Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству оценки температуры и способу оценки температуры для бесконтактного устройства приема мощности, которое оценивает температуру устройства приема мощности, которое бесконтактным образом принимает мощность, передаваемую от передающей мощность катушки.
Уровень техники
[0002] Была предложена система бесконтактной подачи мощности, которая бесконтактным образом подает мощность, чтобы заряжать аккумулятор, установленный на электрическом транспортном средстве. В системе бесконтактной подачи мощности мощность передается через передающую мощность катушку от устройства передачи мощности, предусмотренного на наземной стороне, и передаваемая мощность получается посредством принимающей мощность катушки устройства приема мощности, установленного на транспортном средстве. Затем, принятая мощность подается к нагрузкам, таким как аккумулятор и мотор.
[0003] В такой системе бесконтактной подачи мощности, когда происходит изменение в промежутке между передающей мощность катушкой и принимающей мощность катушкой или плоскостной позиционный сдвиг между передающей мощность катушкой и принимающей мощность катушкой, потеря мощности передающей мощность катушки увеличивается, и температура принимающей мощность катушки растет вследствие увеличения этой потери мощности. Следовательно, температура устройства приема мощности должна контролироваться.
[0004] Патентная литература 1 раскрывает устройство управления температурой, которое оценивает температуру электронного устройства посредством вычисления. В этой патентной литературе 1 температура оценивается посредством интегрирования количества тепла на основе информации о рабочем режиме и времени работы. Затем, когда оцененная температура достигает порогового значения, рабочий режим переключается на рабочий режим, который формирует меньшее количество тепла. Однако, в патентной литературе 1, температура оценивается посредством определения рабочего режима внутри устройства, и воздействие от внешнего устройства не принимается во внимание.
Список ссылок
Патентная литература
[0005] Патентная литература 1: Японская выложенная патентная заявка № 7-334263
Раскрытие изобретения
[0006] Как описано выше, для того, чтобы предотвращать увеличение температуры бесконтактного устройства приема мощности, причем температура этого бесконтактного устройства приема мощности должна контролироваться. Однако, если установлен датчик температуры, возникают проблемы в том, что устройство увеличивается в размерах, и увеличивается стоимость, и, следовательно, увеличивается потребность в оценке температуры без установки устройства, такого как датчик температуры.
[0007] Настоящее изобретение было выполнено для того, чтобы решать традиционные проблемы, и имеет целью предоставлять устройство оценки температуры и способ оценки температуры для бесконтактного устройства приема мощности, приспособленные точно оценивать температуру окружающей среды для принимающей мощность катушки.
[0008] Устройство оценки температуры для бесконтактного устройства приема мощности согласно аспекту настоящего изобретения включает в себя: блок получения потери мощности на передающей мощность стороне, который получает потерю мощности передающей мощность катушки; и блок оценки температуры, который оценивает температуру окружающей среды для принимающей мощность катушки на основе предварительно заданного количества формируемого тепла для устройства приема мощности и потери мощности передающей мощность катушки. Когда позиционное соотношение между передающей мощность катушкой и принимающей мощность катушкой сдвигается от нормального позиционного соотношения, блок оценки температуры увеличивает, в соответствии с величиной интервала позиционного сдвига, вклад в рост температуры вследствие потери мощности передающей мощность катушки.
[0009] Способ оценки температуры для бесконтактного устройства приема мощности согласно аспекту настоящего изобретения включает в себя этапы: получения потери мощности передающей мощность катушки; и оценку температуры окружающей среды для принимающей мощность катушки на основе предварительно заданного количества формируемого тепла для устройства приема мощности и потери мощности передающей мощность катушки. Способ оценки температуры увеличивает вклад в рост температуры вследствие потери мощности передающей мощность катушки, в соответствии с величиной интервала позиционного сдвига, при оценке температуры окружающей среды для принимающей мощность катушки, в случае, когда позиционное соотношение между передающей мощность катушкой и принимающей мощность катушкой сдвигается от нормального позиционного соотношения.
Краткое описание чертежей
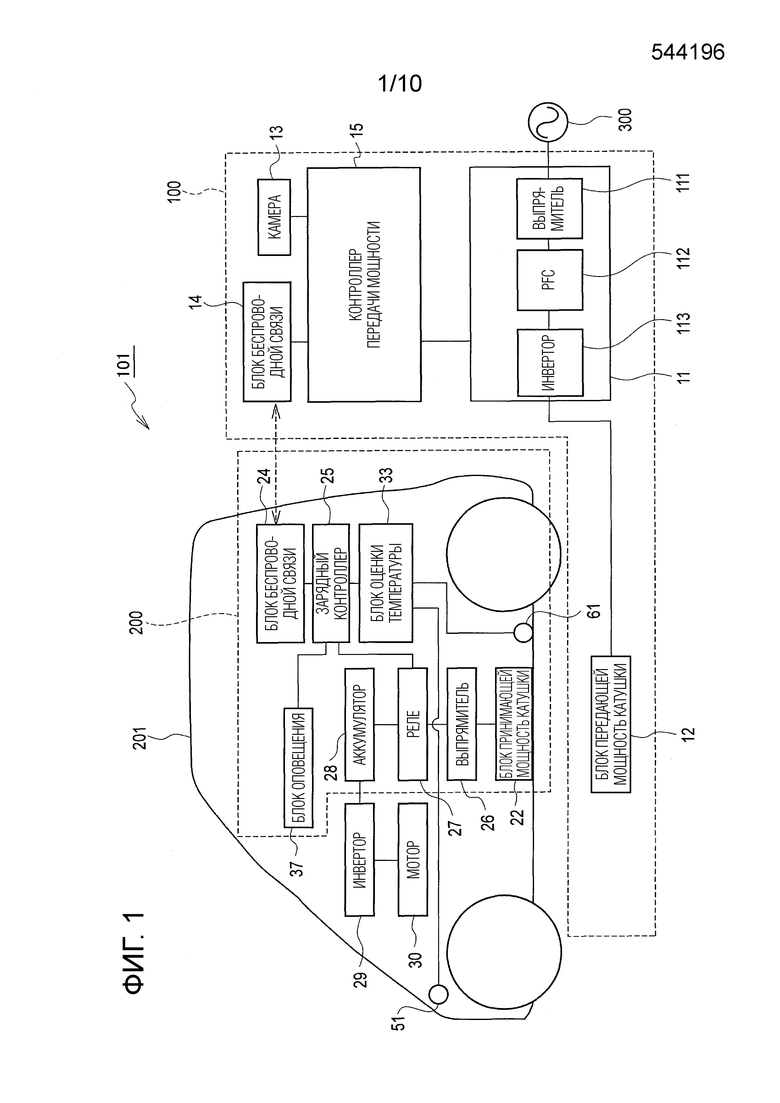
[0010] Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию системы бесконтактной подачи мощности, включающей в себя бесконтактное устройство приема мощности, к которому применяется устройство оценки температуры согласно варианту осуществления настоящего изобретения.
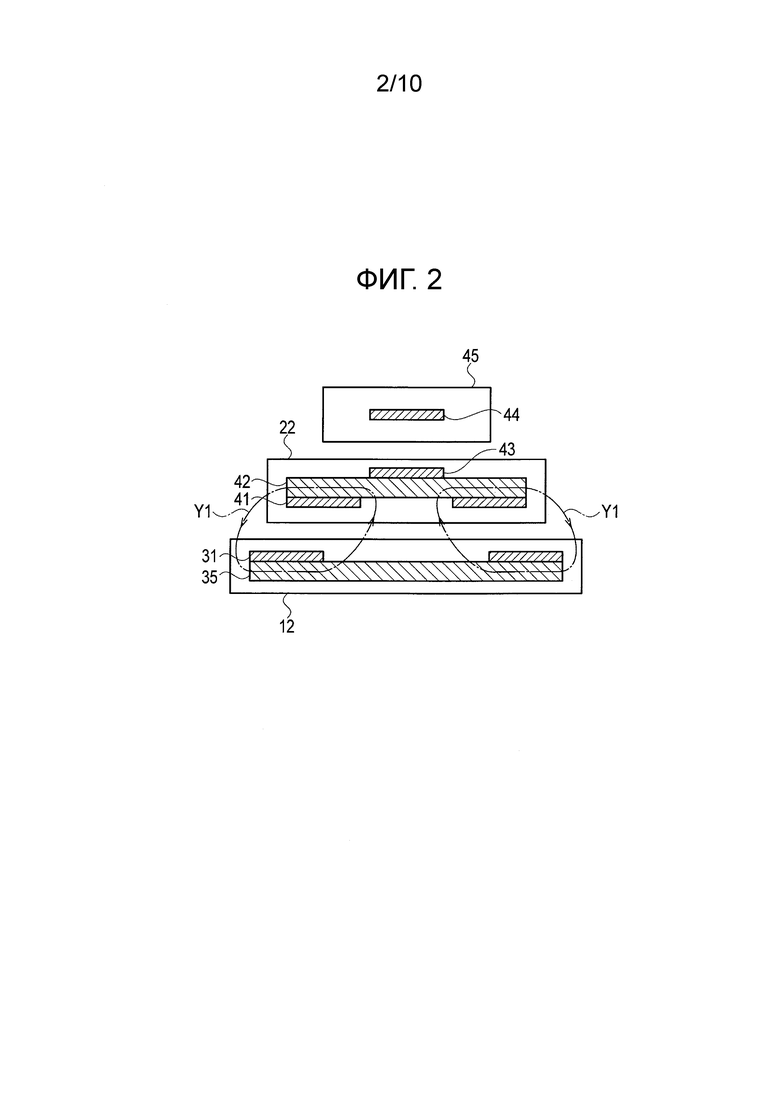
Фиг. 2 представляет собой пояснительный вид, иллюстрирующий магнитный поток, создаваемый между блоком передающей мощность катушки и блоком принимающей мощность катушки согласно варианту осуществления настоящего изобретения.
