Изобретение относится преимущественно к гусеничным машинам (транспортным средствам - ТС) с распределением мощности между ведущими колесами.
Значительную часть времени движения ТС находится в повороте в широком диапазоне изменения сопротивления движению. Кроме того, и при прямолинейном движении ТС неодинаковое сопротивление движению под левыми и правыми бортами (гусеницами или колесами) обусловливает неустойчивость заданного режима движения.
Устойчивость, управляемость, тягово-динамические характеристики, проходимость на местности современных ТС, формирующие тактико-технические характеристики (ТТХ) или технико-эксплуатационные характеристики (ТЭХ) обеспечиваются установкой на их шасси механизмов распределения мощности (МРМ) между «бортами» - левым(и) и правым(и) ведущим(и) колесом(ми) и/или между колесными осями (мостами), которые во многих литературных источниках (в основном в отношении к гусеничным машинам) называют механизмами передачи и поворота (МПП) [1. Расчет и конструирование гусеничных машин / Н.А. Носов и др.; под ред. проф. Н.А. Носова. - П.: Машиностроение, 1972. - 560 с. - Гл. IX «Механизмы поворота, С.346-398; 2. RU 2634062 С1, В60К 17/35, F16H 48/30, F16H 37/08, 23.10.2017].
Особая разновидность гусеничных ТС - транспортные машины на четырехгусеничных шасси, которые выполняют либо сочлененными (двух- и многосекционными), либо односекционными (монокорпусными).
Более распространены шасси с двумя поворотными гусеничными тележками, установленными последовательно: в разное время, серийно выпускались вездеходы БТ361А-01 «Тюмень», СВГ-701 «Ямал», УРАЛ 5920, Husky 8 и др.; известны технические решения, описанные в источниках [3. US 3265146 «Steering system for four-track snow vehicles», 1966 г.] и [4. SU 1152854 «Гусеничная машина», 1985 г.].
В случае использования механической трансмиссии и активных секций в конструкции машины появляется весьма сложное сцепное устройство, на которое возлагаются дополнительно и функции механизма поворота [5. Двухзвенные транспортеры ДТ-10 и ДТ-10П: техническое описание и инструкция по эксплуатации. - М.: «Военное издательство», 1988. - 160 с].
По-видимому, единственным примером параллельного расположения пар гусениц является экспериментальный танк Об.279 [6. М.В Павлов, И.В. Павлов. Отечественные бронированные машины 1945-1965 гг.Танк «Объект 279; URL: https://russian7.ru/post/vpervye-za-60-let-v-kubinke-zaveli-sovet/].
Известна монокорпусная гусеничная машина с механизмом кинематического поворота (2021 г.) [7. RU 208 727 МПК51 B62D 55/065, 11.01.2022]).
Она предназначена для перевозки крупногабаритных грузов большой массы в особо тяжелых условиях движения.
Кроме того, разработаны шасси с последовательным расположением двух обводов на борту (такая схема иногда называется «гусеничным движителем с расщепленным обводом»). По такой схеме была выполнена ходовая часть экспериментального танка Об.490.
Данный принцип использован при создании демонстратора GSD LuWa (der Gesamtsystemdemonstrator für einen zukünftigen Luftbeweglichen Waffenträger), рис. 1 [8. Marco Klöckner und Ulrich Schael (2021). Gesamtsystem demonstrator für einen zukünftigen Luftbeweglichen Waffenträger. https://soldat.-und-technik.de/2021/08/mobilitaet/ 28007/gesamt systemdemonstrator-fuer-einen-zukuenftigen-luftbeweglichen-waffentraeger/ (Дата обращения: 24.03.2022)].
Указанный демонстратор представляется наиболее близким аналогом заявляемого изобретения по назначению и устройству, принят за прототип и характеризуется следующей совокупностью существенных конструктивных признаков (как устройство), общих с заявляемым гусеничным шасси:
наличие силовой установки и трансмиссии (электромеханической), входной вал которой связан с выходным валом силовой установки (двигателем внутреннего сгорания - ДВС), выходные валы - с четырьмя ведущими колесами гусеничного движителя, при этом трансмиссия включает в себя устройство управления скоростью шасси и направлением его движения, а также четыре остановочных тормоза и четыре бортовых редуктора.
