ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области рекуперации энергии торможения транспортных машин, таких как гибридные силовые установки с ДВС и электромобили, а также к устройствам для осуществления указанной технологии.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известны способ и устройство управления рекуперации энергии машины с помощью вариатора скоростей, соединяющего маховик с трансмиссией, которые описаны в книге [1] (Гулиа Н.В. "Инерция" - М.: Наука, 1982. 152 с.). В работе [2] (Flyweel drave system "Garratt corporation" (United States patent 4,233,858 Nov.18. 1980 PCT/US 019778 WO 2008/033378 App. №754, 597 Dec.27, 1976 Int cl3 F16h 37/06)) приведен аналог устройства управления рекуперации энергии машины
Известный способ управления рекуперации энергии машины заключается в изменении передаточного отношения вариатора Пвар, находящегося в кинематической цепи между трансмиссией машины и маховиком. Однако оптимальная зависимость изменения передаточного отношения вариатора в работах [1, 2] не приводится. Экспериментальные исследования были проведены автором [1] на ленточном вариаторе с неуправляемым изменением передаточного отношения, зависящего от толщины ленты, что не обеспечивало постоянного суммарного значения кинетической энергии трансмиссии машины и маховика и полную рекуперацию энергии торможения. Поэтому по известному способу оптимальная зависимость изменения передаточного отношения вариатора и полнуя рекуперация невозможна. Совершенствование известный способ управления рекуперации энергии автором [1] не проводилось.
Известное устройство управления рекуперации энергии машины принципиально не реализует и не поддерживает постоянного суммарного значения кинетической энергии трансмиссии машины и маховика так как в нем происходит частичное преобразование части механической энергии в в электрическую и передачу ей в электрический аккумулятор. Известное устройство управления рекуперации энергии машины принципиально не реализует полную рекуперацию энергии торможения, так как в нем невозможно осуществить оптимальное изменение передаточного отношения вариатора без создания системы автоматического управления на принципах самовыравнивания кинетической энергии трансмиссии машины и маховика, которое обеспечивало бы постоянного суммарного значения кинетической энергии трансмиссии машины и маховика.
Схема известного устройства управления рекуперации энергии машины фирмы "Garratt corporation" (США) [1, 2] включает тяговый электродвигатель и трансмиссию, соединенные между собой зубчатой передачей с постоянным передаточным отношением с одной степенью подвижности, а также управляющую обратимую электрическую машину, маховик и планетарный дифференциал с двумя степенями подвижности, состоящий из двух центральных зубчатых колес (из которых одно центральное зубчатое колесо с внутренним зубом), а другое центральное зубчатое колесо с внешним зубом называется центральной шестерней, а также из водила и сателлита, расположенного на водиле и находящегося в зацеплении с двумя центральными зубчатыми колесами, причем маховик соединен с центральной шестерней. При таком соединении звеньев невозможно создание системы автоматического управления на принципах самовыравнивания кинетической энергии трансмиссии машины и маховика, которое обеспечивало бы постоянного суммарного значения кинетической энергии трансмиссии машины и маховика. Управление потоком энергии в маховик и обратно осуществляется через планетарный дифференциал с двумя степенями подвижности w=2, состоящий из двух центральных зубчатых колес (из которых одно центральное зубчатое колесо с внутренним зубом), а другое центральное зубчатое колесо с внешним зубом называется центральной шестерней, а также из водила и сателлита, расположенного на водиле и находящегося в зацеплении с двумя центральными зубчатыми колесами, причем маховик соединен с центральной шестерней. Мощный электрический аккумулятор служит для аккумулирования энергии при торможении машины и для питания тягового электродвигателя при разгоне и при установившемся движении. Причем в маховике запасается только часть энергии торможения, а энергия из электрического аккумулятора расходуется как на преодоление сил полезного сопротивления движению так и на управление планетарным дифференциалом с помощью управляющей обратимой электрической машиной. Для управления известного устройства рекуперации энергии машины