваемой конструкции является ограниченная осевая устойчивость винта, снижающая грузоподъемность конструкции, в связи с нарушением монолитности винта при переходе с одной ступени на другую. Так как центрирование винта по его оси обеспечивается только на длине сопряжения его с гайкой, то возможные перекосы винта из-за его не монолитности вызывают дополнительные моменты сопротивления вращению в паре винт-гайка, что дополнительно снижает КПД винтовой пары.
Наиболее близким к заявляемому изобретению по совокупности существенных признаков является погрузочно-разгрузочное устройство транспортабельного модуля-контейнера [4], которое содержит грузоподъемные стойки, каждая из которых имеет закрепленный на корпусе модуля-контейнера силовой корпус с выдвижной гидравлической опорой одностороннего действия, имеющей гидроцилиндр с выдвижным штоком, оснащенный опорной плитой, и источник гидропитания, включающий в себя емкость с рабочей жидкостью, гидронасос, магистраль низкого давления с обратным клапаном, соединяющую емкость с гидронасосом, напорную магистраль, соединяющую гидронасос с рабочей полостью гидроцилиндра, магистраль слива рабочей жидкости из гидроцилиндра, гидрозамок с управляемым отсечным клапаном и распределитель с ручным приводом для управления процессом выдвижения опоры. Каждая грузоподъемная стойка оснащена собственным источником гидропитания, все агрегаты которого закреплены на силовом корпусе стойки. Кроме того, каждая стойка оснащена навесным механизмом, который может складываться-раскладываться и поворачиваться, переводя опору из рабочего в транспортное положение и обратно, для уборки грузоподъемной стойки в углубления на корпусе кузова-контейнера.
Достоинством данной конструкции является то, что она позволяет получить погрузочно-разгрузочное устройство со стойками, каждая из которых может самостоятельно обеспечивать все грузоподъемные операции. Также каждая стойка может быть самостоятельно изготовлена, испытана и сертифицирована без установки ее на транспортабельном модуле-контейнере. Телескопическая конструкция опоры и навесной механизм крепления обеспечивают укладку стойки в углубления на корпусе кузова-контейнера без выступания за габариты контейнера.
Недостатком рассматриваемой конструкции является невысокий ресурс устройства, что присуще гидравлическим системам за счет ограничений по сроку использования уплотнений, необходимость дополнительного эксплуатационного обслуживания, связанного с применением гидравлических систем, высокая пожароопасность, связанная с возможностью возгорания рабочей жидкости.
Техническими задачами, на решение которых направлено заявляемое изобретение, являются:
- обеспечение высокой степени компактности устройства;
- обеспечение автоматизации процесса погрузки и разгрузки модуля-контейнера,
- повышение безопасности выполняемых операций,
- обеспечение повышенного ресурса устройства,
- снижение пожароопасности,
- сокращение объема эксплуатационного обслуживания.
Поставленные технические задачи решаются тем, что в погрузочно-разгрузочное устройство транспортабельного модуля-контейнера, содержащем грузоподъемные стойки, каждая из которых имеет силовой корпус с выдвижной опорой, имеющей выдвижной шток, оснащенный опорной плитой, при этом силовой корпус опоры закреплен на корпусе модуля-контейнера через механизм навесной, который может складываться-раскладываться и поворачиваться, переводя опору из рабочего в транспортное положение и обратно, согласно заявляемому изобретению, дополнительно введены датчик наклона модуля-контейнера по двум взаимно перпендикулярным осям, пульт управления, блок управления, кроме того, выдвижная опора с выдвижным штоком выполнены как винтовой телескопический механизм двустороннего действия с поворотным телескопическим винтом, состоящим из коаксиально расположенных центрального винта и полого винта, и ходовыми гайками, содержащий внутренние и внешние направляющие, зафиксированные от вращения и имеющие возможность продольного перемещения вдоль оси стойки, кроме того, в каждую грузоподъемную стойку дополнительно введены электродвигатель и редуктор, составляющие привод вращения телескопического винта, механизм ручного привода, датчик сложенного положения стойки, датчик оборотов телескопического винта, при этом телескопический винт через редуктор соединен с электродвигателем и входным валом ручного механизма, ось вращения телескопического винта соединена с валом датчика оборотов винта, причем, центральный винт в корпусе и полый винт во внешней направляющей установлены через свои подшипниковые опоры, которые расположены на конце каждого винта со стороны привода вращения телескопического винта, а датчики сложенного положения стойки, датчики оборотов телескопического винта, датчик наклона модуля-контейнера, пульт управления, электродвигатели электрически связаны с блоком управления.