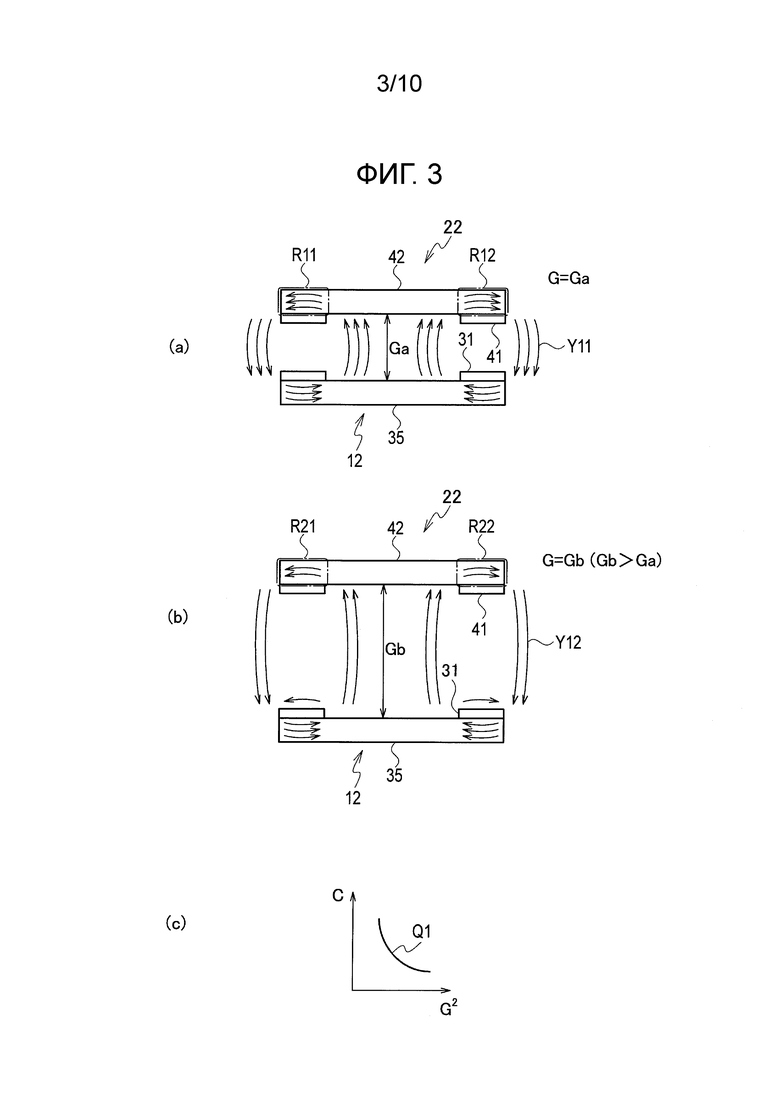
Фиг. 3(a) представляет собой пояснительный вид, иллюстрирующий магнитный поток, когда промежуток между блоком передающей мощность катушки и блоком принимающей мощность катушки равен Ga, фиг. 3(b) представляет собой пояснительный вид, иллюстрирующий магнитный поток, когда промежуток равен Gb, и фиг. 3(c) представляет собой график характеристики, иллюстрирующий соотношение между квадратом промежутка и поправочным коэффициентом C.
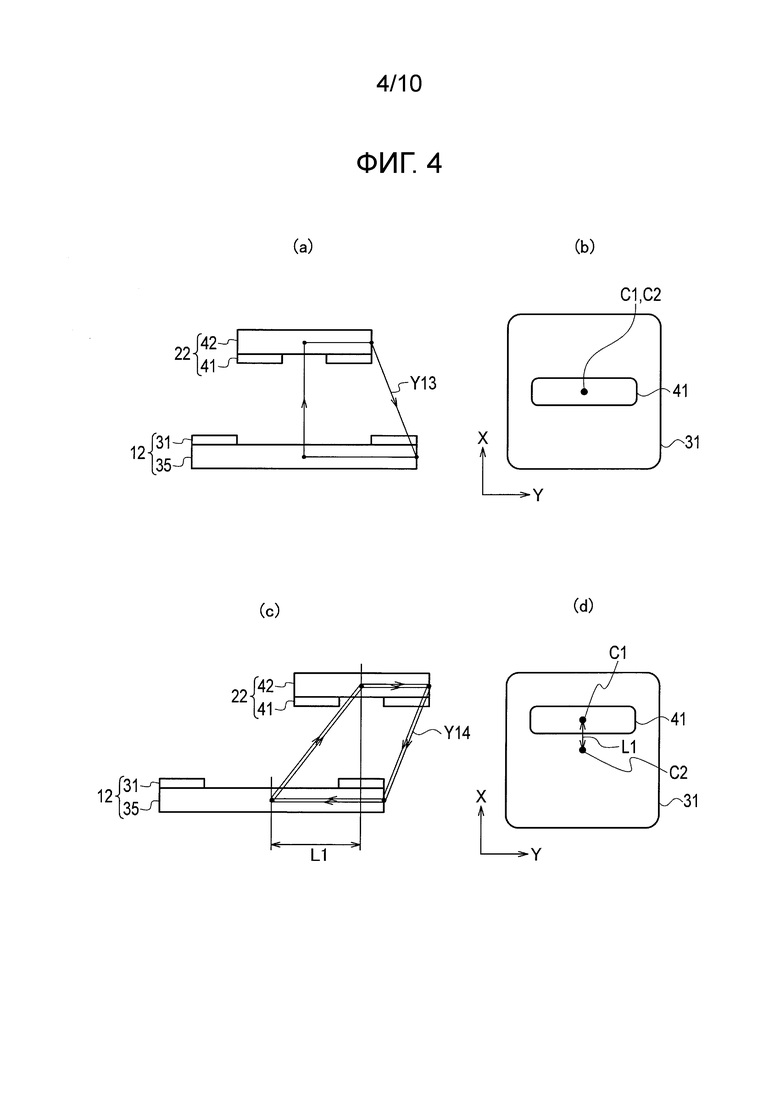
Фиг. 4(a) представляет собой пояснительный вид, иллюстрирующий магнитный поток, когда не существует позиционного сдвига в направлении короткой стороны между блоком передающей мощность катушки и блоком принимающей мощность катушки, фиг. 4(b) представляет собой пояснительный вид, иллюстрирующий позиционное соотношение между блоком передающей мощность катушки и блоком принимающей мощность катушки в случае на фиг. 4(a); фиг. 4(c) представляет собой пояснительный вид, иллюстрирующий магнитный поток, когда существует позиционный сдвиг в направлении короткой стороны между блоком передающей мощность катушки и блоком принимающей мощность катушки, и фиг. 4(d) представляет собой пояснительный вид, иллюстрирующий позиционное соотношение между блоком передающей мощность катушки и блоком принимающей мощность катушки в случае на фиг. 4(c).
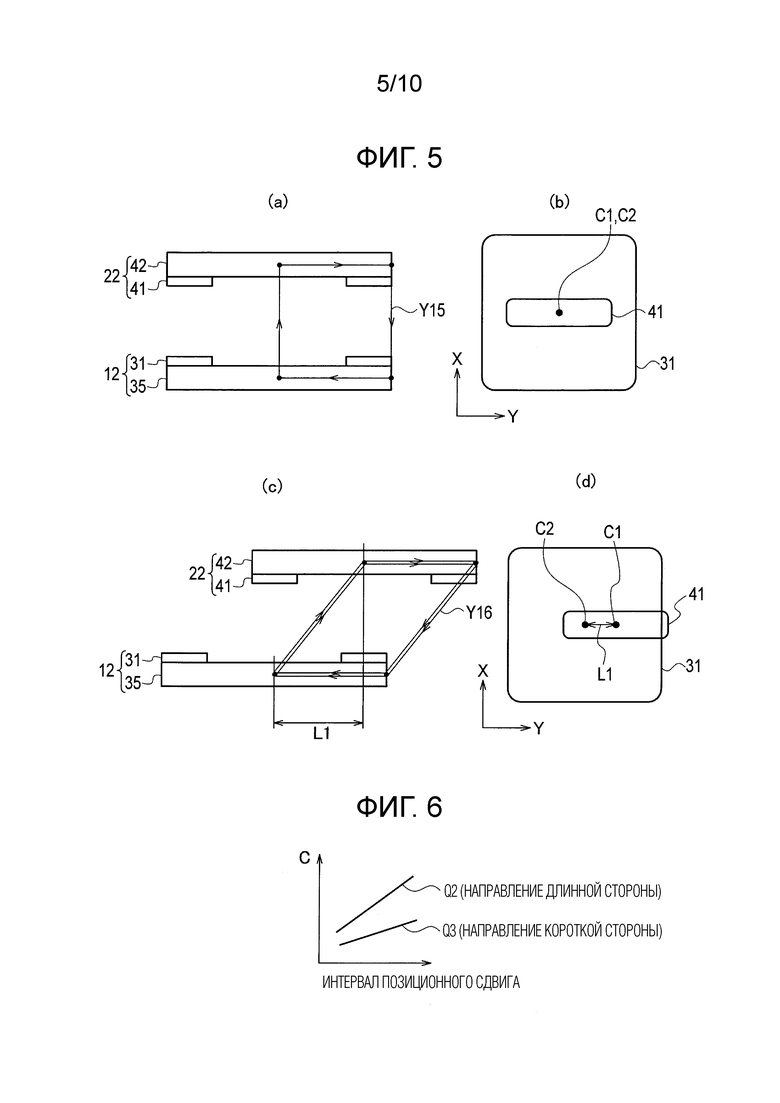
Фиг. 5(a) представляет собой пояснительный вид, иллюстрирующий магнитный поток, когда не существует позиционного сдвига в направлении длинной стороны между блоком передающей мощность катушки и блоком принимающей мощность катушки, фиг. 5(b) представляет собой пояснительный вид, иллюстрирующий позиционное соотношение между блоком передающей мощность катушки и блоком принимающей мощность катушки в случае на фиг. 5(a); фиг. 5(c) представляет собой пояснительный вид, иллюстрирующий магнитный поток, когда существует позиционный сдвиг в направлении длинной стороны между блоком передающей мощность катушки и блоком принимающей мощность катушки, и фиг. 5(d) представляет собой пояснительный вид, иллюстрирующий позиционное соотношение между блоком передающей мощность катушки и блоком принимающей мощность катушки в случае на фиг. 5(c).
Фиг. 6 представляет собой график характеристики, иллюстрирующий соотношение между интервалами позиционного сдвига в направлении короткой стороны и направлении длинной стороны и поправочным коэффициентом C.