используется механизм бесступенчатого плавного изменения, включающее тяговый электродвигатель и трансмиссию, соединенные между собой зубчатой передачей с постоянным передаточным отношением с одной степенью подвижности, включающее также управляющую обратимую электрическую машину, маховик и планетарный дифференциал с двумя степенями подвижности w=2, состоящий из двух центральных зубчатых колес (из которых одно центральное зубчатое колесо с внутренним зубом), а другое центральное зубчатое колесо с внешним зубом называется центральной шестерней, а также из водила и сателлита, расположенного на водиле и находящегося в зацеплении с двумя центральными зубчатыми колесами, причем маховик соединен с центральной шестерней. Однако, оптимальное изменение передаточного отношения вариатора в работах [1, 2] не приводится. Экспериментальные исследования были проведены автором [1], однако в них не обеспечивалось управления на принципах самовыравнивания кинетической энергии трансмиссии машины и маховика, которое обеспечивало бы постоянного суммарного значения кинетической энергии трансмиссии машины и маховика. Таким образом при известном соединении звеньев [1, 2] невозможно создание системы автоматического управления на принципах самовыравнивания кинетической энергии трансмиссии машины и маховика, которое обеспечивало бы постоянного суммарного значения кинетической энергии трансмиссии машины и маховика.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание такого устройства, которое обеспечило бы полную рекуперацию энергии торможения путем автоматической работы на любых режимах движения машины. Поставленная цель достигается тем, что обмен кинетической энергии между маховиком и трансмиссией машины осуществляют изменением передаточного отношения планетарного дифференциала, который соединяет трансмиссию, электродвигатель и маховик. Изменение передаточного отношения кинематической цепи планетарного дифференциала, которая соединяет трансмиссию и маховик осуществляется посредством использования предлагаемого способа сохранения постоянного суммарного значения кинетической энергии трансмиссии машины и маховика.
Для этого необходимо, чтобы махховик мог полностью аккумулировать кинетическую энергию трансмиссии машины. Это условие выполняется при определенном необходимом соотношении приведенных моментов инерции машины и маховика, которое находится из уравнения кинетической энергии и зависит от максимальных значений скоростей вращения 1 маховика (ω1)max и звена приведения 2 трансмиссии (ω2)max
где J1 и J2 - приведенные моменты инерции маховика и машины;
Поиск оптимального закона изменения передаточной функции вариатора, необходимого для исключения кинетических потерь энергии при торможении, производится по уравнению сохранения энергии машины с маховичным аккумулятором с учетом вышеизложенного необходимого соотношения моментов инерции по уравнению сохранения энергии машины. Выражение оптимального закона изменения передаточной функции вариатора в зависимости от отношения текущей ωтр и максимальной (сортах скоростей звена приведения трансмиссии машины для двухмассной модели машины имеет вид

Известен способ управления рекуперации энергии машины, заключающийся в изменении передаточного отношения вариатора Uвар в кинематической цепи между трансмиссией машины и маховиком.
Предлагается способ управления рекуперации энергии машины, отличающийся тем, что обеспечивается постоянное суммарное значение кинетической энергии трансмиссии машины и маховика изменением передаточного отношения вариатора Uвар по зависимости, которая связывает скорость вращения трансмиссии 
Uвар={[(ωмахов)max/ωтр]2-1}1/2
1. Способ управления рекуперации энергии машины, заключающийся в изменении передаточного отношения вариатора Uвар в кинематической цепи между трансмиссией машины и маховиком, отличающийся тем, что обеспечивается постоянное суммарное значение кинетической энергии трансмиссии машины и маховика изменением передаточного отношения вариатора Uвар по зависимости, которая связывает скорость вращения трансмиссии ωтр сопровождается и скорость вращения маховика ωмахов
Uвар={[(ωмахов)max/(ωтр]2-1}1/2
Существенные признаки предлагаемого способа, которые совпадают с признаками аналога, заключаются в том, что оба способа управления рекуперации энергии машины заключаются в изменении передаточного отношения вариатора Uвар в кинематической цепи между трансмиссией машины и маховиком.