Существенными отличительными признаками являются:
- выполнение выдвижной опоры с выдвижным штоком как винтовой телескопический механизм двустороннего действия с поворотным телескопическим винтом, состоящим из коаксиально расположенных центрального винта и полого винта, и ходовыми гайками, содержащий внутренние и внешние направляющие, зафиксированные от вращения и имеющие возможность продольного перемещения вдоль оси стойки;
- введение подшипниковых опор на каждую ступень телескопического винта, а именно, введение подшипниковых опор у центрального винта для крепления его в корпусе и у полого винта для крепления его во внешней направляющей, расположенных на конце каждого винта со стороны привода вращения телескопического винта;
- введение в каждую грузоподъемную стойку электропривода в составе электродвигателя и редуктора, представляющего собой привод вращения телескопического винта, механизма ручного привода, которые кинематически связаны с телескопическим винтом;
- введение датчика сложенного положения стойки;
- введение датчика оборотов телескопического винта, связанного с осью вращения винта;
- введение датчика наклона модуля-контейнера;
- введение пульта управления и блока управления, электрически связанного с пультом управления, с введенными датчиками и электродвигателем.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в погрузочно-разгрузочное устройство транспортабельного модуля-контейнера позволяет:
- значительно повысить компактность устройства, за счет выполнения выдвижной опоры с выдвижным штоком как винтовой телескопический механизм с обеспечением требуемой грузоподъемности за счет установки подшипниковых опор на каждой ступени винта, которые размещены на конце каждого винта со стороны привода;
- обеспечить высокую автоматизацию процесса погрузки и разгрузки модуля-контейнера, повысить безопасность выполняемых операций, за счет дополнительного введения в каждую грузоподъемную стойку электропривода, датчика сложенного положения и датчика оборотов телескопического винта и за счет введения в устройство датчика наклона модуля-контейнера по двум взаимно перпендикулярным осям, пульта управления, и блока управления с их связями.
- обеспечить повышение ресурса устройства, снижение пожароопасности и сокращение объема эксплуатационного обслуживания за счет использования электромеханических устройств взамен гидравлических по сравнению с прототипом.
- расширить эксплуатационные возможности, за счет введения механизма ручного привода.
Использование электромеханических грузоподъемных стоек, с введенными новыми элементами - датчиком сложенного положения стойки и датчиком оборотов телескопического винта, введение датчика наклона модуля-контейнера, пульта управления и блока управления и их связей с другими элементами системы, которые при их взаимодействии обеспечивают диагностику и управление устройством в процессе работы.