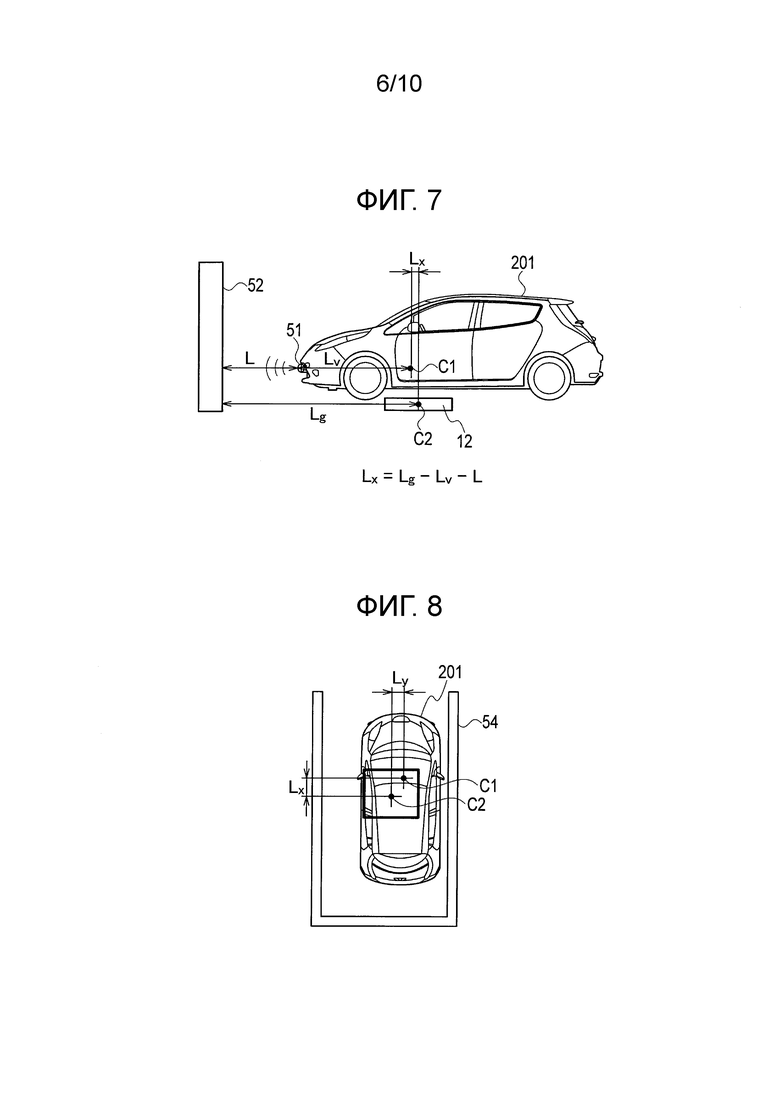
Фиг. 7 представляет собой пояснительный вид, иллюстрирующий, как интервал позиционного сдвига в направлении X-оси (направлении короткой стороны) измеряется с помощью датчика расстояния спереди.
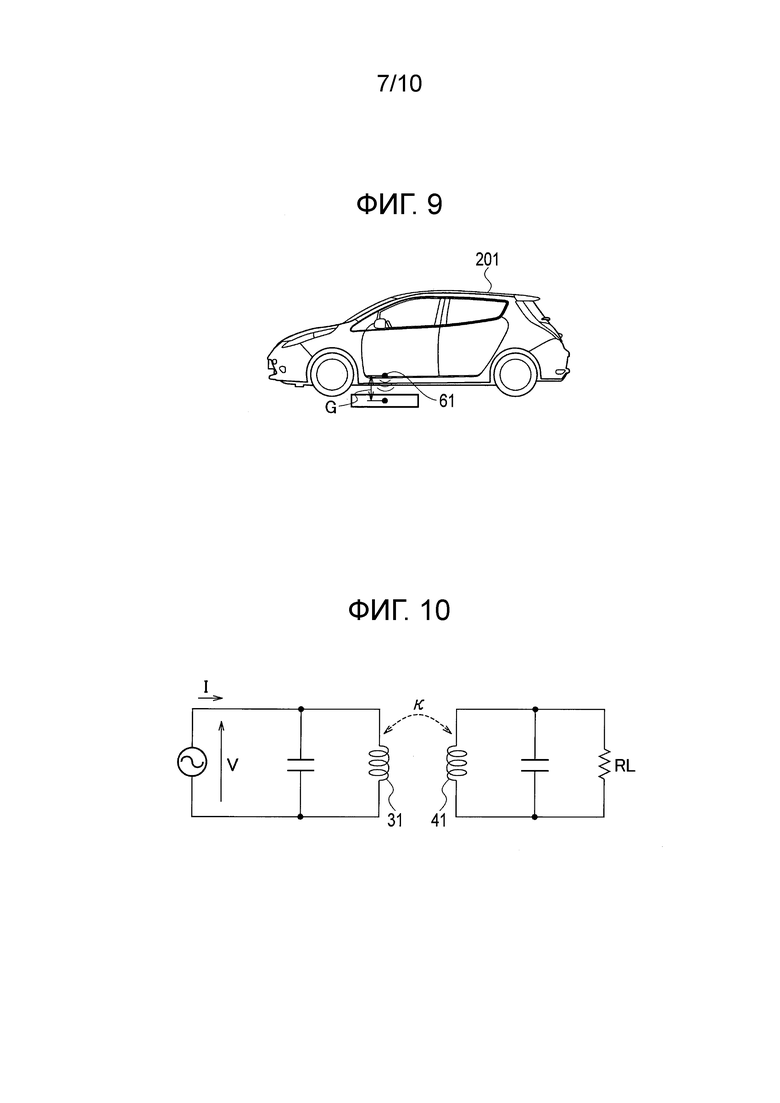
Фиг. 8 представляет собой пояснительный вид, иллюстрирующий, как интервалы позиционного сдвига в направлении X-оси и направлении Y-оси (направлении длинной стороны) измеряются из изображения вида с высоты птичьего полета для транспортного средства. Фиг. 9 - это пояснительный вид, иллюстрирующий, как промежуток G измеряется с помощью датчика промежутка.
Фиг. 10 представляет собой эквивалентную схему блока передающей мощность катушки и блока принимающей мощность катушки.
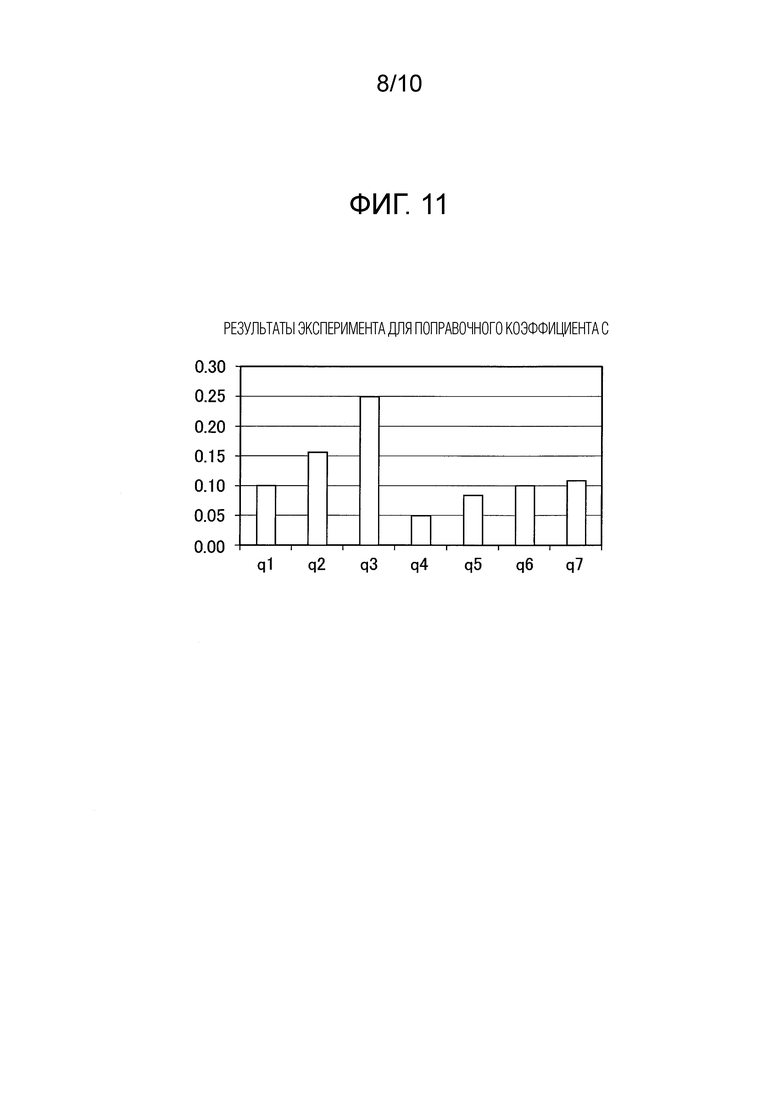
Фиг. 11 представляет собой график, иллюстрирующий соотношение между интервалом позиционного сдвига между блоком передающей мощность катушкой и блоком принимающей мощность катушки и поправочным коэффициентом C.