Существенные отличия предлагаемого способа, которые не совпадают с признаками аналога, заключаются в том, что им обеспечивается постоянное суммарное значение кинетической энергии трансмиссии машины и маховика изменением передаточного отношения вариатора Uвар по зависимости, которая связывает скорость вращения трансмиссии ωтр сопровождается и скорость вращения маховика ωмахов
Uвар={[(ωмахов)max/(ωтр]2-1}1/2
Дополнительные отличия предлагаемого способа, которые не совпадают с признаками аналога, заключаются в том, что скорости вращения входных и выходных звеньев вариатора в кинематической цепи между трансмиссией машины и маховиком имеют противоположные направления. Это отличие является существенным, так как противоположные направления скорости вращения входных и выходных звеньев вариатора в кинематической цепи между трансмиссией машины и маховиком позволяют поддерживать постоянное суммарное значение кинетической энергии трансмиссии машины и маховика.
Известно устройство управления рекуперации энергии машины, включающее тяговый электродвигатель и трансмиссию, соединенные между собой зубчатой передачей с постоянным передаточным отношением с одной степенью подвижности, включающее также управляющую обратимую электрическую машину, маховик и планетарный дифференциал с двумя степенями подвижности, состоящий из двух центральных зубчатых колес (из которых одно центральное зубчатое колесо с внутренним зубом), а другое центральное зубчатое колесо с внешним зубом называется центральной шестерней, а также из водила и сателлита, расположенного на водиле и находящегося в зацеплении с двумя центральными зубчатыми колесами, причем маховик соединен с центральной шестерней.
Предлагается устройство управления рекуперации энергии машины, отличающееся тем, что снабжено дополнительно зубчатой передачей, соединяющей центральную шестерню планетарного дифференциала с маховиком, трансмиссия соединена с центральным зубчатым колесом, а водило соединено с управляющей электрической машиной. Такое соединение планетарного дифференциала с маховиком обеспечивает снижении потерь кинетической энергии при торможении путем сохранения постоянного значения кинетической энергии трансмиссии машины и маховика, что в свою очередь возможно только при автоматическом измерении текущей скорости трансмиссии машины так как планетарный дифференциал образует механический регулятор прямого действия, работающий по принципу Понселе [4].
Устройство управления рекуперации энергии машины, включающее тяговый электродвигатель и трансмиссию, соединенные между собой зубчатой передачей с постоянным передаточным отношением с одной степенью подвижности, включающее также управляющую обратимую электрическую машину, маховик и планетарный дифференциал с двумя степенями подвижности, состоящий из двух центральных зубчатых колес (из которых одно центральное зубчатое колесо с внутренним зубом), а другое центральное зубчатое колесо с внешним зубом называется центральной шестерней, а также из водила и сателлита, расположенного на водиле и находящегося в зацеплении с двумя центральными зубчатыми колесами, причем маховик соединен с центральной шестерней, отличающееся тем, что снабжено дополнительно зубчатой передачей, соединяющей центральную шестерню планетарного дифференциала с маховиком, трансмиссия соединена с центральным зубчатым колесом, а водило соединено с управляющей электрической машиной.
Существенное отличие предлагаемого устройства от аналога заключаются в том, что оно снабжено дополнительно зубчатой передачей, соединяющей центральную шестерню планетарного дифференциала с маховиком, трансмиссия соединена с центральным зубчатым колесом, а водило соединено с управляющей электрической машиной.
Дополнительное отличие предлагаемого устройства от аналога заключаются в том, что оно снабжено дополнительно управляемым сцеплением, с помощью которого маховик соединен с центральной шестерней планетарного дифференциала, обеспечивающего при выключении возможность вращения маховика при остановке машины и тягового электродвигателя.
Лучший вариант устройства отличается тем, что предлагаемого устройства от аналога заключаются в том, что оно снабжено дополнительно двумя зубчатыми передачами, соединяющими водило с управляющей обратимой электрической машиной и трансмиссию с центральным зубчатым колесом.
Таким образом предлагаемое устройство отличается от аналога тем, что снабжено дополнительно управляемым сцеплением, с помощью которого маховик соединен с центральной шестерней планетарного дифференциала, обеспечивающего при выключении возможность вращения маховика при остановке машины и тягового электродвигателя и снабжено дополнительно двумя зубчатыми передачами, соединяющими водило с управляющей обратимой электрической машиной и трансмиссию с центральным зубчатым колесом.