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всей совокупности существенных признаков заявляемого изобретения. Это позволяет сделать вывод о соответствии заявляемого устройства критерию изобретения «новизна». Не обнаружено также применение указанных признаков в заявляемой совокупности с другими признаками для достижения указанного результата, следовательно, заявляемое устройство соответствует критерию изобретения «изобретательский уровень».
Техническая сущность предложенного погрузочно-разгрузочного устройства транспортабельного модуля-контейнера поясняется чертежами, на которых:
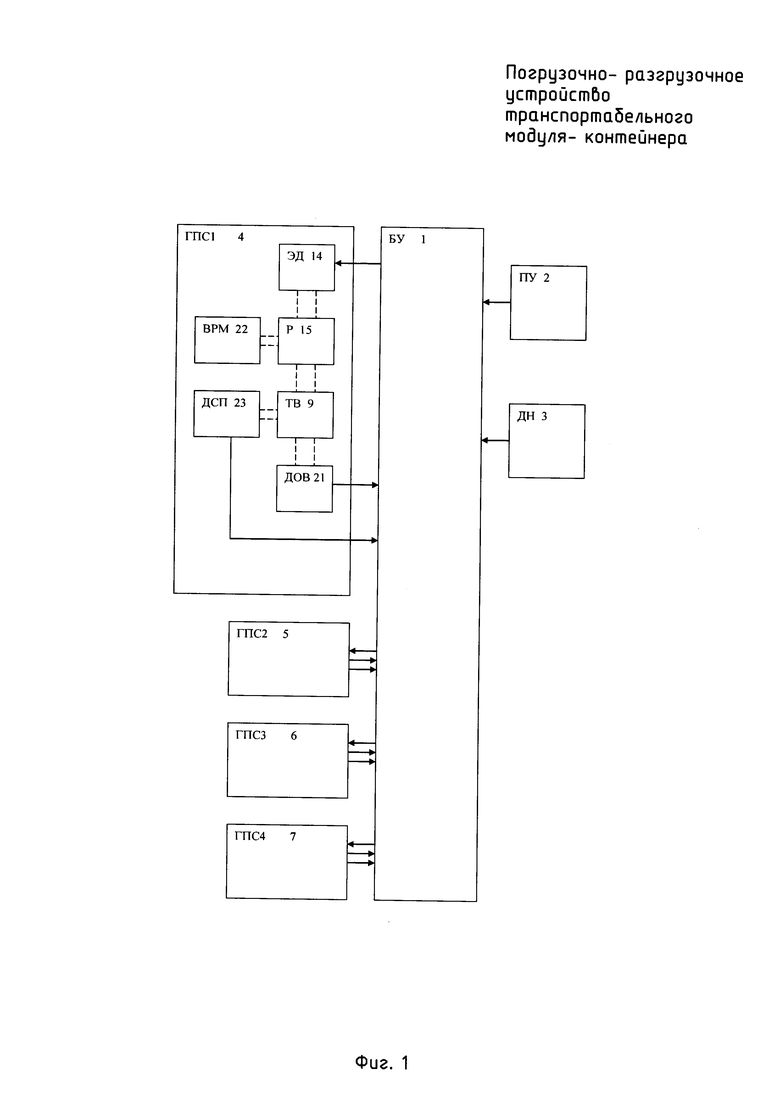
на фиг. 1 приведена структурная схема заявляемого погрузочно-разгрузочного устройства;
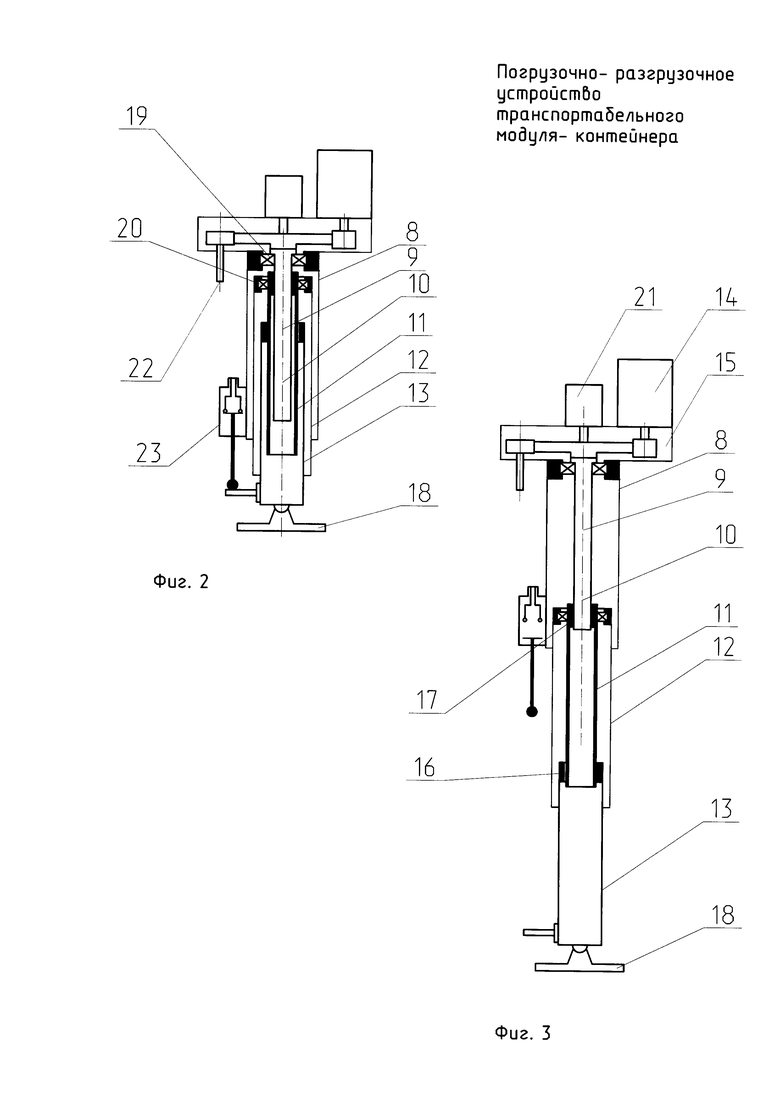
на фиг. 2 - грузоподъемная стойка в сложенном положении;
на фиг. 3 - грузоподъемная стойка в выдвинутом положении;
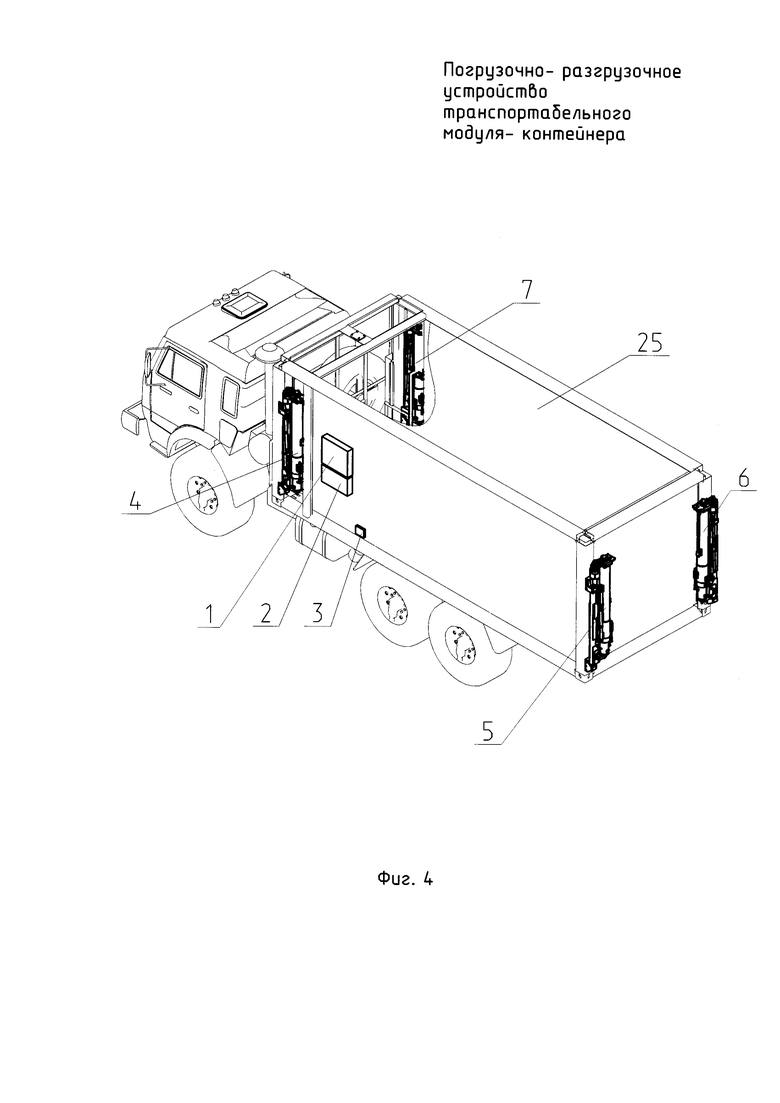
на фиг. 4 изображен транспортабельный модуль-контейнер, оборудованный предлагаемым погрузочно-разгрузочным устройством с грузоподъемными стойками в походном положении;
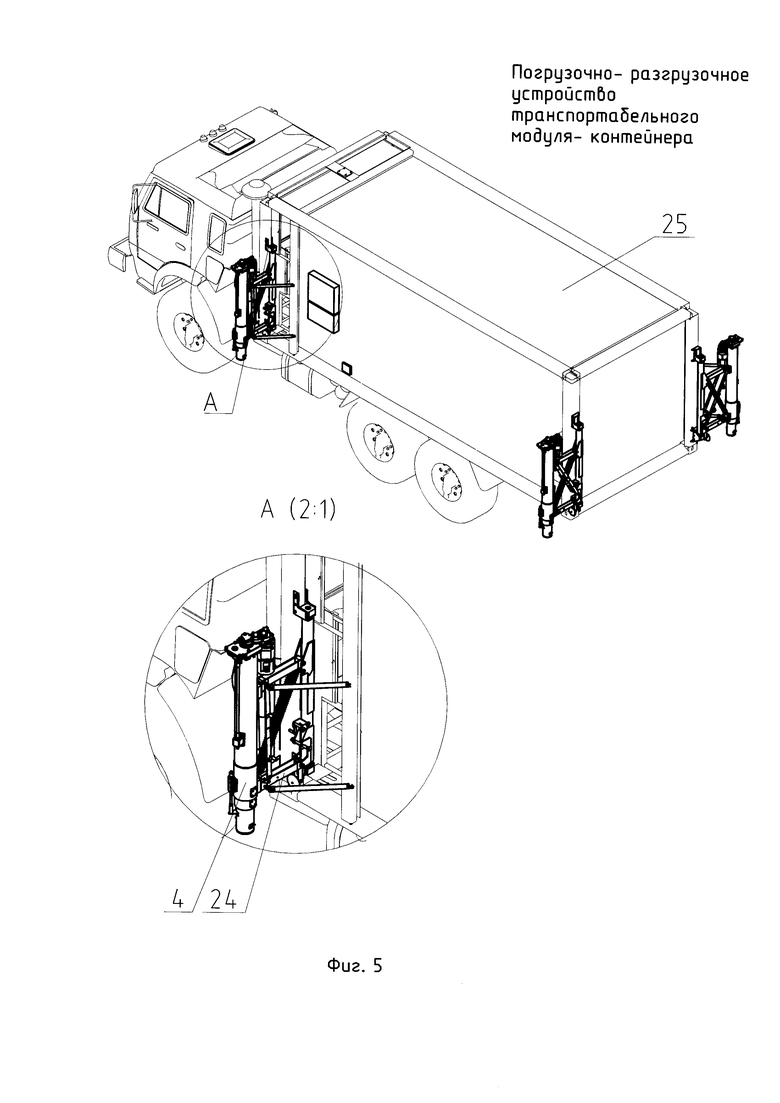
на фиг. 5 изображен транспортабельный модуль-контейнер, оборудованный предлагаемым погрузочно-разгрузочным устройством с грузоподъемными стойками с навесным механизмом в разложенном положении;
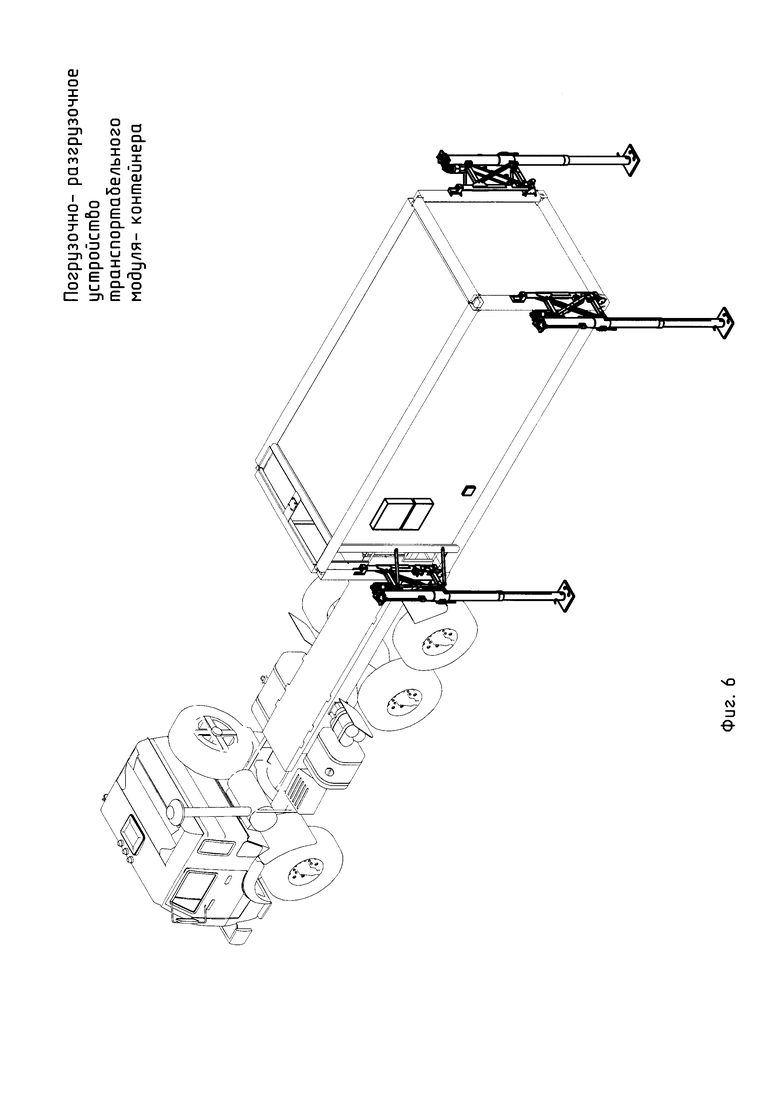
на фиг. 6 изображен транспортабельный модуль-контейнер, оборудованный предлагаемым погрузочно-разгрузочным устройством с грузоподъемными стойками, находящимися в разложенном положении.
Сокращения, принятые в тексте и на фигурах:
БУ - блок управления;