Шасси-прототип разрабатывается для военного применения, как перспективная замена боевых десантных машин Wiesel 1,2. Учитывая, что представлен именно демонстратор, нет достаточных оснований для обсуждения защищенности машины и особенностей боевого применения. Но некоторые особенности движителя и принципы построения трансмиссии уже обозначены в достаточной мере. В качестве основного источника энергии рассматривается дизельный двигатель, привод ведущих колес осуществляется от индивидуальных тяговых электродвигателей (ТЭД). Ведущие колеса «расщепленного обвода» расположены в носовой и кормовой частях корпуса машины.
Представляется, что перечисленные решения должны повлечь следующие негативные последствия, которые в принципе можно предотвратить.
Во-первых, использованная схема последовательной гибридной силовой установки (ГСУ) с индивидуальными ТЭД ведет к необходимости завышать мощность примерно на 15% и, следовательно, массогабаритные характеристики ТЭД. Принцип параллельной гибридной электромеханической трансмиссии обеспечил бы лучшее сочетание ТТХ [9. Выбор схемного варианта построения трансмиссий военных машин гибридной силовой установкой / Р.Ю. Добрецов и др. // Сборник статей научно-практической конференции «Разработка и использование электрических трансмиссий для образцов вооружения и военной техники (ОАО «ВНИИТрансмаш»), 20 октября 2016 г.». - Издание ОАО «ВНИИТрансмаш», Санкт-Петербург, 2016. - 169 с. - С. 87-100].
Во-вторых, при преодолении подъема (а для машин военного назначения характерно требование возможности движения на подъем под углом 30-32°), можно ожидать, что доли сцепного веса, приходящейся на передние обводы, будет недостаточно, чтобы реализовать силу тяги, развиваемую ТЭД (гусеницы будут пробуксовывать). Кормовые обводы, наоборот, окажутся перегружены и кормовые ТЭД будут работать в более тяжелых условиях. В случае действия на машину внешней силы (например, буксировка прицепа) ситуация может усугубиться - эпюра нормальных давлений под передним обводом может стать треугольной и распространяться не на всю длину опорной поверхности, что может привести к росту сопротивления движению [10. Эффективность использования опорной поверхности гусеничного движителя при передаче нормальных нагрузок / Ю.В. Галышев, Р.Ю. Добрецов // Научно-технические ведомости СПбГПУ. Сер.: Наука и образование. - 2013. - №3. - С. 272-278]. Поэтому в позднем варианте Об. 490 обводы были неравной длины: четыре катка сзади и два - спереди. Также уменьшался урон при повреждении передних обводов при минном подрыве.
В-третьих, при прямолинейном движении машины, вследствие неустойчивости траков при перекатывании по ним опорных катков, возникают колебания траков, что провоцирует вибрации, затрудняющие работу стабилизатора вооружения [11. Soldat und Technik (1982), N6. S. 488-497], сопровождается увеличением энергозатрат на движение [12. Добрецов Р.Ю. Особенности работы гусеничного движителя в области малых удельных сил тяги // Тракторы и сельскохозяйственные машины - 2009. - №6 - С. 25-31]. В диапазоне значений удельной силы тяги 0,10…0,12 следствием является юз траков [13. Мазур А.И., Крюков В.В., Фадеев И.Ф. Механизм взаимодействия гусениц с грунтом // ВБТ, 1983, №3]. Для «расщепленного обвода» это может привести к тому, что гусеницы одного борта будут проходить разные пути и возникнет либо проскальзывание одного из обводов, либо перегрузка ТЭД. Улучшить условия работы ТЭД можно, установив замкнутую систему управления, позволяющую согласовывать частоты вращения всех ТЭД, но это не решает вопроса увеличения сопротивления движению.
В-четвертых, рекуперация возможна, но перегружаются двигатели и коммутаторы забегающего борта. Мощность рекуперации желательно передавать на забегающий борт по механической ветви. Энергозатраты на поворот увеличиваются [14. Лозин А.В., Добрецов Р.Ю. Гусеничный обвод с двумя ведущими колесами. Актуальные проблемы защиты и безопасности: Труды XXII Всероссийской научно-практической конференции РАРАН (1-4 апреля 2019 г.). Издание ФГБУ «Российской академии ракетных и артиллерийских наук». Москва - 2019. Том 3. «Бронетанковое вооружение и техника», 232 с. - С. 64-73].