Основная совокупность существенных признаков заявляемого устройства, позволяющая реализовать достижение заявленного технического результата, заключается в том, что устройство управления рекуперации энергии машины, снабжено дополнительно зубчатой передачей, соединяющей центральную шестерню планетарного дифференциала с маховиком, трансмиссия соединена с центральным зубчатым колесом, а водило соединено с управляющей электрической машиной, что снабжено дополнительно управляемым сцеплением, с помощью которого маховик соединен с центральной шестерней планетарного дифференциала, обеспечивающего при выключении возможность вращения маховика при остановке машины и тягового электродвигателя и тем, что снабжено дополнительно двумя зубчатыми передачами, соединяющими водило с управляющей обратимой электрической машиной и трансмиссию с центральным зубчатым колесом.
Соединение звеньев планетарного дифференциала выполнено различным образом у известного и предлагаемого устройств. Соединение звеньев в известном устройстве снижает эффективность управления рекуперации энергии и не позволяет обеспечить постоянное суммарное значение кинетической энергии маховика и машины, так происходит одновременное увеличение кинетической энергии всех звеньев дифференциала, маховика и трансмиссии при разгоне и одновременное снижение их кинетической энергии при торможении.
Сравнение свойств заявляемого и известного решений показывает, что у заявляемого решения появляются новые свойства, не совпадающие со свойствами известных решений, и что заявляемое решение обладает существенными отличиями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения поясняется чертежами. На фиг.1 изображена кинематическая схема предлагаемого устройства рекуперации энергии торможения машины: 1 - центральная шестерня (зубчатое колесо с внешним зубом); 2 - сателлит (зубчатое колесо с подвижной осью вращения); 3 - центральное зубчатое колесо (с внутренним зубом); 4 - водило; 5 - планетарный дифференциал; 6 - тяговый электродвигатель; 7 - трансмиссия; 8 - главная передача; 9 - ведущие колеса; 10 - зубчатая передача (тягового электродвигателя); 11 - зубчатая передача (маховика); 12 - маховик; 13 - управляющая обратимая электрическая машина; 14 - зубчатая передача (управляющей обратимой электрической машины); 15 - электрический аккумулятор; 16 - электронное управляющее устройство; 17 - зубчатая передача (трансмиссии); 18 - источник электрической энергии.
Основу устройства составляет планетарный дифференциал 5 с числом степеней свободы, равным 2, который включает механически связанные между собой кинематическими парами общеизвестные элементы [3]: 1 - центральная шестерня (зубчатое колесо с внешним зубом); 2 - сателлит; 3 - центральное зубчатое колесо (с внутренним зубом); 4 - водило, на котором располагается сателлит 2. Центральная шестерня 1 соединена зубчатой передачей 11 с неподвижными осями с маховиком 12. Сателлит 2 расположен на водиле 4 и зацепляется с центральной шестерней и центральным зубчатым колесом; (с внутренним зубом). Водило 4 соединено зубчатой передачей 14 с управляющей обратимой электрической машиной 6. Центральное зубчатое колесо 3 соединено зубчатой передачей 17 с трансмиссией 7, которая соединена главной передачей 8 с ведущими колесами 9. Тяговый электродвигатель 6 соединен с трансмиссией зубчатой передачей 10.
