Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу обнаружения позиции катушки для системы бесконтактной подачи мощности и к устройству приема мощности.
Уровень техники
[0002] В системе бесконтактной подачи мощности, которая бесконтактно подает мощность в аккумулятор, смонтированный в электротранспортном средстве и т.п., катушка для передачи мощности, предоставленная на земле, и катушка для приема мощности, смонтированная в транспортном средстве, выполнены с возможностью быть обращенными друг к другу, и катушка для передачи мощности возбуждается, чтобы подавать мощность в катушку для приема мощности. В такой системе бесконтактной подачи мощности, катушка для приема мощности должна совмещаться таким образом, что она обращена к катушке для передачи мощности, и система, раскрытая в патентном документе 1, традиционно известна.
[0003] В патентном документе 1, катушка для передачи мощности возбуждается при меньшем напряжении, чем нормальное напряжение источника мощности, и мощность, принимаемая посредством катушки для приема мощности, определяется, чтобы определять то, присутствует или нет катушка для приема мощности в требуемой позиции относительно катушки для передачи мощности.
Список библиографических ссылок
Патентные документы
[0004] Патентный документ 1. Патент (Япония) номер 4849190
Сущность изобретения
[0005] В традиционном примере, раскрытом в патентном документе 1, реле предоставляются перед аккумулятором и схемой приведения в действие. Когда катушка для приема мощности должна совмещаться, реле должны выключаться, чтобы точно определять напряжение, которое должно определяться в катушке для приема мощности.
[0006] Настоящее изобретение осуществлено для того, чтобы разрешать традиционную проблему, описанную выше, и его цель заключается в том, чтобы предоставлять способ обнаружения позиции катушки для системы бесконтактной подачи мощности и устройство приема мощности, которые обеспечивают точное совмещение катушки для приема мощности без переключения реле во время совмещения.
[0007] В способе обнаружения позиции катушки согласно одному из аспектов настоящего изобретения, когда релейная схема включена, позиция катушки обнаруживается на основе переменного напряжения, определенного до выпрямительной схемы, выполненной с возможностью выпрямлять мощность переменного тока, принимаемую посредством катушки для приема мощности, релейной схемы, предоставленной между аккумулятором и выпрямительной схемой, а также схемы приведения в действие, соединенной с выпрямительной схемой. Кроме того, когда релейная схема выключена, позиция катушки обнаруживается на основе постоянного напряжения, определенного после выпрямительной схемы.
[0008] Устройство приема мощности согласно одному из аспектов настоящего изобретения включает в себя схему обнаружения позиции катушки, выполненную с возможностью обнаруживать позицию катушки для приема мощности посредством определения напряжения мощности, принимаемой посредством катушки для приема мощности, когда катушка для передачи мощности возбуждается. Схема обнаружения позиции катушки обнаруживает позицию катушки для приема мощности на основе переменного напряжения, определенного до выпрямительной схемы, когда релейная схема включена, и обнаруживает позицию катушки для приема мощности на основе постоянного напряжения, определенного после выпрямительной схемы, когда релейная схема выключена.
Преимущества изобретения
[0009] В настоящем изобретении, можно точно совмещать катушку для приема мощности без переключения релейной схемы во время совмещения.
Краткое описание чертежей
[0010] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы бесконтактной подачи мощности с использованием способа обнаружения позиции катушки согласно одному варианту осуществления настоящего изобретения.
Фиг. 2 является принципиальной схемой, иллюстрирующей выпрямитель и периферийные устройства выпрямителя в системе бесконтактной подачи мощности с использованием способа обнаружения позиции катушки согласно одному варианту осуществления настоящего изобретения.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки, выполняемые посредством устройства подачи мощности в способе обнаружения позиции катушки согласно одному варианту осуществления настоящего изобретения.
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки, выполняемые посредством устройства приема мощности, когда транспортное средство движется, в способе обнаружения позиции катушки согласно одному варианту осуществления настоящего изобретения.
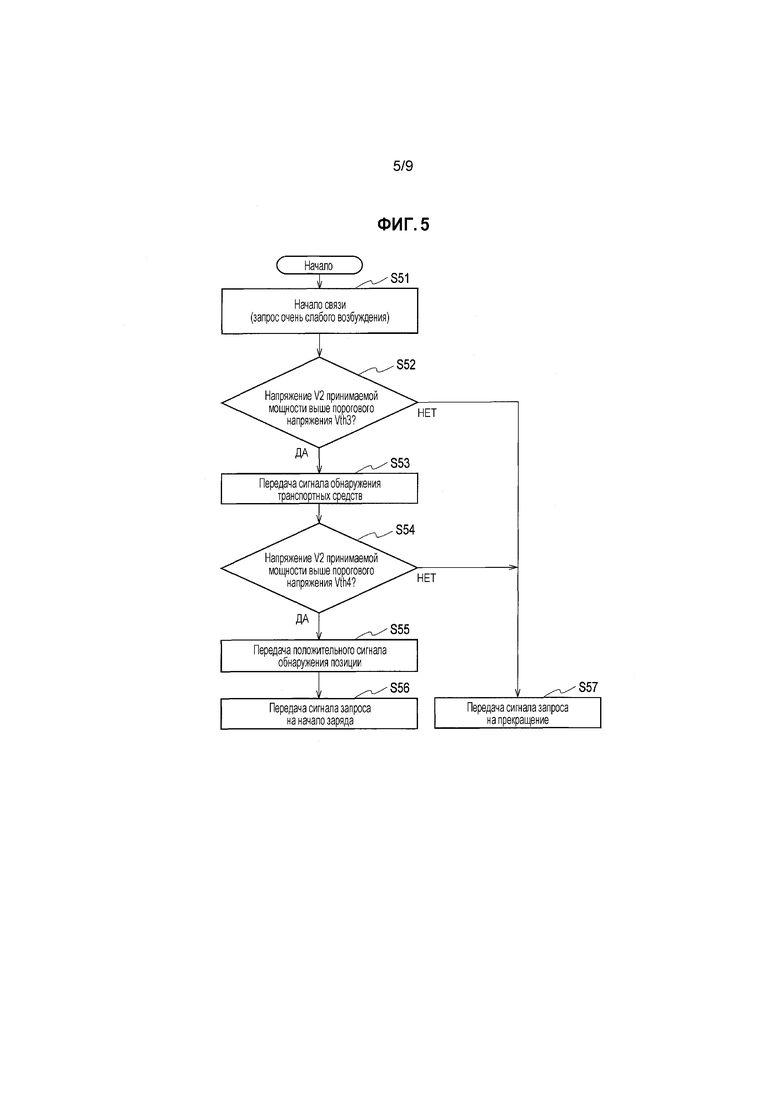
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки, выполняемые посредством устройства приема мощности, когда транспортное средство остановлено, в способе обнаружения позиции катушки согласно одному варианту осуществления настоящего изобретения.
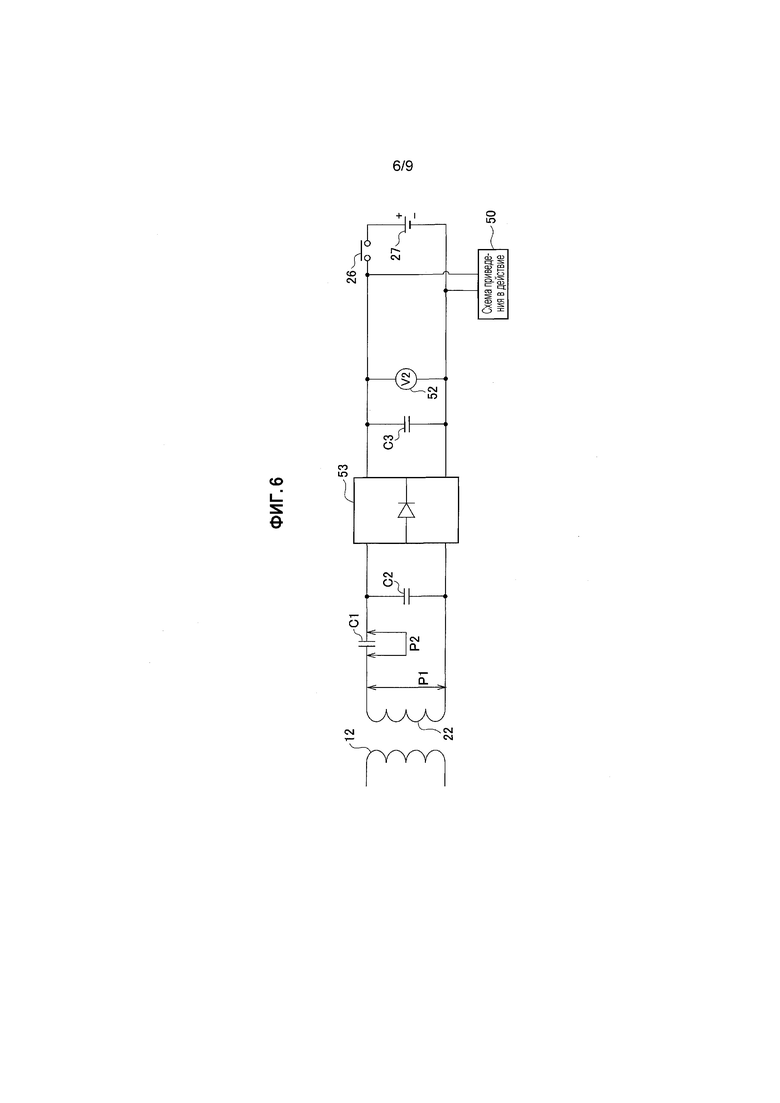
Фиг. 6 является пояснительным видом, иллюстрирующим первый модифицированный пример местоположения установки первого вольтметра.