Таким образом, все перечисленные аналоги, включая прототип, несмотря на их положительные качества, тем ни менее, далеки от совершенства в части рационального распределения мощности по ведущим колесам в широком спектре эксплуатационных условий, характерных для ТС рассматриваемого назначения.
Прототип, как и др. аналоги, имеет недостаточно высокие ТТХ / ТЭХ.
Проблема (задача), на решение которой направлено заявляемое изобретение, заключается в устранении указанных недостатков (с учетом упомянутых аналогов из числа МРМ) и в улучшении ТТХ (в приложении к шасси военных и специальных ТС) или ТЭХ (в приложении к шасси гражданских ТС) за счет относительно простого конструктивно и оригинального обеспечения возможности перераспределять, в достаточно широком диапазоне соотношения, крутящий момент между ведущими колесами четырехгусеничного шасси.
Решение поставленной задачи достигается тем, что в четырехгусеничном шасси, содержащем силовую установку и трансмиссию, входной вал которой связан с выходным валом силовой установки, выходные валы - с четырьмя ведущими колесами гусеничного движителя, и включающую в себя устройство передач и поворота с фрикционными и тормозами управления, четыре остановочных тормоза и четыре бортовых редуктора, согласно заявляемому изобретению, силовая установка выполнена гибридной, с ДВС и электродвигателем или обратимой электрической машиной, устройство изменения скорости и направления движения выполнено в виде механического механизма передач и поворота, конкретно - в виде последовательно связанных межосевого управляемого шестеренного механизма распределения мощности МРМ0 и двух одинаковых межбортовых управляемых шестеренных механизмов распределения мощности МРМ1, а МРМ0 состоит из центрального планетарного ряда с кинематическим параметром k0=2 и функцией простого дифференциала и двух боковых планетарных рядов с одинаковыми кинематическими параметрами k1, при этом центральный ряд выполнен со сдвоенным эпициклом, входное звено механизма МРМ0 объединяет эпицикл центрального ряда, солнечные шестерни крайних рядов и, через фрикцион С0, водила центрального и первого бокового рядов с выходным звеном x1 МРМ0, солнечная шестерня центрального ряда объединена с водилом второго бокового ряда с выходным звеном х2 МРМ0, а эпициклы боковых рядов снабжены тормозами T1 и Т2 соответственно.
Решение поставленной задачи достигается также за счет дополнительной конструктивной совокупности конструктивных признаков (при сформулированной выше основной совокупности признаков):
каждый межбортовой управляемый шестеренный механизм распределения мощности МРМ1 выполнен с входным звеном 0*, выходными звеньями х*1 и х*2, тремя центральными и одним периферийным планетарными рядами, соответственно с кинематическими параметрами k*0, k3 и k4 и k0=2, при этом входное звено 0* связано с солнечной шестерней первого центрального ряда МРМ1 и, через фрикцион С0* и в параллель, с тормозом Т0* и через зубчатую пару и эпицикл периферийного ряда, водило первого центрального ряда замкнуто на картер МРМ1, эпициклы первого и второго центральных рядов объединены, водила второго и третьего центральных рядов объединены и снабжены тормозом Т3, эпицикл третьего центрального ряда снабжен тормозом Т4, а солнечные шестерни второго и третьего центральных рядов также объединены и связаны через зубчатую передачу со вторым выходным звеном х*2 МРМ1 (это позволяет получить рациональное устройство - в котором достигнуты все желаемые характеристики трансмиссии и шасси ТС в целом, причем в приемлемых суммарных массогабаритных «рамках»).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Четкое разграничение ограничительной и отличительной частей приведенных совокупностей существенных признаков, отражающее результаты сравнительного анализа заявляемого устройства с прототипом, соотносятся с мировым уровнем новизны технического решения. Мировой уровень новизны - первый из триады признаков (критериев) изобретения.