ВРМ - вал ручного механизма;
ГПС - грузоподъемная стойка;
ДН - датчик наклона;
ДОВ - датчик оборотов винта;
ДСП - датчик сложенного положения стойки;
КПД - коэффициент полезного действия;
ПУ - пульт управления;
Р - редуктор;
ТВ - телескопический винт;
ЭД - электродвигатель.
Погрузочно-разгрузочное устройство (фиг. 1) состоит из блока управления (БУ) 1, связанного электрически с пультом управления (ПУ) 2, датчиком наклона модуля-контейнера (ДН) 3 и четырьмя грузоподъемными стойками (ГПС1, ГПС2, ГПС3, ГПС4) 4, 5, 6, 7.
ГПС (фиг. 2 и фиг. 3) состоит из корпуса 8, телескопического винта (ТВ) 9, состоящего из коаксиально расположенных центрального винта 10 и полого винта 11, размещенного во внешней 12 и внутренней 13 телескопических направляющих. Электродвигатель (ЭД) 14 и редуктор (Р) 15 составляют привод вращения телескопического винта 10. Внутренняя телескопическая направляющая 13 через ходовую гайку 16 связана с полым винтом 11, который в свою очередь связан с центральным винтом 10 через ходовую гайку 17. На торце внутренней телескопической направляющей 13 соосно с центральным винтом 10 закреплена опорная плита 18. Центральный винт 10 со стороны привода вращения телескопического винта установлен через подшипниковую опору 19 в корпусе 8. Полый винт 11 со стороны привода вращения телескопического винта установлен через подшипниковую опору 20 во внешней телескопической направляющей 12. Вал датчика оборотов винта (ДОВ) 21 связан с осью вращения телескопического винта 10.