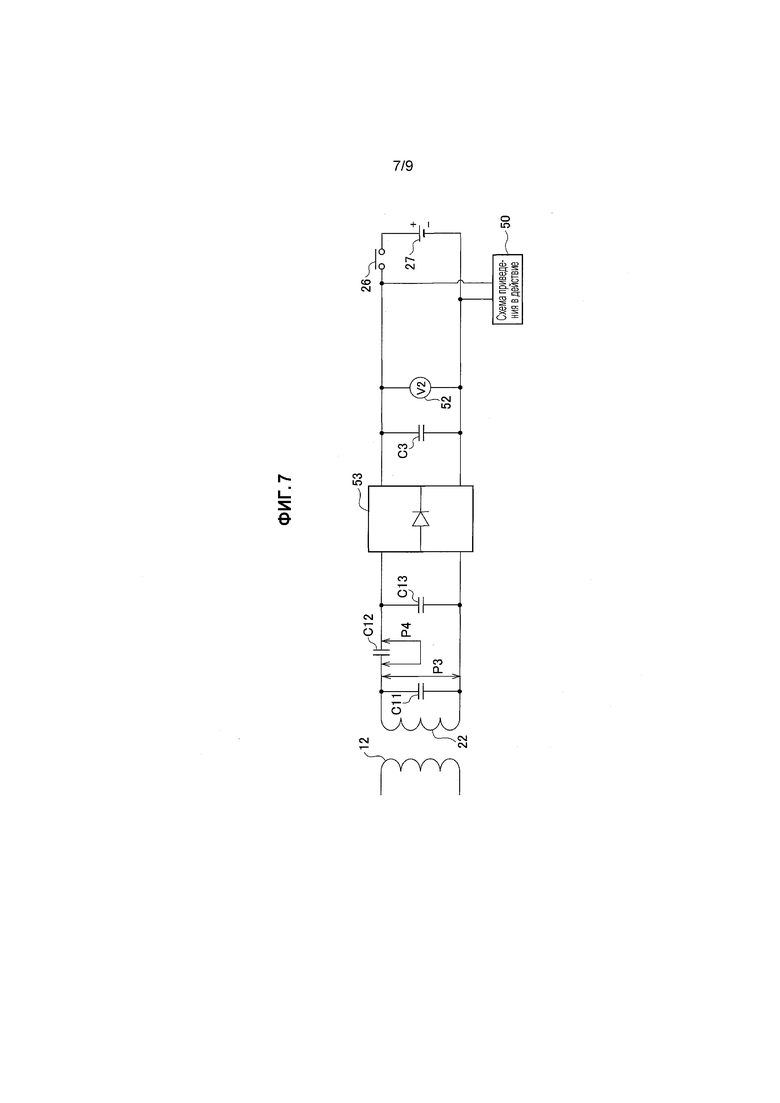
Фиг. 7 является пояснительным видом, иллюстрирующим второй модифицированный пример местоположения установки первого вольтметра.
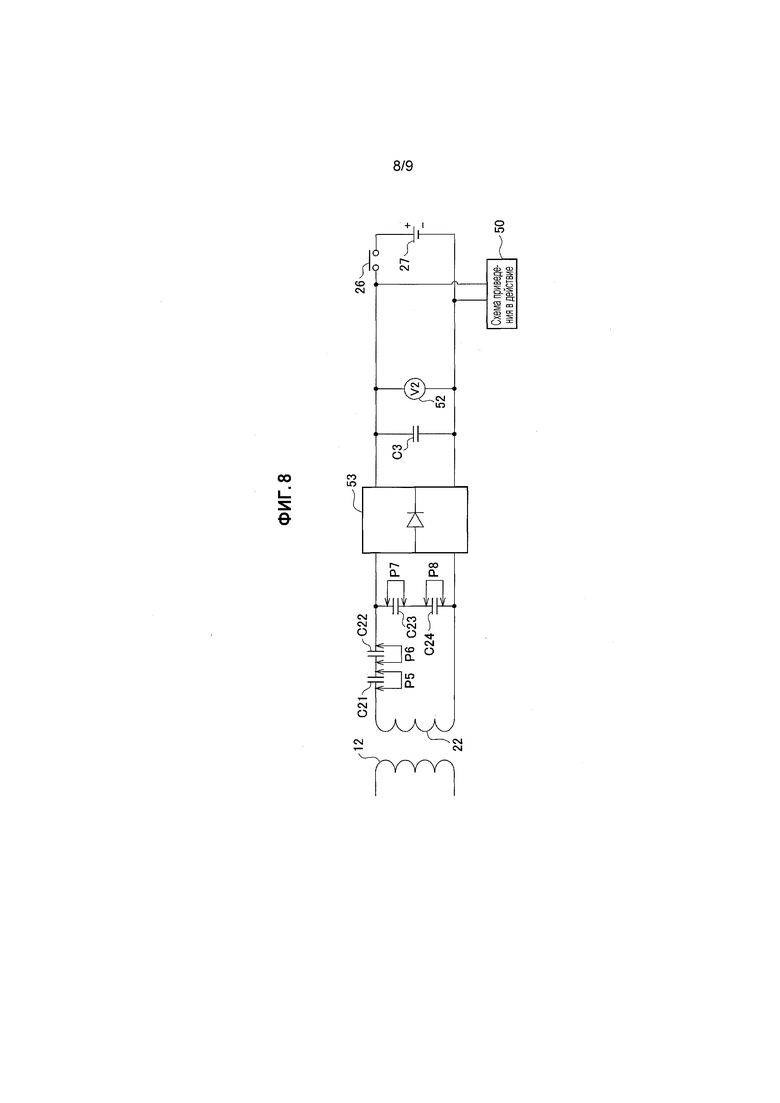
Фиг. 8 является пояснительным видом, иллюстрирующим третий модифицированный пример местоположения установки первого вольтметра.
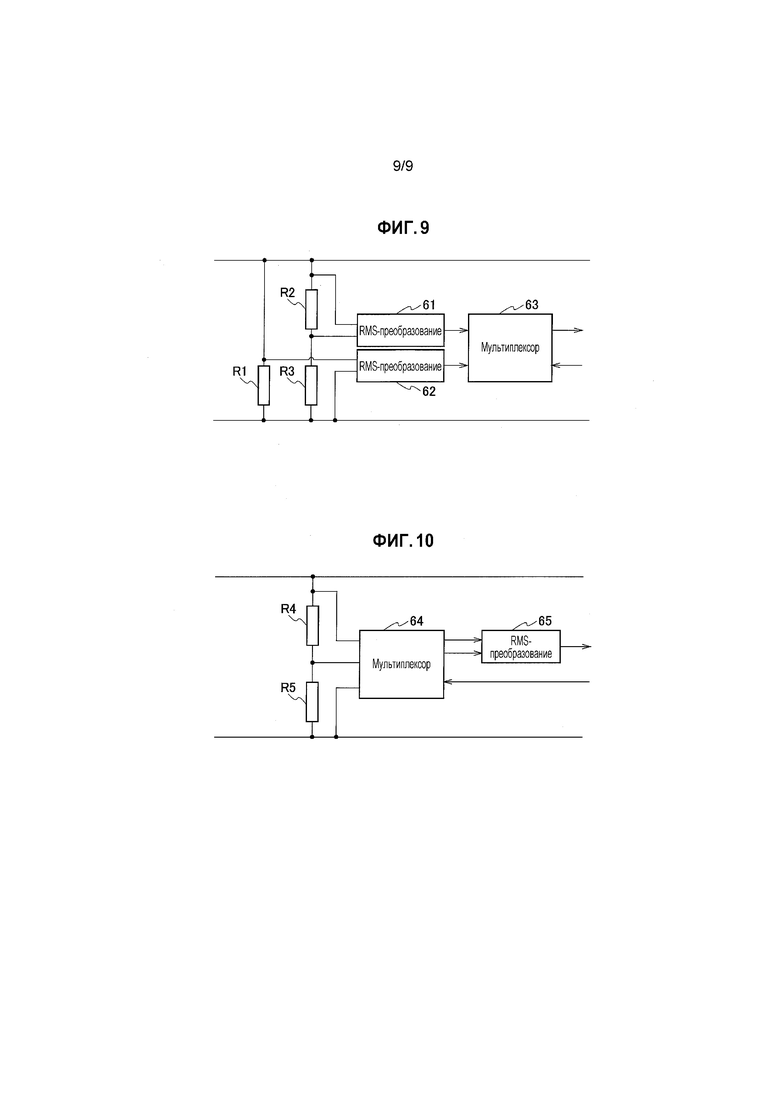
Фиг. 9 является пояснительным видом, иллюстрирующим первый пример деления определенного напряжения, выполняемого, когда напряжение определяется посредством первого вольтметра или второго вольтметра.
Фиг. 10 является пояснительным видом, иллюстрирующим второй пример деления определенного напряжения, выполняемого, когда напряжение определяется посредством первого вольтметра или второго вольтметра.
Подробное описание вариантов осуществления
[0011] Ниже описывается вариант осуществления настоящего изобретения со ссылкой на чертежи.