Далее, совокупность отличительных существенных признаков заявляемого устройства не является простой суммой известных технических результатов применения порознь известных компонентов устройства. Имеет место «сверхэффект» (в патентоведческом значении этого термина), который не был очевидным для специалиста из достигнутого уровня техники (разумеется, до рассмотрения заявляемого технического решения). С целым спектром дополнительных технико-эксплуатационных возможностей. Это убедительно демонстрирует изобретательский уровень разработки как второй из триады квалификационных признаков изобретения.
Третий квалификационный признак, - промышленная применимость, - также неоспорим и вытекает, прежде всего, из того же накопленного опыта проектирования, производства и эксплуатации (практического использования) двух- и трехстепенных планетарных зубчатых механизмов, фрикционных элементов и систем управления трансмиссиями и их составными частями.
Заявляемое устройство четырехгусеничного шасси пояснено на чертежах:
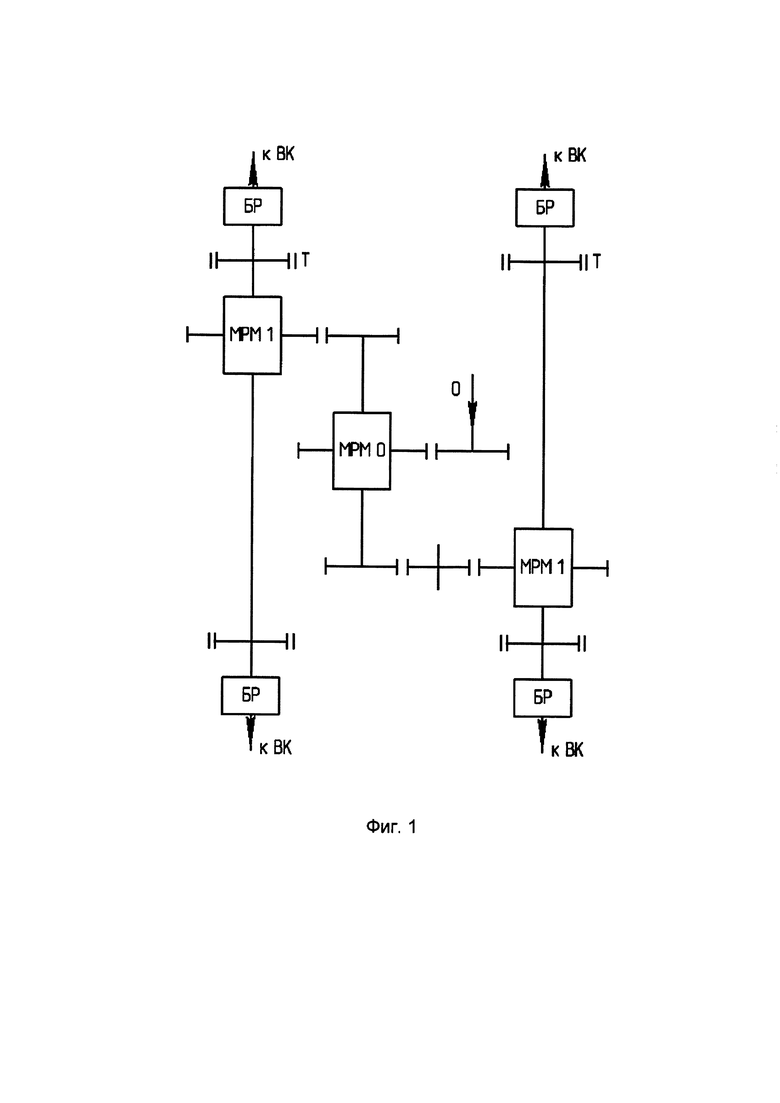
на фиг. 1 показана упрощенная кинематическая схема трансмиссии четырехгусеничного шасси, где 0 - входное звено (подвод мощности от гибридной силовой установки); МРМ0 - межосевой управляемый шестеренный механизм распределения мощности; МРМ1 - межбортовой управляемый шестеренный механизм распределения мощности (функционально заменяет механизм поворота, 2 шт.); Т - остановочный тормоз борта; БР - бортовой редуктор; ВК - ведущее колесо;
на фиг. 2 - упрощенная кинематическая схема межосевого управляемого шестеренного механизма распределения мощности, где 0, x1 и x2 - входное и выходные звенья; k0=2 и k1 - кинематические параметры центрального и боковых планетарных механизмов; С0, T1 и T2 - элементы управления - соответственно фрикционная муфта (фрикцион), тормоза бортов;
на фиг. 3 - упрощенная кинематическая схема межбортового управляемого шестеренного механизма распределения мощности, где 0*, х1* и х2* - входное и выходные звенья; k0=2, k*0, k3 и k4 - кинематические параметры планетарных механизмов; С0*, T0*, T3 и T4 - элементы управления - соответственно фрикционная муфта (фрикцион) и тормоза.
