ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области рекуперации энергии торможения грузоподъемных и транспортных машин, а также таких как гибридные силовые установки с ДВС и электромобили, а также к устройствам для осуществления указанной технологии.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известно устройство рекуперации энергии торможения машины [1] (Леонов И.В. Патент RU №2513192, зарегистрированный 24 декабря 2012. Опубл. 20.04.2014, бюл. №11). Известное устройство [1] содержит корпус, управляющее устройство, валы, маховик, редукторы с неподвижными осями, сцепление, тормоз, тяговый двигатель, ведущие колеса машины, трансмиссию, связывающую тяговый двигатель с ведущими колесами машины, планетарный дифференциал, состоящий из солнечной шестерни и центрального зубчатого колеса, а также водила с сателлитом, причем, валы тягового двигателя и трансмиссии соединены между собой с помощью редуктора с неподвижными осями, центральное зубчатое колеса соединено с трансмиссией, водило соединено с тормозом, а маховик соединен с солнечной шестерней.
Известное устройство [1] осуществляет рекуперацию энергии торможения путем переключения тягового электрического двигателя в режим электрогенератора. При рекуперации перекачка энергии из маховика и обратно осуществляется посредством изменения передаточного отношения кинематической цепи планетарного дифференциала [2] между трансмиссией и маховиком посредством воздействия управляющего устройства на тяговый электрический двигатель и тормоз.
Недостатком известного устройства [1] является сложность системы управления, которая заключается в потребности управляющего устройства переключения тягового электрического двигателя и тормоза, выключение и включение которого вызывает резкое изменение передаточного отношения и нагрузки, что ограничивает область применения рекуперации энергии торможения машины и снижает экономичность машины, работающей в режиме «разгон-торможение» [3].
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание устройства, которое обеспечивает рекуперацию энергии торможения путем расширения области управления рекуперации энергии торможения машины за счет более точного и гибкого изменения передаточного отношения. Поставленная цель достигается тем, что обмен кинетической энергии между маховиком и трансмиссией машины производится посредством изменения передаточного отношения кинематической цепи планетарного дифференциала электромеханического аккумулятора энергии, состоящего из планетарного дифференциала, выходные валы которого соединены с трансмиссией машины, управляющей обратимой электрической машины и маховиком.
Новые полезные свойства предлагаемого устройства, расширяющего область применения его на машины с ДВС и позволяющего производить рекуперацию энергии в широком диапазоне скоростей и нагрузок, появляются в результате плавного управления передаточного отношения кинематической цепи планетарного дифференциала электромеханического устройства путем регулирования скорости управляющей обратимой электрической машины.
Известно электромеханическое устройство рекуперации энергии торможения, включающее корпус, управляющее устройство, валы, маховик, редукторы с неподвижными осями, сцепление, тормоз, тяговый электрический двигатель, ведущие колеса машины, трансмиссию, связывающую тяговый электрический двигатель с ведущими колесами машины, планетарный дифференциал, состоящий из солнечной шестерни и центрального зубчатого колеса, а также водила с сателлитом, причем валы тягового двигателя и трансмиссии соединены между собой с помощью редуктора с неподвижными осями, центральное зубчатое колеса соединено с трансмиссией, водило соединено с тормозом, а маховик соединен с солнечной шестерней.
Существенные признаки предлагаемого устройства, которые совпадают с признаками аналога, заключаются в том, что оба устройства рекуперации энергии торможения включают корпус, управляющее устройство, валы, маховик, редукторы с неподвижными осями, сцепление, ведущие колеса машины, трансмиссию, связывающую тяговый двигатель с ведущими колесами машины, планетарный дифференциал, состоящий из солнечной шестерни и центрального зубчатого колеса, а также водила с сателлитом.
Предлагается устройство, отличающееся тем, что дополнительно включает управляющую обратимую электрическую машину, вал которой соединен с солнечной шестерней, а маховик соединен с водилом, отличающееся также тем, что дополнительно снабжено тормозом центрального зубчатого колеса, соединяющего его с корпусом.