Конфигурация системы бесконтактной подачи мощности
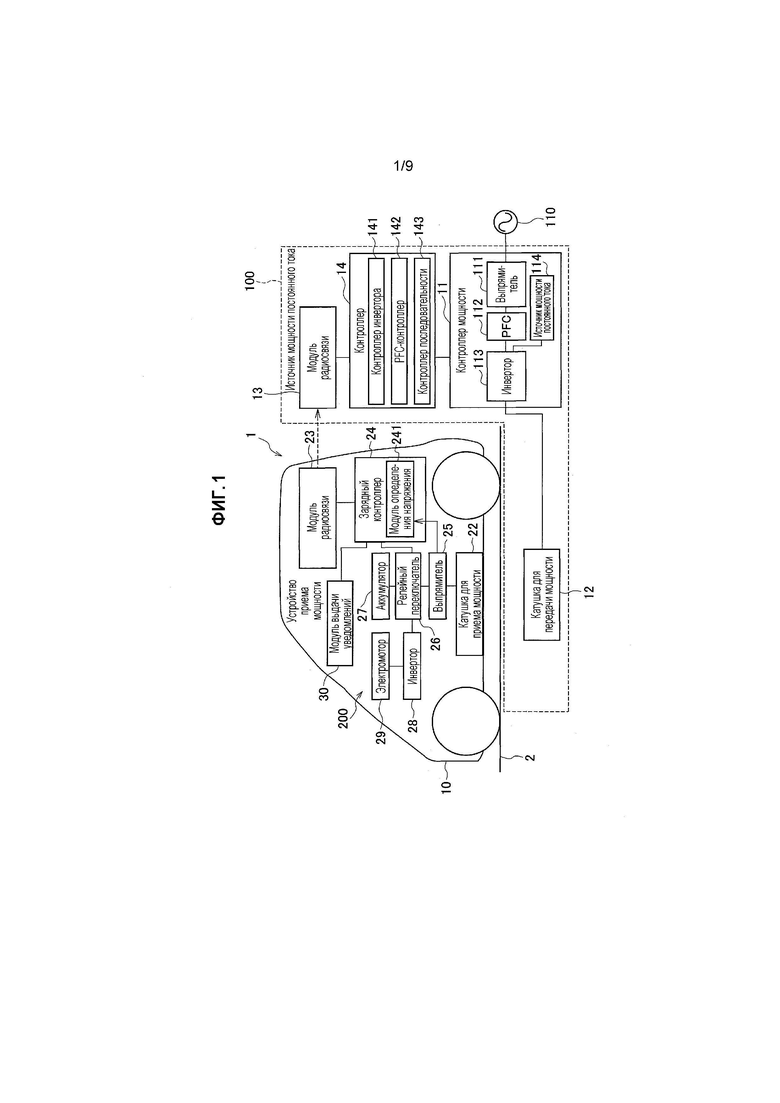
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы бесконтактной подачи мощности с использованием способа обнаружения позиции катушки согласно варианту осуществления. Как проиллюстрировано на фиг. 1, система 1 бесконтактной подачи мощности включает в себя устройство 100 подачи мощности, которое представляет собой модуль на стороне земли, и устройство 200 приема мощности, которое представляет собой модуль на стороне транспортного средства. Система 1 бесконтактной подачи мощности бесконтактно подает мощность из устройства 100 подачи мощности, расположенного в станции подачи мощности и т.п., в устройство 200 приема мощности, смонтированное в транспортном средстве 10, таком как электротранспортное средство или гибридный автомобиль, чтобы заряжать аккумулятор, смонтированный в транспортном средстве.
[0012] Устройство 100 подачи мощности включает в себя катушку 12 для передачи мощности, расположенную в месте 2 для парковки около станции подачи мощности. Между тем, устройство 200 приема мощности включает в себя катушку 22 для приема мощности, установленную на нижней поверхности транспортного средства 10. Катушка 22 для приема мощности располагается таким образом, что она обращена к катушке 12 для передачи мощности, когда транспортное средство 10 остановлено в предварительно определенной позиции (в позиции возможности подачи мощности, которая описывается ниже) в месте 2 для парковки.
[0013] Катушка 12 для передачи мощности включает в себя первичную катушку, изготовленную из электропроводящих проводов, и передает мощность в катушку 22 для приема мощности. Катушка 22 для приема мощности включает в себя вторичную катушку, аналогично изготовленную из электропроводящих проводов, и принимает мощность из катушки 12 для передачи мощности. Мощность может бесконтактно подаваться из катушки 12 для передачи мощности в катушку 22 для приема мощности посредством электромагнитной индукции между катушками.
[0014] Устройство 100 подачи мощности на стороне земли включает в себя контроллер 11 мощности, катушку 12 для передачи мощности, модуль 13 радиосвязи и контроллер 14.
[0015] Контроллер 11 мощности представляет собой схему, которая преобразует мощность переменного тока, принимаемую из источника 110 мощности переменного тока, в высокочастотную мощность переменного тока, и передает высокочастотную мощность переменного тока в катушку 12 для передачи мощности. Кроме того, контроллер 11 мощности включает в себя выпрямитель 111, PFC-схему 112, источник 114 мощности постоянного тока и инвертор 113.
[0016] Выпрямитель 111 представляет собой схему, которая электрически соединяется с источником 110 мощности переменного тока и выпрямляет мощность переменного тока, выводимую из источника 110 мощности переменного тока. PFC-схема 112 представляет собой схему для повышения коэффициента мощности посредством придания определенной формы сигналу мощности, выводимому из выпрямителя 111 (коррекции коэффициента мощности), и соединяется между выпрямителем 111 и инвертором 113.
[0017] Инвертор 113 включает в себя схему PWM-управления, сформированную из переключающего элемента, такого как IGBT. Инвертор 113 преобразует мощность постоянного тока в мощность переменного тока на основе сигнала управления переключением и подает мощность переменного тока в катушку 12 для передачи мощности. Источник 114 мощности постоянного тока выводит постоянное напряжение, используемое для того, чтобы очень слабо возбуждать (подробности описываются ниже) катушку 12 для передачи мощности.
[0018] Модуль 13 радиосвязи выполняет двунаправленную связь с модулем 23 радиосвязи, предоставленным на стороне транспортного средства 10.
[0019] Контроллер 14 управляет всем устройством 100 подачи мощности и включает в себя контроллер 141 инвертора, PFC-контроллер 142 и контроллер 143 последовательности. Контроллер 14 выполняет обработку определения позиций для парковки, когда транспортное средство 10 должно парковаться в месте 2 для парковки. В этом случае, PFC-контроллер 142 формирует инструкцию мощности возбуждения для катушки 12 для передачи мощности, и контроллер 141 инвертора формирует инструкцию частоты и нагрузку для мощности возбуждения, чтобы управлять инвертором 113. Контроллер 14 за счет этого передает мощность для позиции определения парковки из катушки 12 для передачи мощности в катушку 22 для приема мощности. Как описано ниже, когда обработка определения позиций для парковки выполняется, катушка 12 для передачи мощности очень слабо или слабо возбуждается (в обоих случаях, катушка 12 для передачи мощности возбуждается более слабо, чем при нормальном заряде) для того, чтобы передавать мощность для определения позиций для парковки. Кроме того, контроллер 143 последовательности обменивается информацией последовательности с устройством 200 приема мощности через модуль 13 радиосвязи.
[0020] Между тем, устройство 200 приема мощности на стороне транспортного средства 10 включает в себя катушку 22 для приема мощности, модуль 23 радиосвязи, зарядный контроллер 24, выпрямитель 25, релейный переключатель 26 (релейную схему), аккумулятор 27, инвертор 28, электромотор 29 и модуль 30 выдачи уведомлений.
[0021] Катушка 22 для приема мощности располагается в такой позиции, что катушка 22 для приема мощности расположена непосредственно над катушкой 12 для передачи мощности таким образом, что она обращена к ней, и расстояние до катушки 12 для передачи мощности составляет предварительно определенное значение, когда транспортное средство 10 паркуется в предварительно определенной позиции остановки в месте 2 для парковки.
[0022] Модуль 23 радиосвязи выполняет двунаправленную связь с модулем 13 радиосвязи, предоставленным на стороне устройства 100 подачи мощности.
[0023] Зарядный контроллер 24 представляет собой контроллер для управления зарядом аккумулятора 27 и включает в себя модуль 241 определения напряжения. В частности, зарядный контроллер 24 выполняет обработку определения позиций для парковки, когда транспортное средство 10 должно парковаться в месте 2 для парковки. В этом случае, модуль 241 определения напряжения отслеживает мощность, принимаемую в катушке 22 для приема мощности. Затем модуль 241 определения напряжения обнаруживает позицию катушки 22 для приема мощности на основе напряжения мощности, принимаемой посредством катушки 22 для приема мощности, когда катушка 12 для передачи мощности возбуждается. В частности, зарядный контроллер 24 имеет функцию схемы обнаружения позиции катушки, которая обнаруживает позицию катушки 22 для приема мощности посредством определения напряжения мощности, принимаемой посредством катушки 22 для приема мощности, когда катушка 12 для передачи мощности возбуждается. Ниже описываются подробности обработки определения позиций для парковки.
Кроме того, зарядный контроллер 24 управляет модулем 23 радиосвязи, модулем 30 выдачи уведомлений, релейным переключателем 26 и т.п. и передает сигнал, указывающий начало заряда, в контроллер 14 устройства 100 подачи мощности через модуль 23 радиосвязи.
[0024] Выпрямитель 25 соединяется с катушкой 22 для приема мощности. Выпрямитель 25 выпрямляет мощность переменного тока, принимаемую посредством катушки 22 для приема мощности, в мощность постоянного тока и выводит мощность постоянного тока в аккумулятор 27 или инвертор 28. Ниже описываются подробности выпрямителя 25 со ссылкой на фиг. 2.
[0025] Релейный переключатель 26 может включаться и отключаться посредством управления зарядным контроллером 24. Кроме того, выключение релейного переключателя 26 может электрически отделять аккумулятор 27 от выпрямителя 25. Аккумулятор 27 формируется посредством соединения нескольких вторичных элементов и представляет собой источник мощности транспортного средства 10.
[0026] Инвертор 28 включает в себя схему PWM-управления, сформированную из переключающего элемента, такого как IGBT. Инвертор 28 преобразует мощность постоянного тока, выводимую из аккумулятора 27, в мощность переменного тока на основе сигнала управления переключением и подает мощность переменного тока в электромотор 29.
[0027] Электромотор 29 формируется, например, из электромотора трехфазного переменного тока и используется в качестве источника приведения в движение для приведения в движение транспортного средства 10.
[0028] Модуль 30 выдачи уведомлений включает в себя лампу аварийной сигнализации, дисплей или динамик навигационной системы и т.п. и выводит свет, изображение, аудиоголос и т.п. пользователю на основе управления зарядным контроллером 24.
[0029] Вышеуказанная конфигурация обеспечивает возможность системе 1 бесконтактной подачи мощности передавать и принимать высокочастотную мощность в бесконтактном состоянии посредством электромагнитной индукции между катушкой 12 для передачи мощности и катушкой 22 для приема мощности. В частности, подача мощности в катушку 12 для передачи мощности вызывает магнитную связь между катушкой 12 для передачи мощности и катушкой 22 для приема мощности, и мощность в силу этого подается из катушки 12 для передачи мощности в катушку 22 для приема мощности.