Четырехгусеничное шасси содержит (см. фиг. 1) силовую установку и трансмиссию, входной вал которой связан с выходным валом силовой установки, выходные валы - с четырьмя ведущими колесами (ведущими звездочками) гусеничного движителя, и включающую в себя устройство изменения скорости шасси и направления его движения, четыре рабочих тормоза и четыре бортовых редуктора.
Силовая установка выполнена гибридной (либо последовательный, либо параллельный гибрид) - ГСУ, с ДВС и электродвигателем или (наиболее предпочтительно - см. о использовании рекуперации энергии) обратимой электрической машиной (ОЭМ).
Устройство изменения скорости шасси и направления его движения представляет собой механическое устройство - механизм передач и поворота (МПП, согласно существующей классификации). МПП выполнен в виде последовательно связанных межосевого управляемого шестеренного механизма распределения мощности МРМ0 и двух одинаковых межбортовых управляемых шестеренных механизмов распределения мощности МРМ1.
МРМ0 состоит (см. фиг. 2) из центрального планетарного ряда с кинематическим параметром k0=2 и функцией простого дифференциала и двух боковых планетарных рядов с одинаковыми кинематическими параметрами k1.
При этом центральный ряд выполнен со сдвоенным эпициклом, входное звено механизма МРМ0 объединяет эпицикл центрального ряда, солнечные шестерни крайних рядов и, через фрикцион (дисковая фрикционная муфта) С0, водила центрального и первого бокового рядов с выходным звеном x1 МРМ0, солнечная шестерня центрального ряда объединена с водилом второго бокового ряда с выходным звеном х2 МРМ0, а эпициклы боковых рядов снабжены тормозами T1 и Т2 соответственно.
Возможны различные варианты построения схем МРМ1.
Каждый межбортовой управляемый шестеренный механизм распределения мощности МРМ1 (см. фиг. 3) может быть (рекомендуемый частный пример - см. фиг. 3) выполнен с входным звеном 0*, выходными звеньями х1* и х2*, периферийным и тремя центральными планетарными рядами, соответственно с кинематическими параметрами k0=2, k*0, k3 и k4, при этом входное звено 0* связано с солнечной шестерней первого центрального ряда МРМ1 и, через фрикцион С0* и в параллель, с тормозом Т0* и через зубчатую пару и эпицикл периферийного ряда, водило первого центрального ряда замкнуто на картер МРМ1, эпициклы первого и второго центральных рядов объединены, водила второго и третьего центральных рядов объединены и снабжены тормозом Т3, эпицикл третьего центрального ряда снабжен тормозом Т4, а солнечные шестерни второго и третьего центральных рядов также объединены и связаны через зубчатую передачу со вторым выходным звеном x2* МРМ1.
Возможны другие кинематические схемы и конструкции четырехгусеничного шасси в рамках заявляемых основной и дополнительных совокупностей существенных признаков.
Заявляемое устройство работает следующим образом.
Мощность поступает (см. фиг. 1) на входной вал 0 от ГСУ последовательного или параллельного типа (параллельный тип предпочтительнее хотя бы из соображений возможности обеспечения движения при отказавшем ТЭД или дизеле). Подробно режимы работы и особенности таких ГСУ рассмотрены в статье [9, С. 87-100].
Напомним, что межосевой управляемый шестеренный механизм распределения мощности МРМ0 (см. фиг. 2) составлен из трех планетарных рядов. Центральный ряд, имеющий кинематический параметр k0=2, выполняет функции простого дифференциала. Боковые планетарные ряды имеют одинаковые кинематические параметры k1. Значения этих параметров вычисляют при проектировании, исходя из необходимого значения соотношения крутящих моментов на выходных звеньях x1 и x2.