Привод вращения телескопического винта каждой грузоподъемной стойки, на примере условно первой стойки, содержит приводной электродвигатель 14, вход которого электрически соединен с блоком управления 1, а выходной вал механически связан с редуктором 15, выходной вал которого вращает телескопический винт 9, который также через редуктор связан с валом ручного механизма (ВРМ) 22, электрические сигналы с датчика сложенного положения стойки (ДСП) 23 и датчика оборотов винта (ДОВ) 21 поступают на блок управления 1.
Навесной рычажный механизм 24 (фиг. 5) предназначен для крепления ГПС на модуль-контейнер 25, а также для перевода ГПС из транспортного положения в рабочее с фиксацией в этом положении.
Погрузочно-разгрузочное устройство транспортабельного модуля-контейнера работает следующим образом при выполнении операции подъема модуля-контейнера:
С помощью навесного рычажного механизма 24 (фиг. 5) осуществляют перевод и фиксацию грузоподъемных стоек 4, 5, 6, 7 (фиг. 4) из транспортного положения в рабочее (фиг. 5). Далее, при поступлении управляющей команды оператора с пульта управления 2 (фиг. 1), в блоке управления 1 происходит формирование питающих напряжений на приводные электродвигатели 14 грузоподъемных стоек, в результате чего через редуктор 15 начинает вращаться центральный винт 10, что обеспечивает продольное перемещение вдоль оси стойки внешней направляющей 12 вместе с полым винтом 11 и ходовой гайкой 17, т.к. внешняя направляющая 12 зафиксирована от проворота в корпусе 8 конструктивным элементом в виде шпонки (не показана). При подходе ходовой гайки 17 к концу резьбы центрального винта 10 происходит касание конструктивных упоров (не показаны) и начинает вращаться полый винт 11 вместе с гайкой 17, в результате чего происходит продольное перемещение гайки 16 и внутренней телескопической направляющей 13 вдоль оси стойки, т.к. она зафиксирована от проворота во внешней направляющей 12 конструктивным элементом в виде шпонки (не показана). Таким образом, происходит подъем каждой грузоподъемной стойки. Датчик наклона 3 в процессе подъема формирует и передает в блок управления 1 сигналы пропорциональные отклонению вертикальной оси модуля-контейнера от направления вектора гравитационного поля Земли в двух взаимно перпендикулярных плоскостях. Блок управления 1, в зависимости от величин указанных сигналов, регулирует величины питающих напряжений приводных электродвигателей 14 грузоподъемных стоек 4, 5, 6, 7 таким образом, чтобы, путем изменения скорости движения подвижных частей грузоподъемных стоек, скомпенсировать в процессе подъема возможные отклонения вертикальной оси модуля-контейнера 25 от направления вектора гравитационного поля Земли.
В процессе вращения телескопического винта 9 в каждой грузоподъемной стойке 4, 5, 6, 7 датчик оборотов винта 21 передает в блок управления 1 последовательность импульсов напряжения, с постоянным количеством импульсов на один оборот винта. В блоке управления 1 выполняется арифметическая операция суммирования с накоплением числа импульсов, поступающих с датчика оборота винта 21, и сравнения полученной суммы с предустановленной пороговой величиной. Пороговая величина предустанавливается равной количеству импульсов датчика оборотов винта 21, получаемых за проход от полностью сложенного положения до полностью выдвинутого положения подвижной части грузоподъемной стойки. При достижении равенства накопленной суммы импульсов, для любой одной из опор, с пороговой величиной, блок управления 1 снижает до нуля напряжения, подаваемые на все электродвигатели 14. Вращение валов электродвигателей 14 прекращается, таким образом, достигается остановка грузоподъемных стоек на требуемой высоте без удара об механические ограничители, что существенно повышает надежность работы системы в целом. Пример поднятого положения модуля-контейнера приведен на фиг. 6.
Операция опускания модуля-контейнера 25 осуществляется в обратной последовательности, при этом отключение приводных двигателей осуществляется по сигналам датчиков сложенного положения 23. После чего переводом навесного рычажного механизма 24 в транспортное положение осуществляется укладка грузоподъемных стоек 4, 5, 6, 7 вдоль модуля-контейнера 25.
Во время подъема и опускания грузоподъемных стоек 4…7 в блоке управления 1 производится контроль и ограничение токов электродвигателей 14, а также непрерывный анализ наличия аварийных ситуаций.
Во включенном состоянии системы в блоке управления 1 непрерывно ведется анализ отклонения модуля-контейнера 25 от гравитационной вертикали. При превышении предельной величины отклонения система останавливает выполнение операции и сообщает данную информацию через пульт управления 2 оператору.