[0030] Описание очень слабого возбуждения и слабого возбуждения
Когда транспортное средство 10 должно парковаться в месте 2 для парковки, и бесконтактная подача мощности должна выполняться, система 1 бесконтактной подачи мощности согласно варианту осуществления выполняет обработку определения позиций для парковки, чтобы определять то, достигает или нет транспортное средство 10 позиции для парковки, в которой подача мощности является возможной. В нижеприведенном описании, позиция для парковки, в которой мощность, передаваемая посредством катушки 12 для передачи мощности, может приниматься посредством катушки 22 для приема мощности и подаваться в аккумулятор 27, упоминается как "позиция возможности подачи мощности". В частности, когда транспортное средство 10 паркуется в позиции возможности подачи мощности в месте 2 для парковки, катушка 12 для передачи мощности и катушка 22 для приема мощности находятся в позициях, обращенных друг к другу. Подробно, коэффициент связи между катушкой 12 для передачи мощности и катушкой 22 для приема мощности достигает определенного коэффициента связи (далее называемого "допустимым коэффициентом связи"). Здесь, "коэффициент связи" означает количественное отношение магнитного потока, связанного с катушкой 22 для приема мощности, к магнитному потоку, выводимому посредством возбуждения катушки 12 для передачи мощности. Соответственно, коэффициент связи является наибольшим, когда катушка 12 для передачи мощности и катушка 22 для приема мощности непосредственно обращены друг к другу. Кроме того, "допустимый коэффициент связи" означает минимальный коэффициент связи, требуемый для того, чтобы выполнять бесконтактную подачу мощности.
[0031] При обработке определения позиций для парковки, когда система 1 бесконтактной подачи мощности обнаруживает то, что транспортное средство 10 приближается к позиции возможности подачи мощности, система 1 бесконтактной подачи мощности подает очень слабую мощность в катушку 12 для передачи мощности в качестве мощности для определения и очень слабо возбуждает катушку 12 для передачи мощности. После этого, когда напряжение мощности, принимаемой посредством катушки 22 для приема мощности и определенной посредством первого вольтметра 51, превышает предварительно установленное первое пороговое напряжение Vth1, в то время как катушка 12 для передачи мощности очень слабо возбуждается, система 1 бесконтактной подачи мощности подает слабую мощность, большую вышеуказанной очень слабой мощности, в катушку 12 для передачи мощности для того, чтобы слабо возбуждать катушку 12 для передачи мощности. Например, предположим случай, в котором транспортное средство 10 приближается к позиции возможности подачи мощности в месте 2 для парковки, и катушка 22 для приема мощности в силу этого частично перекрывает катушку 12 для передачи мощности, что приводит к тому, что напряжение формируется в катушке 22 для приема мощности. В этом случае, когда напряжение достигает первого порогового напряжения Vth1, система 1 бесконтактной подачи мощности переключает возбуждение катушки 12 для передачи мощности с очень слабого возбуждения на слабое возбуждение. Кроме того, предположим случай, в котором транспортное средство остановлено, и релейный переключатель 26 выключен. В этом случае, когда напряжение, определенное посредством второго вольтметра 52, превышает третье пороговое напряжение Vth3, система 1 бесконтактной подачи мощности слабо возбуждает катушку 12 для передачи мощности. Ниже описывается причина для отдельного использования первого вольтметра 51 и второго вольтметра 52 в зависимости от ситуации.
[0032] Когда катушка 12 для передачи мощности слабо возбуждается, и затем напряжение, определенное посредством первого вольтметра 51 превышает предварительно установленное второе пороговое напряжение Vth2, система 1 бесконтактной подачи мощности определяет то, что транспортное средство 10 достигает позиции возможности подачи мощности. Другими словами, система 1 бесконтактной подачи мощности определяет то, что коэффициент связи между катушкой 12 для передачи мощности и катушкой 22 для приема мощности достигает допустимого коэффициента связи. Кроме того, в случае если транспортное средство остановлено, и релейный переключатель 26 выключен, когда напряжение, определенное посредством второго вольтметра 52, выше четвертого порогового напряжения Vth4, система 1 бесконтактной подачи мощности определяет то, что транспортное средство 10 достигает позиции возможности подачи мощности. Ниже описывается причина переключения возбуждения катушки 12 для передачи мощности с очень слабого возбуждения на слабое возбуждение.
[0033] Когда транспортное средство 10 приближается к позиции возможности подачи мощности, возникают риски того, что человек приближается к катушке 12 для передачи мощности, установленной в соответствующей позиции в месте 2 для парковки, и того, что посторонний металлический объект размещен около катушки 12 для передачи мощности. Поскольку человеческое тело и посторонний объект могут затрагиваться, когда катушка 12 для передачи мощности возбуждается, желательно возбуждать катушку 12 для передачи мощности максимально возможно слабо. Соответственно, когда транспортное средство 10 присутствует в позиции на большом расстоянии от места 2 для парковки, катушка 12 для передачи мощности очень слабо возбуждается.
[0034] Между тем, когда катушка 12 для передачи мощности очень слабо возбуждается, напряжение мощности, принимаемой посредством катушки 22 для приема мощности, которое составляет определенное напряжение, является очень низким. Соответственно, затруднительно точно измерять напряжение, сформированное в катушке 22 для приема мощности, посредством использования недорогого устройства определения, которое, в общем, используется. Устройство определения с улучшенными рабочими характеристиками требуется для этого измерения. Проблема необходимости устройства определения с улучшенными рабочими характеристиками исключается посредством переключения возбуждения с очень слабого возбуждения на слабое возбуждение, когда напряжение принимаемой мощности достигает первого порогового напряжения Vth1. Следует отметить, что когда возбуждение переключается с очень слабого возбуждения на слабое возбуждение, транспортное средство 10 находится близко к позиции возможности подачи мощности места 2 для парковки. Соответственно, имеется только небольшая вероятность возникновения проблем, таких как приближение человека и размещение постороннего металлического объекта.
[0035] Описание измерения напряжения принимаемой мощности
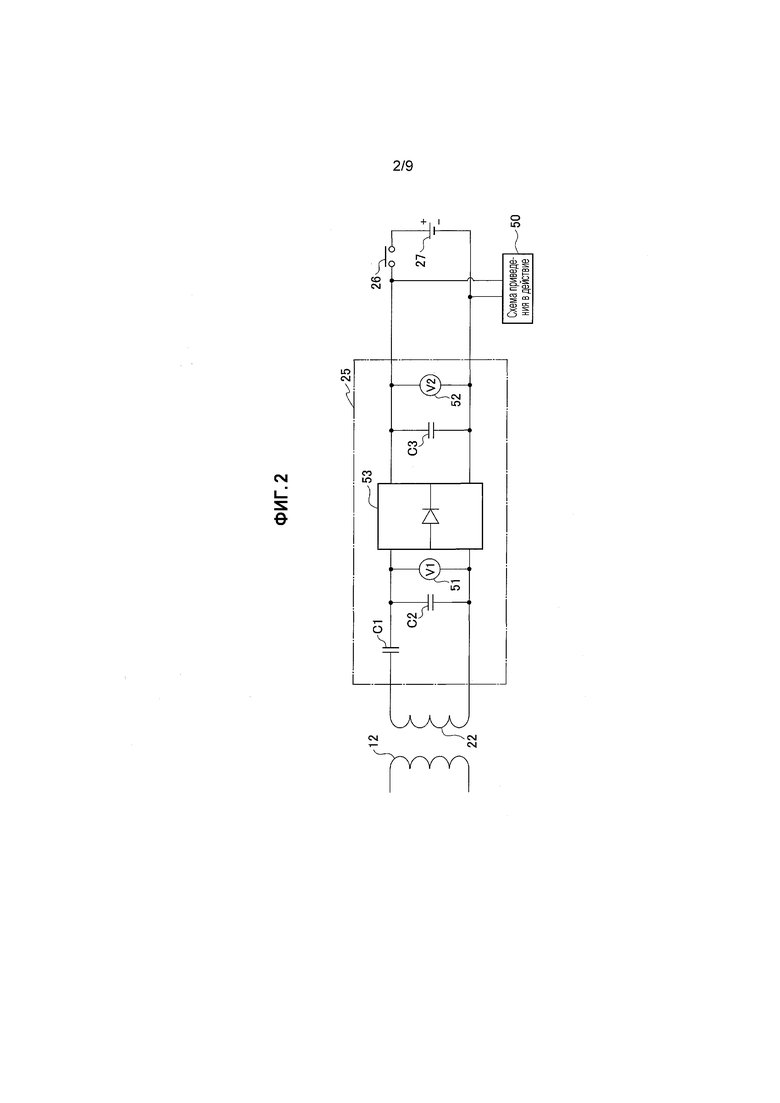
Далее описывается измерение напряжения мощности, принимаемой посредством катушки 22 для приема мощности, со ссылкой на принципиальную схему, проиллюстрированную на фиг. 2. Фиг. 2 является принципиальной схемой, иллюстрирующей подробности выпрямителя 25, проиллюстрированного на фиг. 1, и периферийных устройств выпрямителя 25. Как проиллюстрировано на фиг. 2, выпрямитель 25 включает в себя выпрямительную схему 53, конденсаторы C1-C3, первый вольтметр 51 и второй вольтметр 52. Катушка 22 для приема мощности соединяется с входными контактными выводами выпрямительной схемы 53 через конденсаторы C1 и C2. Выпрямительная схема 53 формируется, например, из диодной мостовой схемы и преобразует переменное напряжение мощности, принимаемой посредством катушки 22 для приема мощности, в постоянное напряжение. Кроме того, первый вольтметр 51, который измеряет переменное напряжение мощности, принимаемой посредством катушки 22 для приема мощности, предоставляется между входными контактными выводами (до) выпрямительной схемы 53.
[0036] Между тем, второй вольтметр 52, который измеряет постоянное напряжение, выводимое посредством выпрямительной схемы 53, предоставляется между выходными контактными выводами (после) выпрямительной схемы 53. Кроме того, сглаживающий конденсатор C3 соединяется с выходными контактными выводами выпрямительной схемы 53 и также соединяется с аккумулятором 27 через релейный переключатель 26. Кроме того, схема 50 приведения в действие соединяется до релейного переключателя 26. Схема 50 приведения в действие соответствует инвертору 28 и электромотору 29 на фиг. 1. Определяемые данные первого вольтметра 51 и определяемые данные второго вольтметра 52 выводятся в модуль 241 определения напряжения, проиллюстрированный на фиг. 1.