МРМ0 обеспечивает четыре режима работы.
0.1. Режим простого (симметричного) дифференциала. Все элементы управления отключены. Моменты на выходных звеньях равны половине момента на входном звене. Угловые скорости выходных звеньев могут быть неравны друг другу, то есть, передние и кормовые гусеницы могут проходить разные пути без появления продольной циркуляции мощности.
0.2. Режим блокировки. Включен фрикцион С0. Крутящие моменты на выходных звеньях равны крутящему моменту на ведущем звене. Режим может быть использован в тяжелых дорожных условиях.
0.3. Режим несимметричного дифференциала. Включен тормоз T1. Дополнительный крутящий момент снимается с входного звена и передается на выходной вал x1. МРМ0 работает, как несимметричный дифференциал. Сам принцип подачи дополнительной мощности на одну из полуосей используется, например, в межколесных управляемом дифференциале ZF Vector Drive [15. Granzow, С.ect. (2008). ZF vector drive® - From the technical gear concept to improved vehicle performance of driving dynamics. S. 537-550] и других MPM. Режим может использоваться при преодолении крутых подъемов или спусков, буксировки и т.п.
0.4. Режим несимметричного дифференциала. Включен тормоз T2. МРМ0 работает аналогично третьему режиму, но дополнительный момент подается на выходное звено x2.
Упрощенный вариант МРМ предложен для трансмиссии грузового автомобиля в работе [16. Еремин Е.С., Добрецов Р.Ю. Управляемый межосевой механизм распределения мощности. Модернизация и научные исследования в транспортном комплексе: материалы международной научно-практической конференции - Пермь: Изд-во ПНИПУ, 2021. - 216 с. - С. 34-37].
С выходных валов межосевого дифференциала МРМ0 мощность передается на межбортовые управляемые шестеренные механизмы распределения мощности - МРМ1, функционально заменяющие механизм поворота. Принцип управления распределением мощности МРМ1 близок к примененному в дифференциале AYC [17. Y. Ushiroda ect. (2003) Development of Super AYC. «Technical review», №15. 73-76].
Рассмотрим теперь особенности работы МРМ1 по представленному частному примеру выполнения (см. фиг. 3).
С входного звена 0* (после МРМ0) мощность передается на редукторную часть механизма, представленную тремя планетарными рядами. Механизм реализует следующие режимы работы.
1.1. Режим симметричного дифференциала. Включен фрикцион С0*, остальные элементы управления отключены. Прямолинейное движение ТС неустойчиво.
1.2. Режим поворота с фиксированным радиусом. Включен фрикцион С0* и один из тормозов - Т3 или T4. В рассматриваемом примере заданы значения кинематических параметров k*0=2,00; k3=(- 2,05) и k4=2,38, что позволяет осуществлять поворот с относительным радиусом 2,78. Возможна рекуперация мощности.
1.3. Режим поворота с промежуточным радиусом осуществляется при полном включении фрикциона С0* и пробуксовке используемого тормоза Т3 или Т4. Возможно использование управляемого буксования пакета дисков тормоза [18. Замкнутые системы управления поворотом гусеничных машин = Closed-loop control system for tracked vehicle steering / Ю.В. Галышев [и др.] // Научно-технические ведомости СПбГПУ. Сер.: Наука и образование / Министерство образования и науки РФ; Санкт-Петербургский гос. политехн. ун-т. - СПб., 2014. - №3 (202). - С. 201-208]. Возможна рекуперация мощности.
1.4. Режим поворота с нулевым радиусом. Включен тормоз Т0* и один из тормозов T3 или T4. Угловые скорости выходных валов равны по модулю и противоположны по знаку.
Для обеспечения устойчивости прямолинейного движения достаточно предусмотреть блокировку дифференциала. Тормоз Т0* может при наличии механического привода использоваться как стояночный.
Рабочие тормоза вынесены в отдельные узлы.
Бортовые редукторы предлагается выполнить вальными, что позволит обеспечить нужное расположение осей ведущих колес.
В принципе, возможно применение изобретения и на колесных машинах с бортовым способом поворота.