Важные признаки предлагаемого устройства, которые совпадают с признаками аналога, заключаются в том, тяговый двигатель соединен с трансмиссией. Однако эти признаки свойственны многочисленным другим транспортным машинам.
Существенное отличие предлагаемого устройства от аналога заключаются в различном соединении валов планетарного дифференциала с трансмиссией и маховиком.
Основная совокупность существенных признаков заявляемого устройства, позволяющая реализовать достижение заявленного технического результата, заключается в том, что дополнительно включает управляющую обратимую электрическую машину, вал которой соединен с солнечной шестерней, а маховик соединен валом с водилом.
Достижение заявленного технического результата обеспечивается тем, что обмен кинетической энергии между маховиком и трансмиссией машины при рекуперации энергии торможения машины производится посредством изменения передаточного отношения кинематической цепи планетарного дифференциала между маховиком и трансмиссией машины за счет плавного изменения скорости управляющей обратимой электрической машины.
Сравнение свойств заявляемого и известного решений показывает, что у заявляемого решения появляются новые свойства, не совпадающие со свойствами известных решений, и что заявляемое решение обладает существенными отличиями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
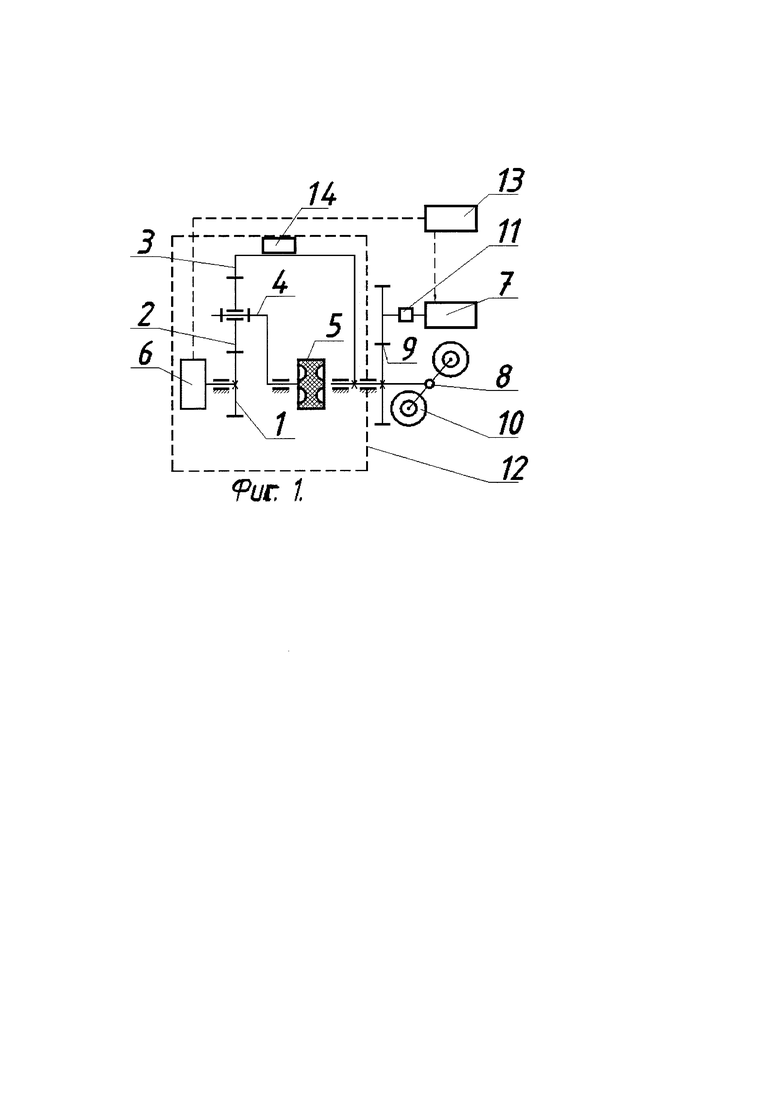
На фиг. 1 изображена схема электромеханического устройства рекуперации энергии торможения. Сущность изобретения поясняется семой кинематической схемой фиг. 1, где: 1 - солнечная шестерня (планетарного дифференциала); 2 - сателлит; 3 - центральное зубчатое колесо; 4 - водило; 5 - маховик; 6 - управляющая обратимая электрическая машина; 7 - тяговый двигатель; 8 - трансмиссия; 9 - редуктор с неподвижными осями; 10 - ведущие колеса, 11 - сцепление; 12 - электромеханический аккумулятор; 13 - управляющее устройство.