[0037] Кроме того, в варианте осуществления, когда обработка определения позиций для парковки выполняется при том, что катушка 12 для передачи мощности очень слабо возбуждается и слабо возбуждается, напряжение определяется с помощью переключения вольтметра, который должен использоваться, между первым вольтметром 51 и вторым вольтметром 52. В частности, когда транспортное средство 10 остановлено, и релейный переключатель 26 выключен, используется напряжение (постоянное напряжение), определенное посредством второго вольтметра 52. Между тем, когда релейный переключатель 26 включен, и транспортное средство 10 движется, используется напряжение (переменное напряжение), определенное посредством первого вольтметра 51.
[0038] Ниже приводится описание причины переключения вольтметра, который должен использоваться, между первым вольтметром 51 и вторым вольтметром 52 в зависимости от того, движется транспортное средство 10 или остановлено.
Когда транспортное средство 10 движется, релейный переключатель 26 включается для того, чтобы подавать мощность в схему 50 приведения в действие. Соответственно, напряжение аккумулятора 27 прикладывается ко второму вольтметру 52. Таким образом, когда катушка 12 для передачи мощности очень слабо возбуждается или слабо возбуждается, и напряжение мощности, принимаемой посредством катушки 22 для приема мощности, измеряется посредством второго вольтметра 52, напряжение мощности, принимаемой посредством катушки 22 для приема мощности, суммируется с напряжением аккумулятора 27. Поскольку напряжение мощности, принимаемой посредством катушки 22 для приема мощности, намного меньше выходного напряжения аккумулятора 27, затруднительно точно определять напряжение, принимаемое посредством катушки 22 для приема мощности, посредством использования второго вольтметра 52.
[0039] Между тем, в первом вольтметре 51, предоставленном до выпрямительной схемы 53, только напряжение мощности, принимаемой посредством катушки 22 для приема мощности, формируется, и выходное напряжение аккумулятора 27 не прикладывается к нему. Соответственно, когда релейный переключатель 26 включен, модуль 241 определения напряжения, проиллюстрированный на фиг. 1, измеряет напряжение, определенное посредством первого вольтметра 51, и выполняет обработку определения позиций для парковки посредством использования измеренного напряжения.
[0040] Когда транспортное средство 10 остановлено, релейный переключатель 26 выключен, и аккумулятор 27 электрически отделен от второго вольтметра 52. Кроме того, напряжение, заряженное в сглаживающем конденсаторе C3, разряжается посредством непроиллюстрированного разрядного устройства. Соответственно, когда катушка 12 для передачи мощности очень слабо возбуждается или слабо возбуждается, напряжение мощности, принимаемой посредством катушки 22 для приема мощности, может измеряться посредством использования второго вольтметра 52.
[0041] Кроме того, поскольку релейный переключатель 26 выключен, и сглаживающий конденсатор C3 разряжается, когда транспортное средство 10 остановлено, изменения состояний заряда конденсаторов C1 и C2 и температуры диода, используемого в выпрямительной схеме 53, приводят к тому, что напряжение, сформированное на входных контактных выводах выпрямителя 25, является нестабильным. Таким образом, точное измерение напряжения не может выполняться посредством измерения напряжения мощности, принимаемой посредством катушки 22 для приема мощности, с помощью первого вольтметра 51. Соответственно, когда транспортное средство 10 остановлено, и релейный переключатель 26 выключен, обработка определения позиций для парковки выполняется посредством использования напряжения, определенного посредством второго вольтметра 52.
[0042] Как описано выше, в варианте осуществления, напряжение измеряется при переключении вольтметра, который должен использоваться, между первым вольтметром 51 и вторым вольтметром 52 в зависимости от того, движется транспортное средство 10 (релейный переключатель 26 включен) или остановлено (релейный переключатель выключен), и это повышает точность определения напряжения и обеспечивает возможность точного выполнения обработки определения позиций для парковки.
[0043] Описание операций в варианте осуществления
Далее описываются операции системы бесконтактной подачи мощности согласно варианту осуществления со ссылкой на блок-схемы последовательности операций способа, проиллюстрированные на фиг. 3-5. Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки, выполняемые посредством устройства 100 подачи мощности, предоставленного на стороне земли. Фиг. 4 и 5 являются блок-схемами последовательности операций способа, иллюстрирующими этапы обработки, выполняемые посредством устройства 200 приема мощности, предоставленного в транспортном средстве 10. Фиг. 4 иллюстрирует этапы обработки, выполняемые, когда транспортное средство движется, и фиг. 5 иллюстрирует этапы обработки, выполняемые, когда транспортное средство остановлено.
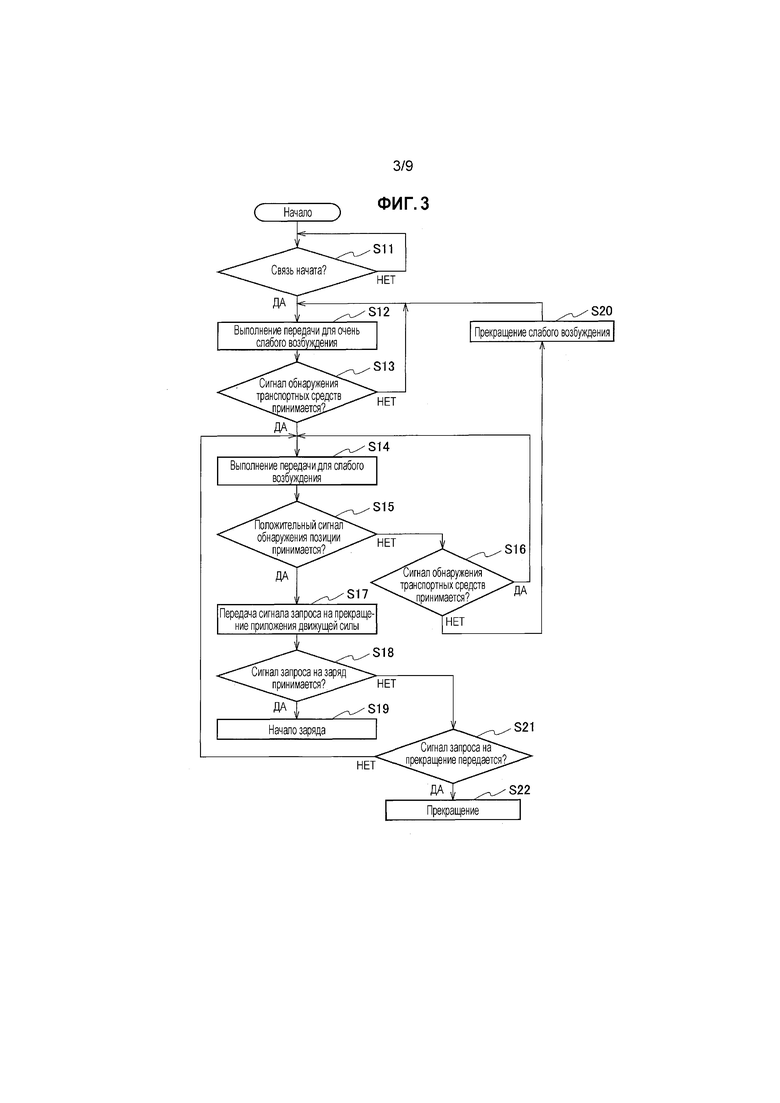
[0044] Во-первых, описываются этапы обработки устройства 100 подачи мощности со ссылкой на фиг. 3. На этапе S11, контроллер 14 устройства 100 подачи мощности определяет то, получается или нет сигнал запроса на очень слабое возбуждение. Когда сигнал запроса на очень слабое возбуждение получается, контроллер 14 начинает связь. Сигнал запроса на очень слабое возбуждение представляет собой сигнал, выводимый посредством устройства 200 приема мощности, когда транспортное средство 10 приближается к месту для парковки, как описано ниже.
[0045] Когда связь начинается ("Да" на этапе S11), на этапе S12, контроллер 14 подает мощность для очень слабого возбуждения в катушку 12 для передачи мощности для того, чтобы очень слабо возбуждать катушку 12 для передачи мощности.
[0046] На этапе S13, контроллер 14 определяет то, принимается или нет сигнал обнаружения транспортных средств, передаваемый посредством устройства 200 приема мощности транспортного средства 10. Когда напряжение, принимаемое посредством катушки 22 для приема мощности, достигает вышеуказанного первого порогового напряжения Vth1, модуль 23 радиосвязи передает сигнал обнаружения транспортных средств.
[0047] Когда сигнал обнаружения транспортных средств не принимается ("Нет" на этапе S13), контроллер 14 возвращает обработку на этап S12. Когда сигнал обнаружения транспортных средств принимается ("Да" на этапе S13), на этапе S14, контроллер 14 слабо возбуждает катушку 12 для передачи мощности. В частности, напряжение, определенное в катушке 22 для приема мощности, достигающее первого порогового напряжения Vth1, означает то, что катушка 22 для приема мощности достигает позиции, частично перекрывающей катушку 12 для передачи мощности, и в этом случае, устройство 200 приема мощности передает сигнал обнаружения транспортных средств (см. S33 на фиг. 4, который описывается ниже). После этого, когда сигнал обнаружения транспортных средств обнаруживается, контроллер 14 переключает возбуждение катушки 12 для передачи мощности с очень слабого возбуждения на слабое возбуждение.
[0048] На этапе S15, контроллер 14 определяет то, достигает или нет транспортное средство 10 позиции возможности заряда (позиции, в которой коэффициент связи достигает допустимого коэффициента связи) в месте для парковки. Это может определяться на основе того, принимается или нет положительный сигнал обнаружения позиции, передаваемый посредством устройства 200 приема мощности. Когда транспортное средство 10 не достигает позиции возможности заряда ("Нет" на этапе S15), контроллер 14 инструктирует обработке переходить к этапу S16. Когда транспортное средство 10 достигает позиции возможности заряда ("Да" на этапе S15), контроллер 14 инструктирует обработке переходить к этапу S17.