На основании изложенного в описании, можно резюмировать, что заявляемое устройство, независимо от выбора того или иного частного схемного и конструктивного решения, позволяет устранить отмеченные выше недостатки прототипа и улучшить ТТХ / ТЭХ за счет относительно простого конструктивно и оригинального обеспечения возможности перераспределять, в достаточно широком диапазоне соотношения, крутящий момент между ведущими колесами движителя благодаря управляемому МРМ, способному функционально заменить механизм поворота ТС. А также за счет возможности обеспечения поворота ТС с нулевым радиусом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| Вально-планетарная гибридная трансмиссия | 2022 |
|
RU2805899C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2634062C1 |
| Механизм распределения мощности в трансмиссии автомобиля | 2014 |
|
RU2618830C2 |
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТРАНСПОРТНОЙ МАШИНЫ С БОРТОВЫМ СПОСОБОМ ПОВОРОТА | 2015 |
|
RU2599855C1 |
| Гусеничная машина | 2019 |
|
RU2711105C1 |

Изобретение относится к гусеничным машинам с распределением мощности между ведущими колесами. Четырехгусеничное шасси содержит силовую установку и трансмиссию, входной вал которой связан с выходным валом силовой установки, выходные валы - с четырьмя ведущими колесами гусеничного движителя и включающую в себя устройство изменения скорости и направления движения, четыре рабочих тормоза и четыре бортовых редуктора. Силовая установка выполнена гибридной с двигателем внутреннего сгорания и электродвигателем или обратимой электрической машиной. Устройство изменения скорости и направления движения шасси выполнено в виде последовательно связанных межосевого управляемого шестеренного механизма распределения мощности МРМ0 и двух одинаковых межбортовых управляемых шестеренных механизмов распределения мощности МРМ1. МРМ0 состоит из центрального планетарного ряда с кинематическим параметром k0=2 и функцией простого дифференциала и двух боковых планетарных рядов с одинаковыми кинематическими параметрами k1. При этом центральный ряд выполнен со сдвоенным эпициклом, входное звено механизма МРМ0 объединяет эпицикл центрального ряда, солнечные шестерни крайних рядов и, через фрикцион С0, водила центрального и первого бокового рядов с выходным звеном x1 МРМ0, солнечная шестерня центрального ряда объединена с водилом второго бокового ряда с выходным звеном x2 МРМ0, а эпициклы боковых рядов снабжены тормозами T1 и Т2 соответственно. Предложена также дополнительная совокупность признаков устройства в части МРМ1. Достигается повышение тактико-технических или технико-эксплуатационных характеристик транспортного средства. 1 з.п. ф-лы, 3 ил.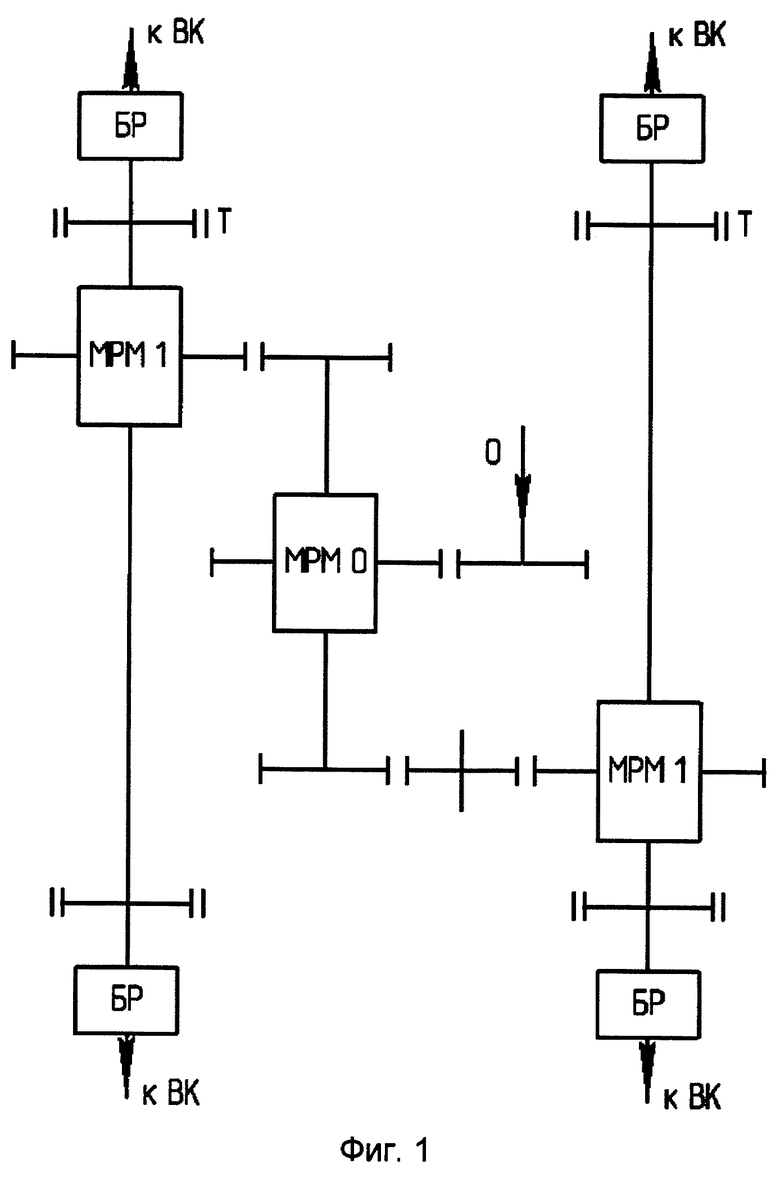