По командам с пульта управления 2 работу системы можно остановить в любом положении. Также возможен перевод системы в любое положение на любую высоту путем подачи соответствующих команд с пульта управления 2.
В случае отсутствия (неисправности) электрического источника питания, необходимого для функционирования системы, операции подъема и опускания модуля-контейнера 25 могут быть выполнены оператором (операторами) вручную, путем вращения вала ручного механизма 22.
Предлагаемое техническое решение в части введения подшипниковых опор на каждую ступень телескопического винта, а именно, введение подшипниковых опор у центрального винта для крепления его в корпусе и у полого винта для крепления его во внешней направляющей, которые при этом расположены на конце каждого винта со стороны привода, позволяет обеспечить жесткое устойчивое центрирование телескопического винта в местах перехода с одной ступени на другую, тем самым, повышая его осевую устойчивость и грузоподъемность стойки. При этом также обеспечивается дополнительная разгрузка сопряжения винт-гайка в винтовой передаче, что повышает КПД передачи за счет снижения моментов сопротивления по каждой ступени.
С учетом предлагаемых технических решений в ОАО «СКВ ПА» проведена разработка унифицированного электромеханического погрузочно-разгрузочного устройства кузова-контейнера по техническим требованиям Министерства обороны РФ для кузовов-контейнеров с габаритами по высоте 2100-2600 мм. Габариты грузоподъемной стойки по высоте не превысили 1870 мм, что позволило обеспечить их размещение без выступания за габариты контейнера, имеющего минимальную высоту 2100 мм.
Источники информации
1. Электронный каталог продукции компании Haacon group [Электронный ресурс], - https://www.haacon.com/de/hebesysteme/hebevorrichtungen/hebevorrichtung-188910-6226.php#scroll.
2. Электронный каталог продукции компании Haacon group [Электронный ресурс], - https://www.haacon.com/de/hebesysteme/hebevorrichtungen/hebevorrichtung-268912-schwenkbar.php#scroll.
3. Пат. на полезную модель 12566 Российская Федерация, МКП B66F 3/10. Винтовой телескопический домкрат / О.Ю. Свиязов, В.М. Казначеев. - №99111981/20, заявл. 03.06.1999, опубл. 20.01.2000, Бюл. №2.
4. Пат. 2211793 Российская Федерация, МКП B65D 90/14, B60P 1/64. Погрузочно-разгрузочное устройство транспортабельного модуля-контейнера / А.Ю. Парменов, М.З. Кардашенко, В.Н Ухов, заявитель и патентообладатель ООО "Гидротехника". - №2002100463/13, заявл. 15.01.2002, опубл. 10.09.2003, Бюл. №25.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2002 |
|
RU2211793C1 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| Электромеханическое грузоподъемное устройство с механизмом приведения в действие концевых выключателей | 2016 |
|
RU2645197C1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ НА БАЗЕ ШАССИ СПЕЦИАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2407658C1 |
| СПОСОБ КОНТРОЛЯ УСТАНОВКИ ЭЛЕКТРОУПРАВЛЯЕМОГО ПАКЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280148C2 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ | 2006 |
|
RU2313752C1 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