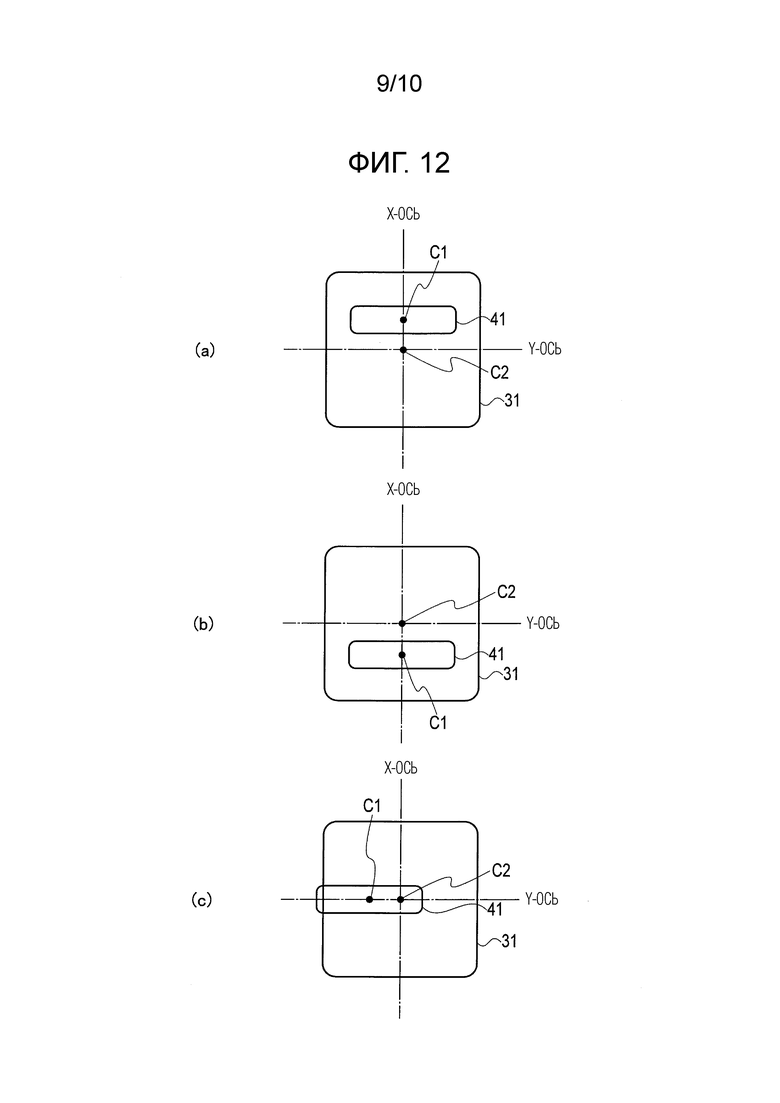
Фиг. 12(a)-12(c) представляют собой пояснительные виды, каждый, иллюстрирующие позиционное соотношение между передающей мощность катушкой и принимающей мощность катушкой и иллюстрирующие случай, когда позиционный сдвиг возникает на положительной стороне в направлении короткой стороны, случай, когда позиционный сдвиг возникает на отрицательной стороне в направлении короткой стороны, и случай, когда позиционный сдвиг возникает в направлении длинной стороны, соответственно.
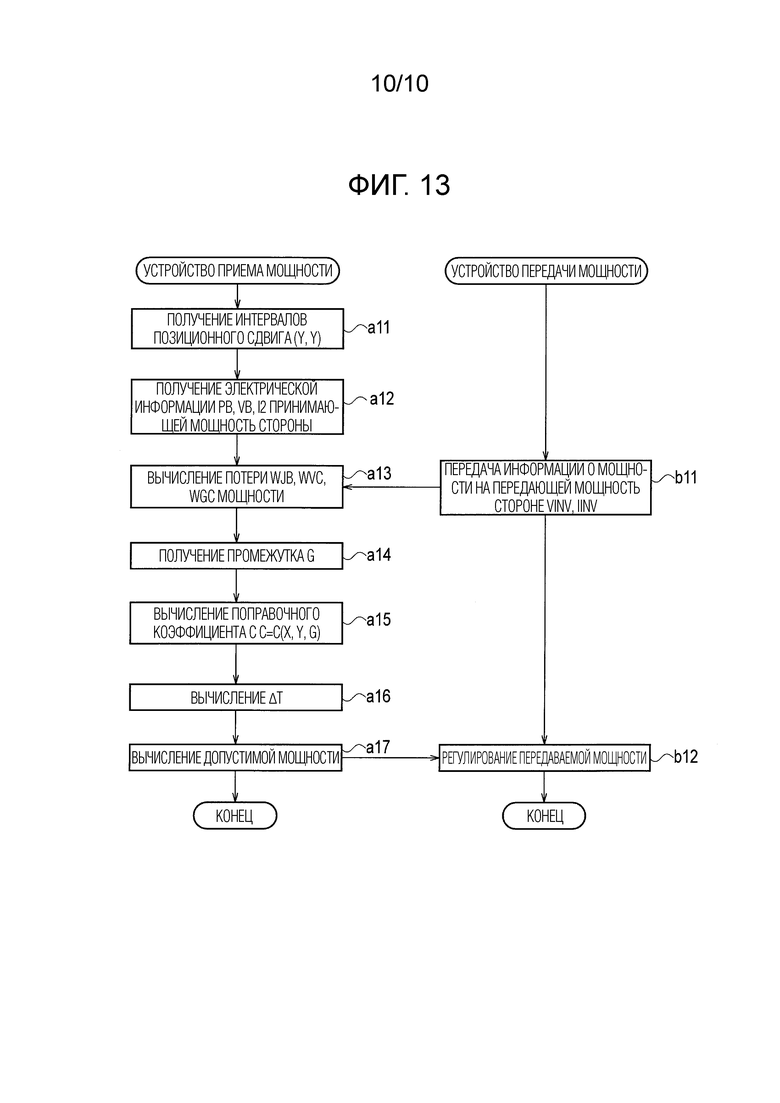
Фиг. 13 представляет собой блок-схему последовательности операций, иллюстрирующую процедуру обработки оценки температуры согласно варианту осуществления настоящего изобретения.
Осуществление изобретения
[0011] Далее в данном документе вариант осуществления настоящего изобретения будет описан со ссылкой на чертежи. Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию системы бесконтактной подачи мощности согласно варианту осуществления настоящего изобретения. Как иллюстрировано на фиг. 1, система 101 бесконтактной подачи мощности согласно настоящему варианту осуществления включает в себя: устройство 100 подачи мощности, которое предусматривается на наземной стороне и передает мощность; и устройство 200 приема мощности (бесконтактное устройство приема мощности), которое устанавливается на транспортном средстве 201, принимает мощность, передаваемую от устройства 100 подачи мощности, и заряжает аккумулятор 28.
[0012] Устройство 100 подачи мощности устанавливается на зарядном стенде или т.п., предусматриваемом с парковочным местом для транспортного средства 201, и бесконтактным образом передает мощность транспортному средству 201. Это устройство 100 подачи мощности, главным образом, состоит из контроллера 11 мощности, блока 12 передающей мощность катушки, блока 14 беспроводной связи и контроллера 15 передачи мощности. Кроме того, это устройство 100 подачи мощности включает в себя камеру 13, которая изображает, сверху парковочного места, транспортное средство 201, припаркованное в этом парковочном месте. [0013] Контроллер 11 мощности имеет функцию преобразования мощности переменного тока (AC), выводимой от источника 300 AC-мощности (например, 50 Гц, 200 В), в высоковольтную AC-мощность и передает мощность блоку 12 передающей мощность катушки. Этот контроллер 11 мощности включает в себя выпрямитель 111, PFC (корректировка коэффициента мощности) схему 112 и инвертор 113.
[0014] Выпрямитель 111 преобразует AC-мощность, выводимую от источника 300 AC-мощности, в мощность переменного тока (DC). PFC-схема 112 включает в себя, например, схему повышающего модулятора и т.д. и является схемой для улучшения коэффициента мощности посредством формирования формы волны выходного тока от выпрямителя 111. Выходной сигнал PFC-схемы 112 сглаживается посредством сглаживающего конденсатора.
[0015] Инвертор 113 включает в себя множество переключающих элементов (например, биполярный транзистор с изолированным затвором (IGBT)) и преобразует DC-мощность в AC-мощность желаемой частоты, управляя включением/выключением каждого переключающего элемента.
[0016] Блок 12 передающей мощность катушки предусматривается в позиции, которая обращена лицевой стороной, когда транспортное средство 201 останавливается в желаемой позиции парковочного места, к блоку 22 принимающей мощность катушки, предусмотренному в устройстве 200 приема мощности. Затем, блок 12 передающей мощность катушки бесконтактным образом передает мощность блоку 22 принимающей мощность катушки. Этот блок 12 передающей мощность катушки включает в себя передающую мощность катушку 31 и ферритовую пластину 35, сформированную из материала с высокой магнитной проницаемостью и имеющую плоскую форму, как иллюстрировано на фиг. 2.
[0017] Блок 14 беспроводной связи выполняет двухстороннюю связь с блоком 24 беспроводной связи, предусмотренным в устройстве 200 приема мощности. Посредством этой связи, как описано ниже, различные данные, такие как выходное напряжение Vinv и выходной ток Iinv инвертора 113, обнаруженные посредством устройства 100 подачи мощности, и потеря WGC мощности в блоке 12 передающей мощность катушки и коэффициент κ связности, описанный ниже, передаются устройству 200 приема мощности.
[0018] Контроллер 15 передачи мощности, в целом, управляет всем устройством 100 подачи мощности. Этот контроллер 15 передачи мощности может быть сконфигурирован с помощью микрокомпьютера, главным образом, включающего в себя, например, центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс ввода/вывода (I/O). В частности, этот контроллер 15 передачи мощности управляет контроллером 11 мощности, блоком 14 беспроводной связи и камерой 13.
[0019] С другой стороны, устройство 200 приема мощности, установленное на транспортном средстве 201, включает в себя блок 22 принимающей мощность катушки, блок 24 беспроводной связи, зарядный контроллер 25, выпрямитель 26, реле 27 и блок 33 оценки температуры. Кроме того, устройство 200 приема мощности включает в себя аккумулятор 28, который накапливает мощность и подает DC-мощность инвертору 29, и блок 37 оповещения, который оповещает пассажира транспортного средства 201 о различной информации. Инвертор 29 преобразует DC-мощность в AC-мощность и подает преобразованную AC-мощность к мотору 30.
[0020] Кроме того, в передней крайней части транспортного средства 201, предусматривается датчик 51 расстояния спереди для измерения расстояния от этой передней крайней части до поверхности 52 стены (см. фиг. 7), предусмотренной на парковочном месте. Кроме того, в нижней части транспортного средства 201, предусматривается датчик 61 промежутка для измерения расстояния от этой нижней части до блока 12 передающей мощность катушки. В качестве датчика 51 расстояния впереди и датчика 61 промежутка может быть использован, например, ультразвуковой датчик.
[0021] Блок 22 принимающей мощность катушки является катушкой для беспроводного приема мощности, передаваемой от блока 12 передающей мощность катушки. Этот блок 22 принимающей мощность катушки включает в себя передающую мощность катушку 31 и ферритовую пластину 35, сформированную из материала с высокой магнитной проницаемостью и имеющую плоскую форму, как иллюстрировано на фиг. 2.