[0049] На этапе S16, контроллер 14 определяет то, передается или нет сигнал обнаружения транспортных средств посредством устройства 200 приема мощности. Когда сигнал обнаружения транспортных средств передается ("Да" на этапе S16), контроллер 14 возвращает обработку на этап S14. Эта обработка выполняется, например, когда транспортное средство 10 приближается к позиции возможности заряда в месте 2 для парковки, но еще не достигло позиции возможности заряда, и слабое возбуждение непрерывно выполняется в этом случае. Между тем, когда сигнал обнаружения транспортных средств не передается ("Нет" на этапе S16), на этапе S20, контроллер 14 прекращает слабое возбуждение и возвращает обработку на этап S12. Эта обработка выполняется, например, когда место 2 для парковки должно изменяться, либо когда бесконтактная подача мощности не должна выполняться, т.е. когда транспортное средство 10 отъезжает от места 2 для парковки, и контроллер 14 прекращает слабое возбуждение.
[0050] На этапе S17, контроллер 14 определяет то, что транспортное средство 10 остановлено в позиции возможности заряда в месте 2 для парковки, и передает сигнал запроса на прекращение приложения движущей силы в устройство 200 приема мощности, чтобы начинать бесконтактную подачу мощности. Сигнал запроса на прекращение приложения движущей силы представляет собой сигнал запроса для инструктирования транспортному средству 10 прекращать приведение в действие инвертора 28 и электромотора 29.
[0051] На этапе S18, контроллер 14 определяет то, принимается или нет сигнал запроса на начало заряда (S41 по фиг. 4, который описывается ниже), передаваемый посредством устройства 200 приема мощности. После этого, когда сигнал запроса на начало заряда принимается ("Да" на этапе S18), на этапе S19, контроллер 14 начинает заряд. В частности, контроллер 14 возбуждает катушку 12 для передачи мощности, чтобы подавать мощность для бесконтактной подачи мощности.
[0052] Между тем, когда сигнал запроса на начало заряда не принимается ("Нет" на этапе S18), на этапе S21, контроллер 14 определяет то, передается или нет сигнал запроса на прекращение (S42 по фиг. 4, который описывается ниже) посредством устройства 200 приема мощности. Когда сигнал запроса на прекращение не передается ("Нет" на этапе S21), контроллер 14 возвращает обработку на этап S14. Между тем, когда сигнал запроса на прекращение передается ("Да" на этапе S21), контроллер 14 прекращает обработку на этапе S22.
[0053] Как описано выше, в устройстве 100 подачи мощности, возбуждение переключается между очень слабым возбуждением и слабым возбуждением в зависимости от позиционной взаимосвязи между транспортным средством 10 и местом 2 для парковки, и бесконтактная подача мощности начинается, когда транспортное средство 10 достигает позиции возможности заряда.
[0054] Далее описываются этапы обработки, выполняемые посредством устройства 200 приема мощности, когда транспортное средство 10 движется с возможностью останавливаться в позиции возможности заряда в месте 2 для парковки, со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 4.
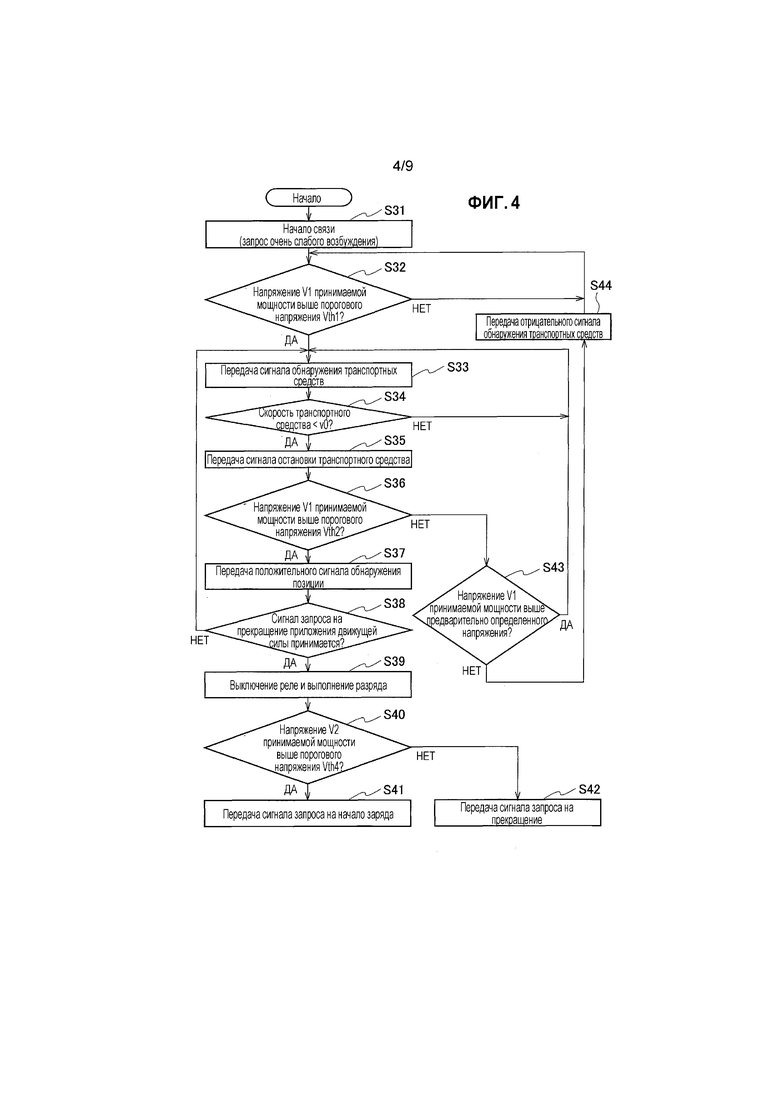
[0055] Во-первых, на этапе S31 по фиг. 4, зарядный контроллер 24 устройства 200 приема мощности начинает связь с устройством 100 подачи мощности на стороне земли и передает сигнал запроса на очень слабое возбуждение в устройство 100 подачи мощности. Эта связь выполняется между модулем 23 радиосвязи и модулем 13 радиосвязи, проиллюстрированным на фиг. 1. Начало связи в этом случае может быть инициировано посредством операции вручную пользователя, запуска системы автоматической парковки, выполнения поиска посредством устройства 200 приема мощности и т.п. Как результат, катушка 12 для передачи мощности очень слабо возбуждается (см. S12 по фиг. 3).
[0056] На этапе S32, модуль 241 определения напряжения зарядного контроллера 24 получает напряжение V1 принимаемой мощности, определенное посредством первого вольтметра 51. Напряжение V1 принимаемой мощности представляет собой переменное напряжение, сформированное в катушке 22 для приема мощности. Затем модуль 241 определения напряжения определяет то, выше или нет напряжение V1 принимаемой мощности предварительно установленного первого порогового напряжения Vth1.
[0057] Когда напряжение V1 принимаемой мощности ниже первого порогового напряжения Vth1 ("Нет" на этапе S32), зарядный контроллер 24 возвращает обработку. Когда напряжение V1 принимаемой мощности выше первого порогового напряжения Vth1 ("Да" на этапе S32), на этапе S33, зарядный контроллер 24 передает сигнал обнаружения транспортных средств, указывающий то, что транспортное средство 10 обнаруживается в месте 2 для парковки. Передача сигнала обнаружения транспортных средств вызывает переключение возбуждения катушки 12 для передачи мощности с очень слабого возбуждения на слабое возбуждение (см. S13 и S14 по фиг. 3).
[0058] На этапе S34, зарядный контроллер 24 определяет то, опускается или нет скорость транспортного средства ниже пороговой скорости v0. Скорость транспортного средства подается посредством непроиллюстрированного датчика скорости транспортного средства. Здесь, пороговая скорость v0 составляет очень низкую скорость, на которой транспортное средство 10 движется для того, чтобы совмещаться с определенной позицией в месте 2 для парковки. Следует отметить, что зарядный контроллер 24 может определять то, что скорость транспортного средства опускается ниже пороговой скорости v0, посредством обнаружения того, что позиция переключения передач транспортного средства 10 задается как парковка.
[0059] Когда скорость транспортного средства не опускается ниже пороговой скорости v0 ("Нет" на этапе S34), зарядный контроллер 24 возвращает обработку на этап S33. Между тем, когда скорость транспортного средства опускается ниже пороговой скорости v0 ("Да" на этапе S34), на этапе S35, зарядный контроллер 24 передает сигнал остановки транспортного средства в модуль 23 радиосвязи.
[0060] Затем, на этапе S36, зарядный контроллер 24 определяет то, выше или нет напряжение V1 принимаемой мощности, определенное посредством первого вольтметра 51, второго порогового напряжения Vth2.
[0061] Когда напряжение V1 принимаемой мощности ниже второго порогового напряжения Vth2 ("Нет" на этапе S36), на этапе S43, зарядный контроллер 24 определяет то, выше или нет напряжение V1 принимаемой мощности предварительно установленного предварительно определенного напряжения. "Предварительно определенное напряжение" составляет минимальное напряжение, сформированное в катушке 22 для приема мощности, когда катушка 12 для передачи мощности слабо возбуждается, и катушка 22 для приема мощности, по меньшей мере, частично перекрывает катушку 12 для передачи мощности. Когда напряжение V1 принимаемой мощности выше предварительно определенного напряжения ("Да" на этапе S43), зарядный контроллер 24 возвращает обработку на этап S33. Между тем, когда напряжение V1 принимаемой мощности ниже предварительно определенного напряжения ("Нет" на этапе S43), зарядный контроллер 24 определяет то, что транспортное средство 10 находится на большом расстоянии от места для парковки, и передает отрицательный сигнал обнаружения транспортных средств на этапе S44. Затем зарядный контроллер 24 возвращает обработку на этап S32. В частности, напряжение V1 принимаемой мощности, опускающееся ниже вышеуказанного предварительно определенного напряжения, означает то, что транспортное средство 10 отъезжает от места 2 для парковки, и зарядный контроллер 24 определяет то, что водитель изменяет место 2 для парковки либо более не имеет намерение подачи мощности, и передает отрицательный сигнал обнаружения транспортных средств.