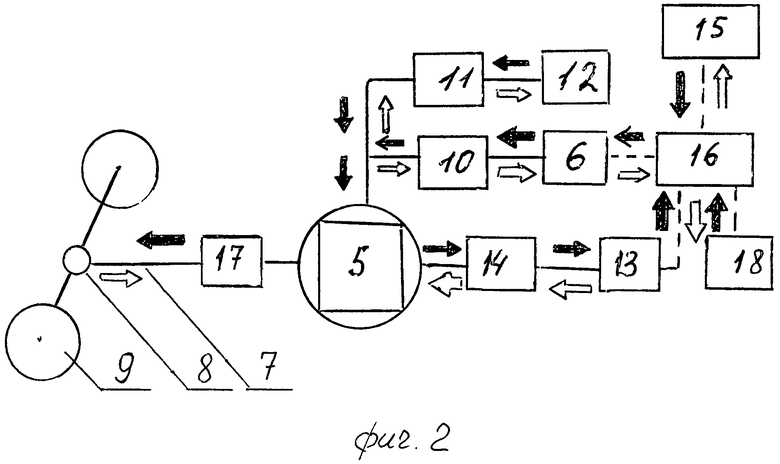
Структурная схема устройства управления рекуперации энергии машины изображена на фиг.2. Электронное управляющее устройство 16 соединяет электрическими цепями электрический аккумулятор 15, управляющую обратимую электрическую машину 13, тяговый электродвигатель 6 и источник электрической энергии 18, в качестве которого может быть использован электрический генератор с приводом от ДВС.
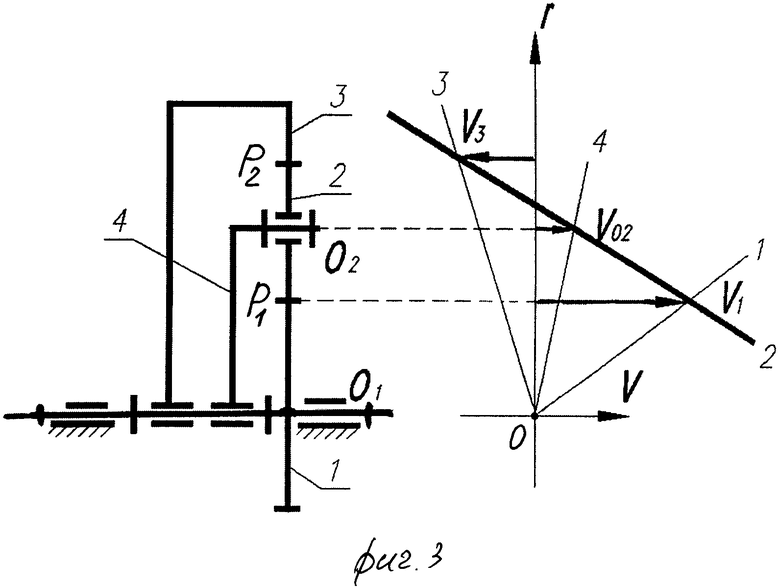
Изменение соединений планетарного дифференциала заявляемого и известного устройств позволяет использовать свойство саморегулирования, которое было невозможно при использовании известного устройства, что является принципиальным отличием для повышения эффективности работы системы управления машины. Это свойство саморегулирования кинетической энергии следует из анализа планов скоростей, представленных на фиг.3.
РАБОТА ПРЕДЛАГАЕМОГО УСТРОЙСТВА
На фиг.3 изображена кинематическая схема планетарного дифференциала с числом степеней свободы, равным 2, и планы скоростей его звеньев: 1 - центральная шестерня; 2 - сателлит; 3 - центральное колесо (с внутренним зубом); 4 - водило. Водило 4 (связанное на фиг.1 с обратимой электрической машиной) вращается вокруг неподвижного центра О1. Центр вращения сателлита О2 имеет линейную скорость VO2. В точках контакта P1 сателлита 2 с центральной шестерней 1 и Р2 центральным зубчатым колесом 3 (с внутренним зубом) скорости их V3 и V1 равны скоростям точек сателлита 2. Линейные скорости V3 и V1 определяют закон распределения скоростей и скорость 2 центра сателлита VO2, связанную со скоростью вращения водила 4.
Изменение скорости V3 с помощью управляющей обратимой электрической машины 13, связанной с электронным управляющим устройством 16 (фиг.2) вызывает изменение скорости V1 и скорости вращения маховика 12. Изменение скорости вращения трансмиссии 7, определяемой скоростью движения машины, вызывает изменение скорости V3 центрального зубчатого колеса 3 и скорости V1 центральной шестерни и связанного с ней маховика 12. Таким образом, воздействия скорости V3, связанной со скоростью движения машины, и скорости VO2 водила 4, связанного с управляющей обратимой электрической машиной 13, вызывает изменение скорости вращения центральной шестерни 1 и связанного с ним маховика 12.