[0022] Блок 24 беспроводной связи выполняет двухстороннюю связь с блоком 14 беспроводной связи, предусмотренным в устройстве 100 подачи мощности. Выпрямитель 26 соединяется с блоком 22 принимающей мощность катушки, преобразует AC-мощность, выводимую от этого блока 22 принимающей мощность катушки, в DC-мощность и выводит DC-мощность. Этот выпрямитель 26 устанавливается на схемной плате 44 внутри электрического шкафа 45, предусмотренного поблизости от поверхности днища транспортного средства 201, как иллюстрировано на фиг. 2.
[0023] Реле 27 включает в себя реле, включенное/выключенное состояния которого переключаются под управлением зарядного контроллера 25. Реле 27 приспособлено отделять схему, включающую в себя аккумулятор 28 от схемы, включающей в себя блок 22 принимающей мощность катушки и выпрямитель 26, выключая релейный переключатель.
[0024] На основе потери WJB мощности схемной платы 44, установленной внутри электрического шкафа 45 (см. фиг. 2), имеющего выпрямитель 26, установленный в нем, потери WVC мощности в блоке 22 принимающей мощность катушки, и потери WGC мощности в блоке 12 передающей мощность катушки, блок 33 оценки температуры оценивает температуру окружающей среды (температуру окружающей среды для принимающей мощность катушки) для блока 22 принимающей мощность катушки, такого как ферритовая пластина 42, медный провод катушки и другие элементы схемы, с помощью подхода, описанного ниже. Подробности будут описаны ниже. Здесь, количество формируемого тепла, вызванного потерей WJB мощности схемной платы 44 и потерей WVC мощности в блоке 22 принимающей мощность катушки, является количеством формируемого тепла для устройства приема мощности.
[0025] Блок 37 оповещения включает в себя блок отображения, такой как дисплей, и оповещает пассажира транспортного средства 201 о различной информации, включающей в себя информацию о бесконтактной подаче мощности. В частности, как описано ниже, когда температура окружающей среды для блока 22 принимающей мощность катушки оценивается как превышающая пороговую температуру посредством блока 33 оценки температуры, этот факт отображается на дисплее. Кроме того, когда окружающая температура оценивается как превышающая пороговую температуру, и, таким образом, передаваемая мощность от устройства 100 подачи мощности уменьшается (подробности будут описаны ниже), и время, необходимое, чтобы заряжать аккумулятор 28, соответственно изменяется, этот факт отображается на дисплее для оповещения пассажира.
[0026] Зарядный контроллер 25, в целом, управляет устройством 200 приема мощности. В частности, зарядный контроллер 25 получает информацию о выходном напряжении Vinv и выходном токе Iinv инвертора 113, которая передается от устройства 100 подачи мощности через блок 24 беспроводной связи. Кроме того, зарядный контроллер 25 получает информацию о потере WGC мощности в блоке 12 передающей мощность катушки. Т.е., зарядный контроллер 25 имеет функцию блока получения потери мощности на передающей мощность стороне, который получает информацию о потере мощности блока 12 передающей мощность катушки.
[0027] Кроме того, зарядный контроллер 25 имеет функцию блока получения интервала позиционного сдвига, который получает интервалы плоскостного позиционного сдвига Lx, Ly блока 22 принимающей мощность катушки от блока 12 передающей мощность катушки, и промежуток G, на основе расстояния до поверхности 52 стены, обнаруженного посредством датчика 51 расстояния спереди, и расстояния до блока 12 передающей мощность катушки, обнаруженного посредством датчика 61 промежутка. Зарядный контроллер 25 и блок 33 оценки температуры могут быть сконфигурированы с помощью микрокомпьютера, главным образом, включающего в себя, например, центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс ввода/вывода (I/O).
[0028] Затем, в системе 101 бесконтактной подачи мощности, иллюстрированной на фиг. 1, мощность передается в бесконтактном состоянии посредством электромагнитной индукции между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки. Т.е., если электрический ток протекает через блок 12 передающей мощность катушки, магнитная связь возникает между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки, так что мощность может бесконтактным образом быть передана блоку 22 принимающей мощность катушки от блока 12 передающей мощность катушки.
[0029] Кроме того, в настоящем варианте осуществления, когда окружающая температура блока 22 принимающей мощность катушки достигает предварительно заданной пороговой температуры во время передачи мощности, передаваемая мощность уменьшается, чтобы предотвращать ненормальный рост температуры окружающей среды для блока 22 принимающей мощность катушки.
[0030] Далее, фактор, вызывающий увеличение температуры блока 22 принимающей мощность катушки во время передачи мощности, будет объяснен со ссылкой на фиг. 2. Фиг. 2 - это пояснительный вид, иллюстрирующий магнитный поток, создаваемый между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки.
[0031] Фактор, вызывающий увеличение температуры окружающей среды для блока 22 принимающей мощность катушки, иллюстрированного на фиг. 2, включает в себя потерю WJB мощности внутри электрического ящика 45. Как иллюстрировано на фиг. 2, схемная плата 44 размещается внутри электрического шкафа 45, и различные электронные компоненты, включающие в себя выпрямитель 26, устанавливаются на этой схемной плате 44. Соответственно, эта схемная плата 44 формирует тепло вследствие потери WJB мощности, формируемой во время работы, вызывая увеличение температуры окружающей среды для блока 22 принимающей мощность катушки.
[0032] Кроме того, фактор, вызывающий увеличение в температуре окружающей среды для блока 22 принимающей мощность катушки, может включать в себя потерю WVC мощности блока 22 принимающей мощность катушки и потерю WGC мощности блока 12 передающей мощность катушки. Соответственно, если увеличение температуры блока 22 принимающей мощность катушки обозначается как ΔT, это увеличение температуры ΔT может быть выражено формулой (1) ниже с помощью поправочных коэффициентов A, B и C.
ΔT=A*WJB+B*WVC+C*WGC (1)
Отметим, что ΔT является увеличением температуры после того, как прошло достаточно времени.
[0033] Затем, увеличение температуры ΔT может быть вычислено из формулы (1), и, кроме того, температура окружающей среды блока 22 принимающей мощность катушки может быть оценена на основе температуры окружающей среды, обнаруженной посредством датчика температуры окружающей среды (не иллюстрирован), предусмотренного на своем месте в устройстве 100 подачи мощности или транспортном средстве 201. В частности, температура окружающей среды для блока 22 принимающей мощность катушки может быть получена посредством добавления увеличения температуры ΔT к температуре окружающей среды.
[0034] Кроме того, в формуле (1), поскольку каждая из потерь WJB, WVC и WGC мощности является потерей в обмотке и пропорциональна квадрату электрического тока, температура окружающей среды для блока 22 принимающей мощность катушки может быть вычислена на основе электрического тока, протекающего через схемную плату 44 внутри электрического шкафа 45, электрического тока, протекающего через схему, включающую в себя схемную плату 43 блока 22 принимающей мощность катушки, и электрического тока, протекающего через блок 12 передающей мощность катушки. Кроме того, поскольку поправочные коэффициенты A и B являются числовыми значениями, характерными для устройства 200 приема мощности, они уже известны. Соответственно, если поправочный коэффициент C для потери WGC мощности в блоке 12 передающей мощность катушки может быть получен, увеличение температуры ΔT может быть вычислено из вышеописанной формулы (1). Поправочный коэффициент C является числовым значением, изменяющимся с относительным позиционным соотношением между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки, и способ их вычисления будет описан ниже.
[0035] Далее, будет объяснен принцип, которым блок 22 принимающей мощность катушки формирует тепло при бесконтактной передаче мощности к блоку 22 принимающей мощность катушки от блока 12 передающей мощность катушки, и соотношение с поправочным коэффициентом C. Как иллюстрировано на фиг. 2, блок 12 передающей мощность катушки состоит из ферритовой пластины 35 и передающей мощность катушки 31, намотанной вокруг верхней поверхности этой ферритовой пластины 35. Кроме того, блок 22 принимающей мощность катушки включает в себя ферритовую пластину 42 и принимающую мощность катушку 41, намотанную вокруг нижней поверхности этой ферритовой пластины 42, и, кроме того, схемная плата 43, имеющая различные электронные компоненты, установленные на ней, предусматривается на верхней поверхности ферритовой пластины 42.
[0036] Затем, когда транспортное средство 201 останавливается в желаемой позиции на парковочном месте, блок 22 принимающей мощность катушки устанавливается в позиции, обращенной лицевой стороной к блоку 12 передающей мощность катушки. Соответственно, если в этом состоянии электрический ток подается к передающей мощность катушке 31 для возбуждения, магнитный поток формируется, как указано стрелкой Y1. Поскольку этот магнитный поток проходит через ферритовую пластину 42 блока 22 принимающей мощность катушки и взаимосвязывает с принимающей мощность катушкой 41, мощность будет передаваться этой принимающей мощность катушке 41.
[0037] Кроме того, магнитный поток, проходящий через ферритовую пластину 42, изменяется с относительным позиционным соотношением между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки. Т.е., когда транспортное средство 201 не останавливается в желаемой позиции внутри парковочного места, плоскостной позиционный сдвиг происходит между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки. Кроме того, расстояние (промежуток G) между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки изменяется с числом пассажиров, едущих в транспортном средстве 201 и т.п. Когда такой позиционный сдвиг происходит, магнитный поток, проходящий через ферритовую пластину 42, изменяется, чтобы формировать часть магнитного потока высокой плотности, и, следовательно, возникает магнитное насыщение, что вызывает формирование тепла. Т.е., количество формируемого тепла будет изменяться с относительным позиционным соотношением между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки.
[0038] Далее в данном документе то, как магнитный поток, проходящий через ферритовую пластину 42 блока 22 принимающей мощность катушки, изменяется с промежутком G между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки, будет объяснено со ссылкой на фиг. 3.