1. Четырехгусеничное шасси, содержащее силовую установку и трансмиссию, входной вал которой связан с выходным валом силовой установки, выходные валы - с четырьмя ведущими колесами гусеничного движителя, и включающую в себя устройство изменения скорости и направления движения, четыре рабочих тормоза и четыре бортовых редуктора, отличающееся тем, что силовая установка выполнена гибридной, с двигателем внутреннего сгорания и электродвигателем или обратимой электрической машиной, устройство изменения скорости и направления движения выполнено в виде механического механизма передач и поворота, конкретно - последовательно связанных межосевого управляемого шестеренного механизма распределения мощности МРМ0 и двух одинаковых межбортовых управляемых шестеренных механизмов распределения мощности МРМ1, а МРМ0 состоит из центрального планетарного ряда с кинематическим параметром и функцией простого дифференциала и двух боковых планетарных рядов с одинаковыми кинематическими параметрами, при этом центральный ряд выполнен со сдвоенным эпициклом, входное звено механизма МРМ0 объединяет эпицикл центрального ряда, солнечные шестерни крайних рядов и, через фрикцион, водила центрального и первого бокового рядов с выходным звеном x1 МРМ0, солнечная шестерня центрального ряда объединена с водилом второго бокового ряда с выходным звеном МРМ0, а эпициклы боковых рядов снабжены тормозами T1 и Т2 соответственно.
2. Шасси по п. 1, отличающийся тем, что каждый межбортовой управляемый шестеренный механизм распределения мощности МРМ1 выполнен с входным звеном 0*, выходными звеньями x*1 и x*2, тремя центральными и одним периферийным планетарными рядами, соответственно с кинематическими параметрами k*0, k3, k4 и k0 = 2, при этом входное звено 0* связано с солнечной шестерней первого центрального ряда МРМ1 и, через фрикцион С0* и в параллель, с тормозом Т0* и через зубчатую пару и эпицикл периферийного ряда, водило первого центрального ряда замкнуто на картер МРМ1, эпициклы первого и второго центральных рядов объединены, водила второго и третьего центральных рядов объединены и снабжены тормозом Т3, эпицикл третьего центрального ряда снабжен тормозом Т4, а солнечные шестерни второго и третьего центральных рядов также объединены и связаны через зубчатую передачу со вторым выходным звеном x*2 МРМ1.
| Гусеничная машина | 2019 |
|
RU2710511C1 |
| 0 |
|
SU208727A1 | |
| СПОСОБ СТЕРИЛИЗАЦИИ КОМПОТА ИЗ ДЫНИ | 2012 |
|
RU2492761C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КРЫШЕК ДЛЯ СТЕКЛЯННЫХ БУТЫЛОК | 2001 |
|
RU2220890C2 |