На плане скоростей фиг.3, построенного в системе координат линейная скорость V и радиус точки, угловые скорости звеньев пропорциональны тангенсу наклона лучей [3]. Из плана скоростей следует, что увеличение скорости движения машины и скорости V3 при разгоне и снижение скорости VO2 вызывает снижение скорости V1 и скорости вращения маховика 12. При торможении машины наблюдается обратное явление - снижение скорости движения машины и увеличение скорости VO2, которые вызывают рост скорости V1 и скорости вращения маховика 12. Это взаимодействие тягового электродвигателя 6, определяющего скорость машины, с управляющей обратимой электрической машиной 13 приводит к появлению самовыравнивания кинетической энергии трансмиссии 7 и звеньев планетарного дифференциала 5, связанного с маховиком 12.
Поскольку скорость вращения водила 4 определяется управляющей обратимой электрической машиной 13, связанной с электронным управляющим устройством 16, то разгон или торможение машины определяется им через изменение крутящего момента тягового электродвигателя 6 и управляющей обратимой электрической машины 13. Поддержание постоянного суммарного значения кинетической энергии маховика 12 и трансмиссии 7 машины осуществляется за счет характеристики дифференциала, при которой изменение скорости движения машины вызывает соответствующее изменение скорости вращения маховика 12.
Направление потока энергии при торможении дано на фиг.2 стрелками  , имеющими направление рекуперации механической энергии от ведущих колес 9 машины к маховику 12 и от тягового электродвигателя 6 к управляющей обратимой электрической машине 13. Тяговый электродвигатель 6 работает в режиме электрического генератора, управляющая обратимая электрическая машина 13 работает в режиме электродвигателя, избыток электрической энергии передается в аккумулятор. При торможении происходит подзарядка электрического аккумулятора 15 от тягового электродвигателя 6 и от источника электрической энергии 18.
, имеющими направление рекуперации механической энергии от ведущих колес 9 машины к маховику 12 и от тягового электродвигателя 6 к управляющей обратимой электрической машине 13. Тяговый электродвигатель 6 работает в режиме электрического генератора, управляющая обратимая электрическая машина 13 работает в режиме электродвигателя, избыток электрической энергии передается в аккумулятор. При торможении происходит подзарядка электрического аккумулятора 15 от тягового электродвигателя 6 и от источника электрической энергии 18.
При разгоне наблюдается обратный эффект. Направление потока энергии меняется на обратное и показано на фиг.2 стрелками  , от аккумулятора 15 к тяговому электродвигателю 6 и к ведущим колесам 9 от маховика 12 и от тягового электродвигателя 6 к управляющей обратимой электрической машине 13. Управляющая обратимая электрическая машина 13 работает в режиме электрического генератора.
, от аккумулятора 15 к тяговому электродвигателю 6 и к ведущим колесам 9 от маховика 12 и от тягового электродвигателя 6 к управляющей обратимой электрической машине 13. Управляющая обратимая электрическая машина 13 работает в режиме электрического генератора.
В режиме установившегося движения с постоянной скоростью Машины поток энергии идет от источника электрической энергии 18 и от аккумулятора 15 к тяговому электродвигателю 6 при соответствующем управляющем сигнале от обратимой электрической машины 13, которая работает в режиме электрического генератора. При отсутствии источника электрической энергии 16 питание к тяговому электродвигателю 6 поступает только от аккумулятора 15, который необходимо периодически подзаряжать от внешнего источника питания (не показанного на рисунках). Выбором мощности источника электрической энергии 18, который может быть использован как в режиме установившегося движения, так и при разгоне, можно обеспечить баланс работы аккумулятора без подзарядки от внешнего источника питания.