[0039] Фиг. 3(a) иллюстрирует магнитный поток, когда промежуток G, который является расстоянием между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки, является опорным значением Ga, в то время как фиг. 3(b) иллюстрирует магнитный поток, когда промежуток G становится равным значению Gb, которое больше опорного значения Ga. Как видно из фиг. 3(a) и 3(b), когда промежуток G становится длиннее, магнитный поток, который достигает блока 22 принимающей мощность катушки от блока 12 передающей мощность катушки, увеличивается. Т.е., магнитный поток, указанный стрелкой Y12, уменьшается относительно магнитного потока, указанного стрелкой Y11. Более конкретно, магнитный поток, проходящий через области R21 и R22, иллюстрированные на фиг. 3(b), уменьшается относительно магнитного потока, проходящего через области R11 и R12, иллюстрированные на фиг. 3(a).
[0040] В результате, магнитный поток, проходящий через ферритовую пластину 42 блока 22 принимающей мощность катушки, уменьшается, и количество формируемого тепла этой ферритовой пластины 42 уменьшается. В этом случае, поскольку магнитный поток, проходящий через ферритовую пластину 42, уменьшается в обратной пропорции к квадрату промежутка G, количество формируемого тепла будет уменьшаться в обратной пропорции к квадрату промежутка G. Соответственно, как иллюстрировано на фиг. 3(c), вышеописанный поправочный коэффициент C может быть задан так, чтобы иметь характеристику, обратно пропорциональную квадрату промежутка G.
[0041] Далее, изменение в количестве формируемого тепла, соответствующее интервалу плоскостного позиционного сдвига блока 22 принимающей мощность катушки от блока 12 передающей мощность катушки, будет объяснено со ссылкой на пояснительные виды, иллюстрированные на фиг. 4-6. Фиг. 4(a) -это вид в поперечном сечении в направлении X-оси, когда блок 22 принимающей мощность катушки позиционно не сдвигается от блока 12 передающей мощность катушки, в котором стрелка Y13 указывает магнитный поток. Кроме того, фиг. 4(b) схематично иллюстрирует вид сверху в этом случае. Отметим, что, как иллюстрировано на фиг. 4(b), принимающая мощность катушка 41 имеет прямоугольную форму, в которой направление короткой стороны задается в направление X-оси.
[0042] С другой стороны, фиг. 4(c) -это вид в поперечном сечении в направлении X-оси, когда блок 22 принимающей мощность катушки позиционно сдвигается на расстояние L1 в направлении X-оси, в котором стрелка Y14 указывает магнитный поток. Кроме того, фиг. 4(d) схематично иллюстрирует вид сверху в этом случае.
[0043] Как видно из сравнения между фиг. 4(a) и фиг. 4(c), позиционный сдвиг в направлении X-оси, возникающий между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки, уменьшает коэффициент связности (обозначенный как "κ") между обеими катушками. Соответственно, контроллер 15 передачи мощности устройства 100 подачи мощности увеличивает мощность, подаваемую к блоку 12 передающей мощность катушки, так что желаемая мощность генерируется в блоке 22 принимающей мощность катушки. В результате, магнитный поток, выводимый от передающей мощность катушки 31, увеличивается, как иллюстрировано на фиг. 4(c), и магнитный поток, проходящий через ферритовую пластину 42, также увеличивается соответствующим образом. Следовательно, концентрация магнитного потока возникает в ферритовой пластине 42, вызывая увеличение температуры окружающей среды для блока 22 принимающей мощность катушки. Кроме того, температура окружающей среды для блока 22 принимающей мощность катушки будет увеличиваться линейно относительно интервала позиционного сдвига в направлении X-оси.
[0044] Далее будет объяснен позиционный сдвиг в направлении Y-оси (направлении, перпендикулярном X-оси). Фиг. 5(a) -это вид в поперечном сечении в направлении Y-оси, когда блок 22 принимающей мощность катушки позиционно не сдвигается от блока 12 передающей мощность катушки, в котором стрелка Y15 указывает магнитный поток. Кроме того, фиг. 5(b) схематично иллюстрирует вид сверху в этом случае. Отметим, что, как иллюстрировано на фиг. 5(b), принимающая мощность катушка 41 имеет прямоугольную форму, в которой направление длинной стороны задается в направление Y-оси.
[0045] С другой стороны, фиг. 5(c) -это вид в поперечном сечении в направлении Y-оси, когда блок 22 принимающей мощность катушки позиционно сдвигается на расстояние L1 в направлении Y-оси, в котором стрелка Y16 указывает магнитный поток. Кроме того, фиг. 5(d) схематично иллюстрирует вид сверху в этом случае.
[0046] Как видно из сравнения между фиг. 5(a) и фиг. 5(c), позиционный сдвиг в направлении Y-оси, возникающий между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки, уменьшает коэффициент κ связности между обеими катушками. Соответственно, контроллер 15 передачи мощности устройства 100 подачи мощности увеличивает мощность, подаваемую к блоку 12 передающей мощность катушки, так что желаемая мощность генерируется в блоке 22 принимающей мощность катушки. В результате, магнитный поток, выводимый от передающей мощность катушки 31, увеличивается, как иллюстрировано на фиг. 5(c), и магнитный поток, проходящий через ферритовую пластину 42, также увеличивается соответствующим образом. Следовательно, концентрация магнитного потока возникает в ферритовой пластине 42, вызывая увеличение температуры окружающей среды для блока 22 принимающей мощность катушки. Кроме того, температура окружающей среды для блока 22 принимающей мощность катушки будет увеличиваться линейно относительно интервала позиционного сдвига в направлении Y-оси.
[0047] Кроме того, позиционный сдвиг в направлении Y-оси влияет на увеличение температуры больше вышеописанного позиционного сдвига в направлении X-оси. Т.е., когда интервалы позиционного сдвига в обоих направления являются одинаковыми, позиционный сдвиг в направлении Y-оси (направлении длинной стороны) формирует больше тепла, чем позиционный сдвиг в направлении X-оси (направлении короткой стороны). Соответственно, как иллюстрировано на фиг. 6, поправочный коэффициент C может быть задан так, чтобы линейно изменяться относительно интервала позиционного сдвига в направлении X-оси (см. прямую линию Q3), и поправочный коэффициент C может быть задан так, чтобы линейно изменяться относительно интервала позиционного сдвига в направлении Y-оси (направлении длинной стороны) (см. прямую линию Q2). В этом случае поправочный коэффициент C задается так, что прямая линия Q2 имеет больший уклон, чем прямая линия Q3.
[0048] Кроме того, в общих словах, выясняется, что существуют соотношения (A) и (B) ниже между поправочным коэффициентом C и позиционным соотношением между катушками.
(A) Поправочный коэффициент C обратно пропорционален квадрату промежутка G между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки.
(B) Поправочный коэффициент C изменяется линейно относительно интервала позиционного сдвига (это обозначается как "Lx") в направлении X-оси и интервала позиционного сдвига (это обозначается как "Ly") в направлении Y-оси.
[0049] Соответственно, если поправочный коэффициент C определяется на основе соотношений (A) и (B), количество формируемого тепла вследствие потери WGC мощности катушки передающей мощность стороны может быть скорректировано. В частности, поправочный коэффициент C может быть получен из формулы (2) ниже с помощью коэффициентов a, b и c.
C=(a*Lx+b*Ly+c)/G2 (2)
[0050] Затем, блок 33 оценки температуры, иллюстрированный на фиг. 1, получает интервалы позиционного сдвига Lx, Ly и промежуток G, чтобы, тем самым, вычислять поправочный коэффициент C, подставляет этот поправочный коэффициент C в вышеописанную формулу (1) и умножает поправочный коэффициент C на потерю WGC мощности передающей мощность катушки 31, тем самым, получая увеличение температуры ΔT. Т.е., вклад в увеличение температуры из-за передающей мощность катушки 31 изменяется с помощью поправочного коэффициента C, который изменяется с величиной интервала позиционного сдвига. Таким образом, температура окружающей среды для блока 22 принимающей мощность катушки оценивается посредством добавления увеличения температуры ΔT к температуре окружающей среды для блока 22 принимающей мощность катушки, и управление проводится, когда эта оцениваемая температура достигает предварительно заданной пороговой температуры, таким образом, чтобы сдерживать передаваемую мощность и сдерживать дополнительное увеличение температуры.
[0051] Далее, способ определения интервалов плоскостного позиционного сдвига Lx, Ly будет объяснен со ссылкой на фиг. 7 и фиг. 8. Фиг. 7 - это пояснительный вид, иллюстрирующий первый способ определения интервала позиционного сдвига Lx в направлении X-оси. Как иллюстрировано на фиг. 7, датчик 51 расстояния спереди, предусмотренный в передней крайней части транспортного средства 201, передает ультразвуковой сигнал, чтобы измерять расстояние L до поверхности 52 стены, предусмотренной на своем месте на парковочном месте. Затем, на основе расстояния Lg (известное числовое значение) от центральной точки C2 блока 12 передающей мощность катушки до поверхности 52 стены, расстояния Lv (известное числовое значение) от центральной точки C1 блока 22 принимающей мощность катушки до передней крайней части, и расстояния L (измеренное значение), расстояние между соответствующими центральными точками C1 и C2, т.е., интервал позиционного сдвига Lx в направлении X-оси, вычисляется по формуле (3) ниже.
Lx=Lg-Lv-L (3)
Таким образом, интервал позиционного сдвига Lx в направлении X-оси может быть получен.
[0052] Фиг. 8 - это пояснительный вид, иллюстрирующий второй способ определения интервала позиционного сдвига Lx в направлении X-оси и интервала позиционного сдвига Ly в направлении Y-оси. Транспортное средство 201, останавливающееся внутри парковочной рамки 54 парковочного места, фотографируется сверху с помощью камеры 13, предусмотренной в устройстве 100 подачи мощности. В результате, может быть получено изображение вида с высоты птичьего полета типа изображения, иллюстрированного на фиг. 8. Затем, интервал плоскостного позиционного сдвига между центральной точкой C2 блока 12 передающей мощность катушки и центральной точкой C1 блока 22 принимающей мощность катушки измеряется на основе позиционного соотношения между транспортным средством 201 и парковочной рамкой 54. В частности, как иллюстрировано на фиг. 8, могут быть получены интервал позиционного сдвига Lx в направлении X-оси и интервал позиционного сдвига Ly в направлении Y-оси.