Изобретение относится к области подъемных устройств и может быть использовано для подъема транспортабельных модулей-контейнеров на шасси транспортных средств и опускания их на площадку хранения. Погрузочно-разгрузочное устройство транспортабельного модуля-контейнера содержит грузоподъемные стойки, каждая из которых имеет силовой корпус с выдвижной опорой, имеющей выдвижной шток, оснащенной опорной плитой, при этом силовой корпус опоры закреплен на корпусе модуля-контейнера через механизм навесной, который может складываться-раскладываться и поворачиваться, переводя опору из рабочего в транспортное положение и обратно, в устройство согласно изобретению дополнительно введены с соответствующими связями датчик наклона модуля-контейнера по двум взаимно перпендикулярным осям, пульт управления, блок управления, кроме того, выдвижная опора с выдвижным штоком выполнены как винтовой телескопический механизм двустороннего действия с поворотным телескопическим винтом, состоящим из коаксиально расположенных центрального винта и полого винта, и ходовыми гайками, содержащий внутренние и внешние направляющие, зафиксированные от вращения и имеющие возможность продольного перемещения вдоль оси стойки, кроме того, в каждую грузоподъемную стойку дополнительно введены электродвигатель и редуктор, составляющие привод вращения телескопического винта, механизм ручного привода, датчик сложенного положения стойки, датчик оборотов телескопического винта. Предлагаемое изобретение позволяет значительно повысить компактность устройства с обеспечением требуемой грузоподъемности, обеспечить высокую автоматизацию процесса погрузки и разгрузки модуля-контейнера, повысить безопасность выполняемых операций, обеспечить повышение ресурса устройства, снижение пожароопасности и сокращение объема эксплуатационного обслуживания, расширить эксплуатационные возможности. Использование электромеханических грузоподъемных стоек с введенными новыми элементами управления и их связями с другими элементами устройства позволяет при их взаимодействии обеспечить диагностику и управление устройством в процессе работы. 6 ил.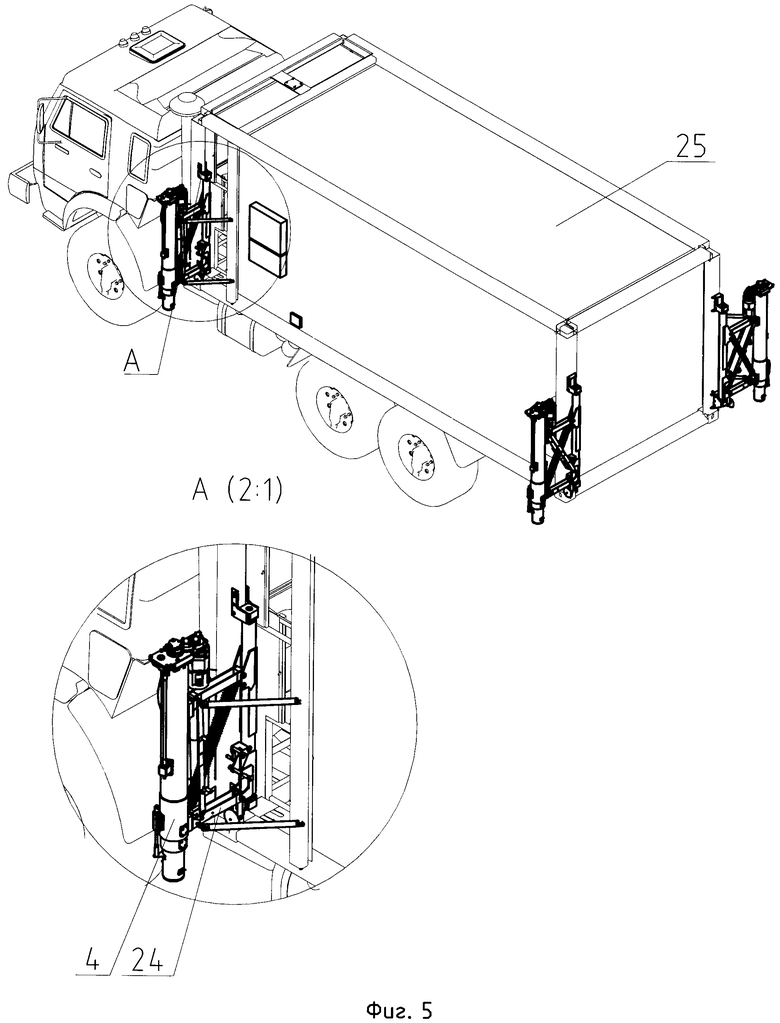
Погрузочно-разгрузочное устройство транспортабельного модуля-контейнера, содержащее грузоподъемные стойки, каждая из которых имеет силовой корпус с выдвижной опорой, имеющей выдвижной шток, оснащенной опорной плитой, при этом силовой корпус опоры закреплен на корпусе модуля-контейнера через механизм навесной, который может складываться-раскладываться и поворачиваться, переводя опору из рабочего в транспортное положение и обратно, отличающееся тем, что введены датчик наклона модуля-контейнера по двум взаимно перпендикулярным осям, пульт управления, блок управления, кроме того, выдвижная опора с выдвижным штоком выполнены как винтовой телескопический механизм двустороннего действия с поворотным телескопическим винтом, состоящим из коаксиально расположенных центрального винта и полого винта, и ходовыми гайками, содержащий внутренние и внешние направляющие, зафиксированные от вращения и имеющие возможность продольного перемещения вдоль оси стойки, кроме того, в каждую грузоподъемную стойку дополнительно введены электродвигатель и редуктор, составляющие привод вращения телескопического винта, механизм ручного привода, датчик сложенного положения стойки, датчик оборотов телескопического винта, при этом телескопический винт через редуктор соединен с электродвигателем и входным валом ручного механизма, ось вращения телескопического винта соединена с валом датчика оборотов винта, причем центральный винт в корпусе и полый винт во внешней направляющей установлены через свои подшипниковые опоры, которые расположены на конце каждого винта со стороны привода вращения телескопического винта, а датчики сложенного положения стойки, датчики оборотов телескопического винта, датчик наклона модуля-контейнера, пульт управления, электродвигатели электрически связаны с блоком управления.
| EA 201201183 A1, 28.02.2014 | |||
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2002 |
|
RU2211793C1 |
| Запорный клапан для фонтанирующих буровых скважин | 1924 |
|
SU12566A1 |
| DE 0020017151 U1, 21.12.2000. | |||