Из рассмотрения фиг.3 следует, что запас кинетической энергии маховика 12 при снижении его скорости автоматически передается в трансмиссию 7 машины и приводит к увеличению скорости машины при ее разгоне. И, наоборот, запас кинетической энергии маховика 12 автоматически увеличивается при снижении скорости трансмиссии 7 при торможении машины. Работой управляемой обратимой электрической машины 13 в режиме электродвигателя или электрического генератора можно менять процесс обмена кинетической энергии между маховиком 12 и трансмиссией 7 машины для осуществления разгона или торможения. Процесс перекачки энергии из маховика 12 в трансмиссию 7 или в обратном направлении управляется автоматически за счет самовыравниваемой характеристики планетарного дифференциала 5 при выбранном соединении его звеньев с элементами трансмиссии 7 путем настройки крутящего момента управляемой обратимой электрической машины 10 при любом изменении режима работы машины путем поддержания постоянного запаса кинетической энергии подвижных частей машины. Планетарный дифференциал 5 с двумя степенями свободы W=2 образует механический регулятор прямого действия, работающий по принципу Понселе [4].
Лучший вариант устройства
Устройство управления начинает работать после запуска тягового электродвигателя 6 и начала движения машины, приводящего к увеличению скорости трансмиссии 7. Маховик может запасать энергию после первой остановки машины. Необходимо, чтобы при остановке машины и тягового электродвигателя 6 маховик 12 не останавливался и не терял накопленную при торможении кинетическую энергию.
Для этого устройство управления рекуперации энергии машины снабжено дополнительно управляемым сцеплением (не показанном на рисунках в виду его общеизвестности его конструкции), с помощью которого маховик 12 соединяется с центральной шестерней 1 планетарного дифференциала 5. Принудительное выключение управляемого сцепления позволяет сохранить маховику максимальную скорость вращения при остановленных трансмиссии 7 и выключенной управляющей обратимой электрической машине 13.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Заявляемые способ управления рекуперации энергии машины и устройство его реализации позволяют повысить эффективность электромобилей и снизить расход энергии по сравнению с известными устройствами транспортных машин. Потери энергии машин увеличиваются при торможении и при их остановке. Поэтому применение заявляемых способа и устройства управления рекуперации энергии машины позволяет снизить потери энергии и повысить экономичность машин на любых неустановившихся режимах работы путем изменения передаточного отношения между трансмиссией транспортной машины и маховиком по предлагаемой зависимости, которая обеспечивает полную рекуперацию энергии торможения без кинетических потерь и безопасность работы.
Литература:
1. Гулиа Р.В. Инерция. - М.: Наука, 1982. - 152 с.
2. Flywheel drive system (United States patent 4,23 3,85 8 Nov.18. 1980 PCT/US 019778 WO 2008/033378 App. №754, 597 Dec.27, 1976 Int cl3 F16h 37/06, B60K 1/00.
3. И.И.Артоболевский. Теория механизмов и машин. М.: Наука. 1975. 640 с.
4. Кругов В.И. Автоматическое регулирование ДВС.М.: Машгиз, 1963. 600 с.