[0062] На этапе S37, зарядный контроллер 24 определяет то, что транспортное средство 10 остановлено в позиции возможности заряда в месте 2 для парковки, и передает положительный сигнал обнаружения позиции. Как результат, положительный сигнал обнаружения позиции передается из модуля 23 радиосвязи в модуль 13 радиосвязи (см. фиг. 1) (см. S15 по фиг. 3).
[0063] На этапе S38, зарядный контроллер 24 определяет то, передается или нет сигнал запроса на прекращение приложения движущей силы транспортного средства 10 посредством устройства 100 подачи мощности и принимается или нет. В частности, зарядный контроллер 24 определяет то, передается или нет сигнал запроса на прекращение приложения движущей силы, при обработке этапа S17 по фиг. 3.
[0064] Когда сигнал запроса на прекращение приложения движущей силы не принимается ("Нет" на этапе S38), зарядный контроллер 24 возвращает обработку на этап S33. Когда сигнал запроса на прекращение приложения движущей силы принимается, зарядный контроллер 24 инструктирует обработке переходить к этапу S39.
[0065] На этапе S39, зарядный контроллер 24 выключает релейный переключатель 26 и выполняет обработку разряда сглаживающего конденсатора C3 (см. фиг. 2). Как результат, ни напряжение аккумулятора 27, ни напряжение сглаживающего конденсатора C3 не прикладывается ко второму вольтметру 52.
[0066] Затем, на этапе S40, модуль 241 определения напряжения зарядного контроллера 24 получает напряжение V2 принимаемой мощности, определенное посредством второго вольтметра 52. Напряжение V2 принимаемой мощности представляет собой постоянное напряжение, полученное после выпрямления переменного напряжения, сформированного в катушке 22 для приема мощности, с помощью выпрямительной схемы 53. Затем модуль 241 определения напряжения определяет то, выше или нет напряжение V2 принимаемой мощности предварительно установленного четвертого порогового напряжения Vth4.
[0067] Когда напряжение V2 принимаемой мощности выше четвертого порогового напряжения Vth4 ("Да" на этапе S40), транспортное средство 10 остановлено в позиции возможности заряда в месте 2 для парковки, и бесконтактная подача мощности является возможной. Соответственно, на этапе S41, зарядный контроллер 24 передает сигнал запроса на начало заряда в устройство 100 подачи мощности (см. S18 по фиг. 3). Между тем, когда напряжение V2 принимаемой мощности ниже четвертого порогового напряжения Vth4 ("Нет" на этапе S40), например, когда зазор между катушкой 12 для передачи мощности и катушкой 22 для приема мощности увеличивается вследствие высадки пассажиров, бесконтактная подача мощности не может выполняться. Соответственно, на этапе S42, зарядный контроллер 24 передает сигнал запроса на прекращение (см. S21 по фиг. 3).
[0068] Как описано выше, когда транспортное средство 10 движется (релейный переключатель 26 включен) при приближении к месту для парковки 2, чтобы выполнять бесконтактную подачу мощности, зарядный контроллер 24 определяет то, достигает или нет транспортное средство 10 позиции возможности подачи мощности, посредством использования напряжения V1 принимаемой мощности, определенного посредством первого вольтметра 51. Между тем, когда транспортное средство 10 остановлено, и релейный переключатель 26 выключается, зарядный контроллер 24 определяет то, остановлено или нет транспортное средство 10 в позиции возможности подачи мощности, посредством использования напряжения V2 принимаемой мощности, определенного посредством второго вольтметра 52.
[0069] Соответственно, можно точно определять напряжение мощности, принимаемой посредством катушки 22 для приема мощности, и точно обнаруживать то, что транспортное средство 10 остановлено в позиции возможности подачи мощности, и выполнять бесконтактную подачу мощности.
[0070] Далее описываются этапы обработки, выполняемые посредством устройства 200 приема мощности, когда транспортное средство остановлено, со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 5. Эта обработка представляет собой обработку, выполняемую, когда бесконтактная подача мощности выполняется для транспортного средства 10 в то время, когда транспортное средство остановлено в месте 2 для парковки. Следует отметить, что релейный переключатель 26 выключен.
[0071] Во-первых, на этапе S51 по фиг. 5, зарядный контроллер 24 устройства 200 приема мощности начинает связь с устройством 100 подачи мощности на стороне земли и передает сигнал запроса на очень слабое возбуждение в устройство 100 подачи мощности. Эта обработка является идентичной обработке на S31 по фиг. 4.
[0072] На этапе S52, модуль 241 определения напряжения зарядного контроллера 24 получает напряжение V2 принимаемой мощности, определенное посредством второго вольтметра 52. Напряжение V2 принимаемой мощности составляет напряжение после выпрямительной схемы 53 и представляет собой постоянное напряжение. Затем модуль 241 определения напряжения определяет то, выше или нет напряжение V2 принимаемой мощности предварительно установленного третьего порогового напряжения Vth3.
[0073] Когда напряжение V2 принимаемой мощности ниже третьего порогового напряжения Vth3 ("Нет" на этапе S52), зарядный контроллер 24 передает сигнал запроса на прекращение на этапе S57.
[0074] Когда напряжение V2 принимаемой мощности выше третьего порогового напряжения Vth3 ("Да" на этапе S52), на этапе S53, зарядный контроллер 24 передает сигнал обнаружения транспортных средств, указывающий то, что транспортное средство 10 обнаруживается. Передача сигнала обнаружения транспортных средств вызывает переключение возбуждения катушки 12 для передачи мощности с очень слабого возбуждения на слабое возбуждение (см. S14 по фиг. 3).
[0075] На этапе S54, зарядный контроллер 24 определяет то, выше или нет напряжение V2 принимаемой мощности, определенное посредством второго вольтметра 52, четвертого порогового напряжения Vth4.
[0076] Когда напряжение V2 принимаемой мощности ниже четвертого порогового напряжения Vth4 ("Нет" на этапе S54), на этапе S57, зарядный контроллер 24 передает сигнал запроса на прекращение. В частности, когда напряжение V2 принимаемой мощности, определенное посредством второго вольтметра 52, ниже третьего порогового напряжения Vth3 ("Нет" в S52) и ниже четвертого порогового напряжения th4 ("Нет" в S54), бесконтактная подача мощности не может выполняться в текущей позиции остановки транспортного средства 10, и зарядный контроллер 24 в силу этого передает сигнал запроса на прекращение. Эта ситуация может возникать, например, когда транспортное средство 10 остановлено в позиции возможности заряда в месте 2 для парковки, и затем транспортное средство перемещается вследствие некоторой причины, либо зазор между катушкой 12 для передачи мощности и катушкой 22 для приема мощности увеличивается вследствие высадки пассажира.
[0077] Между тем, когда напряжение V2 принимаемой мощности выше четвертого порогового напряжения Vth4 ("Да" на этапе S54), на этапе S55, зарядный контроллер 24 передает положительный сигнал обнаружения позиции. Затем на этапе S56, зарядный контроллер 24 передает сигнал запроса на начало заряда. Вышеуказанная обработка этапа S18 на фиг. 3 выполняется в ответ на этот сигнал запроса на начало заряда, и бесконтактная подача мощности начинается.
[0078] Как описано выше, когда транспортное средство 10 остановлено в месте 2 для парковки, чтобы выполнять бесконтактную подачу мощности (когда релейный переключатель 26 выключен), зарядный контроллер 24 определяет то, находится или нет транспортное средство 10 в позиции возможности подачи мощности, посредством использования напряжения V2 принимаемой мощности, определенного посредством второго вольтметра 52. Соответственно, можно точно определять напряжение мощности, принимаемой посредством катушки 22 для приема мощности, и точно обнаруживать то, что транспортное средство 10 остановлено в позиции возможности подачи мощности, и выполнять бесконтактную подачу мощности.
[0079] Описание преимуществ варианта осуществления
Как описано выше, в системе 1 бесконтактной подачи мощности согласно варианту осуществления, когда транспортное средство 10 остановлено, и релейный переключатель 26 выключен, напряжение принимаемой мощности определяется на основе напряжения, определенного посредством второго вольтметра 52, предоставленного после выпрямительной схемы 53. Кроме того, когда транспортное средство 10 движется, напряжение принимаемой мощности определяется на основе напряжения, определенного посредством первого вольтметра 51, предоставленного до выпрямительной схемы 53. Соответственно, можно точно определять напряжение, сформированное в катушке 22 для приема мощности, без переключения состояния релейного переключателя 26, когда катушка 12 для передачи мощности очень слабо возбуждается или слабо возбуждается. Как результат, транспортное средство 10 может точно совмещаться.
[0080] Описание модифицированных примеров
Хотя предусмотрена такая конфигурация, в которой первый вольтметр 51 предоставляется между двумя входными контактными выводами выпрямительной схемы 53, и второй вольтметр 52 предоставляется между двумя выходными контактными выводами выпрямительной схемы 53, как проиллюстрировано на фиг. 2 в вышеуказанном варианте осуществления, настоящее изобретение не ограничено этой конфигурацией. Нет необходимости ограничивать позиции вольтметров этими позициями при условии, что напряжение на стороне входного вала и напряжение на стороне выходного вала могут измеряться.
[0081] Например, как проиллюстрировано на фиг. 6, вольтметр может предоставляться между двумя контактными выводами катушки 22 для приема мощности (P1 ссылки с номером) или между обоими концами конденсатора C1 (ссылка с номером P2).
[0082] Кроме того, как проиллюстрировано на фиг. 7, конфигурация может быть такой, что три конденсатора C11, C12 и C13 предоставляются для катушки 22 для приема мощности, и вольтметр предоставляется между обоими контактными выводами (P3 ссылки с номером) конденсатора C11 или между обоими контактными выводами (ссылка с номером P4) конденсатора C12. Кроме того, как проиллюстрировано на фиг. 8, конфигурация может быть такой, что четыре конденсатора C21, C22, C23 и C24 предоставляются, и вольтметр предоставляется между обоими контактными выводами (ссылки с номерами P5-P8) любого из конденсаторов C21-C24.