Устройство и принцип работы и плоского планетарного дифференциала общеизвестны и приведены в [2]. Солнечная шестерня 1 планетарного дифференциала соединена с управляющей обратимой электрической машиной 6. Водило 4 соединено с маховиком. Центральное зубчатое колесо 3 соединено с трансмиссией 8. Редуктор с неподвижными осями 9 соединяет трансмиссию 8 со сцеплением 11, которое в свою очередь соединяет его с тяговым двигателем 7. Ведущие колеса соединены с трансмиссией 8. Управляющее устройство 13 соединено электрическими цепями с управляющей обратимой электрической машиной 6 и тяговым двигателем.
Работа устройства
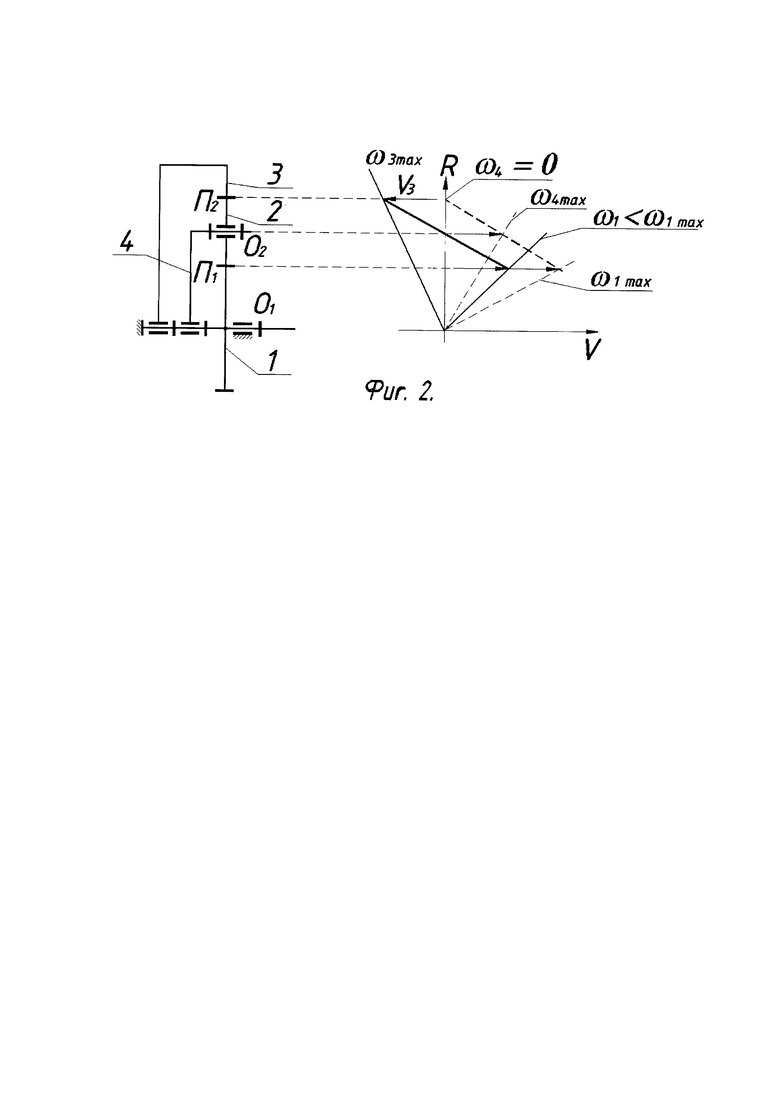
На фиг. 2 изображена кинематическая схема планетарного дифференциала, рядом с которой изображены планы скоростей его звеньев в виде лучей, исходящих из начала координат: V - скорость точки на радиусе r зубчатого колеса, П1 и П2 - полюса зацепления зубчатых колес планетарного дифференциала, в которых их линейные скорости равны между собой. План скоростей соответствует планетарному дифференциалу со степени подвижности, равной двум.