Изобретение относится к рекуперации энергии торможения транспортной машины. Способ и устройство управления рекуперации энергии машины заключаются в соединении маховика с трансмиссией зубчатым механизмом с переменным передаточным отношением, зависящим от скорости вращения трансмиссии. Изменение передаточного отношения производится автоматически с помощью планетарного дифференциала (5) с числом степеней свободы, равным двум, который соединяет маховик (12), тяговый электродвигатель (6), управляющую обратимую электрическую машину (13) и трансмиссию (7) машины. Применение управляемого сцепления позволяет исключить потери энергии при остановке машины. Изменение передаточного отношения между трансмиссией и маховиком по рекомендуемой зависимости позволяет производить полную рекуперацию энергии торможения. 2 н. и 3 з.п. ф-лы, 3 ил.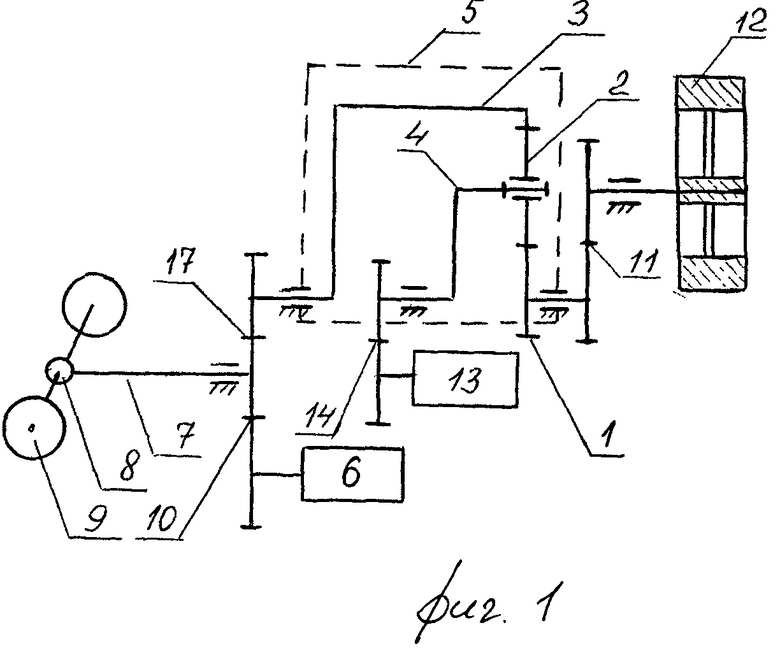
1. Способ управления рекуперацией энергии машины, заключающийся в изменении передаточного отношения вариатора Uвар в кинематической цепи между трансмиссией машины и маховиком, отличающийся тем, что обеспечивается постоянное суммарное значение кинетической энергии трансмиссии машины и маховика изменением передаточного отношения вариатора Uвар по зависимости, которая связывает скорость вращения трансмиссии ωтр и скорость вращения маховика ωмахов
Uвар={[(ωмахов)max/ωтр]2-1}1/2
2. Способ по п.1, отличающийся тем, что скорости вращения входных и выходных звеньев вариатора в кинематической цепи между трансмиссией машины и маховиком имеют противоположные направления.
3. Устройство управления рекуперацией энергии машины, включающее тяговый электродвигатель и трансмиссию, соединенные между собой зубчатой передачей с постоянным передаточным отношением с одной степенью подвижности, включающее также управляющую обратимую электрическую машину, маховик и планетарный дифференциал с двумя степенями подвижности, состоящий из двух центральных зубчатых колес (из которых одно центральное зубчатое колесо с внутренним зубом, а другое центральное зубчатое колесо с внешним зубом называется центральной шестерней), а также из водила и сателлита, расположенного на водиле и находящегося в зацеплении с двумя центральными зубчатыми колесами, причем маховик соединен с центральной шестерней, отличающееся тем, что снабжено дополнительно зубчатой передачей, соединяющей центральную шестерню планетарного дифференциала с маховиком, трансмиссия соединена с центральным зубчатым колесом, а водило соединено с управляющей электрической машиной.
4. Устройство по п.3, отличающееся тем, что снабжено дополнительно управляемым сцеплением, с помощью которого маховик соединен с центральной шестерней планетарного дифференциала, обеспечивающего при выключении возможность вращения маховика при остановке машины и тягового электродвигателя.
5. Устройство по п.4, отличающееся тем, что снабжено дополнительно двумя зубчатыми передачами, соединяющими водило с управляющей обратимой электрической машиной и трансмиссию с центральным зубчатым колесом.
| RU 2011102043 A, 20.06.2011 | |||
| УСТРОЙСТВО РЕКУПЕРАЦИИ ЭНЕРГИИ ТОРМОЖЕНИЯ МАШИНЫ | 2010 |
|
RU2438884C2 |
| СПОСОБ ЭНЕРГОНАКОПИТЕЛЬНОГО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2193706C2 |
| US 4233858 A, 18.11.1980 | |||
| Барбашов Н.Н., Леонов И.В | |||
| Энергетическая модель передаточного механизма с маховичным аккумулятором энергии | |||
| - Вестник МГТУ им | |||
| Н.Э.Баумана, №4, 2010. | |||