[0083] Кроме того, в вышеуказанном варианте осуществления, предусмотрена такая конфигурация, в которой первый вольтметр 51 предоставляется между двумя входными контактными выводами выпрямительной схемы 53, и второй вольтметр 52 предоставляется между двумя выходными контактными выводами выпрямительной схемы 53, как проиллюстрировано на фиг. 2. В этом случае, напряжение мощности, принимаемой посредством катушки 22 для приема мощности, варьируется между случаем, в котором катушка 12 для передачи мощности очень слабо возбуждается, и случаем, в котором катушка 12 для передачи мощности слабо возбуждается. Соответственно, как проиллюстрировано на фиг. 9 и 10, напряжение принимаемой мощности в каждом возбужденном состоянии может измеряться с помощью вставленных делительных резисторов.
[0084] Как проиллюстрировано на фиг. 9, сопротивление R1 и схема последовательно соединенных сопротивлений R2 и R3 вставляются между двумя шинами. Затем, при очень слабом возбуждении напряжение, сформированное между обоими контактными выводами сопротивления R1, определяется и подвергается RMS-преобразованию в схеме 62 RMS-преобразования. Между тем, при слабом возбуждении, напряжение, сформированное между обоими концами сопротивления R2, определяется и подвергается RMS-преобразованию в схеме 61 RMS-преобразования. После этого сигнал, выводимый из каждой из схем 61 и 62 RMS-преобразования, выводится посредством использования схемы 63 мультиплексора. Это обеспечивает возможность регулирования уровня выводимого напряжения в пределах определенного диапазона, когда напряжение принимаемой мощности, определенное при очень слабом возбуждении, и напряжение принимаемой мощности, определенное при слабом возбуждении, отличаются друг от друга.
[0085] Например, когда напряжение принимаемой мощности, определенное при слабом возбуждении, составляет числовое значение, в десять раз превышающее напряжение принимаемой мощности, определенное при очень слабом возбуждении, значение сопротивления для сопротивления R3 задается приблизительно в десять раз превышающим значение сопротивления для сопротивления R2. Как результат, можно уменьшать динамический диапазон при определении напряжения в модуле 241 определения напряжения, проиллюстрированном на фиг. 1.
[0086] Кроме того, как проиллюстрировано на фиг. 10, схема последовательно соединенных сопротивлений R4 и R5 вставляется между двумя шинами. В этом случае, значение сопротивления для сопротивления R4 меньше значения сопротивления для сопротивления R5. Другими словами, R4<R5. При очень слабом возбуждении, определяется напряжение между обоими контактными выводами сопротивления R5, и при слабом возбуждении, определяется напряжение между обоими контактными выводами сопротивления R4. Затем напряжение передается в схему 65 RMS-преобразования через мультиплексор 64 и после этого подвергается RMS-преобразованию в схеме 65 RMS-преобразования. Например, когда напряжение принимаемой мощности, определенное при слабом возбуждении составляет числовое значение, в десять раз превышающее напряжение принимаемой мощности, определенное при очень слабом возбуждении, значение сопротивления для сопротивления R5 может задаваться приблизительно в десять раз превышающим значение сопротивления для сопротивления R4.
[0087] Также в этой конфигурации, можно уменьшать динамический диапазон при определении напряжения в модуле 241 определения напряжения, аналогично вышеуказанной схеме, проиллюстрированной фиг. 9. В частности, можно уменьшать динамический диапазон в модуле 241 определения напряжения посредством предоставления схемы делителя напряжения с двумя или более коэффициентами деления напряжения, отличающимися друг от друга, до выпрямительной схемы 53 и определения напряжения при одновременном переключении коэффициента деления напряжения, который должен применяться в зависимости от изменения возбуждения катушки 12 для передачи мощности.
[0088] Хотя выше описываются способ обнаружения позиции катушки для системы бесконтактной подачи мощности и устройство приема мощности настоящего изобретения на основе проиллюстрированного варианта осуществления, настоящее изобретение не ограничено ими, и конфигурации частей могут заменяться посредством любых конфигураций, имеющих аналогичные функции.
Список номеров ссылок
[0089] 1 - система бесконтактной подачи мощности
2 - место для парковки
10 - транспортное средство
11 - контроллер мощности
12 - катушка для передачи мощности
13 - модуль радиосвязи
14 - контроллер
22 - катушка для приема мощности
23 - модуль радиосвязи
24 - зарядный контроллер
25 - выпрямитель
26 - релейный переключатель (релейная схема)
27 - аккумулятор
28 - инвертор
29 - электромотор
50 - схема приведения в действие
51 - первый вольтметр
52 - второй вольтметр
53 - выпрямительная схема
61, 62, 65 - RMS-преобразователь
63, 64 - мультиплексор
100 - устройство подачи мощности
110 - источник мощности переменного тока
111 - выпрямитель
112 - PFC-схема
113 - инвертор
114 - источник мощности постоянного тока
141 - контроллер инвертора
142 - PFC-контроллер
143 - контроллер последовательности
200 - устройство приема мощности
241 - модуль определения напряжения
C3 - сглаживающая катушка
Изобретение относится к области электротехники. Технический результат заключается в возможности точного совмещения передающей и приемной катушек индуктивности без переключения реле во время совмещения. Предусмотрен способ обнаружения позиции катушки для системы бесконтактной подачи мощности, выполненной с возможностью подавать мощность из катушки (12) для передачи мощности на стороне земли в катушку (22) для приема мощности на стороне транспортного средства, посредством которой обнаруживается позиция катушки (22) для приема мощности. Выходные контактные выводы выпрямительной схемы (53), выполненной с возможностью выпрямлять мощность переменного тока, принимаемую посредством катушки (22) для приема мощности, соединяются со схемой (50) приведения в действие и аккумулятором (27). Кроме того, релейный переключатель (26) предоставляется между аккумулятором (27) и одним из выходных контактных выводов выпрямительной схемы (53). Когда релейный переключатель (26) включен, позиция катушки обнаруживается на основе переменного напряжения, определенного посредством первого вольтметра (51), предоставленного до выпрямительной схемы (53), а когда релейный переключатель (26) выключен, позиция катушки обнаруживается на основе постоянного напряжения, определенного посредством второго вольтметра (52), предоставленного после выпрямительной схемы (53). 2 н. и 1 з.п. ф-лы, 10 ил.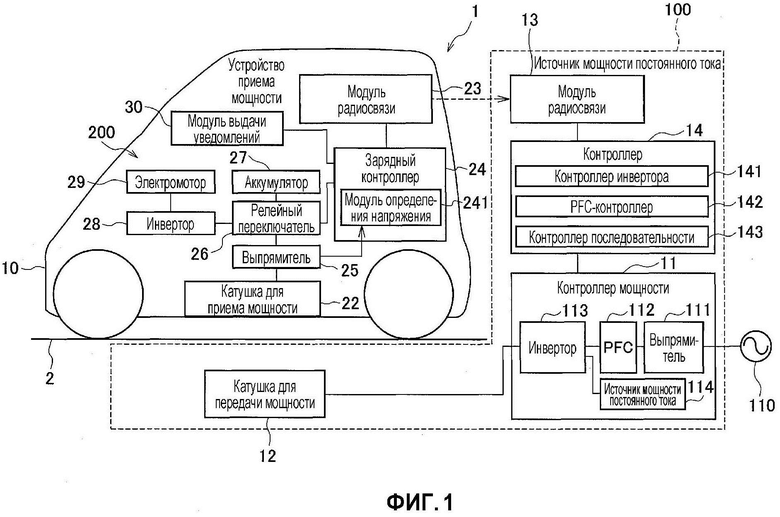
1. Способ обнаружения позиции катушки для системы бесконтактной подачи мощности, выполненной с возможностью подавать мощность из катушки для передачи мощности на стороне земли в катушку для приема мощности на стороне транспортного средства, посредством которой обнаруживают позицию катушки для приема мощности, содержащий этапы, на которых:
- когда релейная схема включена, обнаруживают позицию катушки на основе переменного напряжения, определенного до выпрямительной схемы, выполненной с возможностью выпрямлять мощность переменного тока, принимаемую посредством катушки для приема мощности, релейной схемы, предоставленной между аккумулятором и выпрямительной схемой, а также схемы приведения в действие, соединенной с выпрямительной схемой; и,
- когда релейная схема выключена, обнаруживают позицию катушки на основе постоянного напряжения, определенного после выпрямительной схемы.
2. Способ обнаружения позиции катушки для системы бесконтактной подачи мощности по п. 1, в котором:
- до выпрямительной схемы предоставляется схема делителя напряжения с двумя или более коэффициентами деления напряжения, отличающимися друг от друга, и
- напряжение определяют с подлежащим применению коэффициентом деления напряжения, измененным в зависимости от изменения возбуждения катушки для передачи мощности.
3. Устройство приема мощности, содержащее:
- катушку для приема мощности, выполненную с возможностью бесконтактно принимать мощность переменного тока, передаваемую из катушки для передачи мощности на стороне земли;
- выпрямительную схему, выполненную с возможностью выпрямлять мощность переменного тока, принимаемую посредством катушки для приема мощности;
- схему приведения в действие, соединенную с выпрямительной схемой;
- аккумулятор, выполненный с возможностью накапливать мощность постоянного тока, полученную через выпрямление посредством выпрямительной схемы;
- релейную схему, предоставленную между аккумулятором и выпрямительной схемой, а также схемой приведения в действие; и
- схему обнаружения позиции катушки, выполненную с возможностью обнаруживать позицию катушки для приема мощности посредством определения напряжения для мощности, принимаемой посредством катушки для приема мощности, когда катушка для передачи мощности возбуждается, при этом:
- схема обнаружения позиции катушки обнаруживает позицию катушки для приема мощности на основе переменного напряжения, определенного до выпрямительной схемы, когда релейная схема включена, и обнаруживает позицию катушки для приема мощности на основе постоянного напряжения, определенного после выпрямительной схемы, когда релейная схема выключена.
| US 2015224833 A1, 13.08.2015 | |||
| УСТРОЙСТВО БЕСКОНТАКТНОЙ ПОДАЧИ ЭЛЕКТРИЧЕСТВА | 2012 |
|
RU2557785C1 |
| СИСТЕМА СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ СИСТЕМУ СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ, И СПОСОБ СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557647C2 |
| WO 2015173614 A1, 19.11.2015. | |||