На фиг. 2 показано состояние скоростей звеньев планетарного дифференциала на стоянке машины и в конце разгона до номинальной скорости машины. Скорость вращения каждого зубчатого колеса планетарного дифференциала пропорциональна углу наклона лучей к оси радиуса r на плане скоростей фиг. 2. При совпадении лучей с осью r скорость вращения звена равна нулю.
Пунктиром на фиг. 2 показано состояние скоростей звеньев планетарного дифференциала на стоянке машины, при которой скорость V3 центрального колеса 3, трансмиссии 8 и ведущих колес 10 машины равны нулю при выключенном сцеплении 11. Маховик 5 и водило 4 вращаются с максимальной скоростью, а скорость центра водила V02 максимальна. V1 - скорость в полюсе зацепления П1 колес 1 и 2, зависящая от скорости управляющей обратимой электрической машины 6, которая на стоянке машины также имеет максимальное значение (ω1)max.
С началом движения машины управляющее устройство 13 снижает скорость управляющей обратимой электрической машины 6, работающей в режиме двигателя. В некоторых случаях для экономии электрической энергии, идущей на управление, возможно переключение обратимой электрической машины в режим генератора. В конце разгона до номинальной скорости движения скорость управляющей обратимой электрической машины 6 и солнечной шестерни менее (ω1)max. При этом скорость центрального колеса достигает максимального значения (ω3)max. В то же самое время скорость водила и маховика принимают нулевые значения. План скоростей, показанный непрерывными линиями, перемещается влево и соответствует механизму со степенью подвижности, равной единице. Скорость трансмиссии V3 увеличивается по сравнению со значениями на стоянке, маховик 5 отдает свою энергию и его скорость снижается V1 по сравнению с максимальными значениями на стоянке. Скорость трансмиссии 8 регулируется скоростью тягового двигателя 7.
При установившемся движении машины наблюдается баланс сил движущих и сопротивления. Поэтому мощность тягового двигателя 8 передается кинематической цепью через сцепление 11, конструкция которого не показана на фиг. 1 ввиду общеизвестности устройства [2]), и через трансмиссию 8 ведущим колесам 10. При разгоне дисбаланс сил движущих и сопротивления нарушается и дополнительная энергия передается от маховика 5 через центральное зубчатое колесо 3 и трансмиссию 13 ведущим колесам 10.
При торможении машины дисбаланс сил движущих и сопротивления нарушается в обратную сторону, что вызывает изменение направления движения энергии от ведущих колес 10 через планетарный дифференциал в маховик 5.
Прекращение движения машины вызывается снижением мощности тягового двигателя 7 и при необходимости использованием тормозной системы машины.
Нижеследующая талица состояний планетарного редуктора дает информацию о скоростях звеньев на номинальном режиме движения и на стоянке машины.

Реализация заднего хода машины может производится переключением управляющей обратимой электрической машины на обратное направления вращения.