[0053] Далее, способ определения промежутка G между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки будет объяснен со ссылкой на фиг. 9 и фиг. 10. Как иллюстрировано на фиг. 9, датчик 61 промежутка, установленный на части днища транспортного средства 201, может измерять промежуток G, передавая ультразвуковой сигнал и принимая его отраженный сигнал.
[0054] Кроме того, в качестве другого способа, промежуток G может быть получен на основе коэффициента κ связности между передающей мощность катушкой 31 и принимающей мощность катушкой 41 и соответствующих интервалов позиционного сдвига Lx, Ly. Далее в данном документе это будет объяснено со ссылкой на фиг. 10 и фиг. 11. Фиг. 10 является эквивалентной схемой блока 12 передающей мощность катушки и блока 22 принимающей мощность катушки, в которой нагрузка RL соответствует аккумулятору 28, иллюстрированному на фиг. 1. Как описано в выложенной публикации японского патента № 2013-81275, известно, что существует соотношение формулы (4) ниже между напряжением V, генерируемым в передающей мощность катушке 31, электрическим током I, протекающим через передающую мощность катушку 31, и коэффициентом κ связности между передающей мощность катушкой 31 и принимающей мощность катушкой 41.
[Мат. 1]

где K1-K7 являются известными числовыми значениями.
[0055] Соответственно, коэффициент κ связности может быть получен посредством измерения напряжения V, генерируемого в передающей мощность катушке 31, и электрического тока I, протекающего через передающую мощность катушку 31. Этот коэффициент κ связности может быть получен зарядным контроллером 25 посредством связи между блоком 14 беспроводной связи и блоком 24 беспроводной связи. Т.е., зарядный контроллер 25 имеет функцию блока получения коэффициента связности, который получает коэффициент κ связности между передающей мощность катушкой 31 и принимающей мощность катушкой 41.
[0056] Кроме того, после того как интервалы позиционного сдвига Lx, Ly в направлениях X-оси и Y-оси и коэффициент k связности определены, может быть получен промежуток G. В настоящем варианте осуществления промежуток G может быть получен посредством задания, заранее, карты, указывающей соотношение между Lx, Ly, κ и промежутком G в области хранения (не иллюстрирована) блока 33 оценки температуры и затем применения интервалов позиционного сдвига Lx, Ly и κ, полученных в вышеописанной процедуре, к этой карте.
[0057] Поскольку интервалы позиционного сдвига Lx, Ly и промежуток K могут быть получены с помощью вышеописанного способа, поправочный коэффициент C может быть получен из вышеописанной формулы (2). В настоящем варианте осуществления поправочный коэффициент C вычисляется посредством подготовки, заранее, карты соответствия, указывающей соотношение между интервалами позиционного сдвига Lx, Ly, промежутком G и поправочным коэффициентом C, и подстановки каждого числового значения в эту карту соответствия.
[0058] Далее в данном документе соотношение между интервалами позиционного сдвига Lx, Ly, промежутком G и поправочным коэффициентом C будет описано со ссылкой на график, иллюстрированный на фиг. 11, и пояснительный вид, иллюстрированный на фиг. 12.
[0059] Фиг. 11 - это график, иллюстрирующий изменение в поправочном коэффициенте C, полученном при выполнении эксперимента для фактического изменения интервалов позиционного сдвига Lx, Ly и промежутка G. Ссылочный знак q1 указывает поправочный коэффициент C, когда Lx=100 мм, Ly=0 мм и G=100 мм. Фиг. 12 - это пояснительный вид, иллюстрирующий относительное позиционное соотношение между передающей мощность катушкой 31 и принимающей мощность катушкой 41, в котором ссылочный знак q1 на фиг. 11 указывает состояние, когда центр C1 принимающей мощность катушки 41 сдвигается, на 100 мм в положительном направлении X-оси, от центра C2 передающей мощность катушки 31, как иллюстрировано на фиг. 12(a). Как указано ссылочным знаком q1 на фиг. 11, поправочный коэффициент C равен 0,10 в этом случае.
[0060] Аналогично, ссылочный знак q2 на фиг. 11 указывает поправочный коэффициент C, когда Lx=-100 мм, Ly=0 мм и G=100мм, и указывает состояние, когда центр C1 принимающей мощность катушки 41 сдвигается, на 100 мм в отрицательном направлении X-оси, от центра C2 передающей мощность катушки 31, как иллюстрировано на фиг. 12(b). Как указано ссылочным знаком q2 на фиг. 11, поправочный коэффициент C равен 0,15 в этом случае.
[0061] Ссылочный знак q3 на фиг. 11 указывает поправочный коэффициент C, когда Lx=0 мм, Ly=100 мм и G=100 мм, и указывает состояние, когда центр C1 принимающей мощность катушки 41 сдвигается, на 100 мм в направлении Y-оси, от центра C2 передающей мощность катушки 31, как иллюстрировано на фиг. 12(c). Как указано ссылочным знаком q3 на фиг. 11, поправочный коэффициент C равен 0,25 в этом случае.
[0062] Кроме того, ссылочный знак q4 на фиг. 11 указывает поправочный коэффициент C, когда Lx=0 мм, Ly=0 мм и G=150 мм, ссылочный знак q5 указывает поправочный коэффициент, когда Lx=100 мм, Ly=0 мм и G=150 мм, ссылочный знак q6 указывает поправочный коэффициент C, когда Lx=-100 мм, Ly=0 мм и G=150 мм, и ссылочный знак q7 указывает поправочный коэффициент C, когда Lx=0 мм, Ly=100 мм и G=150 мм.
[0063] Как описано выше, поправочный коэффициент C может быть получен посредством применения интервалов позиционного сдвига Lx, Ly и промежутка G к предварительно заданной карте соответствия. Кроме того, каждый из коэффициентов a, b и c формулы (2) ниже может быть получен на основе фактического измеренного значения поправочного коэффициента C. Затем, поправочный коэффициент C может быть вычислен с помощью этих коэффициентов a, b и c.
C=(a*Lx+b*Ly+c)/G2 (2)
Применение такого способа вычисления предоставляет возможность вычислять поправочный коэффициент C очень простым способом для подстановки Lx, Ly и G в формулу вычисления.
[0064] Далее, операция обработки устройства оценки температуры согласно настоящему варианту осуществления будет объяснена со ссылкой на блок-схему последовательности операций, иллюстрированную на фиг. 13. Блок-схема последовательности операций на фиг. 13 иллюстрирует обработку посредством блока 33 оценки температуры, иллюстрированного на фиг. 1, и обработку посредством контроллера 15 передачи мощности.
[0065] Сначала, блок 33 оценки температуры получает данные об интервале плоскостного позиционного сдвига Lx, Ly блока 22 принимающей мощность катушки от блока 12 передающей мощности катушки на этапе a11. Для этой обработки могут быть применены вышеописанные способы, иллюстрированные на фиг. 7 и фиг. 8.
[0066] На этапе a12 блок 33 оценки температуры получает информацию о получаемой мощности Pb и получаемом напряжении Vb в блоке 22 принимающей мощность катушки и электрическом токе I2, протекающем через принимающую мощность катушку 41. Эти данные могут быть получены из обнаруженных значений вольтметра и амперметра (не иллюстрированы), предусмотренных в блоке 22 принимающей мощность катушки.
[0067] На этапе b11 контроллер 15 передачи мощности измеряет выходное напряжение Vinv и выходной ток Iinv инвертора 113 и передает эти данные блоку 33 оценки температуры через блок 14 беспроводной связи и блок 24 беспроводной связи.
[0068] На этапе a13 блок 33 оценки температуры вычисляет соответствующие потери WJB, WVC и WGC мощности на основе различных данных. Как ранее описано, каждая потеря мощности является потерей в обмотке и пропорциональна квадрату электрического тока, и, следовательно, вычисление может быть проведено на основе этого соотношения.
[0069] На этапе a14 вычисляется промежуток G между блоком 12 передающей мощность катушки и блоком 22 принимающей мощность катушки. В этой обработке промежуток G может быть получен посредством использования вышеописанного способа, иллюстрированного на фиг. 9 и фиг. 10.
[0070] На этапе a15 блок 33 оценки температуры получает поправочный коэффициент C для корректировки потери WGC мощности. Т.е., поскольку интервалы позиционного сдвига Lx, Ly в направлении плоскости получаются в обработке этапа a11, а промежуток G получается в обработке этапа a14, поправочный коэффициент C может быть получен с помощью вышеописанного подхода на основе этих числовых значений.
[0071] На этапе a16 блок 33 оценки температуры вычисляет увеличение температуры ΔT блока 22 передающей мощность катушки посредством подстановки поправочного коэффициента C, полученного в вышеописанной обработке, в формулу (1) ниже.
ΔT=A*WJB+B*WVC+C*WGC (1)
[0072] На этапе a17 блок 33 оценки температуры получает температуру Ta окружающей среды для транспортного средства 201 и добавляет увеличение температуры ΔT к этой температуре Ta окружающей среды. Затем, увеличение температуры ΔT регулируется так, чтобы удовлетворять формуле (5) ниже.
Ta+ΔT+Tm ≤ (допустимая температура компонентов) (5)
где Tm является запасом.
[0073] Т.е., когда "Ta+ΔT+Tm" достигает "допустимой температуры компонентов", допустимая мощность Px, которая является допустимым значением мощности, генерируемой в блоке 22 принимающей мощность катушки, задается так, что увеличение температуры ΔT уменьшается. Данные об этой допустимой мощности Px передаются устройству 100 подачи мощности через блок 24 беспроводной связи и блок 14 беспроводной связи.
[0074] Впоследствии, на этапе b12, контроллер 15 передачи мощности регулирует мощность, передаваемую посредством блока 12 передающей мощность катушки, так, что мощность, генерируемая в блоке 22 принимающей мощность катушки, становится в пределах допустимой мощности Px. Таким образом, управление может проводиться так, что температура окружающей среды для блока 22 принимающей мощность катушки не достигает допустимой температуры компонентов.
[0075] Таким образом, устройство оценки температуры согласно настоящему варианту осуществления изменяет, когда позиционное соотношение между передающей мощность катушкой 31, предусмотренной на наземной стороне, и принимающей мощность катушкой 41, предусмотренной в транспортном средстве 201, позиционно сдвигается от нормального позиционного соотношения, вклад в увеличение температуры вследствие потери WGC мощности передающей мощность катушки 31, в соответствии с величиной этого интервала позиционного сдвига. Соответственно, температура окружающей среды для блока 22 принимающей мощность катушки может быть точно оценена без предоставления датчика температуры для измерения температуры окружающей среды для принимающей мощность катушки 41.