По лучшему варианту устройства предусмотрено сцепление 11, выключение которого позволяет сохранить кинетическую энергию маховика 5 при остановке тягового двигателя 7 и ведущих колес 10 машины.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Заявляемое устройство позволяют повысить эффективность расхода энергии грузоподъемных и транспортных машин с приводом от ДВС и снизить расход энергии по сравнению с известными устройствами. Применение его позволяет снизить потери энергии и повысить экономичность машин на любых неустановившихся режимах работы путем изменения передаточного отношения между трансмиссией машины и маховиком, что позволяет производить полную рекуперацию энергии торможения.
Лучшими качествами обладает устройство, управляемое путем поддержания постоянного значения запаса кинетической энергии трансмиссии транспортной машины и маховика. Моделирование показало [4], что в соответствии с заявленным изобретением может оно быть реализовано с обеспечением безопасности работы.
Источники информации
1. Леонов И.В., Барбашов Н.Н. Патент RU №2438884 С2, МПК7, зарегистрирован 10.01.2012.
2. И.И. Артоболевский. Теория механизмов и машин. - М.: Наука. 1975. 640 с.
3. Барбашов Н.Н., Леонов И.В. «Энергетическая модель механизма с маховичным аккумулятором энергии». Вестник МГТУ им. Н.Э. Баумана. №4. - 2010 г.
4. Леонов И.В. Сравнение методов проектирования планетарных редукторов с использованием ЭВМ. Известия вузов. Машиностроение. 2016. №7. С. 1-5.
Изобретение относится к устройствам осуществляющим рекуперацию энергии торможения. Электромеханическое устройство рекуперации энергии торможения включает корпус, управляющее устройство, валы, маховик, редукторы с неподвижными осями, сцепление, тормоз, тяговый электрический двигатель, ведущие колеса машины, трансмиссию, связывающую тяговый электрический двигатель с ведущими колесами машины, планетарный дифференциал, состоящий из солнечной шестерни и центрального зубчатого колеса, а также водила с сателлитом. Валы тягового двигателя и трансмиссии соединены между собой с помощью редуктора с неподвижными осями, центральное зубчатое колесо соединено с трансмиссией, водило соединено с тормозом, а маховик соединен с солнечной шестерней. Дополнительно включает управляющую обратимую электрическую машину, вал которой соединен с солнечной шестерней, маховик соединен с водилом. Устройство дополнительно снабжено тормозом центрального зубчатого колеса, соединяющего его с корпусом. Обеспечивается расширение области управления рекуперации энергии торможения машины за счет более точного и гибкого изменения передаточного отношения. 1 з.п. ф-лы, 2 ил.
1. Электромеханическое устройство рекуперации энергии торможения, включающее корпус, управляющее устройство, валы, маховик, редукторы с неподвижными осями, сцепление, тормоз, тяговый электрический двигатель, ведущие колеса машины, трансмиссию, связывающую тяговый электрический двигатель с ведущими колесами машины, планетарный дифференциал, состоящий из солнечной шестерни и центрального зубчатого колеса, а также водила с сателлитом, причем валы тягового двигателя и трансмиссии соединены между собой с помощью редуктора с неподвижными осями, центральное зубчатое колесо соединено с трансмиссией, водило соединено с тормозом, а маховик соединен с солнечной шестерней, отличающееся тем, что дополнительно включает управляющую обратимую электрическую машину, вал которой соединен с солнечной шестерней, маховик соединен с водилом.
2. Устройство по п. 1, отличающееся тем, что дополнительно снабжено тормозом центрального зубчатого колеса, соединяющего его с корпусом.
| УСТРОЙСТВО РЕКУПЕРАЦИИ ЭНЕРГИИ ТОРМОЖЕНИЯ МАШИНЫ | 2012 |
|
RU2513192C1 |
| US 4423794 A1, 03.01.1984 | |||
| US 5603671 A1, 18.02.1997 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО РЕКУПЕРАЦИИ ЭНЕРГИИ ТОРМОЖЕНИЯ | 2012 |
|
RU2488501C1 |