[0076] Кроме того, передаваемая устройством 100 подачи мощности мощность может регулироваться так, что температура окружающей среды для блока 22 принимающей мощность катушки не растет до температуры ограничения работы компонентов, и чрезмерное увеличение температуры блока 22 принимающей мощность катушки и электронных компонентов около него может быть предотвращено.
[0077] Кроме того, если управление проводится так, что передаваемая мощность от блока 12 передающей мощность катушки уменьшается, время заряда аккумулятора 28 увеличивается. В настоящем варианте осуществления, когда управление проводится посредством блока 33 оценки температуры, так, чтобы уменьшать передаваемую мощность, информация, указывающая увеличение времени заряда, отображается в блоке 37 оповещения, которая должна быть сообщена пассажиру транспортного средства 201. Таким образом, пассажир транспортного средства 201 может распознавать заранее, что время, необходимое для заряда, будет увеличиваться, и пассажир может иметь чувство безопасности.
[0078] Кроме того, блок 33 оценки температуры получает поправочный коэффициент C на основе интервала позиционного сдвига между передающей мощность катушкой 31 и принимающей мощность катушкой 41 и умножает потерю WGC мощности передающей мощность катушки 31 на поправочный коэффициент C, таким образом, изменяя вклад в увеличение температуры вследствие потери WGC мощности этой передающей мощность катушки 31. Соответственно, температура окружающей среды для блока 22 принимающей мощность катушки может быть оценена более точно.
[0079] Кроме того, получаются интервалы плоскостного позиционного сдвига X, Y, которые являются интервалами позиционного сдвига между передающей мощность катушкой 31 и принимающей мощность катушкой 41, и промежуток G, и поправочный коэффициент C получается на основе этих данных. Кроме того, потеря WGC мощности умножается на этот поправочный коэффициент C, и, кроме того, увеличение температуры ΔT получается из формулы (1), описанной выше. Соответственно, температура окружающей среды для блока 22 принимающей мощность катушки может быть оценена более точно.
[0080] Кроме того, получается коэффициент κ связности между передающей мощность катушкой 31 и принимающей мощность катушкой 41, и промежуток G получается на основе этого коэффициента κ связности и интервалов плоскостного позиционного сдвига Lx, Ly, так что возможно обходиться без датчика 61 промежутка для измерения промежутка G и уменьшать размеры устройства.
[0081] Кроме того, измеряются коэффициенты a, b и c в вышеописанной формуле (2), и, кроме того, величины позиционного сдвига Lx, Ly и промежуток G подставляются в формулу (2), чтобы получать поправочный коэффициент C, так что поправочный коэффициент C может быть точно получен, и, соответственно, увеличение температуры ΔT может быть точно оценено.
[0082] В вышеизложенном устройство оценки температуры и способ оценки температуры для бесконтактного устройства приема мощности согласно настоящему изобретению было объяснено на основе иллюстрированного варианта осуществления, но настоящее изобретение не ограничивается этим. Конфигурация каждого блока может быть заменена любой конфигурацией, имеющей аналогичную функцию.
Список ссылочных знаков
[0083] 11 контроллер мощности
12 блок передающей мощность катушки
13 камера
14 блок беспроводной связи
15 блок передачи мощности
22 блок принимающей мощность катушки.
24 блок беспроводной связи
25 зарядный контроллер
26 выпрямитель
27 реле
28 аккумулятор
29 инвертор
30 мотор
31 передающая мощность катушка
33 блок оценки температуры
35 ферритовая пластина
37 блок оповещения
41 принимающая мощность катушка
42 ферритовая пластина
43 схемная плата
44 схемная плата
45 электрический шкаф
51 датчик расстояния спереди
52 поверхность стены
54 парковочная рамка
61 датчик промежутка
100 устройство подачи мощности
101 система бесконтактной подачи мощности
111 выпрямитель
112 PFC-схема
113 инвертор
200 устройство приема мощности
201 транспортное средство
300 источник AC-мощности
Группа изобретений относится к системам для беспроводной зарядки аккумулятора. Устройство оценки температуры для бесконтактного устройства приема мощности содержит блок получения потери мощности на передающей мощность стороне, блок получения интервала позиционного сдвига и блок оценки температуры. Блок получения интервала позиционного сдвига получает промежуток и интервал плоскостного позиционного сдвига между передающей и принимающей мощность катушками и определяет поправочный коэффициент на основе промежутка и интервала плоскостного позиционного сдвига. Блок оценки температуры оценивает температуру окружающей среды для принимающей мощность катушки на основе предварительно заданного количества формируемого тепла устройства приема мощности и потери мощности передающей катушки. При этом, когда позиционное соотношение между катушками сдвигается от нормального позиционного соотношения, блок оценки температуры изменяет вклад в рост температуры, умножая потерю мощности передающей катушки на поправочный коэффициент. Также заявлен способ оценки температуры для бесконтактного устройства приема мощности. Технический результат заключается в повышении точности оценки температуры окружающей среды для принимающей катушки. 2 н. и 2 з.п. ф-лы, 13 ил.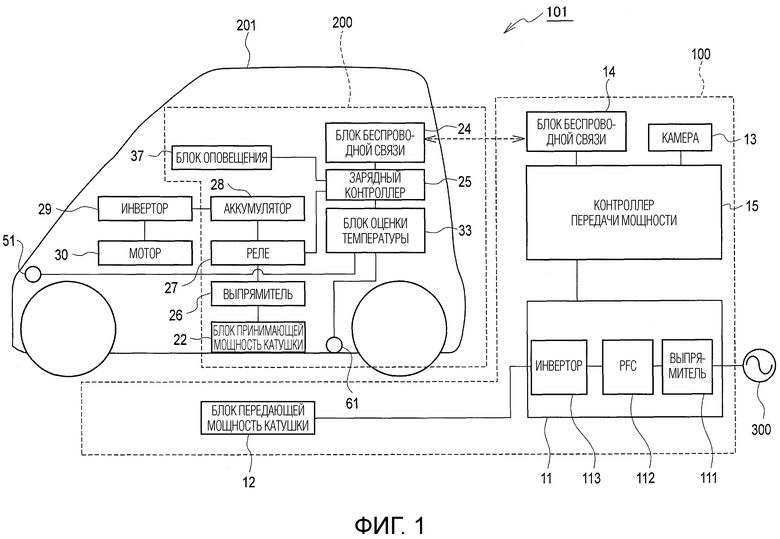
1. Устройство оценки температуры для бесконтактного устройства приема мощности, устройство оценки температуры оценивает температуру окружающей среды для принимающей мощность катушки устройства приема мощности, которое бесконтактным образом принимает мощность, передаваемую от передающей мощность катушки через принимающую мощность катушку, устройство оценки температуры содержит:
блок получения потери мощности на передающей мощность стороне, который получает потерю мощности передающей мощность катушки;
блок получения интервала позиционного сдвига, который получает
промежуток между передающей мощность катушкой и принимающей мощность катушкой и
интервал плоскостного позиционного сдвига между передающей мощность катушкой и принимающей мощность катушкой, и
определяет поправочный коэффициент на основе промежутка и интервала плоскостного позиционного сдвига; и
блок оценки температуры, который оценивает температуру окружающей среды для принимающей мощность катушки на основе предварительно заданного количества формируемого тепла устройства приема мощности и потери мощности передающей мощность катушки, при этом
когда позиционное соотношение между передающей мощность катушкой и принимающей мощность катушкой сдвигается от нормального позиционного соотношения, блок оценки температуры изменяет вклад в рост температуры вследствие потери мощности передающей мощность катушки, умножая потерю мощности передающей мощность катушки на поправочный коэффициент.
2. Устройство оценки температуры для бесконтактного устройства приема мощности по п. 1, дополнительно содержащее:
блок получения коэффициента связности, который получает коэффициент связности между передающей мощность катушкой и принимающей мощность катушкой, при этом
блок получения интервала позиционного сдвига получает промежуток на основе интервала плоскостного позиционного сдвига и коэффициента связности.
3. Устройство оценки температуры для бесконтактного устройства приема мощности по п. 1, в котором
блок получения интервала позиционного сдвига получает интервал позиционного сдвига в направлении X-оси и интервал позиционного сдвига в направлении Y-оси, перпендикулярном X-оси, в качестве интервала плоскостного позиционного сдвига, и дополнительно вычисляет поправочный коэффициент по формуле: C=(a*Lx+b*Ly+c)/G2
где a, b и c являются коэффициентами, G - промежуток между передающей мощность катушкой и принимающей мощность катушкой, а Lx, Ly являются интервалами позиционного сдвига в направлении X-оси и направлении Y-оси.
4. Способ оценки температуры для бесконтактного устройства приема мощности, причем в способе оценки температуры оценивают температуру окружающей среды для принимающей мощность катушки устройства приема мощности, которое бесконтактным образом принимает мощность, передаваемую от передающей мощность катушки через принимающую мощность катушку, при этом способ оценки температуры содержит этапы, на которых:
получают потерю мощности передающей мощность катушки;
получают
промежуток между передающей мощность катушкой и принимающей мощность катушкой и
интервал плоскостного позиционного сдвига между передающей мощность катушкой и принимающей мощность катушкой, и
определяют поправочный коэффициент на основе промежутка и интервала плоскостного позиционного сдвига;
оценивают температуру окружающей среды для принимающей мощность катушки на основе предварительно заданного количества формируемого тепла для устройства приема мощности и потери мощности передающей мощность катушки; и
изменяют вклад в рост температуры вследствие потери мощности передающей мощность катушки, умножая потерю мощности передающей мощность катушки на поправочный коэффициент, в случае, когда позиционное соотношение между передающей мощность катушкой и принимающей мощность катушкой сдвигается от нормального позиционного соотношения.
| JP 2013135572 A, 08.07.2013 | |||
| JP 2013192411 A, 26.09.2013 | |||
| US 2014084856 A1, 27.03.2014 | |||
| Регулятор номера ленты для чесальных и ленточных машин | 1959 |
|
SU124852A2 |

